Multi-fidelity Methodenvergleich für Rotor-analysen im VTOL-Transitionsflug
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Multi-fidelity Methodenvergleich für Rotor-
analysen im VTOL-Transitionsflug
Semesterarbeit
Wissenschaftliche Arbeit zur Erlangung des Grades
M.Sc. Aerospace an der Fakultät für Luftfahrt, Raumfahrt und Geodäsie
der Technischen Universität München.
Betreut von Prof. Dr.-Ing. Mirko Hornung
Moritz Thiele, M.Sc.
Lehrstuhl für Luftfahrtsysteme
Richard Kuchar, Dipl.-Ing.
Daniel Milz, M.Sc.
Marc May, M.Sc.
Deutsches Zentrum für Luft- und Raumfahrt (DLR)
Institut für Systemdynamik und Regelungstechnik
Eingereicht von Daniel Perdolt
Matrikelnummer: 03703004
Eingereicht am 15. April 2021
Laufende Nummer LS-SA 20/17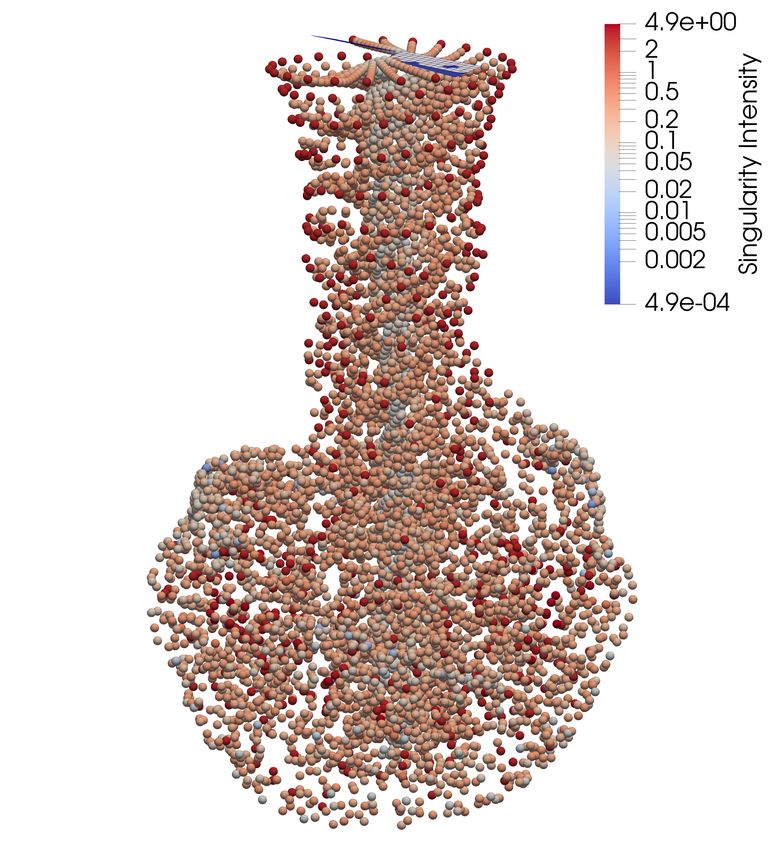
Kurzfassung Kurzfassung In dieser Arbeit wird ein Überblick über verschiedene Rotoraerodynamik-Tools gegeben und ein me- thodenübergreifender Vergleich durchgeführt. Der Vergleich wird für die Tools DUST, FLOWLab, SARF und OpenVSP/VSPAero durchgeführt und richtet sich an Anwendungen mit komplexen Rotor-Flügel Interaktionen, wie sie in vielen Urban-Air-Mobility Konzepten anzutreffen sind. Zu diesem Zweck wird der bekannte Caradonna-Tung Rotor in den verschiedenen Tools modelliert, mit experimentellen Da- ten verglichen und somit als Benchmark-Fall genutzt. Anschließend wird der Benchmark-Fall um einen Anwendungsfall, durchgeführt mit der Airbus A3 Vahana, erweitert. Für den VTOL-Transitionsfall der Vahana wird das Kippflügel-System in verschiedenen Flugzuständen in den betrachteten Tools ana- lysiert. Der Vergleich der Umsetzung und der Auswertung beider Fälle zeigt Möglichkeiten und Ein- schränkungen der Rotoraerodynamik-Tools. Darüber hinaus wird die Ergebnisqualität diskutiert und Besonderheiten der Handhabung und der Nutzung werden aufgezeigt. Es wurde gezeigt, dass die ver- wendeten Tools bei sorgfältiger Wahl der Rechenparameter genaue Ergebnisse bei verhältnismäßig geringem Rechenaufwand liefern. Schlagwörter: Rotor-Analyse; VTOL; Urban Air Mobility; Vahana, DUST, FLOWLab, SARF, OpenVSP, VSPAeroRotor Analysis, VTOL-UAV, UAV-Design, UAM Lehrstuhl für Luftfahrtsysteme | Technische Universität München I

Abstract Abstract In this paper, an overview of different rotor aerodynamic tools is given and a cross-method com- parison is performed. The comparison is performed for the tools DUST, FLOWLab, SARF and OpenVSP/VSPAero and addresses applications with complex rotor-wing interactions as found in many urban-air-mobility concepts. For this purpose, the well-known Caradonna-Tung rotor is modeled in the different tools, compared with experimental data and thus used as a benchmark case. Subsequently, the benchmark case is extended by a use case, carried out with the Airbus A3 Vahana. For the VTOL transition case of the Vahana, the tilt wing system is analyzed in different flight conditions. The com- parison of the implementation and evaluation of the two cases shows possibilities and limitations of the rotor aerodynamic tools. Furthermore, the quality of results and aspects of handling and use are discussed. It has been shown that the tools used, with careful choice of the simulation parameters, provide accurate results with relatively little computational effort. Keywords: Rotor Analysis; VTOL; Urban Air Mobility; Vahana, DUST, FLOWLab, SARF, OpenVSP, VSPAero Lehrstuhl für Luftfahrtsysteme | Technische Universität München II
Inhaltsverzeichnis
Inhaltsverzeichnis
Abbildungsverzeichnis VII
Tabellenverzeichnis VIII
Symbolverzeichnis IX
1 Einführung 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Zielsetzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Struktur der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Methoden und Anwendungsfälle 3
2.1 Zugrunde liegende Methoden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Vortex-Lattice-Methode (VLM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.2 Doublet-Lattice-Methode (DLM) . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.3 Vortex-Particle-Methode (VPM) . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.4 Methoden-Überblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Caradonna-Tung Rotor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1 Experimenteller Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.2 Erkenntnisse und Anwendung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Airbus A3 Vahana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3.1 Konzept und Aufgabenbereich . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.2 Technische Daten/Spezifikationen . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.3 Erkenntnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Rotoraerodynamik-Tools 13
3.1 DUST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.2 Workflow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.3 Modell-Generierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.1.4 Solver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1.5 Datenausgabe und Visualisierung . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2 FLOWLab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.2 Modell-Generierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2.3 Solver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2.4 Datenausgabe und Visualisierung . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 SARF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Lehrstuhl für Luftfahrtsysteme | Technische Universität München III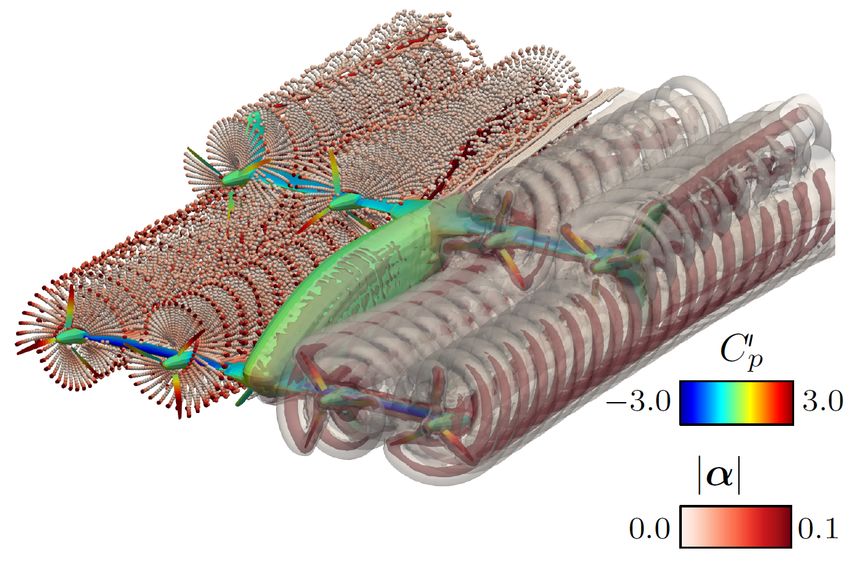
Inhaltsverzeichnis
