Messgeräte für elektrische Antriebe - Heidenhain
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Messgeräte für elektrische Antriebe 11/2021

Inhalt
Die in diesem Prospekt aufgeführten Prospekt Produktübersicht Übersicht
Messgeräte stellen keine Übersicht des Drehgeber Drehgeber für die
HEIDENHAIN-Lieferprogramms dar. Viel Aufzugsindustrie Erläuterungen zu den Auswahltabellen 6
mehr bietet der Prospekt eine Auswahl der
Messgeräte für den Einsatz an elek Drehgeber Produktübersicht
Drehgeber für die
Drehgeber zum Einbau in Motoren 8
trischen Antrieben.
Aufzugsindustrie
Drehgeber zum Anbau an Motoren 12
In den Auswahltabellen finden Sie eine 11/2020 06/2020 Winkelmessgeräte für Einbau- und Hohlwellenmotoren 18
Übersicht aller HEIDENHAIN-Messgeräte
für den Einsatz an elektrischen Antrieben Offene Längenmessgeräte für Linearantriebe 20
mit den dafür wichtigen Technischen Daten.
Die Beschreibungen der technischen Eigen Prospekt Prospekt
Gekapselte Längenmessgeräte für Linearantriebe 22
schaften enthalten grundlegende Informa- Winkelmessgeräte Modulare Technische Eigenschaften und Anbauhinweise
tionen über den Einsatz von Drehgebern, mit Eigenlagerung Winkelmessgeräte
Winkel- und Längenmessgeräten an elek mit magnetischer Drehgeber und Winkelmessgeräte für Drehstrom- und Gleichstrommotoren 24
trischen Antrieben. Abtastung HMC 2 und HMC 6 – Die Ein-Kabel-Lösungen für Antriebe 26
Winkelmessgeräte Modulare
mit Eigenlagerung Winkelmessgeräte
mit magnetischer
Abtastung
Die Anbauhinweise und die detaillierten Sicherheitsbezogene Positionsmesssysteme 28
Technischen Daten beziehen sich auf die
30
05/2021
Messprinzipien
08/2019
speziell für die Antriebstechnik entwickelten
Drehgeber. Weitere Drehgeber finden
Sie in der entsprechenden Produktdoku-
Messgenauigkeit 33
mentation. Prospekt Prospekt Mechanische Geräteausführungen und Anbau 36
Modulare Offene
Winkelmessgeräte Längenmessgeräte Allgemeine Hinweise 46
mit optischer Abtastung
Modulare
Allgemeine mechanische Hinweise 47
Weitere Informationen:
Offene
Winkelmessgeräte Längenmessgeräte
mit optischer
Technische Daten
Abtastung
Für die ebenfalls in den Auswahltabellen
aufgeführten Längen- und Winkelmess 09/2017
05/2021
Drehgeber mit Baureihe ECN/EQN 1100 54
geräte finden Sie die Detailbeschreibun- Eigenlagerung
gen, wie Anbauhinweise, Technische
ERN 1023 56
Daten und Abmessungen, in der jeweili- ERN 1123 58
gen Produktdokumentation. Prospekt Prospekt
Längenmessgeräte Kabel und Baureihe ECN/EQN 1300 60
für gesteuerte Steckverbinder
Werkzeugmaschinen
Baureihe ECN/EQN 1300 S (DRIVE CLiQ) 62
Längenmessgeräte
für gesteuerte
Werkzeugmaschinen
Kabel und
Steckverbinder Baureihe ECN/EQN 400 64
Baureihe ERN 1300 66
Drehgeber ohne Baureihe ECI/EBI/EQI 1100 68
06/2019 04/2021
Eigenlagerung
Baureihe ECI/EBI/EQI 1300 74
Prospekt Baureihe ECI/EBI 100 80
Schnittstellen
von HEIDENHAIN- ECI 4010, EBI 4010, ECI 4090 S 82
Messgeräten – mit Hohlwelle ¬ 90 mm
Schnittstellen
– mit Hohlwelle ¬ 180 mm
von HEIDENHAIN-
Messgeräten
Baureihe ERO 1200 86
02/2021
Baureihe ERO 1400 88
Elektrischer Anschluss
Schnittstellen 90
Mit Erscheinen dieses Prospekts verlieren Steckverbinder und Kabel 104
alle vorherigen Ausgaben ihre Gültigkeit.
Für die Bestellung bei HEIDENHAIN ist
Diagnose, Prüf- und Testgeräte 108
immer die zum Vertragsabschluss aktuelle
Weitere Informationen:
Fassung des Prospekts und der Produkt
Ausführliche Beschreibungen zu allen dokumentation maßgebend.
verfügbaren Schnittstellen sowie all
gemeine elektrische Hinweise finden Normen (EN, ISO, etc.) gelten nur, wenn
Sie im Prospekt Schnittstellen von sie ausdrücklich im Prospekt aufgeführt
HEIDENHAIN-Messgeräten. sind.
Messgeräte für elektrische Antriebe
Regeleinrichtungen für elektrische Antriebe Die Eigenschaften des Messgeräts haben Alle in diesem Prospekt aufgeführten
benötigen Messgeräte, die für den Lage- maßgeblichen Einfluss auf wichtige Eigen- HEIDENHAIN-Messgeräte zeichnen sich
und Drehzahlregler, sowie zur elektro schaften des Antriebs wie: dadurch aus, dass der Aufwand des An-
nischen Kommutierung, Messgrößen • Positioniergenauigkeit triebsherstellers für die Montage und Ver-
zur Verfügung stellen. • Gleichlaufverhalten drahtung minimiert ist. Die Baulänge bei
• Bandbreite und damit Führungs- und rotatorischen Motoren lässt sich kurz hal-
Störverhalten des Antriebs ten. Selbst auf Sicherheitseinrichtungen
• Verlustleistung wie z. B. Endschalter kann durch den spezi-
• Baugröße ellen Aufbau einiger Messgeräte verzichtet
• Geräuschentwicklung werden.
• Sicherheit
Motor für „digitale“ Antriebssysteme
Digitale Lage- und Drehzahlregelung (digitale Lage- und Drehzahlregelung)
Drehgeber (Positions-Istwert,
Drehzahl-Istwert,
Kommutierungs-Signal,
elektronisches Typenschild)
ϕi
ii
Drehzahl
berechnung
ni is
ϕs ns Drehzahl
Lageregler Entkopplung Stromregler Umrichter Drehgeber
regler
HEIDENHAIN bietet sowohl für rotatori-
sche Motoren als auch für Linearmotoren
in unterschiedlichen Anwendungen jeweils
eine angepasste Lösung:
Winkelmessgeräte
Längenmessgeräte
• Absolute Drehgeber und inkrementale
Drehgeber mit und ohne Kommu
tierungsspuren
• Absolute und inkrementale
Winkelmessgeräte
• Absolute und inkrementale
Längenmessgeräte
• Absolute und inkrementale
Einbaumessgeräte
Drehgeber
4 5
Erläuterungen zu den Auswahltabellen
Die für die jeweiligen Motorbauformen geeigneten Messgeräte
sind in den folgenden Auswahltabellen aufgeführt. Innerhalb der
einzelnen Tabellen stehen Messgeräte mit unterschiedlichen Ab-
messungen und Ausgangssignalen für die verschiedenen Motor
arten (Gleichstrom- oder Drehstrommotoren) zur Auswahl.
Drehgeber zum Anbau an Motoren Drehgeber, Einbaumessgeräte und Winkelmessgeräte für
Drehgeber für Motoren mit Fremdbelüftung werden entweder an Einbaumotoren und Hohlwellenmotoren
das Motorgehäuse an- oder in das Motorgehäuse eingebaut. So Drehgeber und Winkelmessgeräte für diese Motoren verfügen
sind diese Drehgeber häufig dem verunreinigten Kühlluftstrom des über durchgehende Hohlwellen, um z. B. Versorgungsleitungen
Motors ausgesetzt und müssen daher eine hohe Schutzart von durch die Hohlwelle des Motors – und damit auch durch das
IP64 oder mehr aufweisen. Die zulässige Arbeitstemperatur er- Messgerät – führen zu können. Die Messgeräte weisen je nach
reicht selten mehr als 100 °C. Einsatzbedingungen eine hohe Schutzart bis IP66 auf oder müs-
sen – wie z. B. Einbaumessgeräte mit optischem Abtastprinzip –
In der Auswahltabelle finden Sie: durch die Maschinenkonstruktion vor Verschmutzung geschützt
• Drehgeber mit angebauter Statorkupplung hoher Eigenfre- werden.
