Vom Bildverband zum as-built BIM - RWTH Publications
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Vom Bildverband zum as-built BIM
Sören Loges
Geodätisches Institut, RWTH Aachen, Mies-van-der-Rohe Straße 1, Deutschland
E-Mail: loges@gia.rwth-aachen.de
Abstract In diesem Paper wird grundlegend das Konzept von der Datenaufnahme hin zur
automatisierten Erzeugung eines as-built BIM-konformen Modells skizziert. Hauptaugenmerk
liegt auf der Segmentierung einer Punktwolke in einzelne Räume anhand der, während der
Aufnahme zurückgelegten, Trajektorie. Der konzipierte Ansatz beruht auf der Analyse von
Histogrammen. Für einzelne Positionen der Trajektorie werden die sichtbaren Punkte bestimmt
und in Histogrammen zusammengefasst. Durch einen sequentiellen Vergleich werden die Histo-
gramme der Positionen auf ausreichende Übereinstimmung getestet. Stimmen sie nicht überein
wird ein Raumübergang detektiert. Das Ergebnis sind Histogramme einzelner Räume sowie die
ungefähre Lage von Raumübergängen.
Abstract This paper outlines the general process from data acquisition to automated gene-
ration of as-built models. The main focus is on the segmentation of a point cloud in individual
rooms based on the traveled trajectory while acquiring the data. The proposed approach is ba-
sed on the analysis of histograms. From predefined positions on the traveled trajectory visible
points are determined and summarized in histograms. These histograms are tested for sufficient
agreement by sequential comparison. If the test failed, a transition (door) between two rooms
is detected. The result contains histograms for the individual rooms and approximates the door
placement.
Keywords: Photogrammetrie, SfM, as-built BIM
1 Einleitung
In Deutschland nimmt die Bedeutung der Methode Building Information Modelling (BIM)
stark zu. So hat das Bundesministerium für Verkehr und digitale Infrastruktur im Dezember
2015 einen Stufenplan zur stufenweisen Einführung von BIM bei Planung und Umsetzung
von großen Verkehrsprojekten bis 2020 verabschiedet. Die Grundlage von BIM bildet ein in
der Regel semantikreiches bauteilorientiertes Gebäudemodell, das idealerweise während der
Planungsphase erzeugt und über den Lebenszyklus des Gebäudes gepflegt wird. Handelt es sich
jedoch nicht um einen Neubau sondern um eine Planung im Bestand, z.B. Sanierungs- oder
Umnutzungsvorhaben, muss ein entsprechendes as-built Modell für die Planung erst aus dem
Gebäudebestand erzeugt werden.
19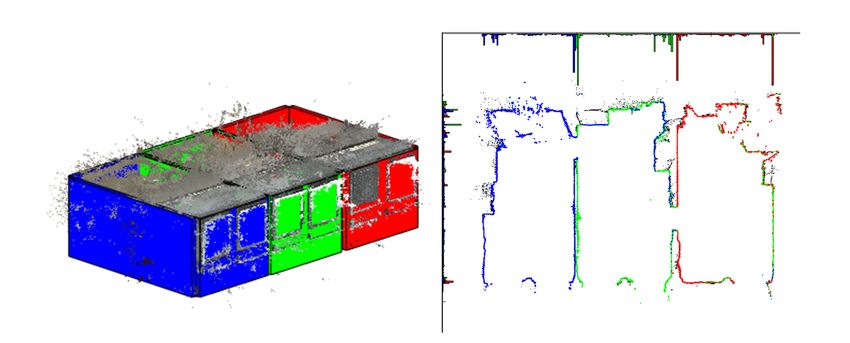
