Zustandsüberwachung von Bahn oberleitungen mit Kameradrohnen - ELIB-DLR
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
FAHRWEG
Zustandsüberwachung von Bahn
oberleitungen mit Kameradrohnen
Im vom BMVI geförderten Projekt SMARAGD untersuchen Siemens, DLR und Copting
luftgestützte Verfahren zur prädiktiven Instandhaltung der Bahninfrastruktur.
Rechte für einzelne Downloads und Ausdrucke für Besucher der Seiten
Homepageveröffentlichung unbefristet genehmigt für DLR /
genehmigt von DVV Media Group GmbH 2020
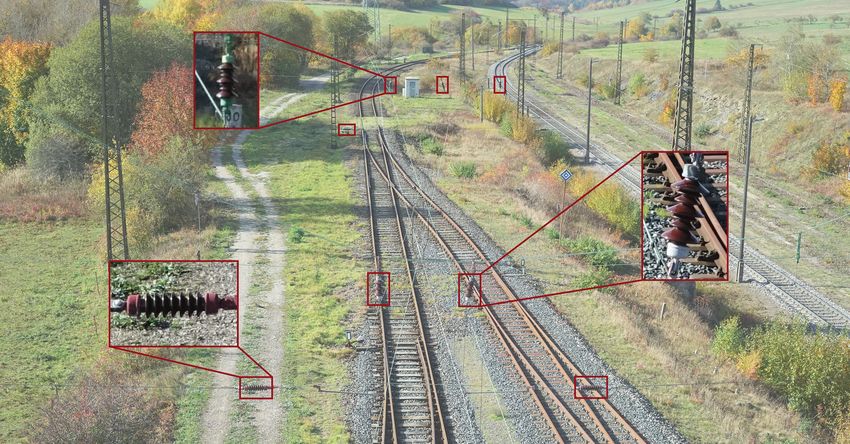
Abb. 1: Luftbildaufnahme einer Eisenbahnstrecke mit detektierten Isolatoren an der Oberleitung. Bei dem verwendeten System kann im Abstand
von 20 m eine Auflösung von 1 mm erreicht werden, im Abstand von 40 m etwa 2 mm. Details werden somit erkennbar. Quelle: DLR
FRANZ ANDERT | NILS KORNFELD | FLORIAN Einleitung des vor Ort wird die Zeitdauer von Strecken-
NIKODEM | HAIYAN LI | STEFAN KLUCKNER | Bauwerke der Eisenbahninfrastruktur, bei- sperrungen minimiert, da die Befliegungen
LAURA GRUBER | CHRISTIAN KAISER spielsweise Oberleitungen, müssen re- der Strecke wesentlich kürzer ausfallen als
gelmäßig einer Sichtprüfung unterzogen herkömmliche Begehungen zur Sichtprüfung.
werden. Um Einschränkungen im regulären Zudem können die schwer zugänglichen Ele-
Im Projekt SMARAGD wird untersucht, mit Betrieb zu vermeiden, werden diese Arbei- mente aus nahezu beliebigen Blickwinkeln
welchen Methoden unbemannte Luftfahr- ten oft als Wochenendarbeit oder Nacht- aufgenommen werden.