quenz – die Bandbreite des Antriebs wird praktisch nicht begrenzt
• Drehgeber für separate Wellenkupplungen, die sich besonders In der Auswahltabelle finden Sie:
für den elektrisch isolierten Anbau eignen • Messgeräte mit absoluten und/oder inkrementalen Aus
• Absolute Drehgeber mit rein digitaler Datenübertragung oder gangssignalen hoher Signalgüte
zusätzlichen sinusförmigen TTL- oder HTL-Inkrementalsignalen • Winkel- und Einbaumessgeräte mit der Maßverkörperung auf
• Inkrementale Drehgeber mit sinusförmigen Ausgangssignalen Aluminium- oder Stahltrommeln für Drehzahlen bis 42 000 min–1
hoher Signalgüte für digitale Drehzahlregelung • Eigengelagerte Messgeräte mit Statorkupplung oder Einbau-
• Inkrementale Drehgeber mit TTL- oder HTL-kompatiblen Aus Versionen
gangssignalen • Messgeräte mit gutem Beschleunigungsverhalten für hohe
• Hinweise auf Drehgeber, die unter der Bezeichnung Functional Bandbreiten im Regelkreis
Safety als sicherheitsgerichtete Positionsmesssysteme lieferbar
sind Auswahltabelle siehe Seite 18
Auswahltabelle siehe Seite 12
Drehgeber zum Einbau in Motoren Längenmessgeräte für Linearmotoren
Bei Motoren ohne Fremdbelüftung ist der Drehgeber in das Motor- Längenmessgeräte an Linearmotoren liefern den Istwert sowohl
gehäuse eingebaut. An die Schutzart des Drehgebers werden für den Lageregler als auch den Geschwindigkeitsregler. Sie haben
daher keine hohen Anforderungen gestellt. Allerdings treten inner- maßgeblichen Einfluss auf die Regelungseigenschaften des Linear
halb des Motorgehäuses hohe Arbeitstemperaturen von 100 °C antriebs. Die für diesen Einsatz empfohlenen Längenmessgeräte:
und mehr auf. • Geringe Positionsabweichungen bei Beschleunigung in Mess-
richtung
In der Auswahltabelle finden Sie: • Unempfindlich gegenüber Beschleunigung bzw. Vibration in
• Absolute Drehgeber für Arbeitstemperaturen bis 115 °C, Querrichtung
inkrementale Drehgeber für Arbeitstemperaturen bis 120 °C • Für hohe Geschwindigkeiten ausgelegt
• Drehgeber mit angebauter Statorkupplung hoher Eigen • Absolute Positionsinformationen bei rein digitaler Datenübertra-
frequenz – die Bandbreite des Antriebs wird praktisch nicht gung oder sinusförmige Inkrementalsignale hoher Signalgüte
begrenzt
• Absolute Drehgeber mit rein digitaler Datenübertragung – Offene Längenmessgeräte zeichnen sich aus durch:
geeignet für die Ein-Kabel-Lösungen HMC 6 und HMC 2 – oder • Höhere Genauigkeiten
zusätzlichen sinusförmigen Inkrementalsignalen • Höhere Verfahrgeschwindigkeiten
• Inkrementale Drehgeber für digitale Drehzahlregelung mit • Berührungslose Abtastung, d. h. keine Reibung zwischen
sinusförmigen Ausgangssignalen hoher Signalgüte – auch bei Abtastkopf und Maßstab
hohen Arbeitstemperaturen Offene Längenmessgeräte eignen sich für „saubere“ Umgebungs-
• Inkrementale Drehgeber mit zusätzlichem Kommutierungs bedingungen wie z. B. an Messmaschinen oder Produktions
signal für BLDC-Motoren einrichtungen der Halbleiterindustrie.
• Inkrementale Drehgeber mit TTL-kompatiblen Ausgangs
signalen Auswahltabelle siehe Seite 20
• Hinweise auf Drehgeber, die unter der Bezeichnung Functional
Safety als sicherheitsgerichtete Positionsmesssysteme lieferbar Gekapselte Längenmessgeräte zeichnen sich aus durch:
sind • Hohe Schutzart
• Einfache Montage
Auswahltabelle siehe Seite 8 Gekapselte Längenmessgeräte eignen sich daher für Anwendungen
in verschmutzter Umgebung wie z. B. an Werkzeugmaschinen.
Auswahltabelle siehe Seite 22
6 7
Auswahlhilfe
Drehgeber zum Einbau in Motoren
Schutzart: bis IP40 (EN 60529)
Baureihe Hauptabmessungen Mechanisch Eigenfrequenz Maximale Versorgungs Signalperioden Positionen pro Unterscheidbare Schnittstelle Typ Weitere
zulässige der Ankopplung Arbeits spannung pro Umdrehung Umdrehung Umdrehungen Informa
Drehzahl fE (typisch) temperatur tionen
Drehgeber ohne Eigenlagerung
–1
ECI/EQI 1100 15 000 min / – 110 °C DC 3,6 V bis 14 V – 524 288 (19 bit) –/4096 EnDat 2.2/22 ECI 11191)/EQI 11311) Seite 68
12 000 min–1
DC 4 V bis 14 V EnDat 3/E30-R2
ECI/EQI 1100 DC 3,6 V bis 14 V EnDat 2.2/22
36.83
mit Synchroflansch
22.25
3)
ECI/EBI 1100 115 °C 262 144 (18 bit) –/65 536 ECI 1118/EBI 1135 Seite 72
–1
ECI/EBI/EQI 1300 15 000 min / – 115 °C DC 3,6 V bis 14 V – 524 288 (19 bit) –/65 536/40963) EnDat 2.2/22 ECI 13191)/EBI 13351)3)/ Seite 74
12 000 min–1 EQI 13311)
DC 4 V bis 14 V –/4096 EnDat 3/E30-R2 ECI 13191)/EQI 13311) Seite 76
100 °C DC 10 V bis 28,8 V DRIVE-CLiQ ECI 1319 S/EQI 1331 S1) Seite 78
ECI/EBI 100 6000 min–1 – 115 °C DC 3,6 V bis 14 V 32 524 288 (19 bit) – EnDat 2.1/01 mit » 1 VSS ECI 119 Seite 80
– –/65 5363) EnDat 2.2/22 ECI 119/EBI 135
D: 30/38/50 mm
ECI/EBI 4000 6000 min–1 – 115 °C DC 3,6 V bis 14 V – 1 048 576 (20 bit) –/65 5363) EnDat 2.2/22 ECI 40101)/ Seite 82
EBI 40103)
100 °C DC 10 V bis 28,8 V – DRIVE-CLiQ ECI 4090 S1)
D: 90/180 mm
–1
ERO 1200 25 000 min – 100 °C DC 5 V ±0,5 V 1024/2048 – « TTL ERO 1225 Seite 86
» 1 VSS ERO 1285
ERO 1400 30 000 min–1 – 70 °C DC 5 V ±0,5 V 512/1000/1024 – « TTL ERO 1420 Seite 88
DC 5 V ±0,25 V 5000 bis 37 5002) « TTL ERO 1470
DC 5 V ±0,5 V 512/1000/1024 » 1 VSS ERO 1480
1)
Auch mit Functional Safety verfügbar
2)
Nach interner 5/10/20/25fach Interpolation
3)
Multiturn-Funktion über batteriegepufferten Umdrehungszähler
DRIVE-CLiQ ist eine geschützte Marke der Siemens AG.
8 9
Baureihe Hauptabmessungen Mechanisch Eigenfrequenz Maximale Versorgungs Signalperioden Positionen pro Unterscheidbare Schnittstelle Typ Weitere
zulässige der Ankopplung Arbeits spannung pro Umdrehung Umdrehung Umdrehungen Informa
Drehzahl fE (typisch) temperatur tionen
Drehgeber mit Eigenlagerung und angebauter Statorankopplung
ECN/EQN/ 12 000 min–1 1000 Hz 115 °C DC 3,6 V bis 14 V 512 8192 (13 bit) –/4096 EnDat 2.2/01 mit » 1 VSS ECN 1113/EQN 1125 Seite 54
ERN 1100
95 °C DC 10 V bis 28,8 V – 8 388 608 (23 bit) –/4096 DRIVE-CLiQ ECN 1123 S/EQN 1135 S
115 °C DC 3,6 V bis 14 V EnDat 2.2/22 ECN 11231)/EQN 11351)
6 000 min–1 1600 Hz 90 °C DC 5 V ±0,5 V 500 bis 8192 3 Blockkommutierungssignale « TTL ERN 1123 Seite 58
–1
ECN/EQN/ 15 000 min / 1800 Hz 115 °C DC 3,6 V bis 14 V 512/2048 8192 (13 bit) –/4096 EnDat 2.2/01 mit » 1 VSS ECN 1313/EQN 1325 Seite 60
ERN 1300 12 000 min–1
– 33 554 432 (25 bit) EnDat 2.2/22 ECN 13251)/EQN 13371)
(nicht bei ERN)
DC 4 V bis 14 V EnDat 3/E30-R2 Produkt
information
15 000 min–1 120 °C DC 5 V ±0,5 V 1024/2048/4096 – « TTL ERN 1321 Seite 66
ERN 1381/4096:
80 °C 3 Blockkommutierungssignale ERN 1326
512/2048/4096 – » 1 VSS ERN 1381
DC 5 V ±0,25 V 2048 Z1-Spur für Sinuskommutierung ERN 1387
100 °C DC 10 V bis 28,8 V – 16 777 216 (24 bit) –/4096 DRIVE-CLiQ ECN 1324 S/EQN 1336 S Seite 62
1)
Auch mit Functional Safety verfügbar
DRIVE-CLiQ ist eine geschützte Marke der Siemens AG.