Vom Bildverband zum as-built BIM Für eine solche Bestandsaufnahme stehen verschiedene Verfahren bereit, welche jedoch meist eher mit konventionellen zeichnungsorientierten CAD-Modellen und weniger mit den geforderten bauteilorientierten Modellen konform gehen. Zur as-built Dokumentation bietet sich u.a. die Erzeugung von Punktwolken (z.B. durch terrestrische Laserscanner oder Photo- grammetrie) an, da diese je nach Punktdichte ein detailreiches Abbild des Bestandes darstellen. Forschungsbedarf besteht hier in der Entwicklung und Erprobung von Aufnahmeverfahren, die eine kontinuierliche und zeiteffiziente sowie eine detailreiche Erfassung des Bestandes ermöglichen. Die eigentliche Ableitung des Modells erfolgt nach der Datenaufnahme in der Nachbearbei- tung. Im Falle einer aufgenommenen Punktwolke wird diese händisch strukturiert und Bauteile z.B. über die Extrusion von Schnittbildern erzeugt. Die Eingabe der weiteren Bauteileigenschaf- ten erfolgt ebenfalls manuell. Diese größtenteils händische Erzeugung des bauteilorientierten Modells bedeutet einen hohen zeitlichen und personellen Aufwand. Diesen Prozess der Er- zeugung des as-built Modells gilt es durch die Erforschung von automatisierten Verfahren effizienter zu gestalten. 2 Aufnahmeverfahren zur Bestandserfassung Zur Bestandsdatenerfassung für das Gebäudeaufmaß können verschiedene originäre Messver- fahren verwendet werden. Abb. 1 liefert hierzu eine Übersicht. Nach Blankenbach (2015) sind die vier für ein Gebäudeaufmaß grundsätzlichen Basisverfahren die Photogrammetrie, das terrestrisches Laserscanning, die Tachymetrie und das elektronische Handaufmaß. Eine Diskus- sion der verschiedenen Messverfahren wird in Blankenbach (2015) gegeben und aus diesem Grund an dieser Stelle nicht weiter thematisiert. Im BIM Kontext wird besonders das terrestrische Laserscanning für die as-built Dokumenta- tion angepriesen, welches den Begriff „Scan-to-BIM“ geprägt hat. (Braunes, 2014). Ein Grund dafür ist die Erfassung von hochaufgelösten Punktwolken, die eine flexible Erzeugung von Modellen unterschiedlicher Detailierungsgrade ermöglicht. Nachteile des terrestrischen Lasers- cannings sind die hohen Kosten, die lange statische Scandauer und die notwendige Verknüpfung, Registrierung, von Punktwolken unterschiedlicher Scanpositionen sowie der hohe manuelle Mo- dellierungsaufwand im Post-Processing. Eine deutlich günstigere Alternative ist die Erzeugung einer Punktwolke aus Bildern mittels der photogrammetrischen Methode Structure from Moti- on (SfM), die eine zügige mobile Datenaufnahme ermöglicht, bereits eine zusammenhängende Punktwolke liefert und orientierte Bilder zur weiteren Analyse bereitstellt. Im Folgenden wird daher näher auf die Photogrammetrie und SfM eingegangen. 2.1 Photogrammetrie Die Photogrammetrie umfasst allgemein Methoden, um aus einem oder mehreren Bildern die Form und Lage eines beliebigen Objektes zu ermitteln. Man unterscheidet in der Photogramme- trie die Aufnahmekonfigurationen: Einzelbildaufnahme, Stereobildaufnahme und die Mehrbild- aufnahme. Die Einzelbildaufnahme beschreibt die Erfassung eines Objektes mit einem Bild und findet ihre häufigste Anwendung in der Erstellung von Entzerrungen und Orthobildern sowie der ebenen Objektauswertung. In der praktischen Anwendung für die Gebäudemodellierung wird sie in der Auswertung ebener Hausfassaden genutzt. Die Stereobildaufnahme beschreibt 20