3.3.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3.2 Modell-Generierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3.3 Solver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3.4 Datenausgabe und Visualisierung . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.4 OpenVSP/VSPAero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4.2 Modell-Generierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4.3 Solver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.4.4 Datenausgabe und Visualisierung . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4 Anwendung 27
4.1 DUST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1.1 Benchmark-Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.1.2 VTOL-Anwendungsfall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2 FLOWLab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2.1 Benchmark-Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2.2 VTOL-Anwendungsfall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3 SARF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.3.1 Benchmark-Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.3.2 VTOL-Anwendungsfall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.4 OpenVSP/VSPAero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.4.1 Benchmark-Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.4.2 VTOL-Anwendungsfall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5 Diskussion der Ergebnisse 57
5.1 Benchmark-Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2 VTOL-Anwendungsfall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.3 Möglichkeiten, Einschränkungen und Handhabung . . . . . . . . . . . . . . . . . . . . . 63
5.3.1 DUST . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.3.2 FLOWLab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.3.3 SARF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.3.4 OpenVSP/VSP-Aero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
5.4 Abschließender Vergleich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6 Zusammenfassung 68
6.1 Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.2 Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6.3 Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Lehrstuhl für Luftfahrtsysteme | Technische Universität München IV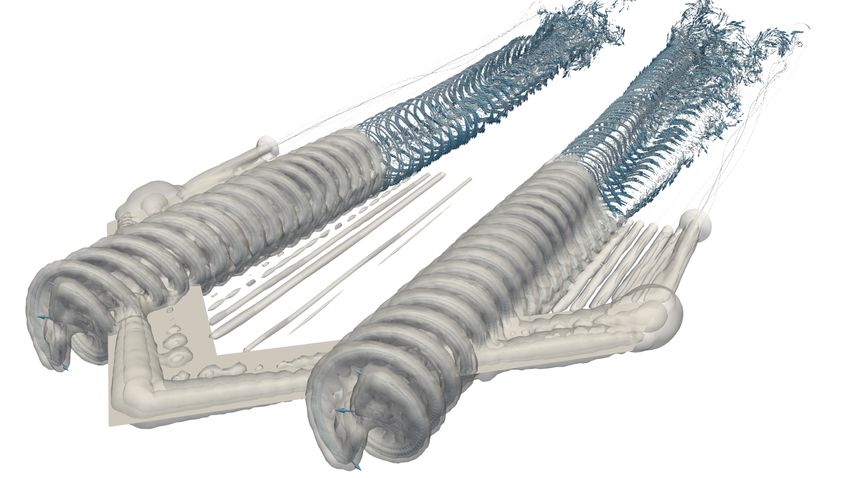
Inhaltsverzeichnis Literaturverzeichnis 70 A Anhang A-1 Lehrstuhl für Luftfahrtsysteme | Technische Universität München V
Abbildungsverzeichnis
Abbildungsverzeichnis
1.1 Airbus A3 Vahana, UAM-Konzept von Airbus (Acubed 16.12.2020). . . . . . . . . . . . . 1
2.1 Schematische Darstellung der Anwendung der VLM auf einer Tragfläche (Katz & Plotzkin
1991). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Unterteilung der Tragfläche durch trapezförmige Felder bei der „Doublet-Lattice-
Methode“ (Rodden et al. 1998). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 VPM zur Analyse von Multirotor-Konfigurationen (Alvarez & Ning 2019). . . . . . . . . . 6
2.4 Experimenteller Aufbau des Cardonna-Tung-Rotors (Caradonna & Tung 1981). . . . . . 8
2.5 Vahana Demonstrator (Airbus 15.12.2020). . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.6 Schematische Darstellung des Vahana (Acubed 16.12.2020). . . . . . . . . . . . . . . . 10
2.7 Technische Spezifikationen der Airbus Vahana (Airbus 15.12.2020). . . . . . . . . . . . 10
3.1 DUST: Visualisierung einer Kombination aus einem Flügelabschnitt mit zwei Rotoren
(Syal et al. 2020). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Beschreibung des allgemeinen Workflows von DUST (Montagnani et al. 2020). . . . . . 14
3.3 DUST: Parametrische Erstellung einer Geometrie (Montagnani et al. 2020). . . . . . . . 15
3.4 FLOWLab: Simulation eines Flügels mit zwei Rotoren im Reiseflug (Alvarez & Ning 2021). 17
3.5 Beschreibung des Workflows von FLOWUnsteady für Single- oder Multirotor-
Konfigurationen (Alvarez & Ning 2020). . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.6 FLOWLab: Modellierung eines APC 10x7 Rotorblatts (Alvarez & Ning 2018). . . . . . . . 20
3.7 SARF: Matlab-GUI für die automatisierte Erzeugung von Propeller-Geometrie-Objekten
(Laureys 10/2020). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.8 Zusammenfassung des SARF-Klassenmodells. . . . . . . . . . . . . . . . . . . . . . . . 22
3.9 Nachlaufgeometrie eines Tiger 17x5.8 Rotors. . . . . . . . . . . . . . . . . . . . . . . . 23
3.10 Diamond Aircraft DA42 aus dem OpenVSP-Hangar (OpenVSP 23.12.2020). . . . . . . . 24
3.11 OpenVSP: Workflow der Modell-Modifizierung (Stevens 2015). . . . . . . . . . . . . . . 25
4.1 DUST: Caradonna-Tung Rotor Geometrie. . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 DUST: Caradonna-Tung Rotor betrieben mit 2300 RPM. . . . . . . . . . . . . . . . . . . 29
4.3 DUST: Geometrie des Vahana mit allgemein möglichen Modellierungen der Komponen-
ten (Syal et al. 2020). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.4 DUST: Flugzustand der Vahana im Schwebeflug (Montagnani et al. 2019). . . . . . . . . 33
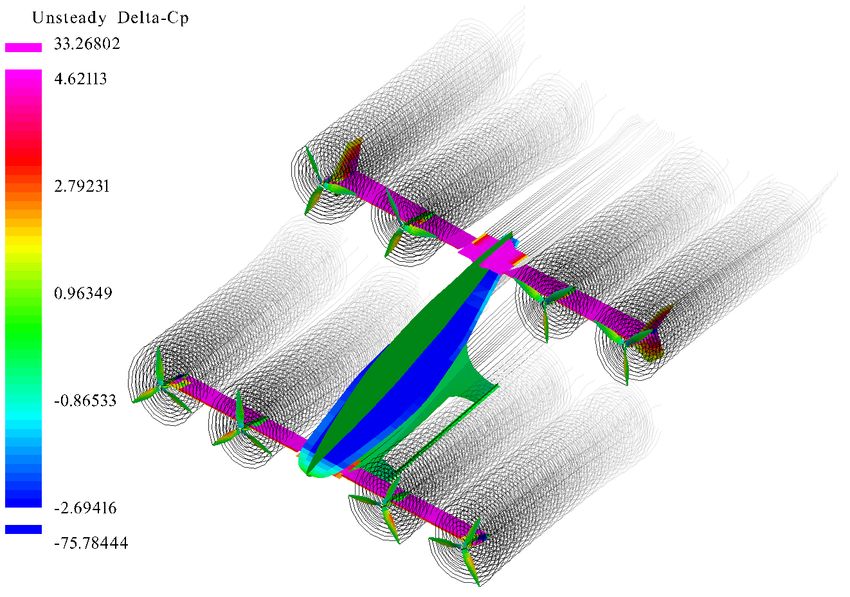
4.5 DUST: Flugzustand der Vahana in der Mid-Transition (Syal et al. 2020). . . . . . . . . . 34
4.6 DUST: Flugzustand der Vahana in der Late-Transition (Tugnoli et al. 2020). . . . . . . . . 35
4.7 DUST: Vergleich zwischen den in DUST und mit CFD erhaltenen Ergebnisse in Hinblick
auf den Auftrieb (a), die Gesamtwellenleitung (b) und dem Neutralpunkt (c) (Tugnoli et al.
2020). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Lehrstuhl für Luftfahrtsysteme | Technische Universität München VI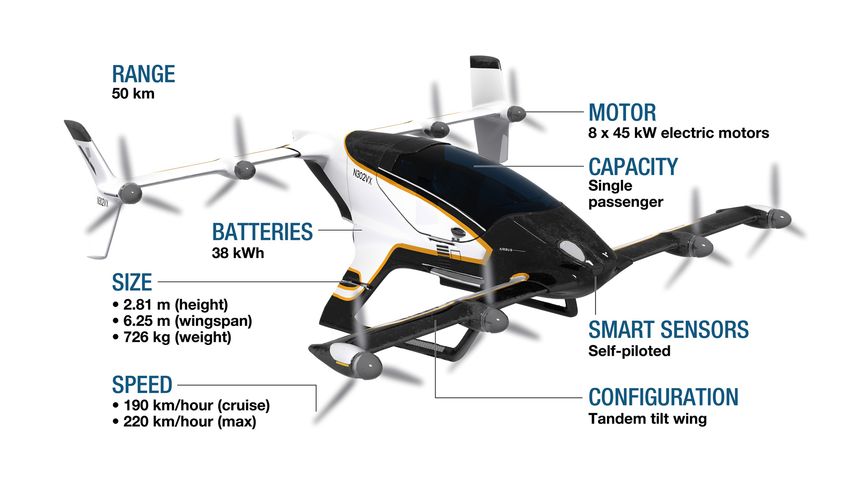
Abbildungsverzeichnis
4.8 DUST: Vergleich von den im Flug-Test, mit CFD-Simulationen und mit DUST-
Simulationen erhaltenen Gesamtwellenleistung für die drei Flugzustände der Vahana
(Tugnoli et al. 2020). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.9 FLOWLAB: Caradonna-Tung Rotor Geometrie erstellt mit Hilfe der FLOWLab-Tools. . . . 38
