Fallstudie: Nanoroboter, Utopie oder Realität
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Fachhochschule Nordwestschweiz
Life Science Technologies
Fallstudie:
Nanoroboter, Utopie oder Realität
Abgabetermin: 06. Juni 2011
Autoren: Daniel Xander, Simon Bachler, John Truong
Modul: Mikrosysteme
Dozent: Dr. Marc Dusseiller
Ort, Datum: Basel, 05. Juni 2011
LST Vollzeit 2009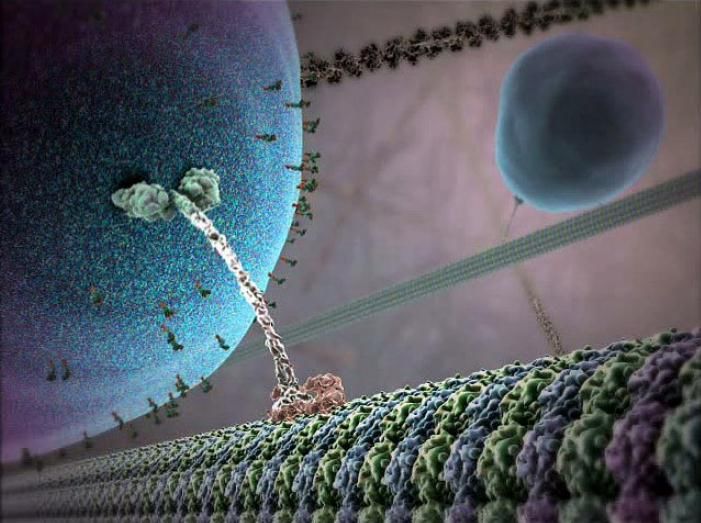
Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität Zusammenfassung Nanotechnologie gilt als eine der wichtigsten Zukunftstechnologien. Die potentiellen Möglichkeiten welche uns Nanoroboter in der Medizin bieten könnten, von der einfachen Wirkstoffdistribution über ein vollständiges Ersatzimmunsystem bis hin zur Regeneration von ganzen Gliedmassen oder Organen, scheinen schier Unglaublich. Diese Fallstudie soll erörtern wie gross die Kluft zwi- schen Realität und Fantasie heute ist. Verschiedenen Beispiele aus Forschung und Industrie wur- den zusammengestellt um die Frage zu beantworten: Was können Nanoroboter heute und zu was sind sie in naher Zukunft fähig? Zur selben Zeit werden auch viele fiktionale Beispiele aus der Un- terhaltungswelt beschrieben, um einerseits zu zeigen wie bekannt Nanoroboter mittlerweile in der breiten Öffentlichkeit sind, und auf der anderen Seite eine Verknüpfung zwischen Wissenschaft, welche nur auf Daten und Fakten basiert, und Utopie herzustellen. 05.06.2011 II
Mikrosysteme
Fallbeispiel: Nanoroboter, Utopie oder Realität
Inhaltsverzeichnis
Zusammenfassung ...................................................................................................................II
Inhaltsverzeichnis ....................................................................................................................III
1 Einleitung ...........................................................................................................................1
2 Utopie..................................................................................................................................1
2.1 Traum .........................................................................................................................1
2.2 Nanoroboter in der Unterhaltungswelt .........................................................................2
2.2.1 Literatur ..............................................................................................................2
2.2.2 Filme und Serien ................................................................................................3
2.2.3 Spiele .................................................................................................................4
2.2.4 Fazit ...................................................................................................................5
3 Realität ................................................................................................................................6
3.1 Geschichte ..................................................................................................................6
3.2 Was ist heute möglich? ...............................................................................................6
3.2.1 Allgemein ...........................................................................................................6
3.2.2 Nanowürfel als Extremspeicher ..........................................................................7
3.2.3 Nanogenerator ...................................................................................................7
3.2.4 Aktorik ................................................................................................................8
3.2.5 Mikrotubuli gestützte Nanomaschinen ................................................................9
3.2.6 Fortbewegung Mithilfe von der DNA .................................................................13
3.3 Zukunft ......................................................................................................................15
3.3.1 Respirocyten ....................................................................................................15
3.4 Problemstellungen der Nanotechnologie ...................................................................15
3.4.1 Informationsspeicher ........................................................................................15
3.4.2 Energieversorgung ...........................................................................................16
3.4.3 Grösse und Bewegung .....................................................................................16
3.4.4 Oberfläche .......................................................................................................16
4 Fazit / Ausblick .................................................................................................................17
5 Anhang .............................................................................................................................18
5.1 Glossar ....................................................................................................................18
5.2 Abkürzungsverzeichnis .............................................................................................19
5.3 Literatur.....................................................................................................................20
5.4 Abbildungs- und Tabellenverzeichnis ........................................................................21
5.4.1 Seitenangabe der Abbildungen: .......................................................................21
5.4.2 Quellenangabe des Abbildungsverzeichnisses:................................................21
5.5 Authentizitätserklärung..............................................................................................22
05.06.2011 III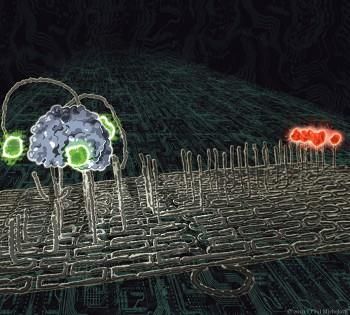
Mikrosysteme
Fallbeispiel: Nanoroboter, Utopie oder Realität
1 Einleitung
Ein Nanoroboter ist eine kleine Maschine, die gebaut ist, um eine spezifische Arbeit oder Arbeits-
wiederholungen auf der nanoskopischen Ebene präzise auszuführen. Einige Nanometer (nm) ist
bekanntlich der milliardste Teil eines Meters (10-9 = 0,000 000 001 m). Ein Nanometer ist somit
zehnmal so gross wie ein Wasserstoffatom und 50„000-mal kleiner als der Durchmesser eines
menschlichen Haares. Zur Veranschaulichung kann der folgende Vergleich dienen: Ein Nanoparti-
kel ist im Verhältnis Fussball so gross wie der Fussball im Vergleich zu der Erde.1 Nanoroboter
sind in vielen Bereichen einsetzbar. Potenzielle Anwendungen sind Montage und Instandhaltung
von kleinen Bauelementen und Schaltungen. Ausserdem wünscht man sich auch in der Medizin
einsetzbare Nanoroboter. Im Idealfall können sich Nanoroboter auch Kopien von sich selbst repro-
duzieren und so an Aufgabenstellungen anpassen.
Nanoroboter sind speziell in der Medizinindustrie interessant. Vorstellungen, dass eine Flotte von
Nanoroboter beispielsweise als Antikörper bei Patienten einsetzt werden kann, um das Immunsys-
tem zu stärken oder bei der Bekämpfung von Krebszellen. Es gibt noch weitere potentielle medizi-
nische Anwendungen von Gewebe reparieren über Blutgefässe freisetzten bis hin zum kompletten
Organersatz.
Der grösste Vorteil von Nanoroboter wäre theoretisch gesehen die Haltbarkeit. In der Theorie
könnten diese Roboter für Jahre, Jahrzehnte wenn nicht Jahrhunderte operieren. Systeme die auf
Nanoskala beruhen, können auch aufgrund der kürzeren Verschiebungen viel schneller operieren.
Das bedeutet mechanisch und elektrisch mehr Aufgaben in weniger Zeit.2
2 Utopie
2.1 Traum
In wenigen Jahrzehnten werden Ärzte kleine Maschinen in unseren Körper injizieren, um diesen zu
diagnostizieren und Krankheiten zu heilen. Das Zeitalter der Nanomedizin ist angebrochen.
Ein junger Mann geht in die Arztpraxis. Er hat leichtes Fieber, eine verstopfte Nase und Kopf-
schmerzen. Der Arzt nimmt ein kleines Gerät aus seiner Hosentasche, dass mit einer kleinen
selbststerilisierte Sonde ausgestattet ist. Diese wird auf die Zunge des Patienten gepresst. Auf der
Spitze der Sonde sind Millionen von molekularen Rezeptoren, die gegenüber der chemischen Sig-
natur einer bestimmten Art von Bakterien oder Viren empfindlich sind. Nur wenige Sekunden spä-
ter werden auf dem Display des Gerätes Daten angezeigt, welche die einzigartige molekulare Sig-
natur eines bekannten und unerwünschten bakteriellen Erregers enthüllen.1
Nachdem der Erreger identifiziert wurde, könnten andere Nanoroboter ihn ausfindig machen und
neutralisieren. Innerhalb weniger Stunden wäre die Krankheit besiegt.