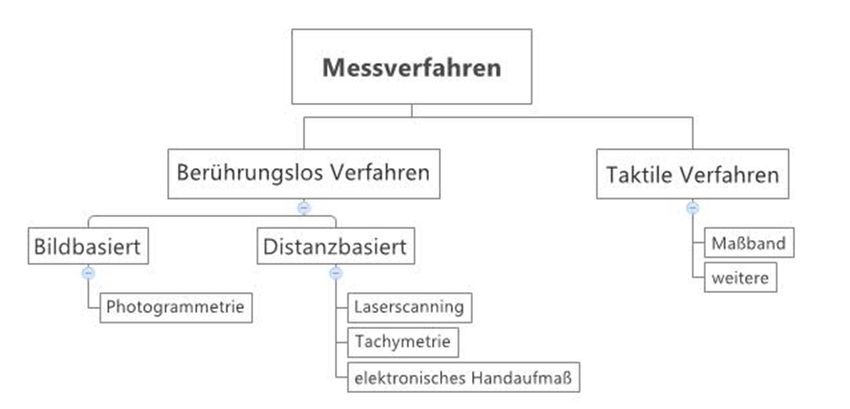
28. Forum Bauinformatik
Session 1
Abb. 1: Übersicht der originären Messverfahren zur Bestandsdatenerfassung
die Aufnahme eines Objektes anhand von zwei Bildern. Ist die äußere Orientierung der Aufnah-
men zueinander bekannt, können 3D-Koordinaten homologer Punkte über einen räumlichen
Rückwärtsschnitt bestimmt werden. Die äußere Orientierung beschreibt allgemein die Lage und
Ausrichtung des räumlichen Bildkoordinatensystems im übergeordneten Objektkoordinatensys-
tem und wird durch sechs Parameter, drei Translationen und drei Rotationen, festgelegt. Wie
Abbildung 2 zu entnehmen ist, setzt sich die äußere Orientierung aus dem räumlichen Vektor
X0 , der vom Ursprung des Objektkoordinatensystems zum Projektionszentrum O der Kamera
zeigt, und der Rotationsmatrix R, welche die Orientierung im Raum beschreibt, zusammen. Die
Rota-tionsmatrix kann durch die Drehungen ω, ϕ, κ um die Koordinatenachsen X, Y, Z gebildet
werden. Ebenfalls aus Abbildung 2 zu entnehmen sind die Parameter der inneren Orientierung
(Kamerakonstante c, Bildhauptpunkt H, Verzeichnungsparameter) auf die jedoch an dieser Stel-
le nicht weiter eingegangen werden soll; hierzu sei auf die Fachliteratur (z.B. (Luhmann, 2003))
verwiesen. Die Mehrbildphotogrammetrie ist die gebräuchlichste Aufnahmekonfiguration. Ein
Objekt wird mit beliebig vielen Bildern erfasst und ermöglicht so z.B. eine rundum Aufnahme
oder die gleichzeitige Innen- und Außenaufnahme. Die Bestimmung der Objektkoordinaten
erfolgt durch Verfahren der Bündeltriangulation. In diesem überbestimmten Gleichungssystem
werden die 3D-Koordinaten, Orientierungsparameter der Bilder und weitere Modellparameter
zusammen mit Angaben ihrer Genauigkeit und Zuverlässigkeit durch Ausgleichungsrechnung
bestimmt (Luhmann, 2003).
2.2 Structure from Motion
Der Prozess Structure from Motion (SfM) beschreibt die Erzeugung von 3D-Oberflächen aus
Bildern unterschiedlicher Perspektiven. Zur Erzeugung der 3D-Oberfäche ist lediglich die Ein-
gabe von sich überlappenden Bildern notwendig. Die Berechnung von 3D-Koordinaten, der
Kamerapositionen und -orientierungen wird automatisch gelöst. Hierzu wird eine hoch redun-
dante und iterative Prozedur der Bündelausgleichung verwendet, die auf automatisch aus den
Bildern extrahierten Features beruht. Features sind Merkmale in Bildern, bestehend aus einer
Position und einer Beschreibung, welche invariant gegenüber Skalierung, Rotation und teils
gegenüber Belichtungsänderungen sind (Westoby et al., 2012). Features können unter anderem
mittels des SIFT-Algorithmus automatisch gefunden und beschrieben werden. Die Beschrei-
bung wird durch Histogramme der Gradienten einer definierten Nachbarschaft des Merkmals
realisiert (Lowe, 2004).
