Projekt: Lego Mindstorms - Freies Projekt Prüfer: Prof. Stefan Wölwer Wintersemester 2010 / 2011 Martin Neundorfer
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Projekt: Lego Mindstorms
Freies Projekt
Prüfer: Prof. Stefan Wölwer
Wintersemester 2010 / 2011
Martin Neundorfer
uni@der9.de
Martin Neundorfer | www.der9.de 1 / 16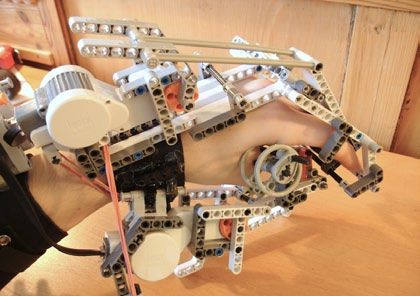
Willkommen in Babel
geht es. Damit soll Kindern und Jugendlichen einen
Einstieg in die Logik von Programmen und den
Zusammenhang zwischen Hard- und Software
erklärt werden.
Also für mich, der als Kind und auch noch als
Oder: “Lego Mindstorms NXT und Software!” Jugendlicher immer gerne mit Lego am schaffen
war, bis der Computer und die damit verbundenen
Vielleicht vorab, Lego Mindstorms ist genau Möglichkeiten die Bausteine ablösten, klang das nach
genommen ein “Lego Technik” Bausatz, der mit einer durchaus interessanten Kombination.
den gleichen Teilen (Zahnrädern, Lochstangen und
Verbinder-Pins) ausgestattet ist, wie fast alle modernen Um einen Einstieg in die Möglichkeiten zu finden,
Bausätze der Firma. Allerdings unterscheidet er sich bemühte ich das Internet und bin, nach einigen
in so fern vom normalen Lego, als dass er zusätzlich Mausklicks auf den außergewöhnlichsten Projekten
den so genannten programmierbaren Legostein – gelandet, die mit diesem Setting umgesetzt wurden.
in meiner Version (Ja, es gibt Verschiedene) NXT Ein paar Beispiele: Es gibt Nadeldrucker, Rubics-
genannt. Dazu bekommt man noch 3 Motoren 2 Cube Solver, 3D Scanner mit Plotter und was weiß
Berührungssensoren, einen Farb- und Lichtsensor, ich noch alles. Nur um in die Materie mal einzu-
sowie einen Ultraschall – Distanzmesser. Außerdem steigen habe ich mal eher bodenständig angefangen.
liefert Lego eine Software mit, bei der man durch Ich wollte mich mit Wegfindung auseinandersetzen.
eine Drag and Drop Oberfläche verschiedene “Pro- Was meiner Meinung nach, zum Testen erst einmal
grammschnippsel” zusammenziehen kann um seinem naheliegend war.
Roboter Leben einzuhauchen. Denn genau darum
Martin Neundorfer | www.der9.de 2 / 16
Willkommen in Babel
Ein Gefährt war schnell entworfen und so ging rücken zu können. Allerdings stößt man, wenn man
es erst einmal fröhlich ans Programmieren. Was sich etwas genauer mit der Materie beschäftigt auf
im Falle der mitgelieferten Software (gleichnamig ein wahrhaftes “babylonisches Sprachwirrwar”. Es
NXT genannt) wie gesagt eher ein Zusammenziehen gibt, soweit ich das ersehen konnte ungefähr 20
einzelner “Blöcke” ist, mit der man einfache Pro- unterschiedliche Programmiersprachen, mit denen
gramme wirklich schnell fertigen kann. Problema- man auf dem Stein schreiben kann.
tisch wird diese grafische Oberfläche allerdings, wenn
das was man im Kopf hat über einzelne Abfragen Auf den ersten Blick mag das zwar ziemlich anspre-
hinaus geht. Dann wird es nämlich ziemlich schnell chend erscheinen, denn, denkt man, sucht man sich
unübersichtlich. die, welche einem am besten liegt heraus und arbeitet
damit. Tja, schön wäre es gewesen. Ja, man hat 20
unterschiedliche Sprachen, aber keine kann wirk-
lich alles und es gibt immer Probleme mit der Por-
tierung auf den NXT. Zudem kommt dazu, dass
der Hype um den Mindstormsbausatz irgendwann
im Jahr 2007 war und man auch nur Foren aus der
Zeit von 2005 – 2008 findet. Die Frustration war
ziemlich groß. Aber trotzdem habe ich einige Pro-
gramme getestet und damit Erfahrungen gesammelt.
