R&STS-PSAM ANALOGES STIMULUS- UND MESSMODUL BEDIENHANDBUCH - (;ZÐÜ;) - ROHDE & SCHWARZ
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

R&S®TS-PSAM Analoges Stimulus- und Messmodul Bedienhandbuch (;ZðÜ;) 1142987811 Version 12
Dieses Handbuch beschreibt das folgende R&S®TSVP Modul: ● R&S®TS-PSAM © 2021 Rohde & Schwarz GmbH & Co. KG Mühldorfstr. 15, 81671 München, Germany Phone: +49 89 41 29 - 0 E-mail: info@rohde-schwarz.com Internet: www.rohde-schwarz.com Änderungen vorbehalten – Daten ohne Genauigkeitsangabe sind unverbindlich. R&S® ist ein eingetragenes Warenzeichen der Firma Rohde & Schwarz GmbH & Co. KG. Eigennamen sind Warenzeichen der jeweiligen Eigentümer. 1142.9878.11 | Version 12 | R&S®TS-PSAM Im vorliegenden Handbuch werden folgende Abkürzungen verwendet: R&S®PSAM wird abgekürzt mit R&S PSAM.

Safety Instructions
Instrucciones de seguridad
Sicherheitshinweise
Consignes de sécurité
Risk of injury and instrument damage
The instrument must be used in an appropriate manner to prevent
personal injury or instrument damage.
● Do not open the instrument casing.
● Read and observe the "Basic Safety Instructions" delivered as
printed brochure with the instrument.
● Read and observe the safety instructions in the following sections.
Note that the data sheet may specify additional operating conditions.
● Keep the "Basic Safety Instructions" and the product documentation
in a safe place and pass them on to the subsequent users.
Riesgo de lesiones y daños en el instrumento
El instrumento se debe usar de manera adecuada para prevenir
descargas eléctricas, incendios, lesiones o daños materiales.
● No abrir la carcasa del instrumento.
● Lea y cumpla las "Instrucciones de seguridad elementales"
suministradas con el instrumento como folleto impreso.
● Lea y cumpla las instrucciones de seguridad incluidas en las
siguientes secciones. Se debe tener en cuenta que las
especificaciones técnicas pueden contener condiciones adicionales
para su uso.
● Guarde bien las instrucciones de seguridad elementales, así como
la documentación del producto, y entréguelas a usuarios
posteriores.
1171.1307.42 - 05 1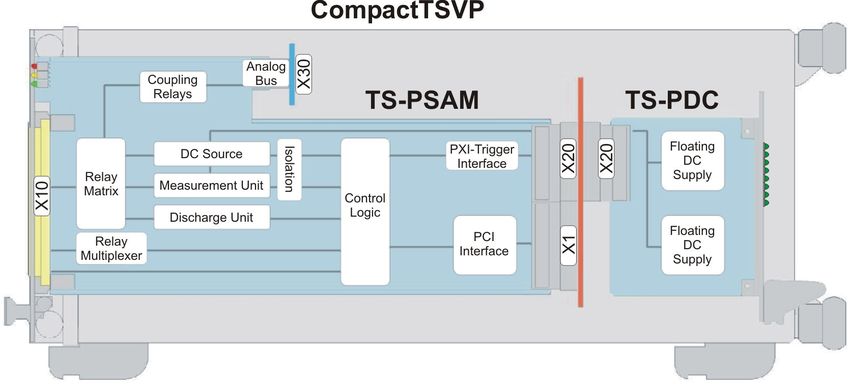
Gefahr von Verletzungen und Schäden am Gerät
Betreiben Sie das Gerät immer ordnungsgemäß, um elektrischen
Schlag, Brand, Verletzungen von Personen oder Geräteschäden zu
verhindern.
● Öffnen Sie das Gerätegehäuse nicht.
● Lesen und beachten Sie die "Grundlegenden Sicherheitshinweise",
die als gedruckte Broschüre dem Gerät beiliegen.
● Lesen und beachten Sie die Sicherheitshinweise in den folgenden
Abschnitten; möglicherweise enthält das Datenblatt weitere
Hinweise zu speziellen Betriebsbedingungen.
● Bewahren Sie die "Grundlegenden Sicherheitshinweise" und die
Produktdokumentation gut auf und geben Sie diese an weitere
Benutzer des Produkts weiter.
Risque de blessures et d'endommagement de l'appareil
L'appareil doit être utilisé conformément aux prescriptions afin d'éviter
les électrocutions, incendies, dommages corporels et matériels.
● N'ouvrez pas le boîtier de l'appareil.
● Lisez et respectez les "consignes de sécurité fondamentales"
fournies avec l’appareil sous forme de brochure imprimée.
● Lisez et respectez les instructions de sécurité dans les sections
suivantes. Il ne faut pas oublier que la fiche technique peut indiquer
des conditions d’exploitation supplémentaires.
● Gardez les consignes de sécurité fondamentales et la
documentation produit dans un lieu sûr et transmettez ces
documents aux autres utilisateurs.
1171.1307.42 - 05 2
R&S®TS-PSAM Anwendung
Eigenschaften des R&S TS-PSAM
1 Anwendung
1.1 Allgemeines
Das Analoge Stimulus- und Messmodul R&S TS-PSAM eignet sich für die universelle
Testplattform R&S CompactTSVP. Das Modul wird für analoge Messaufgaben, zur
Realisierung von In-Circuit-Messungen und den R&S CompactTSVP Selbsttest ver-
wendet. Die erdfreie Gleichspannungsversorgung des Moduls erfolgt über das zugehö-
rige Rear-I/O Modul R&S TS-PDC.
Das Modul R&S TS-PSAM wird frontseitig in das R&S CompactTSVP-Chassis
gesteckt.
Der frontseitige Steckverbinder schließt mit der Frontplatte des R&S CompactTSVP-
Chassis ab und wird zur Kontaktierung von Prüflingen oder Messproben verwendet.
Rückseitig ist das Modul R&S TS-PSAM mit dem cPCI-Steuerbus und dem PXI-Trig-
gerbus verbunden. Alternativ zum frontseitigen Steckverbinder können Messignale
über den analogen Messbus des R&S CompactTSVP abgegriffen werden.
Für die DMM Funktionen steht ein LabWindows IVI DMM Treiber zur Verfügung. Alle
anderen Funktionen der Hardware werden über spezifische Erweiterungen des Trei-
bers bedient. Wie für einen LabWindows CVI Treiber üblich, stehen Function Panels
und eine Online Hilfe zur Verfügung.
1.2 Eigenschaften des R&S TS-PSAM
1.2.1 Komponenten
Auf dem Modul R&S TS-PSAM befindet sich eine massebezogene Entladeschaltung,
eine erdfreie programmierbare Spannungsquelle und eine erdfreie Messeinheit. Diese
Komponenten können über eine Relaismatrix auf den Analogbus des R&S Com-
pactTSVP geschaltet werden. Zur Synchronisation von Messaufgaben sind getriggerte
Messungen über den PXI-Bus und die Triggereingänge am Frontsteckverbinder mög-
lich. Darüber hinaus stehen zwei Relaismultiplexer mit je vier Kanälen zur Verfügung.
Im Folgenden sind die wichtigsten Merkmale dieser drei Funktionsblöcke aufgeführt:
erdfreie Gleichspannungsquelle (DCS)
● einstellbare Spannungs- und Strombegrenzung
– ±5 V, 100 mA max.
● schnelle Einschwingzeit
● Vierquadrantenbetrieb
● Senseleitungen
Bedienhandbuch 1142.9878.11 ─ 12 3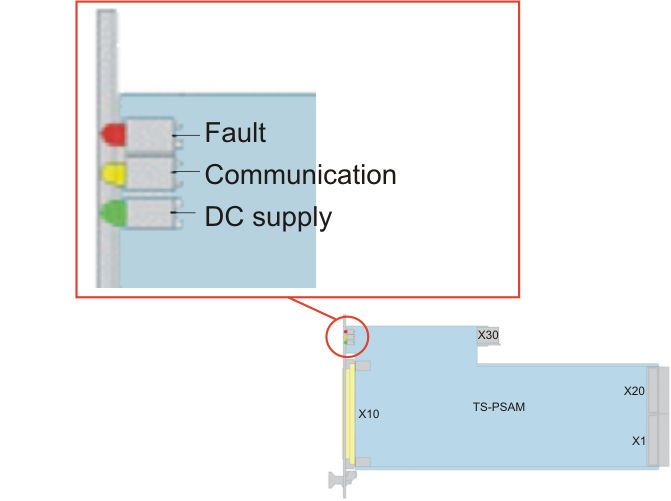
R&S®TS-PSAM Anwendung
Eigenschaften des R&S TS-PSAM
erdfreie Messeinheit (MU)
● Messbereich DC
– 10 mV - 125 V
– 1 µA - 1 A
● Messbereich ACrms
– 20 mV - 125 V
– 100 µA - 1 A
● getriggerte Messungen über den PXI Triggerbus
● 2 Trigger abgeleitet vom Messsignal mit programmierbarer Schwelle
● 4 Filter
● 16 Bit Wandler
– Samplerate 200 kHz (max.)
