TT - www.linearachsensysteme.de - Schlüter Automation und Sensorik ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
D
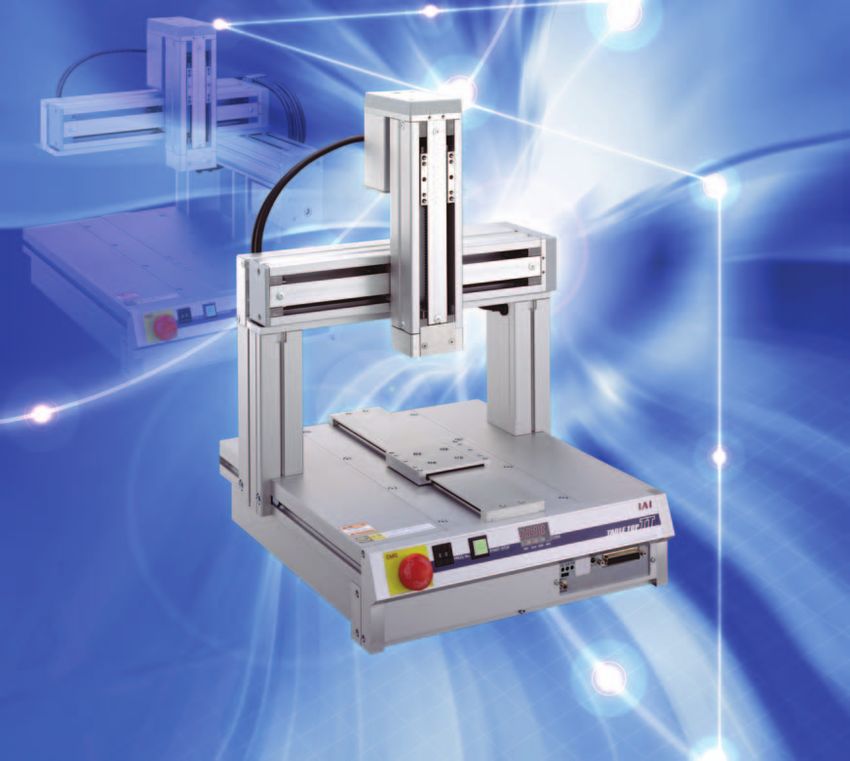
TABLETOP-ROBOTER TT
Wiederholgenauigkeit ± 0.02 mm
Bauformen Portal / Ausleger
Achsenzahl 2 Achsen / 3 Achsen
Arbeits- 200 X 200
bereiche 400 X 400
Programmierbare
3000 Positionen
Positionen
www.linearachsensysteme.de
TT-Roboter - Beschreibung
‘Easy to use’-TableTop-Roboter - Kompakt und
Hochleistungsfähiger Tisch-Roboter mit
exzellentem Preis-Leistungsverhältnis
Wiederholgenauigkeit von ±0,02 mm
Steifer Grundrahmen, Kugelumlaufpindel und Schrittmotor
Der TT-Roboter basiert auf einem steifen Grundrahmen aus
Querschnittsansicht des TT-Grundrahmens
gezogenem Aluminium. Die benutzte Kugelumlaufspindel,
der Schrittmotor und der integrierte Drehgeber garantieren
Präzision und verhindern das Anfahren falscher Positionen.
Integrierte X-SEL-Steuerung
Hohe Bahngenauigkeit und konstante
Geschwindigkeit
Der TT-Roboter bietet die hohe Bahngenauigkeit und
konstante Geschwindigkeit zusammen mit den umfangreichen
Funktionen und Befehlen, welche die integrierte X-SEL-
Steuerung ermöglicht. In der 3-Achsausführung können Sie
interpolierte dreidimensionale Bahnen einschließlich Kreisfor-
men abfahren. Der TT-Roboter kann sowohl über ein Program-
miergerät, PC-Software als auch über andere Tools gesteuert
werden. Maximal 64 Programme können gespeichert, bis zu
16 Programme simultan gefahren und insgesamt bis zu 3000 Dreidimensional steuerbarer Antrieb
Positionen programmiert werden.
3 Bewegung mit Druckbetrieb
Schubbewegung zum Testen und zum Einpressen
Die Bewegung mit Druckbetrieb ist genauso wie bei
unseren RoboCylindern auch bei der TableTop-Serie
möglich. Auch hier kann die Druckkraft je nach
Anwendung frei eingestellt werden, z.B. zum
Funktionstest von Schaltern, Tastaturen etc. oder
zum Einpressen von Werkstücken.
Variierbare Druckkraft-Funktion (z.B. zum Schalter-Testen)
1 Tabletop Roboter TT
Hochfunktional
4
Bauform Portal oder Ausleger
Portalausführung für Einsatzfälle, in denen hohe
Steifigkeit erforderlich ist und die Auslegerausführung
bei begrenzten räumlichen Verhältnissen.
Die Portalbauform besitzt eine feststehende Y-Achse zur Hand-
habung von Zuladungen mit ungleicher Gewichtsverteilung,
besonders geeignet für Anwendungen, in denen die X-Achse eine
hohe Last aufnehmen muss, bzw. dort, wo ein großer Teil der Portal Ausleger
Zuladung über den Schlitten hinausragt.
Die Auslegerbauform ermöglicht einen großen Freiraum, also ideal,
wenn in Ihrer Anlage Zuladungen größerer Abmessungen oder
Lasten mit unregelmäßigen Formen unter vorgegebenen,
5
unveränderlichen Verhältnissen befördert werden müssen.
Zwei Arbeitsbereiche zur Auswahl
Typ 2020 (200 mm) oder Typ 4040 (400 mm)
570 mm
370 mm
Neben den beiden Bauformen (Portal oder Ausleger) gibt es
den TT-Roboter auch mit zwei unterschiedlichen
Arbeitsbereichen, und zwar 200 mm x 200 mm (Typ 2020)
oder 400 mm x 400 mm (Typ 4040) gemäß der Hublängen
in den X-/Y-Achsen. Ganz gleich, ob in Ihrer Anlage kleine
oder große Zuladungen zu befördern sind, Sie können aus
den geeigneten Modellen mit dem passenden Arbeitsbereich
auswählen.
Der TT-Roboter kann sowohl mit 2 als auch mit 3 Achsen
geliefert werden. Die Bauform mit drei Achsen ist mit einer
330 mm 530 mm Bremse ausgerüstet, die das Absinken des Schlittens bei
Abschalten der Energieversorgung verhindert
Typ 2020 Typ 4040
6
Unterstützende Netzwerke Programmaustausch
Übertragung von Be-
(optional) triebsdaten (IAI Protokoll)
Vorbereitet für DeviceNet, CC-Link, ProfiBus und HAB
Ethernet
PC
HAB
Die TT-Roboter können in Netzwerke wie
10/100 Eingabe
DeviceNet, CC-Link, ProfiBus und Ethernet für die
Übertragung und Erfassung von Positionsänderun- HAB
gen, Produktionsergebnissen und anderer Daten
SPS
eingebunden werden. Senden/Empfangen der
E/A-Signale (Modbus/TCP)
Tabletop Roboter TT 2Tabletop Roboter - Einsatzbeispiele
Einsatzbeispiele
Beschichten Löten
Mit der hochleistungsfähigen Interpolation wird der Roboter zu einem Mit seinen 3000 Positionen kann der TT-Roboter problemlos
idealen Beschichtungswerkzeug im zwei- oder dreidimensionalen zum Löten von Leiterplatten, usw., eingesetzt werden.
Raum.
Anwendung Anwendung
Leiterplattenbeschichtung mit Silikon, Klebstoff auf Löten elektronischer Bauelemente
Lautsprecher, Dichtungsmittel auf Kraftstofftanks, usw.
Einschrauben Prüfen von Leiterplatten
Mit der Druckfunktion der Z-Achse kann ein Schrauben- Ein Bilderfassungssensor kann an der Z-Achse zum Prüfen
dreher gegen die Zuladung zum Anziehen von Schrauben von Leiterplatten und Bauteilen befestigt werden.
verwendet werden.
Anwendung Anwendung
Schrauben an einer elektronischen Komponente Leiterplatten auf Bestückungsfehler prüfen.
oder an einem Autoteil festziehen. Prüfen von bearbeiteten Bauteilen.
3 Tabletop Roboter TTTabletop Roboter - Baugruppendefinition
Baugruppendefinition
Stirnseite des X-Schlittens
Der X-Achsenschlitten hat eine Stufe, die das
Eindringen von
Schmutz verhindert.
