Vision for Your Automation - Interempresas
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

3D-Bildverarbeitungssysteme Vision for Your Automation

Vision for Your Automation
Erfahrungen und Innovationen…
2003 Seit fast 30 Jahren entwickelt und fertigt VISIO NERF
3D-Roboter führung Bildverarbeitungssysteme für die Qualitätskontrolle
zum Entgraten
von großen Rohteilen und Roboterführung mithilfe von Kameras in der
industriellen Produktion.
2006 Mit mehreren tausend installierten Systemen weltweit
3D-Roboter führung zur in sämtlichen Branchen der Industrie verfügt VISIO
Entnahme von Kurbelwellen NERF über ein einzigartiges Know-how und gilt heute
aus loser Schüttung
(Bin Picking) als einer der Marktführer im Bereich der industriellen
Bildverarbeitung.
2009 Dank der innovativen Eigenschaften unserer
Komplette Analysesoftware 3D-Bildverarbeitungssysteme und Softwarelösungen
für 3D-Punktewolken inkl. gehört VISIO NERF zu den größten Anbietern
einer Anlernfunktion mit
Hilfe der CAD-Daten von auf dem Markt von Lösungen für die industrielle
den Bauteilen Bildverarbeitung und konnte die wachsenden
Anforderungen unserer Kunden bisher immer wieder
2012 aufs neue erfüllen.
3D-Roboter führung zur
Entnahme von Kettenglie-
dern aus loser Schüttung
(für Caterpillar) Präzise und an Über die Grenzen der
der richtigen Stelle Bildverarbeitung hinaus...
2014
Einführung der Produkt-
baureihe cirrus 3D
In den vergangenen 15 Jahren hat VISIO NERF eine
Vielzahl von 3D-Bildverarbeitungssystemen für die
Das Angebot von VISIO NERF umfasst äußerst
effiziente Werkzeuge für die Lokalisierung von Inhalt
Qualitätskontrolle und Roboterführung hergestellt. Bauteilen und produktionsnahe Qualitätskontrolle,
2015 Auf dieser Grundlage haben wir unsere neusten
3D-Sensoren für die Baureihe cirrus 3D
entwickelt.
die sich einfach integrieren lassen. cirrus3D________________________ 4-7
3D-Roboter furhrung zur Wir bieten Ihnen eine robuste Lösung, die auf Ihre
Montage von Windschutz- Mit der Baureihe cirrus 3D
bieten wir unseren Kunden cirrus3D Conveyor________________ 8-9
scheiben mit cirrus 3D Anforderungen und Prozessumgebung abgestimmt
eine betriebsbereite Komplettlösung, 3D-Sensor inkl.
ist, und sich an schwankende Umgebungseinflüsse,
hochleisungs IPC & Software in einem Gehäuse! Sensor Manager______________ 10-11
2016 Mit unserer Lösung in der 3D-Bildverarbeitung
sowie verschiedenen Abmessungen und Formen der
Werkstücke anpassen kann. eyesberg3D___________________ 12-13
Renault führ t cirrus3D können Sie Ihre Projekte wesentlich einfacher und
und eyesberg 3D in der effizienter realisieren als mit herkömmlichen 2D oder Unsere robusten 3D-Bildverarbeitungssysteme
Produktion ein 3D-Lösungen. Wir unterstützen Sie gerne bei der Anwendungen
wurden speziell für industrielle Arbeitsumgebungen
Planung und Umsetzung Ihrer Projekte.
2017
entwickelt, in denen sie Staub oder Spritzern durch
Lokalisierung _________________ 14-15
Zögern Sie nicht länger! Flüssigkeit von angrenzenden Maschinen ausgesetzt
Überprüfung sein können.
von Gussbauteilen Überprüfung__________________ 16-17
2018 Roboterführung _______________ 18-19
Einführung der
Produktbaureihe
Bin Picking____________________ 20-21
cirrus 3D Conveyor
Identifikation __________________ 22-23
Vision for Your Automation
Autonomer Sensor
Abgedichtete Industriestecker
„Plug & Work“
Der neue 3D-Sensor von VISIO NERF vereinfacht die Inte- (Stromversorgung und Ein-/Ausgänge,
digitaler Videoausgang, Ethernet RJ45, USB)
gration ihrer industriellen Prozesse. cirrus 3D wurde speziell
für das Herzstück Ihrer Anlage entwickelt, in das er ohne
spezifische Anpassung integrier t werden kann.