4.10 FLOWLab: Caradonna-Tung Rotor Visualisierung des Auftriebs. . . . . . . . . . . . . . . 39
4.11 Ermittlung der Rotoranstellwinkel ΘC für die behandelten Flugzustände (Tugnoli et al.
2020). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.12 FLOWLab: Vahana erstellt mit Hilfe der FLOWLab-Tools. . . . . . . . . . . . . . . . . . 42
4.13 FLOWLab: Vahana im Schwebeflug (a), in der Mid-Transition (b) und in der Late-
Transition (c). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.14 SARF: Caradonna-Tung Rotor Geometrie. . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.15 SARF: Caradonna-Tung Rotor betrieben mit 2300 RPM und 12° Rotoranstellwinkel. . . . 46
4.16 SARF: Vahana Rotor-Flügel Kombination Geometrie. . . . . . . . . . . . . . . . . . . . 48
4.17 SARF: Vahana im Schwebeflug (a), in der Mid-Transition (b) und in der Late-Transition (c). 49
4.18 Geometrie des Caradonna-Tung Rotors erstellt in OpenVSP. . . . . . . . . . . . . . . . 51
4.19 Caradonna-Tung Rotor visualisiert im OpenVSP-Viewer. . . . . . . . . . . . . . . . . . . 52
4.20 Geometrie der Vahana erstellt in OpenVSP. . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.21 OpenVSP/VSPAero: Vahana im Schwebeflug (a), in der Mid-Transition (b) und in der
Late-Transition (c). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.1 Validierung der Tools durch die experimentellen Daten des Caradonna-Tung Rotors. . . . 57
5.2 Methodenübergreifender Vergleich der C T -Werte des Caradonna-Tung Rotors. . . . . . 58
5.3 Methodenübergreifender Vergleich der C Q -Werte des Caradonna-Tung Rotors. . . . . . 59
5.4 Methodenübergreifender Vergleich der Figure of Merit F OM des Caradonna-Tung Rotors. 60
5.5 Vahana: Vergleich von C T , C Q und η , welche in FLOWLab, SARF und OpenVSP/VSPAe-
ro für die drei Flugzustände erhalten wurden. . . . . . . . . . . . . . . . . . . . . . . . . 61
5.6 Vahana: Änderung des Auftriebs am Haupt- und Canardflügel durch die Änderung des
Flugzustands analysiert mit FLOWLab. . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
A.1 DUST: vergrößerte des Darstellung Caradonna-Tung Rotor betrieben mit 2300 RPM und
ΘC = 12 °. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
Lehrstuhl für Luftfahrtsysteme | Technische Universität München VII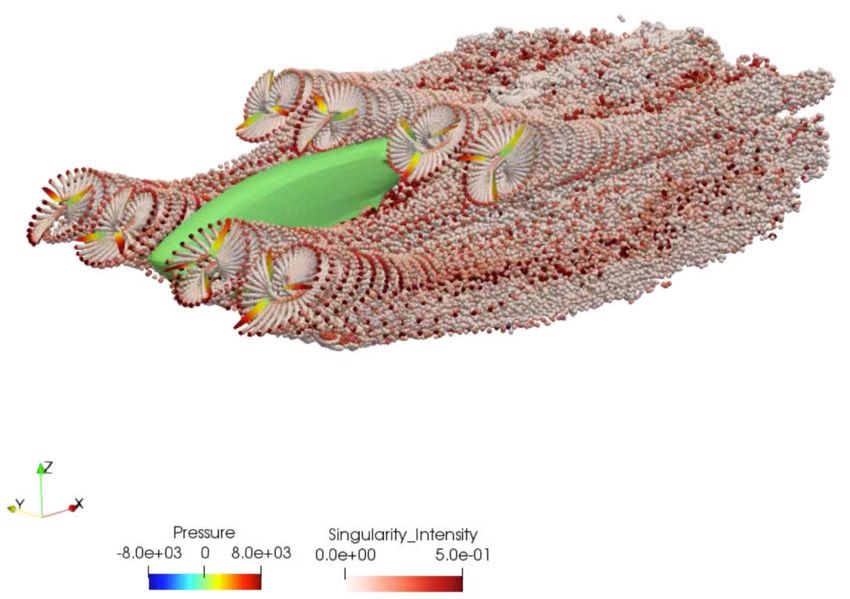
Tabellenverzeichnis Tabellenverzeichnis 2.1 Vergleich der Methoden zur Modellierungen des Nachlauf . . . . . . . . . . . . . . . . . 7 2.2 Caradonna-Tung Rotor: Parameter der experimentellen Durchführung . . . . . . . . . . 9 2.3 Vahana: Spezifikationen (Airbus 15.12.2020) . . . . . . . . . . . . . . . . . . . . . . . . 11 4.1 DUST: Caradonna-Tung Rotor Einstellungen . . . . . . . . . . . . . . . . . . . . . . . . 28 4.2 DUST: Ergebnisse Benchmark-Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 4.3 FLOWLab: Caradonna-Tung Rotor Einstellungen . . . . . . . . . . . . . . . . . . . . . . 38 4.4 FLOWLab: Ergebnisse Benchmark-Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 4.5 betrachtete Flugzustände des Vahana-Transitionsflugs . . . . . . . . . . . . . . . . . . . 41 4.6 FLOWLab: Ergebnisse der Vahana für einen einzelnen Rotor . . . . . . . . . . . . . . . 44 4.7 FLOWLab: Ergebnisse der Vahana Auftriebsflächen . . . . . . . . . . . . . . . . . . . . 44 4.8 SARF: Caradonna-Tung Rotor Einstellungen . . . . . . . . . . . . . . . . . . . . . . . . 45 4.9 SARF: Ergebnisse Benchmark-Fall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47 4.10 SARF: Ergebnisse der Vahana für einen einzelnen Rotor . . . . . . . . . . . . . . . . . 50 4.11 OpenVSP/VSP-Aero: Caradonna-Tung Rotor Geometrie Einstellungen . . . . . . . . . . 51 4.12 OpenVSP/VSP-Aero: Ergebnisse Benchmark-Fall . . . . . . . . . . . . . . . . . . . . . 53 4.13 OpenVSP/VSPAero: Ergebnisse der Vahana für einen einzelnen Rotor . . . . . . . . . . 56 5.1 Überblick der Rotoraerodynamik-Tools . . . . . . . . . . . . . . . . . . . . . . . . . . . 66 Lehrstuhl für Luftfahrtsysteme | Technische Universität München VIII
Symbolverzeichnis Symbolverzeichnis Abkürzungen . . . AR . . . . . . . . . . . . . . Aspect Ratio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) CAD . . . . . . . . . . . . Computer Aided Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) CFD . . . . . . . . . . . . Numerische Strömungssimulation (Computational Fluid Dynamics) . . . . . . . . . . . . (−) CFL . . . . . . . . . . . . . Courant-Friedrichs-Lewy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) DLM . . . . . . . . . . . . Doublet-Lattice-Methode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) FOM . . . . . . . . . . . . Figure of Merit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) LL . . . . . . . . . . . . . . . Lifting-Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) MTOW . . . . . . . . . . Maximum Takeoff Weight. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) SARF . . . . . . . . . . . Synthesis and Analysis of Rotors Framework . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) SP . . . . . . . . . . . . . . Surface Panels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) ST . . . . . . . . . . . . . . Strip Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) UAM . . . . . . . . . . . . Urban Air Mobility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) UBEM . . . . . . . . . . . Unsteady Blade Element Momentum Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) VLM . . . . . . . . . . . . Vortex-Lattice-Methode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) VPM . . . . . . . . . . . . Vortex-Partikel-Methode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) VTOL . . . . . . . . . . . Senkrechtstart- und landung (Vertical Take-Off and Landing) . . . . . . . . . . . . . . . . . . (−) Symbole . . . . . . . . Γk . . . . . . . . . . . . . . . Zirkulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (m2 /s) κ ................ induzierter Leistungsfaktor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) ν ................ kinematische Viskosität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (m2 /s) ω ................ Wirbelfeld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) ΩRotor . . . . . . . . . . . Rotor-Drehzahl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (RPM) ρ ................ Luftdichte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (kg/m3 ) σ ................ Rotor-Solidität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) ΘC . . . . . . . . . . . . . . Rotor-Anstellwinkel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (°) bk . . . . . . . . . . . . . . . Panel-Breite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (m) C D0 . . . . . . . . . . . . . Nullwiderstandsbeiwert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) CD . . . . . . . . . . . . . . Widerstandsbeiwert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) CL . . . . . . . . . . . . . . Auftriebsbeiwert. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) CM . . . . . . . . . . . . . . Momentbeiwert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) CP . . . . . . . . . . . . . . Leistungsbeiwert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) CQ . . . . . . . . . . . . . . Drehmomentbeiwert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) CT . . . . . . . . . . . . . . Schubbeiwert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) C ’P . . . . . . . . . . . . . . Druckbeiwert. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) L ................ Auftrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (N) Lk . . . . . . . . . . . . . . . Auftrieb, der auf einem Panel wirkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (N) n ................ Rotor-Drehzahl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (rev/s) Nb . . . . . . . . . . . . . . Anzahl an Rotorblättern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) nk . . . . . . . . . . . . . . . Normalvektor eines Panels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) u ................ Geschwindigkeitsfeld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (−) Lehrstuhl für Luftfahrtsysteme | Technische Universität München IX
1 Einführung
1 Einführung
Angetrieben von der stark zunehmenden Urbanisierung, dem extremen Verkehr in den Städten und
neuen Fortschritten in der Flugzeugtechnik und im Bereich der elektrischen Antriebe, entsteht eine
städtische Luftmobilität, genannt Urban Air Mobility (UAM), welche den Transport von Personen oder
Gütern über städtische Gebiete durch Luftfahrzeuge ermöglichen soll (Baur et al. 2018). Man schätzt,
dass die UAM-Branche bereits in 2050 einen jährlichen Umsatz von fast 90 Milliarden USD pro Jahr mit
160.000 kommerziellen Passagierdrohnen erzielen wird (Hader et al. 2020). In diesem Kontext muss
vor allem das Konzept VTOL genannt werden. Dieser Begriff steht für eine Fortbewegung mit vertikalem
Start und vertikaler Landung. Die Erweiterung um den Buchstaben „e“ weist auf einen Elektroantrieb
hin. Diese Lösungen sind in der Lage flexibel an fast beliebigen Orten zu starten und zu landen und
sollen sich hauptsächlich autonom, sprich ohne Piloten, fortbewegen (facc 05.01.2021). Ein Beispiel
einer eVTOL-Konfiguration wird in Abbildung 1.1 gezeigt.