Dieser Traum ist vieleicht schon bald Realität. Die Methoden der inneren Medizin, die Diagnostik
und die Analyse von Krankheitssymptomen, haben sich im Vergleich zur Chirurgie in den letzten
Jahren nicht so rasant weiterentwickelt. Nanoroboter würden einen Quantensprung in dieser Fach-
richtung ermöglichen.
In weiter Zukunft der Nanotechnologie kann zum Beispiel ein verlorener Arm nach einem schweren
Autounfall in einer modernen Arztpraxis mit Hilfe von Nanorobotern wiederhergestellt werden.
Innerhalb von einem halben Tag könnte die verunfallte Person wieder nach Hause. Solche Träume
sind in vielen Science Fiction Filmen wie z.B. Star Trek zu sehen. Mehr dazu im Kapitel 2.2
1
Vgl. URL: www.mic-net.de/nano/downloads/FN_Tipps.pdf [Stand: 01.06.2011].
2
Vgl. Diwan & Bharadwajl (2006): S. 1-75
05.06.2011 1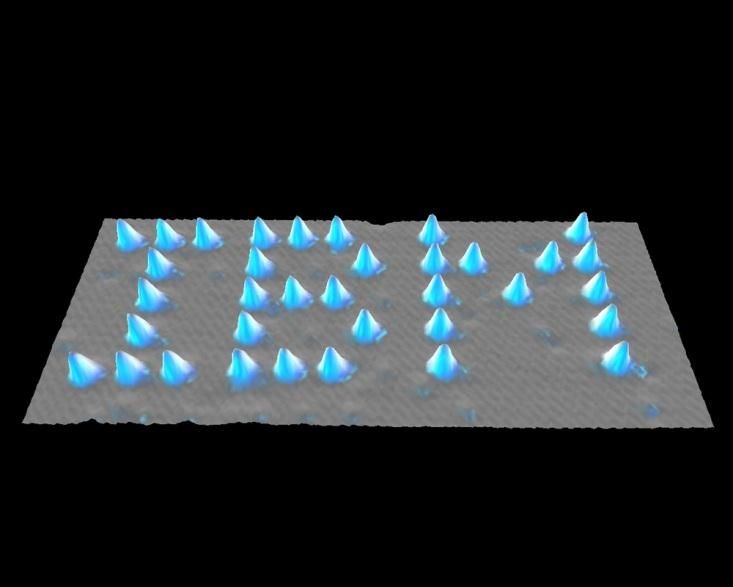
Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität 2.2 Nanoroboter in der Unterhaltungswelt Der Begriff „ Nano“ steht mittlerweile immer öfters als Sinnbild für die Wissenschaft der Zukunft. Unterschiedlichste Unterhaltungsmedien nutzen die Vorstellung von winzigen Maschinen um ein Publikum zu begeistern. Im Folgenden werden ein paar dieser Medien und deren Rolle bei der Kommunikation der Idee, Nanoroboter, an die breite Öffentlichkeit näher beschrieben. 2.2.1 Literatur Science Fiction, die Mischung aus Kunst und Wissenschaft, ermöglicht es wissenschaftliche An- sätze, welche nur wenige überhaupt begreifen können, in einer einfacheren und interessanteren Form darzustellen. Einer Form in der sich auch eine Person ohne tiefgehenden naturwissenschaft- lichen Hintergrund ein klares Bild einer Technologie machen kann. Science Fiction wird also oft genutzt um Technologien an die breite Öffentlichkeit zu tragen, um Möglichkeiten aufzuzeigen. Auch das Thema Nanotechnologie hat so schon vielfach Verwendung in literarischen Werken, sei- en es Comics oder vollwertige Romane, gefunden. Winzig kleine Roboter wurden schon im Jahre 1957 von dem visionären deutschen Schriftsteller Ernst Jünger in seinem Roman „Gläserne Bie- nen“3 geschildert. Man merke, dass geschah noch vor Veröffentlichung von Richard P. Feynmans Rede, “There‟s Plenty of Room at the Bottom“4. Ein Jahrzehnt später, im Jahre 1967, sind es ein weiteres Mal Insek- ten, wie sie im Roman „Der Unbesiegbare“ von Stanis- law Lem5 beschrieben werden. Sie zeigen ähnliche Funktionalitäten auf wie man sie von heutigen Nanoro- botern erwarten könnte. Desto weiter Nanotechnologie und -forschung sich entwickelte desto mehr Ideen be- kamen Autoren für ihre Werke geliefert. Mit fortschrei- tender Zeit stieg so nicht nur die Anzahl von wissen- schaftlichen Projekten auf dem Gebiet der Nanotech- nologie, sondern auch die Anzahl der fiktionalen Bü- cher zu diesem Thema immer weiter an. Heute gibt es in der Sci-Fi Literatur erstaunlich viele Beispiele dafür wie Nanoroboter und Nanotechnologie mehr und mehr Teil des öffentlichen Gedankenguts werden. Einge- hend mit Nanorobotern beschäftigen sich Werke wie Greg Egan‟s Diaspora6, Jeff Carlson Nano7, oder Neal Stephenson Die Grenzwelt8. Geht es einzig und allein um die Erwähnung oder Nutzung von Nanotechnolo- gie, ohne genauere Erläuterung von Details, könnte man diese Liste fast endlos fortsetzen. Erwähnenswert ist hierbei auf jeden Fall noch das wohl bekannteste Beispiel, der Michael Crichton Bestseller Roman „Prey“9. Die Geschichte des Romans dreht sich Abbildung 2-1: Buchcover, Gläserne Bienen um einen ehemaligen Informatiker welcher mit seinem Wissen bei einem Notfall in einer Forschungseinrichtung aushelfen soll. In dieser sind Nanoroboter über ein schlecht gesichertes Lüftungssystem entkommen und beginnen jetzt ausserhalb der Ein- 3 Vgl. Jünger (1990): S. 124 4 Vgl. Feynman,Richard P., “There‟s Plenty of Room at the Bottom,” Präsentation an der American Physical Society Conference in Caltech, Californien (1959). 5 Vgl. Lem (1967): S.104 6 Vgl. Egan (2000): S. 1-352 7 Vgl. Carlson (2008) S. 1-400 8 Vgl. Stephenson (2001) S. 1-567 9 Vgl. Crichton (2002): S.1-509. 05.06.2011 2
Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität richtung autonom zu handeln. Sie gewinnen ihre Energie aus dem Sonnenlicht und sehen anfangs Tiere und später auch Menschen als ihre Beute, engl. Prey, an. Auch die Welt der Comics ist mit Begriffen und Ideen der Nanotechnologie durchsetzt. Insbeson- dere die japanischen Mangas, welche sehr oft in einem Zukunftsszenario angesiedelt sind, nutzen die Welt der Nanoroboter. Ein bekanntes Beispiel ist die Battle Angel Alita10 Reihe. Sie spielt in einer postapokalyptischen Zukunft und ein wichtiger Charakter, Desty Nova, ist Nanowissenschaft- ler. Nova ist durch Nanomaschinen in seinem Körper in der Lage einen Verlust von Gliedmassen von innen zu reparieren. Blickt man auf den westlichen Comicmarkt, kann man in vielen Universen des amerikanischen Verlags Marvel Nanoroboter entdecken. Beispiele hierfür sind die Spiderman oder auch die Hulk Comic Reihe.11 2.2.2 Filme und Serien Die Idee Gegenstände und sogar Lebewesen auf eine mikroskopische Grösse zu schrumpfen geistert schon seit mehr als einem halben Jahrhundert durch die kreativen Köpfe Hollywoods. Besonders der Ansatz Menschen zu schrumpfen, wurde schon in unzähligen Verfilmungen näher beschrieben. Zum ersten Mal im Jahre 1957 in „Die unglaubliche Ge- schichte des Mr. C“12. Das Mikro-Menschen auch eine medizinische Problemstellung innerhalb des menschli- chen Organismus lösen könnten, wird zum ersten Mal im Klassiker “ Die phantastische Reise”13 gezeigt. Hier ver- sucht ein Forscherteam, welches mit einer Art „U-Boot“ durch den Blutkreislauf des Patienten reist, in dessen Gehirn zu gelangen, um dort ein Blutgerinnsel zu lösen. Bei genauerer Betrachtung fällt auf das Nanotechnologie besonders in filmischen Werken aus jüngerer Zeit immer öfters eine grosse Rolle besitzt. Nanoroboter werden hier meist als Naniten, oder einfach Englisch Nanites, be- zeichnet. Solche Naniten sieht man in Science Fiction Filmen, wie I„ Robot14. Hier werden sie genutzt um einen Roboternetzwerk zu infiltrieren und zu zerstören. Auch in der Weltraumserie Star Trek15 hatten die Naniten schon im Jahre 1989, in Folge eins der dritten Staffel, ihren auf- tritt. Die in Einzelepisoden aufgebaute Science Fiction Reihe Outer Limits16 besitzt ebenfalls eine ganze Episo- de, die sich voll und ganz den nanometergrossen Ma- Abbildung 2-2: Filmplakat, Fantastic Voyage schinen und ihren Fähigkeiten widmet. Auffällig ist dass die Nanoroboter in den meisten Fällen, wie so oft wenn sich Filmstudios mit künstlicher Intelligenz und Robotern auseinandersetzen, als Bedrohungen dargestellt werden. Diese Bedrohung kommt in dem 2008 erschienen Remake des Klassikers „Der Tag an dem die Erde stillstand“17 zu ihrem vorläufigen Höhepunkt. Hier wird das Ende der Welt von einem riesigen Schwarm aus sich selbst vermehrenden und alles zerstörenden Maschinen, welche von Ausser- irdischen auf die Erde gebracht wurden, eingeläutet. Eine brachiale Visualisierung des Grey-Goo18 Szenarios wie es sich Hollywood vorstellt. Was allgemein bei der Betrachtung von Nanotechnolo- 10 Vgl. URL: http://en.wikipedia.org/wiki/List_of_Battle_Angel_Alita_characters#Desty_Nova [Stand: 4.06.2011]. 