Aus den extrahierten Features werden u.a. die äußere Orientierung der Kameras und die
3D-Koordinaten geschätzt. Hierzu werden die Features über alle Bilder abgeglichen und Verlin-
21Vom Bildverband zum as-built BIM
Abb. 2: Verdeutlichung der äußeren Orientierung anhand von Luhmann (2003) „Koordinatensystem“
kungen, sogenannte Tracks, zwischen gleichen Features und den zugehörigen Bildern erzeugt.
Diese Tracks dienen als Zwang für die anschließende Bündelausgleichung. Das Ergebnis der
Bündelausgleichung ist die Orientierung der Bilder und eine dünne 3D-Punktwolke bestehend
aus den 3D-Koordinaten der Features (Westoby et al., 2012).
Ausgehend vom Ergebnis der Bündelausgleichung erzeugt das Dense Image Matching eine
Verdichtung der bisherigen dünnen Punktwolke. Verschiedene Algorithmen werden in Remon-
dino et al. (2013) vorgestellt. Im Allgemeinen erfolgt eine Zerlegung des Bildverbandes in
Cluster oder Stereopaare, aus denen zunächst einzelne Punktwolken erzeugt und später zu einer
gemeinsamen dichten Punktewolke zusammengefügt werden.
Abb. 3: Allgemeiner Ablauf von Structure from Motion
2228. Forum Bauinformatik
Session 1
3 Der Weg von der Punktwolke zum as-built BIM
Die Erzeugung eines as-built BIM-konformen Modells kann in vier Teilaufgaben gegliedert
werden: Datenaufnahme, Segmentierung, Klassifizierung, Zuordnung. Erläuterungen, aktuel-
le Forschungen und die eigenen Ansätze zur Umsetzung der Aufgaben sollen im Folgenden
dargestellt werden.
Abb. 4: Die vier Teilaufgaben zur Erzeugung eines as-built Modells aus einer 3D-Punktwolke
Datenaufnahme und Datenvorprozessierung
Der erste Schritt ist die Datenaufnahme (siehe Abschnitt 2), welche auch die erste Weiterver-
arbeitung der Daten beinhaltet. Diese kann die Registrierung einzelner Punktwolken sowie die
Ausdünnung und Ausrichtung der Punktwolken umfassen. Die Ausrichtung der Punktwolke hat
das Ziel, die Punktwolke so im Raum zu drehen, dass die Hauptachsen des Gebäudes parallel
zu den Koordinatenachsen des Koordinatensystems der Punktwolke liegen. Dies kann über die
iterative Analyse der Normalen der Punkte einer Punktwolke geschehen (Khosravani, 2016).
Eine weitere hier verwendete Methode ist die Analyse von Schnittbildern mittels einer Hough-
Transformation (Hough, 1962). Es werden Schnittbilder der Punktwolke durch ihre XY-Ebene,
XZ-Ebene und durch ihre YZ-Ebene erzeugt und mittels einer Hough-Transformation Linien
in den Bildern detektiert. Anhand der Winkel α der dominierenden Linien erfolgt eine iterative
Drehung der Punktwolke. Anschließend wird eine höhenmäßige Ausrichtung der Punktwolke
vorgenommen. Dies geschieht über die Auswertung eines Histogramms der Höhenwerte der
Punkte. Die Bodenebene erzeugt das erste lokale Maximum des Histogramms. Die Punktwolke
wird nun so verschoben, dass die Höhenwerte der Bodenpunkte null annehmen. Ein bereits
korrigiertes Histogramm der Höhenwerte eines Raumes ist in Abb. 5 dargestellt.
