TECHNISCHE HOCHSCHULE INGOLSTADT - OPUS4
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Technische Hochschule Ingolstadt Fakultät Maschinenbau Studiengang Luftfahrttechnik Bachelorarbeit Thema: Simulation eines Airbus A300 mit Trimmalgorithmen und Flugregler Vor- und Zuname: Maximilian Leopold aufgabenstellende Firma: Airbus Defence & Space GmbH Betreuer: Dr. Ing. Christoph Möller ausgegeben am: 02.11.2020 abgegeben am: Erstprüfer: Prof. Dr.-Ing. Erol Özger Zweitprüfer: Prof. Dr.-Ing. Harald Göllinger 1
Inhaltsverzeichnis Inhaltsverzeichnis ............................................................................................................................................ 2 I. Erklärung ................................................................................................................................................. 4 II. Abstrakt ................................................................................................................................................... 5 III. Nomenklatur ....................................................................................................................................... 5 Abkürzungen ............................................................................................................................................... 5 Formelzeichen ............................................................................................................................................. 6 IV. Abbildungsverzeichnis ......................................................................................................................... 7 V. Literaturverzeichnis ................................................................................................................................. 8 1 Einleitung................................................................................................................................................. 9 2 Flugdynamisches Simulationsmodell ...................................................................................................... 9 2.1 Flugdynamische Grundlagen ........................................................................................................... 9 2.1.1 Koordinatensysteme ............................................................................................................... 9 2.1.1.1 Flugzeugfestes Koordinatensystem..................................................................................... 9 2.1.1.2 Aerodynamisches Koordinatensystem .............................................................................. 10 2.1.1.3 Geodätisches Koordinatensystem ..................................................................................... 11 2.1.1.4 Bahnachsensystem ............................................................................................................ 11 2.1.2 Äußere Kräfte und Momente am Flugzeug ........................................................................... 12 2.1.2.1 Aerodynamische Kräfte und Momente ............................................................................. 12 2.1.2.2 Triebwerkskräfte und Momente ....................................................................................... 13 2.1.2.3 Gravitationskräfte ............................................................................................................. 15 2.1.3 Bewegungsgleichungen ......................................................................................................... 15 2.1.4 Grundlagen der numerischen Integration ............................................................................. 16 2.2 Umsetzung in Simulink .................................................................................................................. 17 2.2.1 Anforderungsanalyse............................................................................................................. 17 2.2.2 Funktionsstruktur .................................................................................................................. 17 2.2.3 Ausarbeitung ......................................................................................................................... 18 2.2.3.1 Zustandsgrößen ................................................................................................................. 18 2.2.3.2 Sensoren und Regler: ........................................................................................................ 19 2.2.3.3 Kräfte- und Momentenbestimmung: ................................................................................ 20 2.2.3.4 6DOF Bewegungsgleichungen: .......................................................................................... 21 2.2.3.5 Trimmalgorithmus ............................................................................................................. 22 2.2.4 Ergebnisse ............................................................................................................................. 23 3 Trimmalgorithmus ................................................................................................................................. 25 3.1 Grundlagen .................................................................................................................................... 25 3.1.1 Was ist Trimmung? ................................................................................................................ 25 3.1.2 Mathematische Grundlagen (Newton-Raphson-Verfahren) ................................................. 26 2