Es kommt zu Überschneidungen einzelner Ele-
mente und wird zuerst einfach nur unübersicht- Meine erste Alternative zu der original Soft-
lich. Wenn es dann noch komplizierter wird (Was ware war “Robolab”, was scheinbar der Vorgänger
heißt, mehrere If-Abfragen ineinander verschachtelt), der “NXT-Software” war und in der Weiterent-
beginnt dann das Programm nicht nur unübersicht- wicklung jetzt für Schulen als Lehrmittel angeboten
lich zu werden. Es überschwemmt einen förmlich wird. Es hat genau wie NXT eine grafische Ober-
mit Fehlermeldungen und stürzt in regelmäßigen fläche mit der man einzelne Blöcke zu Programmen
Abständen ab. zusammen zieht.
Das Ganze wirkt etwas wie aus den frühen 90ern
und ist auch im Bezug auf Benutzerfreundlichkeit
ungefähr in dieser Epoche einzustufen. Um damit
Arbeiten zu können darf man erst die Firmware des
NXT aufbrechen und selbst dann funktionieren viele
Sensoren des NXT nicht wirklich damit. Da das
Programm für die Vorgängerversion des NXT also
den NXC entwickelt und dann nur im Nachhinein
aufgestockt wurde. Nun ja, es gab Fehler, Fehler und
Daraufhin habe ich mich dann in diversen Foren Fehler. Nur als Beispiel: Man konnte einen Motor
auf die Suche nach Alternativprogrammen gemacht starten ihn aber nicht mehr anhalten lassen.
um der “Kutsche” mit einem Programm zu Leibe
Martin Neundorfer | www.der9.de 3 / 16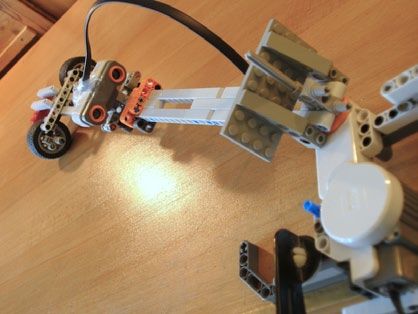
Willkommen in Babel
Dazu kommt, dass ich persönlich meinen Quell-
text beim Programmieren sehen und selbst darin
hantieren möchte, anstatt mir in einer grafischen
Oberfläche den Wolf zu klicken. Deshalb gibt es
einige Programme oder Programmerweiterungen
mit denen man die Sensoren und Motoren des NXT
ansteuern und auslesen kann. Ruby NXT, Not exactly
Java und wie sie alle heißen.
Nach weiterer Suche bin ich dann auf den ver-
meintlichen Erlöser gestoßen. Bricxcc basiert auf
der Programmiersprache C++ und ist kein grafi-
sches Programm mehr sondern handfestes Program-
mieren. Funktioniert ziemlich gut mit der original
Firmware und hat – bisher keine Fehler.
Weitere Informationen
■■ http://wasmacht.der9.de/?p=77
•
Martin Neundorfer | www.der9.de 4 / 16
Go NXT, GO!
Nach einigen Versuchen schlug sich die erste Ver-
sion ziemlich gut und konnte mit einem Vergleichs-
mechanismus auch erkennen ob das Hindernis “über-
fahren” werden kann oder ob es sich doch lieber
einen Weg drumherum suchen sollte. Das erschien
mir logisch, denn der Ultraschallsensor erkennt auch
ein Kabel als „Hinternis“.
Version 2
Allerdings gab es auch Situationen in denen der
Nach meiner Reise durch alle möglichen Pro- erste Prototyp nicht wirklich weiter kam. Nämlich
gramme (ich hätte nie gedacht, dass es für ein Lego dann, wenn es sich zwischen zwei Gegenständen
– Spielzeug so viele unterschiedliche Software gibt) verklemmt hatte. Da hinten kein Entfernungsmesser
soll sich dieses Kapitel mit einigen meiner ersten angebracht war (Es war ja auch nur einer im Set)
„gebauten Modelle“ befassen. (Allerdings muss ich Hatte ich mir dann einen Mechanismus überlegt mit
gestehen dass ich mir ein paar Teile von meinem dem sich der Kollege umschauen konnte.
Patenkind geborgt habe, als ich das letzte mal Zuhause
war, somit sind nicht alle Teile im Bausatz.)…
Version 1
Das bereits im letzten Artikel gezeigte und
erwähnte Modell, dass sich (jetzt mit der entspre-
chenden Software) seinen eigenen Weg durch die
Welt suchen kann.
Martin Neundorfer | www.der9.de 5 / 16
Go NXT, GO!