Not-Aus-Schalter
Z-Achse Schlüsselschalter zum Abschalten aller Antriebe
Digitaler Programmwahlschalter
Digitaler Wahlschalter zum Aufrufen des
Y-Achse gewünschten Programms .
Funktionsschalter
Drucktaster zum Starten/Unterbrechen eines
Programms.
Anzeigeeinheit
4-stellige, 7-Segment-LEDs zur Anzeige der
Nummer des gerade ablaufenden Programms,
von Fehlercodes, usw.
Bremsfreigabeschalter
Schalter zum zwangsgesteuerten Lösen der
Z-Achse bei ausgeschalteten Servos
Netzwerkanschluss (optional)
Anschluss für Netzwerkstecker.
(Siehe Seite 17)
Anschluss für PC-Kabel
D-sub, 25-Pin-Stecker zum Anschluss des
PC-Kabels oder des Handprogrammiergerätes.
Z-Achsbremse
Bremse, die das Absinken des Schlittens beim
Abschalten des
Antriebes oder der
Stromversorgung
verhindert.
X-Achse Positionssteller
Je ein Drehknopf zum Feinpositionieren des
Schlittens bei abgeschaltetem Antrieb
(X-, Y- und Z-Achsen.)
Ein-/Ausgangsstecker
34-Pin-Flachstecker für die digitalen E/As
mit 24 V DC. (Siehe Seite 15)
Netzschalter
Stromversorgung
(Ein Leistungsstecker wird pro Antrieb geliefert.)
Tabletop Roboter TT 4Modelle
2-Achsen
Portal
TT-A2 S.7, S.8
3-Achsen
TT Serie
TT-A3 S.9, S.10
2-Achsen
Ausleger
TT-C2 S.11, S.12
3-Achsen
TT-C3 S.13, S.14
Technische Daten
Hub (mm) Maximale Zuladung (kg) Wiederhol-
Typ Geschwindig- Genauigkeit Modell Seite
X-Achse Y-Achse Z-Achse keit (mm/s) X-Achse Y-Achse Z-Achse (mm)
200 200 - TT-A2-I-2020 7
2-Achsen 10 5 -
400 400 - TT-A2-I-4040 8
50 TT-A3-I-2020-05B
Portal 200 200 9
100 TT-A3-I-2020-10B
3-Achsen 10 - 2
50 TT-A3-I-4040-05B
400 400 10
100 TT-A3-I-4040-10B
300 ±0.02
200 200 - TT-C2-I-2020 11
2-Achsen - 4 -
400 400 - TT-C2-I-4040 12
Ausleger 50 TT-C3-I-2020-05B
200 200 13
100 TT-C3-I-2020-10B
3-Achsen - - 2
50 TT-C3-I-4040-05B
400 400 14
100 TT-C3-I-4040-10B
5 Tabletop Roboter TTModellbezeichnung
TT - A3 - I - 2020 - 05B - PR
1 2 3 4 5 6
1 Serie 2 Typ 3 Enkoder 4 XY Hub (mm) 5 Z Hub (mm) 6 Option
A2 05B DV
A3: CC
A3 10B
2020 PR
TT I
4040 ET
C2 05B
C3: FT
C3 10B
P
1 Serie 4 XY Hub
Bezeichnung der Serie Hub der X-und Y-Achsen 2020 200 mm
(Der Hub der X-Achse und der Y-Achse ist identisch.)
4040 400 mm
2 Typ
Bauform und Anzahl der Antriebsachsen
5 Z Hub
A2 Portal, 2 Achsen A3 Portal, 3 Achsen Hub der Z-Achse 05B 50 mm
* Die Z-Achse ist standardmäßig mit Bremse ausgerüstet.
C2 Ausleger, 2 Achsen C3 Ausleger, 3 Achsen Deshalb wird die Zahl, die den Hub angibt, mit "B" ergänzt. 10B 100 mm
3 Enkoder 6 Option
Typ des im Antrieb eingebauten Enkoders
Derzeit ist nur "Inkremental" möglich. Spezifikation der im Antrieb einsetzbaren Optionen:
DV DeviceNet Anschluss PR ProfiBus Anschluss
I Inkremental: Da die Daten der Schlittenposition beim
Abschalten der Stromversorgung gelöscht CC Link Anschluss ET Ethernet Anschluss
werden, muss beim Wiedereinschalten der
Stromversorgung Referenzfahren durchge- 24 V DC Ein/Ausgänge
FT Montagefuß P PNP
führt werden.
Systemkonfiguration
Stromversorgung: 230 VAC
* Der Antrieb ist mit einem Stecker
für die Stromversorgung ausge- SPS
rüstet. Das Kabel stellt der An-
wender bereit. E/A Flachkabel (mitgeliefert)
Modell: CB-DS-PIO020
Siehe Seite 15
PC Software (optional)
2m
Modell: IA-101-X-CW (incl. PC-Kabel)
Siehe Seite 18
Verschiedene Netzwerk-
anschlüsse (optional)
5m
PC-Kabel
• DeviceNet
Modell: CB-ST-9-25 • CC-LINK
• ProfiBus
4m • Ethernet
Siehe Seite 17
Handprogrammiergerät (optional)
Modell: IA-T-X/XD/XA
Siehe Seite 18
Tabletop Roboter TT 6TT Tabletop Roboter
TT-A2-2020 Tabletop-Roboter/ Portal 2 Achsen
XY-Achsen: 200 mm
Typ Portal, 2-Achsen Hub X-Achse: 200 mm / Y-Achse: 200 mm Zuladung X-Achse:10 kg / Y-Achse: 5 kg
Modellspezifikation Serie Typ Enkoder XY-Achsenhub Option
(Beispiel) TT - A2 - I - 2020 - DV
Modell/Spezifikation
Achs- Steigung Hub Geschwindigkeit Zuladung
Modell Enkoder Motor (kg)
konfiguration (mm) (mm) (mm/s) (Hinweis 1)
X-Achse 6 200 1-300 10
TT-A2-I-2020-
Inkremental Schrittmotor
Y-Achse 6 200 1-300 5
* gibt
in der oben aufgeführten Modellbezeichnung die einsetzbare(n) Option(en) an.
Optionen Technische Daten
Bezeichnung Modell Antrieb Kugelumlaufspindel (ø10 mm, gerollt C10)
DeviceNet Anschluss DV Wiederholgenauigkeit ±0,02 mm
CC-Link Anschluss CC Spiel (Hinweis 2) 0,1 mm oder kleiner
ProfiBus Anschluss PR Führung Direkt-gekoppelt, Kugelumlauf
Ethernet Anschluss ET Zulässiges Lastmoment (Hinw. 3) Ma: 6,5 Nm; Mb: 9,3 Nm; Mc: 16,4 Nm
Montagefuß FT Umgebungstemperatur/Feuchtigkeit 5 bis 40°C, 85% relative Feuchtigk. max. (nicht kondens.)
Gewicht 14,8 kg
Abmessungen
* Beim Referenzfahren verfährt
der Schlitten zum mechanischen ME
Anschlag. Deshalb ist auf
18.2
mögliche Kollision mit der
SE
Peripherie zu achten.
2.5
SE: Hubende 70
ME: Mechanischer Anschlag 60
Yst:200
40
80
50
42
30
80
72
70
50
HOME
ME
41.8
2.5
37. 4
30
4-M5, 10 tief 4-M4, 8 tief
4-M5, 10 tief 4-M4, 8 tief 133.3 2-Ø4H7, 5 tief
2-Ø4H7, 5 tief 30 338.5 1.2
Montagebohrungen für X-Achsschlitten
369.7
Montagebohrungen für Y-Achsschlitten
338.5 Ø5
Bohrung Ø8
88.2 185 107
50
1
37.4
Positioniersteller
Positioniersteller
15 für Y-Schlitten
T-Nut (4 Positionen)
179
126
16.7 70 Xst:200 51.8 4.3 1.8
301
2.5 2.5
ME HOME SE ME
14
4 .3
7.3
Einzelheit T-Nut
85
8
10 35 240 35 10
330
Einsetzbare Steuerungen
Einsetzbare Max. Anzahl an- Geeigneter Versorgungs- (Hinweis 1) Die Zuladung gilt für den Betrieb mit Beschleunigung
Steuerungen steuerbarer Achsen Programme Seite
Enkoder spannung 0,3 G.
Eingebaut 2 Achsen Inkremental 64 230 V 15
(Hinweis 2) Trifft für alle X- oder Y-Achsen zu.