11 Vgl. URL: http://en.wikipedia.org/wiki/Talk:Nanotechnology_in_fiction/In_Popular_Culture [Stand: 4.06.2011]. 12 Vgl. URL: http://www.imdb.de/title/tt0050539/ [Stand: 4.06.2011]. 13 Vgl. URL: http://www.imdb.de/title/tt0060397/ [Stand: 4.06.2011]. 14 Vgl. URL: http://www.imdb.de/title/tt0343818/ [Stand: 4.06.2011]. 15 Vgl. URL: http://www.dippold.org/startrek/serien/tng/3_1.PHP [Stand: 4.06.2011]. 16 Vgl. URL: http://www.imdb.com/title/tt0667978/ [Stand: 4.06.2011]. 17 Vgl. URL:http://www.imdb.com/title/tt0970416/ [Stand: 4.06.2011]. 18 Vgl. URL: http://en.wikipedia.org/wiki/Grey_goo [Stand: 4.06.2011]. 05.06.2011 3
Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität gie in Filmen auffällt ist, dass diese erst in jüngerer Zeit, den letzten zwei Jahrzehnten, häufiger involviert wird. Riesige Raumschiffe, interstellare Reisen und Zeitsprünge sind schon seit Beginn der ersten Sci-Fi Serien wie Star Trek, Ende der 60er Jahre und sogar noch früher gang und gäbe. Der Welt der Nanoroboter hingegen wurde lange Zeit nur wenig Beachtung geschenkt. Sie waren noch nicht gesellschaftstauglich und nicht vorstellbar. Man muss sich hierbei natürlich immer vor Augen halten, dass der Grund hierfür schlicht und einfach war, dass Nanowissenschaften eine noch sehr junge Richtung in der Wissenschaft sind und sie den zuständigen Autoren somit einfach nicht bekannt waren.11 2.2.3 Spiele Besonders die Welt der Videospiele scheint dem Thema Nanotechnologie sehr offen entgegen zu stehen. Dies hängt mitunter sicher damit zusammen dass die Computerspieleindustrie eine noch sehr junge Industrie ist. Sie hatte, anders als zum Beispiel die Filmindustrie, ihren Durchbruch zur breiten Bevölkerung in einer Zeit in welchen Begriffen wie Nanotechnologie oder Nanoroboter schon in grösserem Masse massentauglich waren. Insbesondere die Möglichkeit den menschlichen Körper mittels Nanotechnologie zu modifizieren, ihn agiler, stärker oder resistent gegen Umwelteinflüsse zu machen, ermöglicht es Spieledesignern ihre Charaktere für den Spieler interessanter und abwechslungsreicher zu gestalten . Ein berühmtes Beispiel für den Einsatz von Nanotechnologie ist die Metal Gear Solid 19 Reihe. In diesem Action-Adventure wird die Fernkommunikation, inklusive Übersetzung verschiedener Sprachkodierungen, von Nanomaschinen übernommen, die dem Hauptprotagonisten bei Missi- onsbeginn injiziert werden. Auch sind die injizierten Nanoroboter in der Lage vitale Signale zu überwachen und Wunden von innen medizinisch zu versorgen. Im vierten Teil der Reihe wird Na- nomaschinen ein noch grösserer Anteil an der Geschichte eingeräumt. Die gegnerischen Soldaten werden hier durch miteinander vernetze Nanomaschinen gesteuert. Eine medizinische Unterstützung wird in vielen Spielen mittels Nanorobotern geregelt. Neben dem bereits genannten Metal Gear Solid dienen sie in Galaxy Angel, der Xenosaga Reihe und sogar bei dem Kämpfer Smoke20 aus der Kampfspielreihe Mortal Kombat zum Auffrischen der Lebens- punkte. Selbst die weniger für ihre Hintergrundgeschichte bekannte Unreal Tournament Reihe be- sitzt eine Rasse namens Necris21. Bei diesen Kämpfern wurde der Blutkreislauf durch Nanoblack, eine aus Nanorobotern bestehende schwarze Flüssigkeit, ersetzt. Ein Spiel das völlig in die Welt der Nanotechnologie eintaucht ist das äusserst Brutale Hack and Slay Spiel „NanoBreaker“22 aus dem Jahre 2005. Es spielt im Jahre 2021, hier existiert eine Insel namens Nanomachine Island. Auf dieser Insel wurden viele Forscher zusammengebracht um Nanotechnologie Zivil und Militä- risch zu entwickeln. Natürlich geht dabei nicht alles wie gewünscht und es wird Hauptaufgabe einen Computer zu deaktivieren der sämtliche Nanoroboter steuert. In der virtuellen Welt wird der Ausdruck Nano auch immer öfters ohne genau Erklärungen genutzt. So zum Beispiel bei dem vor allem wegen seiner Grafik begeisternden „Crysis“23 und dessen Fortsetzungen. Hier agiert der Spieler in einem Nanosuit, einem Schutzanzug. Was dieser genau mit Nanotechnologie zu tun hat wird nicht im Spiel und auch nicht in offiziellen Statements erläutert. Nano scheint einfach für, wis- senschaftlich, neu und aufregend zu stehen. Als weiteres erwähnenswerte Spiel ist Deus Ex zu nennen, welches sich ebenfalls tiefgehender mit Nanotechnologie auseinandersetzt. Dies wurde aber im letztjährigen Dokument24 schon gut und ausführlich beschrieben. Es ist also zu sehen, dass Spiele völlig unterschiedlicher Genres sich dem Thema Nanotechnologie annähern. Dies 19 Vgl. URL:http://metalgear.wikia.com/wiki/Nanomachine[Stand: 4.06.2011]. 20 Vgl. URL: http://mortalkombat.wikia.com/wiki/Smoke [Stand: 4.06.2011]. 21 Vgl. URL: http://liandri.beyondunreal.com/Necris [Stand: 4.06.2011]. 22 Vgl. URL: http://en.wikipedia.org/wiki/Nano_Breaker[Stand: 4.06.2011]. 23 Vgl. URL: http://crytek.com/games/crysis/overview[Stand: 4.06.2011]. 24 Vgl.URL:http://www.dusseiller.ch/mis_wiki/index.php?title=Nanoroboter,_Utopie_oder_Realit%C3%A4t#Nanoroboter_i n_Science_Fiction[Stand: 4.06.2011]. 05.06.2011 4
Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität geschieht in seltenen Fällen relativ umfassend, meist jedoch sehr oberflächlich, oder gar fast ohne genaue Erläuterungen.11 2.2.4 Fazit Nanotechnologie und die auf ihr basierenden Nanoroboter sind heute quer durch alle Unterhal- tungsmedien hindurch bekannt. Sie tauchen in unzähligen Büchern, Filmen und Spielen auf und sind wie viele andere futuristische Technologien Grundlage für interessante Geschichten. Die Au- toren und Designer halten sich nicht an den realen Stand der Technik. Sie nutzen ihre Fantasie um viele von der Wissenschaft noch gar nicht beachte Möglichkeiten aufzuzeigen. Diese Möglichkei- ten sind für den Betrachter spektakulär in Szene gesetzt und machen das Thema so höchstinte- ressant. Was hierbei jedoch von fast allen Autoren ausser Acht gelassen wird, sind technische Details. Vor allem diejenigen welche die grossen technischen Problemstellungen Energieversor- gung und Informationsspeicherung betreffen. Andere Problemstellungen, und zwar die Schwierig- keit der Entfernung solcher Roboter aus der Natur und die Gefahren welche von einer mögliche Verselbstständigung der Roboterschwärme ausgehen, werden hingegen sehr oft aufgezeigt. Die Urangst des Menschen vor intelligenten Maschinen wird so genutzt um ein Szenario zu entwickeln, welches das Publikum in den Bann zieht. Zusammengefasst bleibt zu sagen, im Darstellen der Möglichkeiten einer Nanowelt ist die Utopie unserer Realität weit voraus und dies führt sicher zu dem ein oder andere Denkanstoss der die reale wissenschaftliche Entwicklung, und somit die Lö- sung der technischen Probleme welche Realität und Utopie momentan noch trennen, vorantreibt. 05.06.2011 5