Segmentierung
Im nächsten Arbeitsschritt erfolgt die Segmentierung der Punktwolke. Diese kann in die grobe
und feine Segmentierung unterteilt werden. In der groben Segmentierung wird zunächst die
Punktwolke in die einzelnen Räume unterteilt. In Macher et al. (2015) wird hierzu ein Binärbild
aus einem Schnittbild der Punktwolke auf Deckenhöhe erzeugt. Das erzeugte Binärbild zeigt
eindeutig die Umrisse der einzelnen Räume ohne Raumübergänge an, sodass die Räume über
ein Region Growing bestimmt werden können. In Ochmann et al. (2014) werden Ebenen in der
Punktwolke erkannt, in die Horizontalebene projiziert und miteinander verschnitten. Die Lö-
sung von Mura et al. (2014) beruht ebenfalls auf der Extraktion von vertikalen Ebenen und der
Projizierung dieser in der Horizontalebene. Zur Lösung der Segmentierung werden die Schnitt-
punkte der projizierten Ebenen über ein angelegtes Raster gewichtet. In Abschnitt 4 Ansatz zur
Segmentierung wird der konzipierte auf Histogrammen basierte Ansatz zur Segmentierung der
Punktwolke durch Detektion von Raumübergängen diskutiert.
In der feinen Segmentierung wird der Raum weiter in seine Bestandteile wie Wände, Decke,
Boden, Fenster und Türen segmentiert. Die Segmentierung von Boden- und Deckenpunkten
23Vom Bildverband zum as-built BIM
kann über die Analyse eines Histogramms der Punkthöhen (siehe Abb. 5) erreicht werden.
Wandsegmente können über die Analyse eines Schnittbildes bestimmt werden (Okorn et al.,
2010). Fenster und Türen können als leere Flächen innerhalb der Wandebenen detektiert werden
(Adan und Huber, 2011).
Abb. 5: Verteilung der Höhenpunkte eines Raumes
Klassifizierung
In der Klassifizierung werden die segmentierten Bestandteile Klassen zugeordnet und somit
mit einer für das as-built Modell notwendigen Semantik versehen. Adan und Huber (2011)
klassifizieren rechteckige Lücken in den Wandebenen mittels Support Vector Machines (SVM)
zu Fenstern und Türen. (Xiong et al., 2013) erweitert diesen Ansatz und nutzt auch die Infor-
mationen von Nachbarschaften zur Klassifizierung. Eine regelbasierte Klassifizierung wird in
Wang et al. (2015) vorgestellt.
Zuordnung
Im Anschluss an die Klassifikation erfolgt die Objektbildung. Hierzu werden die klassifizier-
ten Elemente wieder zu einem Gebäudemodell, im vorliegenden Fall einem bauteilorientierten
Model, zusammengesetzt. Die Ebenen der Wandflächen einzelner Räume werden zu parametri-
schen Volumenmodellen zugeordnet und verschnitten.
4 Ansatz zur Segmentierung
Der konzipierte Ansatz zur Segmentierung beruht auf der Tatsache, dass sich einzelne Räume
durch die Verteilung ihrer Punkte signifikant voneinander abgrenzen. Zusätzlich zur Punktwolke
wird die bekannte Trajektorie der Bewegung bei der Datenaufnahme als weitere Information
genutzt. Die Grundlage des Ansatzes bildet eine Grundrissdarstellung der Punktwolke durch
die Erzeugung eines Schnittbildes in der Horizontalebene.
Im ersten Schritt werden von jeder Aufnahmeposition n kreisförmig angeordnete Zielstrahlen
mit dem erzeugten Schnittbild verschnitten. Die X- und Y-Komponenten der Endpunkte der
2428. Forum Bauinformatik
Session 1
Zielstrahlen werden jeweils in Histogrammen getrennt zusammengefasst. In Abb. 6 ist dies
beispielhaft für 20 Zielstrahlen und dem dazugehörigen Histogramm der X-Werte dargestellt.