Achtung (Hinweis 3) Das Lastmoment stellt einen achsbezogenen Wert für
eine Lebensdauer von 5.000 km dar. (siehe Last-
momente auf S. 19)
7 TT-A2-2020TT Tabletop Roboter
TT-A2-4040 Tabletop-Roboter/ Portal 2 Achsen
XY-Achsen: 400 mm
Typ Portal, 2-Achsen Hub X-Achse: 400 mm / Y-Achse: 400 mm Zuladung X-Achse: 10 kg / Y-Achse: 5 kg
Modellspezifikation Serie Typ Enkoder XY-Achsenhub Option
(Beispiel) TT - A2 - I - 4040 - DV
Modell/Spezifikation
Achs- Steigung Hub Geschwindigkeit Zuladung
Modell Enkoder Motor (kg)
konfiguration (mm) (mm) (mm/s) (Hinweis 1)
X-Achse 6 400 1-300 10
TT-A2-I-4040-
Inkremental Schrittmotor
Y-Achse 6 400 1-300 5
*
gibt in der oben aufgeführten Modellbezeichnung die einsetzbare(n) Option(en) an.
Optionen Technische Daten
Bezeichnung Modell Antrieb Kugelumlaufspindel (ø10 mm, gerollt C10)
DeviceNet Anschluss DV Wiederholgenauigkeit ±0,02 mm
CC-Link Anschluss CC Spiel (Hinweis 2) 0,1 mm oder kleiner
ProfiBus Anschluss PR Führung Direkt-gekoppelt, Kugelumlauf
Ethernet Anschluss ET Zulässiges Lastmoment (Hinw. 3) Ma: 6,5 Nm; Mb: 9,3 Nm; Mc: 16,4 Nm
Montagefuß FT Umgebungstemperatur/Feuchtigkeit 5 bis 40°C, 85% relative Feuchtigk. max. (nicht kondens.)
Gewicht 33 kg
Abmessungen
* Beim Referenzfahren verfährt
der Schlitten zum mechanischen
Anschlag. Deshalb ist auf
18.2
2.5
mögliche Kollision mit der ME
Peripherie zu achten.
SE
SE: Hubende
ME: Mechanischer Anschlag
70
60
40
Yst:400
50
80
42
30
80
72
70
37.4
30
HOME
41.8 50
2.5
4-M5, 10 tief 4-M4, 8 tief 4-M5, 10 tief 4-M4, 8 tief
2-Ø4H7, 5 tief ME
2-Ø4H7, 5 tief
Montagebohrungen für Y-Achsschlitten 333.3 Montagebohrungen für X-Achsschlitten
30 538.5 1.2
569.7
Ø5
Bohrung Ø8
Positioniersteller
1
für Y-Schlitten
538.5
188.2
50 385 107 Positioniersteller
37.4
58
15 4.3 1.8
179
T-Nut (4 Positionen) 16.7 70 Xst:400 51.8
126
301
2.5 2.5
HOME SE ME
14
ME
4.3
7.3
85
Einzelheit T-Nut
8
10 35 440 35 10
530
Einsetzbare Steuerungen
Einsetzbare Max. Anzahl an- Geeigneter Versorgungs- (Hinweis 1) Die Zuladung gilt für den Betrieb mit Beschleunigung
Steuerungen steuerbarer Achsen Enkoder Programme spannung Seite
0,3 G.
Eingebaut 2 Achsen Inkremental 64 230 V 15
(Hinweis 2) Trifft für alle X- oder Y-Achsen zu.
Achtung (Hinweis 3) Das Lastmoment stellt einen achsbezogenen Wert für
eine Lebensdauer von 5.000 km dar. (siehe Last-
momente auf S. 19)
TT-A2-4040 8TT Tabletop Roboter
TT-A3-2020 Tabletop-Roboter/ Portal 3 Achsen
XY-Achsen: 200 mm Z-Achse: 50 mm / 100 mm
Zuladung
Typ Portal, 3-Achsen Hub X-Achse: 200 mm / Y-Achse: 200 mm / Z-Achse: 50 mm / 100 mm X-Achse: 10 kg / Z-Achse: 2 kg
Modellspezifikation Serie Typ Enkoder XY-Achsenhub Z-Achsenhub Option
(Beispiel) TT - A3 - I - 2020 - 05B - DV
Modell/Spezifikation
Achs- Steigung Hub Geschwindigkeit Zuladung
Modell Enkoder Motor (kg)
konfiguration (mm) (mm) (mm/s) (Hinweis 1)
X-Achse 6 200 1-300 10
TT-A3-I-2020-
-
Y-Achse Inkremental Schrittmotor 6 200 1-300 -
Z-Achse 6 50/100 1-300 (Hinweis 2) 2
und
* geben in der oben aufgeführten Modellbezeichnung den Z-Achshub, beziehungsweise die einsetzbare(n) Option(en) an
Optionen Technische Daten
Bezeichnung Modell Antrieb Kugelumlaufspindel (ø10 mm, gerollt C10)
DeviceNet Anschluss DV Wiederholgenauigkeit ±0,02 mm
CC-Link Anschluss CC Spiel (Hinweis 3) 0,1 mm oder kleiner
ProfiBus Anschluss PR Führung Direkt-gekoppelt, Kugelumlauf
Ethernet Anschluss ET Zulässiges Lastmoment (Hinw. 4) Ma: 6,5 Nm; Mb: 9,3 Nm; Mc: 16,4 Nm
Montagefuß FT Umgebungstemperatur/Feuchtigkeit 5 bis 40°C, 85% relative Feuchtigk. max. (nicht kondens.)
Gewicht 16,5 kg
Abmessungen
* Beim Referenzfahren verfährt
der Schlitten zum mechanischen
14.2
Anschlag. Deshalb ist auf ME
mögliche Kollision mit der
SE
Peripherie zu achten.
2.5
70
SE: Hubende
60
ME: Mechanischer Anschlag
40
Yst:200
37.4
80
30
4-M5, 10 tief 80
72
2-Ø4H7, 5 tief
70
58
50
42
30
HOME
ME
37.8
2.5
4-M4, 8 tief
4-M5, 10 tief 4-M4, 8 tief
Positioniersteller 2-Ø4H7, 5 tief
Montagebohrungen für Z-Achsschlitten 83.3 für Z-Schlitten
30 338.5 1.2
76.8 369.7 Montagebohrungen für X-Achsschlitten
338.5
135 107
51.8
Ø5
Zst:50 (or 100)
ME
2.5
37.4 Bohrung Ø8
50
197.8(247.8 if Zst = 100)
HOME
1
50
Positioniersteller
für Y-Schlitten
407.3 (457.3 if Zst = 100)
ME
SE
Positioniersteller
46
2.5
179
T-Nut (4 Positionen)
102.5
16.7 70 Xst:200 51.8
4.3 1.8
14
2.5 2.5
ME HOME SE ME
85
4.3
7.3
Einzelheit T-Nut
10 35 240 35 10
8
(20) 330
(Überstand Kabel)
Einsetzbare Steuerungen
(Hinweis 1) Die Zuladung gilt für den Betrieb mit Beschleunigung
Einsetzbare Max. Anzahl an- Geeigneter
Programme
Versorgungs-
Seite 0,3 G.
Steuerungen steuerbarer Achsen Enkoder spannung (Hinweis 2) Bei Hublänge 50 mm wird die max. Geschwindigkeit auf
Eingebaut 3 Achsen Inkremental 64 230 V 15 Grund des verkürzten Hubs auf 280 mm/s begrenzt.
Achtung (Hinweis 3) Trifft für alle X- oder Y-Achsen zu.
(Hinweis 4) Das Lastmoment stellt einen achsbezogenen Wert für
eine Lebensdauer von 5.000 km dar. (siehe Last-
momente auf S. 19)
9 TT-A3-2020TT Tabletop Roboter
TT-A3-4040 Tabletop-Roboter/ Portal 3 Achsen
XY-Achsen: 400 mm Z-Achse: 50 mm / 100 mm
Zuladung
Typ Portal, 3-Achsen Hub X-Achse: 400 mm / Y-Achse: 400 mm / Z-Achse: 50 mm / 100 mm X-Achse: 10 kg / Z-Achse: 2 kg
Modellspezifikation Serie Typ Enkoder XY-Achsenhub Z-Achsenhub Option
(Beispiel) TT - A3 - I - 4040 - 05B - DV
Modell/Spezifikation
Achs- Steigung Hub Geschwindigkeit Zuladung
Modell Enkoder Motor (kg)
konfiguration (mm) (mm) (mm/s) (Hinweis 1)
X-Achse 6 400 1-300 10
TT-A3-I-4040-
-
Y-Achse Inkremental Schrittmotor 6 400 1-300 -
Z-Achse 6 50/100 1-300 (Hinweis 2) 2
und
* geben in der oben aufgeführten Modellbezeichnung den Z-Achshub, beziehungsweise die einsetzbare(n) Option(en) an
Optionen Technische Daten
Bezeichnung Modell Antrieb Kugelumlaufspindel (ø10 mm, gerollt C10)
DeviceNet Anschluss DV Wiederholgenauigkeit ±0,02 mm
CC-Link Anschluss CC Spiel (Hinweis 3) 0,1 mm oder kleiner
ProfiBus Anschluss PR Führung Direkt-gekoppelt, Kugelumlauf
Ethernet Anschluss ET Zulässiges Lastmoment (Hinw. 4) Ma: 6,5 Nm; Mb: 9,3 Nm; Mc: 16,4 Nm
Montagefuß FT Umgebungstemperatur/Feuchtigkeit 5 bis 40°C, 85% relative Feuchtigk. max. (nicht kondens.)