Mikrosysteme
Fallbeispiel: Nanoroboter, Utopie oder Realität
3 Realität
3.1 Geschichte
Nanotechnologie ist eine sehr junge Technologie. Wissenschaftlicher Vorreiter der Nanotechnolo-
gie war Richard P. Feynman. Er strebte danach, Stoffe in sehr kleinem Massstab zu manipulieren
und zu kontrollieren. Viele Ideen, welche erst heute verwirklicht werden konnten oder immer noch
Utopie sind, beschrieb er bereits im Jahr 1959 in seinem Vortrag “There‟s Plenty of Room at the
Bottom“. Den Begriff Nanotechnologie, auf welcher Nanoroboter basieren, gibt es seit dem Jahr
1974. In diesem Jahr wurde er von dem japanischen Ingenieur Norio Taniguchi zum ersten Mal in
einem wissenschaftlichen Bericht, welcher sich mit Halbleiterprozessen auseinandersetze, ver-
wendet. Sieben Jahre später, 1981, betritt eine Technologie die Bühne, welche es erstmals ermög-
licht Vorgänge im Nanometer Bereich zu beobachten. Gerd Binnig und Heinrich Rohrer erfinden
das Rastertunnelmikroskop. Erstmals sind nun
Aufnahmen im atomaren Bereich, noch präzi-
ser als mit einem Elektronenmikroskop, mög-
lich. Fünf Jahre darauf entwickelt Binning zu-
sammen mit Calvin Quate und Christopher
Gerber das noch genauerer Rasterkraftmikro-
skop. In diesem Jahr erschien auch eines der
bedeutendsten Bücher im Bereich der Nano-
technologie, Eric Drexlers‟s „Engines of creati-
on“. Drei Jahre später, 1989, gelingt dem Phy-
siker Don Eigler schliesslich wovon Feynman
nur träumen konnte. Er setzt unter Zuhilfenah-
me eines Rastertunnelmikroskops den Schrift-
zug „IBM“ aus 35 Xenonatomen zusammen.
Heute ist es nicht nur möglich Stoffe statisch zu
modifizieren, auch komplexe molekulare
Schaltkreise auf Basis von Nanotubes sind nun Abbildung 3-1: IBM aus genau 35 Atomen
realisierbar. 4, 25, 26
3.2 Was ist heute möglich?
Wir befinden uns bereits im Nano-Zeitalter. In Chemiekonzernen wird schon seit Jahren an Ver-
edelungen von Werkstoffen wie beispielsweise Zahnpasta, Sonnencreme, Papier oder Autolacken
geforscht, um eine bessere Performance zu ermöglichen. Nanoroboter wie sie in Filmen und Spie-
le (Kapitel 2.2) dargestellt werden, sind noch nicht in der Realität vorhanden. Jedoch wollen wir
euch in den folgenden Kapiteln zeigen, dass es bereits faszinierende Technologien im Bereich der
Nanoskala gibt, welche zur Entwicklung eines Nanoroboters beitragen können.
3.2.1 Allgemein
Nanoroboter beschäftigen die Menschheit schon seit einigen Jahrzenten. In den letzten paar Jah-
ren konnten einige Fortschritte erzielt werden. Unter dem Begriff Nanoroboter, von welchem Nani-
ten und Nanobots ein Synonym darstellen, versteht man eine enorm kleine autonome Maschine.
Durch den Fortschritt der Technologie konnte die Grösse von solchen Robotern in den letzten Jah-
ren immer stärker minimiert werden
Der Nanoroboter soll einen Roboter im Kleinstformat darstellen. Die kleinsten mechanischen Ro-
boter hatten bis jetzt die Grösse eines Streichholzkopfes. Bei diesen Grössen handelt es sich aber
lediglich um Prototypen, welche noch auf einen viel kleineren Massstab reduziert werden sollen.
25
Vgl. URL: http://www.simplyscience.ch/desktopdefault.aspx/tabid-348/487_read-6774/admin-1/ [Stand: 4.6.2011]
26
Vgl. URL: http://www.lotustech.de/nanogeschichte.html [Stand: 4.6.2011]
05.06.2011 6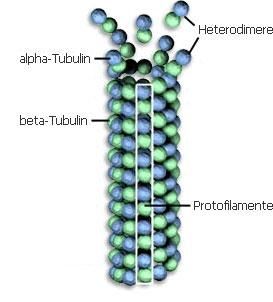
Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität Die Fortbewegung von diesen kleinsten Robotern stellt die Wissenschaft auch heute noch vor ein Problem. Im späteren Teil wird noch auf einige Fortbewegungsmöglichkeiten eingegangen. Als eindeutiges Ziel wird die Grösse von einem roten Blutkörperchen angestrebt, damit die Nanorobo- ter im Blutkreislauf zirkulieren können ohne die Kapillare zu verstopfen. Hier gilt zu beachten, dass ein Erythrozyt sich zusammenpferchen kann, um die die Kapillare zu passieren. Daraus resultiert eine etwas geringere oder flexible Grösse für die Nanoroboter zu Erythrozyten. Die Kapillare besit- zen einen Durchmesser von 5 bis 10 µm.27 Dagegen steht die Grösse von 7,5 µm eines Erythrozy- ten.28 Diese auf minimalen Raum konzipierten Roboter sollen in der Zukunft in der Medizintechnik ange- wendet werden können. Sie können selbstständig im vorwiegend menschlichen Organismus agie- ren und somit dem Medizinpersonal viel Arbeit abnehmen. Dazu könnten Eigenschaften wie die Aufspürung und Eliminierung von Krankheitsherden wie Krebszellen kommen. Somit würde ein weiteres Immunsystem für den Körper geschaffen, welches spezifisch agieren kann. Durch den eingeschränkten Durchmesser der Kapillaren wären im menschlichen Körper auch län- gere eher faserförmige Nanoroboter denkbar, weil es sich mit den Kapillaren annähernd um Mikro- skopisch kleine Röhren handelt. Diese faserförmige Nanoroboter würde somit in den Blutgefässen oder zwischen den Zellen zum Einsatz kommen. Die Nanobots können kontinuierlich einen Wirkstoff am richtigen Wirkort abgeben und dazu gleich noch eine Überwachungsfunktion über Beispielsweise das Gewebe oder die Zellen wahrnehmen. Diese Anwendungsdivision kann man als eine Fortsetzung der minimal-invasiven Chirurgie be- trachten. Es ist anzunehmen, dass die Nanoroboter keinen Schmerz im Körper auslösen sollen 29, 30 3.2.2 Nanowürfel als Extremspeicher Bei Nanoroboter stellt unter anderem die Energieversorgung, die gewährleistet werden muss, ein Problem dar, sofern der Nanoroboter seine Energie nicht selber produzieren kann. Die sogenannten Nanowürfel sind bekannt für ihre Langlebigkeit. Sie haben dank ihrer grossen inneren Oberfläche enorme Speichereigenschaften und können so für mobile Elektrogeräte einge- setzt werden. Zum Vergleich hätten zweieinhalb Gramm dieser Nanowürfel eine äquivalente Flä- che eines Flussballfeldes.31 Durch diese neue Technologie können kleinere Geräte und langanhal- tende Akkus erstellt werden. So können wir uns vorstellen, dass sie in naher Zukunft zum Beispiel bei Mobiltelefon eingesetzt werden können. Wir glauben jedoch, dass der Einsatz der Nanowürfel für Nanoroboter, die in unsere Körper eingesetzt werden soll, nicht ideal wäre, da ein Energiespei- cher im Körper schlecht austauschbar wäre. Daraus resultiert, dass eine Energieselbstversorgung der Nanoroboter angestrebt werden sollte. 