3.1.3 Flugmechanische Grundlagen (Trimmfälle) .......................................................................... 27 3.1.3.1 Gleitflug [nicht Schiebewinkelfrei] .................................................................................... 28 3.1.3.2 Stationärer Steig- oder Sinkflug [nicht Schiebewinkelfrei]................................................ 29 3.1.3.3 Koordinierter Kurvenflug ................................................................................................... 29 3.2 Umsetzung in Simulink .................................................................................................................. 30 3.2.1 Anforderungsanalyse............................................................................................................. 30 3.2.2 Funktionsstruktur .................................................................................................................. 30 3.2.3 Ausarbeitung ......................................................................................................................... 31 3.2.4 Ergebnisse ............................................................................................................................. 41 4 Flugregler/Autopilot .............................................................................................................................. 46 4.1 Grundlagen .................................................................................................................................... 46 4.1.1 Merkmale der Flugregelung .................................................................................................. 46 4.1.2 Aufbau von Flugregelungssystemen ..................................................................................... 46 4.2 Umsetzung in Simulink .................................................................................................................. 47 4.2.1 Anforderungsanalyse............................................................................................................. 47 4.2.2 Funktionsstruktur .................................................................................................................. 48 4.2.3 Detaillösungen....................................................................................................................... 48 4.2.3.1 Flugzustandsregelung ........................................................................................................ 48 4.2.3.2 Flugbahnregelung .............................................................................................................. 51 4.2.4 Ergebnisse ............................................................................................................................. 55 5 Zusammenfassung und Ausblick ........................................................................................................... 57 6 Anhang .................................................................................................................................................. 58 6.1 ISA-Tabelle ((Brockhaus, Alles und Luckner, 2011, S. 904)) .......................................................... 58 6.2 Gesamtschaltbild Simulation ......................................................................................................... 59 6.3 Gesamtschaltbild Trimmalgorithmus ............................................................................................ 60 3
I. Erklärung Ich erkläre hiermit, dass ich die Arbeit selbständig verfasst, noch nicht anderweitig für Prüfungszwecke vorgelegt, keine anderen als die angegebenen Quellen oder Hilfsmittel benützt sowie wörtliche und sinngemäße Zitate als solche gekennzeichnet habe. Ingolstadt, _______________ (Datum) ________________________ (Unterschrift) Vorname, Name 4
II. Abstrakt Im Rahmen dieser Arbeit wird ein Trimmalgorithmus sowie ein vereinfachtes FCS-Modell in Simulink aufgebaut. Beide Modelle sollen final in eine UAV Gesamtflugzeugsimulation integriert werden und eine modellbasierte Flugzeugentwicklung unterstützen. Da die modelspezifischen Aspekte des UAVs der Geheimhaltung unterliegen, werden diese in dieser Arbeit nicht näher erläutert. Aus diesem Grund wird zunächst eine vereinfachte flugmechanische Simulation des Flugzeuges Airbus A300 auf Basis von Derivativen aus dem Brockhaus Flugregelung1 entwickelt, an deren Beispiel der Trimmalgorithmus und der Autopilot/Flugregler umgesetzt werden. Die Simulation des Flugverhaltens des A300 hat nicht den Anspruch in jedem Flugbereich die reale Dynamik exakt abzubilden, sondern dient vornehmlich als Hilfsmittel für die in dieser Arbeit erforderlichen Entwicklungsaktivitäten. Als Konsequenz müssen sowohl der Trimmalgorithmus als auch das Flugreglermodell zusätzlich in einer nichtlinearen, flugdynamischen Simulation getestet werden. Der Trimmalgorithmus ermöglicht den Start der Simulation in einem von drei stationären Flugzuständen. Diese Zustände sind: 1. stationärer Gleitflug mit konstanter Geschwindigkeit (nicht schiebewinkelfrei) 2. stationärer Steig- oder Sinkflug mit konstanter Geschwindigkeit (nicht schiebewinkelfrei) 3. koordinierter Kurvenflug mit konstanter Geschwindigkeit (schiebewinkelfrei) Der Trimmalgorithmus basiert dabei auf dem mehrdimensionalen Newton-Verfahren. Das Reglermodell wird bis zum Level eines einfachen, rein flugzeuggestützten Autopiloten aufgebaut. Abweichungen beim Schließen des Regelkreises, die beispielsweise durch Effekte bei der Signalgenerierung in Sensoren erfolgen, werden vernachlässigt. Außerdem werden die geläufigen Zertifizierungs-Standards für die Entwicklung von Flugregelungssystemen nicht als Grundlage für die Entwicklung genutzt, stattdessen soll vielmehr das Grundprinzip eines Autopiloten funktionsfähig in einer Simulation umgesetzt werden. III. Nomenklatur Abkürzungen BPR ............................................................................................................................................... Bypass Ratio FCS ................................................................................................................................... Flight Control System Ma ..................................................................................................................................................... Machzahl MTOW ..................................................................................................................... Maximum Takeoff Weight UAV................................................................................................................................ Unmanned Air Vehicle WGS84 .................................................................................................................World Geodetic System 1984 1 Brockhaus, Alles und Luckner 5