Gewicht 35 kg
Abmessungen
* Beim Referenzfahren verfährt
der Schlitten zum mechanischen
Anschlag. Deshalb ist auf
mögliche Kollision mit der
14.2
ME
Peripherie zu achten.
SE: Hubende
2.5
ME: Mechanischer Anschlag SE
70
60
40
Yst:400
37.4
80
30 4-M5, 10 tief
70
80
72
2-Ø4H7, 5 tief
50
42
30
37.8 58
4-M4, 8 tief HOME
4-M5, 10 tief 4-M4, 8 tief
ME
2.5
2-Ø4H7, 5 tief
Montagebohrungen für Z-Achsschlitten Positioniersteller
283.3 für Z-Schlitten Montagebohrungen für X-Achsschlitten
30 538.5 1.2
569.7
Ø5
Bohrung Ø8
76.8 538.5
58 335 107
1
Positioniersteller
50 51.8
ME für Y-Schlitten
(or100)
Zst+147.8
HOME
Zst:50
Positioniersteller
2.5
37.4
50
SE
58
ME
Zst+357.3
2.5
46
4.3 1.8
179
16.7 70 Xst:400 51.8
102.5
T-Nut (4 Positionen)
2.5 2.5
ME HOME SE ME
14
4.3
7.3
85
Einzelheit T-Nut
8
10 35 440 35 10
(20) 530
(Überstand Kabel)
Einsetzbare Steuerungen
(Hinweis 1) Die Zuladung gilt für den Betrieb mit Beschleunigung
Einsetzbare Max. Anzahl an- Geeigneter
Programme
Versorgungs-
Seite 0,3 G.
Steuerungen steuerbarer Achsen Enkoder spannung (Hinweis 2) Bei Hublänge 50 mm wird die max. Geschwindigkeit auf
Eingebaut 3 Achsen Inkremental 64 230 V 15
Grund des verkürzten Hubs auf 280 mm/s begrenzt.
Achtung (Hinweis 3) Trifft für alle X- oder Y-Achsen zu.
(Hinweis 4) Das Lastmoment stellt einen achsbezogenen Wert für
eine Lebensdauer von 5.000 km dar. (siehe Last-
momente auf S. 19)
TT-A3-4040 10TT Tabletop Roboter
TT-C2-2020 Tabletop-Roboter/ Ausleger 2 Achsen
XY-Achsen: 200 mm
Zuladung
Type Ausleger, 2-Achsen Hub X-Achse: 200 mm / Y-Achse: 200 mm Y-Achse: 4 kg
Modellspezifikation Serie Typ Enkoder XY-Achsenhub Option
(Beispiel) TT - C2 - I - 2020 - DV
Modell/Spezifikation
Achs- Steigung Hub Geschwindigkeit Zuladung
Modell Enkoder Motor (kg)
konfiguration (mm) (mm) (mm/s) (Hinweis 1)
X-Achse 6 200 1-300 -
TT-C2-I-2020- Inkremental Schrittmotor
Y-Achse 6 200 1-300 4
*
gibt in der oben aufgeführten Modellbezeichnung die einsetzbare(n) Option(en) an.
Optionen Technische Daten
Bezeichnung Modell Antrieb Kugelumlaufspindel (ø10 mm, gerollt C10)
DeviceNet Anschluss DV Wiederholgenauigkeit ±0,02 mm
CC-Link Anschluss CC Spiel (Hinweis 2) 0,1 mm oder kleiner
ProfiBus Anschluss PR Führung Direkt-gekoppelt, Kugelumlauf
Ethernet Anschluss ET Zulässiges Lastmoment (Hinw. 3) Ma: 6,5 Nm; Mb: 9,3 Nm; Mc: 16,4 Nm
Montagefuß FT Umgebungstemperatur/Feuchtigkeit 5 bis 40°C, 85% relative Feuchtigk. max. (nicht kondens.)
Gewicht 16,3 kg
Abmessungen
* Beim Referenzfahren verfährt
der Schlitten zum mechanischen
Anschlag. Deshalb ist auf 30 63.6 Xst:200
mögliche Kollision mit der 2.5 2.5
Peripherie zu achten. ME SE HOME ME
SE: Hubende ME
26
ME: Mechanischer Anschlag
SE
2.5
73 2-Ø4H7, 5 tief
8 42 23
14 30 29 120 4-M5, 10 tief
Yst:200
29 44
50
40
20.5
40 4-M4, 8 tief
HOME
60
58
30
ME Ø5
2.5
Bohrung Ø8
84
4-M4, 10 tief
7.5
4-M5, 10 tief
1
2-Ø4H7, 5 tief
Montagebohrungen für Y-Achsschlitten
Positioniersteller
Positioniersteller
42 73 49
für Y-Schlitten
58
58
4.3 1.8
10
Positioniersteller
für X-Schlitten
4.3
7.3
156
T-Nut (4 Positionen) Einzelheit T-Nut
317
50 41.8
6.2 60
49
1.5
85
8
310 10 30 148.8 45 135 45 1.2
10.6 320 28 405
Einsetzbare Steuerungen
(Hinweis 1) Die Zuladung gilt für den Betrieb mit Beschleunigung
Einsetzbare Max. Anzahl an- Geeigneter Versorgungs-
Steuerungen steuerbarer Achsen Enkoder Programme spannung Seite 0,3 G.
(Hinweis 2) Trifft für alle X- oder Y-Achsen zu.
Eingebaut 2 Achsen Inkremental 64 230 V 15
(Hinweis 3) Das Lastmoment stellt einen achsbezogenen Wert für
Achtung
eine Lebensdauer von 5.000 km dar. (siehe Last-
momente auf S. 19)
11 TT-C2-2020TT Tabletop Roboter
TT-C2-4040
Typ Ausleger, 2-Achsen Hub X-Achse: 400 mm / Y-Achse: 400 mm
Tabletop-Roboter/ Ausleger 2 Achsen
XY-Achsen: 400 mm
Zuladung Y-Achse: 4 kg
Modellspezifikation Serie Typ Enkoder XY-Achsenhub Option
(Beispiel) TT - C2 - I - 4040 - DV
Modell/Spezifikation
Achs- Steigung Hub Geschwindigkeit Zuladung
Modell Enkoder Motor (kg)
konfiguration (mm) (mm) (mm/s) (Hinweis 1)
X-Achse 6 400 1-300 -
TT-C2-I-4040- Inkremental Schrittmotor
Y-Achse 6 400 1-300 4
*
gibt in der oben aufgeführten Modellbezeichnung die einsetzbare(n) Option(en) an.
Optionen Technische Daten
Bezeichnung Modell Antrieb Kugelumlaufspindel (ø10 mm, gerollt C10)
DeviceNet Anschluss DV Wiederholgenauigkeit ±0,02 mm
CC-Link Anschluss CC Spiel (Hinweis 2) 0,1 mm oder kleiner
ProfiBus Anschluss PR Führung Direkt-gekoppelt, Kugelumlauf
Ethernet Anschluss ET Zulässiges Lastmoment (Hinw. 3) Ma: 6,5 Nm; Mb: 9,3 Nm; Mc: 16,4 Nm
Montagefuß FT Umgebungstemperatur/Feuchtigkeit 5 bis 40°C, 85% relative Feuchtigk. max. (nicht kondens.)