Abbildung 1.1: Airbus A3 Vahana, UAM-Konzept von Airbus (Acubed 16.12.2020).
Dabei handelt es sich um die in dieser Arbeit analysierte Airbus A3 Vahana, ein eVTOL-Konzept vom
Airbus Innovationszentrum A3 und der Grundstein für kommende UAM-Projekte von Airbus.
1.1 Motivation
Der Entwurf von eVTOL-Konfigurationen stellt jedoch eine große Herausforderung dar. Aufgrund der
begrenzten Verfügbarkeit empirischer Daten und einer sehr komplexen Aerodynamik in Bezug auf
Rotor-Rotor-Flügel-Interaktionen müssen während der vorläufigen Entwurfsphase eine große Anzahl
an Simulationen durchgeführt werden. Daher ist der Bedarf an Tools, die die Interaktionen zwischen
Rotoren, Flügeln und Boden simulieren können und dabei eine schnelle und zuverlässige Analyse
mit minimaler manueller geometrischer Vorverarbeitung ermöglichen, sehr hoch. Die Entwicklung von
eVTOL-Steuerungsarchitekturen erfordert ein hinreichend genaues, aber flexibles aerodynamisches
Modell des Flugzeugs, welches alle relevanten aerodynamischen Wechselwirkungen und transiente
Effekte charakterisiert. Vor allem Multi-Rotor-Konfigurationen bringen eine starke aerodynamische und
aeroakustische Wechselwirkungen mit sich, die nicht mit herkömmlichen Flugzeugkonstruktion-Tools
erfasst werden können (Alvarez & Ning 2020). Der Einfluss des Nachlaufs der Rotoren auf andere
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 11 Einführung Rotoren oder Auftriebsflächen, bringen konventionelle Flugzeug Design Tools an Ihre Grenzen. So ver- sagen konventionelle Tools, die im Flugzeugdesign verwendet werden, meist bei der Vorhersage eines Transitions-Manövers (Alvarez & Ning 2021). Viele Konzepte sehen jedoch hybride Rotorsysteme vor, welche durch einen Kipprotor-Mechanismus über die ganze Trajektorie aus Schwebe-, Transitions- und Reiseflug Schub bereitstellen können. Trotz der jüngsten Fortschritte auf dem Gebiet der Hochleistungsrechner ist CFD immer noch zu re- chenintensiv, um die große Anzahl von aerodynamischen Simulationen durchzuführen, die während des Entwurfsprozesses von komplexen eVTOLs erforderlich sind. Daher stellen aerodynamische nu- merische Tools mit mittlerer Genauigkeit (medium fidelity) immer noch die beste Option dar, da sie einen optimalen Kompromiss zwischen dem Rechenaufwand einer Simulation und der gewünschten Genauigkeit der Ergebnisse bieten. (Tugnoli et al. 2020) 1.2 Zielsetzung Ziel der Arbeit ist es, über ausgewählte existente Methoden und Tools zur Rotoraerodynamik einen Überblick zu schaffen. Neben der Vorstellung und Beschreibung der Tools steht der Aufbau eines de- dizierten Benchmark-Falles, realisiert mit dem Caradonna-Tung Rotor (Caradonna & Tung 1981), im Vordergrund. Der Benchmark-Fall soll in den Tools umgesetzt werden, mit experimentellen Daten va- lidiert und methodenübergreifend verglichen werden. Anschließend gilt es, die Berechnung um den VTOL-Transitionsfall des Kipprotor-Systems der Airbus A3 Vahana (Acubed 16.12.2020) zu erweitern. Der Vergleich soll die Möglichkeiten der einzelnen Tools, die Handhabung und die Ergebnisqualität zeigen. Er soll jedoch auch Einschränkungen hervorheben. 1.3 Struktur der Arbeit Im ersten Abschnitt dieser Arbeit wird zunächst ein Überblick über die Methoden gegeben, welche in weiterer Folge in den Rotoraerodynamik-Tools Anwendung finden. Nachfolgend wird der für den Benchmark-Fall verwendete Caradonna-Tung Rotors und die Airbus A3 Vahana, welche als Anwen- dungsfall dient, vorgestellt. Anschließend werden in Kapitel 3 die Tools selbst vorgestellt, erklärt auf welchen Grundlagen sie basieren und wie damit gearbeitet wird. In Abschnitt 4 wird gezeigt, wie mit den vier Rotoraerodynamik-Tools der Benchmark und der Anwendungsfall umgesetzt werden. Dafür wird die Geometrie des Caradonna-Tung veranschaulicht, die Auswahl der Rechenparameter für die anschließende Simulation erläutert und die Ergebnisse sowohl visuell als auch tabellarisch darge- stellt. Analog dazu werden die Modellierung und die erhaltenen Kennwerte für drei Flugzustände des Transitions-Flugs der Vahana gezeigt. Die aus den Simulationen erhaltenen Ergebnisse werden in Ab- schnitt 5 mit den experimentellen Daten des Caradonna-Tung Rotors validiert. Im Anschluss an die Validierung werden die für den Benchmark- und den Anwendungsfall erhaltenen Kennwerte methoden- übergreifend verglichen. Aus dem Vergleich werden Möglichkeiten und Einschränkungen der einzelnen Tools abgeleitet und eine Bewertung in Bezug auf ihre Handhabung getroffen. Im abschließenden Ab- schnitt 6 werden die Ergebnisse zusammengefasst. Darüber hinaus wird ein Ausblick für die einzelnen Tools gegeben und ein Fazit gezogen. Lehrstuhl für Luftfahrtsysteme | Technische Universität München 2
2 Methoden und Anwendungsfälle
2 Methoden und Anwendungsfälle
Im ersten Abschnitt dieser Arbeit werden die zugrunde liegenden Methoden beschrieben, welche in
weiterer Folge in den Rotoraerodynamik-Tools Anwendung finden. Nachfolgend wird der Caradonna-
Tung Rotor (Caradonna & Tung 1981), verwendet für den Benchmark-Fall, und der Airbus A3 Vahana
(Acubed 16.12.2020), welcher als Anwendungsfall dient, vorgestellt.
2.1 Zugrunde liegende Methoden
Die Rotoraerodynamik-Tools, welche im Rahmen dieser Arbeit verglichen werden, arbeiten mit Ver-
fahren zur numerischen Lösung der aerodynamischen Kennwerte und Verteilungen. Die Methoden,
welche in den Tools verfügbar sind und welche auch im Benchmark bzw. Anwendungsfall verwendet
werden, werden nun erläutert.
2.1.1 Vortex-Lattice-Methode (VLM)
Die VLM geht von der von Prandtl in 1918 formulierten Liftig-Line Theorie (LL) aus (DeYoung 1976).
Ein Raster mit Hufeisenwirbeln (Vortex-Lattices) wurde erstmals in einer Arbeit von Falkner in 1943
beschrieben, aus welcher die Namensgebung „Vortex-Lattice Theory“ stammt (DeYoung 1976). Die
VLM wurde stetig erweitert, verbessert und wird umfassend in (Katz & Plotzkin 1991) und (Anderson
2001) beschrieben. Bei der VLM handelt es sich demnach um einen relativen einfachen Ansatz, welcher
auf der Potentialtheorie basiert und grundsätzlich durch eine Überlagerung einer endlichen Anzahl an
Hufeisenwirbeln, sogenannten „horseshoe vortices“, mit unterschiedlichen Wirbelstärken Γn realisiert
wird (Anderson 2001). In Abbildung 2.1a wird exemplarisch ein einzelner Hufeisenwirbel auf einem
Abschnitt einer Tragfläche gezeigt.
(a) einzelner Horseshoe-Vortex (b) Vortex-Lattice-System
Abbildung 2.1: Schematische Darstellung der Anwendung der VLM auf einer Tragfläche (Katz & Plotz-
kin 1991).