Formelzeichen ⃗ Vektor der aerodynamischen Kräfte ⃗ Vektor der Gravitationskräfte ⃗ Vektor der Triebwerkskräfte FSchub maximale Schubkraft FStandschub Standschubkraft Fx Kraft in x-Richtung Fy Kraft in y-Richtung Fz Kraft in z-Richtung ̅ Trägheitstensor L Rollmoment M Nickmoment ⃗ ⃗⃗ Vektor der aerodynamischen Momente ⃗⃗⃗ Vektor der Triebwerksmomente N Giermoment nz Lastfaktor p Rollrate q Nickrate Kurvenradius r Gierrate u Geschwindigkeit in x-Richtung V Gesamtgeschwindigkeit ⃗ Geschwindigkeitsvektor der körperfesten Geschwindigkeiten v Geschwindigkeit in y-Richtung VSteig Steiggeschwindigkeit VTAS True Air Speed w Geschwindigkeit in z-Richtung Gravitationskonstante Masse Nickwinkel Rollwinkel Gierwinkel Anstellwinkel Schiebewinkel Bahnwinkel Schubhebelstellung Seitenruderausschlag Höhenruderausschlag Querruderausschlag Luftdichte Luftdichte auf Meereshöhe bei Standardbedingungen Kurs ⃗⃗⃗ Vektor der Drehraten 6
IV. Abbildungsverzeichnis Abbildung 1: flugzeugfestes Koordinatensystem .......................................................................................... 10 Abbildung 2: Aerodynamische Größen in flugzeugfesten Koordinaten ........................................................ 10 Abbildung 3: Transformationsmatrix von aerodynamischen in flugzeugfeste Koordinaten ........................ 10 Abbildung 4: geodätische und flugzeugfeste Koordinaten ........................................................................... 11 Abbildung 5: Transformationsmatrix von geodätischen in flugzeugfeste Koordinaten................................ 11 Abbildung 6: Bahngeschwindigkeitsvektor in erdlotfesten Koordinaten...................................................... 12 Abbildung 7: Transformationsmatrix von erdlotfesten in bahnfeste Koordinaten....................................... 12 Abbildung 8: Tabelle der Einflussfaktoren für die Berechnung des Schubes nach Howe ............................. 14 Abbildung 9: Phasendiagramm des Schubverlaufs ....................................................................................... 14 Abbildung 10: Kräftegleichgewicht im Schwerpunkt .................................................................................... 15 Abbildung 11: Momentengleichgewicht um den Schwerpunkt .................................................................... 15 Abbildung 12: Anforderungen des flugdynamischen Modells ...................................................................... 17 Abbildung 13: Funktionsstruktur der Simulation mit Trimmalgorithmus und Regler................................... 17 Abbildung 14: Gesamtschaltbild in Simulink ................................................................................................. 18 Abbildung 15: Blockschaltbild der Zustandsgrößen in Simulink ................................................................... 18 Abbildung 16: Blockschaltbild der Böenmodellierungen .............................................................................. 19 Abbildung 17: Blockschaltbild der Steuergrößen in Simulink ....................................................................... 20 Abbildung 18: Blockschaltbild der Kräfte- und Momentenbestimmung in Simulink .................................... 20 Abbildung 19: Blockschaltbild der Bewegungsgleichungen in Simulink ....................................................... 21 Abbildung 20: Blockschaltbild der Integration des Trimmalgorithmus......................................................... 22 Abbildung 21: Nickrate - Höhenruder ........................................................................................................... 23 Abbildung 22: Phygoide im ungetrimmten Zustand ..................................................................................... 23 Abbildung 23: exemplarischer Flugpfad unter verschiedenen Windverhältnissen ...................................... 24 Abbildung 24: Anforderungen Trimmalgorithmus ........................................................................................ 30 Abbildung 25: Funktionsstruktur des Trimmalgorithmus ............................................................................. 31 Abbildung 26: Gesamtblockschaltbild Trimmalgorithmus ............................................................................ 31 Abbildung 27: Blockschaltbild der Startwerte und Bildung des nächsten Iterationspunktes ....................... 32 Abbildung 28: Blockschaltbild der Iterationsschleife .................................................................................... 32 Abbildung 29: Blockschaltbild der festen Randbedingungen ....................................................................... 33 Abbildung 30: festgelegter Startwert im eindimensionalen Newton-Verfahren .......................................... 33 Abbildung 31: Blockschaltbild der Bestimmung des Funktionsvektors am Arbeitspunktvektor .................. 34 Abbildung 32: Funktionswert im eindimensionalen Newton-Verfahren ...................................................... 35 Abbildung 33: Jacobimatrix für den Trimmfall Gleitflug ............................................................................... 35 Abbildung 34: Blockschaltbild der Bestimmung des Variationsvektors zur Ermittlung der Jacobi-Matrix ... 36 Abbildung 35: Variation des Arguments zur Näherung der Steigung beim eindimensionalen Newton- Verfahren ...................................................................................................................................................... 37 Abbildung 36: Jacobi Approximation Blockschaltbild ................................................................................... 38 Abbildung 37: Approximation der Steigung beim eindimensionalen Newton-Verfahren ............................ 39 Abbildung 38: Bestimmung von als Blockschaltbild ............................................................................ 40 Abbildung 39: Höhe und Geschwindigkeit im getrimmten und ungetrimmten Zustand .............................. 41 Abbildung 40: Phygoide des getrimmten und ungetrimmten Systemes ...................................................... 42 Abbildung 41: exemplarische Flugpfade unter verschiedenen Windeinflüssen ........................................... 43 Abbildung 42: Flugpfad der drei umgesetzten Trimmfälle ........................................................................... 44 Abbildung 43: Flugpfad des getrimmten Kurvenfluges mit verschiedenen Abbruchkriterien für die Iteration ....................................................................................................................................................................... 44 Abbildung 44: Reglerebenen nach Brockhaus............................................................................................... 46 Abbildung 45: Anforderungen für den Regler/Autopiloten .......................................................................... 47 Abbildung 46: Blockschaltbild der Dämpferebene........................................................................................ 48 7