Gewicht 35 kg
Abmessungen
* Beim Referenzfahren verfährt
der Schlitten zum mechanischen
Anschlag. Deshalb ist auf 30 63.6 Xst:400
mögliche Kollision mit der
2.5 2.5
Peripherie zu achten. ME SE HOME ME
2.5
ME
SE: Hubende
26
ME: Mechanischer Anschlag
SE
2-Ø4H7, 5 tief
73
213.6 4-M4, 10 tief
Yst:400
8 42 23
14 30 29
50
40
29 44
40 4-M4, 10 tief
20.5
60 Ø5 Bohrung Ø8
58
HOME
30
1
ME
2.5
84
4-M5, 10 tief
7.5
4-M4, 10 tief 2-Ø4H7, 5 tief Positioniersteller
Montagebohrungen für Y-Achsschlitten
4.3 1.8
142 73 49 Positioniersteller
für Y-Schlitten
4.3
7.3
10 58
Positioniersteller
für X-Schlitten Einzelheit T-Nut
Gleitstück
156
317
22 Gleitstück
50 41.8 T-Nut (4 Positionen)
1.5
49
60
85
8
30 148.8 45 335 45
510 10
605
10.6 520 28
Einsetzbare Steuerungen
(Hinweis 1) Die Zuladung gilt für den Betrieb mit Beschleunigung
Einsetzbare Max. Anzahl an- Geeigneter Versorgungs-
Steuerungen steuerbarer Achsen Enkoder Programme spannung Seite 0,3 G.
(Hinweis 2) Trifft für alle X- oder Y-Achsen zu.
Eingebaut 2 Achsen Inkremental 64 230 V 15
(Hinweis 3) Das Lastmoment stellt einen achsbezogenen Wert für
Achtung
eine Lebensdauer von 5.000 km dar. (siehe Last-
momente auf S. 19)
TT-C2-4040 12TT Tabletop Roboter
TT-C3-2020 Tabletop-Roboter/ Ausleger 3 Achsen
XY-Achsen: 200 mm Z-Achse: 50 mm / 100 mm
Zuladung
Typ Ausleger, 3-Achsen Hub X-Achse: 200 mm / Y-Achse: 200 mm / Z-Achse: 50 mm / 100 mm Z-Achse: 2 kg
Modellspezifikation Serie Typ Enkoder XY-Achsenhub Z-Achsenhub Option
(Beispiel) TT - C3 - I - 2020 - 05B - DV
Modell/Spezifikation
Achs- Steigung Hub Geschwindigkeit Zuladung
Modell Enkoder Motor (kg)
konfiguration (mm) (mm) (mm/s) (Hinweis 1)
X-Achse 6 200 1-300 -
-
TT-C3-I-2020- Y-Achse Inkremental Schrittmotor 6 200 1-300 -
Z-Achse 6 50/100 1-300 (Hinweis 2) 2
* geben in der oben aufgeführten Modellbezeichnung den Z-Achshub, beziehungsweise die einsetzbare(n) Option(en) an
und
Optionen Technische Daten
Bezeichnung Modell Antrieb Kugelumlaufspindel (ø10 mm, gerollt C10)
DeviceNet Anschluss DV Wiederholgenauigkeit ±0,02 mm
CC-Link Anschluss CC Spiel (Hinweis 3) 0,1 mm oder kleiner
ProfiBus Anschluss PR Führung Direkt-gekoppelt, Kugelumlauf
Ethernet Anschluss ET Zulässiges Lastmoment (Hinw. 4) Ma: 6,5 Nm; Mb: 9,3 Nm; Mc: 16,4 Nm
Montagefuß FT Umgebungstemperatur/Feuchtigkeit 5 bis 40°C, 85% relative Feuchtigk. max. (nicht kondens.)
Gewicht 18 kg
Abmessungen
* Beim Referenzfahren verfährt der 13.6
Schlitten zum mechanischen Anschlag. 30 Xst:200
Deshalb ist auf mögliche Kollision mit 2.5 2.5
der Peripherie zu achten. ME SE HOME ME
SE: Hubende ME
26
ME: Mechanischer Anschlag SE
2.5
37.4 4-M4, 8 tief
4-M5, 10 tief 30
60
40
2-Ø4H7, 5 tief
Yst:200
Positioniersteller
50
40
für Z-Schlitten
30
42
50
120
HOME
4-M4, 8 tief
ME 2-Ø4H7, 5 tief 4-M5, 10 tief
2.5
84
Montagebohrungen für Z-Achsschlitten
Ø5
Bohrung Ø8
99.8 (149.8 if Zst = 100)
71
37.4
1
197.8 (247.8 if Zst = 100)
51.8
Zst:50 (or 100)
ME
2.5
HOME
Positioniersteller
50
50
58
SE
2.5
Positioniersteller Positioniersteller 4.3 1.8
10
für X-Schlitten ME
für Y-Schlitten
46
4.3
7.3
156
124.5
317
T-Nut (4 Positionen)
50
5 60 41.8 Einzelheit T-Nut
49
1.5
85
8
10.6 310 10 30 148.8 45 135 45 1.2
(34) 330.6 42 405
Einsetzbare Steuerungen
(Hinweis 1) Die Zuladung gilt für den Betrieb mit Beschleunigung
Einsetzbare Max. Anzahl an- Geeigneter Versorgungs- 0,3 G.
Steuerungen steuerbarer Achsen Enkoder Programme spannung Seite
(Hinweis 2) Bei Hublänge 50 mm wird die max. Geschwindigkeit auf
Eingebaut 3 Achsen Inkremental 64 230 V 15 Grund des verkürzten Hubs auf 280 mm/s begrenzt.
Achtung (Hinweis 3) Trifft für alle X- oder Y-Achsen zu.
(Hinweis 4) Das Lastmoment stellt einen achsbezogenen Wert für
eine Lebensdauer von 5.000 km dar. (siehe Last-
momente auf S. 19)
13 TT-C3-2020TT Tabletop Roboter
TT-C3-4040 Tabletop-Roboter/ Ausleger 3 Achsen
XY-Achsen: 400 mm Z-Achse: 50 mm / 100 mm
Zuladung Z-Achse: 2 kg
Typ Ausleger, 3-Achsen Hub X-Achse: 400 mm / Y-Achse: 400 mm / Z-Achse: 50 mm / 100 mm
Modellspezifikation Serie Typ Enkoder XY-Achsenhub Z-Achsenhub Option
(Beispiel) TT - C3 - I - 4040 - 05B - DV
Modell/Spezifikation
Achs- Steigung Hub Geschwindigkeit Zuladung
Modell Enkoder Motor (kg)
konfiguration (mm) (mm) (mm/s) (Hinweis 1)
X-Achse 6 400 1-300 -
-
TT-C3-I-4040- Y-Achse Inkremental Schrittmotor 6 400 1-300 -
Z-Achse 6 50/100 1-300 (Note 2) 2
* geben in der oben aufgeführten Modellbezeichnung den Z-Achshub, beziehungsweise die einsetzbare(n) Option(en) an
und
Optionen Technische Daten
Bezeichnung Modell Antrieb Kugelumlaufspindel (ø10 mm, gerollt C10)
DeviceNet Anschluss DV Wiederholgenauigkeit ±0,02 mm
CC-Link Anschluss CC Spiel (Hinweis 3) 0,1 mm oder kleiner
ProfiBus Anschluss PR Führung Direkt-gekoppelt, Kugelumlauf
Ethernet Anschluss ET Zulässiges Lastmoment (Hinw. 4) Ma: 6,5 Nm; Mb: 9,3 Nm; Mc: 16,4 Nm
Montagefuß FT Umgebungstemperatur/Feuchtigkeit 5 bis 40°C, 85% relative Feuchtigk. max. (nicht kondens.)
Gewicht 37 kg
Abmessungen
* Beim Referenzfahren verfährt der
Schlitten zum mechanischen Anschlag. 13.6
Deshalb ist auf mögliche Kollision mit 30 Xst:400
der Peripherie zu achten. 2.5 2.5
SE: Hubende ME ME SE HOME ME
26
ME: Mechanischer Anschlag
SE
2.5
37.4
4-M5, 10 tief 30
60 4-M4, 8 tief
40
Yst:400
2-Ø4H7, 5 tief
50
40
Positioniersteller
30
42
50
4-M5, 10 tief für Z-Schlitten
213.6
2-Ø4H7, 5 tief Ø5
4-M4, 8 tief Bohrung Ø8
HOME
Montagebohrungen für Z-Achsschlitten 1
ME
2.5
84
Positioniersteller
171
37.4 4.3 1.8
50 51.8
ME
Zst+49.8
2.5
(or100)
Zst:5
Zst+147.8
HOME
50
4.3
7.3
SE
2.5
10 58
Positioniersteller
für X-Schlitten Positioniersteller Einzelheit T-Nut
ME
46
für Y-Schlitten
Gleitstück
156
124.5
317
22
50 Gleitstück T-Nut (4 Positionen)
41.8
49
5 60
1.5
885
10.6 510 10 30 148.8 45 335 45 1.2
(44) 530.6 42 605
(Überstand Kabel)
Einsetzbare Steuerungen
(Hinweis 1) Die Zuladung gilt für den Betrieb mit Beschleunigung
Einsetzbare Max. Anzahl an- Geeigneter Versorgungs- 0,3 G.