Leistungsstarkes
Als festinstallier te oder mobile Komponente, mit oder Kühlsystem
Ultraschneller Scan:
ohne Bildverarbeitungssoftware eyesberg 3D * (patentier te min. 0,2 Sekunden
Technologie), ermöglicht cirrus 3D die Nutzung von Bildver-
arbeitungs- und Robotikanwendungen mit einzigar tiger
Effizienz und sehr hoher Qualität.
Die Sensoren wurden speziell für die Anwendung in der
Industrie entwickelt und sind daher unempfindlich gegenüber
4 5
den Umgebungsbedingungen wie Staub und wechselnden
Lichtverhältnissen, wodurch eine einzigartige Zuverlässigkeit
und Stabilität Ihrer Anlagen gewährleistet wird (Schutzklasse IP Integrierter, leistungsstarker
Prozessor für die Berechnung
65).
der 3D-Punkte
Zusammenbau, Prüfung, Identifizierung oder Lokalisierung von
Einzelbauteilen oder Schüttgut gehören zu den industriellen Hohe
Anwendungen, bei denen Ihnen die Produkte der Baureihe Schutzklasse (IP 65)
cirrus 3D einen ausgezeichneten Return on Investment
garantieren. Blaue LED
4MP Kamera
KOMPONENTEN „MADE BY“ VISIO NERF
Abgedichtete Industrieanschlüsse Leistungsfähiger Projektor mit blauer LED Hochleistungskühlung Integrier ter, leistungsfähiger Prozessor CMOS-Sensor und speziell konzipier tes
für die Berechnung der 3D-Punkte Objektiv für eine hohe Auflösung
* eyesberg3D: intelligente Lokalisierung durch CAD-Modelle
Vision for Your Automation
cirrus 3D im Überblick Vorteile Einsatz mehrerer Sensoren
•H
ochwertige Sensor-Baureihe für industrielle • Schnelle Rentabilität Wir haben eine Konfiguration entwickelt, in der mehrere
Anwendungen • H ohe Unempfindlichkeit gegenüber dem Sensoren miteinander verbunden werden können. In diesem
• „ Plug & Work“-Produkte, im Werk kalibriert und Umgebungslicht Fall wird die „Intelligenz“ in einen einzigen Sensor, dem so
autonom (integrierter Rechner) • B egrenzung der Sicherheitsproblematik genannten „Master“, integriert. Eine einzige Softwarelizenz MASTER SLAVE 1 SLAVE 2 (…9)
•H
ochauflösende Bilder (bewährte LED-Technologie anstelle eines Lasers) reicht aus, um bis zu 9 „Slave“-Sensoren zu steuern.
•U
ltraschneller Scan: 0,2 Sekunden für 1 Million • E infache Integration in robotisierte oder nicht
Ethernet
3D-Punkte robotisierte industrielle Prozesse
• Vergleich einer Punktewolke mit einer CAD-Datei • E infache Anwendung der Kommunikationsprotokolle Digital Digital Digital
I/O I/O I/O
(Option) ( TCP/IP) Display
• 3 D-Bildverarbeitungssystem für Anwendungen mit • E infache Parametrierung der gesamten
oder ohne Roboter („Griff in die Kiste“, Lokalisierung, 3D-Bildverarbeitungsapplikation eyesberg 3D (Option)
USB 24V Netzteil 24V Netzteil 24V Netzteil
Identifizierung und Prüfung...) • Vernetzbar, parametrierbar und programmierbar
•B
eleuchtung mit strukturiertem Licht (blaue LED). über eine direkte Schnittstelle für Bildschirm und Maus 90…260 V AC 90…260 V AC 90…260 V AC
• Wasserkühlung möglich (Option)
Konfiguration 2 cirrus (Master/Slave)
6 Sensoren - 6 Arbeitsvolumen
6 7
cirrus3D Modell cirrus 150 cirrus 300 cirrus 600 cirrus 800 cirrus 1200 cirrus 1600 Gemeinsame Merkmale aller Modelle
Arbeitsvolumen in mm (L x B x H) 150 x 150 x 60 300 x 300 x 150 600 x 500 x 300 800 x 600 x 500 1200 x 1000 x 1000 1600 x 1200 x 1200 Scangeschwindigkeit min. 0,2 Sek. Material des Gehäuses Eloxiertes Aluminium
Stromversorgung und Ein-/
min. Arbeitsabstand in mm 300 450 950 1250 1900 2500 Anzahl 3D-Punkte Bis zu 4 Millionen je Scan Anschlüsse
Ausgänge, VGA, Ethernet RJ45, USB
Auflösung* des 3D-Bilds in mm (Z) 0,1 0,2 0,45 0,9 1,5 1,8 Informationsverarbeitungssoft-
eyesberg3D Stromversorgung 24 V DC 8 A max.