– Einzel- oder „Multipoint“ -Messung mit bis zu 8 k Samples Speichertiefe
Entladeschaltung (DCH)
● Entladestrom 400 mA (max.)
● Entladespannung 125V (max.)
1.2.2 Messfunktionen
Das Modul wird für analoge Messaufgaben, zur Realisierung von In-Circuit-Messungen
und den R&S CompactTSVP Selbsttest verwendet. Bei diesen Tests fungiert das
Modul als Spannungs-, Strom- und Widerstandsmesser mit einstellbarer Abtastrate.
Zur Widerstandsmessung wird die Messeinheit und die einstellbare Gleichspannungs-
quelle in geeigneter Weise miteinander verschaltet. Im Bedarfsfall kann die Quelle
auch mit GND verbunden werden. Die Messeinheit und die Gleichspannungsquelle
können aber auch unabhängig voneinander betrieben werden. Beim In-Circuit-Test
(ICT) werden folgende Messaufgaben von dem Modul R&S TS-PSAM durchgeführt:
● Entladen von Kondensatoren
● 2 und 4 Draht-Widerstandsmessungen (Bild 1-1 bis Bild 1-4)
● Kontaktierungstest
● Kurzschlusstest
● Verbindungstest
1.2.2.1 Widerstandsmessungen
Siehe hierzu auch Bild 1-1 bis Bild 1-4
Die Widerstandsmessung wird mit Hilfe der Gleichspannungsquelle und der Messein-
heit realisiert. Es sind Zwei- und Vierdrahtmessungen möglich. Dabei werden abhängig
vom zu messenden Widerstandswert zwei unterschiedliche Verfahren angewendet. Bei
Bedarf kann die Quelle mit GND verbunden werden.
● Modus C für kleine Widerstände
Bedienhandbuch 1142.9878.11 ─ 12 4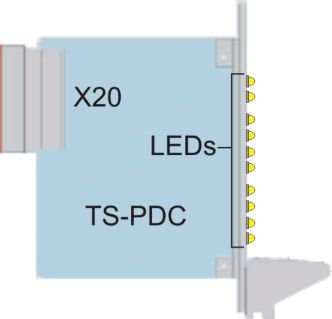
R&S®TS-PSAM Anwendung
Eigenschaften des R&S TS-PSAM
Bei dieser Messung wird ein konstanter Strom eingeprägt und die Spannung
gemessen. (siehe Bild 1-1 und Bild 1-2)
HI
DCS = V MU Rx
LO
Bild 1-1: Verschaltung bei einer 2 Draht-Widerstandsmessung im Mode C
HI RS
SHI
DCS = V MU Rx
SLO
LO
RM
Bild 1-2: Verschaltung bei einer 4 Draht-Widerstandsmessung im Mode C
● Modus V für große Widerstände
Bei dieser Messung wird die Spannung eingeprägt und der Stromgemessen.
(siehe Bild 1-3 und Bild 1-4)
Bedienhandbuch 1142.9878.11 ─ 12 5R&S®TS-PSAM Anwendung
Eigenschaften des R&S TS-PSAM
HI
DCS =
Rx
MU A
LO
Bild 1-3: Verschaltung bei einer 2 Draht-Widerstandsmessung im Mode V
HI RS
SHI
DCS =
Rx
MU A
SLO
LO
RM
Bild 1-4: Verschaltung bei einer 4 Draht-Widerstandsmessung im Mode V
Bedienhandbuch 1142.9878.11 ─ 12 6R&S®TS-PSAM Anwendung
Eigenschaften des R&S TS-PSAM
1.2.2.2 ICT Messungen zusammen mit TS-PICT
Siehe hierzu auch Bild 1-5 und Bild 1-6
In Verbindung mit dem Modul R&S TS-PICT (ICT Erweiterungsmodul) sind zusätzliche
In-Circuit-Messungen möglich. Diese sind:
● Dioden-/Transistortest
● geguardete Widerstandsmessungen (3, 4 und 6 Draht)
● Impedanzmessungen (3, 4 und 6 Draht)
Hierzu stellt das Modul R&S TS-PICT eine spezielle Wechselspannungsquelle (AOS)
und Strommesseinheit (CMU) zur Verfügung.
Die Anschaltung des Prüflings erfolgt beim In-Circuit-Test (ICT) über das Modul R&S
TS-PMB (Matrixmodul B).
A1
A2 R1
DCS =
C
Rx
D
CMU A
B2 R2
B1
Bild 1-5: Verschaltung bei einer geguardeten Widerstandsmessung (6- Draht)
Bedienhandbuch 1142.9878.11 ─ 12 7R&S®TS-PSAM Anwendung
Eigenschaften R&S TS-PDC
Bild 1-6: Verschaltung bei einer geguardeten Impedanzmessung (6-Draht)
1.3 Eigenschaften R&S TS-PDC
Das Modul R&S TS-PDC dient dem Modul R&S TS-PSAM als erdfreie Gleichspan-
nungsversorgung. Der Aufbau ist über zwei identische DC/DC-Wandler realisiert. Über
eine Eingangsspannung von 5 VDC werden folgende erdfreie Gleichspannungen
gewonnen:
● +15 VDC ±5%, 0,5A (2x)
● -15 VDC ±5%, 0,5A (2x)
● +5 VDC ±5%, 0,5A (2x)
● +3,3 VDC ±5%, 0,25A (2x)
Bedienhandbuch 1142.9878.11 ─ 12 8R&S®TS-PSAM Ansicht
2 Ansicht
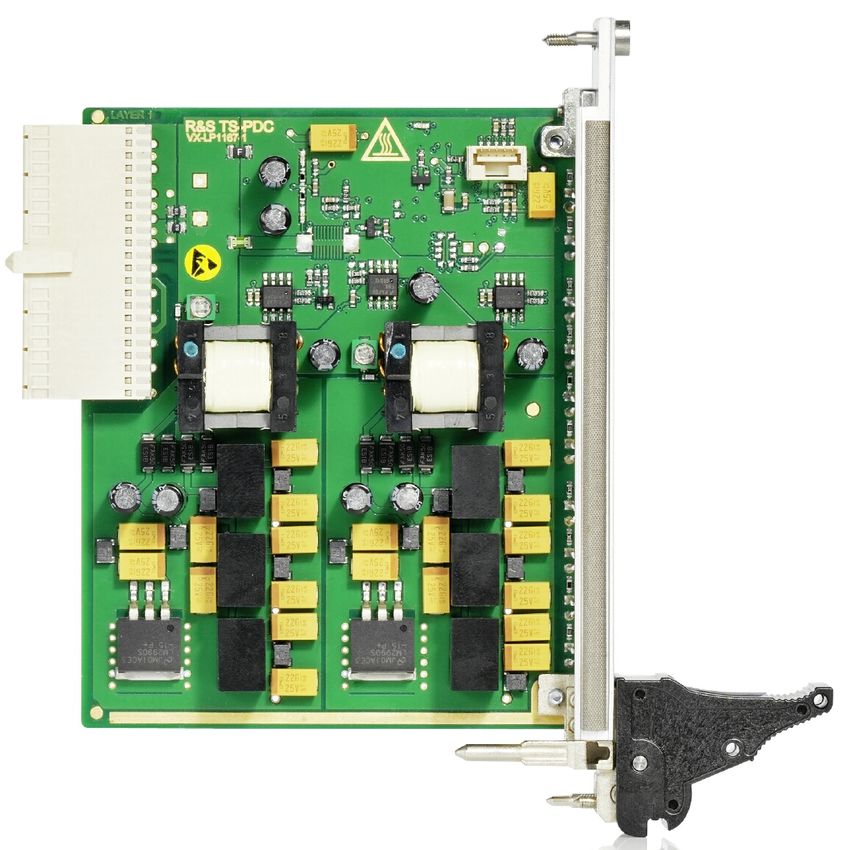
Bild 2-1 zeigt das Modul R&S TS-PSAM ohne das zugehörige Rear-I/O Modul R&S
TS-PDC. Das Rear-I/O Modul R&S TS-PDC ist in Bild 2-2 abgebildet.
Bild 2-1: Ansicht des Moduls R&S TS-PSAM
Bedienhandbuch 1142.9878.11 ─ 12 9R&S®TS-PSAM Ansicht
Bild 2-2: Ansicht des Rear-I/O Moduls R&S TS-PDC
Das Modul R&S TS-PDC existiert in 3 verschiedenen Ausführungen:
● Vergossen in einem schwarzen Gehäuse - Version bis 1.8 (1157.9804.02 obsolet)
● Gekapselt im Metallgehäuse mit Kühlrippen - Version 1.9 (1157.9804.02 obsolet)
● Ohne Gehäuse - Version ab 2.0 (1157.9804.12 aktuelle Version)
Bedienhandbuch 1142.9878.11 ─ 12 10R&S®TS-PSAM Blockschaltbilder
3 Blockschaltbilder
Bild 3-1 zeigt das Blockschaltbild des Moduls R&S TS-PSAM und Bild 3-2 das Block-
schaltbild des Moduls R&S TS-PDC. Bild 3-3 zeigt das vereinfachte Funktionsblock-
schaltbild beider Module im R&S CompactTSVP.
