Plötzliches Unvermögen durch Myokardinfarkt: Kamerabasierte Erkennung, Einflussfaktoren und Anwendungsgrenzen - Hochschule ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Plötzliches Unvermögen durch Myokardinfarkt:
Kamerabasierte Erkennung, Einflussfaktoren und
Anwendungsgrenzen
Vasiliy Seibert Sarah Moser Alexander Garkawyj
Hochschule Furtwangen Hochschule Furtwangen Hochschule Furtwangen
Fakultät Informatik Fakultät Informatik Fakultät Informatik
Furtwangen, Deutschland Furtwangen, Deutschland Furtwangen, Deutschland
vasiliy.sviyazov@hs-furtwangen.de sarah.moser@hs-furtwangen.de alexander.garkawyj@hs-furtwangen.de
D D
Abstract— Plötzliches Unvermögen ist strategisches Thema autonom ohne verbaute Pedalerie/Lenkrad) sehen diese
und Meilenstein auf der Euro-NCAP Roadmap für das Jahr Aufforderung nicht vor.
2025. Diese Arbeit widmet sich der Frage nach der
Umsetzbarkeit und rechtlichen Rahmenbedingungen Advanced Driver Assistance Systems (ADAS) tragen
kamerabasierter Innenraumüberwachung im Hinblick auf die durch Überwachung des Fahrzeugumfelds durch Lidar (light
Erkennung plötzlichen Unvermögens durch Myokardinfarkt. imaging, detection and ranging)-, Radar (radio detection and
Nach einleitender Definition des Terminus „Plötzliches ranging) und Ultraschallsensoren zur Senkung von
Unvermögen/Sudden Sickness“ erfolgt eine Übersicht der Unfallraten bei. In den meisten Fällen sind diese Unfälle durch
NCAP Anforderungen sowie ein Überblick über den aktuellen externe Einflüsse und Fehlverhalten des Fahrzeugführers
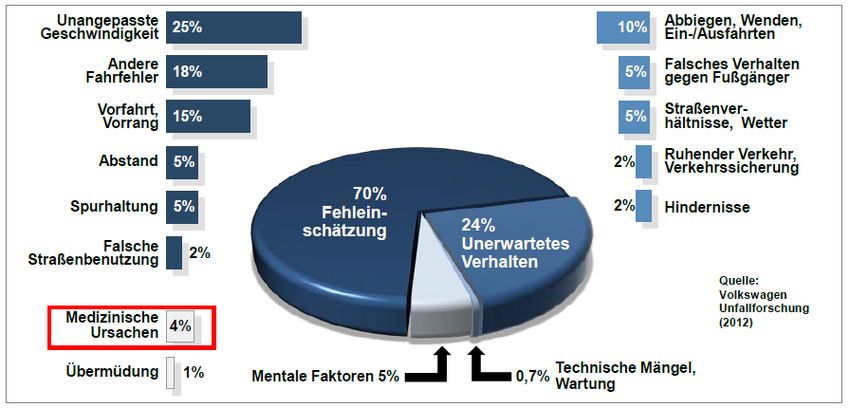
Forschungs- und Entwicklungsstand. Im Folgenden wird auf begründet. Wie in Abb. 1 dargestellt, entfallen rund 4% aller
Anforderungen aus Verbraucher- und Datenschutzsicht Unfälle auf medizinisch begründete Ursachen. Vergleicht
eingegangen. Schwerpunkt dieses Papers bildet die Erstellung, man diesen Wert mit dem Wert für unangepasste
Umsetzung und Bewertung von Use Cases zur Erkennung einer Geschwindigkeit, erscheint dieser als gering. Betrachtet man
Sudden Sickness durch Myokardinfarkt. Abschließend werden die Tatsache, dass eine Überalterung der Gesellschaft zu
offene Forschungsfragen erläutert. Ein experimentelles erwarten ist [8] in Kombination mit gleichbleibender, oder
Beispielsystem wurde exemplarisch umgesetzt und evaluiert. steigender, aktiven Teilnahme am Verkehrsgeschehen durch
Die wesentlichen Erkenntnisse dieses Prototypen waren, dass
ältere Personen, ist eine Häufung von medizinischen
besonderer Fokus/Aufmerksamkeit gelegt werden muss auf die
Insuffizienzen als Unfallursache wahrscheinlich.
Leistungsfähigkeit der Zielhardware, insbesondere im Hinblick
auf Echtzeitanforderungen.
Hochrechnungen [8] gehen davon aus, dass bis 2050 etwa
30% der Bevölkerung über 65 Jahre oder älter sein werden.
Keywords—ADAS, Sudden Sickness, Driver Monitoring Mit zunehmendem Alter steigt die Gefahr von multiplen
Systems, Plötzliches Unvermögen, Innenraumüberwachung, Insuffizienzen, deren Symptome häufig allein durch
Myokardinfarkt, Euro NCAP Anforderungen, kamerabasierte Kamerasysteme nicht eindeutig voneinander zu unterscheiden
Systeme, Use Cases, StvG sind. Risiken und Auswirkungen solch gefährlicher
Situationen, die durch plötzliches Unvermögen entstehen,
können durch die zuvor genannte Sensorik erkannt und
I. MOTIVATION teilweise auch gemildert, jedoch nicht vollständig verhindert
werden. Genannt sei hier das Stichwort „Predictability“, einer
Mit zunehmendem Ausbau von Netzwerkinfrastruktur noch weitestgehend unbehandelten Forschungsfrage.
(5G) und technischem Fortschritt auf den Gebieten
akustischer, optischer und haptischer Sensorik werden ADAS Systeme sollen potenzielle Unfallgefahren erkennen
Nutzungsszenarien im Bereich der Überwachung von und den Fahrer warnen bzw. bei Nichtreaktion des Fahrers
Personen im Fahrzeuginnenraum (PKW bis 3,5t) zunehmend entsprechende Reaktionen einleiten. Um diese (Sicherheits-)
präziser. Dies ist von immanenter Bedeutung zur Erreichung Lücke zu schließen, wurde „Sudden Sickness/ Plötzliches
der festgelegten Ziele und Anforderungen der Euro-NCAP Unvermögen“ als strategisches Ziel in die Euro-NCAP
Roadmap sowie zur Umsetzung von autonomen Fahren Roadmap für 2025 aufgenommen [1]. Potenzielle
gemäß SAE J3016 („Society of Automotive Engineers“) Lösungsansätze zur multisensorischen Erkennung von
Level 3 bis 5. Für Level 1 (z.B. Spurhalteassistent oder ACC) Plötzlichem Unvermögen sind: Gesten-, Gesichts-, und
und Level 2 Systeme gilt, dass der Fahrer jederzeit in das Positionserkennung, Puls- und Blutdruckmessung, cEKG,
System eingreifen können muss und das System aktiv den wireless EEG, sowie Müdigkeitserkennung. Weitere relevante
Fahrer informiert. Level 3 Systeme (z.B. Staupilot) erfordert Daten zur späteren Fusion mit den Kameradaten stammen
keine grundsätzliche Interaktion des Fahrers, es sei denn, er i.d.R. aus Sensoren zur Lenkwinkelbestimmung, Straßenlage,
wird aktiv dazu aufgefordert. Level 4 Systeme Geschwindigkeit und Umfeldsensorik.