Abb. 6: Verschneidung der Zielstrahlen (links); Histogramm der X-Werte (rechts)
Für die Robustheit gegenüber Ausreißern, welche aufgrund der Streuung der Punktwolke
sowie Tür- oder Fensteröffnungen entstehen können, wird nur ein Bereich betrachtet in dem
50% der Werte liegen. Hierzu werden die beiden Verteilungen der X- und Y-Werte durch
statistische Lagemaße beschrieben. Diese werden durch die Quartile Q1 und Q3 realisiert.
Sequentiell werden die Quartile der einzelnen Aufnahmepositionen analysiert und überein-
stimmende Histogramme zu einem Raumhistogramm addiert. Stimmt das Histogramm der ak-
tuellen Position mit dem Raumhistogramm der bisherigen Positionen ausreichend überein, wird
das Histogramm der aktuellen Position zu dem Raumdiagramm addiert und mit der nächsten
Position fortgefahren. Übersteigt die Differenz zwischen aktuellem Histogramm und Raumdia-
gramm einen definierten Schwellenwert, wird das Abbruchkriterium erreicht. An dieser Stelle
wird ein Raumübergang detektiert und ein neuer Raum begonnen. Die Wahl des Abbruchkri-
teriums ist somit entscheidend für die erfolgreiche Detektion von Raumübergängen. Für die
Quartile Q1 und Q3 werden Konfidenzintervalle festgelegt. Der Bereich wird definiert über
den Interquartilsabstand und einem Maßstab m, welcher den Bereich skaliert und maßgeblich
die Schärfe der Trennung steuert. Erfahrungen aus verschiedenen Testdaten zeigen, dass für m
Werte zwischen 0,5 und 0,8 gute Ergebnisse liefern.
[Q1Raum − InterquartilsabstandRaum · m, Q1Raum + InterquartilsabstandRaum · m] (1)
Das Ergebnis der Segmentierung ist eine nach Räumen aufgeteilte Punktwolke. Zusätzlich
werden auch die Raumübergänge näherungsweise bestimmt und die Aufnahmepositionen den
Räumen zugeordnet
5 Ergebnisse
Getestet wurde der Ansatz in einem Szenario von drei benachbarten Büroräumen, welche über
zwei Türöffnungen miteinander verbunden sind. Die durch SfM erzeugte Punktwolke wurde
aus 138 Aufnahmen gerechnet. In Abbildung 7 ist die erzeugte Punktwolke und die während
der Aufnahme zurückgelegte Trajektorie im Schnittbild dargestellt.
Für die Segmentierung wurden 200 Zielstrahlen pro Kameraposition genutzt und der Maß-
stab m mit 0,6 festgesetzt. In Abb. 8 ist das Ergebnis der Segmentierung, die bestimmten
25Vom Bildverband zum as-built BIM
Abb. 7: erzeugte Punktwolke (links), Trajektorie der Aufnahme (rechts)
Raumhistogramme sowie das Schnittbild mit den eingefärbten Schnittpunkten, dargestellt. Die
Histogramme liefern eine eindeutige Beschreibung der Räume, obwohl die Punktwolke teils
verrauscht ist. Anhand der Histogramme kann so schon ein stark vereinfachtes Modell der
Räume erzeugt werden.
Abb. 8: Vereinfachtes Modell (links), Raumhistogramme und eingefärbte Schnittpunkte (rechts)
In Abb. 9 sind die detektierten Raumübergänge aufgetragen, mit rot für die letzte Kamerapo-
sition und grün für die erste Kameraposition eines Raumes. Anhand dieser Positionen ist eine
erste Approximation der Raumübergänge möglich.