3.2.3 Nanogenerator Die Entwicklung von drahtlosen Nanobauteilen und Na- nosystemen hat eine entscheidende Bedeutung in der Erfassung von Medizin, Umwelt, Wehrtechnik und sogar in der Haushaltselektronik. Nicht zuletzt, weil die Systeme dadurch flexibler, mobiler und kostengünstiger werden. Deshalb wäre es wünschenswert, dass die drahtlosen Geräte die benötige Energie selber generieren (self- powered) und so ohne eine Batterie arbeiten können. Es wird deshalb stark im Bereich der Umwandlung von me- chanischer, schwing und hydraulische Energie in elektri- sche Energie bei Nanobauteilen geforscht. Es gibt ein Abbildung 3-2: Nanogenerator 27 Vgl. URL: http://de.wikipedia.org/wiki/Kapillare_%28Anatomie%29 [Stand: 25.04.2011]. 28 Vgl. URL: http://de.wikipedia.org/wiki/Rotes_Blutk%C3%B6rperchen [Stand: 25.04.2011]. 29 Vgl. URL: http://de.wikipedia.org/wiki/Nanobot [Stand: 25.04.2011]. 30 Vgl. URL: http://de.wikipedia.org/wiki/Minimal-invasive_Chirurgie [Stand: 25.04.2011]. 31 Vgl. http://www.faz.net/artikel/C30563/nanotechnologie-der-blick-aufs-unsichtbare-30039368.html [Stand: 28.04.2011] 05.06.2011 7
Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität innovatives Konzept für die Umwandlung nanoskaliger mechanischer Energie in elektrische Ener- gie. Die Schlüsseltechnologie des Konzeptes sind Zinkoxid (ZnO)-Nanodrähte. ZnO-Nanodrähte sind piezoelektrisch und somit in der Lage elektrischen Strom zu erzeugen. Bei nur kleinsten Be- wegungen kann es dazu kommen, dass der Draht sich streckt oder staucht. Die Bewegung der Nanodrähte kann praktisch durch jede Art von Bewegung ausgelöst werden vom Gehen über den Herzschlag bis zum Blutkreislauf. 500 dieser Nanodrähte wären zusammengefasst so dick wie ein menschliches Haar. Um Strom zu erzeugen schliesst man Millionen solcher dünnen Drähte zusammen und bettet sie in einen fla- chen Polymer-Chip zusammen. Fünf Chips sind so gross wie eine Briefmarke und ergeben ein Mikro-Ampere bei drei Volt Spannung. So können kommerzielle LED, Laserdioden und handelsüb- liche Displays mit Energie versorgt werden. Die Forscher arbeiten daran ihre Leistung noch weiter zu steigern und wollen die Nanogeneratoren in einem grösseren Massstab produzieren. So wäre es möglich Nanogeneratoren in die Schuhsole einzubetten und so beim Laufen Strom für mobile Geräte zu erzeugen. Ausserdem wären implantierte Insulinpumpen unabhängig von der manuellen Stromversorgung, weil die Pumpe mit dem Herzschlag angetrieben werden soll. Eben- so könnten Umweltmessdaten mit flatternden Generatoren ausgerüstet werden. Für den Einsatz für Nanorobotern wäre diese Technologie essentiell. So könnten sich die Nanoroboter in den Blut- kapillaren fortbewegen und durch die Blutstrombewegungen ihre eigene Energie produzieren und somit unabhängig von der Aussenwelt einsetzbar sein. Die Problematik der Energieversorgung wäre durch dieses Prinzip gelöst. Doch bei Geräten in Nanogrossen kommen noch weitere unge- löste Probleme hinzu. (Kapitel 3.4) 32, 33 3.2.4 Aktorik Aktorik ist ein Teilgebiet der Antriebskraft und wird im Mikrosystem eingesetzt. Ein grosses Poten- tial für die miniaturisierten Aktoren wird dabei in der Informationstechnik gesehen. Typische Bei- spiele für Mikroaktoren sind miniaturisierte Pumpen im Bereich der Mikrofluidik, Schalter, Verstell Vorrichtungen, Motoren, Drehspiegel und Druckköpfe. Digital Micromirror Device ist eine Anwen- dung, die Kraftwirkung von elektrostatischer Felder nutzt, um die Mikrospielgel zu bewegen. Da sich die Forschung auf diesem Gebiet noch im Anfangsstadium befindet, ist hier ein enormes Po- tential vorhanden. Aktorik setzen elektronische Signale in mechanische Bewegungen oder andere physikalische Grössen um. Neue piezoelektrische Verbundwerkstoffe erlauben die Erfassung und Erzeugung von Bewegungen auf eine neue Art und Weise. Die Bewegungen werden mit einem elektrischen Feld in definierter Polungsrichtung an einem piezoelektrischen Verbundwerkstoff erzeugt. Das Re- sultat ist eine gezielte Verformung. Dabei kann man das Prinzip mit der menschlichen Speiseröhre vergleichen. Die unterschiedlichen Einsatzmöglichkeiten beruhen auf dem sogenannten Skalie- rungsgesetz: Danach nehmen bei elektromagnetischen Antrieben die erzeugbaren Kräfte bei der Reduktion der Bauteilgrösse um den Exponent 4 ab. Genau umgekehrt verhält es sich mit elektro- statischen Antrieben. Diese spielen in der Makrowelt kaum, in der Mikro- oder gar Nanowelt dage- gen eine grosse Rolle. Bei elektrostatischen Antrieben verringern sich die erzeugbaren Kräfte um den Exponent 2 bei der Reduktion der Bauteilgrösse. Bedenkt man, dass durch Reduktion der Bauteilgrösse um den Exponent 1 das Volumen und damit in erster Näherung die Masse des Ak- tors um den Exponent 3 abnimmt, so wird die Bedeutung des elektrostatischen Antrieb für Mikro- aktoren verständlich. 34, 35, 36 32 Vgl. URL: http://winfuture.de/news,62339.html [Stand: 28.04.2011]. 33 Vgl. URL: http://www.sciencedaily.com/releases/2011/03/110329134115.htm [Stand: 28.04.2011]. 34 Vgl. URL: http://de.wikipedia.org/wiki/Aktorik [Stand: 29.04.2011] 35 Vgl: Ulrich Mescheder (2004): S.125 36 Vgl. URL: http://de.wikipedia.org/wiki/Mikrospiegelaktor [Stand: 01.06.2011]. 05.06.2011 8
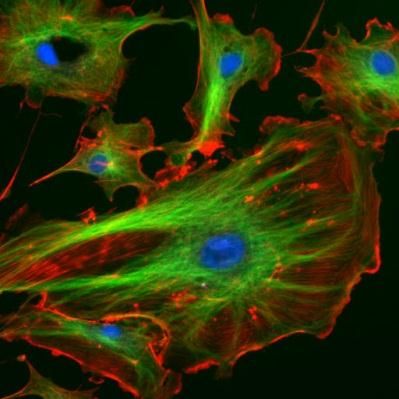
Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität 3.2.5 Mikrotubuli gestützte Nanomaschinen 3.2.5.1 Einführung Da man für die mechanische Umsetzung der Nanorobo- ter auf sehr viele Probleme stösst, sucht man in der Natur nach Lösungen. In den nächsten Kapiteln zeigen wir einige Beispiele im Nanobereich, welche in der Na- tur bzw. Biologie vorkommen und dort bereits einwand- frei funktionieren. Als Schwerpunkt beschäftigen wir uns mit den Proteinen Mikrotubuli. Diese sind auch für die Beweglichkeit von Zellen verantwortlich und ebenso für Transporte innerhalb der Zellen. In der Technik wären sie mit einer Glasfaser vergleichbar. So könnten Nano- roboter die auf dem Prinzip der Mikrotubuli aufbauen, bestimmte Stoffe an einen spezifischen Ort transportie- ren. Eine weitere sehr interessante Idee wäre die Fortbewe- gung der Nanoroboter mit schon vorhandenen Molekü- len in unserem Körper wie z.B. der DNA. (mehr dazu im Kapitel 3.2.6) Abbildung 3-3: Endothelzellen unter dem Mikroskop 3.2.5.2 Mikrotubuli Die Mikrotubuli finden sich im Cytoskelett. Das Cytoskelett stellt ein bewegliches Netz aus Protein- fäden dar. Diese durchziehen die Zellen von Pflanzen, Tieren und Pilzen. Das Cytoskelett in euka- ryotischen Zellen besteht aus drei Teilen, zum einen aus den Mikrofilamente, Intermediärfilamente und Mikrotubuli. In der Abbildung 3-3 sind die Mikrotubuli grün, die Zellkerne blau und die Mikro- filamente rot dargestellt. Die Mikrofilamente bestehen hauptsächlich aus dem Protein Aktin und werden auch als Aktinfila- mente bezeichnet. Ihr Durchmesser beträgt etwa 6 nm. Die Mikrofilamente sind beispielsweise für die Bewegung von Muskeln verantwortlich. Die Intermediärfilamente besitzen eine Grösse von rund 10 nm. Sie vermitteln den Strukturerhalt in eukaryotischen Zellen von Tieren. Als Beispiel kann man die bleibende Geschmei- digkeit unserer Haut nennen. Die Mikrotubuli sind für die Zellteilung zuständig. Dies gilt für pflanzliche und tierische Organismen wie auch für Pilze. Der Durchmesser liegt zwischen 20 bis 30 nm. Sie besitzen eine röhrenförmige Struktur und entsprechen in ihren mechani- schen Eigenschaften derjenigen von Glasfasern. Die Mikro- tubuli sind auch wesentlich für die Beweglichkeit von Zellen verantwortlich, ebenso für Transporte innerhalb der Zellen. Die Mikrotubuli sind aus 13 Protofilamenten aufgebaut. Jedes einzelne Protofilament besteht aus einer Kette von Protein- paaren. Die Proteinpaare sind aus einem Alpha- und Beta- Tubilin aufgebaut. Dieser Sachverhalt wird in der Abbildung 3-4 illustriert. Durch Selbstorganisation können die Mikrotubuli Abbildung 3-4: Mikrotubuli bei einer hohen Konzentration der beiden Proteine spontan entstehen. Die Bildung von Mikrotubuli ist innerhalb einer Zelle jedoch gesteuert. Die Mikrotubuli- organisierten Zentren (MTOC) werden durch die sogenannten Starterproteinkomplexe angestos- sen. In Folge dessen erhält der Mikrotubulus eine Richtung. Am freien Ende wachsen Mikrotubuli, dieses wird als Plusende bezeichnet. Andererseits wird das in den MTOC verankerte Ende als Minusende betitelt. Die Mikrotubuli und Mikrofilamente werden als Skelettelemente bezeichnet, besitzen aber keinen reinen statischen Strukturaufbau. Die beiden Bestanteile des Cytoskelett beinhalten eine dynami- 05.06.2011 9
Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität sche Instabilität und werden kontinuierlich auf- und wieder abgebaut. Daraus resultiert eine hohe Anpassung und Flexibilität der Zellen. 37, 38, 39, 40, 41, 42 3.2.5.3 Mikrotubuli als Transportsysteme Mikrotubuli sind wesentliche Kom- ponente für Transportvorgänge die in der Zelle ablaufen und geben der Zelle einen Teil ihrer Struktur. Die Transporteigenschaft kann man auch mit Schienen für biologische Motoren substituieren. Die biologi- schen Motoren können chemische Energie in mechanische Energie umsetzten, wobei diese entlang der Mikrotubuli wandern. Die Richtung des Mikrotubulus bestimmt die Richtung der Fortbewegung. Dies ist mit einer Einbahnstrasse ver- gleichbar. In der Regel wird zwischen zwei Klassen von solchen Mikrotubulus- Motoren unterschieden. Zum einen bewegen sich die Kinesine grund- Abbildung 3-5: Vesikel auf Mikrotubulus sätzlich in die Richtung des wach- senden Plusendes. Zum anderen bewegen sich die Dyneine in die Gegenrichtung. Diese Motoren können sich relativ zu ihrer Grösse mit einer hohen Geschwindigkeit fortbewegen. Aus diesem Grund werden sie als kraftvolle Nanomaschinen betrachtet. Hervorzuheben wäre an dieser Stelle, dass eine Zelle im Normalfall nur ein Dynein besitzt, im Ge- gensatz dazu aber ein ganzes Repertoire von verschiedenen Kinesinmotoren. Dieses System er- mächtigt die Zelle Frachten in vorgegeben Richtungen zu transportieren. Als eindrucksvollstes Beispiel kann das Zusammenspiel und die Aktivität von Mikrotubuli und Mo- toren bezüglich der Chromosomenverteilung während der Zellteilung genannt werden. Doch nicht nur in der Zellteilung sind die Mikrotubuli in Aktion, sie bewegen unterschiedliche Frachten in der Zelle. Um die Zellen von Pilzen und Pflanzen ist eine Zellwand vorhanden. Aus diesem Grund sind diese Zellen unbeweglich. Ihre Gestalt ist jedoch veränderbar und ist abhängig von der Umwelt. Durch eine flexible Entwicklung wird der Nachteil der Bewegungslosigkeit ausgeglichen. Die Mikrotubuli wird eine wichtige Rolle bei diesen Formänderungen zugeschrieben. Sie transportieren z.B. Zell- wandmaterial an die Wachstumsorte in Zellen. Dieser Prozess wird durch verschiedene Signale gesteuert. Die Kinesine transportieren kleine Bläschen in Nervenzellen entlang dicker Mikrotubulibündel zu den Synapsen. Die kleinen Bläschen sind mit Botenstoffen gefüllt. Diese Neurovesikel gelangen nicht an das Ziel, wenn der Aufbau dieser Mikrotubulibahnen gestört wird. Damit degeneriert die Nervenzelle und führt zur Alzheimer-Krankheit. In der Abbildung 3-5 ist unten ein Mikrotubulus 37 Vgl. URL: http://www.roempp.com/prod/?ID=RD-13-02367 [Stand: 30.04.2011]. 38 Vgl. URL: http://de.wikipedia.org/wiki/Cytoskelett [Stand: 30.04.2011]. 39 Vgl. URL: http://de.wikipedia.org/wiki/Intermedi%C3%A4rfilamente [Stand: 30.04.2011]. 40 Vgl. URL: http://de.wikipedia.org/wiki/Mikrofilamente [Stand: 30.04.2011]. 41 Vgl. Fischer (2010): 218-221. 42 Vgl. URL: http://java-srv1.mpi-cbg.de/publications/getDocument.html?id=8a8182da24bf12ed0124c93b8e590022 [Stand: 10.05.2011]. 05.06.2011 10
Mikrosysteme
Fallbeispiel: Nanoroboter, Utopie oder Realität
ersichtlich. Auf diesem läuft ein Motorprotein, welches wiederum ein Vesikel transportiert. Die Ab-
bildung 3-5 ist ein Ausschnitt aus dem Film Biovision der Harvard Universität. 41, 42
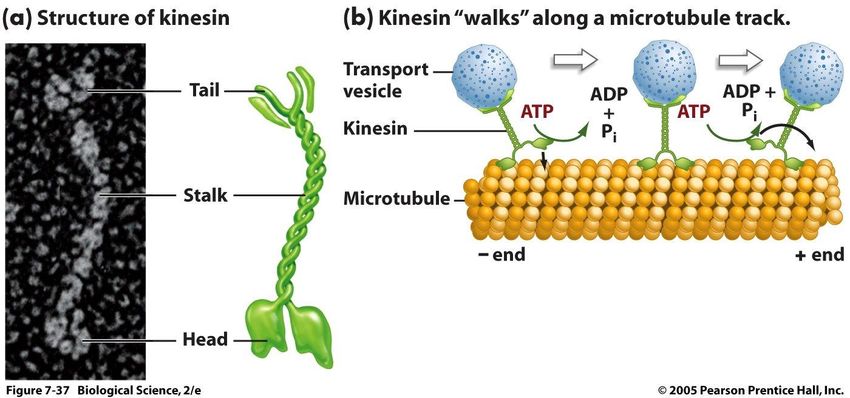
3.2.5.4 Extrazelluläre Anwendung von Mikrotubuli
Die kraftvollen biologischen Motoren sind eine äusserst interessante Möglichkeit Strukturen im
kleinsten Bereich zu Bewegen. Der von Kinesinen benutzte Treibstoff stellt Energiereiches ATP
dar. In der Abbildung 3-6 ist die Funktion des ATP sehr gut ersichtlich. Die Kinesinmotoren konn-
ten isoliert werden und ihre Aktivität wurde ausserhalb der Zelle gemessen und sichtbar gemacht.
Um dies zu erreichen werden die Kinesine auf Glasoberflächen fixiert, anschliessend werden po-
lymerisierte Mikrotubuli dazugeben. Durch die Fixierung von Kinesinmotoren auf einer Glasober-
fläche können die Motoren nicht entlang des Mikrotubulis wandern, stattdessen bewegen die Kine-
sine die Mikrotubuli.
