Bau einer Funksensoranlage zur Messung und Auswertung von Innenraumluft
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Frankfurt University of Applied Sciences
Fachbereich 2
Informatik und Ingenieurwissenschaften
Informatik – Mobile Anwendungen
Bau einer Funksensoranlage zur Messung
und Auswertung von Innenraumluft
Bachelor Thesis
von
Alexander Ochs
E-Mail: ochs@outlook.com
Matrikelnummer: 1054990
Studiengang
Informatik – Mobile Anwendungen (Bachelor of Science)
Erstbetreuer: Prof. Dr. Jens Liebehenschel
Zweitbetreuer: Prof. Dr. Robin Müller-Bady
Bearbeitungszeit: 05. Juni 2020 – 08. September 2020
Abgabedatum: 08. September 2020
Eidesstattliche Erklärung
Hiermit erkläre ich, dass ich die vorliegende Arbeit, selbstständig und ohne fremde
Hilfe verfasst und keine anderen als die angegebenen Hilfsmittel benutzt habe. Die
Stellen der Arbeit, die dem Wortlaut oder dem Sinn nach anderen Werken
entnommen wurden, sind in jedem Fall unter der Angabe der Quelle kenntlich
gemacht. Die Arbeit ist noch nicht veröffentlicht oder in anderer Form an
irgendeiner Stelle als Prüfungsleistung vorgelegt worden.
Die Anmeldung beim Prüfungsamt der Frankfurt University of Applied Sciences
für die Prüfung ist erfolgt.
Frankfurt am Main, 08. September 2020
Unterschrift: __________
(Alexander Ochs)
i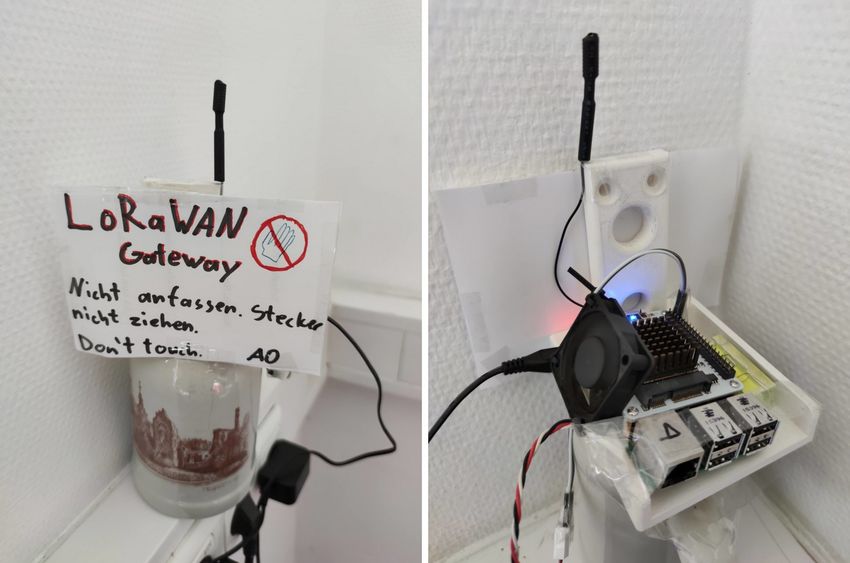
Danksagung
Ich möchte mich bei all denjenigen bedanken, die mich bei der Anfertigung dieser
Bachelorarbeit unterstützt haben.
Prof. Dr. Liebehenschel, der die Grundidee für diese Bachelorarbeit hatte und die
notwendigen Technik bereitstellen konnte.
David Merkl, der mit seiner Bachelor Thesis diese Arbeit inspiriert hat.
Der Firma ABK-Systeme Gesellschaft für Ausbildung, Beratung und
Kommunikationssysteme mbH, bei der ich meine Bachelorarbeit schreiben und die
verwendeten Sensoren aufhängen konnte.
ii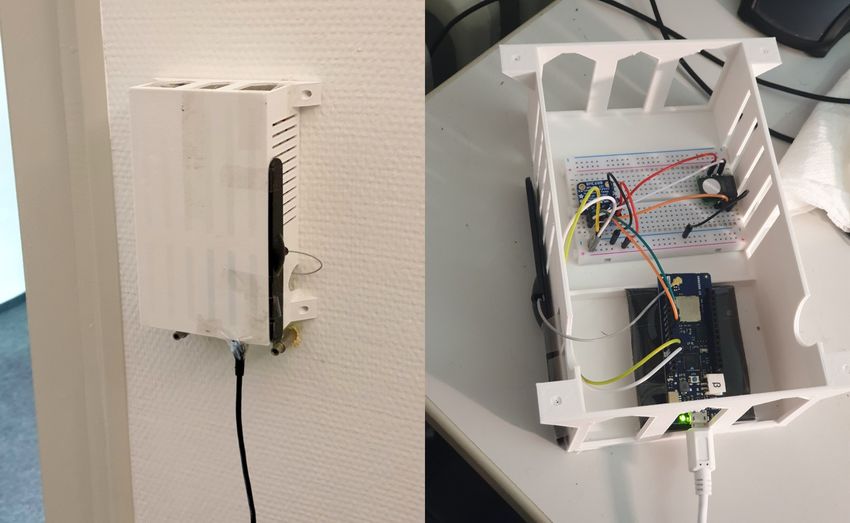
Zusammenfassung
Diese Arbeit befasst sich mit dem Aufbau, dem Betrieb und der Auswertung von
Innenraumluft mit dem Aspekt einer Datenübertragung über mehrere Kilometer.
Zunächst wird erläutert welche Bauteile dafür geeignet sind. Danach wird der
Aufbau der Hardware für die Messstationen und den Empfänger dargestellt.
Anschließend wird die notwendige Software und deren Implementierung gezeigt.
Letztlich gibt es eine Auswertung der gewonnen Messwerte.
iii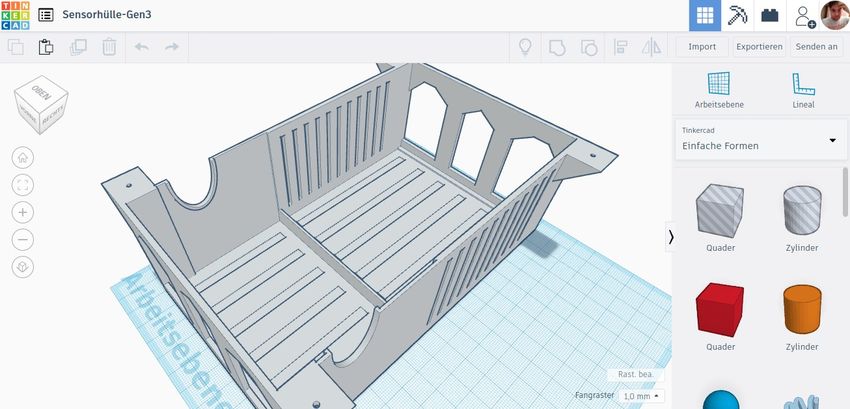
Inhaltsverzeichnis
Eidesstattliche Erklärung...........................................................................................i
Danksagung...............................................................................................................ii
Zusammenfassung.....................................................................................................iii
Inhaltsverzeichnis......................................................................................................iv
Abbildungsverzeichnis...............................................................................................vi
1 Einführung..............................................................................................................1
1.1 Motivation.......................................................................................................1
1.2 Planung............................................................................................................1
1.3 Ziel der Arbeit.................................................................................................2
2 Messwerte finden und Hardware auswählen...........................................................3
2.1 Festlegung der Messparameter........................................................................3
2.2 Aufstellung der groben Infrastruktur..............................................................4
2.3 Hardware finden..............................................................................................5
2.3.1 Auswahl der Messeinheit-Hardware.........................................................5
2.3.2 Auswahl der Sensoren...............................................................................6
2.3.3 Auswahl der Server-Hardware..................................................................6
2.4 Eingesetzte Entwicklungsumgebung und Programmiersprachen.....................7
3 Entwicklung der Messeinheiten...............................................................................8
3.1 Aufbau der Hardware......................................................................................8
3.1.1 Herstellung des Gehäuses.........................................................................8
3.1.2 Probleme bei der der Planungsumsetzung...............................................9
3.1.3 Finale Umsetzung...................................................................................11
3.2 Implementierung der Software.......................................................................13
3.2.1 Verwendete Bibliotheken........................................................................13
3.2.2 Programmierung des Arduinos...............................................................14
4 Entwicklung des Servers und Verwendung des „The Things Network“.................18
4.1 Das Gateway aufbauen und verbinden..........................................................18
4.2 Das „The Things Network“ einrichten............................................................19
5 Messdaten sammeln und auswerten......................................................................21
5.1 Transfer der Daten vom TTN auf den Server...............................................21
5.2 Messdaten visualisieren..................................................................................22
