Aktuator LA36 Montageanleitung - LINAK
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Aktuator LA36 Montageanleitung LINAK.DE/TECHLINE LINAK.AT/TECHLINE
Inhalt
Vorwort................................................................................................................................................4
LINAK Richtlinie für Anwendungsmöglichkeiten....................................................................................5
Kapitel 1............................................................................................................................................6
Sicherheitshinweise...............................................................................................................................6
Kapitel 2............................................................................................................................................8
Montagehinweise.................................................................................................................................8
Verkabelung.......................................................................................................................................10
Elektrische Anschlüsse.........................................................................................................................11
Empfohlene Sicherung für Aktuatoren ohne integrierte Steuerung..............................................11
Antrieb ohne Rückmeldung.........................................................................................................12
Antrieb mit Endstopp-Signalausgang...........................................................................................13
Antrieb mit relativer Rückmeldung – Dual Hall.............................................................................15
Antrieb mit Endstoppsignalen und relativer Rückmeldung – Dual Hall..........................................17
Antrieb mit relativer Rückmeldung – Einzel-Hall...........................................................................19
Antrieb mit Endstoppsignalen und relativer Rückmeldung – Einzel-Hall........................................22
Antrieb mit absoluter Rückmeldung – Analoge Rückmeldung......................................................24
Antrieb mit Endstoppsignalen und absoluter Rückmeldung –
Analoge Rückmeldung................................................................................................................26
Antrieb mit absoluter Rückmeldung – Rückmeldung mechanisches Potentiometer.......................28
Antrieb mit Endstoppsignalen und absoluter Rückmeldung –
Rückmeldung mechanisches Potentiometer.................................................................................30
Antrieb mit absoluter Rückmeldung – PWM................................................................................32
Antrieb mit Endstoppsignalen und absoluter Rückmeldung – PWM.............................................34
Antrieb mit IC Basic.....................................................................................................................36
Antrieb mit IC Advanced – mit Rückmeldung und Endstoppsignal...............................................38
Korrekter Anschluss von Strom-GND und Signal-GND für IC Basic und IC Advanced............................41
Übersicht IC Optionen.........................................................................................................................42
Rückmeldekonfigurationen für IC Basic, IC Advanced und Parallel.......................................................43
Parallelantriebe...................................................................................................................................46
Das Parallelsystem...............................................................................................................................49
Das BusLink Software-Tool und Parallelsystem.....................................................................................50
Das Parallelsystem...............................................................................................................................50
Parallelsystemüberwachung................................................................................................................51
Anpassung des Parallelantriebssystems................................................................................................51
Wiederherstellungsmodus...........................................................................................................52
Parallelfunktion - manueller Servicemodus...................................................................................53
Aktuator mit CAN-Bus (J1939)....................................................................................................54
Aktuator mit CANopen...............................................................................................................56