10 11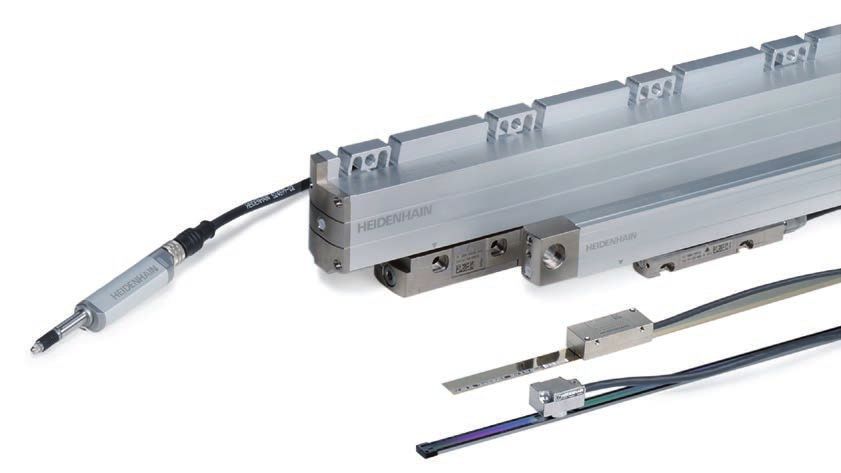
Drehgeber zum Anbau an Motoren
Schutzart: bis IP64 (EN 60529)
Baureihe Hauptabmessungen Mechanisch Eigenfrequenz Maximale Versorgungs Signalperioden Positionen Unterscheidbare Schnittstelle Typ Weitere
zulässige der Ankopplung Arbeits spannung pro Umdrehung pro Umdrehung Umdrehungen Informa
Drehzahl fE (typisch) temperatur tionen
Drehgeber mit Eigenlagerung und angebauter Statorankopplung
ECN/ERN 100 ¬ 30 mm: 1000 Hz 100 °C DC 3,6 V bis 14 V 2048 8192 (13 bit) – EnDat 2.2/01 mit » 1 VSS ECN 113 Prospekt
–1
6000 min Drehgeber
– 33 554 432 (25 bit) EnDat 2.2/22 ECN 125
¬ > 30 mm:
4000 min–1 DC 5 V ±0,5 V 1000 bis 5000 – « TTL/» 1 VSS ERN 120/ERN 180
85 °C DC 10 V bis 30 V « HTL ERN 130
ECN/EQN/ERN 400 Statorankopplung für Planflächen 6000 min–1 Statorkupplung 100 °C DC 3,6 V bis 14 V 512/2048 8192 (13 bit) –/4096 EnDat 2.2/01 » 1 VSS ECN 413/EQN 425
für Planflächen:
mit 2 Wellen 1500 Hz – 33 554 432 (25 bit) EnDat 2.2/22 ECN 425/EQN 4371)
klemmungen universelle
(nur bei durch Statorkupplung: DC 4,75 V bis 30 V 512 8192 (13 bit) SSI ECN 413/EQN 425
gehender 1400 Hz
universelle Statorankopplung Hohlwelle): DC 5 V ±0,5 V 250 bis 5000 – « TTL ERN 420
12 000 min–1
DC 10 V bis 30 V « HTL ERN 430
70 °C « TTL ERN 460
100 °C DC 5 V ±0,5 V 1000 bis 5000 » 1 VSS ERN 480
ECN/EQN/ERN 400 Statorankopplung für Planflächen 6000 min–1 Statorkupplung 100 °C DC 10 V bis 30 V 256 bis 2048 8192 (13 bit) –/4096 EnDat H HTL EQN 425 Prospekt
für Planflächen: SSI 41H HTL Drehgeber
mit 2 Wellen 1500 Hz
klemmungen universelle DC 4,75 V bis 30 V 512 bis 4096 EnDat T TTL
(nur bei durch Statorkupplung: SSI 41T TTL
gehender 1400 Hz
Hohlwelle): DC 3,6 V bis 14 V – Þi: 33 554 432 4096 Fanuc ECN 425 F/EQN 437 F
12 000 min–1 (25 bit)
DC 10 V bis 28,8 V 16 777 216 (24 bit) DRIVE-CLiQ ECN 424 S/EQN 436 S1)
–1
ECN/EQN/ERN 400 Spreizringkupplung 15 000 min / Spreizring 100 °C DC 3,6 V bis 14 V 2048 8192 (13 bit) –/4096 EnDat 2.2/01 mit » 1 VSS ECN 413/EQN 425 Seite 64
12 000 min–1 kupplung:
1800 Hz – 33 554 432 (25 bit) EnDat 2.2/22 ECN 4251)/EQN 4371)
Planflächen
15 000 min–1 kupplung: DC 5 V ±0,5 V 1024 bis 5000 – « TTL ERN 421 Produkt
400 Hz information
(nicht bei ERN) DC 5 V ±0,25 V 2048 Z1-Spur für Sinuskommutierung » 1 VSS ERN 487
Planflächenkupplung
83.2
50.5
22
1)
Auch mit Functional Safety verfügbar
DRIVE-CLiQ ist eine geschützte Marke der Siemens AG.
12 13
Drehgeber zum Anbau an Motoren
Schutzart: bis IP64 (EN 60529)
Baureihe Hauptabmessungen Mechanisch Eigenfrequenz Maximale Versorgungs Signalperioden Positionen Unterscheidbare Schnittstelle Typ Weitere
zulässige der Ankopplung Arbeits spannung pro Umdrehung pro Umdrehung Umdrehungen Informa
Drehzahl fE (typisch) temperatur tionen
Drehgeber mit Eigenlagerung und angebauter Statorankopplung
–1
ECN/EQN/ERN 1000 12 000 min 1500 Hz 100 °C DC 3,6 V bis 14 V 512 8192 (13 bit) –/4096 EnDat 2.2/01 mit » 1 VSS ECN 1013/EQN 1025 Prospekt
Drehgeber
– 8 388 608 (23 bit) EnDat 2.2/22 ECN 1023/EQN 1035
95 °C DC 10 V bis 28,8 V DRIVE-CLiQ ECN 1023 S/EQN 1035 S
ERN 1023
DC 5 V ±0,5 V 100 bis 3600 – « TTL/» 1 VSS ERN 1020/ERN 1080
70 °C DC 10 V bis 30 V « HTLs ERN 1030
DC 5 V ±0,25 V 5000 bis 36 0001) « TTL ERN 1070
6000 min–1 1600 Hz 90 °C DC 5 V ±0,5 V 500 bis 8192 3 Blockkommutierungssignale « TTL ERN 1023 Seite 56
1)
Nach interner 5/10/20/25fach Interpolation
14 15
Drehgeber zum Anbau an Motoren
Schutzart: bis IP64 (EN 60529)
Baureihe Hauptabmessungen Mechanisch Eigenfrequenz Maximale Versorgungs Signalperioden Positionen Unterscheidbare Schnittstelle Typ Weitere
zulässige der Ankopplung Arbeits spannung pro Umdrehung pro Umdrehung Umdrehungen Informa
Drehzahl fE (typisch) temperatur tionen
Drehgeber mit Eigenlagerung für separate Wellenkupplung
–1
ROC/ROQ/ROD 400 Synchroflansch 12 000 min – 100 °C DC 3,6 V bis 14 V 512/2048 8192 (13 bit) –/4096 EnDat 2.2/01 mit » 1 VSS ROC 413/ROQ 425 Prospekt
Drehgeber
– 33 554 432 (25 bit) EnDat 2.2/22 ROC 4251)/ROQ 4371)
DC 4,75 V bis 30 V 512 8192 (13 bit) SSI ROC 413/ROQ 425
Klemmflansch
DC 10 V bis 30 V 256 bis 2048 8192 (13 bit) –/4096 EnDat H HTL ROQ 4253)
SSI 41H HTL
DC 4,75 V bis 30 V 512 bis 4096 EnDat T TTL
SSI 41T TTL
DC 3,6 V bis 14 V – Þi: 33 554 432 4096 Fanuc ROC 425 F/ROQ 437 F
(25 bit)
DC 10 V bis 28,8 V 16 777 216 (24 bit) DRIVE-CLiQ ROC 424 S/EQN 436 S1)
DC 5 V ±0,5 V 50 bis 10 0002) – – « TTL ROD 426/ROD 420
DC 10 V bis 30 V 50 bis 5000 « HTL ROD 436/ROD 430
70 °C 50 bis 10 0002) « TTL ROD 466
100 °C DC 5 V ±0,5 V 1000 bis 5000 » 1 VSS ROD 486/ROD 480
ROC/ROQ/ROD 1000 12 000 min–1 – 100 °C DC 3,6 V bis 14 V 512 8192 (13 bit) –/4096 EnDat 2.2/01 mit » 1 VSS ROC 1013/ROQ 1025 Prospekt
Drehgeber
– 8 388 608 (23 bit) EnDat 2.2/22 ROC 1023/ROQ 1035
95 °C DC 10 V bis 28,8 V DRIVE-CLiQ ROC 1023 S/ROQ 1035 S
100 °C DC 5 V ±0,5 V 100 bis 3600 – « TTL ROD 1020
» 1 VSS ROD 1080
70 °C DC 10 V bis 30 V « HTLs ROD 1030
DC 5 V ±0,25 V 5000 bis 36 0002) « TTL ROD 1070
ROD 600 12 000 min–1 – 80 °C DC 5 V ±0,5 V 512 bis 5000 – « TTL ROD 620
« HTL ROD 630
ROD 1900 4000 min–1 – 70 °C DC 10 V bis 30 V 600 bis 2400 – « HTL/HTLs ROD 1930
15
199
150 18 160
1) 2) 3)
Auch mit Functional Safety verfügbar Nach integrierter 5/10fach Interpolation Nur Klemmflansch
DRIVE-CLiQ ist eine geschützte Marke der Siemens AG.