5.3 Standorte der Messstationen.........................................................................23
5.4 Vergleich der Messdaten mit der VDI-Richtlinie 6022-3...............................26
5.4.1 Ausgewählte Vorgaben und ihre Werte..................................................26
5.4.2 Einhaltung der Grenzwerte in ausgewählten Zeiträumen.......................27
6 Endbetrachtung....................................................................................................32
6.1 Zusammenfassung..........................................................................................32
6.2 Fazit...............................................................................................................32
iv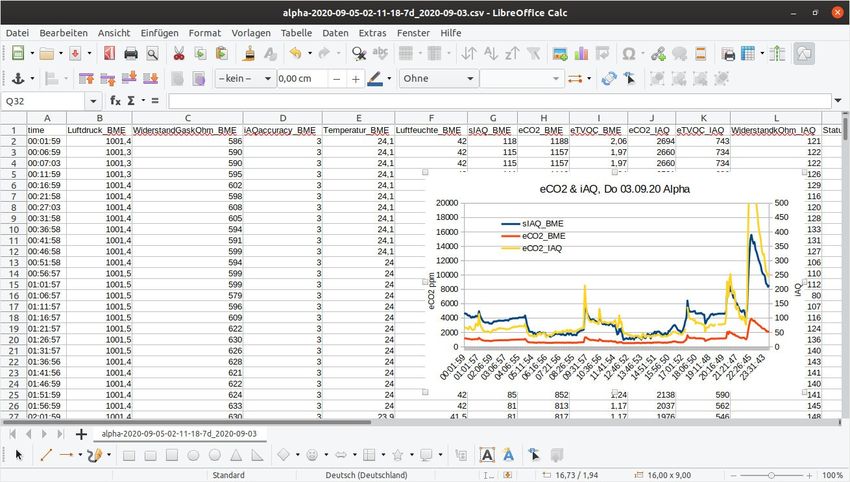
6.3 Ausblick.........................................................................................................32
Glossar.....................................................................................................................34
Quellen- und Literaturverzeichnis............................................................................36
CD............................................................................................................................38
Siehe Errata am Ende der Arbeit
v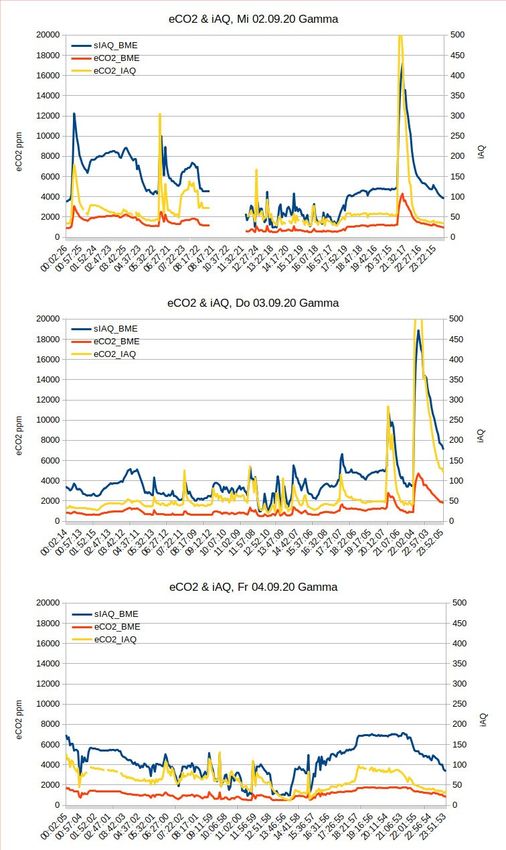
Abbildungsverzeichnis
Ein Arduino MKR WAN 1310...................................................................................5
Ein LoRa Gateway HAT von Pi Supply....................................................................7
Benutzeroberfläche von Tinkercad mit 3D Modell des Messeinheit-Gehäuses..........9
Schaltbild des ursprünglich Aufbaus........................................................................10
Versuchsaufbau mit 3 Sensoren, Relais und Step-Down-Converter.........................11
Fertiggestellte Messeinheit.......................................................................................12
Schaltbild des verwendeten Aufbaus........................................................................13
Arduino Software beim Hochladen des Programmcodes.........................................15
Verfügbare CayenneLPP Datentypen und deren Aufbau........................................16
Server bestehend aus Raspberry Pi und LoRaWAN Gateway................................18
Übersicht der Gateway-Statusseite im TTN............................................................19
Die Gateway-Statusseite des Raspberry Pi Servers.................................................20
Zuweisung der Messwert-Namen im Python Programm..........................................21
Ausschnitt Python Programm zum Download der Daten.......................................22
Visualisierung der Messdaten in LibreOffice Calc...................................................23
Umgebung der Messstationen..................................................................................25
Vorgabe der Schadstoffwerte....................................................................................26
Bosch iAQ Index......................................................................................................27
Ausgewählte eCO2 und iAQ Werte von Messstation Alpha....................................28
Ausgewählte eCO2 und iAQ Werte von Messstation Beta......................................30
Ausgewählte eCO2 und iAQ Werte von Messstation Gamma.................................31
vi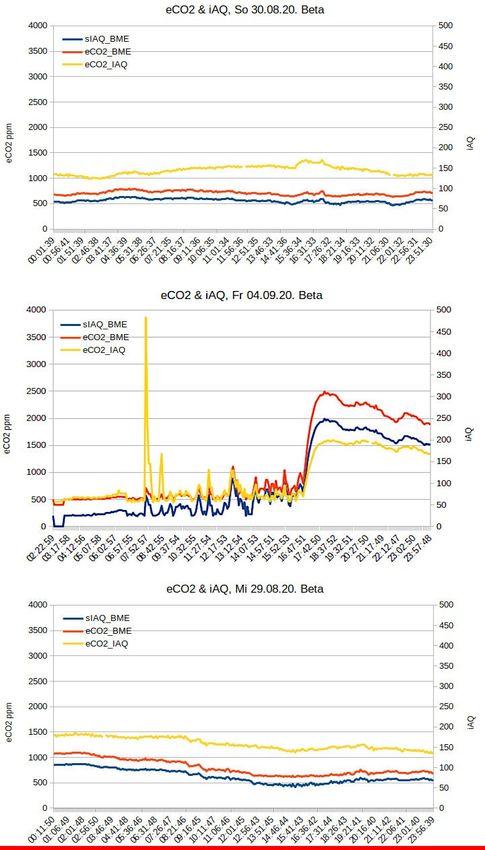
1 Einführung
Atemluft ist essenziell für nahezu jedes Lebewesen auf unserem Planeten. Die
Qualität der Atemluft kann sich jedoch durch verschiedene Faktoren
verschlechtern. Manche künstlich hergestellten Materialien setzen durch Ausgasung
chemische Verbindungen frei, doch auch die Atmung verändert die
Zusammensetzung der Luft. Einige dieser dadurch entstandenen Luftschadstoffe
haben negative Auswirkungen auf den Menschen. [Schulz-2019]
In dieser Arbeit soll eine technische Möglichkeit dargestellt werden, Luftschadstoffe
in Innenräumen zu messen und zu visualisieren. Anschließend werden beispielhaft
die Messungen mehrerer Tage mit einer Richtlinie für Innenraumluft verglichen.
1.1 Motivation
Bereits zu Beginn meines Studiums waren hardwarenahe Aufgaben eines der
interessantesten Themengebiete. Durch den Aspekt der mobilen Anwendungen
meines Studienganges, gab es mehrere Vorlesungen, welche sich mit der
Architektur von Computern und deren Programmierung in Assembler und C
befassten. Meine Bachelorarbeit sollte daher in diesem Bereich liegen.
Zusammen mit meinem Betreuer, Prof. Dr. Liebehenschel, hat sich eine
Aufgabenstellung gefunden, welche die hardwarenahen Aspekte in Form von
Mikrocontrollern und Sensoren mit dem wissenschaftlichen Ansatz der Messung
und Auswertung von Innenraumluft verbindet.
Diese Arbeit wurde auch von der Bachelorthesis David Merkls an der Frankfurt
University of Applied Sciences inspiriert, welche ein ähnliches Grundthema hat.
1.2 Planung
Während der Vorbereitung sollte die Luftqualität in Kursräumen der Hochschule
ausgewertet werden. Aufgrund von Vorschriften durfte dafür zwischen den
Sensoren und einem zentralen Server kein eigenes WLAN-Netz aufgebaut werden.
Auch die Nutzung des vorhandenen Funknetzes war nicht möglich. Diese
Erschwernisse erforderten eine Lösung in Form eines eigenen Funknetzes mit hoher
Reichweite, weshalb die Datenübertragung letztlich mit dem freien Standard
1
LoRaWAN realisiert wurde. Die hierfür bestellte Hardware hatte jedoch eine
Lieferzeit von mehreren Wochen.
Während des Wartens auf die Hardware breitete sich die COVID-19-Pandemie in
Europa aus. Das Messen in der Hochschule wurde dadurch unmöglich. Als
Alternative konnten die Messungen in der Firma ABK-Systeme Gesellschaft für
Ausbildung, Beratung und Kommunikationssysteme mbH ausgeführt werden.