System-Kombinationsmöglichkeiten für LA36 IC Advanced.........................................................58
TECHLINE Signalkabel.................................................................................................................58
Seite 2 von 100
© 2021 LINAK A/S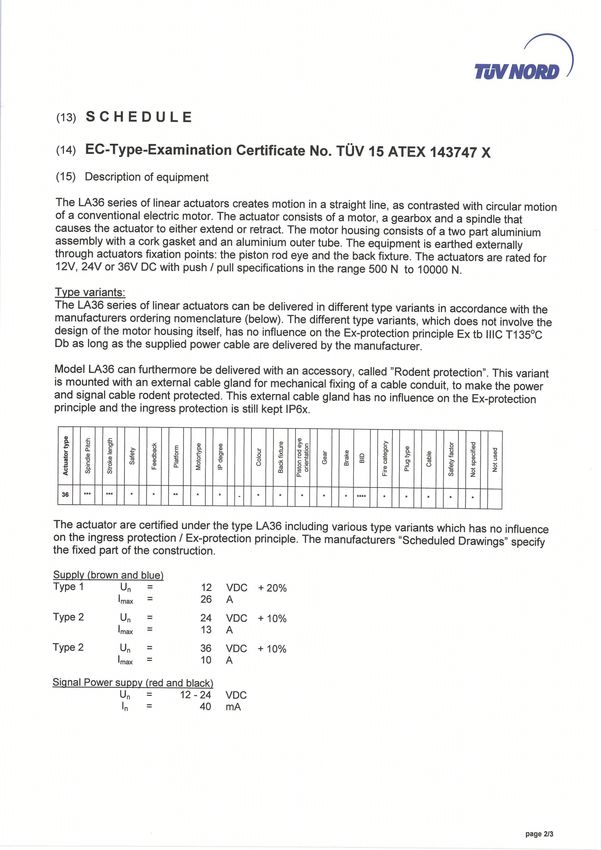
Kapitel 3..........................................................................................................................................59
Fehlerbehebung..................................................................................................................................59
Fehlerbehebung für Parallelantriebe....................................................................................................61
BusLink Servicezähler – Ursache für letzten Stopp...............................................................................63
Kapitel 4..........................................................................................................................................64
Technische Daten................................................................................................................................64
Abmessungen Aktuator......................................................................................................................65
Einbaumaße........................................................................................................................................66
Manuelle Bedienung (Notbetätigung)..................................................................................................67
Geschwindigkeits- und Stromdiagramme............................................................................................68
12 V Motor.................................................................................................................................68
24 V Motor.................................................................................................................................69
36 V Motor.................................................................................................................................70
48 V Motor.................................................................................................................................71
Etikett für LA36..................................................................................................................................72
Symbolerläuterungen..........................................................................................................................73
LA36 Bestellbeispiel Econ....................................................................................................................74
LA36 Bestellbeispiel 15-stellig.............................................................................................................76
Kapitel 5..........................................................................................................................................77
Wartung.............................................................................................................................................77
Reparaturen........................................................................................................................................77
Hauptentsorgungsgruppen.................................................................................................................77
Original Konformitätserklärung...........................................................................................................78
Konformitätserklärung Übersetzung ins Deutsche...............................................................................79
Original Erklärung für den Einbau einer unvollständigen Maschine......................................................86
Erklärung für den Einbau einer unvollständigen Maschine – Übersetzung ins Deutsche:......................87
Kapitel 6..........................................................................................................................................88
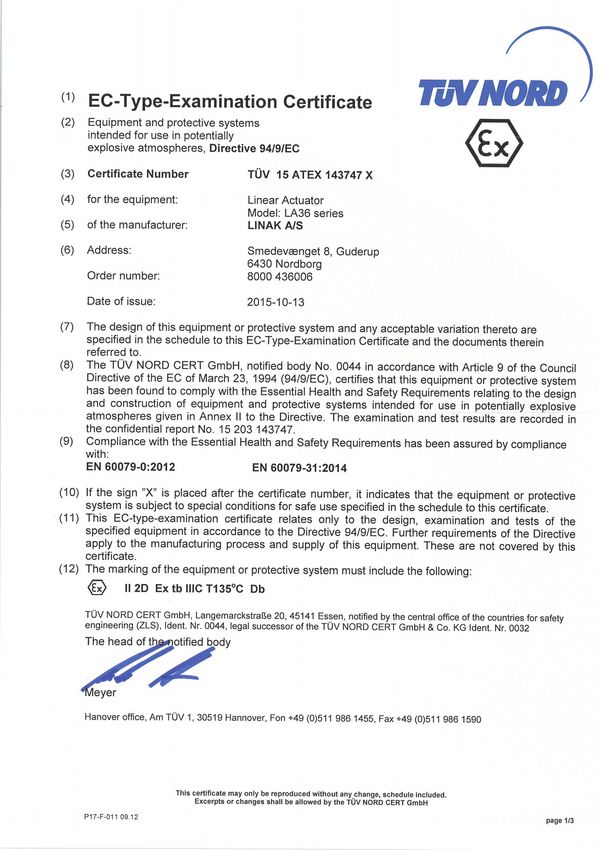
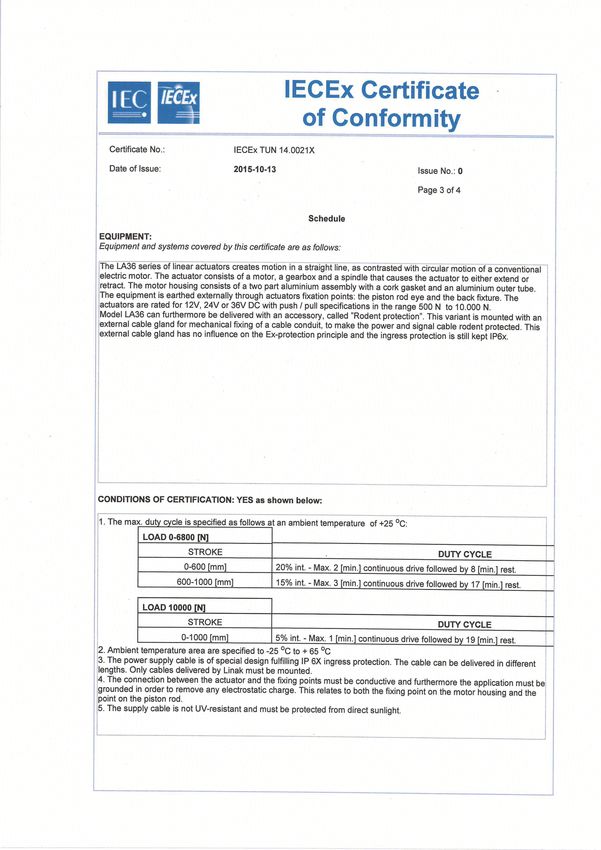
IECEx/ATEX.........................................................................................................................................88
Montage und Austausch von ATEX-Kabeln..................................................................................90
Austausch eines ATEX-Kabels......................................................................................................91
IECEx / ATEX Zertifikate.......................................................................................................................93
Adressen...........................................................................................................................................100
Seite 3 von 100
© 2021 LINAK A/S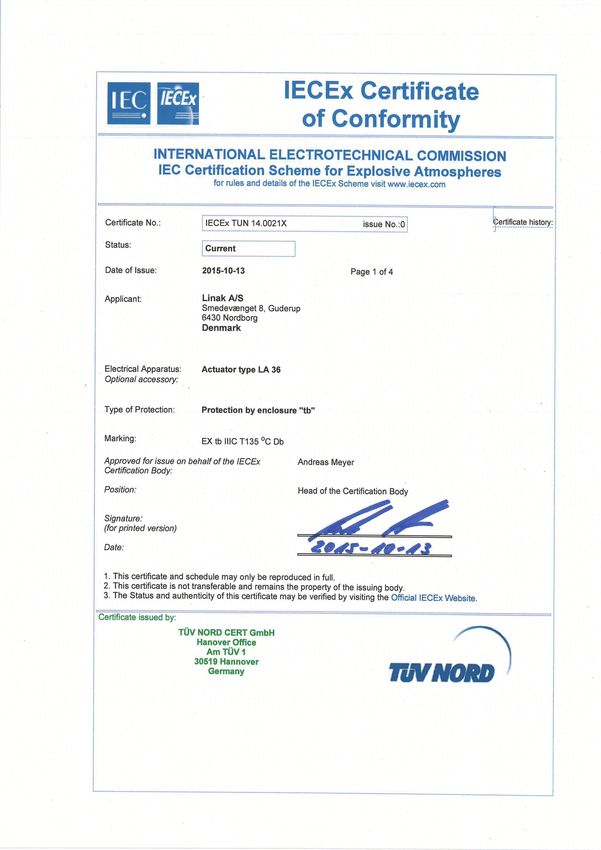
Vorwort
Sehr geehrter Nutzer,
wir freuen uns, dass Sie ein Produkt von LINAK® gewählt haben.