Daraus resultiert eine neue Transportmöglichkeit. Durch die Aktivität der Motoren können Molekü-
le oder eine andere Fracht transportiert werden, wenn sie an die Mikrotubuli gekoppelt sind. Die
Bewegung erfolgt jedoch relativ ungerichtet. Somit kann dieses System noch nicht für einen ge-
richteten Transport verwendet werden. Dieses Problem kann umgangen werden, indem topologi-
sche Vorgaben auf der Oberfläche gemacht werden. Im Material können z.B. Formen von Kinesin-
beschichteten Gräben erreicht werden.
Innerhalb dieser Gräben können die Mikrotubuli aufgrund ihrer starren Struktur die Wände dieser
Gräben nicht erklimmen. Dadurch bewegen sich die Mikrotubuli nur innerhalb ihrer Grabengren-
zen.
In einem nanobiologischen Projekt wurden die zellulären Transportsysteme von Mikrotubuli nach-
gestellt. Die Mikrotubuli-Schienen werden mittels abgewandelter Kinesinmotoren auf einer Ober-
fläche fixiert. Die Motoren wurden so angepasst, dass die Mikrotubuli sich selbst nicht mehr bewe-
gen und sehr fest binden können.
Durch die Spur einer Rasterkraftmikriskiospitze sollen die Kinesinmotoren in dünnster Linie auf die
Oberflächen aufgetragen werden.
Aus einem filamentösem Pilz können Vesikel gewonnen werden. Um die Zelle zu verlängern,
transportieren Pilze tausende von Vesikeln sehr schnell zur Spitze der Zelle. An dieser Stelle ver-
schmelzen die Vesikel mit der Membrane. Durch diesen Prozess wird die Zellwandbiosynthese
ermöglicht, weil der Inhalt der Vesikel entleert wird.
Nachdem die Vesikel aus einem Pilz isoliert wurden, entdeckte die Forschergruppe, dass die Vesi-
kel mit Kinesin verknüpft sind. Diese Vesikel sollen nun als Flüssigkeitstransportbehälter benutzt
werden. Um dies zu erreichen wird ein veränderter Membrankanal in die Vesikelmembran einge-
baut und durch eine Lichtsteuerung soll der Inhalt der Vesikel abgegeben werden. Damit wird der
Transport von kleinsten Flüssigkeitsmengen auf kleinstem Raum ermöglicht.
Es können z.B. zwei Vesikel mit unterschiedlichem Inhalt an einen Ort transportiert werden um in
diesem Bereich eine spezifische Reaktion auszulösen. Durch die Oberflächenspannungen des
Wassers ist es schwierig kleine Flüssigkeitsmengen Mithilfe von miniaturisierten Pumpen zu trans-
portieren, weil das Wasser im kleinsten Massstab hohe Haftkräfte entwickelt. Diese Begrenzungen
der Mikrofluidität können durch das Vesikelsystem umgangen werden. Die mehreren Meter langen
und einige Mikrometer dicken Nervenzellen in dem menschlichen Körper dienen als ideales Bei-
spiel für den Transport von Vesikel.
Für einen Nanoroboter könnte ein Mikrotubuli basiertes Transportsystem realisiert werden. 41, 42, 43
43
Vgl. URL: http://www.uic.edu/classes/bios/bios100/summer2007/lect05.htm [Stand: 30.05.2011].
05.06.2011 11Mikrosysteme
Fallbeispiel: Nanoroboter, Utopie oder Realität
Abbildung 3-6: (a) Struktur von Kinesin und (b) Kinesin wandert entlang eines Mikrotubulus
3.2.5.5 Mikrotubuli als Sensorsysteme
Eine andere Anwendungsdivision von Mikrotubuli wäre der Mechanosensor. Mechanosensoren
sind eine Art Sinnesorgan der Zelle für mechanische Reize.
Sie sind für die Wahrnehmung von Berührungen sowie anderer physikalischer Reize essenziel.
Das menschliche Gehör beruht ebenfalls auf Mechanosensoren, welche die feinen Schwingungen
des Trommelfells in elektrische Signale umwandeln. Jede Zelle wird von steuerbaren Poren in der
Membran umgeben, diese sind der Auslöser für diesen Effekt. Die mechanosensitiven Kanäle öff-
nen sich bei mechanischer Belastung und schliessen nachdem sich die Membrane wieder ent-
spannt hat. Diese Kanäle sind mit dem Cytoskelett verbunden. Wahrscheinlich entsteht dadurch
ein Hebelsystem, welches die diffusen und winzigen Kräfte entlang der Membran aufnimmt und auf
diese Kanäle bündelt. Die Empfindlichkeit dieses Sensors kann theoretisch noch weiter gesteigert
werden.
Die Mechanosensoren sollen auf diffuse und sehr kleine Reize reagieren. Diese Reize besitzen
eine sehr kleine Energie und werden theoretisch durch die zufälligen Molekülbewegungen über-
deckt. Daraus resultiert, dass der Reiz zuerst verstärkt werden muss damit er vom Sensor wahr-
genommen werden kann. Für diese Anwendung bieten sich wiederum die Mikrotubuli an. Sie sind
durch ihre verhältnismässige steife Struktur als Verstärker gut geeignet und können Hebelkräfte
übertragen.
Die Mikrotubuli bauen sich bevorzugt entlang von Kraftlinien auf, weil der Einbau von Tubulin-
Bausteine in den Mikrotubulus auf mechanische Spannungen reagiert. Dadurch entsteht eine
Rückkoppelung, die auch aus kleinen Eingangspitzen relativ grosse Signale erzeugen kann. Bei
berührungsunempfindlichen Mutanten des Fadenwurms Caenorhabditis elegans wurde gezeigt,
dass der Fadenwurm auf einen Kitzelreiz nicht antworten konnte weil die Tubuline von der Mutati-
on Betroffen waren.
Grundsätzlich kann jede Membranpore durch Verformung der Membrane zum Öffnen gezwungen
werden. Die Energien sind aber um ein Vielfaches höher als bei echten mechanosensitiven Kanä-
len. 42, 43, 44
44
Vgl. Fischer (2010): 221-223.
05.06.2011 12Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität 3.2.5.6 Fazit Nanomaschinen welche auf dem biologischen System der Mikrotubuli basieren sind bereits heute Realität, jedoch besteht hier ein riesiges Potential diese weiter auszubauen. Aus diesem Grund wurde dieses Thema in diesem Kapitel sehr genau erörtert. Mithilfe der Mikrotubuli ist es möglich kleinste Teilchen zu bewegen und Sensoren zu verwenden. Das sind bereits zwei sehr wichtige Voraussetzungen für kleinste Roboter. Diese beiden Fähigkeiten müssen nun irgendwie kombiniert werden um bewegungsfähige und sensitive Nanoroboter zu entwickeln. An dieser Stelle zeigt sich wieder, dass die Natur und Evolution bereits eine riesige Entwicklung durchgemacht haben. Es liegt nun an uns Menschen diese Techniken optimal zu nutzen. 3.2.6 Fortbewegung Mithilfe von der DNA 3.2.6.1 Entwicklungsprozess Die DNA besitzt einen kompakten Aufbau. Aus diesem Grund ist sie für die Implantati- on als Bestandteil eines Nanoroboter sehr interessant. Die vier Basen eignen sich her- vorragend um aus DNA-Einzelsträngen viel- fältige geometrische Strukturen zu bauen. Im Jahr 1994 hat Leonard Adleman gezeigt, dass es möglich ist mit unserer DNA zu rechnen. Somit wären Berechnungen nicht nur in Silizium Molekülen, wie in unseren Computer möglich, sondern auch in ande- ren Formen denkbar. Die DNA hat im Ge- gensatz zu den Transistoren vier Grund- bausteine. Das dazu gegründete Forschungsfeld wird DNA-Computings ge- nannt. Über 10 Jahre später wurde vom Caltech-Forscher Paul Rothemund die Erb- moleküle in zwei dimensionalen Landschaf- ten arrangiert unter dem Namen DNA- Abbildung 3-7: Nanoroboter auf präparierter Oberfläche Origami. 45, 46, 47, 48 3.2.6.2 DNA-Walker Rothemund produzierte im Nanobereich Smileys um eine grössere Medienwirksamkeit zu errei- chen. Mit Hilfe von neusten Technologien kann man eine Form aus DNA nach Belieben erzeugen. Als weitere Entwicklung wurden sogenannte DNA-Walker hergestellt. Diese konnten sich mit Hilfe von chemischer Energie auf DNA-Beinen fortbewegen. Ein grosses Problem stellt im Nanobereich die Speicherung von Daten dar. Ein herkömmliches elektronisches Speichermedium wäre grösser als der DNA-Walker selbst. Die beiden erwähnten Forschungen (DNA-Origami und DNA-Walker) können anschliessend zu intelligenten Landschaften kombiniert werden. Somit wird die Umwelt zum Speichermedium. Die verschmolzenen Technologien stellen somit eine Art Nanoroboter dar. 45 Vgl. URL: http://science.orf.at/stories/1647609/ [Stand: 05.05.2011]. 46 Vgl. URL: http://www.heise.de/tr/artikel/Assembler-0-1-1002644.html [Stand: 05.05.2011]. 47 Vgl. URL: http://physicsview.com/Phy/leadArticle.do?laid=12936 [Stand: 05.05.2011]. 48 Vgl. URL: http://www.wissenschaft-aktuell.de/artikel/Nanospinne_mit_Erbgut_Beinen1771015586841.html [Stand: 05.05.2011]. 05.06.2011 13
Mikrosysteme
Fallbeispiel: Nanoroboter, Utopie oder Realität
Der Nanoroboter besteht aus vier Beinen an einem Streptavidin Proteinmolekül. Drei Beine sind für
das Marschieren zuständig und das andere dient als Anker. Die Richtung wird durch die Land-
schaft vorgegeben. Somit kann man durch Veränderung der intelligenten Landschaft verschiedene
Richtungen anstreben. Das DNA-Origami von Rothemund wurde darauf weiterentwickelt. Damit
können verschiedene Befehle erteilt werden. Die Fortbewegung kommt
durch die Anlagerung von den DNA-Beinen an lose Enden von einzelnen
DNA-Strängen zustande, wenn sich ihre Basenfolgen entsprechen. Die
DNA-Stränge ragen wie Pfosten empor. Der Antrieb basiert auf der Nut-
zung von der DNA-Hybridisierung. Diese Methode der Fortbewegung ist
als Fortschritt zu betrachten, weil damit grössere Distanzen zurückgelegt
werden können als in früheren Versuchen.