1.3 Ziel der Arbeit
Diese Arbeit soll darstellen, wie man die Qualität der Innenraumluft messen und
auswerten kann. Die zulässigen Luftwerte sind aus der VDI-Richtlinie „VDI 6022
Blatt 3 – Beurteilung der Raumluftqualität (Juli 2011)“ [VDI 6022-3] entnommen,
welche die Basis für die Beurteilung darstellt. Mit dem in der Arbeit vorgestellten
Zusammenspiel aus Hard- und Software soll es möglich sein, eventuell schädliche
Konzentrationen bestimmter Gase festzustellen und durch zielgerichtetes Lüften
eine Belastung für Menschen in diesen Räumen zu minimieren.
2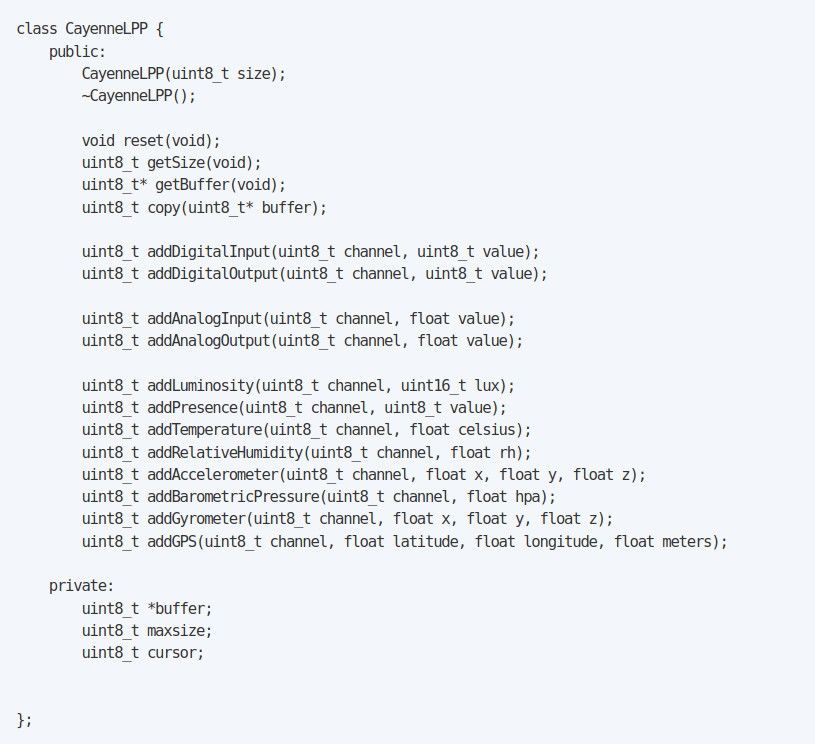
2 Messwerte finden und Hardware auswählen
Um Untersuchungen von Innenraumluft durchführen und mit Normen vergleichen
zu können, müssen bestimmte Merkmale der Luft und eine technische Infrastruktur
ausgewählt werden. Dieses Kapitel beschäftigt sich mit diesen Aspekten.
Für die Untersuchung werden Messstationen installiert, welche sowohl
Mikrocontroller als auch Sensoren enthalten, um gemessene Daten zu übertragen
und einen Server, welcher die Daten empfängt und speichert.
2.1 Festlegung der Messparameter
Da Schadstoffe in der Raumluft untersucht werden, benötigt die Messung Luft-
beziehungsweise Gassensoren, welche bestimmte Kriterien erfüllen müssen. Die
erste Eingrenzung für die zu wählenden Sensoren war der Preis. Der maximale
Preis je Sensor sollte 10 Euro nicht überschreiten, um mehrere Messstationen in
der gleichen Konfiguration zu ermöglichen. Die zu untersuchenden Gase sollen eine
gewisse Relevanz für den Menschen haben. Ein typisches Beispiel hierfür ist ein
CO2 Sensor, da dieses Gas ausgeatmet wird und bei zu hoher Konzentration in der
Atemluft schädlich ist. Auch wichtig ist, dass eine Verbindung zwischen dem
Sensor und dem Controller, welcher die Daten an den Server weiterleitet, möglich
ist. Der Sensor musste die Messdaten analog oder digital, zum Beispiel über die
Bussysteme I2C oder SPI, ausgeben. Außerdem sollte der Sensor möglichst
stromsparend sein.
Parallel dazu musste eine passende Norm für Innenraumluft gefunden werden. Es
gibt mehrere DIN-Normen und VDI-Richtlinien, welche sich ganz oder in Teilen
mit Innenraumluft beschäftigen. [DIN-IRL] Als passend hat sich die Richtlinie
„VDI 6022 Blatt 3 – Beurteilung der Raumluftqualität (Juli 2011)“ herausgestellt.
Durch die Auswahl von Sensoren und der VDI-Richtlinie konnten folgende
Messparameter festgelegt werden:
• Temperatur
• relative Luftfeuchtigkeit
• TVOC (Flüchtige organische Verbindungen)
• eCO2 (Geschätzter CO2 Wert)
3Zusätzlich werden folgende Parameter gemessen, aber nicht in dieser Arbeit
ausgewertet:
• Luftdruck
• technische Sensordaten
Die ursprüngliche Planung sah noch das Messen von CO vor, welches jedoch
aufgrund technischer Schwierigkeiten beim Aufbau verworfen wurde (siehe Kapitel
3.1.1).
2.2 Aufstellung der groben Infrastruktur
Die Messungen sollen in mehreren Räumen stattfinden. Dafür wird für jeden Raum
der gleiche Satz Sensoren zusammen mit einem Mikrocontroller und einer
Funkeinheit benötigt. Etwa 2 bis 3 unterschiedliche Sensoren sollen in jeder
Messeinheit verbaut sein. Die Messeinheiten sollten zu Beginn der Planung durch
die Verwendung von Akkus unabhängig von einer Steckdose sein. Durch Probleme
in der Umsetzung (siehe Kapitel 3.1.1) wurden sie auf eine Stromversorgung per
Netzteil umgerüstet.
Als Server wird ein einfacher Linux Rechner verwendet. Dieser benötigt eine
Funkeinheit zum Empfang von Daten der Messeinheiten und Internetzugang. Die
Daten müssen gespeichert und grafisch aufbereiten werden können.
Die Funkübertragung soll über den LoRaWAN Standard und das weltweit
kostenlos verfügbare „The Things Network“ (TTN) ablaufen. Dadurch können die
Messeinheiten nicht nur direkt an den Server, sondern auch über jeden anderen
Empfänger nahezu weltweit senden. Das TTN versendet die Daten nach dem
Empfang durch einen LoRaWAN Empfänger über das Internet, so dass es
unabhängig von dem Standort genutzt werden kann.
Der LoRaWAN Funk ist speziell auf eine hohe Reichweite von mehreren
Kilometern und einen niedrigen Stromverbrauch ausgelegt. Batterie- oder
akkubetriebene Geräte können im optimalen Fall mehrere Jahre funken. Die
Bandbreite beträgt maximal 11 kBit/s und kann unter ungünstigen Bedingungen
auf bis zu 250 Bit/s sinken. [TTN-1] Unabhängig von der erreichten Bandbreite
darf in Europa nur 1-Prozent der Zeit gesendet werden. In einem Zeitfenster von
60 Minuten dürfen somit maximal für 36 Sekunden Daten gesendet werden.
42.3 Hardware finden
Für die Messungen werden mehrere Hardwarekomponenten benötigt. Die
Messeinheiten brauchen einen Mikrocontroller, Sensoren und ein Funkmodul. Für
den Server muss zudem ein Computer, sowie ein Funkmodul für den Empfang der
Daten, ausgewählt werden.
2.3.1 Auswahl der Messeinheit-Hardware
Um die Messeinheiten steuern zu können, sind grundlegend Einplatinencomputer
wie Raspberry Pi und Arduino-Mikrocontroller geeignet. Der Raspberry Pi ist weit
verbreitet, bietet eine gute Softwareunterstützung und läuft als vollständiger
Computer mit einem eigenen Betriebssystem. Der Stromverbrauch ist mit etwa 2,5
Watt aber zu hoch, um für längere Zeit über einen Akku laufen zu können. [RPi-
Power] Ein Arduino ist deutlich sparsamer, hat dafür jedoch kein Betriebssystem
und ist etwa um den Faktor 100 langsamer. [Mkr-1310] Da eine Messung nur alle 5
Minuten stattfinden soll, ist ein Arduino für diesen Zweck ausreichend performant.
Der Hersteller der Arduino Mikrocontroller bietet verschiedene Versionen an,
wovon eine direkt mit LoRaWAN ausgestattet ist. Dieses Modell heißt „Arduino
MKR WAN 1310“ und wird für die Messeinheiten verwendet (siehe Abbildung 1).
Der Mikrocontroller hat einen ARM Cortex-M0+ Prozessor mit einem Takt von 48
MHz, 256 KB internen Speicher und 32 KB Arbeitsspeicher.
Abbildung 1: Ein Arduino MKR WAN 1310.