LINAK Systeme sind High-Tech Produkte, basierend auf jahrelanger Erfahrung in der Herstellung und Entwicklung
von Aktuatoren, elektrischen Steuereinheiten, Bedienelementen und Ladegeräten.
Diese Montageanleitung ist nicht an den Endanwender gerichtet. Sie dient lediglich als Informationsquelle für
den Geräte- oder Systemhersteller und erklärt Ihnen, wie Ihr LINAK Produkt eingebaut, benutzt und gewartet
wird. Es liegt in der Verantwortung des Herstellers, dem Endanwender eine Bedienungsanleitung mit relevanten
Sicherheitshinweisen aus dieser Montageanleitung zu liefern.
Wir sind sicher, dass Ihr LINAK Produkt/System problemfrei funktioniert. Bevor unsere Produkte das Werk ver-
lassen, werden sie einem kompletten Funktions- und Qualitätstest unterzogen. Sollten Sie dennoch Probleme
mit Ihrem LINAK Produkt/System haben, können Sie jederzeit Ihre LINAK Niederlassung kontaktieren. LINAK
Niederlassungen und Vertriebsgesellschaften auf der ganzen Welt haben autorisierte Service-Zentren, die immer
bereit sind, Ihnen zu helfen.
LINAK bietet eine Gewährleistung auf alle Produkte. Diese ist abhängig von der korrekten Nutzung (entsprechend
den Spezifikationen), korrekter Wartung und Reparatur, die von einem autorisierten Service-Zentrum ausgeführt
wurde.
Änderungen bei der Installation und Anwendung der LINAK Produkte/Systeme können die Bedienung und Lebens-
dauer beeinflussen. Die Produkte dürfen nicht von unbefugten Personen geöffnet werden.
Diese Montageanleitung wurde auf Grundlage unserer derzeitigen technischen Kenntnisse geschrieben. Wir
arbeiten ständig an der Aktualisierung der Informationen und behalten uns daher das Recht vor, technische
Änderungen durchzuführen.
LINAK A/S
Seite 4 von 100
© 2021 LINAK A/S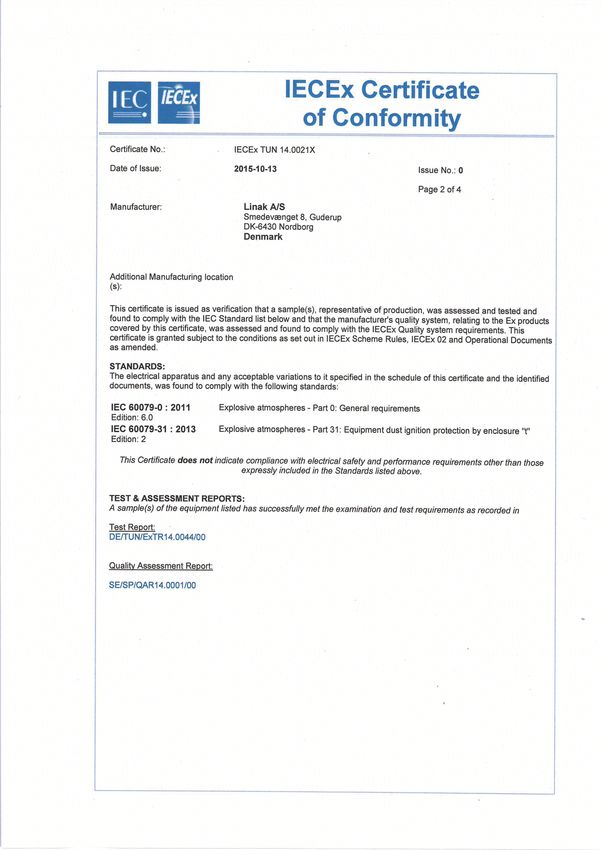
LINAK Richtlinie für Anwendungsmöglichkeiten
Das Ziel der Richtlinien für Anwendungsmöglichkeiten ist es, Verantwortlichkeitsbereiche in Bezug auf die Ver-
wendung eines LINAK Produkts (definiert als Hardware, Software, technische Beratung etc.) festzulegen, die in
Relation zu einer bestehenden Anwendung oder zu einer Anwendung eines Neukunden stehen.