(situationsabhängig autonom Pedalerie/Lenkrad optional
verbaut) und Level 5 Systeme (situationsunabhängig
103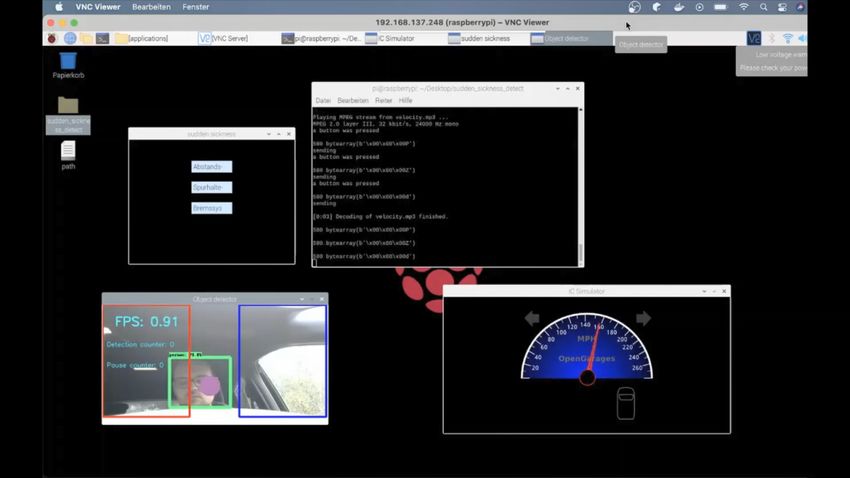
Maßnahmen führt. Vertreter plötzlich auftretender
Dysfunktionen sind unter anderem:
- 0,02-0,63% Hypoglykämie [5]
- Herzinfarkt (Myokardinfarkt) [1]
- 0,2%/Jahr Wahrscheinlichkeit durch Fehlfunktion
implantierter Defibrillatoren / Herzschrittmacher [4]
-
Steigerung der Systemsensitivität. “Emergency Stop von Aufzeichnung oder Verarbeitung nicht notwendiger
Manoeuvre” – Kontrolliertes Verzögern des Fahrzeugs bis Daten. Basierend auf zuvor genannter Erschließung erarbeitet
V(current) = 0km/h am Fahrbahnrand mit gleichzeitigem der VDA (Verband der Automobilindustrie) gemeinsam mit
Absetzen eines Notrufes sowie Betätigung der dem Bundesdatenschutzbeauftragten eine Erklärung [13],
Warnblinkanlage. welche die Begriffe Personenbezogenheit, Verantwortliche
Stelle (gem. § 3 Abs. 7 BDSG), Datenhoheit präzisiert sowie
Für eine Zulassung zum NCAP Test muss das Vehicle Angaben zum Zeitpunkt der Datenerhebung („online“ gem. §
under Test (VuT) über einen Anschnallassistenten sowie eine 3 Abs. 3 BDSG bzw. „offline“ gem. § 6c BDSG),
Erkennung von Insassen auf mindestens einem Rücksitz Auskunftsrecht (gem. § 34 BDSG) und Zulässigkeit der
verfügen. Zusätzlich muss das VuT über AEB (Autonomous Datenerhebung macht (gem. 28 Abs. 1 S. 1 Nrn. 1 oder 2
Emergency Braking), LSS (Lane Support Systems) und/oder BDSG, §§ 11 ff. Telemediengesetz).
SAS (Speed Assist Systems) verfügen.
Die uns vorliegende Gesetzesnovelle der StVG nennt in
Weiterhin muss der Hersteller ausreichend Details zur §1g verpflichtend zu speichernde Daten, die nach Meinung
Implementierung und bereits durchgeführter Testfälle des der Autorin dieses Kapitels im Kontrast zum Gebot der
DMS zur Verfügung stellen, sowie etwaige Simulationen und Datensparsamkeit stehen. Im Folgenden sind dies [15]:
Testdaten deutlich zur Unterscheidung kennzeichnen. Das
DMS muss während jedes Fahrzyklus standardmäßig • Fahrzeugidentifizierungsnummer, Positionsdaten
betriebsbereit und aktiv sein. Ein versehentliches Abschalten
ist nicht zulässig (z.B. durch falsche Positionierung der Taste • Anzahl und Zeiten der Nutzung sowie der Aktivierung
im Cockpit). Im Rating für 2020 können nach erfolgreicher und der Deaktivierung der autonomen Fahrfunktion
NCAP Prüfung maximal 3.0 Punkte (1 Punkt für DMS sowie • Anzahl und Zeiten der Freigabe von alternativen
2 Punkte für vorhandene Gurtwarner) angerechnet werden. Fahrmanövern
Für dieses Paper relevant ist der Ansatz einer zeitlichen • Systemüberwachungsdaten einschließlich Daten zum
Begrenzung, wann von einem plötzlichem Unvermögen Softwarestand,
ausgegangen werden kann.
• Umwelt- und Wetterbedingungen
B. Datenschutz
Die Erhebung und Verarbeitung personenbezogener • Vernetzungsparameter wie beispielsweise
Daten unterliegt europäischem Datenschutz EU-2016/679 Übertragungslatenz und verfügbare Bandbreite
sowie dem Bundesdatenschutzgesetz (BDSG). Hierzu • Name der aktivierten und deaktivierten passiven und
gehören auch Daten, die im Zuge der Fahrerüberwachung aktiven Sicherheitssysteme, Daten zum Zustand dieser
erhoben und gesammelt werden. Von personenbezogenen Sicherheitssysteme sowie die Instanz, die das
Daten ist die Rede, sobald Daten einer „bestimmten Person“ Sicherheitssystem aus-gelöst hat
zugeordnet werden können oder Bezug zu einer
„bestimmbaren“ Person nehmen. Sobald ein Fahrzeug • Fahrzeugbeschleunigung in Längs- und Querrichtung
zugelassen wird, ist der Halter über die Fahrgestellnummer
identifizierbar. Diese und ähnlich eindeutige Daten „gehören“ • Geschwindigkeit, Spannungsversorgung
somit dem Halter, nicht etwa dem Fahrzeughersteller oder • Status der lichttechnischen Einrichtungen
Zulieferbetrieben. Sog. Event-Data-Recorder sind als closed-
loop Systeme anzulegen, die eine Zuordnung oder • Von extern an das Kraftfahrzeug gesendete Befehle
Identifikation des Fahrzeugführers verhindern sollen. Eine und Informationen
beabsichtige Manipulation oder eine unbeabsichtigte Die zuvor genannten Daten sind bei Eingriffen durch die
Verbreitung soll damit verhindert werden. Für Systeme zur Technische Aufsicht, Konfliktszenarien, nicht-planmäßigen
Müdigkeitserkennung gilt, dass sie nicht kontinuierlich Daten Spurwechseln sowie Störungen im Betriebsablauf
aufzeichnen sollen, was für eine lückenlose Diagnostik zur aufzuzeichnen. Nach Abs.4 werden ebenfalls Vor- und
Erkennung plötzlichen Unvermögens so nicht tragbar ist. Nachname sowie Qualifikation der technischen Aufsicht
Diese Systeme leben von der Aktualität ihrer Daten und der erhoben. Der so entstehende Datensatz ist dem
Verarbeitung in Echtzeit. Von Interesse ist in diesem Kraftfahrtbundesamt auf Verlagen vorzulegen. Die Daten
Zusammenhang die Frage der Datenvorhaltung zur weiteren beim KbA werden 3 Jahre nach Einstellung (= Abmeldung)
Verarbeitung (z.B. im nichtflüchtigen Speicher). Wörtlich ist des Fahrzeuges gelöscht. Anonymisierte Daten werden vom
von „should not continuously record nor retain any data“1 die KbA zu Zwecken der Forschung zur Verfügung gestellt.
Rede. Gleich wie es im Jahr 2015 eine EU Verordnung zur
Erhebung und Verarbeitung der Daten durch
Notrufassistenten2 (sog. eCalls) gab, ist dies auch für Driver
C. StVG (Straßenverkehrsgesetz)
Monitoring Systeme zu erwarten.