Abbildung 47: Blockschaltbild des Lagereglers ............................................................................................. 49 Abbildung 48: Blockschaltbild des Lagereglers mit Kurvenkompensation und -koordinierung ................... 50 Abbildung 49: Blockschaltbild der Höhenregelung ....................................................................................... 50 Abbildung 50: Abnahme von VTAS im Steigflug .............................................................................................. 51 Abbildung 51: Blockschaltbild des Lagereglers mit speed-by-pitch-Regelung .............................................. 52 Abbildung 52: Blockschaltbild des modifizierten Geschwindigkeitsreglers .................................................. 52 Abbildung 53: Vergleich des Verlaufes von VTAS im Steigflug mit modifiziertem Regler .............................. 53 Abbildung 54: Angepasstes Blockschaltbild der Höhenregelung .................................................................. 53 Abbildung 55: modifiziertes Blockschaltbild der -Regelung ....................................................................... 54 Abbildung 56: Flugpfade für getrimmten und geregelten Kurvenflug .......................................................... 55 Abbildung 57: Horizontalflug unter Wind- und Böeneinfluss ....................................................................... 55 Abbildung 58: Höhenverlauf ungetrimmt, getrimmt und geregelt............................................................... 56 Abbildung 59: Exemplarischer Flugpfad mit mit Sink- und Kurvenflug ......................................................... 56 V. Literaturverzeichnis Literatur BROCKHAUS, R., W. ALLES und R. LUCKNER, 2011. Flugregelung. 3., neu bearb. Aufl. Heidelberg: Springer. ISBN 978-3-642-01442-0. FLORIAN HOLZAPFEL. Vorlesungsskript Flugregelung 1. Koordinatensysteme und Transformationen. GAULL, A., 2020. Vorlesungsskript Modellierung und Simulation mechanischer Systeme. Kapitel 4: Numerische Integration. HOWE, D., 2000. Aircraft Conceptual Design Synthesis. Chichester, UK: John Wiley & Sons, Ltd. ISBN 9781118903094. MATHWORKS. Solving ODEs in MATLAB. Classical Runge-Kutta, ODE4 [online] [Zugriff am: 20. Dezember 2020]. Verfügbar unter: https://de.mathworks.com/videos/solving-odes-in-matlab-3-classical-runge-kutta-ode4- 117528.html 8
1 Einleitung In der Luftfahrtindustrie gewinnt die Simulation von Komponenten und vollständigen Systemverbunden während des gesamten Produktlebenszyklus eine immer größere Bedeutung. Die Airbus Defence & Space GmbH entwickelt derzeit ein neues UAV der Klasse C (multi-engine, MTOW 5700kg – 14 000kg) in stabiler Konfiguration. Im Rahmen dieses Programmes soll auch ein detailliertes Simulationsmodell des gesamten Flugzeugsystems erarbeitet werden, welches u.a. auch das flug- und bodendynamische Verhalten abbildet. Um zeitnah das modellbasierte Testen noch in der Entwicklung befindlicher Komponenten zu ermöglichen, soll im Rahmen dieser Arbeit ein Modell eines Flugregelungssystems entwickelt werden, welches das Abfliegen einfacher Flugprofile, ähnlich einem rein flugzeuggestützten Autopiloten, ermöglicht. Damit soll auch die Entwicklung eines Autopilotenmodells vorbereitet werden, welches die Flugbahnführung mithilfe von Wegpunkten und die Durchführung selbstständiger Start- und Landevorgänge ermöglicht. Um das Simulationsmodell in der Luft mit variierenden Anfangsbedingungen starten zu können wird zudem ein Algorithmus benötigt, der die Initialisierung der Simulation in einem stationären Flugzustand ermöglicht. Dieser Algorithmus soll somit eine kräfte- und momentenbasierte dreidimensionale Trimmung des Flugzeuges durchführen. Da jegliche Informationen zur Flugmechanik des UAVs der Geheimhaltung unterliegen, wird in dieser Arbeit zunächst eine vereinfachte Simulation des Flugzeuges Airbus A300 umgesetzt, anhand derer die Entwicklung des Trimmalgorithmus und des Flugreglermodells veranschaulicht werden soll. 2 Flugdynamisches Simulationsmodell Im folgenden Kapitel sollen die grundlegenden Überlegungen bezüglich der Regelstrecke und darauffolgend die Implementierung dieser in einem flugdynamischen Simulationsmodell beschrieben werden. Dieses Simulationsmodell wird anschließend als Grundlage für die in Kapitel 3 und in Kapitel 4 beschriebenen Entwicklungstätigkeiten verwendet. Als Basis für das Modell dient ein Datensatz des Airbus A300 zur 1-Punkt aus „Brockhaus – Flugregelung“2 . Dabei handelt es sich um eine vereinfachte, linearisierte Darstellung, die für die Entwicklung des Trimmalgorithmus und des Reglermodells als hinreichend detailliert betrachtet wird. 2.1 Flugdynamische Grundlagen 2.1.1 Koordinatensysteme Für die adäquate Beschreibung der Flugzustandsgrößen und der auftretenden Kräfte und Momente ist die Darstellung in einem geeigneten Koordinatensystem notwendig. Die Ermittlung der aerodynamischen Kräfte sollte beispielsweise in einem aerodynamischen Koordinatensystem erfolgen. Die Beschreibung der Flugzeuglage sollte in einem geodätischen Koordinatensystem erfolgen, um unter anderem direkt die Eulerwinkel bestimmen zu können. Für Zwecke der Navigation ist hingegen das Bahnachsensystem essenziell wohingegen die Beschreibung der Position im WGS84 Bezugssystem erfolgt. Alle diese Koordinatensysteme sowie die korrespondierenden Transformationen sollen im Folgenden genauer vorgestellt werden. 2.1.1.1 Flugzeugfestes Koordinatensystem Das flugzeugfeste Koordinatensystem ist ein beschleunigt bewegtes Koordinatensystem, das seinen Ursprung im Schwerpunkt des Flugzeuges hat. Die x-Achse ist in Richtung der Flugzeugnase als positiv definiert, die z-Achse ist in Richtung der Unterseite des Flugzeuges als positiv festgelegt. Gemeinsam mit der y-Achse bildet sich so ein Rechtssystem.3 2 Brockhaus, Alles und Luckner (2011, S. 902). 3 Florian Holzapfel . 9