LINAK Produkte, wie oben festgelegt, sind in zahlreichen Bereichen einsetzbar, wie z. B. im Medizin-, Komfortmö-
bel-, Büromöbel- und Industriebereich. LINAK kann jedoch nicht alle Bedingungen kennen unter denen die LINAK
Produkte eingebaut, verwendet und bedient werden, da jede Anwendung einzigartig ist.
Die Eignung und Funktionalität der LINAK Produkte sowie deren Leistungsfähigkeit unter verschiedenen Bedin-
gungen (Anwendung, Vibration, Belastung, Luftfeuchtigkeit, Temperatur, Frequenz etc.) kann nur durch einen Test
nachgewiesen werden und sollte letztendlich in der Verantwortlichkeit des Kunden liegen, der ein LINAK Produkt
einsetzt.
LINAK sollte lediglich für die Übereinstimmung der LINAK Produkte mit den von LINAK angegebenen Spezifikati-
onen verantwortlich sein. Es sollte in der Verantwortung des Kunden liegen, sicherzustellen, dass das spezifische
LINAK Produkt in der in Frage kommenden Anwendung eingesetzt werden kann.
Seite 5 von 100
© 2021 LINAK A/S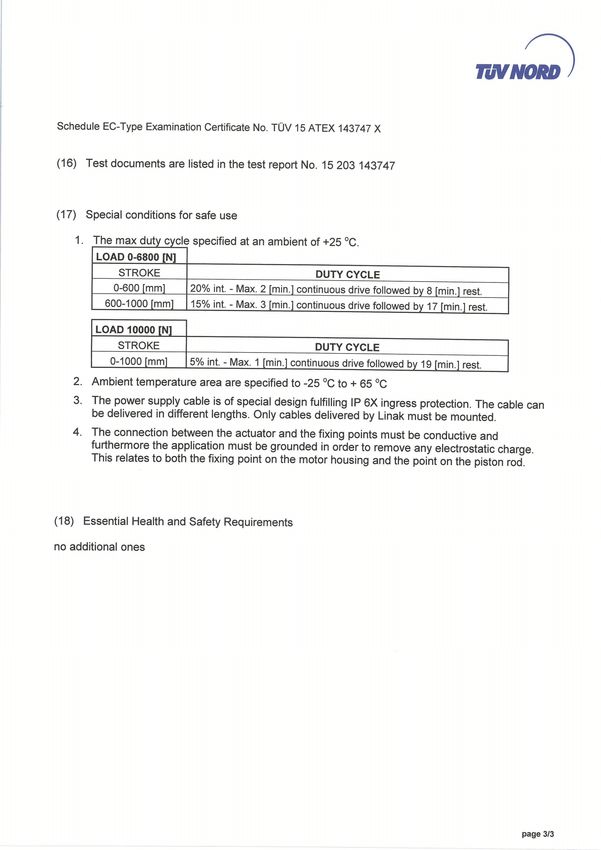
Kapitel 1
Sicherheitshinweise
Bitte lesen Sie die nachfolgenden Informationen sorgfältig durch:
Bitte beachten Sie die folgenden drei Symbole in dieser Montageanleitung:
Achtung!
Nichtbeachtung der genannten Anweisungen kann zu Unfällen mit ernsten Personenschäden führen.
Empfehlung
Nichtbeachtung der genannten Regeln kann zur Beschädigung oder Zerstörung des Aktuators führen.
Zusätzliche Informationen
Nützliche Tipps oder zusätzliche Informationen, die in Zusammenhang mit dem Gebrauch des Aktuators
wichtig sind.
Jeder, der das System anschließt, montiert und nutzt, muss Zugang zu dieser Montageanleitung sowie allen
notwendigen Informationen haben.
Personen, die nicht die nötige Erfahrung oder ausreichend Kenntnis von dem Produkt/den Produkten haben, dürfen diese
nicht benutzen. Körperlich und geistig behinderte Personen dürfen das Produkt nicht verwenden, sofern sie nicht beauf-
sichtigt werden oder eine gründliche Einweisung zur Nutzung der Geräte durch eine Person erhalten haben, die für die
Sicherheit dieser Personen verantwortlich ist.
(Kleine) Kinder müssen beaufsichtigt werden, um sicher zu gehen, dass sie nicht mit dem Gerät spielen.
Vor der Montage/Demontage müssen folgende Punkte beachtet werden:
• Stoppen Sie den Aktuator.
• Entlasten Sie den Antrieb von jeglichem Gewicht.
Vor der Inbetriebnahme überprüfen Sie bitte folgendes:
• Der Aktuator muss, wie in der entsprechenden Montageanleitung angegeben, korrekt montiert sein.
• Die Anlage kann frei über dem gesamten Arbeitsbereich des Aktuators bewegt werden.
• Der Antrieb ist an eine Stromversorgung/einen Transformator mit korrekter Spannung angeschlossen, die für
den betreffenden Antriebstyp gemessen wurde und passend ist.
• Vergewissern Sie sich, dass die angewandte Spannung mit der auf dem Etikett des Aktuators angegebenen
Spannung übereinstimmt.