(Der Arm der hier so schief nach rechts hängt war Es hätte wohl noch einiges an Feintuning gebraucht
im Modell noch oben am Kopf befestigt) Das System um dem Modell eine etwas, graziler Anmutung zu
mit dem drehbaren Kopf funktionierte ziemlich gut geben. Allerdings war ich irgendwie entmutigt als
und man konnte die Wegfindung gut umsetzen. mein werter Herr Professor losprustete als er mein
“Werk” zum ersten mal gesehen hatte.
Dann bin ich aber zufällig auf ein Video auf You-
tube gestoßen. (Link unter „weitere Informationen“) Weitere Informationen:
■■ Youtube Link:
http://www.youtube.com/watch?v=b694exl_
oZo
■■ Blogeintrag mit Videos:
http://wasmacht.der9.de/2011/03/05/go-nxt-
go/
•
Ich kannte die “Strandbiester” von Theo Jansen
zwar schon, wollte das allerdings trotzdem irgendwie
adaptieren und hatte dann in einer Nacht und Nebel
Aktion alles was ich bisher zusammengebaut hatte
wieder auseinander genommen und an “Laufmecha-
nismen” gebastelt. Die, zwar nicht von Windkraft
sondern den NXT Motoren angetrieben werden,
aber trotzdem, das Prinzip funktionierte.
Der Läufer
Der erste Prototyp war, wenn man ehrlich ist,
nicht ganz so erfolgreich. Es lief zwar nach vorne
und nach hinten aber war auch nur ohne den „den-
kenden Baustein“ (der immerhin knapp 400 Gramm
wiegt) in der Lage zu laufen.
Martin Neundorfer | www.der9.de 6 / 16
Farbe bekennen
Ich fand das Konzept und die Idee mit einem
Farbsensor die Farbe zu scannen und dann mit einem
Stift die gescannte Farbe direkt benutzen zu können
irgendwie spannend. Und da ich im Bausatz ja sowohl
einen Farbsensor, als auch 3 Motoren hatte, dachte
Und diesen Titel kann man durchaus in zweierlei ich mir etwas aus um das Konzept das, wie deut-
Hinsicht sehen. Denn ungefähr ein halbes Jahr nach lich wurde nicht umgesetzt worden war, zu bauen.
den fahrenden und laufenden Entwürfen wurde mir
dann doch bewusst, dass das Projekt Lego durchaus Der Farbsensor von Lego ist offiziell ein “RGB”
bald einmal ein Ende haben sollte. Da mir allerdings Sensor. Heißt er scannt eine Farbe und gibt die Werte
immer noch keine, berauschende, weltverbessernde von Rot, Grün und Blau aus. Lichtfarben die sich
oder spannende Idee beschieden war, war die sich aus dem Spektrum ableiten und zusammen ein Weiß
einstellende Frustration groß. ergeben. Das Problem ist nur, man kann nicht mit
RGB Werten zeichnen. Denn wenn man normale
Und wieder einmal per “Zufall” fand ich im Farben miteinander mischt entsteht Weiß, sondern
Internet eine Idee, einer Produktdesignerin. Als Mischfarben. Aus dem Kunstunterricht in der Schule
Anmerkung: Langsam könnte man meinen dass ist das sicherlich bekannt. Also war der erste Schritt
mich “Zufälle” häufig begleiten oder dass es so etwas für mich, heraus zu finden, wie man die Rot, Grün
wie “Zufall” überhaupt nicht gibt. Aber das nur am und Blau Farbwerte in Rot, Blau und Gelb umwan-
Rande. Auf jeden Fall fand ich dann diesen Stift im deln / umrechnen kann. Nach einigen Anläufen und
Netz (Die Links zur Ursprungsseite habe ich leider unterschiedlichen Ergebnissen ( von ganz falsch bis
nicht mehr, aber es sei für aller Augen angemerkt: fast richtig) war also der erste Schritt getan.
‘Diese beiden Bilder sind nicht von mir’):
Martin Neundorfer | www.der9.de 7 / 16
Farbe bekennen
Der theoretische Unterbau des Projektes war also
gelegt, jetzt war die Frage wie die Umsetzung des
Konzeptes aussehen sollte. Es stand fest. Ich brauchte
mindestens 3 Farben, und ein Zeichenmedium, da
ich mit hoher Wahrscheinlichkeit nicht alle Bauteile
in einen Stift pressen konnte.
Was das Thema der Farben anging, hatte ich sofort
eine Idee, wie man sie lagern und bei Bedarf aus-
geben konnte. Dazu baute ich aus Lego und einer
handelsüblichen Spritze ein Modul, dass mittels eines
NXT Motors, eines Getriebes und einem Schieber
einen Mechanismus der die Spritze sehr langsam aus-
drücken konnte. Um das Modul zu planen und zu
testen baute ich zuerst die Mechanik für eine Farbe.