zeuge zur prädiktiven Instandhaltung schichten meistens zusammen mit Stre-
von Bahnoberleitungen eingesetzt wer- ckensperrungen ausgeführt und sind daher Projektziele
den können. Hierzu wird ein Multikopter personal-, zeit- und kostenintensiv. Heute
mit einem hochauflösenden Kamerasys- werden betriebsrelevante Elemente wie Iso- Motivation
tem ausgestattet und testweise über ver- latoren (Abb. 2) üblicherweise zyklisch zur Langfristiges Ziel ist es, sowohl die Beflie-
schiedenen Bahnstrecken eingesetzt. An- Risikominimierung ausgetauscht, wodurch gung als auch die Datenauswertung wei-
hand der Bilddaten lassen sich Elemente sich die Lebensdauer jedoch stärker als nö- testgehend zu automatisieren. Die mit Sen-
wie Isolatoren automatisch identifizieren tig reduziert. Dies gilt insbesondere für Ele- sorik ausgestatteten Luftfahrzeuge sollen
und verorten. Mithilfe von Künstlicher mente, die für Inspektion und Tausch nur in vordefinierten Abständen selbstständig
Intelligenz (KI) sollen die einzelnen Ele- schwer erreichbar sind. In Zukunft soll die die Bahninfrastruktur abfliegen und Daten
mente überwacht werden. Neben der Instandhaltung zustandsorientiert, bis hin aufnehmen. Anschließend werden die Da-
Entwicklung von Detektionsalgorithmen zur Vorhersage des Abnutzungsverhaltens, ten automatisch auf die zu untersuchenden
wird untersucht, welche Genauigkeit mit erfolgen. Letzteres wird auch als predictive Elemente überprüft. Mithilfe einer geeig-
Kamera- und Videodaten erreicht wer- health management (PHM) bezeichnet. neten Mustererkennungssoftware können
den kann. Da die Befliegung von Bahn- Eine automatische Befliegung mit unbemann- automatisch Defekte und Veränderungen in
strecken nicht ohne weiteres erlaubt ist, ten Luftfahrzeugen kann zu einer erheblichen den Scandaten erkannt und lokalisiert wer-
untersucht das Projekt rechtliche und or- Reduzierung der Kosten bei gleichzeitiger den. Dazu werden die Bildaufnahmen aus
ganisatorische Aspekte zum sicheren Be- Verbesserung der Diagnosegüte beitragen. vergangenen Wartungsflügen mit den aktu-
trieb von unbemannten Luftfahrzeugen. Neben der Reduzierung des Personalaufwan- ellen Aufnahmen übereinander gelegt und
10 EI | MAI 2020
FAHRWEG
Rechte für einzelne Downloads und Ausdrucke für Besucher der Seiten
Homepageveröffentlichung unbefristet genehmigt für DLR /
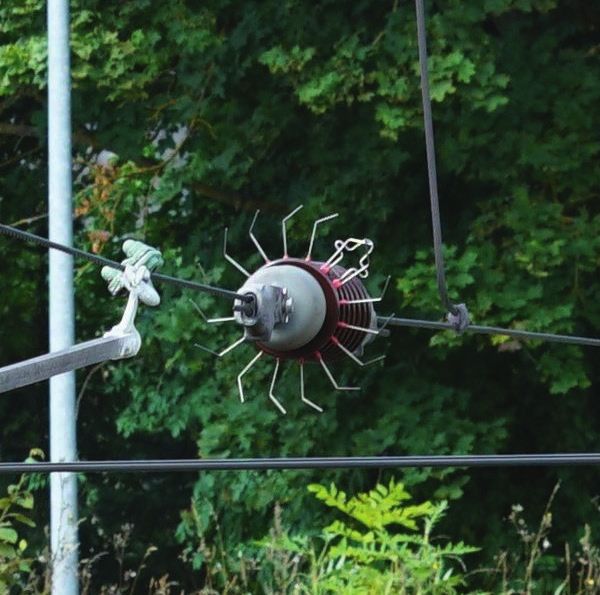
Abb. 2: Abplatzung an einem Isolator. Diese und weitere Schäden sollen durch Befliegungen automatisch erkannt werden.