Analog Bus Connector X30
a1 a2 b1 b2 c1 c2 d1 d2
Analog Bus (AB)
DCH DCH_HI
DCS_HI
DCS
DCS_SHI
DCS_SLO SENSE
DCS_LO
MU_HI
MU
MU
MU_SHI
Front Connector X10
MU_SLO
MU_LO
Local
Analog Bus
Isolation (LAB)
a1 a2 b1 b2 c1 c2 d1 d2
XTA1, XTA2
PXI_TRIG0..
PXI_TRIG7 XTO1, XTO2
Trigger
XTI1, XTI2
AUX1, AUX2
Extension Connector X20
RACH1
RACH2
RACH3
GA0..GA4
Ge ograph ic RACH4
A d dres sin g
RACOM
SP I In te rfa ce RBCH1
RBCH2
C PC I
CPCI Bus Connector X1
Inte rface RBCH3
RBCH4
RBCOM
GND
GND CHA-GND
~
=
~
=
Bild 3-1: Blockschaltbild R&S TS-PSAM
Bedienhandbuch 1142.9878.11 ─ 12 11R&S®TS-PSAM Blockschaltbilder
Regulator
1
COM
primary -15 V
X 20
GND DC-Transducer
Regulator
ON/OFF 2 COM
-15 V
INHIBIT
Bild 3-2: Blockschaltbild R&S TS-PDC
Bild 3-3: Funktionsblockschaltbild R&S TS-PSAM mit R&S TS-PDC im R&S CompactTSVP
Bedienhandbuch 1142.9878.11 ─ 12 12R&S®TS-PSAM Aufbau
Mechanischer Aufbau R&S TS-PSAM
4 Aufbau
4.1 Mechanischer Aufbau R&S TS-PSAM
Siehe hierzu auch Bild 4-1.
Das Modul R&S TS-PSAM ist als langes cPCI-Einsteckmodul für den frontseitigen Ein-
bau in den R&S CompactTSVP ausgeführt. Die Platinenhöhe des Moduls beträgt 3 HE
(134 mm). Um ein sicheres Einschieben in den Compact TSVP zu gewährleisten ist
die Frontblende mit einem Führungsstift bestückt. Die Arretierung des Moduls
geschieht mit den beiden Befestigungsschrauben der Fontblende. Der frontseitige
Steckverbinder X10 dient zum Anschluss von Prüflingen. Der Steckverbinder X30 ver-
bindet das Modul R&S TS-PSAM mit der Analogbus-Backplane im R&S Com-
pactTSVP. Die Steckverbinder X20/X1 verbinden das Modul R&S TS-PSAM mit der
cPCI-Backplane/PXI-Steuerbackplane.
Bild 4-1: Anordnung der Steckverbinder und LEDs am Modul R&S TS-PSAM
Tabelle 4-1: Steckverbinder des Moduls R&S TS-PSAM
Kurzzeichen Verwendung
X1 cPCI Bus
X10 Prüfling (UUT)
X20 Erweiterung (PXI), Rear-I/O
X30 Analog Bus
Bedienhandbuch 1142.9878.11 ─ 12 13R&S®TS-PSAM Aufbau
Mechanischer Aufbau R&S TS-PDC
4.2 Anzeigeelemente des Moduls R&S TS-PSAM
Siehe hierzu auch Bild 4-2
Auf der Frontseite des Moduls R&S TS-PSAM sind drei Leuchtdioden (LED) angeord-
net, diese zeigen den aktuellen Status des Moduls. Die LEDs haben folgende Bedeu-
tung:
Bild 4-2: Anordnung der LEDs am Modul R&S TS-PSAM
Tabelle 4-2: Anzeigeelemente am Modul R&S TS-PSAM
LED Beschreibung
rot Fehlerzustand (ERR):
Leuchtet, wenn nach dem Einschalten der Versor-
gungsspannung ein Fehler beim Einschalttest auf
dem Modul R&S TS-PSAM auftritt. Dies bedeutet
das ein Hardwareproblem auf dem Modul besteht.
(siehe auch Kapitel 8, "Selbsttest", auf Seite 40)
gelb Kommunikation (COM):
Leuchtet, bei Datenverkehr über das Interface auf.
grün Versorgungsspannung in Ordnung (PWR):
Leuchtet, wenn alle nötigen Versorgungsspannun-
gen anliegen (inklusive der R&S TS-PDC Spannun-
gen).
4.3 Mechanischer Aufbau R&S TS-PDC
Siehe hierzu auch Bild 4-3
Das Modul R&S TS-PDC ist ein Rear-I/O-Modul für den rückseitigen Einbau in den
R&S CompactTSVP. Die Platinenhöhe des Moduls beträgt 3 HE (134 mm). Die Fixie-
rung des Moduls geschieht mit den beiden Befestigungsschrauben der Frontblende.
Der Steckverbinder X20 verbindet das Modul R&S TS-PDC mit der Extension-Back-
Bedienhandbuch 1142.9878.11 ─ 12 14R&S®TS-PSAM Aufbau
Anzeigeelemente des Moduls R&S TS-PDC
plane im R&S CompactTSVP. Das Modul R&S TS-PDC muss immer den entsprechen-
den Rear-I/O Slot zum Hauptmodul (z.B. Modul R&S TS-PSAM) verwenden.
Das Modul R&S TS-PDC muss immer am entsprechenden Rear-I/O Slot des Moduls
R&S TS-PSAM gesteckt werden.
Bei fehlerhaftem Stecken (z.B. cPCI/PXI Standardmodulen im Frontbereich) können
beide Module zerstört werden.
Bild 4-3: Anordnung des Steckverbinders und LEDs am Modul R&S TS-PDC
Tabelle 4-3: Steckverbinder des Moduls R&S TS-PDC
Kurzzeichen Verwendung
X20 Extension (Rear I/O)
4.4 Anzeigeelemente des Moduls R&S TS-PDC
4.4.1 R&S TS-PDC Version kleiner 2.0 (1157.9804.02)
Der aktuelle Status des Moduls wird über 8 grüne LEDs signalisiert, wobei jede LED
das Vorhandensein einer Ausgangsspannung anzeigt.
Im fehlerfreien Betrieb müssen gleichzeitig alle 8 LEDs leuchten.
4.4.2 R&S TS-PDC ab Version 2.0 (1157.9804.12)
Der aktuelle Status des Moduls wird über 10 LEDs signalisiert.
Bedienhandbuch 1142.9878.11 ─ 12 15R&S®TS-PSAM Aufbau
Anzeigeelemente des Moduls R&S TS-PDC
Im eingeschalteten Zustand wird durch die grüne LED PWR der Power-On Status
angezeigt. Im fehlerfreien Betrieb leuchten zusätzlich die 8 grünen LEDs für jede
erzeugte Ausgangsspannung.
Im Falle einer Überlastung oder Übertemperatur schaltet das Modul eigenständig ab.
Der Fehler wird durch die rote LED ERR signalisiert.
Bild 4-4: LEDs am Modul R&S TS-PDC ab Version 2.0
Bedienhandbuch 1142.9878.11 ─ 12 16R&S®TS-PSAM Funktionsbeschreibung
Funktionsbeschreibung zum Modul R&S TS-PSAM
5 Funktionsbeschreibung
5.1 Funktionsbeschreibung zum Modul R&S TS-PSAM
5.1.1 Primär-Matrix und Analoger Messbus
Siehe hierzu auch Bild 3-1.
Das Konfigurieren des Moduls R&S TS-PSAM für die Strom- oder Widerstandsmes-
sung führt dazu, dass der Eingang der Messeinheit niederohmig wird. Eine am Ein-
gang anliegende Spannung führt daher zu einem Stromfluss durch das Modul, der die
Relais zerstören kann. Es wird daher dringend empfohlen, das Modul R&S TS-PSAM
in den Messmodus „Spannungsmessung“ zu versetzen, bevor Verschaltungen damit
durchgeführt werden.
Matrixrelais
Über eine Vollmatrix können die Stimulus- und Messeinheit wahlfrei auf den lokalen
Analogbus (8 Leitungen LABx) verschaltet werden. Die Entladeschaltung kann nur mit
den Leitungen LABa1 und LABa2 verbunden werden.
Für die Verschaltung der Matrixrelais stehen zwei Möglichkeiten zur Verfügung.