Dabei zeigte sich auch schnell ein Nachteil. Selbst
wenn man den noch so komprimiert plante, gäbe es
wohl kaum eine “Handtaschentaugliche” Lösung.
So, nachdem ich nun ein Modul für die Bereit-
stellung der Farben hatte, wären die anderen Beiden
einfach “Klone” des ersten Modells geworden, somit
beschäftigte ich mich jetzt mit dem eigentlichen Zei-
chenmedium. Einem Stift der über einen Infusions-
schlauch mit der Spritze verbunden wurde. Das war
nur eine vorübergehende Lösung, später sollten ja
3 Farben in dem Stift zusammen laufen, die je nach
Wunsch mit unterschiedlichsten Mischungsverhält-
nissen ausgegeben wurden.
Der Plan war einen Kugelschreiber so um zu bauen,
dass er immer noch die Vorteile des Rollballes bietet
aber auch Daten an darüber ob der Stift gerade auf-
liegt oder nicht an den NXT weitergeben konnte.
Ein erstes positives Ergebnis war und ist noch immer
das Fehlen von 14 hässlichen Kugelschreibern aus
meiner Stiftebox, die Frankenstein – gleich als Opfer
der Wissenschaft hingerichtet wurden. Das Ergebnis
sah dann wie folgt aus:
Martin Neundorfer | www.der9.de 8 / 16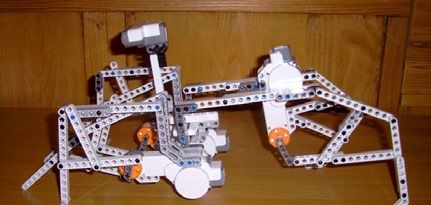
Farbe bekennen
Zuerst sah mein Plan vor, die Miene direkt an
den Drucksensor zu koppeln. Das stellte sich dann
allerdings beim zusammen bauen als unpraktikabel
heraus. Deshalb bekam der Stift in dieser Version
die schwarze Stange, die als Verlängerung dient und
Druck auf den Sensor ausübt, wenn der Stift eine
Oberfläche berührt.
Die Probleme
Bis hier verlief alles nach Plan. Sieht man mal
von der etwas über das Ziel hinaus geschossenen
Größe der “Anlage” ab. Ab diesem Punkt schien es
allerdings so als wolle alles immer weiter ins Chaos
versinken. Ich arbeitete zu diesem Zeitpunkt noch
immer mit Bricxcc (Einem Programm mit dem man
Programme auf Basis der Programmiersprache C++
auf dem NXT schreiben kann) und war auch soweit
mit den Ergebnissen zu Frieden.
Allerdings hätte ich vorher den Farbsensor testen
sollen, wie ich jetzt weiß. Denn es stellte sich, als ich
dabei war die Software für den Stift zu schreiben,
heraus wie eingeschränkt die Lego Hardware arbeitet.
Der so genannte RGB Sensor lieferte nämlich alles
andere als RGB Werte zurück. Ja er konnte Farben
erkennen, zugegeben. Aber nur Rot, Grün, Blau,
Gelb, Schwarz, Orange, Grau und Weiß. Danach
hörte sein Ermessensspektrum auf. Auf dringlicheres
Nachfragen meinerseits (anhand der Raw-Werte-
Abfrage) begann der Sensor lediglich wirre Zah-
lenketten auszuspunken, die sich irgendwie nicht
in einen Zusammenhang mit den Farben bringen
ließen. Ich hatte einen ganzen Nachmittag vergeb-
lich versucht die Werte logisch Farben zuzuordnen
– ohne Erfolg.
Ein ironisches Schnauben entlockte mir dann
meine Recherche im Netz als ich auf den Passus: “Der
Lego Sensor ist scheiße, kauf dir diesen speziellen
Martin Neundorfer | www.der9.de 9 / 16
Farbe bekennen
Farbsensor der Firma XYZ” stieß. Konnte ich dem
doch nur zustimmen. Der Farbsensor der Firma XYZ
kostete allerdings auch mal geschmeidige 70 Euro,
was mir dafür wirklich zu viel Geld war.
Darauf hin beschloss ich erst einmal weiter zu
machen als wäre nichts gewesen und wollte das System
einfach testen ob es überhaupt machbar war. Schließ-
lich ist Orange auch die Mischung aus Gelb und
Rot. So hätte ich mir auch keine Gedanken über
das Feintuning machen müssen.