Quelle: DB Netz AG Bereich Oberleitung Braunschweig
genehmigt von DVV Media Group GmbH 2020
zusätzlich mit den Bildern aus einer Refe- Inhalt des Projekts GmbH eigens für dieses Projekt konfigurier-
renzdatenbank verglichen. Bei signifikanten Die Erkennung der zu untersuchenden Objek- ter Multikopter, der mit einer beweglichen
Änderungen in der Infrastruktur – z. B. Riss- te und die Klassifikation von verschiedenen und hochauflösenden Kamera (42 Megapi-
bildung, Rost und weitere Defekte – werden Zustands- und Schadensarten soll automa- xel) ausgestattet ist (Abb. 3). Hiermit wird die
die Ergebnisse dem Anwender automatisch tisiert werden. Hierzu werden verschiede- Qualität einer automatisierten Datenverar-
visualisiert und in aufgearbeiteter Form zur ne Verfahren zur automatischen Bild- und beitung zur Erkennung von Isolatoren unter
Verfügung gestellt. Diese automatische Aus- Videoanalyse erforscht. Im Projekt werden Realbedingungen untersucht. Die Erkennung
wertung und die entsprechende Visualisie- dabei zwei verschiedene Versuchsträger zur der Isolatoren erfolgt dabei mithilfe von Ver-
rung würden die Wartungsarbeitsschritte Befliegung von Eisenbahnstrecken ausgerüs- fahren der KI. Das zweite System ist ein han-
erheblich vereinfachen und beschleunigen. tet: Das erste System ist ein von der Copting delsüblicher Multikopter (DJI Mavic) mit ein-
Abb. 3: Copting TransformerUAV Hexacopter bei der Aufnahme von Oberleitungen Quelle: Copting GmbH
EI | MAI 2020 11
FAHRWEG
i Verwendung von Künstlicher Intelligenz
Die Objektdetektion erfolgt mit modernen Ver-
Genehmigungslage für den Betrieb unbemannter Luftfahrzeuge fahren der KI, sogenannten neuronalen Netzen
Der Betrieb unbemannter Luftfahrzeuge ist durch die Luftverkehrsordnung (LuftVO) regu- [1]. Bei dem hier eingesetzten Verfahren werden
liert und für den kommerziellen Einsatz grundsätzlich genehmigungspflichtig. In 2020 wird zunächst in einem gegebenen Bilddatensatz
eine Überarbeitung der rechtlichen Rahmenvorschriften erwartet, welche die Vorschläge Objekte in den Bildern manuell annotiert. Dies
der European Aviation Safety Agency [6] umsetzen soll. Hierzu gehört die Unterteilung von ergibt den Trainingsdatensatz mit Bildern und
unbemannten Luftfahrtmissionen in verschiedene Risikokategorien sowie Systematiken
den zu lernenden Annotationen. Das System
zur Bewertung und Vermeidung von Risiken [7]. Maßgeblich sind das Luftrisiko (z. B. durch
Verletzung von Lufträumen) und das Bodenrisiko (z. B. Flug über bewohntem Gebiet und in lernt dann selbstständig ein Modell mit den Pa-
der Nähe Kritischer Infrastruktur) in Abhängigkeit des Einsatzgebietes, den Eigenschaften, rametern der annotierten Objekte. Dieses Mo-
Fähigkeiten und Sicherheitssystemen des Luftfahrzeugs sowie weiteren organisatorischen dell kann nun verwendet werden, um Objekte
Maßnahmen zur Risikovermeidung. Aufgrund der Systematik zur Risikobewertung lassen in neuen Bildern automatisch zu identifizieren.
sich Standardszenarien wie das JARUS STS-01 [8] ableiten. Hier werden Bedingungen und Die Parameter in diesem Modell bestimmen die
Maßnahmen für den Flugbetrieb mit kleineren Luftfahrzeugen bis 3 m Durchmesser über typischen visuellen Eigenschaften der zu klas-
größere Entfernungen beschrieben, was den besonders riskanten Flug außer Sicht mit ein- sifizierenden Objekte auf unterschiedlichsten
schließt. Auf dieser Grundlage können damit Flüge an Bahnstrecken für entsprechend au-
torisierte Betreiber durchgeführt werden.
Abstraktionsebenen. Sie enthalten primitive
Eigenschaften wie Kanten oder Farben sowie
Rechte für einzelne Downloads und Ausdrucke für Besucher der Seiten
auch weitaus komplexere Formen und Muster
[2]. Ein weiterer Überblick zu aktuellen Imple-
mentierungen ist in [3] zu finden.
Die hierbei verwendete Netzarchitektur ist
ein Single Shot Detector [4], der mehrere
Homepageveröffentlichung unbefristet genehmigt für DLR /
Objekte in einem Bild gleichzeitig erkennen
kann und bei hohen Bildauflösungen und
größeren Objekten im Bild performant ist. Da-
mit die Objekte auch aus unterschiedlichen
Blickwinkeln identifiziert werden können,
genehmigt von DVV Media Group GmbH 2020
werden z. B. auch verdrehte und verzerrte
Originalbilder in die Lernphase einbezogen.