ware (Option)
Auflösung der CMOS-Sensoren 4 Mp 4 Mp 4 Mp 4 Mp 4 Mp 4 Mp
Kalibrierung Werksseitig kalibriert Lichtquelle LED
Abm. des Sensors in mm (L x B x H) 312 x 100 x 210 312 x 100 x 210 412 x 100 x 210 412 x 100 x 210 612 x 100 x 210 812 x 100 x 210 Kommunikationsschnittstelle Ethernet Betriebstemperatur 0°C…50°C
Gewicht des Sensors (kg) 6 6 7 7 8 10 Digitale Ein-/Ausgänge 24 V DC 4 Eingänge 3 Ausgänge
* Für einen einzigen 3D-Punkt ohne Mittelung und Interpolation in größter Entfernung vom Sensor. Die Bauteile-Lokalisierung ist
10-mal besser als die Auflösung, hängt jedoch von den Abweichungen zwischen der CAD-Datei und dem reellen Bauteil ab.
cirrus 150 cirrus 300 cirrus 600 cirrus 800 cirrus 1200 cirrus 1600
300 mm
2.500 mm
450 mm
1.900 mm
950 mm
1.250 mm
max. 150 x 150 x 60 mm
max. 300 x 300 x 150 mm
max. 600 x 500 x 300 mm
max. 800 x 600 x 500 mm
max. 1.200 x 1.000 x 1.000 mm max. 1.600 x 1.200 x 1.200 mm
Diese Angaben können ohne Vorankündigung geändert werden.
Vision for Your Automation
conveyor
Vorteile Eingenschaften des Sensors
Bauteilver folgung und - Aufnahme auf Förderbändern
• Schnell • A nschluss: Stromversorgung / Bildschirm / Ethernet
• E infache Kalibrierung des Systems • P arametrierung: intuitive, benutzerfreundliche
in wenigen Minuten Bedienoberfläche für die Einstellung des
Erfassungsbereiches
• Präzision: bis zu 0,5 mm
• A nzeige der 3D-Punktewolke
• A rbeitsbreite / Arbeitsbereich • K alibrierung in wenigen Minuten
bis zu 1600 mm
• E ingang für 24V-Inkremental-Encoder.
• K ompatibel mit allen gängigen •D
ie Auflösung des Encoders ist höher als die Auflösung
Robotermarken der 3D-Linienaufnahmen.
• Hohe Flexibilität des Systems •A
utomatische Bestimmung der Encoderauflösung in der
Kalibrierungsphase. Außerdem ermöglicht die Kalibrierung
• Wirtschaftliche All-in-One-Lösung
die Messung und exakte Ausrichtung des cirrus 3D
• Matte und glänzende Bauteile, Rohteile im Verhältnis zum Förderband.
8 9
• A utomatische Erkennung der Bauteile auf dem Förderband
• S enden eines Synchronisationssignals an den Roboter über
einen 24V-Ausgang sowie der Koordinaten des Bauteils
Reelle Szene über TCP/IP.
•D
as 24V-Signal simuliert die herkömmliche Detektionszelle,
die von Robotern für Verfolgungsaufgaben verwendet wird.
cirrus3D Conveyor cirrus3D Conveyor 500 cirrus3D Conveyor 1000 cirrus3D Conveyor 1500
Förderbandbreite 550 Förderbandbreite1050 Förderbandbreite 1500
Arbeitsvolumen (mm)
3D-Punktewolke max. Höhe der Bauteile 300 max. Höhe der Bauteile 400 max. Höhe der Bauteile 500
800 / über den Bauteilen 1500 / über den Bauteilen 2200 / über den Bauteilen
Arbeitsabstand (mm)
1100 max. / Förderband 1900 max. / Förderband 2700 max. / Förderband
Scangeschwindigkeit max. 3000 Linien mit 2048 3D-Punkten/Sekunde*
Auflösung 0.5 mm 1 mm 1 mm
Beleuchtung LASER Klasse 2M oder 3R
IP 65
Lokalisierung der Bauteile Abmessungen des Sensors
412 x 100 x 210 612 x 100 x 210 812 x 100 x 210
L x B x H (mm)
Gewicht des Sensors (kg) 7 8 10
Kompatibilität Roboter Alle gängigen Marken
*Übliche Geschwindigkeit: 200 parallele Profile mit je 2000 3D-Punkten/Sekunde für die volle Scanhöhe.