Musste ich auch nicht, allerdings hätte ich mir
vorher überlegen sollen, welche Konsistenz die Farben
in den Spritzen haben sollten. Sobald man die Spritze
mit Farbe füllte und zu Schreiben begann, stellte sich
nämlich eine gesteigerte Inkontinenz auf Seiten des
Kugelschreibers heraus. Durch den Druck den die
Farbe innerhalb des Kopfes ausübte tropfte die Spitze
ab und an und ließ sich dann kaum dazu überreden
aufzuhören.
Als dann die Spitze des Kugelschreibers aus der
Miene schoss und eine Spur der Verwüstung vom
Schreibtisch, über den Boden auf das Bett und an
die Wand dahinter legte, war die Motivation für
dieses Projekt auf den absoluten Nullpunkt gesunken.
Zum Glück kam mir dann endlich eine Idee, was
ich gerne mit diesem Bausatz umsetzen würde und
auch könnte. Deshalb legte ich das Projekt “Farbscan-
Stift” zur Seite und entschied mich dazu meine eigene
Vision umzusetzen.
Weitere Informationen:
■■ Blog Eintrag mit Videos:
http://wasmacht.der9.de/2011/03/06/farbe-
bekennen/
Martin Neundorfer | www.der9.de 10 / 16Richtig zupacken
Natürlich kann man damit dem digitalen Gegen-
über mit schwingenden Fäusten einheizen. Eine
Rückmeldung vom Spiel an den Arm, dass das Ziel
nun getroffen wurde, oder ob der Fisch jetzt wirk-
lich an der Angel angebissen hat und wie viel Zug
man nun auf bringen muss um ihn aus dem Wasser
zu ziehen gibt es dadurch allerdings nicht. Man mag
natürlich zu recht fragen, wie man das auch bewerk-
stelligen will, worauf ich nur antworten kann, dass es
sich ohne einen größeren technischen Aufwand kaum
umsetzen lassen wird. Aber dass so etwas durchaus
machbar ist, wollte ich mit meinem abschließenden
Projekt im Lego-Sektor zeigen.
Was denn nun ?
Und jetzt geht es auf in die letzte Runde! Nachdem
ich nun schon einige verschiedene Modelle gebaut Wie oben schon angerissen, wollte ich eine Mög-
hatte, die mich alle nicht wirklich zufrieden gestellt lichkeit entwickeln über ein Eingabemedium sowohl
hatten, kam mir dann eine Idee für eine praktikable mit dem Computer zu kommunizieren, als auch
Lösung die ich auch persönlich ziemlich spannend eine Rückmeldung zu bekommen. Heißt, wenn ich
fand. ein Objekt mit der Hand umschließe, soll ich doch
bitte daran gehindert werden die Hand komplett zu
Wenn man sich momentan die Landschaft der schließen. Und wenn ich meine Hand bewege, so
“Neuen Eingabemedien” für Computer oder Kon- lange ich sie geschlossen habe, möchte ich außerdem,
solen anschaut kommt man an Schlagwörtern wie dass ich das digitale Objekt, an eine andere Stelle
“Wiimote”, “Balance Board” oder “Kinect” bei der verschieben kann. Ferner hätte ich auch gerne, dass
Xbox 360 nicht vorbei. Gerade beim Letzteren sehe ich im Anschluss meine Hand wieder öffnen kann,
ich persönlich allerdings eine Schwachstelle. Man wodurch das Objekt jetzt an seiner neuen Position
kann damit zwar Bälle treten, Tennis spielen, Skate- verharrt. Das war die Aufgabenstellung.
board fahren oder sich hinters Steuer eines Renn-
boliden schwingen und steuert dabei das Spiel mit Um noch einmal kurz in Erinnerung zu rufen,
seinen Gesten, aber ein Feedback dessen was man was in dem Lego-Bausatz alles dabei war: 3 Motoren,
da tut bekommt man nicht wirklich. 2 Tastsensoren, 1 Entfernungs- sowie 1 Farbsensor.
Martin Neundorfer | www.der9.de 11 / 16Richtig zupacken
Damit ließ sich sicherlich einiges anstellen. Im Kopf Fehlermeldungen sobald ich eine Libaryfunktion
hatte ich zu diesem Zeitpunkt schon einen Plan wie ausführen wollte.
das Resultat ungefähr aussehen sollte, blieb aller-
dings noch eine Frage, die geklärt werden musste. Einige Recherche brachte mich dann zu ein
paar Seiten:
Wie bekomme ich die Daten von dem Lego-
Stein in den Computer. Schließlich sollte es ja ein ■■ Die Seite mit den Beispieldaten des Autors
Eingabemedium werden und kein “Roboter” wie es ■■ Virtual Blocks – Eine Arbeit die auch mit der
eigentlich im Sinne von Lego wäre. Normalerweise Bibliothek erstellt wurde
schreibt man für den NXT ein Programm, läd es auf ■■ Einem Processing Script dass die Sensorwerte
den Stein herunter und startet es dort schließlich, graphisch ausgibt.
wodurch bestimmte Aktionen ausgeführt werden. ■■ Und einer Dokumentation als PDF wie man
Die Kommunikation mit meinem Mac Pro gestaltete den NXT richtig anschließt
sich dann etwas schwieriger als erwartet.