• Vergewissern Sie sich, dass die Anschlussbolzen der Beanspruchung standhalten können.
• Vergewissern Sie sich, dass die Anschlussbolzen gesichert sind.
Seite 6 von 100
© 2021 LINAK A/S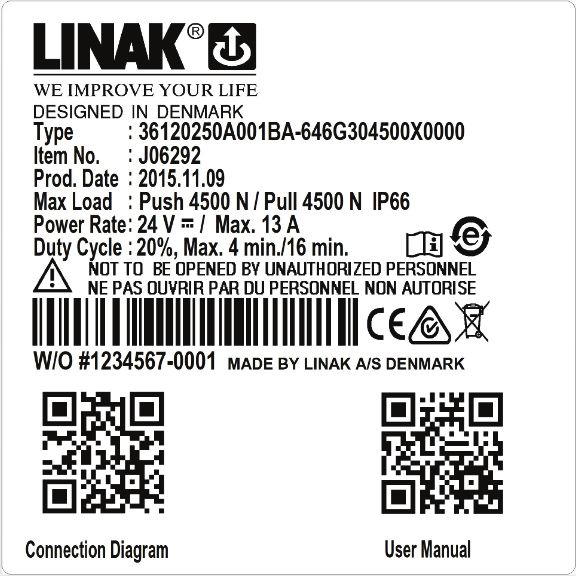
Während des Betriebs beachten Sie bitte folgendes:
• Stoppen Sie den Aktuator umgehend, wenn Sie ungewöhnliche Geräusche hören, einen unruhigen Lauf fest-
stellen oder Ähnliches bemerken.
• Es darf keine Seitenbelastung auf den Antrieb wirken.
• Verwenden Sie den Aktuator nur innerhalb der vorgegebenen Betriebstoleranzen.
• Treten Sie nicht gegen den Antrieb.
Wenn die Geräte nicht in Betrieb sind:
• Schalten Sie die Stromzufuhr ab oder ziehen Sie den Netzstecker, um eine unbeabsichtigte Bedienung zu
vermeiden.
• Überprüfen Sie in regelmäßigen Abständen den Aktuator auf Verschleißerscheinungen.
Klassifizierung:
Die Geräte dürfen nicht in Gegenwart von entflammbaren Gemischen mit Luft, Sauerstoff oder Stickoxiden ein-
gesetzt werden.
Warnhinweise
• Es darf keine Seitenbelastung auf den Antrieb wirken.
• Stellen Sie bei der Montage des LA36 sicher, dass die Bolzen der Beanspruchung standhalten und sicher
befestigt sind.
• Wenn Sie Unregelmäßigkeiten feststellen, muss der Aktuator ausgetauscht werden.
Empfehlungen
• Legen Sie keine Lasten auf dem Gehäuse des Antriebs ab und vermeiden Sie Schläge oder Stöße bzw. andere
Belastungen auf das Gehäuse.
• Stellen Sie sicher, dass die Kabelabdeckung ordnungsgemäß montiert ist. Verwenden Sie dabei ein Drehmoment
von 3,5 Nm.
• Stellen Sie sicher, dass die Vorgaben zu Einschaltdauer und Betriebstemperatur des LA36-Antriebs eingehalten
werden.
• Stellen Sie sicher, dass die Verkabelung nicht gequetscht, gezogen oder sonstigen Belastungen ausgesetzt
werden kann.
• Zudem sollte der Antrieb stets vollständig in die Ausgangsposition zurückgefahren werden, da sich im ausge-
fahrenen Zustand ein Vakuum im Antrieb bildet und dadurch im Laufe der Zeit Wasser eindringen kann.
• Wenn der Aktuator (ohne integrierte Steuerung) in einer Anwendung montiert ist, in der ein mechanischer
Endstopp verhindert, dass die Endschalter im Aktuator aktiviert werden, muss der Aktuator mit einer elektri-
schen Sicherheitsvorrichtung (Stromüberwachung) oder externen Endschaltern ausgestattet werden.
Seite 7 von 100
© 2021 LINAK A/S
Kapitel 2
Montagehinweise
LINAK® Linearantriebe können schnell und einfach montiert werden. Die Aufnahmen des Antriebs müssen ledig-
lich über Bolzen mit den vorhandenen Beschlägen im Maschinenrahmen verbunden werden.
Die Montagebolzen müssen parallel zueinander stehen (siehe Abb. 1). Bolzen, die nicht parallel zueinander ste-
hen, können den Aktuator durch seitliche Krafteinwirkung zerstören.
Die Krafteinwirkung muss parallel zur Hubachse des Aktuators verlaufen, da sonst durch auftretende Biegekräfte
der Antrieb zerstört werden kann (siehe Abb. 2).
Versichern Sie sich, dass die Montagebolzen an beiden Enden befestigt sind. Montagefehler können die Lebens-
dauer des Antriebs verringern. Vermeiden Sie außerdem eine Schrägbelastung des Antriebs.
Der Aktuator kann sich um die Achspunkte am vorderen und hinteren Ende bewegen. In diesem Fall ist es sehr
wichtig, dass sich der Aktuator über die komplette Hublänge frei bewegen kann! Bitte achten Sie besonders dar-
auf, dass in dem Bereich rund um das Gehäuse keine Teile eingeklemmt und dadurch Schäden an der Applikation
oder dem Aktuator verursacht werden können.