Letztendlich wurden ungefähr 44 000 Bilder
für das Training des Modells verwendet.
Um das Verfahren und das trainierte Modell
zu testen, wurde ein Testdatensatz von 5000
weiteren Bildern mit reduzierter Auflösung
sowie 243 voll aufgelöste Bilder aus den Flug-
Abb. 4: Beispiele zur Detektion von Isolatoren. Während aus einem idealen Blickwinkel eine versuchsdaten verwendet. Die Ergebnisse
Detektion mit sehr hoher Genauigkeit erkannt wird (links), ist die Detektion trotz Training des sind in Tab. 1 aufgelistet. Zur Bewertung die-
Modells unter bestimmten Blickwinkeln wesentlich schwieriger (rechts). Dieser Isolator wird auch nen die in der Statistik gebräuchlichen Klassi-
nach Herabsetzen von Klassifikationsschwellwerten nicht erkannt. Quelle: Siemens Mobility GmbH fikationsmaße Genauigkeit und Trefferquote.
Die sehr hohe Genauigkeit bedeutet, dass nur
etwa 2-3 % der detektierten Objekte keine Iso-
gebauter 4K-Videokamera. Mit den Daten aus te und damit höherer Objektauflösung wurde latoren darstellen. Im Gegensatz dazu bedeutet
den Befliegungen soll untersucht werden, verzichtet, um bei den Befliegungen mög- die Trefferquote, dass etwa 30 % der Isolatoren
inwieweit langfristig auch handelsübliche lichst viele Elemente erfassen zu können. Dies nicht gefunden werden. Neben der vergleichs-
Fluggeräte ohne spezielle Hardware für den stellt zunächst einen sinnvollen Kompromiss weise schlechteren Detektion bei größeren Ent-
Einsatz verwendet werden können. Ziel ist zwischen Auflösung und Vollständigkeit der fernungen zeigt Abb. 4 ein Beispiel, unter denen
die Aufbereitung von Videodaten, sodass sie erfassten Objekte dar, da der Zustand eines eine Detektion schwierig ist. Derartige Erkennt-
Einzelbilder aus einer Kamera mit wesentlich Isolators grundsätzlich erkennbar ist. nisse sind für die weitere Planung von Befliegun-
höherer Auflösung ersetzen können. Gelingt Bei der Objektdetektion sollen diejenigen gen von Bedeutung. Beispielsweise sollte eine
dies, können im kommerziellen Betrieb han- Bildregionen identifiziert werden, in denen bekannte Bahnstrecke so beflogen werden, dass
delsübliche und vergleichsweise günstige sich Isolatoren befinden. Aus einer automa- eine seitliche Ansicht der Isolatoren erreicht wird.
Fluggeräte eingesetzt werden. tischen Befliegung lassen sich damit die-
jenigen Bilder aussortieren, in denen keine Übertragung auf Videodaten
Automatisierte Bilddatenverarbeitung Isolatoren zu sehen sind. Zudem genügt es, mit geringerer Auflösung
Das verwendete Kamerasystem ermöglicht für weitere Verarbeitungsschritte nur die Im kommerziellen Betrieb kann es vorteilhaft