Bildquelle: https://store.arduino.cc/mkr-wan-1310
52.3.2 Auswahl der Sensoren
Die Auswahl geeigneter Sensoren ist aufwendiger, da es viele verschiedene Luft-
und Gassensoren auf dem Markt gibt. Mit den festgelegten Messparametern (siehe
Kapitel 2.1) war eine Einschränkung möglich. Der erste ausgewählte Sensor ist
„Bosch BME680“. Der Sensor misst die relative Luftfeuchtigkeit, den Luftdruck, die
Temperatur, den TVOC und einen davon abgeleiteten eCO2 Wert. Außerdem kann
mit den Daten des Sensors und einer properitären Software-Bibliothek ein „indoor
Air Quality“ (iAQ) Wert berechnet werden. [BME680] Die Software-Bibliothek
„Bosch Software Environmental Cluster“ (BSEC) kalibriert die Ausgabewerte
automatisch über mehrere Messungen. Die berechneten Werte werden mit einer
Angabe für die Genauigkeit angegeben. Es ist der einzige in dieser Arbeit
verwendete Sensor mit automatischer Kalibrierung.
Um den CO-Wert zu messen, wurde der Sensor MQ-7 des Herstellers DFRobot
ausgewählt. Dies ist ein analoger Sensor, welcher keine integrierte Logik hat und
eine wechselnde Spannungsversorgung benötigt. Wie in Kapitel 3.1.1 erläutert,
wurde dieser Sensor letztlich nicht in den Messungen verwendet.
Der letzte Sensor ist ein „ams iAQ-Core C“. Dieser Sensor wurde bereits in der
Bachelor Thesis von David Merkl genutzt und war in mehrfacher Stückzahl in der
Hochschule vorhanden. Dieser Sensortyp misst ebenfalls TVOC und daraus
abgeleitet eCO2.
2.3.3 Auswahl der Server-Hardware
Für Empfang, Speichern und Verarbeiten der Messwerte wird ein Raspberry Pi 3B
verwendet. Dieser Einplatinencomputer ist mit seinem 1,2 GHz ARM Cortex-A
Vierkernprozessor für die Aufgabe ausreichend dimensioniert. Um LoRaWAN
Signale mit dem Raspberry Pi empfangen zu können, muss er mit einer
Erweiterung ausgestattet werden. Dies funktioniert mit einem LoRaWAN Gateway,
welches alle Frequenzen dieses Funkstandards gleichzeitig überwachen und Daten
empfangen kann. Diese Gateways kosten oft mehrere hundert Euro. Das zum
Zeitpunkt der Recherche günstigste Gateway für einen Raspberry Pi war das „IoT
LoRa Gateway HAT for Raspberry Pi“ des Herstellers „Pi Supply“ (siehe
Abbildung 2). Durch eine bereitgestellte Software läuft die Erweiterung mit dem
Betriebssystem „Raspberry Pi OS“ und fungiert als Vermittler im TTN (siehe
Kapitel 4). Das Gateway Sendet und Empfängt Daten im 868 MHz
Frequenzbereich und arbeitet auf allen für LoRaWAN eingesetzten 8 Kanäle
6gleichzeitig. Das Gateway basiert dabei auf dem RAKWireless RAK833 oder
RAK2247 Modul, welche wiederum auf einem Semtech SX1301 Chip basieren, der
speziell für die Steuerung von LoRaWAN Gateways entwickelt wurde.
Abbildung 2: Ein LoRa Gateway HAT von Pi Supply.
Bildquelle: https://uk.pi-supply.com/products/iot-
lora-gateway-hat-for-raspberry-pi
2.4 Eingesetzte Entwicklungsumgebung und
Programmiersprachen
Die Messstationen werden mit Arduino Mikrocontrollern gesteuert. Für diese wird
das Steuerungsprogramm in der Programmiersprache C++ geschrieben. Hierfür ist
das Programm „Arduino Software“ die standardmäßige Integrierte
Entwicklungsumgebung (IDE). In der Software sind Treiber für eine
Kommunikation zwischen Mikrocontroller und Computer, eine Verwaltung von
zusätzlichen Software-Bibliotheken und ein Kompiler enthalten. Zusammen mit der
zusätzlichen Bosch BSEC Bibliothek stellt dies das Grundgerüst für die
Programmierung der Messstationen dar.
Da auf dem Server ein vollständiges GNU/Linux-Betriebssystem läuft, ist die
Programmierung in jeder kompatiblen Programmiersprache möglich. Für eine
möglichst komfortable Programmierung wird hier Python 3 verwendet. Das
LoRaWAN Gateway wird mit der vom Hersteller mitgelieferten Software genutzt.
Die Visualisierung der Messdaten wird mit LibreOffice Calc aus zuvor auf dem
Server erstellten CSV-Dateien angefertigt.
73 Entwicklung der Messeinheiten
Die Messeinheiten sind einer der beiden zentralen Bestandteile für die
Raumluftmessung. In ihnen sind die Sensoren mit dem Mikrocontroller elektrisch
verbunden. Die Sensoren werden ausgelesen, verarbeitet und die Messwerte
anschließend an den Server gefunkt.
3.1 Aufbau der Hardware
Alle Bauteile der Messeinheiten sind einzelne Elemente und müssen zu einer
funktionierenden Einheit zusammengebaut werden. Jede Messeinheit besteht dabei
aus den Sensoren, einem Arduino, einer Stromversorgung, einer Steckplatine
(Breadboard), einem Gehäuse und entsprechenden Kabeln. Neben den elektrischen
Verbindungen muss auch eine mechanische Stabilität gewährleistet sein. Die
Verwendung eines Breadboards ermöglicht schnelle Änderungen im Aufbau und ist
für den mittelfristigen Einsatz ausreichend.
3.1.1 Herstellung des Gehäuses
Für ein passendes Gehäuse, welches an der Wand befestigt werden kann und alle
Komponenten vor äußerer Einwirkung schützt, mussten die Teile prototypisch
zusammengefügt werden. Nach einer Messung kann die ungefähre Größe für das
Gehäuse bestimmt werden.
Das Gehäuse wird im 3D-Druck hergestellt. Die Vorlage für den 3D-Druck wird
zunächst mit dem Programm Tinkercad1 erstellt. Dieses Programm kann nach
Registrierung kostenlos über einen Browser verwendet werden. Um
dreidimensionale Objekte zu erstellen, werden einfache geometrische Formen
addiert oder subtrahiert, wodurch auch komplexe Objekte erstellt werden können
(siehe Abbildung 3).
1 https://www.tinkercad.com/
8Abbildung 3: Benutzeroberfläche von Tinkercad mit 3D Modell des
Messeinheit-Gehäuses. Bildquelle: Eigene Darstellung.
Sobald das Gehäuse erstellt ist, kann es als STL-Datei heruntergeladen und an den
3D-Drucker übermittelt werden. In diesem Fall wurde ein Ultimaker S3 für den
Druck benutzt. Dieser ist für Drucke mit hoher Qualität im industriellen Bereich
ausgelegt. Für den Druck wird PLA-Kunststoff verwendet.
Über mehrere Iterationen wurde das Gehäuse verbessert. Der Fokus für die
Verbesserungen lag auf einem schnellen Druck, einem Berührungsschutz, hohem
Luftdurchlass und geringer optischer Auffälligkeit bei möglichst hoher Stabilität.
Ein unauffälliges Aussehen war wichtig, da die Messeinheiten auch in Fluren mit
Publikumsverkehr über mehrere Wochen verbleiben sollen.
3.1.2 Probleme bei der der Planungsumsetzung
Bei dem Zusammenbau der Messeinheiten zeigte sich, dass die Integration des
analogen MQ-7 Sensors deutlich aufwendiger als die der beiden anderen Sensoren
war. Dies ist sowohl dem höheren Stromverbrauch als auch der für ihn notwendigen
wechselnden Spannungsversorgung geschuldet.
Der Sensor benötigt zum Aufheizen eine Spannung von 5 Volt, während für den
Betrieb 1,4 Volt benötigt werden. Die Stromversorgung für den Arduino liefert 5
Volt, der Arduino selbst stellt außerdem eine Spannung von 3,3 Volt bereit. Für
die notwendige Betriebsspannung des Sensors dient ein Spannungsteiler aus 2
Widerständen, für den Wechsel zwischen beiden Spannungen dient ein Relais mit
Wechselkontakten (siehe Abbildung 4). Der Spannungsteiler lieferte im Leerlauf
9eine Spannung von 1,4 Volt, mit angeschlossenem Sensor war die Spannung jedoch
nicht mehr stabil.
Abbildung 4: Schaltbild des ursprünglich Aufbaus. Bildquelle: Eigene
Darstellung.
Um die Spannung auch unter Last stabil zu halten, wurde der Spannungsteiler mit
einem Abwärtswandler (Step-Down-Converter) getauscht. Dieser lieferte auch mit
angeschlossenem Sensor stabile 1,4 Volt (siehe Abbildung 5).
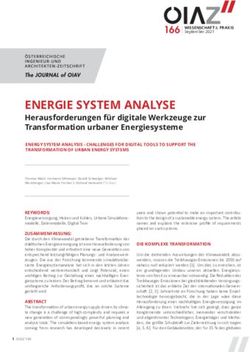
Ein weiteres Problem kam durch die benötigte Stromstärke des MQ-7 Sensors und
des Relais zustande. Mit 350 mW während der Aufheizphase [MQ7-Spec] wird
mehr Strom benötigt, als der Arduino über den 5V Ausgang liefern konnte. Durch
die Überlastung startete der Mikrocontroller nicht mehr. Zur Umgehung davon
10wurde der Strom direkt von dem USB-Netzteil bezogen, welches für dessen Betrieb
genug Leistung hat.