In der Abbildung 3-7 wird ein Nanoroboter mit Beinen aus DNA-Strängen
veranschaulicht. Der Nanoroboter kann sich auf der mit Erbgutsequenzen
präparierten Oberfläche fortbewegen. 45, 46, 47, 48
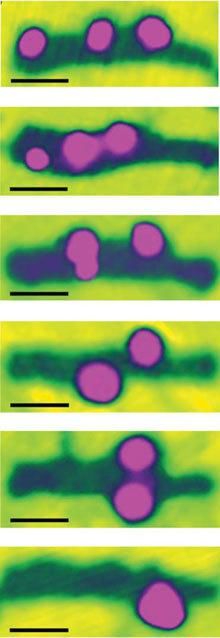
3.2.6.3 Nanoroboter transportieren Lasten
Nadrian Seeman entwickelte einen Nanoroboter der sich durch eine dau-
erhafte Versorgung von DNA-Strängen fortbewegt.
Diese Nanomaschine besitzt vier Beine und drei Arme aus DNA. Die Arme
können kleinste Lasten aufnehmen, transportieren und wieder abgeben.
Anscheinend ist es dem Nanoforscher mit diesem Nanoroboter gelungen
Goldpartikel zu befördern. In der Abbildung 3-8 wird dieser Sachverhalt
durch eine Kraftmikroskop-Aufnahme eindrücklich illustriert. Die Goldna-
nopartikel werden von dem aus DNA bestehenden Nanoroboter über ei-
nen vorbestimmten Pfad transportiert. Im Gegensatz zu dem oben ge-
nannten DNA-Walker Konzept entsteht die Bewegung also durch das Hin-
zufügen von kurzen DNA-Strängen. Diese verbinden die Pfosten und Bei-
ne miteinander oder werden wieder voneinander gelöst.
Konkreter bedeutet, dass das sich chemisch Depots Programmieren las-
sen könnten, welche Teilchen nur an bestimmte vorbeilaufende Nano-
Transporter weiterreichen können. Durch ein solches System könnte es in
Abbildung 3-8: DNA-Roboter
der Zukunft möglich sein, molekulare Schaltkreise zusammen zu bauen. 45,
46, 47, 48
05.06.2011 14Mikrosysteme Fallbeispiel: Nanoroboter, Utopie oder Realität 3.3 Zukunft Die Nanotechnologie hat ein grosses Potential in der Zukunft. So hat die EMPA und die ETH Zü- rich für 90 Millionen ein neues Forschungszentrum für Nanotechnologie in Rüschlikon eröffnet. 49 Dies zeigt, dass die Schweiz das Potential weiterhin für sehr gross hält und führend in der Nano- technologie bleiben will. 3.3.1 Respirocyten Unter Respirocyt wird ein mechanisches rotes Blut- körperchen verstanden, welches heute noch in den Kinderschuhen steckt. Es wird damit gerechnet dass diese Nanomaschine um das Jahr 2020 einsatzfähig sein wird. Die Abbildung 3-9 illustriert ein mögliches Aussehen des Respirocyts. Dieser Nanorobotertyp folgt dem Fluss und Verlauf der Blutbahn. Der Aufbau von dem Respirocyt lehnt sich an einer Kohlenstoffatomschale an, welche eine steife Diamantstruktur besitzt. Die komplette Struktur ist Kugelförmig und kann mit Sauerstoff und Koh- lendioxid gefüllt werden. Der grosse Vorteil an Re- spirocyten liegt an ihrer Druckfestigkeit und thermi- schen Stabilität. Zusätzlich soll es möglich sein die Sauerstoffregulation über Sensoren zu steuern. Durch die hohe Druckfestigkeit wird Vorausgesagt, Abbildung 3-9: Respirocyt dass ein Respirocyt über 200 Mal mehr Sauerstoff zu den Zellen bringen soll als ein normales biologisches rotes Blutkörperchen. 50, 51 3.4 Problemstellungen der Nanotechnologie Langfristig wird eine grosse Auswirkung von Nanotechnologie auf die Bevölkerung erwartet. Doch es herrscht auch ein grosses Unwissen über Selbige. Nanopartikel die bei der Verarbeitung von Nanowerkstoffen entstehen können ungeahnte Gefahren Darstellen. Sie könnten durch Einatmen in Lunge und Blutbahn gelangen und so leicht in Zellen allenfalls auch in den Zellkern eindringen. Im Bereich der Nanotechnologie wirken die Gesetzmässigkeiten der Physik in anderen Verhältnis- sen. Auch der Einfluss von quantenphysikalischen Phänomenen muss bei Objekten dieser Grös- senordnung immer miteingerechnet werden. 52 3.4.1 Informationsspeicher Ein weniger angesprochenes Problem in der Nanotechnologie bzw. bei den Nanoroboter ist der Informationsspeicher. Dieser müssen auch in der Nanogrösse hergestellt werden, damit der Nano- roboter ständig Zugriffsbereit ist und die Möglichkeit besitzt Informationen zu erhalten. Durch die grosse Menge von Informationen wächst auch der Speicherplatz. Ein hervorragender Informati- onsspeicher wäre z.B. die DNA. Natürlich hat sich der Informationsspeicher in den Jahren enorm verbessert. (Hohe Speicherdichte, geringer Stromverbrauch, niedrige Kosten) So wurden früher Daten in Lochkarten im Abstand von einigen Millimeter gespeichert, lassen sich heute eine Spei- cherdichte von bis zu 78 Gigabit/cm2 erreichen. Bei der Datenspeicherung auf Festplatten konnte zuletzt bei der Nutzung eines Riesenmagnetwiderstands (GMR: Giant Magneto Resistance) gros- 49 Vgl. URL: http://www.suche.sf.tv/?q=nano&s=Suchen&WT.zugang=front_hea [Stand: 06.05.2011]. 50 Schulz (2009): 379. 51 Vgl. URL: http://www.azonano.com/article.aspx?ArticleID=2035&lang=de#_Respirocyte_-_An_Artificial%20Oxygen [Stand: 10.05.2011]. 52 Vgl. URL www.mic-net.de/nano/downloads/FN_Tipps.pdf [Stand 10.05.2011] 05.06.2011 15
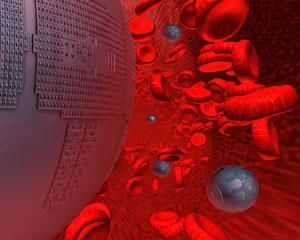
Sie können auch lesen