eine Objektauflösung von etwa 1 mm pro Pixel entsprechenden Bildregionen zu verwen- sein, handelsübliche und in großer Stückzahl
bei einem Abstand von 20 m zu einem Isolator den, womit sich die weiter zu prozessierende verfügbare Fluggeräte zu verwenden. Als Bei-
(Abb. 1). Auf Objektive mit höherer Brennwei- Datenmenge reduziert. spiel wird hier die Anwendung eines Multi-
kopters vom Typ DJI Mavic evaluiert. Wie
eine Vielzahl anderer Geräte ist dieses System
Anzahl Bilder Genauigkeit Trefferquote mit einer Kamera ausgestattet. Da sich die
Aufnahme von Einzelbildern oft nicht mit
5 mit reduzierter Auflösung ,98 ,72 ausreichender Präzision steuern lässt, wer-
243 Originalbilder ,968 ,7 den Videodaten für die weitere Auswertung
betrachtet. Idealerweise genügt dann eine
Tab. 1: Genauigkeit (Precision, mAP0.5) und Trefferquote (Recall) der Detektion objektnahe Befliegung der Bahnstrecke ohne
12 EI | MAI 2020
FAHRWEG
Rechte für einzelne Downloads und Ausdrucke für Besucher der Seiten
Homepageveröffentlichung unbefristet genehmigt für DLR /
genehmigt von DVV Media Group GmbH 2020
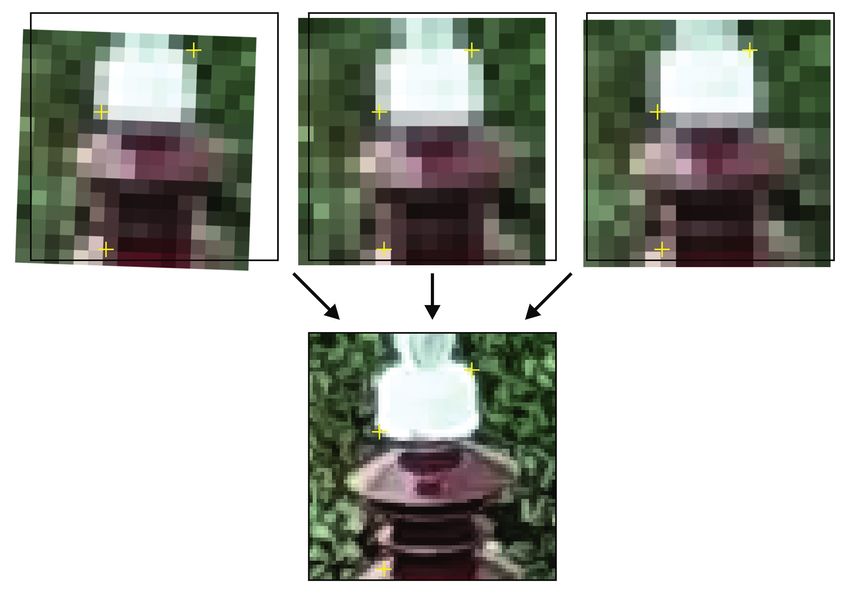
Abb. 5: Prinzip der Super-Resolution. Dabei wird die Transformation zwischen mehreren Bildern einer Sequenz auf Subpixelebene bestimmt und ein
fusioniertes Bild mit höherer Auflösung errechnet. Quelle: DLR
besondere Haltepunkte, was insbesondere on der Artefakte und zur Erhöhung der resul- vigation die Zuordnung hochgenauer Posi-
für längere Streckenabschnitte von Vorteil ist. tierenden Auflösung geforscht. tionsdaten zu den jeweiligen Einzelbildern.
Wesentlicher Nachteil der Videodaten ist Dies ermöglicht neben der Bewertung des
die geringere Bildauflösung im Vergleich zu Automatisierte Georeferenzierung Objektzustands aus verschiedenen Perspek-
den Spezialkameras sowie die Verwendung von erkannten Objekten tiven die Rekonstruktion von 3D-Informatio-
verlustbehafteter Datenkompression. Daher Das implementierte Flugmanagement er- nen. Mittels photogrammetrischer Verfahren
wird untersucht, inwieweit sich mehrere Ein- möglicht das Sammeln von Bild- und Video- werden die Aufnahmepositionen in genaue
zelbilder des Videos zu einem Gesamtbild hö- material aus unterschiedlichen Ansichten auf Relation zueinander gebracht und es wird die
herer Auflösung kombinieren lassen und ob die Objekte. Zudem erfolgt mit Satellitenna- 3D-Position der jeweiligen Objekte triangu-
ein derart errechnetes Bild auch tatsächlich
detailliertere Strukturen aufweist. Das Grund-
prinzip ist als Super-Resolution bekannt [5]
und in Abb. 5 dargestellt. Hierzu müssen sig-
nifikante Merkmale mehrerer Einzelbilder auf
Subpixelebene genau bestimmt werden.