Plötzliches Unvermögen, zeichnet sich vor allem durch die
In einer Entschließung [12] aus dem Jahr 2014 forderte der Unabwendbarkeit und Unvorhersehbarkeit des Auftretens
Bundesbeauftragte für Datenschutz und Sicherheit die aus. Dies ist von großer juristischer Bedeutung von Unfällen
Automobilindustrie dazu auf, den Endkunden/Nutzer über alle mit Schadensfolge. So kann ein Fahrer zum Zeitpunkt der
gesammelten Daten und Schnittstellen zur Übertragung dieser Vertragsunterzeichnung vollkommen Fahrtüchtig gewesen
Daten aufzuklären und dies schriftlich zu fixieren (gemäß § 4 sein. Eine Arglist oder Täuschung des Versicherers ist hiermit
Abs. 1 BDSG). Zudem fordert dieses Schreiben „Privacy by auszuschließen. Ist folglich eine grundsätzliche Fahreignung
Design“ (die Systemkonzeption unter Datenschutzaspekten) gegeben, ist ein potenzieller Schaden über Haftpflicht-, Teil-,
sowie „Privacy by default“ (nutzerfreundliche und Vollkasko zu regeln. Eine Veränderung der Haftungslage
Grundeinstellungen im Hinblick auf Datenschutz). Zudem gilt ist ebenfalls auszuschließen, wenn in Folge eines plötzlichen
der Grundsatz der Datensparsamkeit, also der Vermeidung
105Unvermögens das Fahrzeug durch vorhandene Kombiinstrument verbaute Infrarotkamera zur Überwachung
Assistenzsysteme an den Fahrbahnrand überführt und zum des Fahrers verwendet. Beim nicht auf den Verkehr
Stillstand gebracht wird. Ein zum Stillstandbringen auf dem gerichteten Blick (durch Ausrichtung des Kopfes,
eigenen Fahrstreifen erscheint weder sinnvoll noch Körperhaltung und verschlossenen Augen) und einer vom
erstrebenswert (Urteil des BGH, NZV 1995, 145 und Urteil ADAS vernommenen Kollisionsgefahr, benachrichtigt das
des OLG Brandenburg, BeckRS 2008, 14677). Etwaige Fahrzeug den Fahrer durch mehrere Alarmmöglichkeiten
Schadenersatzforderungen müssen durch den Verursacher (visuell, akustisch, Bremsstöße). Erhält das Fahrzeug keine
jedoch nach § 7 StVG (Straßenverkehrsgesetz) nicht geleistet Reaktion vom Fahrer führt es selbstständig eine Notbremsung
werden; eine Gefährdungshaftung wird aufgrund der durch, siehe auch „Toyota Enhanced Pre-Crash Safety
Unabwendbarkeit des Ereignisses ausgeschlossen. System“ [16]. Neben Kamerabasierten Detektionsmethoden
werden auch Lenkräder mit Induktionssensoren verwendet,
Im Februar 2021 wurde ein Gesetzentwurf der CSU um festzustellen, ob der Fahrer das Fahrzeug führt. Die
vorgestellt, wonach §1c um die §§1d bis 1l erweitert werden darauffolgenden Maßnahmen des Fahrzeugs auf einen nicht
sollten. Dies schließt auch eine Definition von autonom reagierenden Fahrer sind identisch zu kamerabasierten
fahrenden Fahrzeugen ein. Von besonderem Interesse ist (3): Varianten [17].
„Technische Aufsicht eines Kraftfahrzeugs mit autonomer
Fahrfunktion im Sinne dieses Gesetzes ist diejenige natürliche
Person, die dieses Kraftfahrzeug während des Betriebs gemäß
§ 1e Absatz 2 Nummer 8 deaktivieren und für dieses
Kraftfahrzeug gemäß § 1e Absatz 2 Nummer 4 und Absatz 3
Fahrmanöver freigeben kann. [15]“, da dies bei absichtlicher
Deaktivierung des ADAS Systems vermutlich (zum Zeitpunkt
dieser Arbeit liegen noch keine entsprechenden Quellen vor)
eine Haftung durch den Hersteller ausschließt. Systeme,
welche sich nicht deaktivieren lassen, müssen gem. (2),
Absatz 7 selbstständig ihre Systemgrenzen erkennen und bei
Bedarf/Störung in einen risikominimierenden Zustand
gelangen, indem die Warnblinkanlage gestartet und das
Fahrzeug an einer sicheren Stelle zum Halten gebracht wird Abb. 3. Erkennbarkeit medizinisch begründeter Fahruntauglichkeiten [7]
[15].
Um die Frage nach möglicher und vor allem zuverlässiger
IV. FORSCHUNGSSTAND Detektion eines Myokardinfarktes hinsichtlich Machbarkeit
BMW forscht an einem Autobahn-Notfallpiloten, der das zu beantworten, ist eine Bewertung verfügbarer,
Fahrzeug sicher an den Fahrbahnrand bringen soll. minimalinvasiver oder drahtloser Sensorik notwendig. Zur
Entsprechende Funktionsarchitekturen und Betrachtung kamen bei [7]: cEKG (Capacitve EKG,
Entscheidungsbäume wurden vorgestellt [10]. Eine zentrale Verbauung einer Elektrode in der Sitzfläche sowie einer
Forschungsfrage war, wie man andere Verkehrsteilnehmer zu Referenz in der Lehne), Ballistokardiografie (BCG, indirekte
rücksichtsvollem und kooperativen Verhalten im Messung durch Drucksensoren parallel zur Wirbelsäule),
medizinischen Ernstfall anregen kann [11]. Abbildung 2 zeigt kamerabasierte Verfahren, Magnetisch-Induktive Verfahren,
die Erkennbarkeit möglicher Ursachen für plötzliches radarbasierte Verfahren, Elektroenzephalographie (EEG auch
Unvermögen, wie bereits durch Mirwaldt, Bartels, Thanh- kontaktlos in Kopfnähe möglich). Abbildung 3 (entnommen
Binh To und Pascheka dargelegt. In derzeitig verfügbaren aus [7]) stellt die zuvor genannten Möglichkeiten in
Ausstattungsvarianten aktueller Fahrzeugmodelle Zusammenhang mit einem potenziellen Verbauort im
verschiedener Autohersteller wird das Fahrzeug auf der Fahrzeug dar.
momentan befahrenen Fahrbahnspur durch das “Emergency
Stop Manoeuvre” zum Stillstand gebracht. Alarmierende
akustische und visuelle Signale machen andere
Verkehrsteilnehmer auf einen Notfall im Fahrzeug
aufmerksam, wie der neue Volkswagen Golf 8 demonstrieren
kann [17].
Abb. 4. Verbauorte und Detektierbarkeit nach [7]
Abb. 2. Toyota Driver-monitoring Function [16]
Im Kontext der Erkennung, ob der Fahrer seine
Aufmerksamkeit auf den Verkehr gerichtet hat, wird eine im
106V. FORSCHUNGSFRAGE/-METHODIK - Thonny Python IDE
Dieses Paper stellt sich der Frage, nach zuverlässiger - TensorFlow
Erkennung der eine Myokardinfarktes durch das vorliegende
und in Unterkapitel B beschriebene System. - Kabel etc.
A. Strategischer Literatur-Review - Versuchslaptop
Zur Beantwortung der Forschungsfrage kamen einerseits VI. USE CASE 1: ERKENNUNG UND MÖGLICHE REAKTION AUF
ein strategischer Literatur-Review nach Kitchenham [14] zur PLÖTZLICHES UNVERMÖGEN DURCH MYOKARDINFARKT
Anwendung, zum anderen die prototypische Umsetzung des
Use Cases „Plötzliches Unvermögen“. Zur Eingrenzung der A. Beschreibung
Literatur wurden, absteigend nach Relevanz, folgende Die Autoren dieses Papers wollen sich mit theoretisch
Kriterien erarbeitet: realitätsnahen Use Cases, beim Eintreten von
Myokardinfarkten am Fahrer, befassen und diesen
TABELLE II. LITERATURAUSWAHLKRITERIEN
Anwendungsfall prototypisch umsetzen.
