Parameter-Optimierung eines Brake-by-Wire-Pedals
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Parameter-Optimierung eines Brake-by-Wire-Pedals Jennifer Werner1, Martin Düsing1*, Bernhard Bachmann2, Ali Kemal Kücükyavuz1 1 HELLA GmbH & Co. KGaA Beckumer Straße 130, 59555 Lippstadt, Deutschland; *martin.duesing@hella.com 2Fachhochschule Bielefeld, Fachbereich Ingenieurwissenschaften und Mathematik, Interaktion 1, 33609 Bielefeld Kurzfassung. Das hydraulische Bremspedal wird aufgrund 3DExperience Plattform und in Dymola entwickelt. verschiedener Vorteile bei modernen Fahrzeugen durch Ziel der Simulation ist die möglichst präzise Vorher- Brake-by-Wire-Pedale ersetzt, die keine mechanische Verbin- sage der Kennlinie Pedalkraft über Pedalweg oder syno- dung zum Bremssystem haben, sondern nur noch elektroni- nym über Pedalwinkel für festgelegte Geschwindigkeiten sche Signale vom Pedalsensor zum Bremssteuergerät über- des Pedals. Diese Kennlinien werden von den Fahrzeug- tragen. Da sich das hydraulische und das Brake-by-Wire-Pe- herstellern vorgeben und sind eine entscheidende Anfor- dal für den Fahrer weitestgehend gleich bedienen und anfüh- derung an das Produkt. len sollen, ist die Kennlinie Pedalkraft über Weg eine ent- Nach der erfolgreichen Entwicklung und Produktion scheidende Anforderung. Diese Anforderung ist je nach Fahr- des Brake-by-Wire-Pedals richtet sich der Fokus stärker zeughersteller und Fahrzeug unterschiedlich. In dieser Arbeit auf die Frage der Weiterentwicklung, die sich besonders wird ein Simulationsmodell vorgestellt, dass während der auf die Erreichung anderer Kennlinien bezieht. Dazu Entwicklung eines Brake-by-Wire-Pedals zur Anwendung wird hier eine mathematische Optimierung eingesetzt. kam. Der Fokus dieser Arbeit liegt auf einer mathematischen Ziel dieser Arbeit ist die Parameter-Optimierung ei- Optimierung des ursprünglichen Modells zur Erreichung ei- nes Modelica-Modells, um vorgegebene Kennlinien zu ner neuen Kundenkennlinie. treffen. Die Optimierung findet in MATLAB statt. Die Arbeit gliedert sich in fünf Teile. Im ersten Teil Einleitung wird das Modelica-Modell des Pedals beschrieben, wäh- rend im zweiten Teil Grundlagen der Parameteroptimie- Brake-by-Wire-Pedale stellen eine grundlegende Än- rung zusammengefasst werden. Der dritte Teil befasst derung in Bremssystemen von Automobilen dar. In klas- sich mit einer neuen MATLAB-Klassenumgebung, die sisch hydraulischen Bremssystemen betätigt ein Brems- zur praktischen Umsetzung genutzt wird. Im vierten Teil pedal mechanisch einen Hydraulikkolben. In Brake-by- wird die Optimierung durchgeführt und die Ergebnisse Wire-Systemen gibt es nur noch elektronische Signale, präsentiert. Abschnitt 5 fasst die Ergebnisse der Arbeit die vom Bremspedalsensor an das Steuergerät zur Brem- zusammen. sung übergeben werden. Diese Technik bietet verschiedene Vorteile. So lässt sich die Ansprechzeit verkürzen und dadurch der Brems- 1 Modell des Brake-by-Wire- weg verringern. Da Komponenten wie Bremskraftver- Pedals stärker, Hauptbremszylinder und ABS wegfallen oder Funktionen durch Software realisiert werden, können Zur Modellierung des Brake-by-Wire-Pedals wird die Kosten gespart werden. In Elektro- oder Hybridfahrzeu- objektorientierte