16 17
Winkelmessgeräte für Einbau- und Hohlwellenmotoren
1)
Baureihe Hauptabmessungen Durchmesser Mechanisch Eigenfrequenz Maximale Versorgungs System Signalperioden Positionen Schnittstelle Typ Weitere
zulässige der Ankopplung Arbeits spannung genauigkeit pro Umdrehung pro Umdrehung Informa
Drehzahl fE (typisch) temperatur tionen
Winkelmessgeräte mit Eigenlagerung und integrierter Statorankopplung
–1
RCN 2001 20 mm 1500 min 1000 Hz RCN 23x1: 60 °C DC 3,6 V bis 14 V ±4“ 16 384 67 108 864 (26 bit) EnDat 2.2/02 RCN 2380 Prospekt
(abhängig von RCN 25x1: 50 °C ±2“ 268 435 456 (28 bit) mit » 1 VSS RCN 2580 Winkelmess
Schnittstelle und geräte
Arbeitstemperatur) – EnDat 2.2/22 RCN 23x03) mit Eigen
Fanuc RCN 25x03) lagerung
Mitsubishi
–1
RCN 5001 35 mm 1500 min 1000 Hz RCN 53x1: 60 °C DC 3,6 V bis 14 V ±4“ 16 384 67 108 864 (26 bit) EnDat 2.2/02 RCN 5380
(abhängig von RCN 55x1: 50 °C ±2“ 268 435 456 (28 bit) mit » 1 VSS RCN 5580
Schnittstelle und
Arbeitstemperatur) – EnDat 2.2/22 RCN 53x03)
Fanuc RCN 55x03)
Mitsubishi
–1
RCN 8001 D: 60 mm 500 min 900 Hz 50 °C DC 3,6 V bis 14 V ±2“ 32 768 536 870 912 (29 bit) EnDat 2.2/02 RCN 8380
und 100 mm (abhängig von ±1“ mit » 1 VSS RCN 8580
Schnittstelle und
Arbeitstemperatur) ±2“ – EnDat 2.2/22 RCN 83x03)
±1“ Fanuc RCN 85x03)
Mitsubishi
Modulare Winkelmessgeräte mit optischer Abtastung
ECA 4000 D1: 70 mm bis 512 mm 15 000 min–1 – 70 °C DC 3,6 V bis 14 V ±3” bis ±1,5” – – EnDat 2.2 ECA 44103) Produktinfo
Teilungstrommel D2: 104,3 mm bis 8500 min–1 ECA 4000
mit Zentrierbund; bis 560,46 mm Fanuc ECA 4490 F
stirnseitig an Welle
geschraubt Mitsubishi ECA 4490 M
ERA 4x80 D1: 40 mm bis 512 mm 10 000 min–1 – 80 °C DC 5 V ±0,5 V ±5” bis ±2” 12 000 bis 52 000 – » 1 VSS ERA 4280 C Prospekt
Teilungstrommel D2: 76,5 mm bis 1500 min–1 Modulare
mit Zentrierbund; bis 560,46 mm 6000 bis 44 000 ERA 4480 C Winkelmess
stirnseitig an Welle geräte
geschraubt 3000 bis 13 000 ERA 4880 C mit optischer
Abtastung
ERA 4282 D1: 40 mm bis 270 mm 10 000 min–1 – 80 °C DC 5 V ±0,5 V ±4” bis ±1,7” 12 000 bis 52 000 – » 1 VSS ERA 4282 C
Teilungstrommel für D2: 76,5 mm bis 2500 min–1
erhöhte Genauig- bis 331,31 mm
keit; stirnseitig an
Welle geschraubt
Modulare Winkelmessgeräte mit magnetischer Abtastung
ERM 2200 D1: 40 mm bis 410 mm 22 000 min–1 – ERM 24x0: DC 5 V ±0,5 V – 512 bis 3600 – « TTL ERM 2420 Prospekt
Signalperiode D2: 64,37 mm bis 3000 min–1 100 °C Modulare
ca. 200 µm bis 452,64 mm ERM 2280: » 1 VSS ERM 2280 Winkelmess
ERM 2400 60 °C ERM 2480 geräte
Signalperiode mit magne
ca. 400 µm tischer
Abtastung
–1
ERM 2400 D1: 30 mm bis 100 mm 60 000 min – 100 °C DC 5 V ±0,5 V – 360 bis 1024 – » 1 VSS ERM 2484
Signalperiode D2: 45,26 mm bis 20 000 min–1
ca. 400 µm bis 128,75 mm
–1
ERM 2900 D1: 35 mm bis 100 mm 50 000 min / 180 bis 400 – ERM 2984
Signalperiode D2: 54,43 mm 16 000 min–1
ca. 1000 µm bis 120,96 mm
1) 2) 3)
Weiter Schnittstellen auf Anfrage Nicht verwendet Auch mit Functional Safety verfügbar
18 19Offene Längenmessgeräte für Linearantriebe
Baureihe Hauptabmessungen Verfahr Beschleunigung Genauigkeitsklasse Messlängen Versorgungs Signal Grenzfrequenz Schaltaus Schnittstelle Typ Weitere
geschwindigkeit in Messrichtung spannung periode –3 dB gang Informa
tionen
2
LIP 6000 240 m/min 500 m/s bis ±1 µm1) 20 mm bis 3040 mm DC 5 V ±0,5 V 4 µm 1 MHz Homing-Spur » 1 VSS LIP 6081 Prospekt
Limit-Schalter Offene
Längen
« TTL LIP 6071 messgeräte
2
LIF 400 240 m/min 400 m/s ±1 µm1) 70 mm bis 1020 mm DC 5 V ±0,25 V 4 µm 1 MHz Homing-Spur » 1 VSS LIF 481
Limit-Schalter
« TTL LIF 471
2
LIC 2100 600 m/min 500 m/s ±15 µm 120 mm bis DC 3,6 V bis 14 V – – – EnDat 2.2/22 LIC 2107
Absolutes Längen- 3020 mm Auflösung
messgerät 0,05 µm
2) 2
LIC 4100 600 m/min 500 m/s ±5 µm 140 mm bis DC 3,6 V bis 14 V – – – EnDat 2.2/22 LIC 4115
Absolutes Längen- 27 040 mm Auflösung
messgerät 0,001 µm
3)
±5 µm 140 mm bis LIC 4117
6040 mm
4)
±3 µm oder ±15 µm 70 mm bis 1020 mm DC 3,6 V bis 14 V – – – EnDat 2.2 LIC 4119
2
LIDA 400 480 m/min 500 m/s ±5 µm 140 mm bis DC 5 V ±0,25 V 20 µm 400 kHz Limit-Schalter » 1 VSS LIDA 485
30 040 mm
« TTL LIDA 475
1)
±5 µm 240 mm bis » 1 VSS LIDA 487
6040 mm
« TTL LIDA 477
2
LIDA 200 600 m/min 200 m/s ±15 µm bis 10 000 mm DC 5 V ±0,25 V 200 µm 50 kHz – » 1 VSS LIDA 287
« TTL LIDA 277
1)
Mit Zerodur-Glaskeramik, bis Messlänge 1020 mm
2)
Auch mit Fanuc-, Mitsubishi-, Panasonic- und Yaskawa-Schnittstelle verfügbar
3)
Nach linearer Fehlerkompensation
4)
Auch mit Functional Safety verfügbar
20 21Gekapselte Längenmessgeräte für Linearantriebe
Schutzart: IP53 bis IP641) (EN 60529)
2)
Baureihe Hauptabmessungen Verfahr Beschleunigung Messlängen Genauigkeits Versorgungs Signalperiode Grenzfrequenz Auflösung Schnittstelle Typ Weitere
geschwindigkeit in Messrichtung klasse spannung –3 dB Informa
tionen
Längenmessgeräte mit kleinprofiligem Maßstabsgehäuse
2
LF 60 m/min 100 m/s 50 mm bis 1220 mm ±5 µm DC 5 V ±0,25 V 4 µm 250 kHz – » 1 VSS LF 485 Prospekt
Längen
messgeräte
für gesteuerte
Werkzeug
maschinen
LC 180 m/min 100 m/s2 70 mm bis 2040 mm3) ±5 µm DC 3,6 V bis 14 V – – bis 0,01 µm EnDat 2.2/22 LC 4154)
Absolutes Längen-
messgerät
±3 µm bis 0,001 µm
±5 µm 20 µm 150 kHz bis 0,01 µm EnDat 2.2/02 LC 485
±3 µm bis 0,05 µm
Längenmessgeräte mit großprofiligem Maßstabsgehäuse
2
LF 60 m/min 100 m/s 140 mm bis 3040 mm ±2 µm; DC 5 V ±0,25 V 4 µm 250 kHz – » 1 VSS LF 185 Prospekt
±3 µm Längen
messgeräte
für gesteuerte
Werkzeug
maschinen
LC 180 m/min 100 m/s2 140 mm bis 4240 mm ±5 µm DC 3,6 V bis 14 V – – bis 0,01 µm EnDat 2.2/22 LC 1154)
Absolutes Längen-
messgerät
140 mm bis 3040 mm ±3 µm bis 0,001 µm
140 mm bis 4240 mm ±5 µm 20 µm 150 kHz bis 0,01 µm EnDat 2.2/02 LC 185
140 mm bis 3040 mm ±3 µm bis 0,05 µm
120 m/min 100 m/s2 440 mm bis 28 040 mm ±5 µm DC 3,6 V bis 14 V – – bis 0,01 µm EnDat 2.2/22 LC 211
(180 m/min auf
Anfrage)
40 µm 250 kHz EnDat 2.2/02 LC 281
mit » 1 VSS
LB 120 m/min 60 m/s2 440 mm bis 30 040 mm bis ±5 µm DC 5 V ±0,25 V 40 µm 250 kHz – » 1 VSS LB 382
(180 m/min auf (bis 72 040 mm auf
Anfrage) Anfrage)
1)
Nach Anbau laut Montageanleitung
2)
Schnittstellen für Siemens-, Fanuc- und Mitsubishi-Steuerungen auf Anfrage
3)
Ab Messlänge 1340 mm nur mit Montageschiene oder Spannelemente
4)
Auch mit Functional Safety verfügbar
22 23Drehgeber und Winkelmessgeräte für
Drehstrom- und Gleichstrommotoren
Allgemeine Hinweise
Gleichlaufverhalten Übertragung der Messsignale Zur digitalen Drehzahlregelung an Auch absolute HEIDENHAIN-Messgeräte EnDat 2.1 mit 2 MHz bzw. EnDat 2.2 mit Motorströme
Für ein gutes Gleichlaufverhalten des Um bei digitaler Drehzahlregelung ein gutes Maschinen mit hohen Anforderungen an für „digitale“ Antriebe liefern zusätzlich 16 MHz Taktfrequenz) oder EnDat3 (12,5 Bei Motoren können nicht zulässige Ströme
Antriebs wird vom Messgerät eine große dynamisches Verhalten des Antriebs zu er- die Dynamik ist eine hohe Anzahl von sinusförmige Inkrementalsignale mit den oder 25 Mbit/s) auf inkrementale vom Rotor zum Stator auftreten. Dies kann
Anzahl von Messschritten pro Umdre reichen, sollte die Abtastzeit des Drehzahl- Messschritten erforderlich – üblicherweise gleichen Eigenschaften. Absolute Messge- Signalauswertung verzichtet werden. zu einer Überhitzung des Messgerätelagers
hung benötigt. HEIDENHAIN hat daher reglers ca. 125 µs nicht überschreiten. Die mehr als 500 000 pro Umdrehung. Für räte von HEIDENHAIN haben zur seriellen und somit zu einer Verkürzung der Lebens-
Geräte im Lieferprogramm, die abgestimmt Istwerte für den Lage- und Drehzahlregler Applikationen mit Standardantrieben sind, Datenübertragung von codierten Positi- Vorteile dieser Datenübertragungstechnik dauer des Lagers führen. Daher empfiehlt
auf das geforderte Gleichlaufverhalten ent- müssen dazu möglichst verzögerungsfrei in analog zum Resolver, ca. 60 000 Mess- onswerten und weiteren Informationen zur sind höhere Störsicherheit auf der Übertra- HEIDENHAIN den Einsatz von Messgerä-
sprechend viele Messschritte pro Umdre- der Regeleinrichtung zur Verfügung stehen. schritte pro Umdrehung ausreichend. automatischen Inbetriebnahme, Über gungsstrecke und kostengünstige Stecker ten ohne Eigenlagerung oder Messgeräte
hung ausgeben. wachung und Diagnose die EnDat-Schnitt- und Kabel. Ein Großteil der Drehgeber mit mit isolierend aufgebautem Lager (Hybrid
Um diese engen zeitlichen Anforderungen HEIDENHAIN-Messgeräte für Antriebe mit stelle (Encoder Data). Damit kann beim EnDat-2.2- oder EnDat-3-Interface bieten lager). Für nähere Informationen wenden
Ein besonders günstiges Verhalten zeigen an die Übertragung der Positionswerte vom digitaler Lage- und Drehzahlregelung sind Einsatz von HEIDENHAIN-Geräten immer zusätzlich die Möglichkeit, einen externen Sie sich bitte an HEIDENHAIN.
die HEIDENHAIN-Drehgeber und -Winkel- Messgerät zur Regeleinrichtung mit einer daher mit dem rein seriellen EnDat22-/ dieselbe Folge-Elektronik und Verkabelungs- Temperatursensor, der sich z. B. in der
messgeräte mit Eigenlagerung und Stator seriellen Datenübertragung zu erfüllen, sind EnDat3-Interface ausgestattet oder sie ge- technik eingesetzt werden. Motorwicklung befindet, auszuwerten. Fehlerausschluss für mechanische
kupplung: Fluchtungsabweichungen der hohe Taktfrequenzen notwendig (siehe auch ben zusätzlich sinusförmige Inkremental Die digitalisierten Temperaturwerte werden Ankopplung
Welle innerhalb eines gewissen Toleranz Prospekt Schnittstellen von HEIDENHAIN- signale mit Signalpegeln von 1 VSS aus Bei EnDat22 (HMC 6) und EnDat3 (HMC 2) ohne zusätzliche Leitung im Rahmen des HEIDENHAIN-Messgeräte, die für funktio-
bereichs (siehe Technische Daten) ver Messgeräten). HEIDENHAIN-Messgeräte (EnDat01). kann die serielle Datenübertragung inner- EnDat-2.2- bzw. EnDat-3-Protokolls über nale Sicherheit ausgelegt sind, können so
ursachen keine Positionsabweichungen für elektrische Antriebe geben deshalb halb des Motorkabels erfolgen. Dadurch tragen. montiert werden, dass sich die Rotor- bzw.
und das Gleichlaufverhalten wird nicht die Positionswerte über die schnelle rein Die hohe geräteinterne Auflösung der können Aufwand und Kosten für die Ver Statorbefestigung nicht unbeabsichtigt löst.