Literatur Kat
Bücher/Artikel zum Thema Plötzliches Unvermögen
UND klinischer Symptomatik mit Bezug auf
A
Herzinfarkt, aktue respiratorische Insuffizienz und
Hypoglykämie
Bücher/Artikel zum Thema Plötzliches Unvermögen
ODER klinischer Symptomatik mit Bezug auf
B
Herzinfarkt ODER aktue respiratorische Insuffizienz
ODER Hypoglykämie
Artikel zu Euro NCAP Anforderungen/ Roadmap C
Konferenz-Paper, Interviews oder Artikel zu
D
aktuellen ADAS Systemen
Tabelle 2 – Kriterien
Basierend auf o.g. Kriterien konnten primär die in Tabelle 3
Literaturauswahl
genannten Quellen in Betracht gezogen werden.
TABELLE III. LITERATURAUSWAHL
Literatur Kat.
- P. Waldmann, N. Kaempchen, M. Ardelt, F. Homm, „Der
Nothalteassistent – abgesichertes Anhalten bei plötzlicher Abb. 5. Use Case Diagramm – Plötzliches Unvermögen [Eigene
Fahrunfähigkeit des Fahrzeugführers“, 2010 Darstellung]
- Mirwaldt, P., Bartels, A., To T.-B., Pascheka P. „Gestaltung A
eines Notfallassistenzsystems bei medizinisch bedingter In diesem UML Diagramm sind die Akteure Fahrer,
Fahrunfähigkeit“
„Driver State Monitoring“ und „Advanced Driver Assistant
Klein, H., Krämer, A., Pieske, B. et al. „Fahreignung bei Systems“ zu erkennen. Außerdem lässt sich die
kardiovaskulären Erkrankungen. (2010) B
Systemgrenze „Plötzliches Unvermögen“ in die Bereiche
https://www.euroncap.com/en/for-engineers/technical-
papers/
C „Erkennung“ (Überwachung des Fahrers durch das „Driver
- H. Ehmen „Fahrleistungsrelevante Parameter im Alter“, State Monitoring“) und „Eingriff“ (Initialisierung von
2010 Maßnahmen durch das „Driver State Monitoring“ und der
. “Datenschutz im Kraftfahrzeug – Automobilindustrie ist D Ausführung durch das „Advanced Driver Assistant System“)
gefordert“ 88. Konferenz der Datenschutzbeauftragten des
Bundes und der Länder, 2014 unterteilen. Innerhalb der Erkennung befinden sich die Use
Tabelle 3 Literaturauswahl Cases:
• Fahrzeug bedienen
B. Versuchsaufbau/Prototyp • Fahrerstatus beobachten
Zur prototypischen Umsetzung des Use Cases kam zur • Unvermögen erkennen
Anwendung:
Innerhalb des Eingriffs befinden sich die Use Cases mit
- Raspberry Pie 4, 4 GB RAM (Raspebian Extension Points:
[Raspberry Pi OS])
• Warnung
- Speicherkarte Kingston 16 GB
• Abstand- und Spurkontrolle
- Logitech USB Webcam
• Warnsignale
- XboX® One S Controller
- JBL®Lautsprecher mit AUX Verbindung • Milder Eingriff
- 1 x Powerbank (6000 mAh, 5 V, 2 A) • Gurtanziehen
- VNC Viewer/Server • Brems- und Lenkmanöver
107• Harter Eingriff - Körper vom Fahrer verweilt in einer ungeeigneten
Position
• Warnblinklicht und Hupe - Fahrer Lenkverhalten stimmt nicht mit Spurstreifen
überein
• Nothaltemanöver - Fahrer Beschleunigungs- und Bremsverhalten
stimmt nicht mit zulässiger Geschwindigkeit überein
Ablauf 1. ADAS greift ein (hält Fahrzeug auf der Spur,
vermeidet Auffahrunfälle und Kollisionen) und ein
Von Interesse innerhalb dieser Ausarbeitung sind die Use Signalton (je Sekunde) und Gelbe Signalfarbe am
Cases „Unvermögen Erkennen“, „Warnung“, „Milder Tacho und Benachrichtigung (Achtung, fahren)
Eingriff“ und „Harter Eingriff“ (siehe Abb. 6., Abb. 7., 2. Warte auf Bestätigung des Fahrers (wieder
Fahrtüchtig)
Abb.8. und Abb. 9.). 3. 3 Sekunden nach Start „Warnung“ Übergang in
B. Anforderungen an die Use-Cases „Milder Eingriff“
Alternativen 2a1. Der Fahrer legt die Hände ans Lenkrad und
Mit Berücksichtigung der Euro-NCAP Anforderungen steuert das Fahrzeug
und dem Ziel der Erkennung eines Myokardinfarktes wurden 2a2. Der Fahrer schaut wieder auf die Straße
zum Entwurf des Use Case „Unvermögen Erkennen“ 2b1. Der Fahrer richtet seinen Körper auf die
mehrere Überlegungen getroffen. Diese beinhalten die gewohnte fahr Position
Herannahme von Tabelle 1 – Klinische Symptome und 2b2. Der Fahrer schaut wieder auf die Straße
dessen Identifikationsmerkmale eines Myokardinfarktes. Es
2c1. Der Fahrer schaut wieder auf die Straße
wird herausgeleitet, dass Kopfposition (Fall nach vorne, nach
2c2. Der Fahrer bestätigt seine Fahrtüchtigkeit
unten sehend, nach hinten lehnend, nach hinten gebogen, Tabelle 4 Textueller Use Case – Warnung [Eigene Darstellung]
Blickrichtung), Augen (Zeit offener Augen, Zeit
geschlossener Augen, Pupillenerweiterung), Mimik TABELLE V. USE CASE – MILDER EINGRIFF
(Augenbrauen Position, Mundwinkel), Körperhaltung (nach Textuelle Milder Eingriff
vorne lehnend, nach hinten lehnend, seitlich lehnend, Beschreibung
Position Hände) und Fahrverhalten (Lenkverhalten, von Use Case
Pedalbedienung, Hände am Lenkrad, Einhaltung der Vorbedingung Eingabeanforderung aus Warnung nicht erfolgt, alle
ADAS Einheiten aktiv, Fahrzeug fahrtüchtig
Fahrspur) zu identifizierende Eingabedaten für die Detektion
Nachbedingung - Übergang in „Harter Eingriff“
des plötzlichen Unvermögens sind. Erweiterbar sind die im Erfolgsfall - Fahrer bestätigt seine Teilnahme
Eingabedaten bei Überwindung technischer Nachbedingung - Fahrer bestätigt seine Teilnahme
Herausforderungen auf Körpertemperatur, Puls und Sprache. im Misserfolg
Kompromisse wurden jedoch in der Umsetzung des Akteure Fahrer, ADAS, DSM
Auslösendes - Fehlende Fahrbeteiligung vom Fahrer
Prototyps vorgenommen und zur Erhöhung der Stabilität der Ereignis - Fehlende Bestätigung zur Fahrtüchtigkeit vom
Erfassung (fehlerfreie Erfassung eines Unvermögens) die Fahrer
Qualität (Menge an zu identifizierenden Daten) reduziert. - Erfassung des plötzlichen Unvermögens
Somit entschieden sich die Autoren die Kopfposition, Augen (Systemgrenze Myokardinfarkt)
und Mimik in der Umsetzung nicht zu berücksichtigen, was Ablauf 1. Passagieranschnallgurte werden gestrafft und
Alarmsignal wird lauter und Rote Alarmfarbe und
nicht die Bedeutsamkeit dieser Daten ausschließt. Durch die Benachrichtigung (Notfall Stopp wird eingeleitet)
Limitierung der zur Verfügung stehenden Hardware (wie in 2. Fahrzeug kann nicht mehr beschleunigen
B. Versuchsaufbau/Prototyp ersichtlich) verzichten die 3. Fahrzeug tätigt zwei Bremsstöße
Autoren auf Eingabedaten der Kategorie Fahrverhalten. 4. „Harter Eingriff“ wird eingeleitet
Alternativen 1a1. Der Fahrer schaut wieder auf die Straße
C. Beschreibung theoretisch realitätsnaher Use-Cases 1a2. Der Fahrer richtet seinen Körper auf die
gewohnte fahr Position
Durch die Überlegungen der Autoren wurden mit den 1a3 Der Fahrer legt die Hände ans Lenkrad und
gesammelten Informationen die drei nennenswerten Use steuert das Fahrzeug
1a4. Der Fahrer bestätigt seine Fahrtüchtigkeit
Cases innerhalb des Use Case „Plötzliches Unvermögen“
herausgearbeitet, um eine detailliertere Übersicht zum DSM (Für 2, 3 und 4 wiederholen)
System im Fall eines Plötzlichen Unvermögens zu Tabelle 5 Textueller Use Case – Milder Eingriff [Eigene Darstellung]
beschreiben.