Abbildung 1: flugzeugfestes Koordinatensystem4 In diesem Koordinatensystem werden die Gesamtkräfte und Momente angegeben, mit denen die Bewegungsgrößen ermittelt werden. Außerdem werden die dreidimensionalen Bewegungsgleichungen in diesem Koordinatensystem beschrieben. 2.1.1.2 Aerodynamisches Koordinatensystem Das aerodynamische Koordinatensystem ist ebenfalls ein beschleunigt bewegtes Koordinatensystem, der Ursprung liegt ebenfalls im Flugzeugschwerpunkt. Die x-Achse zeigt hier jedoch in Richtung der Anströmgeschwindigkeit und bildet wieder mit der z-Achse, die in Richtung der Flugzeugunterseite in der Symmetrieebene des Flugzeuges liegt, und der y-Achse ein Rechtssystem.5 Abbildung 2: Aerodynamische Größen in flugzeugfesten Koordinaten6 Gegenüber dem flugzeugfesten Koordinatensystem ist die x-Achse um α in der xz-Ebene und um β in der xy-Ebene gedreht. Daraus ergibt sich folgende Transformation vom flugzeugfesten ins aerodynamische Koordinatensystem: Abbildung 3: Transformationsmatrix von aerodynamischen in flugzeugfeste Koordinaten 7 4 Brockhaus, Alles und Luckner (2011, S. 10). 5 Florian Holzapfel . 6 Brockhaus, Alles und Luckner (2011, S. 61). 7 Brockhaus, Alles und Luckner (2011, S. 62). 10
Dieses Koordinatensystem ist Basis für die Bestimmung der aerodynamischen Kräfte und Momente mithilfe der 1-Punkt Modellierung aus dem Brockhaus. Außerdem werden aerodynamisch relevante Größen wie True Airspeed (VTAS), Anstellwinkel ( ) oder Schiebewinkel ( ) in diesem System ermittelt. 2.1.1.3 Geodätisches Koordinatensystem Das geodätische Koordinatensystem, welches auch als NED-System (North, East, Down) bezeichnet wird, ist ein beschleunigt bewegtes Koordinatensystem, in dem die Lage des Flugzeugs in einem euklidischen Ersatzraum für das gekrümmte Erdkoordinatensystem angegeben wird. Dabei zeigen die N-Achse nach Norden und die E-Achse nach Osten. Beide liegen dabei in einer Ebene parallel zu einer Tangentialebene an die Erdoberfläche. Die D-Achse zeigt nach unten, senkrecht auf die Tangentialebene zur Erdoberfläche. Es handelt sich ebenfalls um ein Rechtssystem.8 Abbildung 4: geodätische und flugzeugfeste Koordinaten9 Die Winkel zwischen einer zur Erdoberfläche parallelen Ebene und der flugzeugfesten x-Achse wird als Theta ( ) bezeichnet. Der Winkel zwischen dieser Ebene und der flugzeugfesten y-Achse wird mit Phi ( ) und der Winkel zwischen der Projektion der flugzeugfesten x-Achse auf die parallele Ebene und der N- Achse wird mit Psi ( ) bezeichnet. , und werden auch als Eulerwinkel bezeichnet. Abbildung 5: Transformationsmatrix von geodätischen in flugzeugfeste Koordinaten 10 In diesem Koordinatensystem wird die Lage des Flugzeuges bezüglich der Erdoberfläche an. 2.1.1.4 Bahnachsensystem Das Bahnachsensystem, welches auch als flugbahnfestes Koordinatensystem bezeichnet wird, ist ein beschleunigt bewegtes Koordinatensystem, in dem die x-Achse die Richtung der Flugbahn vorgibt. Die y- Achse liegt in der zur Erdoberfläche parallelen Ebene und bildet zusammen mit der z-Achse ein rechtshändiges Koordinatensystem.11 8 Florian Holzapfel . 9 Brockhaus, Alles und Luckner (2011, S. 57). 10 Brockhaus, Alles und Luckner (2011, S. 57). 11 Brockhaus, Alles und Luckner (2011, S. 58–60). 11
Abbildung 6: Bahngeschwindigkeitsvektor in erdlotfesten Koordinaten 12 Abbildung 7: Transformationsmatrix von erdlotfesten in bahnfeste Koordinaten 13 2.1.2 Äußere Kräfte und Momente am Flugzeug Zur Bestimmung der Bewegung des Flugzeuges benötigen wir die am Schwerpunkt angreifenden Kräfte und Momente. Die sich ergebenden Kräfte charakterisieren auch das Flugmuster. Dabei werden in dieser Arbeit folgende Vereinfachungen angenommen14 : 1. Die Erde ist ruhend und eben ist. Somit sind alle erdfesten Koordinatensysteme Inertialsysteme und es wirkt keine Zentrifugalkraft oder Corioliskraft beim Flug auf einer konstanten Umlaufbahn um die Erde. Dies ist bei den im Reiseflug auftretenden Geschwindigkeiten in Anbetracht des großen Radius der Flugbahn zulässig. 2. Das Flugzeug ist vollkommen starr und es treten keine Verformungen auf 3. Die Flugzeugmasse und deren Verteilung ist konstant 4. Das Flugzeug ist zur xz-Ebene symmetrisch 5. Der Drall der Triebwerke wird vernachlässigt 6. Alle Kräfte werden auf den Flugzeugschwerpunkt bezogen 7. Die Aerodynamik wird als stationär angenommen 8. Der Einfluss des Schubstrahls des Triebwerks auf die Aerodynamik wird vernachlässigt 9. Wechselwirkungen zwischen der Erdoberfläche und der Flugzeugumströmung werden ebenfalls vernachlässigt Zusätzlich beschränkt sich diese Arbeit auf reine Flugzustände, deshalb werden Wechselwirkungen des Fahrwerkes mit dem Boden in diesem Kapitel nicht beschrieben. 2.1.2.1 Aerodynamische Kräfte und Momente Die Berechnungsgrundlage für die aerodynamischen Kräfte und Momente kann beliebig kompliziert gewählt werden. Grundsätzlich beruht die Berechnung der aerodynamischen Kräfte auf im Allgemeinen nicht konstanten Koeffizienten, die z.B. durch Strömungssimulation oder Laborversuche ermittelt werden können. Für eine in jedem Flugzustand möglichst genaue Abbildung der Wirklichkeit wäre somit ein 12 Brockhaus, Alles und Luckner (2011, S. 58). 13 Brockhaus, Alles und Luckner (2011, S. 58). 14 Brockhaus, Alles und Luckner (2011, S. 205–206). 12
wesentlich größerer Datensatz als der im Rahmen dieser Arbeit zur Verfügung stehende notwendig. Die Zielsetzung dieser Arbeit soll jedoch nicht die vollumfassende, realitätsnahe Umsetzung einer Flugzeugsimulation in jedem Flugzustand sein, sondern vielmehr die Entwicklung eines funktionierenden, erweiterbaren flugdynamischen Modells als Basis für die beispielhafte Entwicklung eines Flugreglers. Aus diesem Grund wird im Rahmen dieser Arbeit ein lineares 1-Punkt Aerodynamikmodell basierend auf Beiwerten aus „Brockhaus-Flugregelung“15 umgesetzt. Dieses Modell ist nur für den Punkt gültig, an dem es linearisiert wurde, weshalb auch das simulierte Flugverhalten in Folge nur um diesen Punkt eine realistische Umsetzung des Flugverhaltens eines A300 darstellt. Das flugdynamische Simulationsmodell und der Trimmalgorithmus sollen so ausgelegt werden, dass das Aerodynamik Modell jederzeit durch akkurateres Modell, z.B. abgeleitet aus Flugversuchsdaten oder mehrdimensionalen lookup-tables für die Derivative, ersetzt werden kann. Unabhängig davon ergeben sich die Kräfte und Momente im aerodynamischen System wie in Abbildung 2 dargestellt. Als Eingangsgrößen für die Kräfte- und Momentenermittlung dienen aerodynamische Größen, Bewegungsgrößen und Steuergrößen. Für die hier umgesetzte Modellierung sind folgende Größen relevant. Aerodynamische Größen , ̇ Anstellwinkel Schiebewinkel pdyn Staudruck Bewegungsgrößen p,q,r körperfeste Drehraten Steuergrößen Höhenruderausschlag Querruderausschlag Seitenruderausschlag Im Allgemeinen sind die aerodynamischen Kräfte nicht nur von den oben aufgeführten Größen abhängig, so können zum Beispiel auch zusätzlich Derivative für Klappen oder weitere aerodynamische Größen wie ̇ vorhanden sein. Der hier betrachtete Datensatz beinhaltet allerdings nur die oben tabellarisch aufgeführten Abhängigkeiten, weshalb u.a. die Klappen des A300 nicht betrachtet werden können. Die Steuergrößen sind in ihrem Wertebereich beschränkt und unterliegen einem Übertragungsverhalten aufgrund ihrer Aktuatoren. Dies wird vereinfacht als PT1-Verhalten genähert. 