Steuerungen steuerbarer Achsen Enkoder Programme spannung Seite
(Hinweis 2) Bei Hublänge 50 mm wird die max. Geschwindigkeit auf
Eingebaut 3 Achsen Inkremental 64 230 V 15 Grund des verkürzten Hubs auf 280 mm/s begrenzt.
Achtung (Hinweis 3) Trifft für alle X- oder Y-Achsen zu.
(Hinweis 4) Das Lastmoment stellt einen achsbezogenen Wert für
eine Lebensdauer von 5.000 km dar. (siehe Last-
momente auf S. 19)
TT-A3-4040 14Steuerungsspezifikation & E/A-Belegung
Technische Daten der Steuerung
Portal Ausleger
Position
2-Achsen 3-Achsen 2-Achsen 3-Achsen
Motortyp Schrittmotor
Positionserfassung Inkrementaler Enkoder
Versorgungsspannung 100 bis 115 VAC, 220 bis 230 VAC, einphasig, ±10%
Netzfrequenz 50 Hz / 60 Hz
Anschlussleistung Nennleistung: 151,2 W --- Maximale momentane Leistungsabgabe (2 mal)
Geschwindigkeitseingaben 1 bis 300 mm/s
Beschleunigungseingaben 0,01 bis 0,3 G
Programmiersprache IAI Super SEL
Programme - Anzahl 64 (16 im Multitasking)
Programmschritte - Anzahl 6000 (insgesamt)
Positionen - Anzahl 3000 (insgesamt)
Programmstart Separater digitaler Schalter + separater Startschalter oder digitale Eingänge
Datenspeicher FLASH ROM
Dateneingabe Handprogrammiergerät (Modell: IA-T-X)
PC-Software (Modell: IA-101-X-CW)
Eingänge/Ausgänge - Anzahl 16 Eingänge / 16 Ausgänge (getrennte digitale Ein-/Ausgänge)
Ein-/Ausgangsstecker 34 Pins / Flachbandkabel
Unterstützte Feldbus-Systeme DeviceNet / CC-Link / ProfiBus / Ethernet
Schutzausrüstungen Motorschutzschalter für Überstrom, Überlast, Temperatur-Überwachung in Motor/Antrieb, Erfassung offener Enkoderkreise, usw.
(Fehlercodes werden über eine 7-Segment-LED-Anzeige am Bedienpanel ausgegeben).
Umgebungstemperatur/Feuchtigkeit 0 bis 40°C, 20 bis 90% (nicht kondensierend)
Zubehör Netzanschlusskabel, Ein-/Ausgangsflachkabel
E/A-Signaltabelle
Pin Nr. Klasse Kanal-Nr.
1 24V - Stromversorgung E-/A 24 V
E/A-Flachkabel, Modell: CB-DS-PIO020
2 016 Universeller Eingang
2m
3 017 Universeller Eingang
4 018 Universeller Eingang
5 019 Universeller Eingang 2 1
6 020 Universeller Eingang
7 021 Universeller Eingang
8 022 Universeller Eingang Kein Stecker
9 023 Universeller Eingang
Eingang
10 024 Universeller Eingang
11 025 Universeller Eingang 34 33
12 026 Universeller Eingang
13 027 Flachkabel (34 Adern)
Universeller Eingang
14 028 Universeller Eingang
15 029 Universeller Eingang Nr. Farbe Kabel Nr. Farbe Kabel
16 030 Universeller Eingang 1 Braun 1 18 Grau 2
2 Rot 1 19 Weiss 2
17 031 Universeller Eingang
3 Orange 1 20 Schwarz 2
18 316 Universeller Ausgang 4 Gelb 1 21 Braun 3
19 317 Universeller Ausgang 5 Grün 1 22 Rot 3
20 318 Universeller Ausgang 6 Blau 1 23 Orange 3
7 Rosa 1 24 Gelb 3
21 319 Universeller Ausgang
8 Grau1 Flachkabel, 25 Grün 3 Flachkabel,
22 320 Universeller Ausgang Weiss 1 druckgeschweißt
9 26 Blau 3 druckgeschweißt
23 321 Universeller Ausgang 10 Schwarz 1 27 Rosa 3
24 322 Universeller Ausgang 11 Braun 2 28 Grau 3
25 323 Universeller Ausgang 12 Rot 2 29 Weiss 3
Ausgang 13 Orange 2 30 Schwarz 3
26 324 Universeller Ausgang
14 Gelb 2 31 Braun 4
27 325 Universeller Ausgang 15 Grün 2 32 Rot 4
28 326 Universeller Ausgang 16 Blau 2 33 Orange 4
29 327 Universeller Ausgang 17 Rosa 2 34 Gelb 4
30 328 Universeller Ausgang
31 329 Universeller Ausgang
32 330 Universeller Ausgang
33 331 Universeller Ausgang
34 0V - Stromversorgung E-/A 0 V
15 Tabletop Roboter TTE/A-Schaltpläne
Eingänge: Externe Eingänge (NPN) Ausgänge: Externe Ausgänge (NPN)
Parameter Spezifikation Parameter Spezifikation
Eingangsspannung 24 VDC +10%-15% Lastspannung 24 VDC
Eingangsstrom 7 mA/Schaltkreis Maximaler 100 mA / Kanal TD62084
EIN/AUS-Spannung EIN-Spannung---16.0 VDC min., AUS-Spannung---5.0 VDC max. Laststrom (oder gleichwertig)
400 mA, Spitze (voller Strom)
Entkopplung Optokoppler Kriechstrom 0.1 mA / max. Kanal
Extern [1] 0-Spannungskontakt (kleinste Last von ca. 5 VDC/1 mA) Entkopplung Optokoppler
angeschlossene [2] Photoelektrischer Näherungssensor (NPN) Extern angeschlos- [1] Miniaturrelais, [2] Sequentielles Eingangsmodul
Peripherie [3] Sequentieller Transistorausgang (offener Kollektor) sene Peripherie
[4] Sequentieller Kontaktausgang (kleinste Last von ca. 5 VDC/1 mA) P24*
[Ausgangskreis]
Interner Schaltkreis
[Eingangskreis] Überspannungs-
Dk schutz
P24* 10Ω Last
Interner Schaltkreis Ausgangs- Externe
anschluss + Spannungs-
Externe _ versorgung
Spannungs-
24VDC
+
versorgung 560Ω ±10%
_
24VDC
±10%
N*
3.3kΩ
Eingangsanschluß
*
P24 E/A-Modul Pin Nr. 1
*
P24 E//A Modul, Pin Nr. 1 N E/A-Modul Pin Nr. 34
Eingänge: Externe Eingänge (PNP) Ausgänge: Externe Ausgänge (PNP)
Parameter Spezifikation Parameter Spezifikation
Eingangsspannung 24 VDC ±10% Lastspannung 24 VDC
Eingangsstrom 7 mA/Schaltkreis Maximaler 100 mA / Kanal TD62784
EIN/AUS-Spannung EIN-Spannung---8.0 VDC min., AUS-Spannung---19.0 VDC max. Laststrom 400 mA/8 Kanäle (s. Hinweis) (oder gleichwertig)
Entkopplung Optokoppler Kriechstrom 0.1 mA/max./Kanal
Extern [1] 0-Spannungskontakt (kleinste Last von ca. 5 VDC/1 mA) Entkopplung Photocoupler insulation
angeschlossene [2] Photoelektrischer Näherungssensor (PNP) Extern angeschlos- [1] Miniaturrelais, [2] Sequentielles Eingangsmodul
Peripherie [3] Sequentieller Transistorausgang (offener Kollektor) sene Peripherie
[4] Sequentieller Kontaktausgang (kleinste Last von ca. 5 VDC/1 mA) Hinweis: 400 mA ist die maximale Gesamtlast für 8 Ausgänge von der Ausgangs-
kanalnummer 300 (maximaler gesamter Laststrom für Ausgangskanalnummer 300+n
bis Nummer 300+n+7 = 400 mA; bei dem n = 0 oder ein Vielfaches von 8 ist).