TABELLE VI. USE CASE – HARTER EINGRIFF
TABELLE IV. USE CASE - WARNUNG
Textuelle Harter Eingriff
Textuelle Warnung Beschreibung
Beschreibung von Use Case
von Use Case Vorbedingung Eingabeanforderung aus Warnung und Milder
Vorbedingung Funktionsfähigkeit aller ADAS Einheiten, Fahrzeug Eingriff nicht erfolgt, alle ADAS Einheiten aktiv,
fahrtüchtig, Fahrer fahrfähig Fahrzeug fahrtüchtig, Myokardinfarkt detektiert
Nachbedingung - Übergang in „Milder Eingriff“ Nachbedingung - Fahrzeug Startbereit
im Erfolgsfall - Fahrer bestätigt seine Teilnahme im Erfolgsfall
Nachbedingung - Fahrer bestätigt seine Teilnahme Nachbedingung - Fahrzeug Startbereit
im Misserfolg im Misserfolg
Akteure Fahrer, ADAS, DSM Akteure Fahrer, ADAS, DSM
Auslösendes - Fahrer hat die Hände nicht am Lenkrad Auslösendes - Fehlende Fahrbeteiligung vom Fahrer
Ereignis - Fahrer dreht den Kopf weg von der Straße Ereignis - Fehlende Bestätigung zur Fahrtüchtigkeit vom
- Fahrer hat geschlossene Augen Fahrer
- Kopf vom Fahrer verweilt in einer ungeeigneten Ablauf 1. Warnblinklicht und Hupe und Auffahrt- und
Position Kollisionsassistent aktiv bis zum Stillstand
1082. Spur halten Sicherheitsmaßnahmen. Parallel zur Benachrichtigung über
3. Spurwechsel Richtung Fahrbahnrand die mangelnde Aufmerksamkeit werden die notwendigen
4. Am Fahrbahnrand halten
ADAS Systeme (Abstandstempomat, Spurhalteassistent,
Alternativen 2a1. Gefahrensituation zwingt zum sofortigen Kollisionsnotfallassistent) aktiviert, um Gefahren während
Nothalt der Ablenkung zu vermeiden. Reagiert der Fahrer nicht,
festgestellt durch Daten vom DSM oder fehlender
3a1. Gefahrensituation zwingt zum sofortigen
Nothalt Knopfdruckbestätigung und fehlender korrekter Führung des
Fahrzeugs und Ablauf der Abfragezeit wird in die 2.
Eskalationsstufe übergegangen und der Use Case „Milder
3b1. Spurwechsel nicht möglich Eingriff“ gestartet.
3b2. Auf freie Spur warten
3b3. Keine Möglichkeit zum Spurwechsel
3b4. Auf der Spur halten In der 2. Eskalationsstufe werden Benachrichtigungstöne
und visuelle Nachrichten auf dem Tacho deutlicher (Lauterer
3c1. Spurwechsel nicht möglich Ton, aufblinkende Anzeige). Angelegte Passagiergurte
3c2. Auf freie Spur warten
3c3. Weiter mit 3. werden gestrafft, um die Passagiere bei einer möglichen
Kollision zu schützen und den Fahrer, wenn möglich, zu
4a1. Gefahrensituation zwingt zum sofortigen warnen. Anschließend führt das Fahrzeug Bremsstöße durch,
Nothalt um den Fahrer gegebenenfalls wach zu rütteln und andere
Tabelle 6 Textueller Use Case – Harter Eingriff [Eigene Darstellung]
Verkehrsteilnehmer über eine ungewöhnliche Situation zu
informieren. Reagiert der Fahrer nicht, festgestellt durch
D. Beschreibung theoretisch realitätsnaher Daten vom DSM oder fehlender Knopfdruckbestätigung und
Eskalationsstufen fehlender Eingriff und korrekter Führung des Fahrzeugs geht
das Fahrzeug in die 3. Eskalationsstufe über und der Use Case
„Harter Eingriff“ tritt ein und der Myokardinfarkt des Fahrers
bestätigt. Des Weiteren beschleunigt das Fahrzeug in dieser
Stufe nicht weiter.
In der 3. Eskalationsstufe alarmiert das betroffene
Fahrzeug andere Verkehrsteilnehmer durch Hupen und
Warnlichtsignale, die bis zum Stillstand fortgeführt werden.
Der Stillstand auf der aktuell befahrenen Spur oder am
Fahrbahnrand ist abhängig von der Straßenbeschaffenheit.
Spurhalte-, Spurwechsel-, Notfallbrems- und
Kollisionswarnsysteme werden verwendet, um das führerlose
Fahrzeug so zu navigieren, dass Kollisionen mit anderem
Verkehrsteilnehmer und der Umgebung vermieden werden.
Neben der Geschwindigkeitsverringerung bis zu Stillstand,
werden die Systeme das Fahrzeug an den Fahrbahnrand
navigieren. Erfolgte der Halt bis zum Stillstand wird die 4.
Eskalationsstufe eingeleitet. Andere Verkehrsteilnehmer
werden durch die Warnblinklichtanlage und durch akustische
und visuelle Benachrichtigungen aufmerksam gemacht und
informiert, dass der Fahrer an einem Myokardinfarkt leidet.
Abb. 6. Funktionen in den Eskalationsstufen [Eigene Darstellung] Das Fahrzeug wird ebenfalls entriegelt. Es folgt ein Notruf
bei der vom Fahrzeughersteller hinterlegten Stelle. Der
Das DSM darf nicht deaktivierbar sein und muss mit Beginn Beantwortende aus der Notrufstelle wird die Lage
der Fahrzeugbedienung aktiv sein. Ungeachtet des analysieren und die notwendigen Notfallkräfte verständigen.
Myokardinfarktes wird das DSM jede Eingabedate auf
Einschränkung der Fahrsicherheit auswerten. Wird eine E. Beschreibung der prototypischen Use-Cases
Einschränkung erfasst, greift der Use Case „Warnung“ mit Mit dem Kompromiss die Stabilität der Erfassung zu
der ersten Eskalationsstufe. Parallel zur „Warnung“ wird das erhöhen, durch Reduzierung der Qualität (Rauswurf der
DSM weiterhin Daten auswerten und diese kategorisieren. Eingabedaten Augen, Mimik, Kopfhaltung) und der
Werden alle auf einen Myokardinfarkt hinweisende Daten hardwareseitigen Einschränkung des Prototyps (Rauswurf
erfasst und Daten ausgeschlossen, die auf andere der Eingabedate Fahrverhalten) haben die Autoren Use-
medizinische Ursachen deuten, dann wird diese Information Cases für den realisierten Prototyp entworfen (siehe A).
bei der Verständigung des Rettungsdienstes verwendet.