2.1.2.2 Triebwerkskräfte und Momente Im Rahmen der hier vorgestellten Arbeit wird – zusätzlich zur Vernachlässigung des Dralls - angenommen, dass der Schubvektor nur in flugzeugfeste x-Richtung verläuft. Für die Momente bedeutet dies, dass nur Nickmomente um die y-Achse und Giermomente um die z-Achse erzeugt werden können, abhängig vom angenommenen Hebelarm. Dabei dient als einzige Eingangsgröße bzw. Steuergröße ein prozentuales Schubkommando , das im später in dieser Arbeit generierten Regler generiert wird. Das prozentuale Schubsignal ergibt zusammen mit dem Maximalschub des Triebwerks den Betrag des Schubvektors. Da sich die Triebwerksposition nicht im Schwerpunkt des Flugzeuges befindet ergeben sich wie zuvor erwähnt Momente um y-Achse und, bei asymmetrischen Schubkommandos, auch um die z-Achse. Der angenommene Standschub wurde analog zur Aerodynamik aus dem Brockhaus entnommen. Der verfügbare Maximalschub ist in der Realität abhängig von der Höhe und der Fluggeschwindigkeit. Da die Derivative aus der Aerodynamik auch lediglich am Punkt ihrer Linearisierung gültig sind, ist es auch ausreichend den verfügbaren Maximalschub am Linearisierungspunkt der Derivative für die Simulation zu 15 Brockhaus, Alles und Luckner (2011, S. 902). 13
verwenden. Der Triebwerksschub kann nach Howe durch folgende Formel in Abhängigkeit von Nebenstromverhältnis (BPR), Machzahl (Ma) und Dichteverhältnis ( ) genähert werden: 0 ℎ = ( 1 + 2 ∗ + ( 3 + 4 ∗ ) ∗ ) ∗ ( ) ℎ 0 2.116 Dabei sind die Parameter k1 bis k4, sowie Q folgender Tabelle zu entnehmen: Abbildung 8: Tabelle der Einflussfaktoren für die Berechnung des Schubes nach Howe 17 Mit dieser Näherungsformel könnte zwar auch ein höhen- und geschwindigkeitsabhängiges Schubmodell umgesetzt werden, da der hier umgesetzte Aerodynamik-Datensatz allerdings den Gültigkeitsbereich der Simulation ohnehin einschränkt ist ein konstanter Wert ausreichend. Das Übertragungsverhalten des Triebwerks soll für diese Arbeit als einfaches Ersatzmodell in Form eines modifizierten linearen Systems erster Ordnung umgesetzt werden. Als Modellgrundlage dient dabei die Näherung des dynamischen Triebwerksverhaltens mittels eines Phasendiagramms. Damit werden die maximalen Änderungsraten des Schubes ̇ in Abhängigkeit des momentanen Schubes durch Geradenstücke genähert.18 Abbildung 9: Phasendiagramm des Schubverlaufs19 Damit wird eine Ratenlimitierung für das PT1-Verhalten umgesetzt, die die maximal möglichen Schubänderungen in den verschiedenen Betriebsbereichen vorgibt.20 16 Howe (2000) 17 Howe (2000). 18 Brockhaus, Alles und Luckner (2011, S. 161). 19 Brockhaus, Alles und Luckner (2011, S. 161). 20 Brockhaus, Alles und Luckner (2011, S. 162). 14
2.1.2.3 Gravitationskräfte Aufgrund der Betrachtung des Flugzeuges als Massenpunkt verursacht die Gravitation lediglich Kräfte. Dabei wird in dieser Arbeit unabhängig von der Flugzeugposition eine konstante Erdbeschleunigung angenommen, da eine genaue Modellierung des Gravitationsfeldes der Erde den Rahmen der Arbeit übersteigen würde. Das spätere Einfügen eines positionsabhängigen Gravitationsmodells wird allerdings bei der Implementierung berücksichtigt (siehe Kapitel 2.2.3.1). 2.1.3 Bewegungsgleichungen Aus den äußeren Kräften und Momenten um den Schwerpunkt sollen nun die Zustandsgrößen Beschleunigung, Geschwindigkeit und Lage ermittelt werden. Die Grundlage für die Bestimmung der Bewegungsgrößen sind die Bewegungsdifferentialgleichungen. Abbildung 10: Kräftegleichgewicht im Schwerpunkt21 Abbildung 11: Momentengleichgewicht um den Schwerpunkt 22 Mit den vorhandenen Grundlagen der Kräfte und Momente aus dem vorherigen Kapitel steht die rechte Seite dieser Gleichungen bereits fest. Diese Kräfte und Momente (und damit die Beschleunigungen) sind allerdings von Geschwindigkeit und Lage des Flugzeuges abhängig, es handelt sich somit um ein Differentialgleichungssystem. In dieser Arbeit werden die Bewegungsdifferentialgleichungen im flugzeugfesten Koordinatensystem betrachtet, wie üblich für flugdynamische Untersuchungen23. Dies führt zu: ⃗ ⃗ = ∗( + ⃗ ) = + + ⃗ × 2.2 und ⃗ ⃗ ̅ = ̅ + ̅⃗ = ⃗ × ⃗⃗ + ⃗⃗ 2.3 mit ⃗ = ( ) ⃗ = ( ) ̅ = ( ) 2.4 21 Brockhaus, Alles und Luckner (2011, S. 206). 22 Brockhaus, Alles und Luckner (2011, S. 206). 23 Brockhaus, Alles und Luckner (2011, S. 207–208). 15
Mit Hilfe der Masse bzw. des Trägheitstensors können nun – bei bekannten äußeren Kräften und Momenten - direkt die rotatorischen und translatorischen Beschleunigungen bestimmt werden. Im Simulationsmodell findet dies durch numerische Integration zu jedem Zeitschritt statt. ⃗ ̇ 1 = ( ̇ ) = ( + + − ∗ ( ⃗ )) ⃗ × ̇ 2.5 ⃗ ̇ = ( ̇ ) = −̅ 1 ( ⃗⃗ + ⃗⃗ − ( ̅ ⃗ )) ⃗ × ̇ 2.6 Es können somit für jeden diskreten Zeitpunkt aufbauend auf den Beschleunigungen durch numerische Integration und Koordinatentransformationen die Geschwindigkeiten und Positionen in den für die Luftfahrt üblichen Koordinatensystemen ermittelt werden. 2.1.4 Grundlagen der numerischen Integration Die oben erarbeiteten Gleichungen 2.5 und 2.6 stellen ein System gewöhnlicher Differentialgleichungen der Form ̇ = ( , ) dar. Bei der numerischen Lösung solcher Gleichungen werden Näherungslösungen für diskrete Zeitpunkte mit 0 < < berechnet.24 Für die Näherung gibt es eine Vielzahl verschiedener Lösungsansätze mit charakteristischen Vor- und Nachteilen, hier soll nur das Grundprinzip anhand der Einschrittverfahren zum besseren Verständnis beleuchtet werden. Hier wird der nächste Integrationsschritt ausschließlich auf Basis der vorherigen Näherung ermittelt. Dazu wird die Differentialgleichung mit einer linearen Gleichung approximiert.25 ( + ) = ( ) + ( + − ) ∗ ( , + , ( ), ( + )) 2.7 Dabei wird ( , +1 , ( ), ( +1 )) als Verfahrensfunktion bezeichnet. Diese Gleichung muss nun nach ( +1 ) aufgelöst werden, um den nächsten Zeitschritt zu berechnen. Hierfür gibt es verschiedene numerische solver, welche in explizite und implizite solver eingeteilt werden. Bei impliziten solvern stellt die obige Verfahrensfunktion eine Funktion von ( +1 ) dar, was Gleichung 2.7 nicht explizit darstellbar macht wohingegen bei expliziten solvern keine Funktion von ( +1 ) ist, wodurch die obige Gleichung direkt explizit gelöst werden kann.26 Das in der hier präsentierten Arbeit genutzte Verfahren ist ein Runge-Kutta-Verfahren vierter Ordnung (ode4). Dabei wird als gewichteter Mittelwert aus vier Stützstellen gebildet.27 1 = ( 1 + 2 2 + 2 3 + 4 ) 6 mit 1 = ( , ), Δ = ( +1 − ) Δ Δ 2 = ( + , + ∗ 1 ) 2 2 Δ Δ 3 = ( + , + ∗ 2 ) 2 2 4 = ( + Δ , + Δ ∗ 3 ) 24 Gaull (2020). 25 Gaull (2020). 26 Gaull (2020). 27 MathWorks . 16