Um den tatsächlichen Auflösungsgewinn zu
beurteilen, wurde mit dem Multikopter das
Bild eines Siemenssterns gefilmt und aus 16
Bildern der Sequenz ein Bild mit vierfacher
Auflösung berechnet. Abb. 6 zeigt das Ergeb- ¡ Ingenieur- und
nis. Hierbei ist einerseits die tatsächliche Erhö- Bahnvermessung
hung der Auflösung zu erkennen, andererseits Industriestraße 3
zeigen sich hier auch Artefakte am unteren
¡ UAV Vermessung 76189 Karlsruhe
Bildrand. Ursache können unter anderem In- ¡ Monitoring Tel. 0721 / 79072-0
formationsverluste durch Kompression der Fax 0721 / 79072-10
¡ 3D Modellierung info@it-geo.de
Eingangsbilddaten sein. Insgesamt überwiegt
allerdings der Nutzen dieser Technik. Derzeit ¡ Hydrographie www.it-geo.de
wird aktiv an Methoden zur weiteren Redukti-
EI | MAI 2020 13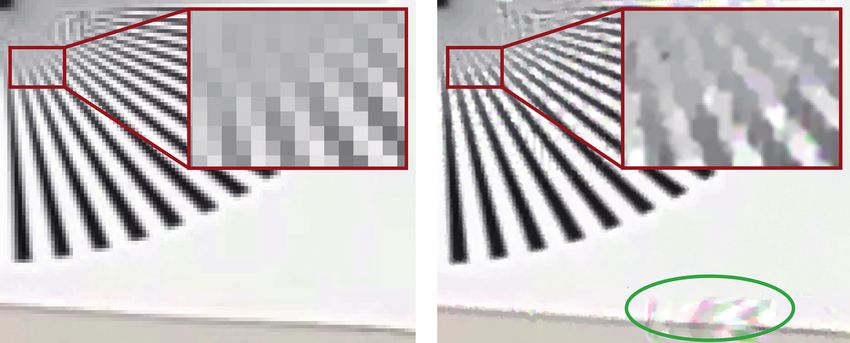
FAHRWEG
Rechte für einzelne Downloads und Ausdrucke für Besucher der Seiten
Abb. 6: Links: Beispielbild einer Videoaufnahme eines Siemenssterns. Rechts: Erstellung eines höher aufgelösten Bildes mittels Super-Resolution.
Homepageveröffentlichung unbefristet genehmigt für DLR /
Je nach Qualität der Eingabedaten können hier jedoch auch unerwünschte Artefakte entstehen. Quelle: DLR
[5] Mitzel, D. et al.: Video super resolution using duality based TV-L 1 optical
liert. Durch die genaue relative Lokalisierung flow. DAGM Joint Pattern Recognition Symposium, 2009, S. 432-441
können die Objekte damit eindeutig identifi- [6] European Aviation Safety Agency (EASA): Introduction of a regulatory
genehmigt von DVV Media Group GmbH 2020
ziert werden, wobei ein absoluter Positions- framework for the operation of drones. Technical Opinion, A-NPA 2015-10, 2015 Haiyan Li, M. Sc.
[7] Joint Authorities for Rulemaking of Unmanned Systems (JARUS):
fehler in Größenordnung der Satellitennavi- Guidelines on Specific Operations Risk Assessment (SORA). Online: http://
Softwareentwicklerin
gation von etwa 0,5 m bis 1 m verbleibt. Die jarus-rpas.org/sites/jarus-rpas.org/files/jar_doc_06_jarus_sora_v2.0.pdf, Siemens Mobility GmbH, Berlin
Zugriff am 02.03.2020, 17:00 Uhr haiyan.li.ext@siemens.com
georeferenzierten Bild- und Zustandsdaten
[8] Joint Authorities for Rulemaking of Unmanned Systems (JARUS): SORA
einzelner Objekte lassen sich damit automa- STS-01 for Aerial Work Operations, Version 1.1. Online: http://jarus-rpas.org/
tisiert mit Datenbanken abgleichen. sites/jarus-rpas.org/files/jar_doc_6_sora_sts_01_edition1.1.pdf, Zugriff
am 02.03.2020, 17:00 Uhr
Zusammenfassung
Im Projekt wurden mehrere Bahnstrecken zur
Bild- und Videodatenaufnahme beflogen. Die
Ergebnisse zeigen die Möglichkeiten einer au-
tomatisierten Bildauswertung. Hierbei können Dr.-Ing. Franz Andert Dipl.-Ing. Dr. techn. Stefan Kluckner
Isolatoren aus einer Entfernung von 20 m derart Gruppenleiter Sensorsysteme Abteilungsleiter Computer Vision and
identifiziert werden, dass der Zustand des Isola- Institut für Verkehrssystemtechnik Graphics Applications
tors erkennbar wird. Zudem kann gezeigt wer- Deutsches Zentrum für Luft- und Siemens Mobility GmbH, Berlin
den, dass unter guten Voraussetzungen auch Vi- Raumfahrt, Berlin stefan.kluckner@siemens.com
deodaten handelsüblicher Multikopter anstelle franz.andert@dlr.de
von hochaufgelösten Bildern verwendet werden
können. Daraus ergeben sich Anwendungsmög-
lichkeiten unter realen Einsatzbedingungen und
unter Verwendung von handelsüblicher Hard-
ware.