Im Use Case „Warnung“ wird der Fahrer darüber
benachrichtigt, dass seine Aufmerksamkeit nicht mehr auf
den Straßenverkehr und der Fahrzeugführung ausgelegt ist
und dieser sich diesen wieder widmen soll. Das DSM ist im
Prozess die Herkunft der Ablenkung zu identifizieren. Für
den Eintritt ist die Herkunft nicht entscheidend, sondern die
109TABELLE VII. USE CASE - WARNUNG
Textuelle Warnung
Beschreibung
von Use Case
Vorbedingung Abstands-, Spurhalte- und Bremssystem bereit,
Fahrzeug fahrtüchtig, Fahrer fahrfähig,
Geschwindigkeit > 0 MPH
Nachbedingung - Übergang in „Milder Eingriff“
im Erfolgsfall - Fahrer bestätigt seine Teilnahme
Nachbedingung - Fahrer bestätigt seine Teilnahme
im Misserfolg
Akteure Fahrer, Abstandsassistent, Spurhalteassistent,
Bremsassistent, DSM, Fahrzeug
Auslösendes - Körper vom Fahrer verweilt in einer ungeeigneten
Ereignis Position
Ablauf 1. DSM beobachtet Fahrer Haltung (Körperhaltung) Abb. 7. Erfassung des Fahrers in einer fahrzeugführenden Haltung durch
2. Fahrer nimmt ungewöhnliche Haltung an (Körper den Prototyp [Eigene Darstellung]
betritt Warnbereich)
3. DSM erfasst Körper des Fahrers im Warnbereich
4. Fahrzeug alarmiert (Attention, please!), Spur- und
Betritt der grüne Block einen anderen Block vollständig
Abstandsassistent aktiviert (in diesem Beispiel den roten), reagiert der Prototyp darauf.
5. Fahrer Reaktion erwartet (Wiedereintritt des
Körpers in den normalen Fahrhaltung-Bereich)
6. DSM wartet 5 Frames per Second nach Start
„Warnung“ Übergang in „Milder Eingriff“
Alternativen 2b1. Der Fahrer richtet seinen Körper auf die
gewohnte fahr Position
2b2. Der Fahrer schaut wieder auf die Straße
Tabelle 7 Textueller Use Case – Warnung [Eigene Darstellung]
TABELLE VIII. USE CASE – HARTER EINGRIFF
Textuelle Harter Eingriff
Beschreibung
von Use Case
Vorbedingung Abstands-, Spurhaltesystem aktiv, Bremssystem
bereit, Fahrzeug fahrtüchtig, Fahrer fahrunfähig,
Geschwindigkeit > 0 MPH
Nachbedingung - Fahrzeug Startbereit Abb. 8. Erfassung des Fahrers in einer nicht fahrtauglichen Haltung durch
im Erfolgsfall den Prototyp [Eigene Darstellung]
Nachbedingung - Fahrzeug Startbereit
im Misserfolg In diesem Zustand aktiviert der Prototyp den Alarm mit
Akteure Fahrer, Abstandsassistent, Spurhalteassistent, „Attention, please!“, um den Fahrer wieder aufmerksam auf
Bremsassistent, DSM, Fahrzeug
das Fahrgeschehen zu machen und es aktiviert das Spurhalte-
Auslösendes - DSM wartet 3 Frames per Second nach Start
Ereignis „Warnung“ Übergang in „Harter Eingriff“ und den Abstandshalteassistent. Der Fahrer hat je nach
Ablauf 1. Fahrzeug alarmiert (Attention, Emergency!) und Geschwindigkeit 3 bis 5 Frames per Second Zeit, um auf den
Warnblicklichtanlage aktiviert Alarm zu reagieren. Das System kann erkennen, wenn der
2. Bremssystem wird aktiviert bis v = 0 Fahrer wieder eine fahrtaugliche Haltung annimmt und stellt
Tabelle 8 Textueller Use Case – Harter Eingriff [Eigene Darstellung]
den Alarm ein. Geschieht dies nach der festgelegten Zeit
nicht, geht das System in die nächste Eskalationsstufe über.
F. Beschreibung der prototypischen Eskalationsstufen
Verglichen mit der realitätsnahen Eskalationsstufen aus In der Eskalationsstufe „Harter Eingriff“ wird unmittelbar
Kapitel D haben die Autoren beim Prototyp zwei Stufen der Alarm „Attention, Emergency!“ ausgegeben und das
gewählt. Der Fokus bestand darin eine Demonstration zur Bremssystem aktiviert. Das Bremssystem bleibt aktiv bis die
Machbarkeit eines „Sudden Sickness Detection“ Systems Geschwindigkeit v = 0 MPH beträgt und danach deaktiviert
vorzustellen. Die Einschränkung der Hardware und der es sich wieder. Ebenso wechselt der Alarm wieder zum
geringere Erfassungsaufwand (siehe B) machen darüber „Attention, please!“ Signal über. Damit endet die
hinaus weitere Eskalationsstufen funktionell unzureichend. Eskalationsstufe. Der Nutzer kann den Eskalationsprozess
jederzeit durch sein Eingreifen unterbrechen.
In der Eskalationsstufe „Warnung“ erfasst der Prototyp G. Durchführung/Umsetzung des Prototyps
bei einer Geschwindigkeit v > 0 MPH den Körper des
Fahrers. In einer gewöhnlichen, Fahrzeugführenden Haltung Das Ziel des Prototyps ist es zu veranschaulichen welchen
des Fahrers erfolgt der Betrieb des Fahrzeugs gewöhnlich Mehrwert ein kamerabasiertes Assistenzsystem zur
(der Grüne Block zwischen dem roten und blauen Block). Detektion von plötzlichem Unvermögen leisten kann und wie
die grundsätzliche Funktionalität eines solchen Systems
aussehen könnte.
110H. Auswertung
Ziel des Prototyps ist es, zu veranschaulichen wie ein
Fahrerassistenzsystem zur kamerabasierten Erkennung von
plötzlichem Unvermögen konzipiert und gestaltet werden
könnte. Dieser Prototyp hat zu Erkenntnissen geführt, die für
die Entwicklung eins seriöseren Systems wichtig sein
könnten:
• Verwendete Hardware
• Harte Echtzeitanforderungen
• Schnittstellen zu anderen Steuergeräten
1) Verwendete Hardware
Im Falle der Autoren wurde ein Raspberry Pi verwendet
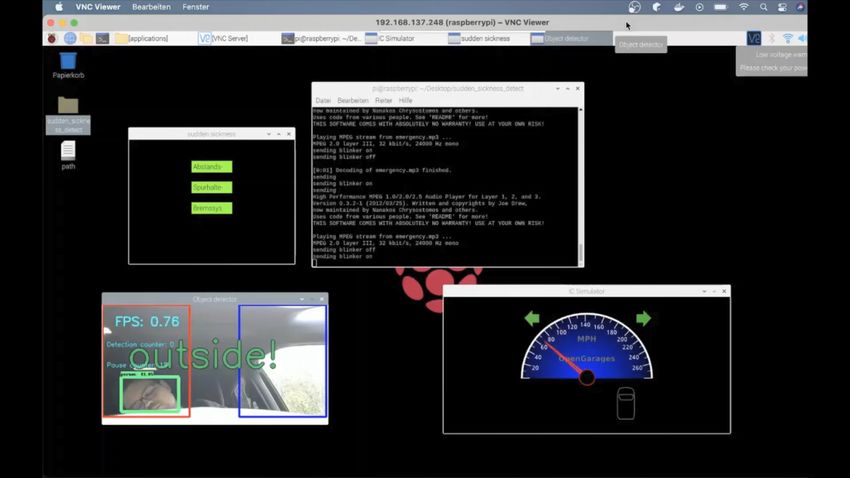
Abb. 9. Bildschirmausschnitt aus dem Raspberry Pi, der Prototyp (Driver an den verschiedenste weitere Geräte angeschlossen wurden.
State Monitoring) im Normalbetrieb (aktiviert). Fahrer in aufrechter
Haltung, hohes Tempo durch Eingabe simuliert. [Eigene Darstellung] Dementsprechend ist es nicht sinnvoll diesen Prototypen als
seriöses System zu betrachten. Die Definition und
Durchführung von Testfällen erübrigten sich der Meinung
der Autoren nach. Es sollte darauf geachtet werden eine
ausreichende Stromversorgung des Rechnerknotens da diese
Anwendung mehrere parallellaufende Prozesse erfordert und
somit die Rechenlast hoch ist.
Der Prototyp verwendet eine gewöhnliche Webcam zur
Detektion der Fahrerhaltung und ob der Fahrer sie einhält.