beeinflusst. serielle EnDat 2.2 bzw. EnDat 3-Schnitt EnDat22- und EnDat3-Geräte ermöglicht kabelung deutlich reduziert werden. Bandbreite
stelle aus oder übertragen zusätzliche Inkre Auflösungen bis 19 Bit (524 288 Mess- Die erreichbaren Verstärkungen des Lage- Baugröße
Positionsabweichungen innerhalb einer mentalsignale, die nahezu verzögerungsfrei schritte) bei induktiven Systemen bzw. Zur automatisierten Inbetriebnahme regelkreises und des Drehzahlregelkreises – Die Baugröße des Motors kann bei glei-
Signalperiode wirken sich auf die Positionier- in der Folge-Elektronik zur Drehzahl- bzw. mindestens 25 Bit (ca. 33 Millionen Mess- können wichtige Messgerätekennwerte aus und damit die Bandbreite des Antriebs be- chem Drehmoment um so kleiner sein, je
genauigkeit und auf das Gleichlaufverhalten Lageregelung zur Verfügung stehen. schritte) bei fotoelektrischen Geräten. dem Speicher des EnDat-Gerätes ausgele- züglich Führungs- und Störverhalten – können höher die zulässige Arbeitstemperatur ist.
des Antriebs aus. Bei geringen Vorschub sen und motorspezifische Kenngrößen durch die Steifigkeit der Ankopplung der Da sich die Temperatur des Motors auch auf
geschwindigkeiten folgt der Antrieb den Für Standardantriebe werden vor allem die Die sinusförmigen Inkrementalsignale der im OEM-Speicherbereich des Messgerätes Messgerätwelle an die Motorwelle und die die Temperatur des Messgeräts auswirkt,
Positionsabweichungen innerhalb einer besonders robusten absoluten Messgeräte EnDat01-Geräte können aufgrund ihrer abgelegt werden. Die nutzbare Größe des Eigenfrequenz der Statorankopplung be- gibt es Drehgeber für zulässige Arbeits
Signalperiode. ohne Eigenlagerung ECI/EBI/EQI oder hohen Signalgüte in der Folge-Elektronik OEM-Speichers beträgt bei den Drehge- grenzt werden. HEIDENHAIN bietet daher temperaturen bis 120 °C. Dadurch lassen
Drehgeber mit TTL- bzw. HTL-kompatiblen hoch unterteilt werden (Abbildung 1). bern der aktuellen Prospekte mindestens Drehgeber und Winkelmessgeräte für sich Motoren kleiner Baugröße realisieren.
Ausgangssignalen – bei permanent erreg- Selbst bei Drehzahlen von 12 000 min–1 1,4 KByte ( 704 EnDat-Worte). Wellenankopplungen hoher Steifigkeit an.
ten Gleichstromantrieben mit z usätzlichen erhält man bei der Signalübertragung für Die am Gerät angebauten Statorkupplun- Verlustleistung und
Kommutierungssignalen – eingesetzt. die Eingangsschaltung der Regeleinrich- Die meisten absoluten Messgeräte unter- gen haben hohe Eigenfrequenzen fE. Bei Geräuschentwicklung
tung lediglich Frequenzen von ca. 400 kHz teilen die sinusförmigen Abtastsignale be- Einbaumessgeräten und induktiven Dreh- Die Verlustleistung des Motors und die
(Abbildung 2). 1‑VSS-Inkrementalsignale er- reits im Gerät mit einem Faktor von 4096 gebern werden Stator und Rotor fest mit damit verbundene Erwärmung sowie die
lauben Kabellängen bis 150 m (siehe auch oder höher. Bei diesen Systemen kann dem Motorgehäuse bzw. der Welle ver- Geräuschentwicklung werden bei laufendem
Inkrementalsignale – 1 VSS). bei hinreichend schneller Datenübertra schraubt (siehe auch Mechanische Geräte Motor durch die Positionsabweichungen
gung der absoluten Positionswerte (z. B. ausführungen und Anbau). Diese Bauform des Messgeräts innerhalb einer Signal
ermöglicht damit eine optimale Steifigkeit periode beeinflusst. Daher setzt man be-
der Ankopplung. vorzugt Messgeräte mit einer hohen Signal
güte (besser ±1 % der Signalperiode) ein
Abbildung 1: Abbildung 2: (siehe auch Messgenauigkeit).
Signalperioden pro Umdrehung und resultierende Anzahl an Messschritten Drehzahl und resultierende Ausgangsfrequenz in Abhängigkeit
pro Umdrehung in Abhängigkeit vom Unterteilungsfaktor von der Anzahl der Signalperioden/Umdrehung Bitfehlerrate
Bei Drehgebern mit rein serieller Schnitt-
Unterteilungsfaktor Signalperioden pro Umdrehung
stelle zum Einbau in Motoren empfiehlt
Messschritte pro Umdrehung
Ausgangsfrequenz in kHz
HEIDENHAIN grundsätzlich eine Typprüfung
zur Bitfehlerrate durchzuführen.
Bei Einsatz von funktional sicheren Geräten
ohne geschlossenes metallisches Gehäuse
und/oder Kabelbaugruppen, die nicht den
elektrischen Anschlussrichtlinien entspre-
chen (siehe Allgemeine elektrische Hinweise)
ist in jedem Fall die Bitfehlerratenmessung
als Typprüfung unter Applikationsbedingun-
gen durchzuführen.
Vorausschauende Wartung
Messgeräte mit serieller Datenübertragung
liefern Informationen, die das Überwachen
des Betriebszustands und eine voraus-
schauende Wartung ermöglichen:
• Diagnose
• Abstandsmaß für optimierte, überprüf
bare Montage und Einsatzbedingungen
• externer Temperatursensor anschließbar
Signalperioden pro Umdrehung Drehzahl in min–1
24 25HMC 2 und HMC 6
Die Ein-Kabel-Lösungen für Antriebe
Üblicherweise erfordern Motoren zwei Die universelle Konzeption von HMC
separate Anschlusskabel: HMC 6 ermöglicht Ihnen – als Motorenhersteller
• Ein Messgerätekabel für den Motor ebenso wie als Maschinenhersteller –
geber und weitestgehende Flexibilität. Denn Sie
• Ein Leistungskabel für die Motor können – sowohl auf der Motor- als auch
versorgung auf der Steuerungsseite – auf Standard-
komponenten zurückgreifen.
Mit dem Hybrid Motor Cable HMC inte
griert HEIDENHAIN das Messgerätekabel Für die Ein-Kabel-Lösung HMC 6 eignen
in das Leistungskabel. Es ist also nur noch sich alle HEIDENHAIN-Messgeräte mit
ein Kabel zwischen Motor und Schalt- EnDat22-Interface bzw. rein serieller Daten-
schrank notwendig. übertragung ohne Batteriepufferung nach
Messgeräteanschlüsse RS-485. Dazu gehören Antriebsgeber für
(Kommunikationselement)
Die Ein-Kabel-Lösung HMC 6 ist speziell Servomotoren in den unterschiedlichen Bau
für das HEIDENHAIN-Interface EnDat22 Anschlüsse für Bremse größen ebenso wie Längen- und Winkel-
konzipiert – HMC 2 speziell für EnDat3. messgeräte für Direktantriebe sowie Mess-
Mit der rein seriellen Datenübertragung geräte für Funktionale Sicherheit bis SIL 3.
können bis zu 100 m Kabellänge realisiert Anschlüsse für Motor
werden. Bei HMC 6 sind aber auch alle Für die Ein-Kabel-Lösung HMC 2 eignen
anderen Messgeräte mit rein seriellen sich Antriebsgeber mit EnDat 3-Interface
RS‑485-Schnittstellen (z. B. SSI) anschließ- (Bestellbezeichnung E30-R2) und rein seri-
bar. Dadurch steht eine breite Palette an eller Datenübertragung über zwei Adern.
Messgeräten zur Verfügung, ohne dass Aktuell sind die Drehgeber der Baureihen
eine neue Schnittstelle eingeführt werden ExI 1100/1300 und ExN 1300 für funktional
muss. sichere Applikationen bis SIL 3 verfügbar.
Bei HMC sind die Adern für Messgerät, HMC 2 Auf der Steuerungsseite können Sie wie Flanschdose Stecker
Motor und Bremse in einem Kabel unter- bisher Ihre Umrichtersysteme oder Regler-
gebracht. Es wird über einen Stecker an Einheiten verwenden. Die HMC-Kabel sind
den Motor angeschlossen. Zum Anschluss so ausgeführt, dass sie einfach auf die pas-
an den Umrichter ist das Kabel aufgesplittet senden Steckverbinder konfektioniert wer-
in Leistungsanschlüsse, Bremsanschlüsse den. Das Wichtigste: Die Störsicherheit Leistungsadern Motorinternes
und Messgerätestecker. wird dadurch nicht beeinträchtigt. Ausgangskabel
Bremsadern
des Messgerätes
Bei korrekt montierten Komponenten errei- Komponenten Temperatur
chen die Steckverbindungen die Schutzart Um den Motor für die Ein-Kabel-Lösung Messgerät
IP67. fit zu machen, benötigen Sie nur wenige
Komponenten.