● „Route“ Funktionen
● „Low-level-switching“ Funktion
Route Funktionen
Mit Hilfe der Funktionen rspsam_Connect, rspsam_Disconnect und
rspsam_DisconnectAll können folgende Kanäle der Matrix bedient werden:
Lokaler Analog Bus:
ABa1, ABa2, ABb1, ABb2, ABc1, ABc2, ABd1, ABd2
DMM Funktion Widerstandsmessung:
DMM_HI, DMM_LO, DMM_SHI, DMM_SLO
Einzelkomponenten:
DCH_HI MU_HI, MU_LO, DCS_HI, DCS_LO, DCS_SHI, DCS_SLO
Die Kanalnamen „ABxy“ bezeichnen unabhängig von der Konfiguration der Bus-Kop-
pel-Relais (rspsam_ConfigureCoupling) immer die Leitungen des lokalen Analog-
busses. Die Route-Funktionen des Treibers bedienen nicht die Bus-Koppel-Relais.
Bedienhandbuch 1142.9878.11 ─ 12 17R&S®TS-PSAM Funktionsbeschreibung
Funktionsbeschreibung zum Modul R&S TS-PSAM
Die Kanäle der Einzelkomponenten MU und DCS können nicht verschaltet werden,
wenn die Messfunktion (rspsam_ConfigureMeasurement) Widerstandsmessung
konfiguriert ist. In diesem Fall müssen die DMM Kanäle verwendet werden. Bei der
Widerstandsmessung werden die Komponenten MU und DCS über interne Konfigurati-
onsrelais abhängig vom gewählten Bereich miteinander verbunden (siehe Bilder
Bild 1-1 bis Bild 1-4). Bei einer 4 Drahtmessung im Modus C entspricht z.B. die Leitung
DMM_SHI dem Kanal MU_HI der Messeinheit. Bei der 4 Draht Messung im Modus V
entspricht DMM_LO dem Kanal MU_HI der Messeinheit!
Wenn die Komponenten MU und DCS unabhängig voneinander verwendet werden sol-
len, muss die Messeinheit in der Funktion (rspsam_ConfigureMeasurement) Span-
nungs- oder Strommessung betrieben werden. Bei diesen Funktionen sind die Konfigu-
rationsrelais so eingestellt, dass die Kanäle der Einzelkomponenten verschaltet wer-
den können.
Die Switch-Kanäle können auch mit Hilfe der GTSL Signal Routing Library bedient
werden. Die „Route“-Funktionen bilden das Interface zu dieser Bibliothek. Die Bus-
Koppel-Relais werden von der Routing Library automatisch bedient.
Low-level-switching Funktion
Die Funktion rspsam_cnx_Matrix bedient die Relais auf einer unteren Software-
ebene. Sie sollte nicht zusammen mit den „Route“ Funktionen
(rspsam_Connect und rspsam_Disconnect) verwendet werden.
Bus-Koppel-Relais
Mit der Funktion rspsam_ConfigureCoupling können die Leitungen des lokalen
Analogbusses (LAB) mit dem systemweiten Analogbus (AB) des CompactTSVP ver-
bunden werden. Dadurch können die Komponenten des Moduls mit Hilfe von Matrix-
schaltmodulen (z.B. TS-PMB) auf viele Testpunkte gemultiplext werden.
Die GTSL Bibliothek „Signal Routing“ bedient die Bus-Koppel-Relais automatisch.
Die Funktion rspsam_DisconnectAll öffnet nicht die Bus-Koppel-Relais.
Masserelais
Die Kanäle MU_LO und DCS_LO können bei Bedarf mit der Systemmasse verbunden
werden. Die Komponenten werden dann erdbezogen betrieben. Die Funktion
rspsam_ConfigureGround schaltet abhängig von der gewählten Messfunktion das
entsprechende Relais. Bei einer Widerstandsmessung wird DCS_LO mit GND verbun-
den. Bei allen anderen Messfunktionen wird MU_LO mit GND verschaltet. Wenn die
Komponenten MU und DCS unabhängig voneinander verwendet werden sollen, kann
mit Hilfe der Funktion rspsam_cnx_Gnd selektiv der erdbezogene Betrieb konfiguriert
werden.
Widerstandsmessungen bei denen GND als DMM_LO verwendet werden soll, sind nur
im 1 Ohm und 10 Ohm Bereich möglich. In diesem Bereichen wird der Modus C ver-
wendet und die DMM_LO Leitung kann durch GND ersetzt werden. Siehe hierzu auch
Bedienhandbuch 1142.9878.11 ─ 12 18R&S®TS-PSAM Funktionsbeschreibung
Funktionsbeschreibung zum Modul R&S TS-PSAM
Abschnitt Kapitel 1.2.1, "Komponenten", auf Seite 3 und Kapitel 5.1.4, "Widerstands-
messung", auf Seite 21.
Die GTSL Bibliotheken DMM und DCPWR stellen die Funktionen
DMM_Conf_Ground_Relay bzw. DCPWR_Conf_Ground_Relay zur Konfiguration
des erdbezogenen Betriebs zur Verfügung.
Aus technischen Gründen wird eine nicht verschaltete Komponente (alle Matrixrelais
geöffnet) automatisch über das entsprechende Masse-Relais geerdet. Es wird automa-
tisch wieder geöffnet, wenn die Komponente erdfrei konfiguriert ist, bevor eine neue
Verschaltung mit den Analogbusleitungen durchgeführt wird.
Die Funktion rspsam_DisconnectAll öffnet nicht die Masserelais.
Konfigurationsrelais
Die Konfigurationsrelais verbinden MU und DCS für die Widerstandsmessung. Diese
Relais werden automatisch in Abhängigkeit von Messfunktion und Messbereich von
der Treibersoftware bedient. Die Funktion rspsam_dmc_Select sollte nur in Ausnah-
mefällen verwendet werden.
5.1.2 Spannungs- und Strommesseinheit (MU)
(MU = Measurement Unit)
AC und DC Spannungen sowie Ströme werden mit der MU gemessen. Die beiden MU-
Eingänge können über die Vollmatrix auf den lokalen 8-Draht Analogbus geschaltet
werden.
Gleichspannungsmessung
Die Gleichspannungsmessung erfolgt potentialfrei mit programmierbarer Vorfilterung
und einstellbaren Bereichen. Die Analog/Digital-Wandlung geschieht mit einem seriel-
len A/D-Konverter, dessen Ausgangsdaten in einem FIFO-Speicher abgespeichert
werden.
Low Pass Filter (-3 dB): (MU Filter) 4 Bereiche, 400 Hz, 4 kHz, 40 kHz, 100 kHz (gilt
auch für Strommessungen)
Überspannungsschutz: 200 V max.
Analoge Bandbreite (-3 dB): >500 kHz
A/D Konverter: Auflösung: 16 bit Abtastrate: 200 kHz max.
FIFO: 8k
Wechselspannungsmessung
Die Wechselspannungsmessfunktion ist mit einem RMS-to-DC-Konverter realisiert.
Dabei wird die an den Eingängen anliegende Wechselspannung in eine DC-Ausgangs-
spannung konvertiert, die proportional zum echten RMS-Wert des Eingangssignals ist.
Die konvertierte DC-Ausgangsspannung wird vom A/D Konverter verarbeitet.
Bedienhandbuch 1142.9878.11 ─ 12 19R&S®TS-PSAM Funktionsbeschreibung
Funktionsbeschreibung zum Modul R&S TS-PSAM
Alternativ zum RMS-to-DC-Konverter kann der Effektivwert der Wechselgröße auch
durch Erfassen der Kurvenform im DC-Modus mit anschließender Analyse ermittelt
werden. Die Funktionen rspsam_ConfigureRmsMethod und
rspsam_ConfigureRmsEval stehen dafür zur Verfügung.
DC-Strommessung
Die Messeinheit ist für Strommessungen von wenigen 100 Nanoamperes bis zu 1 A
geeignet. Sie kann einschränkungsfrei über eine Vollmatrix auf den 8-Draht Analogbus
geschaltet werden. Ströme grösser 100 mA werden über einen Shunt-Widerstand
gemessen. Ströme kleiner 100 mA werden dagegen aktiv über einen Strom-Span-
nungs-Wandler (I/U-Wandler) gemessen.
Wechselstrommessung
Der AC-Strom wird mittels Shunt oder I/U-Wandler in eine AC-Spannung und durch
den RMS-to-DC-Konverter in eine DC-Spannung umgewandelt, die vom A/D Konverter
verarbeitet wird.
Alternativ zum RMS-to-DC-Konverter kann der Effektivwert der Wechselgröße auch
durch Erfassen der Kurvenform im DC-Modus mit anschließender Analyse ermittelt
werden. Die Funktionen rspsam_ConfigureRmsMethod und
rspsam_ConfigureRmsEval stehen dafür zur Verfügung.
Bedienung
Neben den Treiberfunktionen steht auch die GTSL Bibliothek DMM zur Bedienung der
Messeinheit zur Verfügung.
5.1.3 DC-Stimulusquelle (DCS)
(DCS = DC Source)
Die DCS ist eine potentialfreie, programmierbare DC-Spannungsquelle mit einstellba-
rer Strombegrenzung und Sense-Leitungen, zum Ausgleich von Spannungsabfällen
durch Schaltwege zum Verbraucher. Sie kann, abhängig von den Testanforderungen,
entweder im Spannungsbetrieb oder im Strombegrenzungsbetrieb arbeiten. Auch ein
gepulster Betrieb ist möglich.