Weitere Modelle auf Anfrage erhältlich - Individuelle Anpassung möglich
Vision for Your Automation
SENSOR MANAGER
Benutzer freundliche, intuitive Bedienerober fläche Präzision und Qualität der 3D-Punkte, unabhängig von der Höhe
für Punktewolken von hoher Qualität. und Ausrichtung der Bauteile im Arbeitsvolumen.
Oberseite des Behälters
10 11
3D-Punktewolke Vergrößerung der
3D-Punktewolke
Reelles Bild
Hohe Dynamik des Sensors zur Digitalisierung von Arbeitsszenen Boden des Behälters
mit matten und glänzenden Bauteilen aus verschiedenen Materialien.
3D-Punktewolke Vergrößerung der
3D-Punktewolke
Reelles Beil Reelles Bild
3D-Punktewolke
Vision for Your Automation
5 Hauptanwendungen
3D-Bildverarbeitungssystem Unter der Bezeichnung eyesberg 3D bietet Ihnen Visio Nerf
eine Reihe von Lösungen an, die auf einer robusten und
zur Verarbeitung von Bauteilen
bewährten Technologie beruhen.
mit den unterschiedlichsten
Das Grundprinzip besteht darin, eine von einem 3D-Sensor
geometrischen Formen ohne erzeugte 3D-Punktewolke in Echtzeit mit einem CAD-Modell
spezifische Programmierung. des Bauteils zu vergleichen. Wie beim sichtbaren Bauteil
Lokalisierung
eines Eisbergs genügt ein kleiner Ausschnitt, um das Teil (S.14)
mithilfe der Software in der Arbeitsszene zu identifizieren
und zu lokalisieren.
Wir bieten unseren Kunden ein allgemeines, offenes
Programm, in das lediglich die CAD-Datei des Bauteils
importiert werden muss.
Mit dem Sensor cirrus 3D können verschiedene Module
(zum Beispiel Identifizierung/Führung, Identifizierung/
12 Prüfung) kombiniert werden, um so komplexe Aufgaben mit 13
Standardwerkzeugen zu bewältigen.
Unsere Lösungen haben sich seit vielen Jahren in zahlrei- Prüfung
chen Branchen (Luftfahrt, Automobilindustrie, Eisenbahn…) (S.16)
bewährt, wo sie eine effiziente Qualitätskontrolle (eyes-
berg 3D Überprüfung) gewährleisten und zur Produktivitätss-
teigerung beitragen.
Identifizierung
(S.22)
Roboterführung
(S.18)
Der Griff
in die Kiste
(S.20)
Vision for Your Automation
Lokalisierung Anwendungsbeispiele
Für eine kostengünstige Automatisierung
zur Bestückung einer Produktionslinie.
Vom realen zum virtuellen
Die reelle Arbeitsszene wird als 3D-Punktewolke
digitalisiert.
14 15
Reelles Rohteil
3D-CAD-Modell
Punktewolke
Vom virtuellen zum realen
Ein Vergleich der Punktewolke mit dem CAD-Modell ermöglicht
die Lokalisierung des Bauteils in der Arbeitsszene, sodass
zum Beispiel überprüft werden kann, ob es vom Greifer ohne
Kollisionen aufgenommen werden kann.
Der Roboter erhält in Echtzeit Informationen zur Position des
aufzunehmenden Bauteils.
Vision for Your Automation
Prüfung Anwendungsbeispiele
Für eine kostengünstige Kontrolle der Übereinstimmung
Ihrer Bauteile während der Produktion. Motor teile
Kurbelwelle
Vom realen zum virtuellen Reelles Beil
Die reelle Arbeitsszene wird als 3D-Punktewolke
digitalisiert.
3D-CAD-Modell
16 17
Punktewolke
Vom virtuellen zum realen
Getriebeteile
Die Messdaten des Bauteils werden analysiert und
ermöglichen eine umfassende Prüfung der Oberfläche.
Der Vergleich der Punktewolke mit dem CAD-Modell
ermöglicht eine Analyse der Oberfläche des Bauteils
sowie die Überprüfung weiterer Kriterien: Materialfehler,
Abmessungen, Planheit…
Die Produktionsanlage erhält in Echtzeit Informationen
Teile
zur Übereinstimmung des Bauteils, um seine optimale
des Bremssystems
Qualität zu gewährleisten.