[Eingangskreis] [Ausgangskreis] P24*
Interner Schaltkreis
Eingangsanschluß
Überspannungs-
schutz
Interner Schaltkreis
10Ω
Externe
Spannungs- +
Ausgangs-
versorgung Externe
_ 560Ω anschluss Spannungs-
24VDC
+
±10% _ versorgung
24VDC
3.3kΩ Last ±10%
N*
*
N E//A Modul, Pin Nr. 34 *
P24 E/A-Modul Pin Nr. 1
N E/A-Modul Pin Nr. 34
Tabletop Roboter TT 16Optionen
DeviceNet-Anschluss CC-Link-Anschluss
Modell Modell
(Modellcode)-DV (Modellcode)-CC
Parameter Spezifikation Parameter Spezifikation
Anzahl E-/A-Kanäle Max. je 256 E- und A-Kanäle Anzahl E-/A-Kanäle Max. je 256 E- und A-Kanäle
Übertragungsstandard Schnittstellenmodul nach DeviceNet 2.0 Protokoll Übertragungsstandard CC-Link, Ver. 1.10 (nach Protokoll)
Übertragungsgeschwindigkeit 500K / 250K / 125K bit/s Übertragungsgeschwindigkeit 10M / 5M / 2,5M / 625K / 156K bit/s
Anzahl belegbarer Knoten 1 Knoten Stationstyp Fernstation
Steckverbinder (steuerungsseitig) MSTBA2.5/5-G-5.08-AUM von Phoenix Contact (*1) Anzahl belegbarer Stationen 1 bis 3 Stationen
*1 Kabelseitiger Stecker: SMSTB2.5/5-ST-5.08AU von Phoenix Contact (Standardzubehör) Steckverbinder (steuerungsseitig) MSTBA2.5/5-G-5.08-AUM von Phoenix Contact (*1)
*1 Kabelseitiger Stecker: SMSTB2.5/5-ST-5.08AU von Phoenix Contact (Standardzubehör)
ProfiBus-Anschluss Ethernet-Anschluss
Modell Modell
(Modellcode)-PR (Modellcode)-ET
Parameter Spezifikation Parameter Spezifikation
Anzahl E-/A-Kanäle Max. je 256 E- und A-Kanäle Netzwerkspezifikation 10BASE-T / 100BASE-T (Autoübertragung)
Übertragungsstandard Schnittstellenmodul nach ProfiBus DP1.10 Protokoll Übertragungsstandard IEEE 802.3
Übertragungsgeschwindigkeit 12M/1.5M/500K/187.5K/93.75K/19.2K/9.6K bit/s Übertragungsgeschwindigkeit 10M / 100M bit/s
Adresse des belegten Knotens 1 Adresse (1-99; programmierbar mit Drehsteller am Bedienpanel) Steckverbinder RJ-45
Steckverbinder (steuerungsseitig) D-sub, 9-pin-Stecker Kabel Kategorie 5 UTP verdrilltes Kabel
Montagefuß (4 Stück mit Schrauben und Muttern zur Befestigung am Antrieb)
Modell Abmessungen
TT-FT
20
8-Ø7 Bohrung
10
10 30 10
30 50
93
17 Tabletop Roboter TTHandprogrammiergerät 120 45
28
Modell Abmessungen
IA-T-X (Standard) IA-T-XD (mit Totmannschalter)
• Programmiergerät mit Programm-/Positionseingabe, Test-,
Überwachungs- und weiteren Funktionen.
• Einfache Bedienung des interaktiven Gerätes.
265
• Totmannschalter für zusätzliche Sicherheit einbaubar.
Parameter Spezifikation Hinweis
* Version 1.14 und früher können nicht
Betriebstemperatur, Feuchtigkeit Temperatur: 0 bis 40°C, Feuchtigkeit: 85% RLF max. bei der TT-Serie verwendet werden.
Einsatzumgebung Keine aggressiven Gase oder starke Staubeinwirkung
Gewicht ca. 650 g
Kabellänge 4m 90
Display LCD mit 20 Zeichen x 4 Zeilen
Handprogrammiergerät nach ANSI-/CE - Standard (nur für universelle Antriebe) 133 58.3
46.7
Modell Abmessungen
IA-T-XA
Handprogrammiergerät mit einem 3-Stellungsaktivierungs-
schalter nach ANSI-Standard mit CE-Zeichen. Der große
LED-Bildschirm und die interaktive Bedienerführung
255
erleichtern selbst dem weniger erfahrenen Bediener die
Programmierung des Roboters
Parameter Spezifikation Hinweis
* Version 1.14 und früher können nicht
Betriebsstemperatur, Feuchtigkeit Temp.: 0 to 40C, Feuchtigkeit: max. 85%RH (nicht kondensierend) bei der TT-Serie verwendet werden.
Schutzgrad IP54 (ohne Kabelsteckverbinder)
Gewicht Max. 600 g (ohne Kabel) 80
Kabellänge 5m
Display LCD mit 32 Zeichen x 8 Zeilen
PC Software (nur für Windows PCs)
Modell
IA-101-X-CW (PC-Version) * Für DOS-Version bitte bei IAI anfragen
Hinweis: Ab Version 4.0.0.0 ist Software kompatibel mit TT-Serie.
* Version 3.0.1.0 und früher können nicht bei der TT-Serie verwendet werden.
Inbetriebnahmesoftware mit Programm-/Positionseingabe,
Test-, Überwachungs- und weiteren Funktionen
• Die Software läuft unter Windows 95, 98, NT, 2000, ME
und XP.
• PC-Kabel, 5 m (Modell: CB-ST-9-25); optional mit
NOT-AUS-Anschluß (Modell: CB-ST-E1 MW050)
Inhalt
PC-Anschlusskabel CB-ST-9-25
Hinweis
Bestellnummer des Ersatzkabels für Wartung: CB-ST-9-25.
Bestellnummer des PC-Kabels zusammen mit der Not-Aus-
Beschaltung: CB-ST-E1 MW050.
Abmessungen
13 25
9
5
1
6
1
14
15 42 5m 48.5 15.5
2
mit NOT-AUS-Anschluss (Typ: CB-ST-E1MW050)
1
Tabletop Roboter TT 18Begriffsdefinitionen
Hinweise zu den Begriffen im Katalog
Geschwindigkeit "Geschwindigkeit" ist die programmierte Geschwindigkeit, mit der der Schlitten verfährt.
Der Schlitten startet aus der Ruhelage. Wenn die programmierte Geschwindigkeit erreicht ist, verfährt
der Schlitten mit dieser Geschwindigkeit bis kurz vor die Zielposition (programmierte Position), von der
der Schlitten dann bis zum Stillstand abgebremst wird.
Beschleunigung/ "Beschleunigung" ist die Geschwindigkeitsänderung aus dem Ruhezustand bis zum Erreichen der
Geschwindigkeit. "Verzögerung" ist die Geschwindigkeitsänderung von der programmierten
Verzögerung Geschwindigkeit bis zum Stillstand des Schlittens.
Beschleunigung und Verzögerung werden in "G" (0,3 G = 2940 mm/s2) angegeben.
Einschaltdauer IAI empfiehlt, die Antriebe mit einer Einschaltdauer von 50% oder darunter als Richtwert für
Lebensdauer und Genauigkeit zu betreiben.
Verfahrzeit
Einschaltdauer (%) = X100
Verfahrzeit + Ruhezeit
Wiederhol- "Wiederholgenauigkeit" ist die Positioniergenauigkeit, mit der der Antrieb eine programmierte Position
anfährt. Sie ist nicht mit der "absoluten Positioniergenauigkeit" zu vergleichen.
genauigkeit
Referenzpunkt Der Referenzpunkt befindet sich bei den Antrieben in Standardausführung auf der Motorseite. In der Ausführung
mit entgegengesetztem Referenzpunkt liegt dieser Punkt auf der dem Motor gegenüberliegenden Seite.
Während des Referenzpunktfahrens bewegt sich der Schlitten bis zum mechanischen Anschlag und ändert
dann seine Richtung. Achtung: Gefahr der Kollision mit peripheren Geräten.
Zulässige Das Lastmoment wird auf Basis einer Lebensdauer von 5.000 km berechnet. Hinweis: Wenn das
Nennmoment überschritten wird, verringert sich die Lebensdauer der Führung. Die Wirkrichtung der
Lastmomente Momente und die zugehörigen Referenzpunkte sind aus der unten abgebildeten Zeichnung ersichtlich.