Aber das brachte mich alles nicht weiter, da ich
Dass der NXT über Bluetooth verfügt war zwar sowohl den NXT über die Netzwerkeinstellungen
bekannt und dass es Programme gab die vom Rechner als Seriellen Port verbunden als auch die neuste Ver-
aus, mit dem Stein kommunizieren konnte, hatte ich sion von RXTX installiert hatte. Es funktionierte
auch schon heraus gefunden, aber wie man sich selbst einfach nicht.
so ein Programm schreibt war mir noch nicht klar.
Mittlerweile war ein ganzer Tag der Fehlschläge
Zuerst bin ich bei meiner Recherche auf einige ins Land gegangen und die Motivation war erneut auf
Bluetooth Bibliotheken für Processing, Ruby und dem Tiefpunkt, als mir der entscheidende Gedanke
Java gestoßen mit denen ich auch eine Verbindung kam. Was wäre wenn die Bibliothek nicht die aktu-
zum NXT auf bauen konnte. Dann allerdings ging ellste Bibliothek von RXTX bräuchte, sondern die
es nicht mehr weiter. Denn ich konnte den Stein Version die 2007 aktuell war, als die Bibliothek ver-
einfach nicht als Client etablieren, wie es in einem öffentlicht wurde.
Tutorial als “ganz einfach” beschrieben war.
Success!
Somit habe ich weiter gesucht und bin dann zu
meiner Überraschung auf NXTcomm eine Processing Wer hätte das gedacht. Ich bin im Netz nach
Libary gestoßen die eine Bluetoothverbindung zum einigem Suchen auf ein Paket aus einer alten Ver-
NXT auf baut und die Grundfunktionen mitbringt sion von RXTXcomm gestoßen, die zusammen mit
um Motoren und Sensoren steuern zu können. Nach einem Shell Script für das richtig stellen der Rechte
den ersten gescheiterten Versuchen war ich ausge- angeboten wurde und aus dem Jahr 2007 war. Die
sprochen erfreut darüber dass die Lösung wohl “so Dateien habe ich in die entsprechenden Ordner von
einfach war”. Um es mit den Worten meiner Groß- OSX gezogen, via Terminal das Script ausgeführt
mutter auszudrücken: “Ja Pfeierdeckel” – Nichts und es läuft. Jetzt kann ich über Processing die Lego-
war mit einfach. Statt eine Verbindung mit dem Sensoren und Motoren anzapfen und von dort aus
Stein aufzubauen überhäufte mich Processing mit auch beeinflussen.
Martin Neundorfer | www.der9.de 12 / 16Richtig zupacken
Ich finde leider den Link zu der Seite nicht mehr einen Baustein nur 3 der Motoren anschließen kann,
auf der ich die Dateien gefunden habe. Deshalb stelle einmal ganz abgesehen.
ich die Dateien mit dem ausdrücklichen Hinweis,
dass ich sie selbst nur im Netz gefunden habe und Vielleicht sei noch erwähnt, dass es sich hierbei
sie nicht von mir geschrieben sind online. Für ent- ausdrücklich um ein Lego-Projekt handelt. Deshalb
stehende Fehler übernehme ich keine Haftung oder ist das Modell auch etwas “klobiger” ausgefallen, als
Garantie ;) Download es vielleicht mit entsprechend anderer Hardware aus-
fallen würde. Technisch gibt es heute bereits Mög-
Beim ausprobieren, stellte sich allerdings heraus, lichkeiten so etwas in einen etwas dickeren Hand-
dass der Farb und Licht Sensor mit dieser Biblio- schuh zu packen. Aber es ging nur darum einen
thek nicht funktioniert und immer nur den Wert möglichen Ansatz zu zeigen, der funktionsfähig ist.
1 zurückliefert. Ein kleiner Wehrmutstropfen aber
einer den man verkraften kann.
Jetzt, da die Hürde genommen war und ich die
Daten der Sensoren am Rechner verarbeiten konnte,
bemühte ich mich zuerst einmal die “Hardware”
zusammen zu bauen.