Modellierungssprache Modelica ver- gen kann das Betätigen des Brake-by-Wire-Pedals auch wendet. Als Entwicklungsumgebung wird sowohl Dy- als Auslöser für die Rekuperation verwendet werden, so- mola als auch die 3DExperience Plattform von Dassault dass bei leichtem Auslösen Energie zurückverwandelt Systèmes verwendet. Die 3DExperience Plattform bietet wird, anstatt sie als Wärme abzugeben. den Vorteil, dass die Geometrie und damit die Hebellän- Während der Entwicklung eines Brake-by-Wire-Pe- gen, Volumen, Dichten und Massenträgheitsmomente dals bei der Firma Hella wurden zu unterschiedlichen automatisch vom CAD-Modell in das Modelica-Modell Konzepten jeweils Modelle zur Simulation verwendet. übernommen werden können. Nur die Kinematik, Rei- Die Modelle werden mit der Sprache Modelica in der bung und Kontakte müssen getrennt, speziell modelliert ARGESIM Report 59 (ISBN 978-3-901608-93-3), p 267-272, DOI: 10.11128/arep.59.a59038 267
werden. Liegt allerdings noch kein fertiges CAD-Modell sucht [1]. Die Alternativen unterscheiden sich durch ver- vor, so kann dieser Weg nicht beschritten werden. Ist das schiedene Parametereinstellungen des Modells, die vari- CAD-Modell noch nicht fertig, die kinematisch wichti- iert werden. gen Abmessungen liegen aber bereits vor und sollen auch Die nichtlineare Optimierung kommt bei unterschied- durch eine Simulation auf ihre Funktionalität hin über- lichen Modellen aus Natur-, Ingenieur- und Wirtschafts- prüft werden, so lässt sich mit Hilfe der Modelica Stan- wissenschaften zum Einsatz, beispielsweise bei geomet- dard Library auch effizient ein Modell aufbauen. Mit rischen Problemen, mechanischen Problemen, Parame- Modelica.Mechanics.MultiBody.Parts.BodyBox, Mode- ter-Fitting-Problemen, Schätzproblemen, Approximati- lica.Mechanics.MultiBody.Joints.Revolute und Mode- onsproblemen und bei der Sensitivitätsanalyse [1]. Un- lica.Mechanics.MultiBody.Forces.Spring lassen sich terschieden wird zwischen unrestringierten und restrin- große Teile des Pedals beschreiben. gierten nichtlinearen Optimierungsproblemen. In diesem Fall wurden die für die Kinematik wichti- Optimierungsprobleme ohne Nebenbedingungen sind gen Massenträgheitsmomente nur grob angenähert. Hoch unrestringierte Optimierungsprobleme [2]. Ein nichtline- dynamische Lastfälle lassen sich damit nicht simulieren. ares Optimierungsproblem ohne Restriktionen besitzt die Quasistatische Versuche können aber mit sehr kurzen Si- Form mulationszeiten durchgeführt werden. min ( ) (1) ∈ℝ Die Verifizierung des Modells mit einer im Entwick- mit ( ): ℝ → ℝ [1]. lungsprozess deutlich später durchgeführten Messung Ein nichtlineares Optimierungsproblem mit Neben- zeigt eine hervorragende Übereinstimmung. Abbildung 1 bedingungen wird als restringiertes nichtlineares Opti- zeigt die Messdaten in blau und die Simulationsergeb- mierungsproblem bezeichnet. Es ist gegeben durch: nisse in rot. Die Kraft in N wird über den Pedalwinkel min ( ) (2) in ° dargestellt. Es sind zwei Kurven mit Hin- und Rück- ∈ℝ weg zu sehen. Die oberen Kurven sind die Hin- und die so dass unteren die Rückkurven. Die Hysterese ist typisch für ( ) ≤ 0 (3) Bremspedale. ℎ( ) = 0 (4) und es wird angenommen, dass die Funktionen ( ): ℝ → ℝ, ( ): ℝ → ℝ , ℎ( ): ℝ → ℝ Vergleich Pedalkraft zweimal stetig differenzierbar sind [3]. Die Funktion ( ) wird dabei Zielfunktion genannt. Die Funktion Messung Systemsimulation ( ) beschreibt die Ungleichheitsbedingungen und die Funktion ℎ( ) die Gleichheitsbedingungen des restrin- gierten nichtlinearen Optimierungsproblems. Ein nichtlineares Least-Square-Problem (NLLSP) Krat in N ist ein Minimierungsproblem der Form 1 min ( ) = ∑ ( )2 , ≥ (5) ∈ℝ 2 =1 wobei jedes ( ), = 1, … , eine nichtlineare Pedalwinkel in ° Funktion im ℝ ist [4]. Ein wichtiger Einsatzbereich für NLLSPs ist der Be- Abbildung 1: Vergleich von Messung und Simulation reich des Data Fitting. Hier ist es das Ziel einen gegebe- nen Datensatz ( , ), = 1, … , an eine Modell-Funk- 2 Grundlagen der tion ( , ) anzupassen. Sei ( ) = − ( , ), = 1, … , , (6) Parameteroptimierung so führt dies auf ein Least-Square-Problem der Art (5) Während einer Optimierung werden verschiedene Al- (siehe [4]). ternativen bezüglich eines Zielkriteriums verglichen und unter allen betrachteten Alternativen wird die beste ge- 268
3 MATLAB-Klassenumgebung struct2char_FMU_class Diese Klasse dient als Übersetzer zwischen den MATLAB-Parametern und den Simulink-Parametern. Dies ist notwendig, da die Parameter aus dem Simulink- Modell in Form eines Strings vorliegen. Für die MAT- LAB-Klasse simulink_model_class muss dieser String in eine Struktur umgewandelt. Damit die Parameter wieder in das Simulink-Modell eingegeben werden können, wird Abbildung 2: UML-Diagramm MATLAB-Klassenumgebung in der Klasse struct2char_FMU_class die Struktur wie- der in einen String umgewandelt. Die Struktur kann dabei Das in Abschnitt 2 beschriebene Modelica-Modell beliebig oft verschachtelt sein oder auch eine mehrdi- wird als FMU aus Dymola exportiert und in MATLAB mensionale Struktur sein und die Felder der Struktur kön- Simulink importiert, siehe Abbildung 3. Der Block ist der nen verschiedene Datentypen besitzen. FMU-Import aus Dymola, welcher das Modelica-Modell des Brake-by-Wire-Pedals beinhaltet. Dieser hat mehrere simulink_model_class Ausgäng, allerdings sind für die Parameteroptimierung Diese Klasse ist zur Steuerung des Simulink-Modells nur die Ausgänge FootForce (entspricht der Pedalkraft) programmiert worden. Es ist möglich, die Parameter des und der Ausgang PedalTravel (entspricht dem Pedalweg) Simulink-Modells anzusprechen. Außerdem ist es mög- notwendig. Zur Optimierung soll das Simulink-Modell lich, Default-Werte für die Parameter festzulegen und das mit der FMU direkt aus MATLAB gestartet werden. Die Simulink-Modell mit einer Funktion auf die entsprechen- MATLAB-Klassenumgebung dient zum einfachen Star- den Default-Werte zurückzusetzen. Die Simulation des ten der Modellsimulation, zur Veränderung der Parame- Simulink-Modells kann ebenfalls mit der Klasse gestartet ter des Modells und zum Starten der Optimierung. Abbil- dung 2 zeigt den Aufbau der Klassenumgebung mit den drei Klassen struct2char_FMU_class, simulink_mo- del_class und optim_class. Abbildung 3: FMU-Import in Simulink des Modelica-Brake-by-Wire-Pedals 269