DC-Stimulus-Quellen-Spezifikation
Tabelle 5-1: Spannungsbetrieb
Spannungsbereich: 0 ... ±5 V
Strom: 0 ... ±100 mA max.
Tabelle 5-2: Strombegrenzungsbetrieb
Spannungsbereich: ±0,1 V ... ±5 V max.
Strombegrenzungsbereiche: ±100 mA, 10 mA, 1 mA, 0,1 mA
Bedienhandbuch 1142.9878.11 ─ 12 20R&S®TS-PSAM Funktionsbeschreibung
Funktionsbeschreibung zum Modul R&S TS-PSAM
Bedienung
Die Komponente DCS wird mit Hilfe der folgenden Funktionen bedient:
rspsam_dcs_ConfigureOutputEnabled
rspsam_dcs_ConfigureVoltageLevel
rspsam_dcs_ConfigureCurrentLimitRange
rspsam_dcs_ConfigureCurrentLimit
rspsam_dcs_ConfigurePulsedMode
rspsam_dcs_QueryOutputState
Auch die GTSL Bibliothek DCPWR unterstützt die Komponente DCS des Moduls TS-
PSAM.
5.1.4 Widerstandsmessung
Siehe hierzu auch die Bilder Bild 1-1 bis Bild 1-4.
Mit der DC-Stimulus (DCS)- und der Strommesseinheit (MU) können Widerstände wie
folgt gemessen werden:
● Eine bekannte DC-Spannung Vs wird an den zu messenden Widerstand angelegt
und der resultierende Strom mit der MU gemessen (Modus V).
● Ein bekannter DC-Strom Is wird durch die DCS am Widerstand eingeprägt und der
resultierende Spannungsabfall am Widerstand mit der MU gemessen (Modus C).
Die Widerstandsmessung wird mit Hilfe der Funktion „rspsam_ConfigureMeasurement“
aktiviert. Abhängig vom Parameter „measurementFunction“ wird eine 2-Draht
(RSPSAM_VAL_2_WIRE_RES) oder 4-Draht (RSPSAM_VAL_4_WIRE_RES) Mes-
sung konfiguriert. Der Parameter range bestimmt u.a. auch die Verschaltung der Kom-
ponenten MU und DCS. Im 1 Ohm und 10 Ohm Bereich wird der Modus C fest einge-
stellt (siehe Bild 1-1 und Bild 1-2). In allen anderen Bereichen wird Modus V aktiviert
(siehe Bild 1-3 und Bild 1-4). Die Widerstandsmessfunktion der TS-PSAM ist für In-Cir-
cuit Tests optimiert. Durch die Einprägung der Spannung im Modus V können Wider-
stände, die in einer Schaltung parallel zu einem Kondensator liegen, sehr schnell
gemessen werden, da ein relativ hoher Ladestrom zur Verfügung steht. Allerdings hat
der Modus V den Nachteil, dass die LO-Leitung nicht durch GND ersetzt werden kann
(siehe Bild 1-3). Im Modus V führt auch ein zu kleiner Widerstandswert zu einer ungüti-
gen Messung, wenn der eingestellte Maximalstrom der DCS überschritten und damit
die Quelle durch automatisches Absenken der Spannung den Strom begrenzt. Die fol-
gende Tabelle zeigt die Zusammenhänge:
Bereich Modus Spannung Strom
0.1 Ω to 1 Ω C 0.5 V max. 100 mA
1 Ω to 10 Ω C 0.2 V max. 10 mA
10 Ω to 100 Ω V 0.2 V 25 mA max.
100 Ω to 1 kΩ V 0.2 V 2.5 mA max.
Bedienhandbuch 1142.9878.11 ─ 12 21R&S®TS-PSAM Funktionsbeschreibung
Funktionsbeschreibung zum Modul R&S TS-PSAM
Bereich Modus Spannung Strom
1 kΩ to 10 kΩ V 0.2 V 1 mA max.
10 kΩ to 100 kΩ V 0.2 V 0.1 mA max.
100 kΩ to 1 MΩ V 1V 0.1 mA max.
1 MΩ to 10 MΩ V 5V 0.1 mA max.
Durch individuelle Programmierung und Verschaltung der Komponenten MU (mit
Spannungs- oder Strommessung) und DCS können auch Widerstände größer 10 Ohm
unter Verwendung der Systemmasse (GND) als Messleitung beurteilt werden. Vor
allem bei Konfigurationen mit großen Widerständen, parallelgeschalteten Kapazitäten
und Stromeinprägung müssen Ladezeiten berücksichtigt werden.
5.1.5 Entladeeinheit DCH
(DCH = Discharge Unit)
Die Entladeeinheit ist dafür vorgesehen, Kondensatoren auf dem UUT kontrolliert zu
entladen, um eine Zerstörung von Schaltrelais des Testsystems oder ein Aufladen des
Prüflings durch den Testvorgang zu vermeiden. Hierzu wird mit einem aktiven Strom-
begrenzer ein konstanter Entladestrom erzeugt. Ein integrierter Überhitzungsschutz
verhindert eine Überlastung der Schaltung. Die Restspannung nach der Entladung
liegt typisch unter 100 mV. Über Relais kann die DCH mit dem lokalen Analogbus ver-
bunden werden.
Um die Belastung der Schaltrelais zu minimieren, sollte zunächst der Schaltpfad einge-
stellt und dann erst das DCH aktiviert werden.
Tabelle 5-3: Technische Daten
Entladestrombereiche: (typisch) 400 mA, 275 mA, 150 mA und 10 mA
Entladeart: Konstantstrom
Maximale Spannung: ±125 VDC
Endladerestspannung:R&S®TS-PSAM Funktionsbeschreibung
Funktionsbeschreibung zum Modul R&S TS-PSAM
Die Synchronisation des Moduls R&S TS-PSAM mit anderen Systemkomponenten
kann durch Triggersignale vom PXI-Triggerbus als auch durch lokale Triggerereignisse
oder “Software-Trigger“ erfolgen. Dabei kann das Modul R&S TS-PSAM als “Trigger-
Master“ oder “Trigger-Slave“ agieren.
Trigger-Eingänge
Die interne FPGA Hardware verwendet die globalen Trigger-Eingangssignale des PXI
Trigger Bus (PXI_TRIG0 ... PXI_TRIG7), und die lokalen TTL-Triggereingänge am
Frontsteckverbinder (XTI1, XTI2). Desweiteren werden die vom analogen Eingangssig-
nal abgeleiteten Triggersignale (XTA1, XTA2) und die vier internen Feed-Back-Trigger-
leitungen der Triggerlogik-Blöcke (IT01 ... IT04) zur Erkennung eines Triggerereignis-
ses verwendet. Die Auswahl der berücksichtigten Signale und deren Pegel (High/Low)
erfolgt über Konfigurationsregister.
Triggerlogik-Blöcke
Auf dem Modul sind vier Triggerlogik-Blöcke implementiert. Die Blöcke 1 und 2 stehen
dem Anwender zur Verfügung. Sie können zur Generierung von Triggerimpulsen (Ein-
zelpuls, Impulsfolgen usw.) verwendet werden. Block 3 ist für den gepulsten Betrieb
der Komponente DCS reserviert. Block 4 steuert die Abtastung der Messeinheit.
Triggerausgänge
Die Ausgänge der Triggerlogik-Blöcke können auf die Triggerausgänge am Frontsteck-
verbinder (XTOx) sowie auf den PXI-Triggerbus (PXI_TRIGx) geschaltet werden.
Dabei ist die Identität des Triggersignals programmierbar. Die Triggerausgangssignale
sind TTL-kompatibel und über Treiberbausteine gepuffert.
Bedienhandbuch 1142.9878.11 ─ 12 23R&S®TS-PSAM Funktionsbeschreibung
Funktionsbeschreibung zum Modul R&S TS-PSAM
Bild 5-1: Blockschaltbild der Trigger Hardware
Bedienhandbuch 1142.9878.11 ─ 12 24R&S®TS-PSAM Funktionsbeschreibung
Funktionsbeschreibung zum Modul R&S TS-PDC
Bedienung
Zur Konfiguration der Triggerlogik stehen folgende Funktionen zur Verfügung:
rspsam_trig_ConfigureOutput
rspsam_trig_ConfigureSignal
rspsam_trig_Abort
rspsam_trig_EnableOutput
rspsam_trig_SendSoftwareSignal
5.2 Funktionsbeschreibung zum Modul R&S TS-PDC
Siehe hierzu auch Bild 3-2.
Der DC/DC-Wandler ist als primär getakteter DC-Schaltwandler ausgeführt. Die Ein-
gangsspannung (5 VDC) wird auf zwei sekundäre Potenziale übertragen und über
Line-Regler auf die Nennspannung gebracht. Der Status der jeweiligen Ausgangs-
spannung wird durch eine LED angezeigt.