Bei Anwendungen mit hohen dynamischen Kräften empfiehlt LINAK, die komplett ausgefahrene oder eingefah-
rene Position nicht über eine längere Zeit zu halten, da dies das Endstopp-System dauerhaft schädigen kann.
X
Abbildung 1
1 2 3 4 5 X 6 7 8 9
A A
B B
C C
D D
Abbildung 2 Richtig Falsch Falsch Falsch
E E
Bitte beachten Sie, dass, wenn der LA36 für Solaranwendungen genutzt wird, der Antrieb mit nach oben
gerichtetem Motorgehäuse und nach unten zeigenden Drähten montiert werden muss.
F
Seite 8 von 100
© 2021 LINAK A/S
Montagehinweise
• Die Montagebolzen müssen in der richtigen Größe vorliegen.
• Bolzen und Muttern müssen aus hochwertigem Stahl gefertigt sein (beispielsweise 10.8). Es dürfen sich
weder Gewinde am Bolzen in der hinteren Aufnahme noch am Kolbenstangenauge befinden.
• Schrauben und Muttern müssen so fest angezogen werden, dass sie sich nicht lösen können.
• Verwenden Sie jedoch bei den Schrauben an der hinteren Aufnahme und am Kolbenstangenauge kein
zu hohes Drehmoment, da sonst die Aufnahmen unnötig belastet werden.
Hinweis:
Das Kolbenstangenauge darf nur in einem Bereich zwischen 0 und 90 Grad gedreht werden.
Anweisungen zur Drehung des Kolbenstangenauges und des Innenrohres:
• Bei der Montage und Inbetriebnahme darf das Kolbenstangenauge nicht übermäßig stark gedreht
werden. Wenn sich das Auge nicht in der gewünschten Position befindet, kann es zunächst mit einem
maximalen Drehmoment von 2 Nm in die unterste Stellung (1) und anschließend mit maximal 90°
030618/D S
wieder nach draußen gedreht werden (2).
Instruktion vedr. uddrejning af inderrør – LA27 + LA27C
• Da das Kolbenstangenauge frei beweglich ist, muss geprüft werden, dass das Auge nicht rotieren
Til salesbackup, brugsanvisning og datablad.
kann, wenn der Aktuator in einer
Ved montage Zug-Applikation
og ibrugtagning, er det ikkeilladt
t verwendet
at dreje wird.
unødvendigt mange gangeIn
på diesem Fall wird der Aktuator
auseinander gezogen und zerstört.
stempelstangsrøret. Hvis øjetikke er positioneret korrekt, erdet tilladt først at skrue
røret i bund (1), og derefter skrue det maksimalt ½ omgang ud igen (2).
Achtung!
Wenn der Antrieb bei Anwendungen auf Zug eingesetzt wird, in denen es zu Personenschä-
den kommen kann, ist Folgendes zu beachten:
Es liegt in der Verantwortung des Herstellers, geeignete Sicherheitsmaßnahmen zu ergreifen, die bei
Ausfall des Antriebs Personenschäden verhindern.
Achtung!
Antriebe von LINAK eignen sich nicht für folgende Anwendungsbereiche:
• Offshore-Installation
• Flugzeuge und andere Fluggeräte
• Kernkraft
Seite 9 von 100
© 2021 LINAK A/S
Verkabelung
1. Schrauben Sie die Abdeckung ab 2. Stecken Sie das Versorgungs- 3. Schieben Sie die Abdeckung
und entfernen Sie die entspre- und/oder Signalkabel ein. auf den Antrieb.
chenden Blindstopfen.
Das Drehmoment der Schrau-
be für die Abdeckung beträgt
3,5 Nm +/- 0,3 Nm.
TORX 25IP
Anmerkung: Wenn Sie die Kabel an einem LINAK Aktuator tauschen, müssen Sie darauf achten, dass
die Stecker und Pins nicht beschädigt werden. Bevor das neue Kabel montiert wird, empfehlen wir, die
Buchse mit Vaseline einzufetten, um den hohen IP-Schutz zu erhalten und eine einfache Montage zu
gewährleisten. Vergewissern Sie sich, dass die Kabel in die richtige Buchse eingesteckt und fest sind,
bevor die Abdeckung montiert wird.
Bitte beachten Sie, dass, wenn die Kabel mehr als dreimal montiert und demontiert wurden, die Stifte
beschädigt sein können. In diesem Fall empfehlen wir, die Kabel auszutauschen und zu vernichten.
Beachten Sie, dass das Kabel nicht zum Tragen des Aktuators genutzt wird.
Wir empfehlen als Vorsichtsmaßnahme die Kabelverbindung so zu konstruieren, daß sich das Kabelen-
de innerhalb eines geschlossenen und geschützten Bereichs befindet, um die hohe IP-Schutzklasse zu
gewährleisten.
NICHT GÜLTIG FÜR ATEX-KABEL. BITTE BEACHTEN SIE KAPITEL 6
Seite 10 von 100
© 2021 LINAK A/SElektrische Anschlüsse
• Um die maximale Selbstsperrkraft zu erhalten, versichern Sie sich, dass der Motor nach dem Halten
kurzgeschlossen ist. Bei Aktuatoren mit integrierter Steuerung ist diese Option im Aktuator verfügbar,
solange der Aktuator an Spannung angeschlossen ist.