Abbildung 4: Ergebnis der Optimierung für OEM2 Abbildung 5: Ergebnis der Optimierung für OEM4 werden und das Ergebnis der Simulation wird automa- Vektor der Länge , die der Anzahl alle Tuner-Para- tisch in einem Attribut der Klasse abgespeichert. meter entspricht. Nach verschiedenen Tests in Simulink zeigt sich, dass Der Funktion lsqcurvefit müssen die Funktion der Solver ode23s (stiff/Mod. Rosenbrock) am schnells- ( , ), die Startwerte 0 sowie die unteren und ten und robustesten im Vergleich zu den anderen verfüg- oberen Grenzen lowerBound und upperBound für die Tu- baren Solvern ist. Dabei ist eine relative Fehlertoleranz ner-Parameter übergeben werden. Außerdem können von 10−4 ausgewählt. Die absolute Fehlertoleranz wird noch Einstellungen hinsichtlich des von der Funktion auf den Wert auto gestellt. Bei dem Bremspedal-Modell verwendeten Optimierungsalgorithmus übergeben wer- handelt es sich um ein sehr steifes System und an den den. Diese Übergabeparameter sind in der Klasse op- Kontaktstellen kommt es zu numerischen Schwierigkei- tim_class als Attribute definiert. Die MATLAB-Funk- ten. In den Tests hat sich gezeigt, dass diese Stellen mit tion lsqcurvefit stellt den Levenberg-Marquardt-Algo- einer sehr kleinen minimalen Schrittweite überwunden rithmus (Details siehe [4] und [5]) sowie ein Trust-Re- werden können. gion-Verfahren [5] zur Lösung des NLLSP zur Verfü- gung. optim_class Mit dieser Klasse ist die Steuerung des Optimierungs- prozesses des Simulink-Modells möglich. In der Klasse 4 Ergebnisse der Optimierung wird zur Optimierung die MATLAB-Funktion Abbildungen 4 und 5 zeigen Ergebnisse der Optimie- lsqcurvefit aufgerufen. Dabei handelt es sich um ein rung für zwei verschiedene Kundenkennlinien mit dem nichtlineares Least-Square-Data-Fitting-Problem. Diese gleichen Pedalmodell. Zehn verschiedene Parameter des Funktion ist Teil der Optimization Toolbox und wird be- Modells werden während der Optimierung mit dem Ziel schrieben durch angepasst, die jeweils blau dargestellte Kundenkennlinie im Kraft-Zeit Diagramm zu erreichen. Anstelle des min ∑( ( , ) − )2 (7) Kraft-Weg-Diagramms wird in der Optimierung auf das =1 Kraft-Zeit-Diagramm zurückgegriffen, da dieses Vorge- Dabei ist die Funktion ( , ) vom Anwender hen für die Optimierung einfacher ist. Die Pedale werden definiert. In diesem Fall ist es das Simulationsergebnis mit einer niedrigen konstanten Geschwindigkeit bewegt. des Bremspedal-Modells, konkret die diskreten Werte Zeit und Position des Pedals sind also linear abhängig, der Pedalkraft. Die Größe der Vektoren und sodass beide Varianten die gleiche Aussage haben. entspricht und ist gleich der Anzahl der Zeit- Die roten Kurven in Abbildungen 4 und 5 sind die schritte. Der Vektor enthält die diskreten Zeit- Näherungslösungen, die mit der Klassenfunktion opti- punkte, der Vektor die diskreten Zielwerte der mize_simulink_model erreicht werden. Der Betrag des Optimierung. Die Tuner-Parameter befinden sich im 270
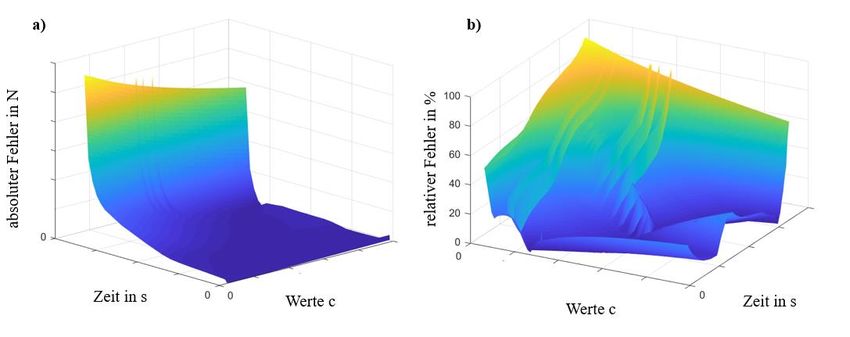