(Ma, Mb, Mc)
X-Achse
X-Achse:
Richtung Mb
Y-Achse:
Richtung Ma
Z-Achse:
Richtung Mc 36
Y-Achse Z-Achse
Y-Achse: Referenzpunkt für
Richtung Mb Ma-Moment der Z-Achse
Z-Achse: Z-Achse:
Richtung Mb Richtung Ma
Y-Achse:
Richtung Mc
86 Referenzpunkt für
Ma-Moment der Y-Achse
X-Achse: X-Achse:
Richtung Mc Richtung Ma
67.5
Referenzpunkt für
Ma-Moment der X-Achse
19 Tabletop Roboter TTBewegung mit Druckbetrieb
Während der Bewegung mit Druckbetrieb kann die TableTop-Diagramm für Schub-(Druck-)Kraft und Stromgrenzwert
Schubkraft frei gewählt werden mittels Veränderung des
100
Stromgrenzwerts der Steuerung. Bitte benutzen Sie für die
Schubkraft-Anforderung das nebenstehende Diagramm. 90
80
Bitte beachten Sie folgendes im Druckbetrieb-Modus:
70
Schubkraft (N)
1. Der PUSH-(Duck-)Befehl bezieht sich nur auf eine Achse. 60
Mehr Achsen können nicht im Druckbetrieb-Modus verfahren werden.
50
2. Die Gegenkraft zur Achse im Druckbetrieb-Modus sollte 40
weniger als 80 % der im Katalog angegebenen zulässigen
Lastmomente zu jeder Achsrichtung betragen. 30
20
3. Zur Bewegung der Z-Achse im Druckbetrieb bitte den Portal-Typ
verwenden. Bei Nutzung der Z-Achse des Ausleger-Typs im Druck- 10
betrieb berücksichtigen Sie bitte die zulässigen x/y-Lastmomente.
0
20 25 30
Stromgrenzwert (%)
Programmierung
Super SEL Sprache
Die Super SEL-Sprache ist die einfachste von den heutzutage existierenden Robotersprachen. Mit dieser Sprache
wurde auf problemlose Weise die "uralte" Herausforderung gelöst, hoch entwickelte Steuerungsfunktionen in einer
einfachen Sprache einzubetten.
Die Super SEL-Sprache arbeitet mit der Schrittmethode, in der alle Schritte einzeln nacheinander von oben
abgearbeitet werden. Da die Befehle in der Reihenfolge der auszuführenden Arbeitsschritte eingegeben werden,
kann auch ein weniger erfahrener Bediener das notwendige Programm erstellen.
Die Programmierung in der Super SEL-Sprache beruht auf zwei Datentypen: Den „Programmdaten“ für die
Achsbewegungs- und Kommunikationsbefehle, unter anderem für den externen Datenaustausch, sowie den
„Positionsdaten“ mit den Zielpositionen, zu denen die einzelnen Achsen verfahren.
Bis zu 6000 Schritte mit den dazugehörigen Programmdaten können eingegeben und diese Befehlschritte in
maximal 64 einzelne Programme unterteilt werden.
Bis zu 3000 Positionen können abgelegt werden; jede Position beruft sich auf Daten welche alle drei Achsen
einbeziehen.
Zum Verfahren der einzelnen Achsen wird nur ein Verfahrbefehl in den Programmdaten eingegeben und die
Nummer entsprechend der erforderlichen Positionsdaten festgelegt. Die Achse verfährt nun zu der Position, die
unter der eingegebenen Positionsdatennummer abgespeichert ist.
Programmdaten Positionsdaten
Tabletop Roboter TT 20Programmbeispiel 1 Löten
Ablaufschema
Eingeben der Lötpositionen als Positionsdaten und Verfahren des Lötkopfes (an der Z-Achse montiert) mit
einem Programm, in dem die eingegebenen Positionen sequentiell abgelegt sind.
Schrittfolge
P11 P1 P11 P12 P2 P12 P13 P3 P13
P1 P8 P14 P4 P14 P15 P5 P15 P16 P6 P16
P17 P7 P17 P18 P8 P18 (Zurück zu P11)
P2 P7
P11 P12 P17 P18
X-Achse P13 P14 P15 P16
P3 P6
Z-Achse
P4 P5 P1 P2 P7 P8
P3 P4 P5 P6
Y-Achse Y-Achse
Draufsicht auf die Leiterplatte Seitenansicht der Leiterplatte
Positionsdaten
X-Achse Y-Achse Z-Achse X-Achse Y-Achse Z-Achse
P1 10 150 50 P11 10 150 0
P2 20 140 50 P12 20 140 0
P3 30 150 50 P13 30 150 0
P4 40 140 50 P14 40 140 0
P5 40 110 50 P15 40 110 0
P6 30 100 50 P16 30 100 0
P7 20 110 50 P17 20 110 0
P8 10 100 50 P18 10 100 0
Programm
Schritt Erweiterung Eingabe Befehl Operand 1 Operand 2 Ausgabe Beschreibung
1 HOME 100 Referenzfahren nur Z-Achse
2 HOME 11 Referenzfahren X- und Y-Achsen
3 VEL 100 Eingeben Geschwindigkeit 100 (mm/s).
4 ACC 0.3 Eingeben Beschleunigung 0,3 G
5 TAG 1 Zielsprung GOTO 1 (gehe zu) in Schritt 32
6 WTON 16 Stop bis Starttaste Eingang 16 aktiv
7 MOVP 11 Verfahren auf oben genannte Position 1 (= Pos.11)
8 MOVP 1 Verfahren (abwärts) zur Position 1
9 TIMW 3 Halt für 3 Sekunden
10 MOVP 11 Verfahren (aufwärts) zur Position 11
11 MOVP 12 Verfahren auf oben genannte Position 2 (= Pos.12)
12 MOVP 2 Verfahren (abwärts) zur Position 2
13 TIMW 3 Halt für 3 Sekunden
14 MOVP 12 Verfahren (aufwärts) zur Position 12
28 MOVP 18 Verfahren zur oben spezifizierten Position 8 (= Pos. 18)
29 MOVP 8 Verfahren (abwärts) zur Position 8
30 TIMW 3 Halt für 3 Sekunden
31 MOVP 18 Verfahren (aufwärts) zur oben spezifizierten Pos. 18
32 GOTO 1 Springen zum TAG 1
33
34
21 Tabletop Roboter TTBeispiel 2 Beschichten
Ablaufschema
Beschichten einer Platte mit Dichtungsmittel gemäß der unten abgebildeten Schrittfolge.
Der Antrieb verfährt ohne Unterbrechung ohne Halt von Position 1 zu Position 9 nach der Schrittfolge
Schrittfolge
P10 P1 P2 P3 P2 P4 P5 P6 P7 P8 P9
* Verfahren von P1 zu P9 ohne Halt
P1 P8 P5
P4
P9
X-Achse P7 P6
P10
P2 P3 Z-Achse
P1
Y-Achse Y-Achse
Draufsicht der Platte Seitenansicht der Platte
Positionsdaten
X-Achse Y-Achse Z-Achse
P1 10 150 50
P2 40 150 50
P3 40 70 50
P4 10 70 50
P5 10 90 50
P6 20 90 50
P7 20 130 50
P8 10 130 50
P9 10 150 50
P10 10 150 0
Programm
Schritt Erweiterung Eingabe Befehl Operand 1 Operand 2 Ausgabe Beschreibung
1 HOME 100 Referenzfahren nur Z-Achse
2 HOME 11 Referenzfahren X- und Y-Achsen
3 VEL 100 Eingeben Geschwindigkeit 100 (mm/s).
4 ACC 0.3 Eingeben Beschleunigung to 0.3 G
5 TAG 1 Zielsprung GOTO 1 in Schritt 11
6 WTON 16 Stop bis Starttaste Eingang 16 aktiv
7 MOVP 10 Verfahren zur oben spezifizierten Position 1 (= Pos. 10)
8 MOVP 1 Verfahren (abwärts) zur Position 1
9 PATH 2 9 Verfahren ohne Halt von Position 1 = Nullpunkt zur Pos. 9
10 MOVP 10 Verfahren zur oben spezifizierten Position 1 (= Pos. 10)
11 GOTO 1 Springen zum TAG 1
Tabletop Roboter TT 22TT-Serie
Katalog-Nr. 0206-D
Änderungen als Folge des technischen Providing quality products
Fortschritts vorbehalten since 1986
Seit mehr als 10 Jahren Ihr zuverlässiger
Partner für IAI-Produkte:
Schlüter Automation und Sensorik GmbH
Friedrichstr. 21 - D-79677 Schönau
Tel: +49 (0) 76 73 - 9 18 28 - 0 Fax: -50
Hotline: 0180-2-LINEAR*
(*6 ct./Anruf aus dem dt. Festnetz)
anfragen@schlueter-automation.de
www.linearachsensysteme.de
IAI, das IAI-Logo, RoboCylinder™, das RoboCylinder™-Logo, IntelligentActuator™ und das IntelligentActuator™-Logo sind Marken oder Produktnamen der IAI Corporation oder ihrer Tochtergesellschaften in den USA oder DeutschlandSie können auch lesen