Die gestrichelte Linie definiert hierbei ein Panel auf der Oberfläche des Flügels. Nach der 1/4-3/4 Regel
von Pistolesi wird auf diesem Panel ein Hufeisenwirbel abcd mit der Stärke Γn so platziert, dass der
Abschnitt bc bei l/4 liegt. Darüber hinaus ist ein Kontrollpunk bei 3l/4 vorgesehen (Anderson 2001).
Die Geschwindigkeit, die an einem willkürlichen Punkt durch einen einzelnen Hufeisenwirbel induziert
wird, kann dann über das Gesetz von Biot-Savart, erläutert in (Anderson 2001), berechnet werden,
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 32 Methoden und Anwendungsfälle
indem jeder der Wirbelfäden ab, bc und cd einzeln betrachtet wird.
Nun betrachtet man einen ganzen Flügel in Abbildung 2.1b, welcher mit einer endlichen Anzahl an
Panels bedeckt ist. Jeder dieser Panels wird mit einem Hufeisenwirbel belegt und es entsteht ein Gitter
aus Hufeisenwirbeln, welche jeweils die Stärke Γn besitzen. An jeden willkürlichen Kontrollpunkt P kann
wiederum die Geschwindigkeit, die durch alle Hufeisenwirbel induziert wurde, über das Gesetz von
Biot-Savart bestimmt werden. (Anderson 2001) Über die Anwendung der Bedingung der tangentialen
Strömungsrichtung auf alle Kontrollpunkte, erhält man ein lineares Gleichungssystem, aus welchem die
unbekannten Wirbelstärken Γn berechnet werden können. (Anderson 2001)
Wenn die Zirkulationsstärken bekannt sind, können die resultierenden aerodynamischen Kräfte mit
dem Kutta-Joukowsky-Theorem berechnet werden (Kier et al. 2005):
Lk = nk · ρ · V TAS · Γk · bk (2.1)
Da es sich um eine Potentialströmung handelt, werden keine Reibungseffekte berücksichtigt. Die VLM
basiert auf der Lifting-Surface-Theorie und somit wird auch die Dicke des betrachteten Flügels bzw.
Rotors nicht abgebildet und die Druckverteilung auf dem Flügel ist nicht darstellbar.
2.1.2 Doublet-Lattice-Methode (DLM)
Die Doublet-Lattice-Methode (DLM) wurde 1969 von Albano und Rodden (Albano & Rodden 1969) be-
schrieben und stellt eine Erweiterung einer von S. G. Hedman (Hedman 1965) entwickelten Methode
für stationäre Strömungen dar. Die DLM wurde stetig erweitert und für die aerodynamische und aero-
elastische Analyse von Flugzeugen bei Unterschallgeschwindigkeiten genutzt.(Rodden et al. 1998)
Die Oberfläche wird dabei in kleine trapezförmige Felder unterteilt. Die 1/4-Linie jedes Felds wird mit
einer Verteilung von beschleunigten Potential-Doublets einheitlicher aber unbekannter Stärke besetzt.
(Albano & Rodden 1969)
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 42 Methoden und Anwendungsfälle
Abbildung 2.2: Unterteilung der Tragfläche durch trapezförmige Felder bei der „Doublet-Lattice-
Methode“ (Rodden et al. 1998).
Ebenso wie die VLM basiert die DLM auf den Gleichungen der Potentialtheorie , enthält aber zusätzlich
auch instationäre Terme. Das Diskretisierungsschema ist identisch. Anstelle der Geschwindigkeitspo-
tentialgleichungen, wie bei der VLM, löst die DLM die Beschleunigungspotentialgleichungen mit einem
harmonischen Ansatz. (Kier 2005) Bei stationärer Strömung ist jeder Doublet-Linienabschnitt äquiva-
lent zu einem Hufeisenwirbel, dessen „gebundene“ Wirbel mit der Doublet-Linie zusammenfällt und die
DLM reduziert sich zur VLM (Albano & Rodden 1969) (Kier 2005).
2.1.3 Vortex-Particle-Methode (VPM)
Die eben beschriebenen traditionellen singularitätsbasierten Methoden sind zwar rechnerisch effizi-
ent, können aufgrund der Annahme einer Potentialströmung nur die Effekte erster Ordnung erfas-
sen. Sie sind daher auf eine empirische Formulierung, zum Beispiel der Wirbelkerngröße, für die Lö-
sung des Rotornachlaufs angewiesen. Die VPM hingegen formuliert die Lösung über eine gitterfreie
Lagrange’sche-Formulierung, bei der keine künstliche numerische Dissipation beteiligt ist. Im Gegen-
satz zur CFD erfolgt somit keine Lösung der viskosen Wirbelgleichungen durch numerische Diskreti-
sierung über ein Rechengitter des Strömungsfeldes. (He & Zhao 2009)
Die viskose VPM verwendet die Lagrange’sche Beschreibung der Wirbelgeschwindigkeit und es ergibt
sich für die Gleichung der Wirbeldynamik: (He & Zhao 2009)
dω
= ω · ∇u + ν∇2 ω (2.2)
dt
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 52 Methoden und Anwendungsfälle
Wobei ω = ∇ × u dem Wirbelfeld, berechnet über das Geschwindigkeitsfeld u, entspricht.
Diese Lagrange’sche Beschreibung löst das Transportproblem der Wirbelschleppen. Die VPM erfordert
keine Gittergenerierung, was einen großen Vorteil darstellt, da die Gittergenerierung oftmals einen
großen zeitlichen Aufwand mit sich bringt. Darüber hinaus wird der Konvektionsterm in 2.2 nicht explizit
behandelt, was ein dissipationsfreies Schema für die VPM ermöglicht. (He & Zhao 2009)
In der viskosen VPM entstehen die Wirbel an physikalischen Körpergrenzen, wie z.B. dem Rotorblatt
oder anderen Oberflächen. Für die Simulation wird jede aerodynamische Oberfläche im Strömungsfeld
als Wirbelquellen behandelt, die die Wirbelpartikel für die Simulation des Wirbeltransports generieren.
(He & Zhao 2009)
Eine für die Analyse von Multirotor-Konfigurationen entwickele VPM ist in Abbildung 2.3 schematisch
dargestellt.
Abbildung 2.3: VPM zur Analyse von Multirotor-Konfigurationen (Alvarez & Ning 2019).
Über derartige VPM können die viskose Diffusion, die Vermischung und die Auflösung der Wirbel ab-
gebildet werden (Alvarez & Ning 2019).
2.1.4 Methoden-Überblick
Bei den beschrieben Methoden gilt es, vor allem die Nachteile der CFD im Bezug auf die aufwendige
Vorbereitung und die hohen Anforderungen an die Rechenleistung und -zeit zu überwinden. Nichtsde-
stotrotz soll ein gewisses Maß an Genauigkeit (Fidelity) erreicht werden.
Tabelle 2.1 gibt einen Überblick über die beschriebenen Methoden und nutzt die sehr hohe Genauigkeit
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 62 Methoden und Anwendungsfälle
und den sehr hohen Aufwand der CFD als Vergleich.
Tabelle 2.1: Vergleich der Methoden zur Modellierungen des Nachlauf
Gitter- instationäre
Methode Rechenaufwand Fidelity Vermischung
generierung Effekte
VLM 7 mittel gering/mittel 7 7
DLM 7 gering/mittel mittel 3 3
VPM 7 hoch hoch 3 3
CFD 3 sehr hoch sehr hoch 3 3
Aus der Tabelle geht hervor, welche Nachteile mit der Verwendung der einzelnen Methoden einherge-
hen. So kann mit der VLM durch den relativ einfachen Ansatz eine schnelle Simulation durchgeführt
werden, jedoch werden über die Potentialtheorie keine Reibungseffekte berücksichtigt. Mit der DLM,
welche ebenfalls auf dem Ansatz der Potentialtheorie basiert, lassen sich zwar auch keine Reibungs-
effekte erfassen, jedoch werden instationäre Terme beachtet. Sollen diese instationären Effekte, die im
Nachlauf auftreten, abgebildet werden, ist wiederum eine längerer Rechenzeit zu erwarten. Die VPM
erreicht zwar ein hohes Maß an Genauigkeit, kann in vielen Fällen aber durch hohen Rechenaufwand
ungeeignet für die Design-Phase einer Konfiguration sein. Sie bringt allerdings den großen Vorteil im
Vergleich zur CFD mit sich, dass keine Rechengitter für das Strömungsfeld generiert werden muss.
2.2 Caradonna-Tung Rotor
Der Caradonna-Tung Rotor wurde 1981 von Caradonna und Tung mit dem Ziel entworfen, die Entwick-
lung von verschiedenen Rotorleistung-Codes mit einem Benchmark-Test zu unterstützen. (Caradonna
& Tung 1981) Die Ergebnisse, die in der Arbeit von Caradonna und Tung veröffentlicht wurden, werden
bis heute als Vergleich genutzt und bieten eine Möglichkeit zur Validierung in der Rotoranalyse, vor
allem bei der CFD-Simulation.
2.2.1 Experimenteller Aufbau
Das Experiment von Caradonna und Tung wurde in einem Windkanal des NASA Ames Research Cen-
ters durchgeführt. (Caradonna & Tung 1981) Der experimentelle Aufbau wird in Abbildung 2.4 gezeigt.