Auch hierdurch entstand ein Problem. Das Relais bekam Steuersignale aus dem
Arduino Stromkreis, die Stromversorgung des Relais kam direkt von dem USB-
Netzteil. In dieser Konfiguration lies sich das Relais nicht mehr steuern und
wechselte den Zustand selbstständig mehrmals pro Sekunde. Um nicht noch mehr
Zeit für den MQ-7 Sensor aufzuwenden, wurde er ab dieser Stelle ausgelassen.
Abbildung 5: Versuchsaufbau mit 3 Sensoren, Relais und Step-Down-
Converter. Bildquelle: Eigene Darstellung.
3.1.3 Finale Umsetzung
In dem Gehäuse jeder Messeinheit befinden sich sowohl die beiden VOC Sensoren
Bosch BME680 und ams iAQ-Core C als auch der Mikrocontroller Arduino MKR
WAN 1310. Der Arduino ist auf einem Stück Schaumstoff befestigt, da die GPIO-
Pins etwa 1 Zentimeter auf der Unterseite der Platine herauskommen. Die
Sensoren sind in ein Breadboard gesteckt.
Der Arduino ist über ein Micro-USB Kabel mit einem 5V Netzteil verbunden,
welches in einer 230 Volt Steckdose steckt. Die Sensoren werden über den 3,3 Volt
Pin des Arduinos mit Strom versorgt. Die Kommunikation zwischen Sensoren und
Arduino erfolgt über den Kommunikationsbus I2C. Dafür sind 2 Kabel-
Verbindungen notwendig, wobei ein Kabel den Takt (SCL, Serial Clock) und das
11andere die Daten (SDA, Serial Data) überträgt. Da I 2C ein
Master/Slave-Kommunikationsbus ist, können beide Sensoren an dieselben Pins des
Mikrocontrollers angeschlossen werden. Der Arduino fungiert als Master und
steuert die Kommunikation, die Sensoren sind die Slaves. Beide haben eine eigene
Adresse, um eine eindeutige Kommunikation gewährleisten zu können. Das
Schaltbild sieht man in Abbildung 7.
Für die Funkübertragung ist außerdem eine Antenne notwendig. Diese ist in den
dafür vorgesehenen Anschluss am Mikrocontroller gesteckt (U.FL Stecker). Die
Antenne ist an der Außenseite des Gehäuses befestigt, das Breadboard und der
Schaumstoff mit Mikrocontroller an der Innenseite.
Es gibt insgesamt 3 Messeinheiten. Zur Unterscheidung wurden folgende Namen
vergeben: Alpha, Beta und Gamma. Diese Namen sind sowohl auf der Hardware
angebracht als auch in der Software gespeichert. In Abbildung 6 sieht man eine
Messeinheit von innen und an der Wand befestigt.
Abbildung 6: Fertiggestellte Messeinheit. Bildquelle: Eigene Darstellung.
12Abbildung 7: Schaltbild des verwendeten Aufbaus. Bildquelle:
Eigene Darstellung.
3.2 Implementierung der Software
Die Software der Messeinheiten ist in der Programmiersprache C++ mithilfe der
IDE Arduino Software geschrieben. Um alle Funktionen der Hardware nutzen zu
können, müssen Software-Bibliotheken benutzt werden. Schließlich muss die
Steuerungslogik aufgebaut und das Programm getestet werden.
3.2.1 Verwendete Bibliotheken
Die verwendeten Software Bibliotheken sind über den in der IDE integrierten
Bibliotheksverwalter installiert. In diesem stellen Hersteller oder freie
13Programmierer zusätzliche Software zur Benutzung mit den Arduino
Mikrocontrollern oder deren Zubehör zur Verfügung. Folgende Bibliotheken
wurden verwendet:
• BSEC Software Library: Diese Bibliothek stammt von der Bosch Sensortec
GmbH und ist als einzige hier verwendete Bibliothek nicht als freier
Quellcode verfügbar. Mit ihr wird der Sensor BME680 gesteuert und
ausgelesen. Außerdem ermöglicht diese Bibliothek die automatische
Kalibrierung des Sensors. Die grundlegende Steuerung des Sensors ist auch
mit anderen Bibliotheken möglich, die Kalibrierung und die Berechnung des
iAQ Wertes ist jedoch nur über diese properitäre Software möglich. [BSEC]
• CayenneLPP: Für eine möglichst effiziente Übertragung der Daten über das
LoRaWAN Netz werden die Sensorwerte mit dieser Bibliothek in Binärform
übermittelt. Durch die vorgegebene Formatierung werden die Werte im
TTN automatisch erkannt und benötigen dort keinen Code zum
Identifizieren der einzelnen Sensorwerte in den binär übertragenen Daten.
[C-LPP] LPP steht für Low Power Payload.
• iAQ-CoreMI: Diese Bibliothek vereinfacht den Zugriff auf die Daten des
iAQ-Core C Sensors. Mit ihr wird der Sensor gesteuert und die Daten
ausgelesen. [Christandl-2019]
• MKRWAN: Diese Bibliothek ermöglicht die Verwendung des LoRaWAN
Tranceivers auf dem Arduino. Mit ihr kann die grundlegende Konfiguration
des Tranceivers vorgenommen werden. Außerdem stellt sie die Funktionen
zum Senden und Empfangen von Daten bereit. [MKRWAN]
3.2.2 Programmierung des Arduinos
Nach der Installation und Aktualisierung der IDE kann ein erster Funktionstest
des Arduinos mit den eingebauten Beispielprogrammen durchgeführt werden. Das
Beispielprogramm zum Blinkenlassen der eingebauten LED stellt sicher, dass der
Mikrocontroller und die USB-Verbindung zum Computer funktionieren. Die
benutzten Bibliotheken bringen alle eigene Beispielprogramme mit, mit denen man
die jeweiligen Funktionen testen kann und in die Verwendung eingeführt wird. Um
das Programm auf den Arduino zu übertragen, wird es von der IDE kompiliert und
anschließend auf den Speicher des Mikrocontrollers geschrieben (siehe Abbildung
8).
14Abbildung 8: Arduino Software beim Hochladen des Programmcodes.
Bildquelle: Eigene Darstellung.
Als erstes wurde die LoRaWAN-Unterstützung programmiert. Hierfür musste eine
korrekte Initialisierung, das sogenannte Setup, für die Hardware durchgeführt
werden. Wichtige Punkte sind hierbei die Wahl der richtigen Frequenz für Europa
(868 MHz) und die Wahl eines geeigneten Spreading-Faktors. Der Spreading-Faktor
(SF) beeinflusst die Reichweite und Übertragungslänge. Dies funktioniert, indem
das eigentliche Signal mit einem Spreizcode multipliziert wird. Je höher der
gewählte Spreading-Faktor ist, desto länger dauert die Übertragung. Die maximale
Reichweite für die Übertragung wird dadurch erhöht. [Semtech] Der niedrigste SF
ist die Standardeinstellung, um Übertragungszeit und Stromverbrauch gering zu
halten.
Um eine Verbindung zum TTN herstellen zu können, muss das Gerät einmalig
angemeldet werden. Dafür muss ein Konto und eine eigene Anwendung
(Application) auf der Webseite des TTN erstellt werden. 2 Für die Kommunikation
wird eine eindeutige Application ID und ein geheimer Zugangsschlüssel (Access
Key) generiert. Mit ihnen wird die Kommunikation sichergestellt. Anschließend
generiert das TTN eigene Schlüssel für das jeweilige Endgerät, wodurch eine
beliebige Anzahl an Geräten mit derselben TTN-Anwendung zusammenarbeiten
kann. Eine ausführliche Anleitung für diesen Vorgang findet sich hier3.
2 https://www.thethingsnetwork.org/
3 https://create.arduino.cc/projecthub/146376/mkr-wan-1310-meets-the-things-network-fff013
15Damit die empfangenen Daten aus dem TTN genutzt werden können, wird unter
„Integrations“ ein Datenspeicher eingerichtet. Dieser speichert sämtliche von der
Anwendung empfangenen Daten für 7 Tage und stellt eine API für den Abruf
dieser Daten aus dem Internet bereit.
Um Daten in die Anwendung im TTN senden zu können, wird in dieser Arbeit das
CayenneLPP Format benutzt. Für jeden Sensorwert kann ein passender Datentyp
gewählt werden. Einige Datentypen sind einer direkten Datenart zugeordnet,
beispielhaft Temperatur in einer Auflösung von 0,1° Celsius. Da die maximale
Größe der Datentypen sich unterscheiden und es nur eine begrenzte Vorgabe an
Typen gibt, wird sich in dieser Arbeit nur teilweise daran gehalten. Der Datentyp
luminosity (Helligkeit) ist ein 2 Byte großer unsigned Integer Wert (uint16_t),
welcher mit einem Wertebereich von 0 bis 65535 für viele verschiedene Sensorwerte
geeignet ist. Der ebenfalls vorhandene allgemeine Datentyp „Digital Input“ hat mit
einer Größe von 1 Byte nur einen Wertebereich von 0 bis 255 (uint8_t), wodurch
die Auflösung für viele Sensorwerte zu gering ist. Zur Zuordnung besitzt jeder
übertragene Wert, unabhängig vom Datentyp, eine eindeutige Kanalnummer. Eine
Übersicht zu den vorhandenen Datentypen findet sich in Abbildung 9.