Anschlüsse für Bremse
Steckverbinder am Motor
Anschlüsse
für Motor
Das Motorgehäuse wird bei HMC 2 mit
Messgeräteanschlüsse einer Standard-Winkelflanschdose bzw. bei
HMC 6 mit einer speziellen Winkelflansch-
dose ausgestattet. In dieser Winkelflansch-
dose werden die Adern für das Messgerät,
Folge-Elektronik
die Motorversorgung und die Bremse zu-
sammengeführt.
Messgeräteadern
Crimpwerkzeuge für Leistungsadern Bremsadern
Die Montage der Crimpkontakte für Leis-
Vorteile tungs- und Bremsadern erfolgt mit den Leistungsadern
Die Ein-Kabel-Lösungen HMC bieten eine • Zuordnung Leistungskabel/Geberkabel in • Es sind weniger Servicekomponenten üblichen Werkzeugen.
Reihe von Kosten- und Qualitätsvorteilen der Maschine entfällt notwendig
sowohl für den Motorenhersteller als auch • Es sind weniger mechanische Bearbei- • Die Störkontur des Motors einschließlich Motorinterne Ausgangskabel
für den Maschinenhersteller: tungen notwendig (Flanschdose am Kabel ist kleiner, dadurch lässt sich der Über die motorinternen Ausgangskabel
• Vorhandene Schnittstellen können nach Motor, Durchführungen im Maschinen- Motor leichter in das Maschinengehäuse erfolgt der Anschluss des Drehgebers:
wie vor genutzt werden gehäuse) integrieren Ihr fertig verdrahtetes Kommunikationsele-
• Es sind kleinere Schleppketten möglich • Der Logistikaufwand für Kabel und • Die Kombination aus Leistungs- und ment bei HMC 6 bzw. die zwei Kontakte
• Eine geringere Anzahl von Kabeln ist Stecker ist geringer Messgerätekabel ist von HEIDENHAIN bei HMC 2 werden einfach in die Winkel-
von der Schleppkettentauglichkeit her • Die Installation ist einfacher und schneller getestet flanschdose eingeklinkt.
wesentlich günstiger • Der Dokumentationsaufwand ist
• Es steht eine breite Produktpalette an geringer Kabel mit Hybridstecker
Messgeräten für HMC 2- und HMC 6- Das Motor-Verbindungskabel HMC be Weitere Informationen:
Übertragung zur Verfügung inhaltet neben den Messgeräteadern auch
die Leistungs- und Bremsadern. Weitere Informationen zu HMC 6 und HMC 2 finden Sie in der jeweiligen Produkt
information und unter www.endat.de.
26 27Sicherheitsbezogene Positionsmesssysteme
Sichere Achsen Baumustergeprüfte Messgeräte Standardmessgeräte Fehlerausschluss für das Lösen der fordern Fehlerausschlüsse für das Lösen Standardmessgeräte
Angetriebene Achsen oder bewegte Teile Messgeräte von HEIDENHAIN werden an Neben den explizit für Sicherheitsanwen- mechanischen Verbindung der mechanischen Ankopplung in der Regel Neben den explizit für Sicherheitsanwen-
können ein großes Gefährdungspotential unterschiedlichen Steuerungen in den ver- dungen qualifizierten Messgeräten können Unabhängig von der Schnittstelle ist bei zusätzliche Maßnahmen bei der Montage dungen qualifizierten Messgeräten können
für den Menschen darstellen. Gerade wenn schiedensten Sicherheitskonzepten erfolg- auch Standardmessgeräte, z. B. mit Fanuc- vielen Sicherheitskonzepten eine sichere der Messgeräte oder für den Servicefall, auch Standardmessgeräte, z.B. mit 1 VSS-
der Mensch mit der Maschine interagiert reich eingesetzt. Hervorzuheben sind hier Schnittstelle oder mit 1 VSS-Signalen, in siche- mechanische Anbindung des Messgeräts z. B. eine Losdrehsicherung für Schrauben. Signalen, in sicheren Anwendungen ein
(z.B. Einrichtbetrieb), muss sichergestellt die baumustergeprüften Messgeräte mit ren Achsen eingesetzt werden. In diesen nötig. In der Norm für elektrische Antriebe Bei der Auswahl eines geeigneten Mess- gesetzt werden. In diesen Fällen sind die
werden, dass die Maschine keine unkont- EnDat- und DRIVE-CLiQ-Schnittstelle. In Ver Fällen sind die Eigenschaften der Messge- EN 61800-5-2 ist das Lösen der mecha geräts bzw. einer Montageart müssen diese Eigenschaften der Messgeräte mit den
rollierten Bewegungen durchführt. Hierzu bindung mit einer geeigneten Steuerung räte mit den Anforderungen der jeweiligen nischen Verbindung zwischen Messgerät Faktoren berücksichtigt werden. Anforderungen der jeweiligen Steuerung
werden Positionsinformationen der Achsen können sie als Eingebersysteme in Anwen- Steuerung abzugleichen. Hierzu können und Antrieb als zu betrachtender Fehlerfall abzugleichen. Hierzu können bei HEIDEN-
zur Durchführung einer Sicherheitsfunktion dungen mit der Steuerungskategorie SIL-3 bei HEIDENHAIN zusätzliche Daten zu den aufgeführt. Da die Steuerung derartige Feh- HAIN zusätzliche Daten zu den einzelnen
benötigt. Die Steuerung hat als auswerten- (nach EN 61508) bzw. Performance Level „e“ einzelnen Messgeräten (Ausfallrate, Fehler- ler nicht zwingend aufdecken kann, wird in Messgeräten (Ausfallrate, Fehlermodell
des Sicherheitsmodul die Aufgabe fehler- (nach EN ISO 13849) eingesetzt werden. modell nach EN 61800-5-2) angefragt wer- vielen Fällen ein Fehlerausschluss benötigt. nach EN 61800-5-2) angefragt werden.
hafte Positionsinformationen zu erkennen Im Gegensatz zu inkrementalen Messgerä- den. Wegen der Anforderungen an einen Fehler-
und darauf entsprechend zu reagieren. ten stellen absolute Messgeräte zu jeder ausschluss kann es zusätzliche Einschrän-
Zeit – also auch unmittelbar nach dem Ein- Gebrauchsdauer kungen bei den zulässigen Grenzwerten in
Abhängig von der Topologie der Achse und schalten oder nach einem Stromausfall – Wenn nicht anders spezifiziert, sind HEIDEN- den Technischen Daten geben. Zudem er-
den Auswertemöglichkeiten in der Steue- einen sicheren absoluten Positionswert be- HAIN-Messgeräte auf eine Gebrauchsdauer
rung können unterschiedliche Sicherheits- reit. Basis für die sichere Übertragung der von 20 Jahren (nach ISO 13849) ausgelegt.
konzepte verfolgt werden. Beispielsweise Position sind zwei absolute voneinander
wird bei Eingebersystemen nur ein Mess- unabhängig gebildete Positionswerte sowie
gerät pro Achse für die Sicherheitsfunktion Fehlerbits, die der sicheren Steuerung be-
ausgewertet. Hingegen können an Achsen reitgestellt werden. Die rein serielle Daten-
mit zwei Messgeräten, z.B. Linearachse mit übertragung bietet weitere Vorteile, wie Weitere Informationen: Weitere Informationen:
Drehgeber und Längenmessgerät, beide beispielsweise höhere Zuverlässigkeit, ver- Die sicherheitstechnischen Kennwerte Für die bestimmungsgemäße Verwendung des Messgeräts sind die Angaben in den
redundanten Positionswerte in der Steue- besserte Genauigkeit, Diagnosemöglichkei- sind in den Technischen Daten der Mess- folgenden Dokumenten einzuhalten:
rung miteinander verglichen werden. ten und reduzierte Kosten durch einfache geräte enthalten. Erläuterungen zu den • Montageanleitung
Eine sichere Fehleraufdeckung kann nur Verbindungstechnik. Kennwerten finden Sie in der Technischen • Produktinformation
gewährleistet werden, wenn die beiden Information Sicherheitsbezogene Positi • Kundeninformation zum Fehlerausschluss
Komponenten Steuerung und Messgerät onsmesssysteme. • Technische Information Sicherheitsbezogene Positionsmesssysteme 596632
aufeinander abgestimmt sind. Hierbei ist zu Für den Einsatz von Standardmessgerä-
beachten, dass sich die Sicherheitskonzepte ten in sicherheitsgerichteten Applikatio- Zur Implementierung in eine Steuerung mit EnDat22:
zwischen den verschiedenen Steuerungs- nen können bei HEIDENHAIN ebenfalls • Spezifikation für die sichere Steuerung 533095
herstellern unterscheiden. Dies führt auch zusätzliche Daten zu den einzelnen Pro-
dazu, dass die Anforderungen an die an dukten (Ausfallrate, Fehlermodell nach Zur Implementierung in eine Steuerung mit EnDat3:
geschlossenen Messgeräte teilweise von- EN 61800-5-2) angefragt werden. • Anwendungsbedingungen Funktionale Sicherheit 3000003
einander abweichen.