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 72 Methoden und Anwendungsfälle Abbildung 2.4: Experimenteller Aufbau des Cardonna-Tung-Rotors (Caradonna & Tung 1981). Der Rotor besteht aus zwei rechteckigen Rotorblättern, welche ohne Schränkung und Zuspitzung mit einem NACA-0012 Profil ausgeführt sind. Mit einem Radius von R = 1.143 m und einer Profiltiefe von c = 0.1905 m ergibt sich ein Aspect-Ratio von AR = 6, welcher gewählt wurde, um einerseits möglichst große Reynolds-Zahlen zu erreichen und andererseits genügend Platz für Messinstrumente zur Ver- fügung zu haben. Über die Gestaltung der Nabe selbst werden keine Informationen geliefert, jedoch ist anzunehmen, dass der Radius der Nabe 10 % des Rotorradius entspricht. Der Steigungswinkel der Rotorblätter ist variabel zwischen 0 und 12° einstellbar. Die Drehzahl wurde im Bereich von 600 bis hin zu 2500 RPM variiert und somit die Mach-Zahl an der Rotor-Spitze festgelegt. (Caradonna & Tung 1981) Folgende Tabelle gibt einen Überblick über die Parameter der experimentellen Durchführung des Caradonna-Tung Rotors: Lehrstuhl für Luftfahrtsysteme | Technische Universität München 8
2 Methoden und Anwendungsfälle
Tabelle 2.2: Caradonna-Tung Rotor: Parameter der experimentellen Durchführung
Parameter Wert
Anzahl an Rotorblättern N 2
Rotorradius R 1.143 m
Nabenradius r 0.1143 m
Tragflächenprofil NACA-0012
Profiltiefe c 0.1905 m
Rotoranstellwinkel ΘC 0 − 12°
Rotordrehzahl ΩRotor 600 − 2500 RPM
An der Ober- und Unterseite der Rotorblätter wurden Drucksonden befestigt, die in weiterer Folge die
Bestimmung der Druckverteilung ermöglichten. Darüber hinaus wurden unter dem Rotor Heißdrahtson-
den montiert, durch welche die Wirbelstärke an der Blattspitze und die Bahnkurve bestimmt werden
konnte. Die Druckverteilung wurde an fünf radialen Abschnitten (r/R = 0.50, 0.68, 0.80, 0.89, 0.96) ge-
messen und daraus der Auftriebsbeiwert C L für diesen Abschnitt berechnet, welche zur Validierung
genutzt werden können. (Caradonna & Tung 1981)
2.2.2 Erkenntnisse und Anwendung
Da der Caradonna-Tung-Roter bei verschiedenen Kombinationen von Steigungswinkel und Drehzahl
betrieben wurde, liegen durch die Studie von Caradonna und Tung Ergebnisse für ein breites Spektrum
an Strömungszuständen vor.
Die Ergebnisse können bei der Rotoranalyse als Vergleichswerte genutzt werden und bietet so vor
allem der CFD-Community eine konkrete Datenbank für die Codevalidierung. (Ricci et al. 2020)
2.3 Airbus A3 Vahana
Vahana wurde vom Airbus Innovationszentrum Acubed (A3 ) entwickelt und ist ein voll-elektrisches,
autonom fliegendes VTOL-Flugzeug. Im Zeitraum von 2016 bis 2020 wurden mit zwei Demonstratoren
über 130 Flugtests absolviert und somit der Grundstein für weitere Urban-Air-Mobility-Projekte, wie dem
City Airbus, gelegt. (Acubed 16.12.2020) Eine Fotoaufnahme und eine schematische Darstellung des
Vahana werden in Abbildung 2.5 und 2.6 gezeigt.
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 92 Methoden und Anwendungsfälle
Abbildung 2.5: Vahana Demonstrator (Airbus Abbildung 2.6: Schematische Darstellung des
15.12.2020). Vahana (Acubed 16.12.2020).
2.3.1 Konzept und Aufgabenbereich
Das Projekt Vahana beabsichtigt die städtischen Luftwege durch die Entwicklung des ersten zertifi-
zierten elektrischen, selbst-gesteuerten vertikalen Start- und Landeflugzeugs (VTOL) zu öffnen. Dabei
sollte Vahana einen kostengünstigen Ersatz zu Nahverkehrsmittel wie dem Auto und dem Zug bieten.
(TransportUP 17.12.2020) Grundvoraussetzung für dieses Konzept war es, durch die vollständige Au-
tomatisierung und der Echtzeiterkennung von Hindernissen ein hohes Sicherheitsniveau zu erreichen.
Dadurch können menschliche Fehler minimiert und die Kapazität des Luftraums gesteigert werden.
(TransportUP 17.12.2020)
2.3.2 Technische Daten/Spezifikationen
Um die genannten Ziele zu erfüllen und den Aufgabenbereich abzudecken, wurde ein spezielles Design
gewählt, das in Abbildung 2.7 mit den wichtigsten Spezifikationen vorgestellt wird.
Abbildung 2.7: Technische Spezifikationen der Airbus Vahana (Airbus 15.12.2020).
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 102 Methoden und Anwendungsfälle
Wie in dieser von Airbus erstellten Grafik ersichtlich ist, ist Vahana mit 8 Propellern ausgestattet, die
jeweils mit 45 kW Elektromotoren angetrieben werden. Die Kippflügel-Konfiguration ermöglicht sowohl
einen vertikalen Start- und Landevorgang, aber auch einen Reiseflug wie mit einem konventionellen
Starrflügler. Mit der Batteriekapazität von 38 kWh kann mit einem Passagier oder einer Nutzlast von
90 kg eine Strecke von circa 50 km bei einer Reisegeschwindigkeit von 190 km/h zurückgelegt werden.
Sogenannte Smart-Sensoren ermöglichen die Erkennung von Hindernisse und sind somit die Grund-
lage für den autonomen Flug des eVTOLs. (Airbus 15.12.2020) In der nachfolgenden Tabelle werden
diese Spezifikationen und weiterer wichtige Kenngrößen zusammengefasst: (Airbus 15.12.2020)
Tabelle 2.3: Vahana: Spezifikationen (Airbus 15.12.2020)
Parameter Wert
Anzahl Sitze 1
Anzahl Propeller 8
Höhe 2.81 m
Spannweite 6.25 m
Leergewicht 475 kg
MTOW 815 kg
Nutzlast 90 kg
Reichweite 50 km
Reisegeschwindigkeit 190 km/h
Maximalgeschwindigkeit 220 km/h
Motorleistung 8 × 45 kW
Batterie-Kapazität 38 kWh
Details wie verwendete Flügelprofile oder verwendete Rotoren sind jedoch nicht öffentlich zugäng-
lich. Auch die Abmessungen der Winglets, Einstellwinkel des Haupt-und Canard-Flügel, verwendete
Drehzahlen und Rotoranstellwinkel sind nicht bekannt und müssen im Laufe dieser Arbeit abgeschätzt
werden.
Durch die genannten Spezifikationen konnten folgende Vorteile umgesetzt werden: (Airbus 15.12.2020)
• autonom: selbst gesteuert mit Smart-Sensoren
• leise: weniger Lärm als konventionelle Helikopter
• zeitsparend: bis zu 4 mal schneller als ein Auto
• emissionsfrei: voll-elektrisch und batteriebetrieben
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 112 Methoden und Anwendungsfälle
2.3.3 Erkenntnisse
Airbus stellte die Entwicklung des Vahana Ende 2019 zu Gunsten des CityAirbus ein und der Vahana-
Demonstrator absolvierte am 14. November 2020 seinen letzten Testflug . (Acubed 16.12.2020) Je-
doch konnte das Projekt Vahana stark zur Entwicklung der Urban-Air-Mobility-Initiative von Airbus bei-
tragen und wichtige Meilensteine zum Fortschritt der globalen Urban-Air-Mobility erreichen. (Acubed
16.12.2020)
In folgenden Disziplinen wurden die wichtigsten Erkenntnisse gewonnen:
• beim voll-elektrischen Flug: A3 hat ein voll-elektrisches Antriebssystem bestehend aus Bat-
terien, Motoren, Aktuatoren etc. für eine Kippflügel-Konfiguration konstruiert. Damit wurden 138
Flugtests über beachtliche Strecken von insgesamt über 500 nautischen Meilen absolviert. (Acu-
bed 16.12.2020)
• beim autonomen Fliegen: Risiken durch Hindernisse sowohl in der Luft als auch am Boden
konnten bzw. können durch die Echtzeiterkennung und dem Zusammenspiel von Flugsteue-
rungssoftware und Sensoren vermindert werden. Auch der Übergang zwischen vertikalen Flug
und Reiseflug erfolgte vollständig autonom. (Acubed 16.12.2020)
• beim wirtschaftlichen Aspekt der Urban-Air-Mobility: Vahana lieferte viele Aufschlüsse dar-
über, welche Leistung benötigt werden, um zukünftige Passagiere und Betreiber zufrieden zu-
stellen und mit welchen Betriebskosten zu rechnen ist. Somit sind die Erkenntnisse für die
Strategie von Airbus bezogen auf die Urban Mobility unerlässlich. (Acubed 16.12.2020) (Airbus
15.12.2020)
All diese Erkenntnisse werden auf die nächsten Generationen von Urban-Mobility-Konzepten von Air-
bus verwendet (Airbus 15.12.2020).