Abb. 9: Detektierte Räumübergänge (rot = letzte Position, grün = erste Position)
2628. Forum Bauinformatik
Session 1
6 Zusammenfassung und Ausblick
Die Ergebnisse zeigen, dass sich über den konzipierten Ansatz eine Punktwolke in Räume
aufteilen lässt und Raumübergängen ungefähr lokalisiert werden können. Zukünftig wird der
konzipierte Ansatz hinsichtlich der Robustheit und der Flexibilität für komplexere Aufnah-
mesituationen weiterentwickelt. Auch ist die Kombination mit anderen bereits bestehenden
Methoden denkbar. Zudem soll der Ansatz in Bezug auf die Kompatibilität mit anderen mobi-
len Aufnahmeverfahren, z.B. das mobile Laserscanning oder eine Plattform wie das Google
Tango, getestet werden.
Literatur
Adan, A. und Huber, D. (2011). „3D reconstruction of interior wall surfaces under occlusion and clutter“.
In: 2011 International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmis-
sion. IEEE, S. 275–281.
Blankenbach, J. (2015). „Bauwerksvermessung für BIM“. In: Building Information Modeling - Technolo-
gische Grundlagen und industrielle Praxis. Springer, S. 247–254.
Braunes, J. (2014). „Von der Punktwolke zum Building Information Model (BIM) Konsequenzen und
Wege für die Bestandserfassung“. In: VDVmagazin, S. 132–136.
Hough, P. V. (1962). Method and means for recognizing complex patterns. Techn. Ber.
Khosravani, A. M. (2016). „Automatic modeling of building interiors using low-cost sensor systems“.
Diss. University of Stuttgart.
Lowe, D. G. (2004). „Distinctive image features from scale-invariant keypoints“. In: International journal
of computer vision 60.2, S. 91–110.
Luhmann, T. (2003). Nahbereichsphotogrammetrie: Grundlagen, Methoden und Anwendungen. Wich-
mann.
Macher, H., Landes, T. und Grussenmeyer, P. (2015). „Point clouds segmentation as base for as-built BIM
creation“. In: ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences
2.5, S. 191–197.
Mura, C., Mattausch, O., Villanueva, A. J., Gobbetti, E. und Pajarola, R. (2014). „Automatic room detec-
tion and reconstruction in cluttered indoor environments with complex room layouts“. In: Computers
& Graphics 44, S. 20–32.
Ochmann, S., Vock, R., Wessel, R., Tamke, M. und Klein, R. (2014). „Automatic generation of structural
building descriptions from 3d point cloud scans“. In: Computer Graphics Theory and Applications
(GRAPP), 2014 International Conference on. IEEE, S. 1–8.
Okorn, B., Xiong, X., Akinci, B. und Huber, D. (2010). „Toward automated modeling of floor plans“. In:
Proceedings of the symposium on 3D data processing, visualization and transmission. Bd. 2.
Remondino, F., Spera, M. G., Nocerino, E., Menna, F., Nex, F. und Gonizzi-Barsanti, S. (2013). „Dense
image matching: comparisons and analyses“. In: IEEE). Bd. 1, S. 47–54.
Volk, R., Stengel, J. und Schultmann, F. (2014). „Building Information Modeling (BIM) for existing
buildings—Literature review and future needs“. In: Automation in construction 38, S. 109–127.
Wang, C., Cho, Y. K. und Kim, C. (2015). „Automatic BIM component extraction from point clouds of
existing buildings for sustainability applications“. In: Automation in Construction 56, S. 1–13.
27Vom Bildverband zum as-built BIM Westoby, M., Brasington, J., Glasser, N., Hambrey, M. und Reynolds, J. (2012). „Structure-from-Motion photogrammetry: A low-cost, effective tool for geoscience applications: A low-cost, effective tool for geoscience applications“. In: Geomorphology 179, S. 300–314. Xiong, X., Adan, A., Akinci, B. und Huber, D. (2013). „Automatic creation of semantically rich 3D building models from laser scanner data“. In: Automation in Construction 31, S. 325–337. 28
Sie können auch lesen