Folgende Gleichspannungen werden erzeugt:
● +15 VDC, 0,5A (2x)
● -15 VDC, 0,5A (2x)
● +5 VDC, 0,5A (2x)
● +3,3 VDC, 0,25A (2x)
Bedienhandbuch 1142.9878.11 ─ 12 25R&S®TS-PSAM Inbetriebnahme
Installation des Moduls R&S TS-PDC
6 Inbetriebnahme
6.1 Installation des Moduls R&S TS-PSAM
Zur Installation des Einsteckmoduls ist wie folgt vorzugehen:
● Herunterfahren und Ausschalten des TSVP.
● Auswahl eines geeigneten frontseitigen Steckplatzes. Siehe hierzu Bedienhand-
buch „CompactTSVP R&S TS-PCA3“ bzw. „PowerTSVP R&S TS-PWA3“ jeweils
Kapitel „Erlaubte Modulkonfigurationen“.
● Slot 5-14 möglich, vorzugsweise Slot 8.
● Bei einer In-Circuit-Test-Konfiguration sollte R&S TS-PSAM auf Slot 8, R&S TS-
PICT auf Slot 9 stecken.
● Entfernen der entsprechenden Teilfrontplatte an der Rückseite des TSVP-Gehäuse
durch Lösen der Schrauben.
Beschädigung der Backplane durch verbogene Pins
Durch verbogene Pins kann die Backplane dauerhaft beschädigt werden.
Die Backplane-Steckverbinder sind auf verbogene Pins zu überprüfen.
Verbogene Pins müssen ausgerichtet werden.
Beim Einschieben des Einsteckmoduls ist dieses mit beiden Händen zu führen und
vorsichtig in die Backplane-Steckverbinder einzudrücken.
● Einschieben des Einsteckmoduls mit mäßigem Druck (Fixierung über den Füh-
rungsstift)
● Das Einsteckmoduls ist richtig eingeschoben, wenn ein deutlicher Anschlag zu
spüren ist.
● Die Schrauben oben und unten an der Frontplatte des Einsteckmoduls festschrau-
ben.
Gemäß Abschnitt 6.2 das zugehörige Rear-I/O Modul R&S TS-PDC installieren.
6.2 Installation des Moduls R&S TS-PDC
Zur Installation des Einsteckmoduls ist wie folgt vorzugehen:
● Voraussetzung ist die Installation des Moduls R&S TS-PSAM
Bedienhandbuch 1142.9878.11 ─ 12 26R&S®TS-PSAM Inbetriebnahme
Installation des Moduls R&S TS-PDC
● Entsprechenden Rear-I/O-Slot zum Modul R&S TS-PSAM auswählen
● Entfernen der entsprechenden Teilrückplatte am R&S CompactTSVP-Chassis
durch Lösen der beiden Schrauben
Beschädigung der Backplane durch verbogene Pins
Durch verbogene Pins kann die Backplane dauerhaft beschädigt werden.
Die Backplane-Steckverbinder sind auf verbogene Pins zu überprüfen.
Verbogene Pins müssen ausgerichtet werden.
Beim Einschieben des Einsteckmoduls ist dieses mit beiden Händen zu führen und
vorsichtig in die Backplane-Steckverbinder einzudrücken.
● Einschieben des Einsteckmoduls mit mäßigem Druck
● Das R&S TS-PDC Modul muss besonders vorsichtig eingeschoben werden, damit
der Stecker korrekt in die Führung des Steckerbinders in der Backplane eingeführt
wird und nicht beispielsweise versetzt. Die kurzen Leiterplattenführungen allein
gewährleisten keine absolut sichere Führung.
● Mehrere benachbarte R&S TS-PDC Module sollten immer in der Reihenfolge „von
links nach rechts“ eingeschoben und in umgekehrter Reihenfolge herausgezogen
werden. Wegen der Enge ist darauf zu achten, dass keine Bauteile auf der Lötseite
der Baugruppe beschädigt werden.
● Das Einsteckmodul ist richtig eingeschoben, wenn ein deutlicher Anschlag zu spü-
ren ist.
● Die beiden Befestigungsschrauben an der Frontplatte des Moduls festschrauben.
Bedienhandbuch 1142.9878.11 ─ 12 27R&S®TS-PSAM Software
Soft-Panel
7 Software
7.1 Treibersoftware
Für die DMM Funktionen steht ein LabWindows IVI DMM Treiber zur Verfügung. Alle
anderen Funktionen der Hardware werden über spezifische Erweiterungen des Trei-
bers bedient. Der Treiber ist Bestandteil der ROHDE & SCHWARZ GTSL-Software.
Alle Funktionen des Treibers sind in der Online-Hilfe und in den Labwindows CVI
Function-Panels ausführlich dokumentiert.
Bei der Treiberinstallation werden die folgenden Softwaremodule installiert:
Tabelle 7-1: Treiberinstallation R&S TS-PSAM
Modul Pfad Anmerkung
rspsam.dll \ Treiber
Bin
rspsam.chm \ Hilfedatei
Bin
rspsam.fp \ LabWindows CVI-Function-Panel-File, Function-Panels für
Bin CVI-Entwicklungsumgebung
rspsam.sub \ LabWindows CVI-Attribute-Datei. Diese Datei wird von
Bin einigen „Function Panels“ benötigt.
rspsam.lib \ Import-Bibliothek
Bin
rspsam.h \ Header-Datei zum Treiber
Include
Zum Betrieb des Treibers sind die IVI- und VISA-Bibliotheken von National Instruments
notwendig.
7.2 Soft-Panel
Siehe hierzu auch Bild 7-1.
Für das Modul R&S TS-PSAM steht ein Soft-Panel zur Verfügung. Das Soft-Panel
setzt auf den LabWindows CVI Treiber auf. Das Soft-Panel ermöglicht die interaktive
Bedienung des Messmoduls. Die Ausgabe der Messwerte erfolgt digital oder grafisch
(Multipoint-Messungen).
Bedienhandbuch 1142.9878.11 ─ 12 28R&S®TS-PSAM Software
Programmierbeispiele
Bild 7-1: Soft-Panel R&S TS-PSAM
7.3 Programmierbeispiele
7.3.1 Programmierung mit Gerätetreiber
Dieses Beispiel zeigt die Verwendung der Komponenten DCS und MU. Zusätzlich wird
in einem zweiten Testfall die Anwendung der Widerstandsmessfunktion mit den DMM
Kanälen gezeigt. In diesem Beispiel ist das Messobjekt mit dem Frontstecker des
Moduls TS-PSAM verbunden. Die Bus-Koppel-Relais werden nicht geschlossen.