Abbildung 9: Verfügbare CayenneLPP Datentypen
und deren Aufbau. Bildquelle:
https://developers.mydevices.com/cayenne/docs/lora/
#lora-cayenne-low-power-payload-reference-
implementation-cayenne-lpp-c-payload-builder
16Um den BME680 Sensor zu starten, muss dieser zunächst korrekt in der
Anwendung initialisiert werden. Hier muss beispielsweise die korrekte I 2C-Adresse
des Sensors eingetragen sein (hier: 0x77). Zu beachten ist die Angabe, wie oft der
Sensor neue Werte bereitstellen soll. Die eingestellte Zeit darf beim Abruf der
Sensordaten um maximal 50% überzogen werden, da sich der Sensor mit dem
regelmäßigen Abruf kalibriert. In dieser Arbeit wird eine Abfragezeit von 0,33
Hertz (etwa 3 Sekunden) verwendet. Dies bedeutet, dass frühstens 3 Sekunden
nach der letzten Abfrage ein neuer Messwert bereit steht. Außerdem dürfen die
Werte nicht später als 4,5 Sekunden nach der letzten Abfrage abgerufen werden, da
sonst die Kalibrierung verloren geht. Eine niedrige Abfragezeit ermöglicht eine
schnellere automatische Kalibrierung. [BSEC] Dies ist von Vorteil, da die
Kalibrierung nach einem Neustart des Sensors, beziehungsweise der Messstation,
verloren geht.
Da die Messwerte nur alle 5 Minuten übertragen werden sollen, hat das Programm
eine Hilfsschleife, in der alle 5 Sekunden der Sensor abgefragt wird, das
Hauptprogramm jedoch nur alle 5 Minuten durchlaufen wird.
Der iAQ-Core C benötigt keine Initialisierung. Sobald er mit Strom versorgt wird
startet er und ist bereit. Das minimale Abfrageinterval beträgt 1 Sekunde. Wird
dieses nicht eingehalten, liefert der Sensor einen Fehlercode anstelle eines
Messwertes. [ams]
174 Entwicklung des Servers und Verwendung des
„The Things Network“
Um die Daten der Messstationen empfangen und verarbeiten zu können, wird ein
Server mit LoRaWAN Gateway benötigt. Das Gateway empfängt die Daten der
Messstationen und leitet diese an das TTN weiter. Jedes Gateway im TTN ist
dabei öffentlich nutzbar. [TTN-Gateway] Ein eigenes Gateway ist somit nicht
zwingend notwendig, solange die Messstationen ein anderes in Empfangsreichweite
haben. Das TTN ist weltweites Netzwerk zur Datenübermittlung.
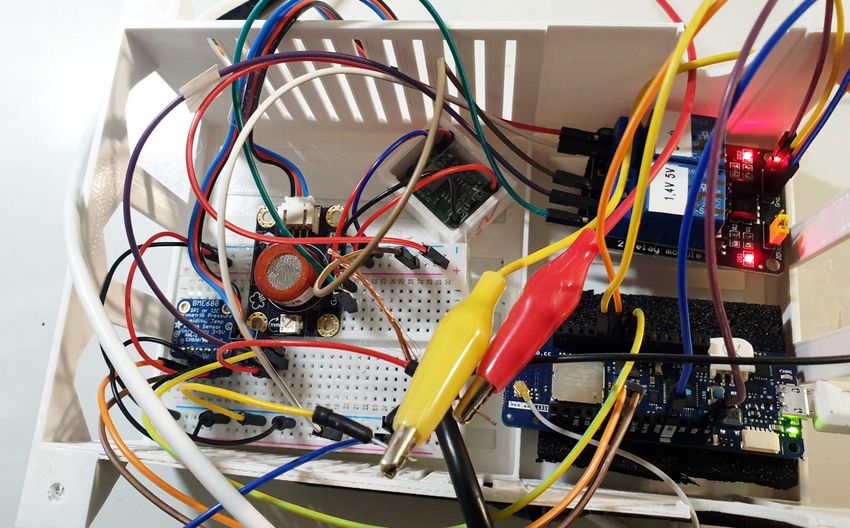
4.1 Das Gateway aufbauen und verbinden
Um das Gateway mit dem Raspberry Pi zu verbinden, muss es zunächst auf die
GPIO-Pins aufgesteckt und verschraubt werden. Die Antenne sollte möglichst
barrierefrei platziert sein, damit ein guter Empfang gewährleistet ist. In dieser
Arbeit sind die Sensoren jedoch innerhalb desselben Gebäudes wie der Server
aufgestellt, daher reicht auch die Platzierung direkt an einer Mauer aus (siehe
Abbildung 10).
Abbildung 10: Server bestehend aus Raspberry Pi und LoRaWAN Gateway.
Bildquelle: Eigene Darstellung.
18Um die Software für die Steuerung des Gateways verwenden zu können, wird ein
vom Hersteller bereitgestelltes Image für den Raspberry Pi verwendet 4. Das Image
basiert auf Raspberry Pi OS und ist mit den Treibern für das Gateway
ausgestattet. Von der Software für das Gateway abgesehen, unterscheidet es sich
nicht von dem Original. Der Raspberry Pi kann daher weiterhin als normaler Linux
Computer benutzt werden.
Das Image wird auf die microSD-Karte des Raspberry Pi überspielt, anschließend
kann dieser gestartet werden. Für die erste Einrichtung empfiehlt sich die
Verbindung per Ethernet-Kabel mit dem lokalen Netzwerk.
4.2 Das „The Things Network“ einrichten
Um das Gateway mit dem TTN zu verbinden, muss über die TTN Webseite ein
Eintrag für ein neues Gateway erstellt werden. Dort wählt man die passende
Konfiguration aus (Standort und Frequenz für Europa) und wählt einen
eindeutigen Namen (Gateway ID) für das Gateway. Eine ausführliche Anleitung für
diesen Vorgang findet sich hier5. Sobald die Einstellungen abgeschlossen sind,
bekommt man einen geheimen Gateway-Schlüssel, der die Kommunikation zum
TTN absichert (siehe Abbildung 11).
Abbildung 11: Die Gateway-Statusseite im TTN. Bildquelle: Eigene
Darstellung.
4 Download unter https://pisupp.ly/iotsd
5 https://learn.pi-supply.com/make/iot-lora-gateway-sd-card-image-setup/
19Um das Gateway zu konfigurieren muss ein IP-fähiger Client im Netzwerk des
Servers verwendet werden. Über den Browser am Computer ruft man nun die
Adresse iotloragateway.local auf. Im Bereich „System Controls“ wird jetzt die zuvor
festgelegte Gateway ID und der geheime Schlüssel eingetragen. Nach einem
Neustart des Raspberry Pi wird auf der Statusseite angezeigt, dass das Gateway
korrekt konfiguriert wurde (siehe Abbildung 12). Das Gateway empfängt jetzt alle
LoRaWAN Übertragungen und leitet sie über das Internet an das TTN weiter.
Dabei ist es öffentlich verfügbar und kann es von jedem LoRaWAN Gerät in
Reichweite verwendet werden.
Abbildung 12: Die Gateway-Statusseite des Raspberry Pi Servers.
Bildquelle: Eigene Darstellung.
205 Messdaten sammeln und auswerten
Die gemessenen Daten müssen dauerhaft gespeichert, bearbeitet und visualisiert
werden. Mithilfe der erzeugten Diagramme wird eine Auswertung der
Innenraumluft erstellt. Das Sammeln der Daten und die Analyse wird in diesem
Kapitel beschrieben.
5.1 Transfer der Daten vom TTN auf den Server
Die Messdaten sind bisher nur im TTN gespeichert und werden nach 7 Tagen
gelöscht (siehe Kapitel 3.2.2). Um die Messdaten dauerhaft auf dem Server
speichern zu können, wurde ein Python Programm implementiert, welches die
Daten über die im TTN bereitgestellte API abruft.
Die heruntergeladenen Dateien sind im JSON Format gespeichert und beinhalten
die Datensätze der letzten 7 Tage. Es werden je die Werte eines einzelnen Sensors
heruntergeladen. Die API ist durch einen Schlüssel gesichert, welcher wiederum im
Programm gespeichert wird. Die in der Arduino-Anwendung der Messstation
formatierten CayenneLPP-Werte bekommen nun den endgültigen Namen, der auch
in den später erstellten Diagrammen genutzt wird (siehe Abbildung 13). Manche
Felder der JSON-Datei werden hierbei ignoriert. Die Binärdaten, welche der
Arduino übermittelt hat, waren bis zu diesem Schritt noch komplett erhalten.