Sandkern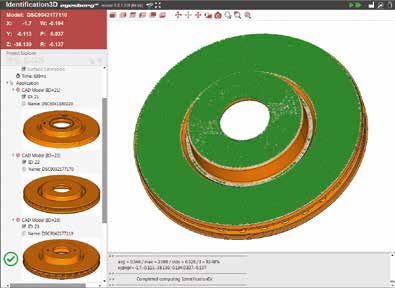
Vision for Your Automation
Roboterführung Anwendungsbeispiele
Für eine kostengünstige Automatisierung der Adjustage
oder Bearbeitung von mechanischen Bauteilen.
Vom realen zum virtuellen
Die reelle Arbeitsszene wird als 3D-Punktewolke
digitalisiert.
Reelle Szene
18 3D-CAD- 19
Modell
Punktewolke
Für die kostengünstige Automatisierung von Montagestraßen.
Innenteile Windschutzscheibe
für Fahrzeuge
Radmontage
Einbau einer
Windschutzscheibe
Vom virtuellen zum realen
Die Analyse der virtuellen Arbeitsszene ermöglicht eine Die Bearbeitungszelle erhält die Korrekturen der
Optimierung der Prozesse. Bewegungsbahnen, damit das Werkzeug der Oberfläche
des Bauteils optimal folgen kann.
Ein Vergleich der Punktewolke mit dem CAD-Modell des
Bauteils trägt dazu bei, Positionierungs und Formfehler
zu erkennen und auszugleichen.
Karosserieteile Struktur teile Fahrzeugräder
vom FahrzeugVision for Your Automation
Der Griff in die Kiste Anwendungsbeispiele
Für die kostengünstige Automatisierung der Beschickung einer
Produktionslinie mit Schüttgut oder vorsor tier ten Bauteilen.
Vom realen zum virtuellen
Die reelle Arbeitsszene wird als 3D-Punktewolke
digitalisiert.
Reelle Szene
20 21
Punktewolke 3D-CAD-Modell
Vom virtuellen zum realen Schmiedeteile mechanische
Dank einer Analyse der virtuellen Arbeitsszene kann das Bauteil Bauteile
gefunden werden, das am besten zum Greifen geeignet ist.
Ein Vergleich der Punktewolke mit dem CAD-Modell ermöglicht
die Auswahl eines geeigneten Bauteils, welches der Greifer
ohne Kollisionen aufnehmen kann.
Der Roboter erhält in Echtzeit Informationen zur Position des
aufzunehmenden Bauteils.
Nach diesem Prinzip wird der Behälter vollständig entleert. Steuerung der Bahnplanung
Elektromechanische
Kollisionsüberwachung Überwachung von Überlagerungen Sicherheitsbauteile BaugruppenVision for Your Automation
Identifizierung Anwendungsbeispiele
Für die kostengünstige Automatisierung der Bearbeitung
von Bauteilen in einem heterogenen Fluss.
Vom realen zum virtuellen
Die reelle Arbeitsszene wird als 3D-Punktewolke digitalisiert.
22 23
Reelles Beil Punktewolke 3D-CAD-Modell
Vom virtuellen zum realen
Dank einer Analyse der Arbeitsszene kann das aktuelle Bauteil
identifiziert werden.
Ein Vergleich der Punktewolke mit den CAD-Modellen der Datenbank
eyesberg 3D ermöglicht eine Identifizierung und Lokalisierung des
passenden Bauteils im Prozessfluss.
Lackieren
Gießen
Das System erhält in Echtzeit
Informationen über die Identifizierung
und Position des Bauteils,
welches der gewünschten Bearbeitung Tiefziehen
unterzogen werden kann.Unsere Systeme sind kompatibel mit
HR AL
ME
350
RU
ELTWEI FAH NG
HR AL
S
ME
350
RU
FAH NG
15
ER W
ER
S
MI
1
TE M
5
IN ST
T
Jahre
EN
A
IN ST
IT
3 D-B
LL A IO N
Jahre
EN
T
G
A DV
UN
A
3PD - B
LL A IO N E R A R B EIT
IL
T R ER
G
D V T N IT
UN
CIRD002-0220-DE
IL
ERARBE
Fotos: VisioNerf - CE Barré - ShutterStock© - Folotlia©
Diese Angaben können ohne Vorankündigung geändert werden
Industriestraße 9 - 40822 Mettmann - Germany
Tel.: +49 2104 234 85 90 - Fax: +49 2104 234 85 91
www.visionerf.comSie können auch lesen

















