/* Example using driver functions */
#include
#include
#include "rspsam.h"
/* adapt the resource descriptor to your test system! */
static char resDesc[] = "PXI6::10::INSTR";
static ViStatus sta;
static ViSession vi;
/* prototypes */
static void chk ( char * funcName );
Bedienhandbuch 1142.9878.11 ─ 12 29R&S®TS-PSAM Software
Programmierbeispiele
static void runMuTest ( void );
static void runDmmTest ( void );
/* FUNCTION *****************************************************************/
/* loads the driver and runs the test
*****************************************************************************/
int main(int argc, char *argv[])
{
printf("Use of driver functions\n\n");
/* open a session to the device driver */
sta = rspsam_InitWithOptions(resDesc, VI_TRUE, VI_TRUE, "Simulate=0", & vi);
/* check return value */
chk ("rspsam_InitWithOptions");
if (VI_SUCCESS == sta)
{
runMuTest();
runDmmTest();
/* close the driver */
sta = rspsam_close(vi);
chk ("rspsam_close");
}
printf("\nPress 'Enter' to terminate\n");
getchar();
return 0;
}
/* FUNCTION *****************************************************************/
/* checks the return status of a driver call
*****************************************************************************/
static void chk ( char * funcName )
{
if ( sta != VI_SUCCESS )
{
char errorMessage[256];
rspsam_error_message(vi, sta, errorMessage);
printf ("%s returned 0x%08X; %s\n", funcName, sta, errorMessage);
}
}
/* FUNCTION *****************************************************************/
/* configures a test using MU and DCS separately
*****************************************************************************/
Bedienhandbuch 1142.9878.11 ─ 12 30R&S®TS-PSAM Software
Programmierbeispiele
static void runMuTest ( void )
{
ViReal64 reading;
/* configure DCS earth tied */
sta = rspsam_cnx_Gnd(vi, RSPSAM_VAL_INSTRLINE_DCS_LO,
RSPSAM_VAL_RELAY_CLOSED);
chk ("rspsam_cnx_Gnd");
/* connect DCS to local analog bus */
sta = rspsam_Connect(vi, "DCS_HI","ABa1");
chk ("rspsam_Connect");
sta = rspsam_Connect(vi, "DCS_LO","ABd1");
chk ("rspsam_Connect");
/* connect MU to local analog bus */
sta = rspsam_Connect(vi, "MU_HI","ABb1");
chk ("rspsam_Connect");
sta = rspsam_Connect(vi, "MU_LO","ABc1");
chk ("rspsam_Connect");
/* configure DC supply */
sta = rspsam_dcs_ConfigureCurrentLimit(vi, 0.010);
chk ("rspsam_dcs_ConfigureCurrentLimit");
sta = rspsam_dcs_ConfigureVoltageLevel(vi, 1.1);
chk ("rspsam_dcs_ConfigureVoltageLevel");
/* select 5 V mesurement range */
sta = rspsam_ConfigureMeasurement(vi, RSPSAM_VAL_DC_VOLTS, 5.0, 0.001);
chk ("rspsam_ConfigureMeasurement");
/* switch on DC supply */
sta = rspsam_dcs_ConfigureOutputEnabled(vi, VI_TRUE);
chk ("rspsam_dcs_ConfigureOutputEnabled");
/* wait until configurations have settled; perform measurement */
sta = rspsam_Read(vi, 5000, & reading);
chk ("rspsam_Read");
/* switch off DC supply */
sta = rspsam_dcs_ConfigureOutputEnabled(vi, VI_FALSE);
chk ("rspsam_dcs_ConfigureOutputEnabled");
/* disconnect components from local analog bus */
sta = rspsam_DisconnectAll(vi);
chk ("rspsam_DisconnectAll");
Bedienhandbuch 1142.9878.11 ─ 12 31R&S®TS-PSAM Software
Programmierbeispiele
/* configure DCS earth free again; default state */
sta = rspsam_cnx_Gnd(vi, RSPSAM_VAL_INSTRLINE_DCS_LO,
RSPSAM_VAL_RELAY_OPEN);
chk ("rspsam_cnx_Gnd");
/* report the result */
if (VI_SUCCESS == sta)
{
printf("Reading: %.3f V\n", reading);
}
}
/* FUNCTION *****************************************************************/
/* configures a test using the DMM for a 4 wire resistor measurement
*****************************************************************************/
static void runDmmTest ( void )
{
ViReal64 reading;
/* select function and range */
sta = rspsam_ConfigureMeasurement(vi, RSPSAM_VAL_4_WIRE_RES, 1000.0, 0.001);
chk ("rspsam_ConfigureMeasurement");
/* configure DMM earth tied */
sta = rspsam_ConfigureGround (vi, VI_TRUE);
chk ("rspsam_ConfigureGround");
/* connect DMM to local analog bus */
sta = rspsam_Connect(vi, "DMM_HI","ABa1");
chk ("rspsam_Connect");
sta = rspsam_Connect(vi, "DMM_SHI","ABb1");
chk ("rspsam_Connect");
sta = rspsam_Connect(vi, "DMM_LO","ABc1");
chk ("rspsam_Connect");
sta = rspsam_Connect(vi, "DMM_SLO","ABd1");
chk ("rspsam_Connect");
/* wait until configurations have settled; perform measurement */
sta = rspsam_Read(vi, 5000, & reading);
chk ("rspsam_Read");
/* disconnect components from local analog bus */
sta = rspsam_DisconnectAll(vi);
chk ("rspsam_DisconnectAll");
Bedienhandbuch 1142.9878.11 ─ 12 32R&S®TS-PSAM Software
Programmierbeispiele
/* configure DMM earth free again; default state */
sta = rspsam_ConfigureGround(vi, VI_FALSE);
chk ("rspsam_ConfigureGround");
/* select default function and range */
sta = rspsam_ConfigureMeasurement(vi, RSPSAM_VAL_DC_VOLTS, 100.0, 0.001);
chk ("rspsam_ConfigureMeasurement");
/* report the result */
if (VI_SUCCESS == sta)
{
printf("Reading: %.1f Ohm\n", reading);
}
}
7.3.2 Programmierung mit GTSL Bibliotheken
Dieses Beispiel zeigt die Verwendung der Komponenten DCS und MU mit den GTSL
Bibliotheken „Route“, „Dmm“ und „DCPWR“. Im ersten Testfall werden die Einzelkom-
ponenten betrieben. Zusätzlich wird in einem zweiten Test die Anwendung der Wider-
standsmessfunktion mit den DMM Kanälen gezeigt. In diesem Beispiel ist das Messob-
jekt mit dem Frontstecker eines TS-PMB Matrixmoduls verbunden. Die Matrix- und
Bus-Koppel-Relais auf den Modulen TS-PSAM und TS-PMB werden von der Signal
Routing Library automatisch bedient.
/* Programming example with GTSL libraries
The following configuration files are used in this example:
physical.ini
------------
[device->PSAM]
Description = "TS-PSAM Module in Frame 1 Slot 8"
Type = PSAM
ResourceDesc = PXI6::10::INSTR
Frame = 1
Slot = 8
DriverDll = rspsam.dll
DriverPrefix = rspsam
DriverOption = "Simulate=0,RangeCheck=1"
RioType = PDC
[device->PMB_6]
Description = "TS-PMB Module in Frame 1 Slot 6"
Type = PMB
ResourceDesc = CAN0::0::1::6
Bedienhandbuch 1142.9878.11 ─ 12 33R&S®TS-PSAM Software
Programmierbeispiele
Frame = 1
Slot = 6
DriverDll = rspmb.dll
DriverPrefix = rspmb
DriverOption = "Simulate=0,RangeCheck=1"
RioType = PCAL2
SFTDll = sftmpmb.dll
SFTPrefix = SFTMPMB
; Analog bus pseudo-device, used by ROUTE
[device->ABUS]
Type = AB
sampleApp.ini
-------------
[ResourceManager]
; general trace settings (normally off)
Trace = 0
TraceFile = ResmgrTrace.txt
[LogicalNames]
PsamTest = bench->rspsamTest
[bench->rspsamTest]
Description = test bench
Simulation = 0
Trace = 0
SignalRoutingDisplay = 0
DCPwrSupply = device->PSAM
DigitalMultimeter = device->PSAM
SwitchDevice1 = device->PSAM
SwitchDevice2 = device->PMB_6
AnalogBus = device->ABUS
DCPwrChannelTable = io_channel->dcsupplies
AppChannelTable = io_channel->test
[io_channel->dcsupplies]
MainPower = PSAM!DCS_HI
[io_channel->test]
;UUT connected to TS-PMB
UUT_VCC = PMB_6!P1
UUT_R1.1 = PMB_6!P2
UUT_R1.2 = PMB_6!P3
UUT_GND = PMB_6!P4
; DMM channel names
HI = PSAM!DMM_HI
LO = PSAM!DMM_LO
SHI = PSAM!DMM_SHI
Bedienhandbuch 1142.9878.11 ─ 12 34R&S®TS-PSAM Software
Programmierbeispiele
SLO = PSAM!DMM_SLO
; PSAM components channel names
MU_HI = PSAM!MU_HI
MU_LO = PSAM!MU_LO
DCS_HI = PSAM!DCS_HI
DCS_LO = PSAM!DCS_LO
DCS_SHI = PSAM!DCS_SHI
DCS_SLO = PSAM!DCS_SLO
*/
#include
#include "resmgr.h"
#include "route.h"
#include "dmm.h"
#include "dcpwr.h"
static short errorOccurred;
static long errorCode;
static char errorMessage[GTSL_ERROR_BUFFER_SIZE];
static long residRoute = RESMGR_INVALID_ID;
static long residDmm = RESMGR_INVALID_ID;
static long residDcpwr = RESMGR_INVALID_ID;
static char benchName[] = "bench->rspsamTest";
static char supplyName[] = "MainPower";
/* prototypes */
static void cs ( char * funcName );
static void runDcsTest ( void );
static void runDmmTest ( void );
/* FUNCTION ****************************************************************/
/* loads the libraries and runs the test