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 123 Rotoraerodynamik-Tools
3 Rotoraerodynamik-Tools
Im folgenden Abschnitt werden die Tools zur Rotoraerodynamik-Analyse vorgestellt, welche im weiteren
Verlauf dieser Arbeit verglichen werden. Es wird erläutert, auf welchen Grundlagen die einzelnen Tools
basieren, wie Modelle generiert werden und welche Ergebnisse erhalten werden können.
3.1 DUST
Das erste der vier betrachteten Tools ist DUST, eine neue medium-fidelity aerodynamische Open-
Source-Software. DUST ist das Ergebnis einer Zusammenarbeit zwischen dem Politecnico di Milano
und A3 von Airbus und wurde mit dem Ziel entwickelt, ein schnelles, flexibles und genaues Tool zu
schaffen. Es soll in der Lage sein aerodynamische Simulationen komplexer Flugzeugkonfigurationen
durchzuführen, indem es eine zuverlässige und robuste Darstellung von interaktiven aerodynamischen
Phänomenen abbildet. Eine umfassende aerodynamische Analyse für beliebige Fahrzeugkonfiguratio-
nen, einschließlich konventioneller Flugzeuge, Hubschrauber und neuer eVTOLs wird durch DUST für
beliebige Flugzustände ermöglicht. (Tugnoli et al. 2020)
3.1.1 Allgemeines
DUST beruht auf der Helmholtz-Zerlegung des Geschwindigkeitsfeldes, um das aerodynamische Pro-
blem als gemischte Grenzelement-Wirbelpartikel-Methode umzusetzen.(Montagnani et al. 2019) In
DUST können verschiedene Methoden (VLM, LL etc.) in einem einzigen Modell kombiniert werden, um
die relevanten physikalischen Phänomene bestmöglich zu erfassen. Ein beschleunigtes Wirbelpartikel-
Modell (VPM) des Nachlaufs ermöglicht eine stabile Lagrange’sche-Beschreibung der Fortpflanzung
der freien Wirbel. Die Druckfeldauswertung in einer rotationsbehafteten Strömung beruht auf einem
integralen Grenzschicht-Problem für das Bernoulli-Polynom aus der Navier-Stokes-Gleichung. (Monta-
gnani et al. 2019)
In Abbildung 3.1 wird eine typische mit DUST durchgeführte Analyse einer Kombination aus einem
Flügelabschnitt mit zwei Rotoren gezeigt.
Abbildung 3.1: DUST: Visualisierung einer Kombination aus einem Flügelabschnitt mit zwei Rotoren
(Syal et al. 2020).
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 133 Rotoraerodynamik-Tools Der Code von DUST wurde gegen numerische und experimentelle Daten von herkömmlichen Verkehrsflugzeug- und Hubschrauberkonfigurationen validiert. Darüber hinaus wurde DUST für kom- plexere Architekturen wie Kippflügel im Schwebe- und Vorwärtsflug validiert. (Montagnani et al. 2019) 3.1.2 Workflow DUST besteht aus drei ausführbaren Dateien, genannt „Executables“. Die erste davon führt das „Pre- Processing“, also die Vorbereitung der Geometrien, durch und die zweite, der „Solver“, führt die Simu- lation aus. Die dritte Datei ist für das sogenannte „Post-Processing“ zuständig und bearbeitet die aus der Simulation erhaltenen Daten so auf, dass aussagekräftige Ergebnisse erhalten werden können. (Montagnani et al. 2020) Der in DUST für die meisten Anwendungen verwendete Workflow ist in Abbildung 3.2 dargestellt. Abbildung 3.2: Beschreibung des allgemeinen Workflows von DUST (Montagnani et al. 2020). Die Geometrie des zu betrachtenden Körper muss dem Preprocessor in Form eines CGNS-Netzes oder einer parametrischen Vorschrift, siehe Abschnitt 3.1.3, zur Verfügung gestellt werden. Der DUST- Preprocessor sammelt dann die „Meshes“ aller Komponenten, verarbeitet sie und generiert bei Bedarf die Komponenten, die parametrisch erstellt werden sollen. Der Preprocessor übernimmt somit alle vorläufige Aufgaben, die zur Modellierung der Oberflächen erforderlich sind und erstellt anschließend eine binäre Geometrie-Datei. (Montagnani et al. 2020) Die Geometrie-Datei, sowie Parameter für die Simulation und der Referenzrahmen werden anschlie- ßend vom Solver benötigt. Der Solver führt die Simulation durch und erzeugt vollständigen Ergebnisse in Form von Binärdateien. Aus den Binärdateien ist es jedoch schwierig, komprimierte, aussagekräftige Ergebnisse zu erhalten. Aus diesem Grund ist es möglich, aus einer Vielzahl an Auswertungsmög- lichkeiten auszuwählen und diese vom Postprocessor durchführen zu lassen. Dadurch erhält man die gewünschten aussagekräftigen Ergebnisse. (Montagnani et al. 2020) Lehrstuhl für Luftfahrtsysteme | Technische Universität München 14
3 Rotoraerodynamik-Tools
Einzelne wichtige Schritte des Workflows werden in den nachfolgenden Punkten genauer erläutert.
3.1.3 Modell-Generierung
Ein in DUST verwendetes Modell kann aus mehreren Komponenten bestehen, dessen Geometrien als
CGNS-Datei, erstellt in CAD, importiert oder parametrisch erstellt werden. Jede Komponente ist einem
benutzerdefinierten Referenzrahmen zugeordnet. Die Referenzrahmen definieren die Platzierung der
Komponenten im Raum und ihre Bewegung sowohl im Raum als auch zueinander, wie im Falle der
Drehbewegung eines Rotors. (Montagnani et al. 2019)
Die parametrische Geometrieerzeugung wird in Abbildung 3.3 beispielhaft anhand eines Flügels ge-
zeigt.
Abbildung 3.3: DUST: Parametrische Erstellung einer Geometrie (Montagnani et al. 2020).
Wie zu erkennen ist, werden für jede Flügelhälfte 3 „Sections“ vom Benutzer vorgeben und der Zwi-
schenraum, genannt „Region“, wird automatisch erstellt.
Für die gewählte Geometrie kann anschließend, je nach gewünschter Genauigkeit für die spätere Aus-
wertung, ein Modell gewählt werden. (Montagnani et al. 2019) Dabei stehen folgende Modellierungen
der Komponenten zur Auswahl:
• „Surface panels“ (SP): modelliert einen Körper mit einer Dicke
• „Vortex lattices“ (VLM): modelliert eine flache Oberfläche
• „Lifting lines“ (LL): modelliert die auftriebserzeugende Fläche als Linie
Für die Modellierung des Nachlaufs stehen in DUST zwei Möglichkeiten zur Auswahl, nämlich ein so-
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 153 Rotoraerodynamik-Tools
genannter „Panel-Wake“ und ein „Particle-Wake“. Beide können sich frei oder mit einer starren vorge-
schriebenen Bewegung ausbreiten. Auch eine Kombination der beiden ist möglich, bei der der „Panel-
Wake“ nach einer gewählten Zeitspanne vom „Particle-Wake“ abgelöst wird. (Montagnani et al. 2019)
In Abbildung 3.1 ist bei genauerem Hinsehen an der Hinterkante des Rotors der hier leicht geboge-
ne Panel-Wake zu erkennen, welcher anschließend durch Nachlauf-Partikel abgelöst wird. Der Panel-
Wake dient dazu, dass die Kutta-Bedingung eingehalten wird, worauf in der Modellierung geachtet
werden sollte (Montagnani et al. 2020).