Abbildung 13: Zuweisung der Messwert-Namen im
Python Programm. Bildquelle: Eigene Darstellung.
21Für jeden Tag und jeden Sensor wird eine eigene CSV-Datei erstellt, um die Daten
übersichtlich und geordnet zu speichern. Das Python Programm wird über ein
Bash-Skript mehrmals aufgerufen. Dabei werden je Aufruf die Daten eines
einzelnen Sensors abgefragt. Um diesen Vorgang mehrmals am Tag automatisch
auszuführen, wurde ein cronjob auf dem Server eingerichtet. Ein Ausschnitt des
Python Programms wird in Abbildung 14 gezeigt.
Abbildung 14: Ausschnitt Python Programm zum Download der Daten.
Bildquelle: Eigene Darstellung.
5.2 Messdaten visualisieren
Die im CSV-Format vorliegenden Messdaten können nun grafisch dargestellt
werden (Plotten). In dieser Arbeit wird dies mit LibreOffice Calc durchgeführt, da
nur einzelne Tage ausgewertet werden.
Eine ausgewählte CSV-Datei wird dafür in Calc importiert. Dabei ist darauf zu
achten, dass als Import-Sprache „Englisch (USA)“ gewählt ist, da die Messdaten
englische Dezimaltrennzeichen verwenden. Die nun vorliegende Tabelle enthält
knapp 300 Einträge.
Zum Plotten werden alle Spalten markiert, die dargestellt werden sollen. Hier wird
die Zeit (time), die eCO2 Werte beider Sensoren (eCO2_BME, eCO2_IAQ) und
der iAQ Wert (sIAQ_BME) ausgewählt und damit das Diagramm erstellt (siehe
Abbildung 15).
22Abbildung 15: Visualisierung der Messdaten in LibreOffice Calc.
Bildquelle: Eigene Darstellung.
Für diese Arbeit wird das Diagramm mit folgenden Einstellungen generiert: Der
Diagrammtyp ist Liniendiagram, nur Linien. Die X-Achse stellt die Zeit dar. Die
primäre Y-Achse zeigt den eCO2 Wert in ppm, die sekundäre Y-Achse zeigt den
iAQ Wert. Die Kurve des iAQ Wertes wird auf die sekundäre Y-Achse gelegt.
Anschließend wird beiden Y-Achsen ein manueller Maximalwert zugewiesen, um
die Diagramme vergleichen zu können. Das eCO 2 bekommt den Maximalwert
20.000 (je nach Vergleichswerten eventuell abweichend), iAQ bekommt den
Maximalwert 500.
Das fertige Diagramm kann nun als Bild exportiert werden.
5.3 Standorte der Messstationen
Die Messstationen sind an 3 verschiedenen Orten aufgestellt, um unterschiedliche
Daten zu erhalten.
Messstation Alpha steht in einem Flur mit 3 Laserdruckern. Diese werden
regelmäßig genutzt und drucken mehrere hundert Seiten täglich. Laserdrucker
erzeugen bei ihrem Betrieb zahlreiche Partikel, die in die Umgebung abgegeben
werden. Neben Feinstaub, welcher in dieser Arbeit nicht gemessen wird, werden
auch VOCs ausgestoßen. [Stelting-2016] Die angenommene Hypothese für diese
23Messstation ist, dass die Luftqualität an Werktagen schlechter ist, als nachts oder
am Wochenende.
Beta befindet sich in einem Büroraum von etwa 24 qm Größe, in dem bis zu 5
Personen sitzen. Dieser Raum wird vergleichsweise selten gelüftet. Außerdem
enthält der Raum mehrere kleine Server, die permanent in Betrieb sind. Die
Hypothese für diese Messstation ist, dass die Luftqualität an Werktagen schlechter
ist als am Wochenende und sich nur langsam erholt.
Gamma befindet sich im Eingangsflur. Dieser Bereich ist weiträumig und wird
häufig von Personen durchquert. Gleichzeitig wird die Eingangstür regelmäßig
geöffnet. Die Hypothese für diese Messstation ist, dass die Luftqualität meist gut
ist und sich schnell erholt.
In Abbildung 16 sieht man die Messstationen mit ihrer Umgebung.
24Abbildung 16: Umgebung der Messstationen Alpha,
Beta und Gamma (von oben nach unten).
Teilweise aus Datenschutzgründen verpixelt.
Bildquelle: Eigene Darstellung.
255.4 Vergleich der Messdaten mit der VDI-Richtlinie
6022-3
Damit die Messwerte einen Bezug bekommen, werden sie mit der VDI-Richtlinie
6022-3 in Verbindung gebracht. Die Umgebung der Messstationen kann dadurch
einer bestimmten Raumluftqualität zugeordnet werden.
5.4.1 Ausgewählte Vorgaben und ihre Werte
Die VDI-Richtlinie teilt die Raumluft in 4 mögliche Raumluftqualitäten (RAL) ein.
RAL 1 hat die höchste Raumluftqualität und soll in Räumen mit besonderen
Anforderungen, beispielsweise Pflegeräume, vorherrschen. RAL 2 hat eine noch
gute Qualität und sollte in Räumen mit installierter Raumlufttechnik vorherrschen.
RAL 3 soll in normalen Räumen ohne Raumlufttechnik vorherrschen. RAL 4 ist
nicht mehr für Räume mit dauerhaftem Aufenthalt geeignet. [VDI 6022-3] Die
Innenraumluft in Büroräumen sollte mindestens RAL 3 betragen.
Jede RAL-Stufe hat Vorgaben zu verschiedenen Stoffen und deren maximal
erlaubte Konzentration. In Abbildung 17 sind die vorgegebenen Werte für CO 2, CO
und TVOC dargestellt.
Abbildung 17: Vorgabe der Schadstoffwerte. Bildquelle: Eigene Darstellung,
nach [VDI 6022-3].
Zusätzlich wird der berechnete iAQ-Wert des Bosch BME680 mit angegeben. Die
Werte reichen von 0 bis 500, wobei 0 für eine gute und 500 eine sehr schlechte
Innenraumluftqualität steht (siehe Abbildung 18).
26Abbildung 18: Bosch iAQ Index. Bildquelle: [BME680]
5.4.2 Einhaltung der Grenzwerte in ausgewählten Zeiträumen
Für die Auswertung in dieser Arbeit ist exemplarisch ein Zeitraum von 2 oder 3
Tagen ausgewählt worden. Anhand dieser Diagramme wird der RAL Wert der
Umgebung bestimmt. Außerdem wird versucht die jeweilige Hypothese bei der
Standortwahl zu verifizieren (siehe Kapitel 5.3).
Zu beachten ist hierbei, dass beide Sensoren unterschiedliche Werte für die eCO 2
Konzentration ausgeben, da die Sensoren nicht kalibriert sind.
Messstation Alpha
Der ams Sensor zeigt für den ausgewählten Sonntag, 30. August 2020, durchgehend
eCO2 Werte von maximal 2000 ppm, der Bosch Sensor von maximal 1000 ppm an.
Je nach Sensor würde damit RAL 1 oder nur RAL 3 erreicht werden. Der iAQ
Wert wechselt von etwa 80 in der Nacht auf 50 ab mittags für den Rest des Tages.
Damit liegt es in einem mittleren bis guten Bereich (siehe Abbildung 19).
Donnerstags schwanken die Werte vermehrt. Der CO2 Wert steigt gegen 23:00 Uhr
auf über 20.000 ppm (iAQ-Core) / 4000 ppm (BME680). Über den gesamten Tag
wird der Wert von 2000 ppm / 1000 ppm6 nur selten unterschritten. Nach dem
iAQ-Core wird somit nur RAL 4 erreicht, nach dem BME680 schwankte die eCO 2
Wert tagsüber zwischen RAL 2 und RAL 3, ab 18:00 Uhr wird nur noch RAL 4
erreicht. Auch der iAQ Wert schwankt vermehrt. Morgens und abends wird ein
„guter“ Wert erreicht, während früh morgens und vormittags der Wert zwischen
durchschnittlich und leicht schlecht liegt. Ab dem Abend wird schlecht und sehr
schlecht erreicht.
Die Hypothese, dass die Werte werktags schlechter sind, scheint tendenziell
bestätigt. Langfristig muss dies durch zusätzliche Auswertungen verifiziert werden.
6 Bei Angabe von 2 mit Schrägstrich getrennten Werten bezieht sich der erste Wert auf den ams
iAQ-Core Sensor und der zweite auf den Bosch BME680 Sensor.
27Abbildung 19: Ausgewählte eCO2 und iAQ Werte von
Messstation Alpha. Bildquelle: Eigene Darstellung.
Messstation Beta
Für Messstation Beta werden 3 Tage nebeneinander gestellt. Die Werte von
Sonntag und Mittwoch haben einen ähnlichen Verlauf und zeigen eine eCO 2
Konzentration von etwa 500 bis 1000 ppm nach BME680 und 1000 bis 1500 ppm
nach iAQ-Core. Dadurch liegt die Luftqualität bei RAL 1 / RAL 2, was einer
guten bis sehr guten Luftqualität entspricht. Der iAQ Wert liegt an beiden Tagen
durchgehend zwischen 50 und 100, was mittelmäßig ist (siehe Abbildung 20).