Die Arbeiten wurden durchgeführt im Rahmen Nils Kornfeld, M. Sc. Laura Gruber
des Verbundprojektes SMARAGD (Smart MAinta- Wissenschaftlicher Mitarbeiter Projektleiterin SMARAGD
nance of Rail infrastructure by using Analytical Institut für Verkehrssystemtechnik Business Development und Strategie
Georeferenced Data Services), gefördert vom Deutsches Zentrum für Luft- und im Customer Service
Bundesministerium für Verkehr und Digitale In- Raumfahrt, Berlin Siemens Mobility GmbH, Braun-
frastruktur (BMVI) mit der Forschungsinitiative nils.kornfeld@dlr.de schweig
mFund, Förderkennzeichen 19F2055B. laura.gruber@siemens.com
QUELLEN
[1] Howard, A. G. et al.: MobileNets: Efficient convolutional neural networks
for mobile vision applications. arXiv:1704.04861 [cs.CV], 2017
[2] Geirhos, R. et al.: ImageNet-trained CNNs are biased towards texture;
increasing shape bias improves accuracy and robustness. International Florian Nikodem, M. Sc. Dipl.-Inf. Christian Kaiser
Conference on Learning Representations (ICLR), 2019
[3] Huang, J. et al.: Speed/accuracy trade-offs for modern convolutional Wissenschaftlicher Mitarbeiter Geschäftsführer
object detectors. IEEE Conference on Computer Vision and Pattern Institut für Flugsystemtechnik Copting GmbH
Recognition (CVPR), 2017 Deutsches Zentrum für Luft- und ckaiser@copting.de
[4] Liu, W. et al.: SSD: Single shot multibox detector. European Conference on Raumfahrt, Braunschweig
Computer Vision (ECCV), 2016, S. 21-37
florian.nikodem@dlr.de
14 EI | MAI 2020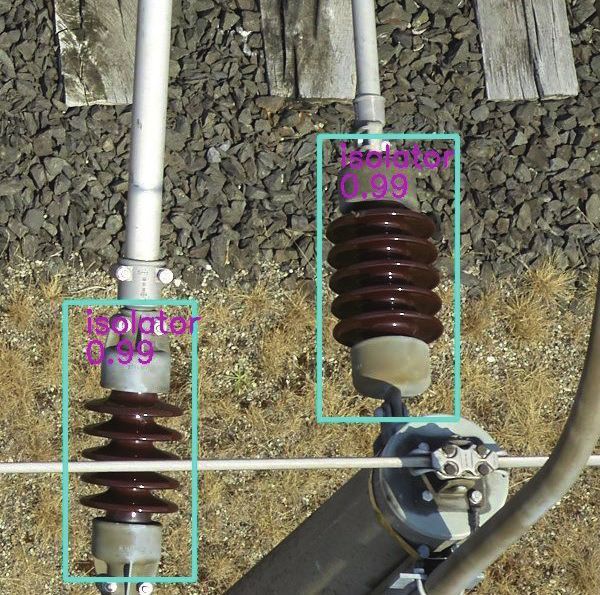


Sie können auch lesen

















