3.1.4 Solver
Der in DUST implementierte aerodynamische Solver beruht auf der Helmholtz-Zerlegung des Ge-
schwindigkeitsfeldes. Das aerodynamische Problem wird neu formuliert und eine Kombination von zwei
Teilproblemen betrachtet: eines für die rotationsfreie Geschwindigkeit und eines für den Rotationsbei-
trag. Der Solver benötigt kein Volumengitter, sondern nur das Oberflächennetz des Modells. Die po-
tentielle Geschwindigkeit genügt einer Randelementformulierung des aerodynamischen Problems. Die
Lösung dieses Problems beruht auf dem Prinzip der Überlagerung von elementaren Oberflächensingu-
laritäten , realisiert durch folgende aerodynamische Elemente: „Surface panels“ (SP), „Vortex lattices“
(VLM) und „Lifting lines“ (LL). Jeder Modellierungstyp führt eine andere Randbedingung in das Problem
ein und hat seine eigene Methode zur Kräfteberechnung. (Tugnoli et al. 2020)
An den Hinterkanten von Auftriebskörpern regelt die Kutta-Bedingung die Ausscheidung freier Wirbel
in den Nachlauf, die als eine Kombination aus einer strukturierten Menge von Wirbelringen und einer
Wolke von Wirbelpartikeln modelliert werden kann. Das Vorhandensein von Wirbelpartikel im Nachlauf
bringt den Rotationsbeitrag in das Geschwindigkeitsfeld ein, dessen Dynamik durch eine Lagrange’sche
Beschreibung des Wirbelfeldes bestimmt wird. Die Lösung wird dann über die betrachtete Zeitspanne
durch einen Timestepping Algorithmus entwickelt. (Tugnoli et al. 2020)
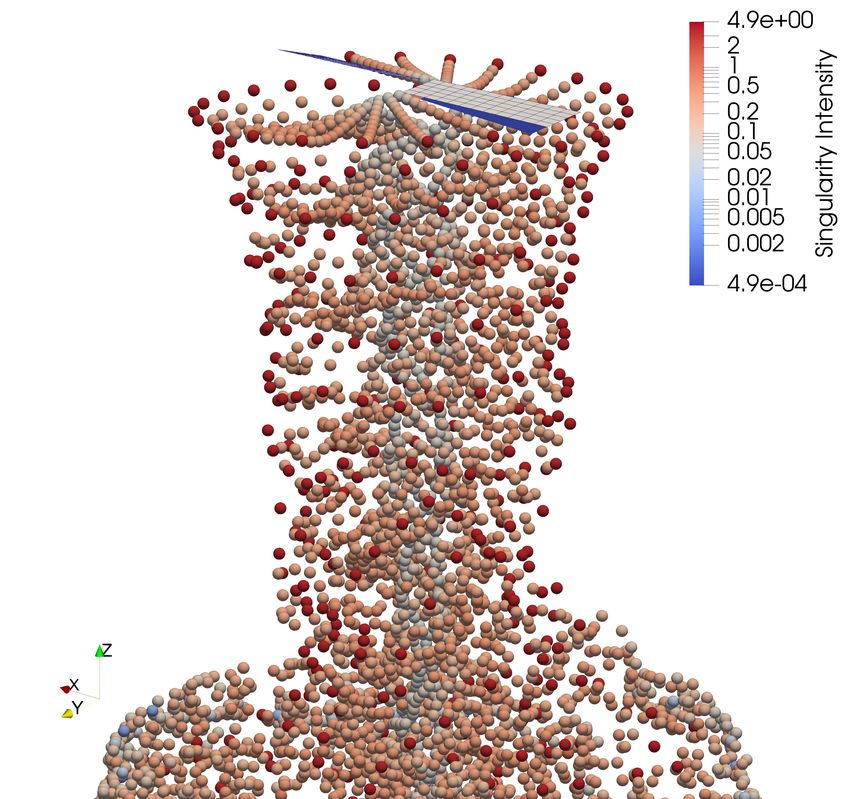
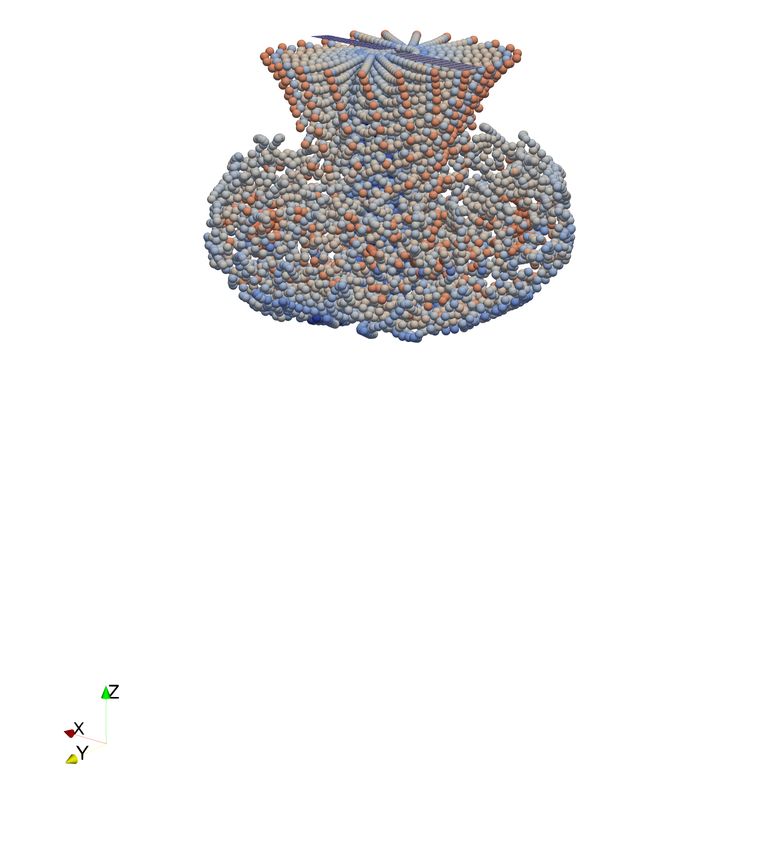
Die erzeugten Ergebnisse enthalten die vollständige Lösung, die während der Simulation erhalten wur-
de, in Bezug auf die Verteilung von Singularitäten auf Körperoberflächen und auf den Nachlauf. (Mon-
tagnani et al. 2020)
3.1.5 Datenausgabe und Visualisierung
Wie bereits erläutert, sind die vom Solver erstellten Daten noch unbrauchbar und müssen vom Post-
processor in aussagekräftige Daten umgewandelt werden.
Um die Solver-Daten brauchbar zu machen, stehen folgende Arten der Auswertung zur Verfügung:
(Montagnani et al. 2020)
• Integrale Kräfte: listet den Verlauf der Gesamtkräfte auf die Geometrie oder Teile davon auf
• Proben: listet den zeitlichen Verlauf von bestimmten Variablen an ausgewählten Punkten auf
• Kräfte entlang eines Abschnitts: listet die Kräfteverteilung entlang einer Richtung eines schlan-
ken Körpers auf (für Flügel, Rotorblätter etc.)
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 163 Rotoraerodynamik-Tools
• Visualisierung: Zeigt die Bewegung der Geometrie und des Nachlaufs und visualisiert die Inten-
sität von ausgewählten Variablen auf den Oberflächen und im Nachlauf
• Strömungsfeld: Visualisiert das Strömungsfeld in einer „box domain“
3.2 FLOWLab
FLOWLab ist ein Forschungslabor am Fachbereich für Maschinenbau der Brigham Young University
aus Utah. Die Abkürzung FLOW steht für Flight, Optimization und Wind, das Wort selbst steht für ae-
rodynamische Strömungen und somit werden die vier Schwerpunkte, die in der Forschung Anwendung
finden, verkörpert. Das Forschungslabor FLOW beschäftigt sich also mit der Aerodynamik und Optimie-
rung im Bereich des Flugzeugdesign und der Windenergiesysteme und entwickelt dafür verschiedene
aerodynamische Tools. (FLOW Lab - BYU 11.12.2020)
3.2.1 Allgemeines
Eines dieser aerodynamischen Tools nennt sich „FLOWUnsteady“. FLOWUnsteady ist ein Simulations-
Tool für die mixed-fidelity instationäre Aerodynamik und Aeroakustik. Das Tool vereint folgende
Aerodynamik-Tools für mittlere und hohe fidelity, die im FLOWLab von BYU entwickelt wurden: Geo-
metricTools („geometric engine“), FLOWVLM („VLM and strip theory solver“), CCBlade („blade element
momentum solver“), MyPanel („3D inviscid panel solver“) und FLOWVPM („Viscous vortex particle me-
thod“). (FLOWUnsteady 08.10.2020) FLOWUnsteady wurde vorallem mit dem Ziel entwickelt, eVTOL-
Konfigurationen während der Transitionsphase zu analysieren (Alvarez 2020).
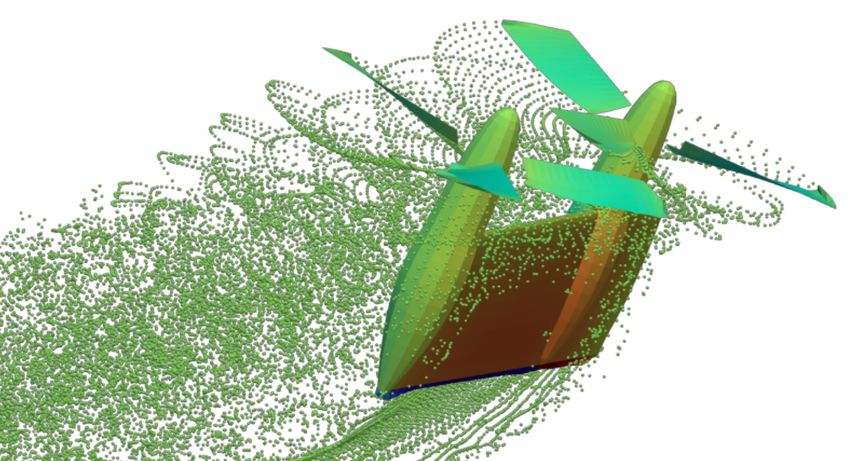
Ein typisches Beispiel dafür, was in FLOWLab simuliert und dargestellt werden kann, wird in Abbildung
3.4 gezeigt.
Abbildung 3.4: FLOWLab: Simulation eines Flügels mit zwei Rotoren im Reiseflug (Alvarez & Ning
2021).
Die Wirbelstärken sind in dieser Darstellung als Pfeile dargestellt und werden mit Isoflächen des Wir-
Lehrstuhl für Luftfahrtsysteme | Technische Universität München 17Sie können auch lesen

















