Umgesetzt wurde dies in einer gut beleuchteten Umgebung.
Für eine verbesserte Iteration des Prototyps kommt in
Betracht für eine stabile und genau Aufzeichnung von
Kopfposition, Augen, Mimik und Köperhaltung eine
Infrarotkamera zu verwenden. Diese kann im Bereich des
Tachos installiert werden, mit dem Risiko von
Abb. 10. Bildschirmausschnitt aus dem Raspberry Pi, der Prototyp (Driver Lenkradstellungen verdeckt zu werden. Mit minimiertem
State Monitoring) im Eskalationsscenario (Harter Eingriff). Fahrer Risiko verdeckt zu werden kann die Kamera im Bereich des
spielt ein plötzliches Unvermögen vor das erkannt wurde. Der Prototyp Rückspiegels als Weitwinkelkamera installiert werden, mit
simuliert den Eingriff von Fahrerassistentzsystemen und bremmst das
Fahrzeug mit aktivierter Warnblinklichtanlage ab.
dem Vorteil alle Fahrzeug Passagiere zu überblicken.
Der Prototyp besteht aus einem zentralen Rechnerknoten 2) Harte Echtzeitanforderungen
(Raspberry Pi), Sensoren (XboX® One S Controller, Logitech Kritisch für dieses System ist es, die Zeitvorgaben
USB Webcam) und Aktoren (JBL®Lautsprecher). Über einen einzuhalten, da sonst ein negativer Nutzen (Schaden)
Kamerasensor wird mittels einem vortrainierten Machine entstehen könnte. Die Verarbeitung der Bilddaten ist
Learning Algorithmus bestimmt welche Rechenintensiv. Dementsprechend kamen die Autoren mit
Position/Körperhaltung der Fahrzeugführer in einem Moment dem Raspberry Pi nur etwa auf ein Bild pro Sekunde. Die
hat und es wird abhängig von weiteren Faktoren (in diesem Verzögerungen, die dadurch entstehen sind für ein solches
Fall Geschwindigkeit des Fahrzeugs) entschieden, ob ein System nicht tragbar.
Eingriff erfolgen soll. Erfolgt ein Eingriff wird, abhängig von Eine Grundvoraussetzung damit die Daten, welche von
der Geschwindigkeit, beispielsweise Warnsignale gegeben, der Kamera aufgezeichnet werden, tatsächlich ausgewertet
Warnblinkanlage eingeschaltet und die Geschwindigkeit werden können ist ein Bilderkennungssystem auf der
gedrosselt. Es können in diesem Zuge auch weitere Softwareseite. Hierzu verwendeten die Autoren TensorFlow.
Assistenzsysteme hinzugenommen werden In der Anwendung identifiziert es ausschließlich Personen
(Spurhalteassistent, Adaptiver Tempomat). und ob diese sich in einem sicheren oder nicht sicheren
Die Powerbank versorgt den Rechnerknoten mit Strom. Bereich aufhalten. Eine Weiterentwicklung des Prototyps
Alle weiteren Elemente erhalten den Strom dann von dem muss nicht nur eine Person identifizieren können sondern
Raspberry. Die USB Cam nimmt Bilder auf mit etwa 4 auch ihre Bewegung und Position von Schultern, Arme,
Frames/ Sekunde und überträgt diese an den Raspberry über Hände und Torso anhand der X und Y-Achse bestimmen. Die
eine USB-Schnittstelle. Der XboX® One S Controller nimmt Neigungen vom Kopf müssen ebenfalls bestimmt werden
die Eingaben des Nutzers entgegen und sendet diese über eine könne. Dazu kommt die Bestimmung von Augenöffnung,
USB-Schnittstelle an den Raspberry. Aus Sicht des Pupillenposition und Zustand, Augenbraun und idealerweise
Rechnerknotens werden diese Signale mittels eines virtuellen Gesichtsfalten (bei verzerrtem Gesichtsausdruck im
CAN Buses weiterverarbeitet. Wenn man noch eine externe Schmerzensfall und Körpertemperaturmessung anhand der
Anzeige hinzunehmen möchte, dann werden diese Daten per Gesichtsverfärbung mit Infrarot Aufnahme).
HDMI versendet. Die Daten an den Lautsprecher werden
mittels AUX versendet.
1113) Schnittstellen zu anderen Steuergeräten sind neben dem Fahrer auch andere Passagiere möglich zu
Die Autoren sind der Ansicht, dass dieser Prototyp ein erkennen.
hohes Potenzial besitzt, nicht zuletzt, weil die Ansteuerung B. Sensorkombinatorik und Ursachebestimmung
und Kommunikation zu anderen Steuergeräten implizit ist. Es
kann schnell und einfach mit anderen Steuergeräten Weiterführende Überlegungen sind die Detektion anderer
Attribute wie bspw. der Puls, durch weitere Sensoren. Mit der
kommuniziert, um die Systemgrenzen zu erweitern und das
Implementation von Apple CarPlay und Android Auto ist die
System zu verbessern. Dazu gehört ein mit Sensoren
Zuhilfenahme von Smartwaches denkbar, um ohne Eingreifen
versehenes Lenkrad damit das Lenkverhalten ausgewertet in den Fahrkomfort den Puls des Fahrers zu ermitteln. Des
werden kann und Hände am Lenkrad detektiert werden Weiteren ist im Eskalationsfall bei der Aktivierung des
können. Zuletzt fehlt dem Prototyp die ADAS automatischen Notrufs die Verwendung der Kameraaufnahme
Funktionalitäten, die verwendet werden, damit im denkbar. Somit kann ein Fachexperte erste Annahme treffen
Eintrittsfall das Fahrzeug autonom und unfallfrei am und diese dem Notfallpersonal mitteilen. Die Autoren haben
Fahrbahnrand angehalten werden kann und Hilfe für den auch die Möglichkeiten der Identifizierung von Arten von
Fahrer sichergestellt wird (Am Fahrbahnrand zum Stopp plötzlichen Unvermögen aufgezeigt und welche zu
kommen und Fahrzeugtüren entriegeln). erfassenden Daten diesen zugewiesen werden können. Bei
weiterer Nachforschung können diese theoretischen Ansätze
Zusammenfassend erfüllte der Prototyp die gegebenenfalls realisiert werden können.
Erwartungshaltung und Ziele der Autoren, im Hinblick auf
die prototypischen Use-Cases. In Gegenüberstellung zu den C. Maßnahmereaktionen des Fahrzeugs
realitätsnahen Use Cases sind die Schwächen ersichtlich. Beim Thema der zu umsetzenden Maßnahmen ist das
Begründet ist dies, durch die Einfachheit der verwendeten DMS System beim Eintreten von plötzlichen Unvermögen des
Hardware. Die gesammelten Erkenntnisse, die durch die Fahrers limitiert. Für eine möglichst hohe
Auswertung und Gegenüberstellung entstanden sind, werden Gefahrenreduzierung sollte das betroffene Fahrzeug
im nächsten Kapitel vorgestellt. selbstständig den Verkehr verlassen können, ohne selbst zu
einer Gefahr oder Hindernis im Straßenverkehr zu werden
VII. OFFENE FRAGESTELLUNGEN/AUSBLICK (Auf dem eigenen Fahrstreifen anhalten, am Fahrbahnrand
Die Folgen eines plötzlichen Unvermögens während der anhalten, an einer Autobahnraststätte oder sicheren
freien Fahrt führen zu weitreichenden Gefahren des Parkmöglichkeit anhalten). Gleichzeitig lässt sich die Frage
betroffenen Fahrers und anderer Verkehrsteilnehmer. Diese identifizieren, wie andere Verkehrsteilnehmer informiert und
Gefahren gilt es im Interesse aller zu vermeiden. Die Euro- motiviert werden können dem temporär autonomen Fahrzeug
NCAP ist mit der Roadmap für 2025 ein weiterer Motivator und den betroffenen Fahrer zu unterstützen. Aktuelle Use-
für die Realisierung eines funktionsfähigen und Cases beschreiben Lenk- und Bremsmanöver, die eine
serienmäßigen “Driver State Monitoring”-Systems mit ungewöhnliche Situation für andere Verkehrsteilnehmer
gefahrenreduzierenden Maßnahmen. Durch Erkennen schaubar machen können [17]. Besondere Signale durch die
plötzlichen Unvermögens und infolgedessen die Ausführung Warnblinklichtanlage seien auch Möglichkeiten, um andere
schadensminimierender Aktionen können diese Gefahren Verkehrsteilnehmer zu informieren [11]. Diskutierbar ist die
verhindert werden. Die Umsetzung benötigt die aktuellsten Verwendung des Infotainmentsystem mit visuellen und
“Advanced Driver Assistance Systems” in Kombination mit auditiven Nachrichten im Fahrzeug. Personen, die dem
dem DSM, das selbst noch in der Entwicklung ist. Die Fahrzeug nahe kommen könnten vom Fahrzeug informiert
Erkennung von plötzlichen Unvermögen und die werden, dass der Fahrer Erste Hilfe benötigt und welchem
darauffolgenden Aktionen stehen Herausforderungen Unvermögen dieser erliegt.