Am Freitag sind die Luftwerte nicht mehr so gut und schwanken stärker. Von
Tagesbeginn bis spät nachmittags liegt der iAQ-Core eCO2 Anteil zwischen 500
und 1000 ppm mit einem größeren Ausbruch gegen 8:00 Uhr auf über 3500 ppm.
Ab dem späten Nachmittag steigt der Wert auf 1500 ppm und verbleibt dort. Der
BME680 zeigt zum großen Teil beinahe dieselben Werte an, der Ausbruch um 8:00
28Uhr ist jedoch nicht vorhanden. Ab dem späten Nachmittag steigt der Wert auf
2500 ppm und sinkt bis Mitternacht auf etwa 2000 ppm. Die Luftreinheit liegt an
diesem Tag bei nahezu durchgehend RAL 1 mit beiden Sensoren, ab dem späten
Nachmittag stinkt die Qualität auf RAL 2 / RAL 4.
Der iAQ Wert zeigt bis zum späten Nachmittag gute Werte an, ab dann sinkt die
Qualität jedoch auf schlecht.
Die Hypothese, dass der Raum Werktags eine schlechtere Raumluft als am
Wochenende hat, kann hier nicht bestätigt werden. Für ein genaueres Verständnis
werden mehr Daten gebraucht, welche möglicherweise mit dem Zustand des
Fensters (geschlossen oder gekippt) in Verbindung gebracht werden können.
Messstation Gamma
Für diese Messstation sind 3 aufeinanderfolgende Tage dargestellt. Mittwochs liegt
der eCO2 Wert meist um 2000 ppm / 1000 bis 2000 ppm, hat jedoch einige Spitzen
mit 7000, 12.000 und 20.000 ppm nach dem iAQ-Core. Diese Spitzen sind auch mit
dem BME680 zu erkennen, liegen jedoch nur bei etwa 3000, 2200 und 4000 ppm.
Die Raumluftqualität liegt die meiste Zeit bei RAL 4 / RAL 2 bis 3, während der
iAQ Wert Mittags im durchschnittlichen Bereich und den Rest des Tages schlecht
bis sehr schlecht ist (siehe Abbildung 21).
Der darauffolgende Donnerstag liegt fast durchgehend um 2000 / 1000 ppm und
hat über den Tag verteilt kleinere Ausbrüche. Ab der Nacht gibt es größere
Ausschläge mit bis zu 11.000 / 3000 ppm und über 20.000 / 5000 ppm. An dem
Tag liegt die Luftqualität bei RAL 3 bis 4 / RAL 2, während beide Sensoren durch
Ausschläge in der Nacht RAL 4 anzeigen. Der iAQ Wert liegt tagsüber im
mittleren Bereich und geht in der Nacht in den sehr schlechten Bereich über.
Der folgende Freitag hat schwankende eCO 2 Werte zwischen 1500 / 1000 ppm und
5000 / 2000 ppm, aber keine größeren Spitzen. Die Raumluft ist nahezu
durchgehend bei RAL 4 / RAL 3. Der iAQ Wert liegt bei Tagesbeginn und ab dem
Nachmittag im leicht schlechten Bereich, Mittags ist er mittelmäßig.
Die Hypothese, dass die Raumluftqualität bei dieser Messstation eher gut ist, wird
an allen 3 Tagen nicht bestätigt. Die Luft ist hier deutlich schlechter als vermutet.
29Abbildung 20: Ausgewählte eCO2 und iAQ Werte von
Messstation Beta. Bildquelle: Eigene Darstellung.
30Abbildung 21: Ausgewählte eCO2 und iAQ Werte von
Messstation Gamma. Bildquelle: Eigene Darstellung.
316 Endbetrachtung
6.1 Zusammenfassung
Mit moderatem technischen Aufwand ist eine Innenraumluftmessung durchführbar.
Der Aspekt der Datenübertragung über eine hohe Entfernung erhöht den Aufwand
für den Aufbau, kann mit besonderen Anforderungen aber die einzige Möglichkeit
zur Gewinnung regelmäßiger Messdaten über einen hohen Zeitraum sein.
Sobald die Messstationen und der Server fertig aufgestellt sind, ist der Betrieb zur
langfristigen Messung zu einem großen Teil automatisiert. Lediglich die
Auswertung der Messdaten erfordert wieder einen manuellen Eingriff.
6.2 Fazit
Die ausgewerteten Messdaten zeigen eine oftmals nur mittlere Raumluftqualität.
Die für den jeweiligen Standort aufgestellten Hypothesen wurden in 2 von 3 Fällen
nicht bestätigt. Die Qualität der Innenraumluft hängt möglicherweise von Faktoren
ab, die nicht durch einfache Beobachtung erkennbar sind. Dies zeigt die
Wichtigkeit solcher Messungen, um Personen in Innenräumen vor schlechter
Luftqualität zu schützen. Lediglich die Luftqualität von Messstation Alpha, in
unmittelbarer Umgebung von 3 Laserdruckern, zeigt in dem geprüften Zeitraum
einen möglichen Zusammenhang von ausgestoßenen Partikeln, die zu einer
schlechteren Luftqualität führen.
6.3 Ausblick
Es gibt vielfältige Möglichkeiten, diese Arbeit weiterzuführen. Nachstehend 7 von
mir angeführte Punkte:
1. Das Sammeln der Messwerte könnte zuverlässiger aufgebaut werden, indem
die Daten nicht über das TTN geleitet, sondern direkt auf dem Server
gespeichert werden. Auch ein kleiner Speicher in den Mikrocontrollern der
Messstationen wäre hilfreich, wenn der Server oder das TTN einen Ausfall
hat.
2. Die Verwendung von Fenster- und Türsensoren, sowie Sensoren zur
Anwesenheitserkennung von Personen, würde den Auswertungen eine
32weitere Dimension geben. Auch fremde Daten, wie die Einbindung des
lokalen Wetterberichts, könnten bei der Auswertung hilfreich sein.
3. Eine automatische Visualisierung der Messwerte mit geeigneter Software
(zum Beispiel Gnuplot7 oder RRDtool8) würde eine große Zeitersparnis bei
der Auswertung bringen. Auch ein Einzeichnen der Schwellwerte direkt in
die Diagramme würde bei der Auswertung hilfreich sein.
4. Gerade bei langfristigen Messungen ist ein Speichern und Verwalten der
Messdaten in einer Datenbank, anstatt in einzelnen Dateien, sinnvoll.
5. Das Anbringen eines Displays oder einer anderen Form der Visualisierung
direkt an der Messstation könnte Personen in der Nähe
Echtzeitinformationen über die Luftqualität geben. Bei zeitversetzter
Auswertung könnte ein Programm erhöhte Werte erkennen und diese
beispielsweise per E-Mail mit dem genauen Zeitpunkt versenden.
6. Mit dem Einbinden weiterer Sensoren könnten noch mehr Informationen
gewonnen werden. Eine Ergänzung mit einem echten CO2 NDIR-Sensor
würde die Messdaten deutlich genauer machen, da der eCO 2 Wert nicht
immer mit den wirklichen CO2 Werten übereinstimmt. [Riffi-2018]
7. Zuletzt wäre eine Kalibrierung der Sensoren mit geeichter Hardware ein
gutes Mittel, um die Aussagekraft und Genauigkeit der Messungen weiter zu
stärken.
7 http://www.gnuplot.info/
8 https://oss.oetiker.ch/rrdtool/
33Glossar
Begriff Definition / Erklärung
ams ams AG, Hersteller von Sensoren und
elektronischen Bauteilen
API Application Programming Interface,
Programmierschnittstelle
Assembler Eine hardwarenahe Programmiersprache
Bash Bourne-again shell, ein Unix/Linux
Programm
Breadboard Steckplatine, zur Verbindung
elektronischer Bauteile
C Eine hardwarenahe Programmiersprache
C++ Eine hardwarenahe Programmiersprache
CO Kohlenstoffmonoxid
CO2 Kohlenstoffdioxid
cronjob Teil von Linux zum regelmäßigen
Ausführen von Programmen
CSV Comma-separated values, Dateiformat
DIN Deutsches Institut für Normung e. V.
eCO2 Estimated CO2, geschätzter CO2 Wert
GPIO General Purpose Input/Output,
elektrische Kontaktstellen
I2C Inter-Integrated Circuit, Datenbus
Standard
iAQ Indoor Air Quality, Qualität der
Innenraumluft
IDE Integrated development environment,
Integrierte Entwicklungsumgebung
Image Speicherabbild, beispielsweise zur
Datensicherung
JSON JavaScript Object Notation, Datenformat
Kompilieren Ein Programm in Maschinencode
übersetzen
LoRaWAN Long Range Wide Area Network
NDIR Nichtdispersiver Infrarotsensor
Proprietär Nicht frei[e Software]
Python Eine höhere, nicht kompilierte
Programmiersprache
RAL Raumluftqualität
34Sie können auch lesen