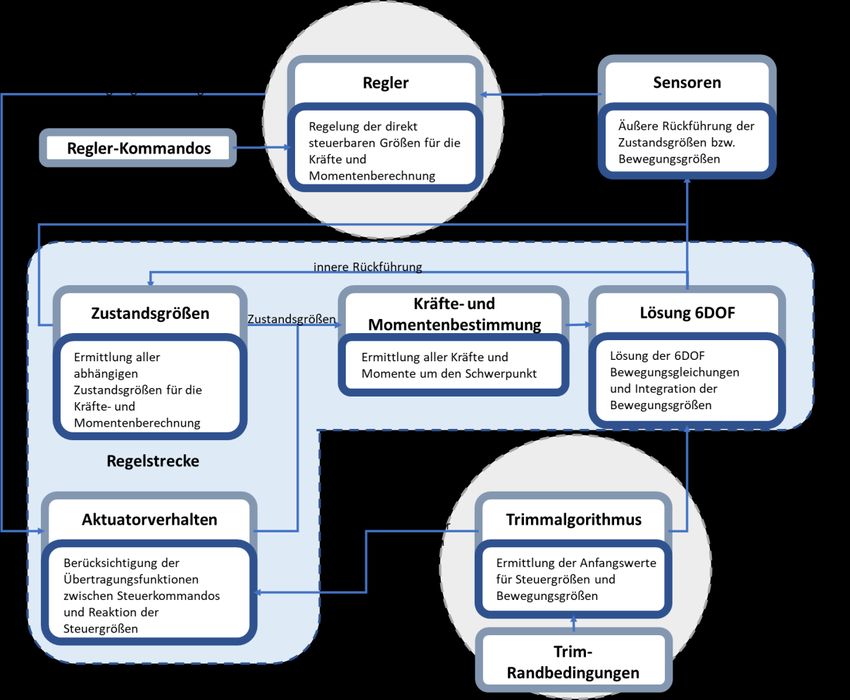
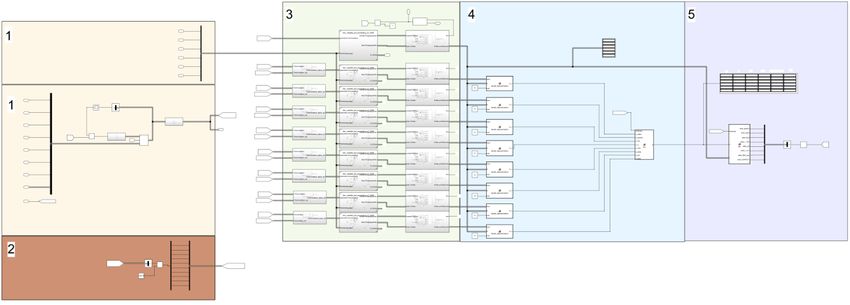
2.2 Umsetzung in Simulink In diesem Kapitel soll mithilfe der zuvor dargestellten Grundlagen die Entwicklung des flugmechanischen Simulationsmodells in Simulink beschrieben werden 2.2.1 Anforderungsanalyse Die Anforderungen an die flugdynamische Simulation gehen bewusst nicht ins Detail, da diese hauptsächlich zur Veranschaulichung der weiteren Entwicklungsschritte dient. Nr. Anforderung Soll Wunsch Allgemeine Forderungen 1 Umsetzung von Richtungskonventionen nach Brockhaus-Flugregelung x Systemeigenschaften 2 Echtzeitfähigkeit auf aktueller Hardware (Testsystem Acer Nitro 5) x 3 realistische Näherung des flugdynamischen Verhaltens für mindestens x einen Punkt des Flugbereichs 4 Implementierung mithilfe von Simulink Standardbibliotheken x Abbildung 12: Anforderungen des flugdynamischen Modells 2.2.2 Funktionsstruktur Zur Lösung der zu bearbeitenden Aufgabe bietet sich eine lösungsneutrale Funktionsstruktur auf Basis der abstrahierten Aufgabenstellung an. Abstraktion der Aufgabenstellung: Erstellung einer Simulation eines regel- und trimmbaren dynamischen Systemes für ein dreidimensional bewegliches Objekt. Daraus ergibt sich folgende Funktionsstruktur: Abbildung 13: Funktionsstruktur der Simulation mit Trimmalgorithmus und Regler 17
Der Trimmalgorithmus und der Regler werden erst in den nachfolgenden Kapiteln behandelt, ihre Schnittstellen sollen aber bereits bei der Implementierung der flugdynamischen Simulation beachtet werden. Daher sind sie bereits in die Funktionsstruktur des Simulationsmodells eingegliedert. 2.2.3 Ausarbeitung Abbildung 14: Gesamtschaltbild in Simulink 2.2.3.1 Zustandsgrößen Die abhängigen Zustandssgrößen für die Kräfte- und Momentenberechnung sind im Wesentlichen die Luftdaten, die Umgebungsdaten und die Massen/Trägheitsdaten. Diese sind wiederum abhängig von den Bewegungsgrößen des Flugzeuges z.B. wird aus der Höhe des Flugzeuges die Dichte für den dynamischen Druck abgeleitet, der zur Umwandlung der aerodynamischen Beiwerte in Kräfte benötigt wird. Die Zustandsgrößen sind somit eine innere Rückführung in der Regelstrecke. Abbildung 15: Blockschaltbild der Zustandsgrößen in Simulink 18
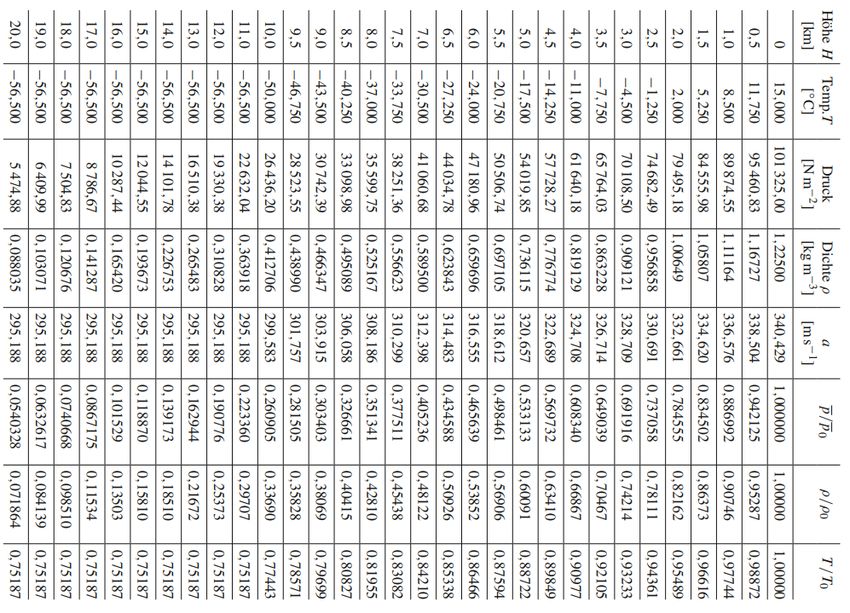
Luftdaten: Die Luftdaten sind die aerodynamisch relevanten Geschwindigkeiten und Winkel, die in die Kräfte- und Momentenberechnung eingehen, wie z.B. VTAS, α und β. Umgebungsdaten: Die Umgebungsdaten beinhalten globale Windverhältnisse bzw. die Böenmodellierung, Atmosphärendaten und die lokale Gravitation. Die globale Windrichtung wird durch die Komponenten des Windgeschwindigkeitsvektors in NED- Richtung angegeben. Die Böenmodellierung wird durch ein zufallsgeneriertes, normalverteiltes Signal mit vorgegebener Varianz und anschließender Glättung realisiert. Die Böeneinflüsse werden zu den Komponenten des globalen Geschwindigkeitsvektors addiert. Abbildung 16: Blockschaltbild der Böenmodellierungen Die Atmosphärendaten ergeben sich aus linear interpolierten Tabellenwerte der ISA-Tabelle ISA-Tabelle28 (siehe Anhang). Für die lokale Gravitation wäre ein genaues Gravitationsmodell möglich, für einfache flugmechanische Untersuchungen und die Reglerauslegung wird angenommen, dass die Gravitation annäherungsweise konstant bleibt. Massen/Trägheitsdaten: Hier ist der Trägheitstensor sowie die Flugzeugmasse hinterlegt. Im Rahmen dieser Arbeit werden die Massen und Trägheitsdaten als konstant angenommen, im Allgemeinen ist dies jedoch nicht der Fall. 2.2.3.2 Sensoren und Regler: Die Steuergrößen werden vom Regler vorgegeben, dafür werden über Sensoren Zustandsgrößen aus der Regelstrecke zurückgeführt. In dieser Arbeit wird das Sensorverhalten nicht modelliert, stattdessen werden Simulationsdaten direkt zurückgeführt. Nichtsdestotrotz soll ein Subsystem für die Sensorik zum Zwecke der Vollständigkeit eingefügt werden. 28 Brockhaus, Alles und Luckner (2011, S. 904). 19
Abbildung 17: Blockschaltbild der Steuergrößen in Simulink Die Anzahl der Steuergrößen kann je nach Flugzeugmodellierung variieren. Im Falle der hier betrachteten linearen A300 Modellierung vorliegenden Steuergrößen sind – wie in Kapitel 2.1.2.1 eingeführt – das Höhenruder, die Querruder, das Seitenruder sowie die Schubhebelstellung. 2.2.3.3 Kräfte- und Momentenbestimmung: Abbildung 18: Blockschaltbild der Kräfte- und Momentenbestimmung in Simulink Aktuatorverhalten: Das Eigenverhalten der Steuergrößen muss ebenfalls berücksichtigt werden. Dafür wird für die Aktuatoren der Steuerflächen PT1-Verhalten (T = 1s) angenommen und für das Triebwerksverhalten die Modellierung der Triebwerksdynamik aus Kapitel 2.2 implementiert 20