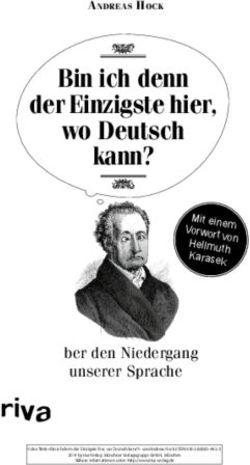
Die mechanische Hand
Nachdem die Idee eine Schnittstelle zwischen
Rechner und Mensch zu entwickeln gefunden und
die technische Umsetzbarkeit nun bewiesen war, sollte Das erste Thema dass bald auftauchte war, wie
der nächste Schritt die Hardware sein. Die durch die man die Konstruktion so umsetzen kann, dass sie
Lego-Teile erst einmal nur auf das Nötigste reduziert während der Benutzung nicht schmerzhaft ist und
sein sollte. So musste ich mir erst einmal darüber klar dennoch möglichst eng am Finger anliegt. (Wer jetzt
werden, was ich denn eigentlich brauchte um Posi- grinst, hat keine Ahnung wie scharf kantig Lego-
tion der Hand, Position der Finger und so weiter zu steine sein können :P )
ermitteln und dann an den Rechner zu übertragen.
Deshalb beschäftigte mich zuerst einmal mit einer
Art mechanischen Hand, die über zwei der drei Lego
Motoren (Jeder Motor hat einen digitalen Umdre-
hungssensor) erkennen konnte wie weit die Finger
gerade geschlossen sind. Dies funktioniert bei dem
Modell nur für den Daumen und für die 4 anderen
Finger als Einheit. Jeder der Lego Motoren wiegt
knapp 60 Gramm, was bei Zweien nach einer Weile
bereits etwas beschwerlich wird. Davon dass man an
Martin Neundorfer | www.der9.de 13 / 16Richtig zupacken
Das zweite Thema war, wie man den Sensor für
den Daumen so mit dem restlichen Teil verbindet,
dass er frei beweglich bleibt ohne ihn zu locker sitzen
zu lassen. Um das zu bewerkstelligen habe ich mir
mit zwei Gummis und einer Neopren Manschette
eine Halterung gebaut, die die gewünschten Frei-
heiten erlaubt und trotzdem Festigkeit bietet.
Et voilà damit war zumindest eine grundlegende
Steuerung der Motoren möglich und über den Hebel-
mechanismus am Motor kann ich, wenn gewünscht Der verbleibende Motor stellt den Mittelpunkt eines
so gegensteuern, das die Finger nur bis zu einem fiktiven Kreises dar. Ein daran angebauter Arm zeigt,
bestimmten Grad geschlossen werden können. Das vom Grad 0 aus gesehen den Winkel an und der Ult-
ganze noch einmal als Bewegtbild gibt es auch. Dabei raschallsensor, der auf einem Schlitten am Arm befes-
auch wie man das Teil anlegt. tigt ist, misst ständig die Seite C eines Dreiecks. Mit
dem 90° Winkel sind drei Angaben eines Dreiecks
M echanischer A rm beisammen. Mehr braucht es nicht um alle Winkel
und mit Cosinus und Tangens auch die fehlenden
Nachdem ein weiterer Schritt getan war und man Seiten zu berechnen. Wodurch sich die Werte X und
nun zum Einen erkennen konnte wie weit die Finger Y in einem Koordinaten System ergeben.
geschlossen waren aber sie zum Anderen daran hin-
dern konnte sich weiter zu schließen als gewünscht,
fehlte der Hardware nur ein letztes Teil. Da ich nicht
über eine Wiimote oder Ähnliches verfüge um die
Position der Hand genau auszulesen, war Erfinder-
geist gefragt. Ich hatte schließlich noch einen Motor,
Entfernungsmesser und die Tastsensoren. Weil ich mit
der Processing Libary den Farbsensor nicht anspre-
chen konnte, fiel er von vorn herein weg.
Freilich gibt es mehrere Möglichkeiten mit denen
man die Position zu bestimmen. Ich entschied mich
für eine Methode die am zuverlässigsten erschien.