gegenüber, die nachfolgend von den Autoren diskutiert D. Zulassung/Rechtliches
werden. Die Herausforderungen lassen sich in drei Themen
unterteilen. Zusammenhängend mit dem Fahrzeug, welches als
Maßnahme den Verkehr verlassen muss, sind rechtliche
A. Visuelle erkennung Themen. Nicht auszuschließen ist die Frage der Haftung,
Die zuverlässige Erkennung von plötzlichen Unvermögen wenn ein Fahrzeug, dass ohne vom Fahrer geführt wird,
mit dem kamerabasierten System besaßen am vorgestellten selbstständig am Verkehr teilnimmt. Da auch die Gesundheit
Prototypen Verbesserungspotenziale. Durch die Bewertung des Fahrers eine entscheidende Rolle spielt und die
des vorgestellten Prototyps haben die Autoren offene Fragen Identifikation des plötzlichen Unvermögens ein
identifiziert, deren Nachforschung zu einem zielerfüllenden medizinisches Themengebiet ist stellt sich die Frage, ob das
und stabilen DSM System führen kann. System als Medizingerät zugelassen werden muss. Hinzu
würden weitere Anforderungen aus dem Medizinischen
Zu einem empfiehlt sich die Verwendung einer Bereich kommen.
Infrarotkamera, die theoretisch durch geringere Abhängigkeit
von Beleuchtung sich als effizienter bei der Erfassung von Als Sonderausstattung oder Serienausstattung sind DSM
Körper und Gesicht herausstellt. Dies ist wichtig bei einer Systeme bereits in aktuellen Fahrzeugen im Angebot.
Umgebung, wie der Innenraum eines Fahrzeugs. Neben der Innerhalb ihrer unterschiedlichen Systemgrenzen und
Hardware bedarf es auch ein eingelerntes Erkennungssystem, Anwendungsfällen funktionieren sie verschieden und erfüllen
welches (wie in Kapitel VI H) die vielen beschriebenen Daten teils nicht die Euro-NCAP Anforderungen für 2025. Wird eine
zur Körperhaltung und Zustände am Gesicht erfassen kann. Synergie der bisher existierenden Lösungsansätze geschaffen,
die von den Autoren vorgestellt wurden und die offenen
Ebenfalls Thema ist die Platzierung der Kamera. Bei einer Fragestellungen erforscht kann von einer Erfüllung der Euro-
Montage nahe des Kombiinstruments ist es möglich, dass die NCAP Roadmap ausgegangen werden.
Kamera vom Lenkrad verdeckt sein kann. Ist die Platzierung
am Rückspiegel vorteilhafter? Durch eine Weitwinkel Linse
112VIII. REFERENCES
[11] F. Schwarz, R. Decke, Kooperatives Verhalten bei Nothalt-Manövern:
[1] EURO NCAP. (2017, September). Euroncap-roadmap-2025-v4.
Verhaltenswirksamkeit und Verständlichkeit von Anzeigekonzepten
(Vierte Auflage) [Online]. Available:
und Fahrmanövern, BMW Group Forschung und Technik, München,
https://cdn.euroncap.com/media/30700/euroncap-roadmap-2025-
in: VDI-Berichte, S. 327–336, 2011.
v4.pdf [Zugriff am: 08.07.2021]
[2] Klein, H., Krämer, A., Pieske, B. et al. (2010). Fahreignung bei [12] (2014, Oktober 8. und 9.). Datenschutz im Kraftfahrzeug –
Automobilindustrie ist gefordert. [Online]. Available: Datenschutz im
kardiovaskulären Erkrankungen. Kardiologe 4, (441–473) [Online].
Available: https://doi.org/10.1007/s12181-010-0308-9 [Zugriff am: Kraftfahrzeug – Automobilindustrie ist gefordert
08.07.2021] (datenschutzkonferenz-online.de) [Zugriff am: 08.07.2021]
[13] (2016). Datenschutzrechtliche Aspekte bei der Nutzung vernetzter und
[3] Petch MC (on behalf of the task force, 1998) Driving and heart disease.
nicht vernetzter Kraftfahrzeuge. [Online]. Available:
Eur Heart J 19:1165–1177
https://lfd.niedersachsen.de/startseite/themen/weitere_themen_von_a_
[4] Maisel WH (2006) Pacemaker and ICD generator reliability. JAMA z/kfz/kfz-und-datenschutz-148981.html [Zugriff am: 08.07.2021]
295:1929–1934
[14] Kitchenham B., O. Pearl, B., Budgen, D., Turner, M., Bailey, J.,
[5] „Hypoglykämien im Straßenverkehr und Verkehrsunfälle bei Linkman, S. - Systematic literature reviews in software engineering –
Diabetikern unter verschiedenen Diabetestherapien“, Wölfel, S., A systematic literature review, 2008
Universität Erlangen-Nürnberg (2013)
[15] (2021, Februar 12.). Gesetzesentwurf der Bundesregierung, Entwurf
[6] Begutachtungsleitlinien zur Kraftfahreignung, Bundesanstalt für eines Gesetzes zur Änderung des Straßenverkehrsgesetzes und des
Straßenwesen, Bergisch Gladbach, Stand 31. Dezember 2019 Pflichtver-sicherungsgesetzes – Gesetz zum autonomen Fahren.
[7] „Gestaltung eines Notfallassistenzsystems bei medizinisch bedingter [Online] Available: https://dserver.bundestag.de/brd/2021/0155-
Fahrunfähigkeit“ Mirwaldt, P., Bartels, A., To T.-B., Pascheka P. 21.pdf [Zugriff am: 08.07.2021]
[8] „Fahrleistungsrelevante Parameter im Alter“ H. Ehmen, , 2010 [16] (2005, September 6.). Toyota Enchances Pre-crash Safety System With
[9] T. Gasser, C. Arzt, M. Ayoubi, A. Bartels et al., Rechtsfolgen Driver-monitoring Function. [Online]. Available: Toyota Enhances
zunehmender Fahrzeugautomatisierung. BASt-Reihe Pre-crash Safety System With Driver-monitoring Function | Toyota
"Fahrzeugtechnik" BASt-F-83, Wirtschaftsverlag NW - Verlag für Motor Corporation Official Global Website [Zufriff am 14.05.2021]
neue Wissenschaft GmbH, 2012 [17] Emergency Assist [Online]. Available: Emergency Assist |
[10] P. Waldmann, N. Kaempchen, M. Ardelt, F. Homm, Der Volkswagen Newsroom (volkswagen-newsroom.com) [Zugriff am
Nothalteassistent – abgesichertes Anhalten bei plötzlicher 30.05.2021]
Fahrunfähigkeit des Fahrzeugführers, 2010.
113Sie können auch lesen