Messwertermittlung Übertragungsstrecke Messwertempfang
Sicherheitsbezogenes Positionsmesssystem
Sichere Steuerung
EnDat 2.2 EnDat 2.2 Schnittstelle 1
oder EnDat 3
EnDat Interface
Position 1 oder EnDat 3
EnDat
Master
(Protokoll und Kabel)
Position 2 Schnittstelle 2
EnDat-Master
Sichere Steuerung
Antrieb
Messgerät
Maßnahmenkatalog
Zwei unabhängige Serielle Positionswerte und Fehlerbits über
Leistungskabel Leistungsteil Positionswerte. Datenübertragung zwei Prozessorschnittstellen.
Interne Überwachung. Überwachungsfunktionen.
DRIVE-CLiQ ist eine geschützte Marke Protokollbildung. Wirksamkeitstest.
der Siemens AG.
Gesamtsystem Sicherer Antrieb mit EnDat 2.2 Sicherheitsbezogenes Positionsmesssystem mit EnDat 2.2
28 29Messprinzipien
Maßverkörperung Abtastverfahren
HEIDENHAIN-Messgeräte mit optischer Beim absoluten Messverfahren steht der Eine separate Inkrementalspur bzw. die Fotoelektrische Abtastung
Abtastung benutzen Maßverkörperungen Positionswert unmittelbar nach dem Ein- Spur mit der feinsten Teilungsperiode wird Die meisten HEIDENHAIN-Messgeräte Die absoluten Drehgeber mit optimierter
aus regelmäßigen Strukturen – sogenannte schalten des Messgeräts zur Verfügung für den Positionswert interpoliert und arbeiten nach dem Prinzip der fotoelektri- Abtastung ECN und EQN enthalten anstelle
Teilungen. und kann jederzeit von der Folge-Elektronik gleichzeitig zum Erzeugen eines optionalen schen Abtastung. Die fotoelektrische Ab- der einzelnen Fotoelemente einen groß
Als Trägermaterial für diese Teilungen die- abgerufen werden. Ein Verfahren der Ach- Inkrementalsignals verwendet. tastung erfolgt berührungslos und damit flächigen, fein strukturierten Fotosensor.
nen Glas- oder Stahlsubstrate. Bei Mess- sen zum Ermitteln der Bezugsposition ist verschleißfrei. Sie detektiert selbst feinste Seine Strukturen entsprechen in ihrer Breite
geräten für große Durchmesser dient ein nicht notwendig. Diese absolute Positions- Bei Singleturn-Drehgebern wiederholt Teilungsstriche von wenigen Mikrometern der Gitterstruktur der Maßverkörperung.
Stahlband als Teilungsträger. information wird aus der Teilung der Teil sich die absolute Positionsinformation mit Breite und erzeugt Ausgangssignale mit Dadurch kann auf die mit dem Gegengitter
scheibe ermittelt, die als Codestruktur auf- jeder Umdrehung. Multiturn-Drehgeber sehr kleinen Signalperioden. versehene Abtastplatte verzichtet werden.
Die feinen Teilungen stellt HEIDENHAIN gebaut ist bzw. aus mehreren parallelen vermögen zusätzlich Umdrehungen zu
durch speziell entwickelte, fotolithografi- Teilungsspuren besteht. unterscheiden. Die Drehgeber ERN, ECN, EQN, ERO
sche Verfahren her. sowie ROD, RCN, RQN sind nach dem
• AURODUR: mattgeätzte Striche auf abbildenden Messprinzip aufgebaut.
einem vergoldeten Stahlband; typische
Teilungsperiode 40 μm Das abbildende Messprinzip arbeitet – ver-
• METALLUR: verschmutzungsunempfind- einfacht beschrieben – mit schattenoptischer
liche Teilung aus metallischen Strichen Signalerzeugung: Zwei Strichgitter mit bei-
auf Gold; typische Teilungsperiode 20 μm spielsweise gleicher oder ähnlicher Teilungs- Lichtquelle Kondensor
• DIADUR: äußerst widerstandsfähige periode – Teilkreis und Abtastplatte – wer- LED Teilscheibe Inkrementalspur
Chromstriche (typische Teilungsperiode den zueinander bewegt. Das Trägermaterial
20 μm) oder dreidimensionale Chrom- der Abtastplatte ist lichtdurchlässig, die Tei- Absolutspur
strukturen (typische Teilungsperiode lung der Maßverkörperung kann ebenfalls
8 μm) auf Glas auf lichtdurchlässigem oder auf reflektie-
• SUPRADUR-Phasengitter: optisch drei rendem Material aufgebracht sein.
dimensional wirkende, planare Struktur; Fällt paralleles Licht durch eine Gitterstruk-
besonders verschmutzungsunempfind- tur, werden in einem bestimmten Abstand
lich; typische Teilungsperiode 8 μm und Hell-/Dunkel-Felder abgebildet. Hier befin-
kleiner det sich ein Gegengitter mit gleicher oder
• OPTODUR-Phasengitter: optisch drei ähnlicher Teilungsperiode. Bei einer Relativ-
dimensional wirkende, planare Struktur bewegung der beiden Gitter zueinander Strukturierter Fotosensor
mit besonders hoher Reflexion; typische wird das durchfallende Licht moduliert:
Teilungsperiode 2 µm und kleiner stehen die Lücken übereinander, fällt Licht
Kreisteilungen absoluter Drehgeber durch, befinden sich die Striche über den Fotoelektrische Abtastung nach dem abbildenden Messprinzip
Bei magnetischen Messgeräten dient als Lücken, herrscht Schatten. Ein strukturier-
Teilungsträger eine magnetisierbare Stahl- ter Fotosensor bzw. Fotoelemente wan-
legierung. In ihr wird die aus Nord- und deln diese Lichtänderungen in annähernd
Südpolen bestehende Teilung mit typisch Beim inkrementalen Messverfahren be- Die mit der Referenzmarke festgelegte sinusförmige elektrische Signale um. Prak-
400 µm Teilungsperiode erzeugt. Feinere steht die Teilung aus einer regelmäßigen absolute Position ist genau einem Mess- tikable Anbautoleranzen eines Messgeräts
magnetische Teilungen sind aufgrund der Gitterstruktur. Die Positionsinformation schritt zugeordnet. mit abbildendem Messprinzip werden bei
kurzen Reichweite elektromagnetischer wird durch Zählen der einzelnen Inkre- Teilungsperioden von 10 µm und größer
Wechselwirkungen und des damit ver mente (Messschritte) von einem beliebig Bevor also ein absoluter Bezug hergestellt erzielt.
bundenen engen Abtastspalts nicht mehr gesetzten Nullpunkt aus gewonnen. Da oder der zuletzt gewählte Bezugspunkt
praxisgerecht. zum Bestimmen von Positionen ein absolu- wiedergefunden wird, muss die Referenz-
ter Bezug erforderlich ist, verfügen die Teil- marke überfahren werden. Bereich der
Messgeräte mit induktivem Abtastprinzip scheiben über eine weitere Spur, die eine Empfängerspulen
arbeiten mit Metallteilungen oder Teilungs- Referenzmarke trägt.
Bereich der
strukturen auf Kupfer-/Nickelbasis. Die Tei- Erregerspulen
lungsstrukturen sind auf einem Trägermate-
rial für gedruckte Schaltungen aufgebracht. Andere Abtastprinzipien
Einige Messgeräte arbeiten nach anderen
Abtastverfahren. Die Messgeräte ERM
haben als Maßverkörperung eine perma-
nent-magnetisierte MAGNODUR-Teilung,
die über magneto-resistive Sensoren ab
getastet wird.
Die Drehgeber ECI/EQI/EBI arbeiten mit
dem induktiven Messprinzip. Hier wird ein
hochfrequentes Signal durch bewegte Tei-
lungsstrukturen in seiner Amplitude und bewegte
Phasenlage moduliert. Der Positionswert Teilungsstruktur
wird durch Rundumabtastung immer aus
den Signalen aller über den Umfang verteil-
ten Empfängerspulen gebildet. Dies er-
möglicht große Anbautoleranzen bei hoher
Kreisteilungen inkrementaler Drehgeber Auflösung. Induktive Abtastung
30 31Sie können auch lesen