• Bei der Verwendung von Soft-Stopp an einem DC-Motor wird ein kurzer Peak mit höherer Spannung
zurück zur Stromversorgung gesendet. Es ist wichtig bei der Auswahl der Stromversorgung, dass diese
nicht die Leistung abschaltet, wenn diese umgekehrte Lastspitze auftritt.
Die Stromversorgung für Aktuatoren ohne integrierte Steuerung muss extern überwacht und im Falle
einer Überlastung unterbrochen werden.
Empfohlene Sicherung für Aktuatoren ohne integrierte Steuerung
Typ Spindel- max. Kraft Typ. Stromaufnahme bei Empfohlene Sicherung
steigung Druck/Zug Volllast
[mm] [N] [A]
48 V 36 V 24 V 12 V 48 V 36 V 24 V 12 V
36080xxxxxxAxxxxH... 8 6.800 - - - 17,0 - - - 40,0
36120xxxxxxAxxxxF... 12 2.600 - - - 21,0 - - - 40,0
36120xxxxxxAxxxxG... 12 4.500 - - - 20,7 - - - 40,0
36120xxxxxxAxxxxH... 12 6.800 - - - 21,0 - - - 40,0
36200xxxxxxAxxxxF... 20 1.700 - - - 22,0 - - - 40,0
36200xxxxxxAxxxxE... 20 500 - - - 20,0 - - - 40,0
36080xxxxxxBxxxxH... 8 6.800 - - 8,0 - - - 20,0 -
36120xxxxxxBxxxxF... 12 2.600 - - 10,4 - - - 20,0 -
36120xxxxxxBxxxxG... 12 4.500 - - 10,2 - - - 20,0 -
36120xxxxxxBxxxxH... 12 6.800 - - 10,3 - - - 20,0 -
36200xxxxxxBxxxxF... 20 1.700 - - 10,3 - - - 20,0 -
36200xxxxxxBxxxxE... 20 500 - - 10,0 - - - 20,0 -
36080xxxxxxCxxxxH... 8 6.800 - 6,5 - - - 16,0 - -
36120xxxxxxCxxxxF... 12 2.600 - 8,0 - - - 16,0 - -
36120xxxxxxCxxxxG... 12 4.500 - 8,0 - - - 16,0 - -
36120xxxxxxCxxxxH... 12 6.800 - 8,0 - - - 16,0 - -
36200xxxxxxCxxxxF... 20 1.700 - 8,0 - - - 16,0 - -
36200xxxxxxCxxxxE... 20 500 - 8,0 - - - 16,0 - -
36080xxxxxxDxxxxH... 8 6.800 5,5 - - - 10,0 - - -
36120xxxxxxDxxxxF... 12 2.600 7 - - - 10,0 - - -
36120xxxxxxDxxxxG... 12 4.500 7 - - - 10,0 - - -
36120xxxxxxDxxxxH... 12 6.800 7 - - - 10,0 - - -
36200xxxxxxDxxxxF... 20 1.700 7 - - - 10,0 - - -
36200xxxxxxDxxxxE.... 20 500 7 - - - 10,0 - - -
Seite 11 von 100
© 2021 LINAK A/SAntrieb ohne Rückmeldung
Anschlussdiagramm:
Without feedback
36XXXXXXX000XX-XXXXXXXXXXXXXXX
Abb. 1: 36xxxxx00/10xxxxxx
36xxxxxxx000xx-xxxxxxxxxxxxxxx
36XXXX+10XXXXXX
37XXXX+10XXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
6P
2
3 1
4
6
5
I/O Werte:
Eingang/Ausgang Spezifikation Kommentare
Beschreibung Permanentmagnet DC Motor
Siehe Anschlussdiagramm,
Abb. 1 oben
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ±10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Nicht anschließen
Schwarz Nicht anschließen
Grün Nicht anschließen
Gelb Nicht anschließen
Violett Nicht anschließen
4
2020 © LINAK A/S
Weiß Nicht anschließen
Seite 12 von 100
© 2021 LINAK A/SAntrieb mit Endstopp-Signalausgang
Anschlussdiagramm:
Endstop signal output
Abb. 2: 36xxxxx20xxxxxx
36XXXXXXX000XX-XXXXXXXXXXXXXXX
36xxxxxxx000xx-xxxxxxxxxxxxxxx
36XXXX+20XXXXXX
37XXXX+20XXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
+
ROT 2 2
GELB 5 5
GRÜN 6 6
SCHWARZ 1 1
-
6P 6P 6P
2
AMP DEUTSCH
3 1
4
6
5
*YELLOW/GREEN: Endstop signals out are NOT potential free!
If you wish to use the endstop signals, you will have to keep power on the brown,
blue, red and black wires, otherwise the signal will be lost.
*GELB/GRÜN: Endstoppsignale sind NICHT potenzialfrei.
Wenn Sie die Endstoppsignale verwenden möchten, müssen Sie die rote und schwarze Leitung mit Spannung
versorgen, da sonst das Signal verloren geht.
Seite 13 von 100
© 2021 LINAK A/SAntrieb mit Endstopp-Signalausgang
I/O Werte:
Eingang/Ausgang Spezifikation Kommentare
Beschreibung Der Antrieb kann mit elektronisch gesteuerten
Endstoppsignalen ausgestattet werden.