Abbildung 6: Absoluter (a) und relativer Fehler (b) einer Variation über den Parameter c absoluten Fehlers ist in gelb eingetragen. Für die Opti- Die Diagramme in Abbildung 7 zeigen eine entspre- mierung in Abbildung 4 ist der Betrag des absoluten Feh- chende Darstellung der gleichen Parametervariation. Es lers im Zeitpunkt 0 s am höchsten während der Durch- wird deutlich, dass wie auch in Abbildung 5 zu erkennen schnittsfehler bei nur 3,11 % liegt. Das Ergebnis für die ist, die großen Fehler erst zum Ende der Simulation auf- Optimierung in Abbildung 5 hat einen Durchschnittsfeh- treten. An dieser Stelle ist das Pedal maximal ausgelenkt ler von 8,80 %. und trifft auf einen Anschlag. Dieser Anschlag wurde Die Ergebnisse zeigen, dass mit einem Pedal, nur hier nicht speziell modelliert und führt daher zu den hier durch die Änderung einzelner Komponenten eine deut- dargestellten Abweichungen. Die maximale Fehlerkurve lich andere Kennlinie erreichbar ist. Die Abweichung im aus Abbildung 6.a lässt sich in Abbildung 7.a gut als die hinteren Bereich in Abbildung 5 ist auf den Kontakt des oberste Kante identifizieren. Pedals mit dem Anschlag zurückzuführen. Dieser Kon- takt wurde im untersuchten Modell vernachlässigt und kann daher hier nicht besser getroffen werden. Abbildung 6.a zeigt den Betrag des absoluten Fehlers in N über der Federkonstante c einer Feder für verschie- dene Werte von c. Dargestellt werden der maximale Feh- ler, der minimale Fehler und der Durchschnittsfehler über die Zeit oder äquivalent den Weg. Die Werte der Feder- konstanten sind in N/m dargestellt. Der minimale Fehler ist immer Null. Das bedeutet, dass für jeden getesteten Parameter zumindest zu einem Zeitpunkt die Zielkurve perfekt erreicht wird. Der maximale Fehler zeigt wiede- rum, dass zu einem Zeitpunkt der Fehler sehr hoch ist. Der Durchschnittsfehler zeigt den Fehler als Durch- schnitt über den gesamten Zeitraum an. Abbildung 6.b zeigt die relativen Fehler der gleichen Parametervariation in % an. Um die Fehler besser analysieren zu können bieten sich dreidimensionale Darstellungen an, die die Zeitkom- ponente zusätzlich aufnehmen. 271
Abbildung 7: Absoluter (a) und relativer Fehler (b) einer Variation über den Parameter c4 und die Zeit 5 Zusammenfassung Die Ergebnisse der Arbeit zeigen, dass ein vorhande- nes und verifiziertes Simulationsmodell genutzt werden kann, um die Weiterentwicklung des Produktes massiv zu unterstützen. Ein fertig entwickeltes Pedal mit einer charakteristischen Kennlinie zwischen Kraft und Auslen- kung lässt sich mit Hilfe der Parameteroptimierung durch den Austausch einzelner Komponenten, wie zum Bei- spiel der Federn, auf eine andere Kennlinie hin anpassen. Um die neuen Werte für die Parameter zu finden wird ein nichtlineares Optimierungsproblem formuliert und gelöst. Ein vorhandenes und verifiziertes Modelica-Mo- dell wird als FMU aus Dymola exportiert und mit einem Least-Square-Ansatz in MATLAB optimiert. Literaturverzeichnis [1] Stein, Oliver. Grundzüge der Nichtlinearen Optimie- rung. Springer-Verlag, 2017. [2] Reinhardt, Rüdiger; Hoffmann, Armin; Gerlach, Tobias. Nichtlineare Optimierung: Theorie, Numerik und Expe- rimente. Springer-Verlag, 2012. [3] Biegler, Lorenz T. Nonlinear programming: concepts, algorithms, and applications to chemical processes. So- ciety for Industrial and Applied Mathematics, 2010. [4] Björck, Åke. Numerical methods for least squares prob- lems. Society for Industrial and Applied Mathematics, 1996. [5] Nocedal, Jorge; Wright, Stephen. Numerical optimiza- tion. Springer Science & Business Media, 2006. 272
Sie können auch lesen