****************************************************************************/
int main (int argc, char *argv[])
{
printf("Example using GTSL libraries\n\n");
/* setup libraries */
RESMGR_Setup (0, "physical.ini", "sampleApp.ini",
&errorOccurred, &errorCode, errorMessage);
cs("RESMGR_Setup");
if ( ! errorOccurred )
{
ROUTE_Setup (0, benchName, &residRoute,
&errorOccurred, &errorCode, errorMessage);
cs("ROUTE_Setup");
}
Bedienhandbuch 1142.9878.11 ─ 12 35R&S®TS-PSAM Software
Programmierbeispiele
if ( ! errorOccurred )
{
DCPWR_Setup (0, benchName, &residDcpwr,
&errorOccurred, &errorCode, errorMessage);
cs("DCPWR_Setup");
}
if ( ! errorOccurred )
{
DMM_Setup (0, benchName, &residDmm,
&errorOccurred, &errorCode, errorMessage);
cs("DMM_Setup");
}
if ( ! errorOccurred )
{
runDcsTest ( );
runDmmTest ( );
}
/* cleanup libraries */
if (residDmm != RESMGR_INVALID_ID)
{
DMM_Cleanup (0, residDmm, &errorOccurred, &errorCode, errorMessage);
cs("DMM_Cleanup");
}
if (residDcpwr != RESMGR_INVALID_ID)
{
DCPWR_Cleanup (0, residDcpwr, &errorOccurred, &errorCode, errorMessage);
cs("DCPWR_Cleanup");
}
if (residRoute != RESMGR_INVALID_ID)
{
ROUTE_Cleanup (0, residRoute, &errorOccurred, &errorCode, errorMessage);
cs("ROUTE_Cleanup");
}
RESMGR_Cleanup ( 0, &errorOccurred, &errorCode, errorMessage);
cs("RESMGR_Cleanup");
printf("\nPress 'Enter' to terminate\n");
getchar();
return 0;
}
/* FUNCTION ****************************************************************/
/* checks the return status of a library call
Bedienhandbuch 1142.9878.11 ─ 12 36R&S®TS-PSAM Software
Programmierbeispiele
****************************************************************************/
static void cs ( char * funcName )
{
if ( errorOccurred )
{
printf ("%s returned 0x%08X\n%s\n\n", funcName, errorCode, errorMessage);
}
}
/* FUNCTION ****************************************************************/
/* use of TS-PSAM components DCS and MU separately
****************************************************************************/
static void runDcsTest ( void )
{
ViInt32 resultCount = 0;
ViReal64 result = 0.0;
/* configure voltage measurement */
DMM_Conf_Measurement (0, residDmm, "DC_VOLTS", 5.0,
"AUTO_RANGE_OFF", 1e-3,
&errorOccurred, &errorCode, errorMessage);
cs("DMM_Conf_Measurement");
/* DCS should be earth tied in this test */
DCPWR_Conf_Ground_Relay (0, residDcpwr, supplyName, 1,
&errorOccurred, &errorCode, errorMessage);
cs("DCPWR_Conf_Ground_Relay");
/* connect power supply */
ROUTE_Execute (0, residRoute, "DCS_HI > UUT_VCC, DCS_LO > UUT_GND",
&errorOccurred, &errorCode, errorMessage);
cs("ROUTE_Execute");
/* connect measurement unit of TS-PSAM */
ROUTE_Execute (0, residRoute, "MU_HI > UUT_R1.1, MU_LO > UUT_R1.2",
&errorOccurred, &errorCode, errorMessage);
cs("ROUTE_Execute");
/* configure power supply */
DCPWR_Conf_Current_Limit (0, residDcpwr, supplyName,
DCPWR_VAL_REGULATE, 0.01,
&errorOccurred, &errorCode, errorMessage);
cs("DCPWR_Conf_Current_Limit");
DCPWR_Conf_Voltage_Level (0, residDcpwr, supplyName, 1.1,
&errorOccurred, &errorCode, errorMessage);
cs("DCPWR_Conf_Voltage_Level");
/* switch on power supply */
DCPWR_Conf_Output_Enabled (0, residDcpwr, supplyName, 1,
Bedienhandbuch 1142.9878.11 ─ 12 37R&S®TS-PSAM Software
Programmierbeispiele
&errorOccurred, &errorCode, errorMessage);
cs("DCPWR_Conf_Output_Enabled");
/* read voltage */
DMM_Read (0, residDmm, 0.1, 1, &result, & resultCount,
&errorOccurred, &errorCode, errorMessage);
cs("DMM_Read");
/* report result */
printf("Result: %.3f V\n", result);
/* switch off power supply */
DCPWR_Conf_Output_Enabled (0, residDcpwr, supplyName, 0,
&errorOccurred, &errorCode, errorMessage);
cs("DCPWR_Conf_Output_Enabled");
/* disconnect all */
ROUTE_Execute (0, residRoute, "||",
&errorOccurred, &errorCode, errorMessage);
cs("ROUTE_Execute");
/* configure DCS earth free again; default */
DCPWR_Conf_Ground_Relay (0, residDcpwr, supplyName, 0,
&errorOccurred, &errorCode, errorMessage);
cs("DCPWR_Conf_Ground_Relay");
}
/* FUNCTION ****************************************************************/
/* use of TS-PSAM for resistance measurement
****************************************************************************/
static void runDmmTest ( void )
{
ViInt32 resultCount = 0;
ViReal64 result = 0.0;
/* configure 4-wire resistance measurement */
DMM_Conf_Measurement (0, residDmm, "4_WIRE_RES", 1000.0,
"AUTO_RANGE_OFF", 1e-3,
&errorOccurred, &errorCode, errorMessage);
cs("DMM_Conf_Measurement");
/* DMM should be earth tied in this test */
DMM_Conf_Ground_Relay (0, residDmm, 1,
&errorOccurred, &errorCode, errorMessage);
cs("DMM_Conf_Ground_Relay");
/* connect DMM to UUT */
ROUTE_Execute (0, residRoute, "HI > UUT_VCC, LO > UUT_GND,"
"SHI > UUT_R1.1, SLO > UUT_R1.2, ?#",
Bedienhandbuch 1142.9878.11 ─ 12 38R&S®TS-PSAM Software
Programmierbeispiele
&errorOccurred, &errorCode, errorMessage);
cs("ROUTE_Execute");
/* read voltage */
DMM_Read (0, residDmm, 0.1, 1, &result, & resultCount,
&errorOccurred, &errorCode, errorMessage);
cs("DMM_Read");
/* report result */
printf("Result: %.1f Ohm\n", result);
/* disconnect all */
ROUTE_Execute (0, residRoute, "||",
&errorOccurred, &errorCode, errorMessage);
cs("ROUTE_Execute");
/* configure DMM earth free again; default */
DMM_Conf_Ground_Relay (0, residDmm, 0,
&errorOccurred, &errorCode, errorMessage);
cs("DCPWR_Conf_Ground_Relay");
/* select default measurement function */
DMM_Conf_Measurement (0, residDmm, "DC_VOLTS", 200.0,
"AUTO_RANGE_OFF", 1e-3,
&errorOccurred, &errorCode, errorMessage);
cs("DMM_Conf_Measurement");
}
Bedienhandbuch 1142.9878.11 ─ 12 39R&S®TS-PSAM Selbsttest
Einschalttest
8 Selbsttest
Das R&S TS-PSAM besitzt integrierte Selbsttestfähigkeit. Folgende Tests sind imple-
mentiert:
● LED-Test
● Einschalttest
● TSVP-Selbsttest
8.1 LED-Test
Nach dem Einschalten leuchten alle drei LEDs für ca. eine Sekunde auf. Dies signali-
siert, dass die dafür benötigten Versorgungsspannungen anliegen und alle LEDs in
Ordnung sind. Folgende Aussagen können über die verschiedenen Anzeigezustände
gemacht werden:
Tabelle 8-1: Aussagen zum LED-Test
LED Beschreibung
eine einzelne LED Hardwareproblem auf dem Modul
leuchtet nicht LED defekt
alle LEDs leuchten +5 V-Versorgungsspannung fehlt
nicht
Bei Diagnosen die auf eine fehlerhafte Versorgungsspannung hinweisen sind die LEDs
des zugehörigen Rear-I/O Moduls R&S TS-PDC einer Sichtkontrolle zu unterziehen.
Bestätigt sich der Ausfall einer Versorgungsspannung, so ist das Modul R&S TS-PDC
auszutauschen.
8.2 Einschalttest
Parallel zum LED-Test verläut der Einschalttest. Folgende Aussagen können über die
verschiedenen Anzeigezustände der roten und grünen LED nach dem LED-Test
gemacht werden:
Tabelle 8-2: Aussagen zum Einschalttest
LED Beschreibung
grüne LED an alle Versorgungsspannungen vorhanden
grüne LED aus mindestens eine Versorgungsspannung von Modul
R&S TS-PSAM oder Modul R&S TS-PDC fehlt
rote LED aus es liegt kein Fehler vor
rote LED an Laden des FPGA/µP ist fehlgeschlagen
Bedienhandbuch 1142.9878.11 ─ 12 40R&S®TS-PSAM Selbsttest
TSVP-Selbsttest
Bei Diagnosen die auf eine fehlerhafte Versorgungsspannung hinweisen sind die LEDs
des zugehörigen Rear-I/O Moduls R&S TS-PDC einer Sichtkontrolle zu unterziehen.
Bestätigt sich der Ausfall einer Versorgungsspannung, so ist das Modul R&S TS-PDC
auszutauschen.
8.3 TSVP-Selbsttest
Im Rahmen des TSVP-Selbsttests wird ein tiefgehender Test des Moduls durchgeführt
und ein ausführliches Protokoll generiert. Dies geschieht über die “Selbsttest Support
Library“.
Das Modul R&S TS-PSAM wird als Messeinheit für den Selbsttest von R&S-Modulen
im TSVP verwendet. Durch Messungen über den Analogbus wird die Funktion der
Module im System sichergestellt.
Informationen zum Starten des Selbsttests und zur Reihenfolge der notwendigen
Arbeitsschritte sowie eine detaillierte Beschreibungder geprüften Parameter und
Abläufe befindet sich im Service Manual R&S CompactTSVP / R&S PowerTSVP.
Bedienhandbuch 1142.9878.11 ─ 12 41Sie können auch lesen