Die Hand wird, zugegeben etwas eingeschränkt. Um eine möglichst hohe Ausbeute an Bewegungs-
Aber mit den gegebenen Mitteln war es das Beste freiheit zu bekommen, habe ich den Arm auf 180
was mir einfiel. Grad Nutzbarkeit angelegt. Dabei war zu beachten,
dass es eine Ausnahmesituation gibt, wenn der der
Das dabei verwendete System ist denkbar einfach Winkelwert des Motors genau 90 Grad beträgt, denn
und stützt sich bei der Berechnung der Koordinaten dann kann kein Dreieck mehr entstehen. Wenn man
auf die Berechnung eines rechtwinkligen Dreiecks. in diesem Fall allerdings die Hälfte des Kreisradius
Martin Neundorfer | www.der9.de 14 / 16Richtig zupacken
als X und den Abstand des Entfernungsmessers als Was ich zusätzlich mit eingebaut habe ist eine
Y Werte setzt, entsteht daraus auch kein Problem. Funktion die, zumindest bei Mac OSX zuverlässig
das Serial-Port erkennt mit dem der NXT mit dem
Bei der Konstruktion des Arms war im Endeffekt System verbunden ist.
nur darauf zu achten eine möglichst stabile Konstruk-
tion zu finden, da die erste Version fast sofort entzwei Da das ganz Script mit einem “FatalError” abstürzt
brach. Damit der Arm nicht so leicht die Bodenhaf- wenn die Verbindung zum NXT nicht erfolgreich
tung verliert ist am Ende ein Bleigewicht befestigt. hergestellt wird, wird der Verbindungsvorgang auch
nicht sofort beim Programmstart eingeleitet. Mit
In einem kurzen Video in meinem Blog-Artikel einem Druck auf die Taste “C” auf der Tastatur,
wird außerdem deutlich, dass der Arm der Hand wird der Benutzer gefragt, ob er wirklich eine Ver-
folgt auch wenn man nicht gezielt darauf achtet. bindung herstellen möchte und erst nach Bestätigung
wird der NXT kontaktiert.
Das digitale Gehirn
Nachdem sowohl die Theorie, als auch einige
“Hardware-Teile” ausführlich erklärt habe, soll es
sich hier hauptsächlich um die Software gehen, die
die Daten vom NXT über Bluetooth empfängt, aus-
wertet und ausgiybt.
Dabei fällt mir die Situation ein, als ich neulich
die Arbeit vor meinem betreuenden Professor prä-
sentiert habe und dieser fast vor Lachen aus dem
Stuhl gekippt ist. Für potenzielle Verletzungen oder
Schäden an Rechner oder Körper übernehme ich
somit keine Haftung ;)
Aber zurück zum eigentlichen Thema. Das Pro-
cessing – Programm dass ich geschrieben habe ist
eine sehr rudimentäre Software die dem Benutzer:
■■ die prozentuale Anzeige der Sensorwerte der
“Hand”,
■■ eine digitale Anzeige des Positionsmessers, Was leider einen Strich durch eine “Schnelle
■■ die Position im gedachten Koordinatensystem, Bedienung” macht ist das elend langsame Bluetoo-
■■ sowie ein einzelnes, digitales Objekt zum thmodul dass in dem NXT verbaut ist. Als geplante
testen liefert. Erweiterung könnte man hier noch ein Programm
schreiben dass autark auf dem Stein arbeitet und somit
die Sensorwerte automatisch verarbeiten kann ohne,
Martin Neundorfer | www.der9.de 15 / 16Richtig zupacken
die Befehle an den Rechner und von dort wieder
zurück schicken zu müssen.
Allerdings hat sich mir im Rahmen dieses Pro-
jektes nicht genau erschlossen wie ich mit Processing
eine Bluetoothverbindung auf baue und dann Werte
via Lego-Messenge hin und her schicken kann.
Aber Raum für Erweiterungen nach oben ist
ja immer. Deshalb hier einmal ein Video von der
Kombination Programm & Hardware:
Für alle die sich mit der Materie eingehender
beschäftigen möchten, habe ich außerdem noch das
Programm in meinem Blog hochgeladen, dass ich in
Processing geschrieben habe. Für dessen Ausführung
man allerdings, das sei hier noch einmal angemerkt,
die NXTcomm Library braucht. Ich gebe zu, dass
die Kommentare recht dürftig ausfallen, aber jedem
der in meiner Ausgangssituation ist und versucht
Lego-Mindstorms mit Processing zu kombinieren,
der kann sich mit Fragen gerne an mich wenden.
An dieser Stelle möchte ich auch noch kurz
meinem (immer fröhlichen ;)) Professor, Herrn
Wölwer bedanken, der mir dieses, nunja etwas extra-
vagante Projekt überhaupt erst möglich gemacht hat.
Weitere Informationen:
■■ Blogartikel mit mehr Bildern, Links und
Videos: http://wasmacht.der9.de/kategorie/
handeln/mindstorms/
■■ Vimeo Channel: www.vimeo.com/der9
Martin Neundorfer | www.der9.de 16 / 16Sie können auch lesen