Außerdem müssen die zulässigen Werte für die Flächenausschläge festgelegt werden. Dabei geht es darum, die Werte sinnvoll zu begrenzen, da durch die hier gewählte lineare Aerodynamikmodellierung theoretisch unendlich hohe Steuerausschläge zu unendlich hohen Kräften führen. In der Realität sind die maximalen Klappenausschläge sowohl durch Begrenzungen der Aktuatorik als auch durch Grenzen der aerodynamischen Wirksamkeit durch Strömungsablösung begrenzt. Die Addition der Startwerte, die der Trimmalgorithmus liefert, muss nach der Beaufschlagung der Steuersignale mit dem Eigenverhalten erfolgen, da bei t0 die Steuerflächen bereits passend ausgeschlagen sein müssen. Kräfte- und Momentenberechnung: Grundlage für die Kräfte- und Momentenberechnung sind die äußeren Kräfte und Momente, die in Kapitel 2.2 eingeführt wurden, sowie die daraus folgende Gleichung für das Kräftegleichgewicht am Schwerpunkt mit der Ableitung des Impulses bzw. des Dralls. Im Wesentlichen soll die gesamte rechte Seite der Gleichungen ̇ ∗ ( ̇ ) = + + − ∗ ( ⃗) ⃗ × ̇ 2.8 und ̇ ̅ ∗ ( ̇ ) = ⃗⃗ + ⃗⃗ − ( ̅⃗ ) ⃗ × ̇ 2.9 bestimmt werden. Dabei werden die Inertialkräfte mit den äußeren Kräften verrechnet. Dies erleichtert später den Aufbau des Trimmalgorithmus, da alle Kräfte, die im stationären Flug auftreten in ein und demselben Simulink Block berechnet werden und so das Modell und der Trimmalgorithmus auf dasselbe referenzierte Submodell zugreifen können. 2.2.3.4 6DOF Bewegungsgleichungen: Abbildung 19: Blockschaltbild der Bewegungsgleichungen in Simulink Auf Basis der Kräfte- und Momentenberechnung werden hier die zunächst die Beschleunigungen und Winkelbeschleunigungen im flugzeugfesten System ermittelt. Diese werden dann unter Berücksichtigung der vom Trimmalgorithmus ermittelten Startwerte für Geschwindigkeiten, Position, Drehraten und Lagewinkel integriert und in die gewünschten Koordinatensysteme transformiert. Die Koordinatentransformationen basieren dabei auf den in Kapitel 2.1 vorgestellten Matrizen. 21
2.2.3.5 Trimmalgorithmus Für die Anbindung des Trimmalgorithmus muss ein .mat file eingelesen werden indem alle Ergebnisse der Trimmrechnung gespeichert werden (siehe Kapitel 3.2.3). Abbildung 20: Blockschaltbild der Integration des Trimmalgorithmus 22
2.2.4 Ergebnisse In diesem Kapitel sollen die Ergebnisse des flugdynamischen Modells dargestellt und diskutiert werden. Ohne Trimmalgorithmus und Regler können nur manuelle Eingaben für die Steuergrößen vor Beginn der Simulation gemacht werden, deshalb soll hier nur nachgewiesen werden, dass die flugmechanischen Zusammenhänge richtig umgesetzt wurden. Die Steuergrößen sollen nach Definition in Brockhaus Flugregelung bei positiven Ausschlägen negative Drehraten verursachen. Abbildung 21: Nickrate - Höhenruder Die obere Abbildung zeigt exemplarisch am Beispiel des Höhenruders den Zusammenhang zwischen Ruderausschlag und Drehrate, wie er sich in der Simulation ergibt. Nun soll die Phygoidschwingung des Flugzeuges untersucht werden. Beim Starten der Simulation in einer Höhe von 10 000m bei 250m/s Anfangsgeschwindigkeit ergibt sich der folgende zeitliche Verlauf: Abbildung 22: Phygoide im ungetrimmten Zustand 23
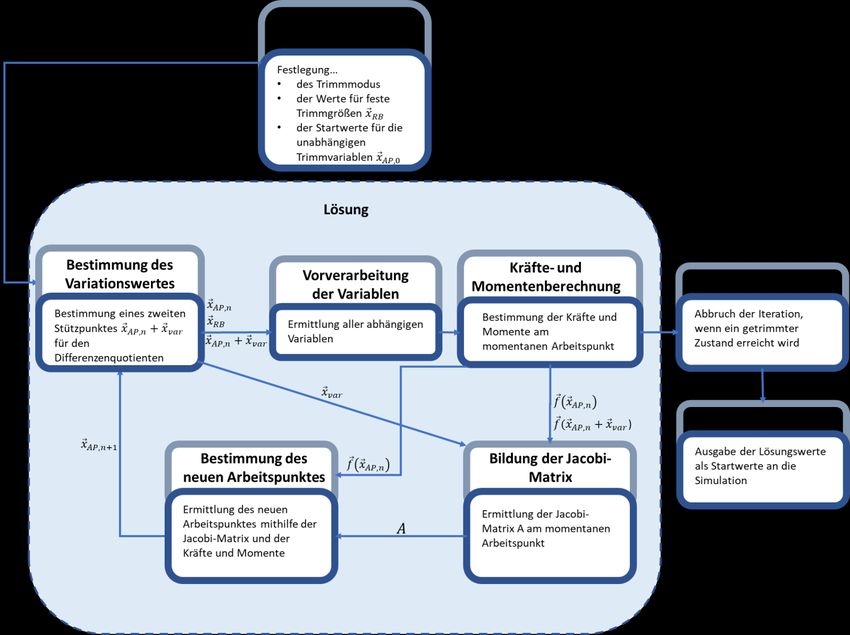
Dabei ist gut der Phasenversatz von 90° zwischen VTAS und der Höhe zu erkennen, der charakteristisch für diese Eigenschwingung ist. Die experimentelle Phygoidfrequenz liegt bei 0,0035 Hz. Nähert man die Phygoidfrequenz mit der Formel 1 = √2 ∗ ∗ 2 2.1029 So ergibt sich eine rechnerische Phygoidfrequenz von 0,00836 Hz. Die Differenz zwischen dem experimentellen und dem rechnerischen Wert liegt außerhalb jeglicher Messtoleranz, allerdings ergeben sich bei Verwendung der Daten aus dem Brockhaus in einer anderen Simulation experimentell dieselben Werte. Es könnte sich somit um eine Limitierung des Datensatzes handeln. Somit wird das Flugverhalten für die weiteren Ausführungen in dieser Arbeit als ausreichend angenommen, da die flugdynamische A300 Simulation ohnehin nur der Visualisierung dient und sowohl Trimmalgorithmus als auch Regler auch an einer realistischen nichtlinearen Simulation entwickelt und getestet werden. Wind und Böen führen zu Abweichungen des Flugpfades, da stationäre Windverhältnisse noch nicht ausgetrimmt und Störfaktoren nicht durch einen Regler kompensiert werden können. Abbildung 23: exemplarischer Flugpfad unter verschiedenen Windverhältnissen In diesem Zustand ist die Simulation zwar im regelungstechnischen Sinne steuerbar, allerdings müssen sämtliche Steuersignale vor Simulationsstart vordefiniert werden, wodurch keine wirkliche Bahnführung bzw. Flugmanöver möglich sind, hierfür wird der Regler benötigt. Auch müssen alle Anfangsbedingungen händisch vorgegeben werden. Aus diesem Grund soll im nächsten Schritt der Trimmalgorithmus folgen, der einen Simulationsstart in einem stationären Zustand ermöglicht indem die Anfangsbedingungen aus Vorgaben an den Trimmalgorithmus errechnet werden. 29 Brockhaus, Alles und Luckner (2011, S. 322). 24
3 Trimmalgorithmus Die Simulation könnte auch ohne eine vorgehende Trimmrechnung in einem stark instationären Flugzustand gestartet werden. Dies würde zu Beginn starke Oszillationen hervorrufen, die vom Regler, der ebenfalls in dieser Arbeit erstellt werden soll, eliminiert werden können, um eine gewünschte Flugbahn umzusetzen. Allerdings ist es sauberer bzw. im Falle von Trainingssimulationen notwendig die Simulation in einem ausgetrimmten, stationären Flugzustand starten zu lassen, um anfängliche Einschwingvorgänge zu umgehen. Aus diesem Grund soll ein Trimmalgorithmus erarbeitet werden, der die Initialisierung der Simulation im stationären Steig- und Sinkflug, Gleitflug und koordiniertem Kurvenflug ermöglicht. Auch der Trimmalgorithmus soll so strukturiert werden, dass er einfach an ein anderes flugdynamisches Modell oder andere Trimmfälle angepasst werden kann. Da im Rahmen dieser Arbeit ein allgemein anwendbarer Trimmalgorithmus erarbeitet werden soll, wurde der Algorithmus auch an einem nichtlinearen Aerodynamik- und Triebwerks-Modell des UAVs von Airbus Defence & Space entwickelt und getestet. Aus Gründen der Geheimhaltung wird der Trimmalgorithmus allerdings nur am Beispiel des im Rahmen dieser Arbeit entwickelten Modells mit den einfacheren Modellierungen erläutert. 3.1 Grundlagen 3.1.1 Was ist Trimmung? Trimmung im Allgemeinen beschreibt das Herbeiführen eines stationären Zustands in einem dynamischen System. Dabei geht es grundsätzlich um ein Problem der Nullstellenfindung, da die zeitlichen Ableitungen von Zustandsgrößen durch geeignete Kombination von Eingangsgrößen auf null gesetzt werden müssen. Trimmung am Flugzeug im speziellen bedeutet einen Zustand herbeizuführen, bei dem die translatorischen und rotatorischen Beschleunigungen null werden. Dies ist gleichbedeutend mit einem Kräfte- und Momentengleichgewicht um den Schwerpunkt. Diese Erkenntnis führt uns wieder zu den Bewegungsgleichungen aus Kapitel 2.3. ⃗ ̇ 1 = ( ̇ ) = ( + + − ∗ ( ⃗ )) ⃗ × ̇ 3.1 Und ⃗ ̇ = ( ̇ ) = −̅ 1 ( ⃗⃗ + ⃗⃗ − ( ̅ ⃗ )) ⃗ × ̇ 3.2 Mit dem Unterschied, dass die zeitlichen Ableitungen der translatorischen und rotatorischen Geschwindigkeiten wegfallen. Dies führt zu: ⃗ = 0 = + + − ∗ ( ⃗) ⃗ × 3.3 Und ⃗ ⃗⃗ + = 0 = ⃗⃗ − ( ̅⃗ ) ⃗ × 3.4 Es ergibt sich also ein Gleichungssystem mit 6 Gleichungen. 25
Sie können auch lesen