IN
Siehe Anschlussdiagramm, OUT
Abb. 2 Seite 13
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ±10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Stromversorgung Signal (+) 12-36 V DC Stromverbrauch:
Max. 40 mA, auch wenn der Antrieb nicht
Schwarz Signalstromversorgung-GND (-) in Betrieb ist
Grün Endstopp-Signalausgang ausgefahren Ausgangsspannung min. VIN - 2 V
Max. Ausgangsstrom = 100 mA
Gelb Endstopp-Signalausgang eingefahren NICHT potenzialfrei
Violett Nicht anschließen
Weiß Nicht anschließen
Wenn Sie die Endstoppsignale verwenden möchten, müssen Sie die Spannung an den braunen, blauen,
roten und schwarzen Drähten beibehalten, da sonst das Signal verloren geht.
Seite 14 von 100
© 2021 LINAK A/SAntrieb mit relativer Rückmeldung – Dual Hall
Relative positioning - Dual hall
Anschlussdiagramm:
36XXXXXXXH00XX-XXXXXXXXXXXXXXXX
Abb. 3: 36xxxxx0H/1Hxxxxxx
36XXXX+0H/1HXXXXXX
36xxxxxxxH00xx-xxxxxxxxxxxxxxx
37XXXX+1HXXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
+
ROT 2 2
GELB 5 5
GRÜN 6 6
SCHWARZ 1 1
-
6P 6P 6P
2
AMP DEUTSCH
3 1
4
6
5
Schema des Dual-Halls:
6
2020 © LINAK A/S
Seite 15 von 100
© 2021 LINAK A/SAntrieb mit relativer Rückmeldung – Dual Hall
I/O Werte:
Eingang/Ausgang Spezifikation Kommentare
Beschreibung Der Antrieb kann mit einem Dual Hall ausgestattet
werden, der eine relative Rückmeldung gibt, wenn
der Antrieb in Bewegung ist.
Siehe Anschlussdiagramm,
Abb. 3, Seite 15
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ±10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Stromversorgung Signal (+) 12-36 V DC Stromverbrauch:
Max. 40 mA, auch wenn der Antrieb
Schwarz Signalstromversorgung-GND (-) nicht in Betrieb ist
Grün Hall B Hall-Ausgang (PNP) Die Signale des Hallsensors werden
durch die Drehung des Antriebsgetrie-
Bewegung pro Hall-Impuls: bes erzeugt.
Aktu- Getriebe Stei- mm/ Diese Signale können in eine SPS
ator gung Zählung (Speicherprogrammierbare Steuerung)
LA36 H 8 mm 0,442 eingespeist werden.
In der SPS können die Quadratursig-
LA36 H 12 mm 0,662 nale genutzt werden, um die Richtung
Hall A LA36 H 16 mm 0,883 und Position der Kolbenstange zu
Gelb
erkennen.
LA36 G 16 mm 1,016
Ausgangsspannunvg min. VIN - 1 V
LA36 F 16 mm 2,309 Ausgangsstrom: max. 12 mA
Überspannung am Motor kann zu
LA36 F 20 mm 2,890
kürzeren Impulsen führen.
Die Frequenz beträgt 14-26 Hz am Ein-
zel-Hall-Ausgang, abhängig von der Last. Hinweis: Genauere Angaben erhalten
Eine Überspannung am Motor kann zu Sie bei Ihrer LINAK Niederlassung.
kürzeren Impulsen führen.
Violett Nicht anschließen
Weiß Nicht anschließen
Seite 16 von 100
© 2021 LINAK A/SAntrieb mit Endstoppsignalen und relativer Rückmeldung – Dual Hall
Anschlussdiagramm:
Endstop signals and relative positioning - Dual hall
Abb.36XXXXXXXH00XX-XXXXXXXXXXXXXXXX
4: 36xxxxx2Hxxxxxx
36xxxxxxxH00xx-xxxxxxxxxxxxxxx
Endstop signals and relative positioning - Dual hall
36XXXX+2HXXXXXX
36XXXXXXXH00XX-XXXXXXXXXXXXXXXX
37XXXX+2HXXXXXX
36XXXX+2HXXXXXX Kompatibel mit:
37XXXX+2HXXXXXX BRAUN 1-3
Kompatibel mit:
Powered by Danfoss
BLAU
BRAUN 4-6
1-3
Powered by Danfoss
+ BLAU 4-6
ROT 2 2
+
ROT 2 2
VIOLETT* 4 4
WEISS* 3 3
VIOLETT* 4 4
WEISS* 3 3
GELB 5 5
GRÜN
GELB 6
5 6
5
GRÜN 6 6
SCHWARZ 1 1
-
6P 6P 6P
2 SCHWARZ 1
AMP 1
DEUTSCH
-
3
6P 1 6P 6P
4
2
AMP DEUTSCH
6
3 1
4 5
6
*VIOLET/WHITE: Endstop signals out are NOT potential free
*VIOLETT/WEISS:5 Endstoppsignale sind NICHT potenzialfrei.
Tip: If you wish to use the endstop signals, you will have to keep power on the brown, blue,
Wenn Sie die
*VIOLET/WHITE:Endstoppsignale
red and blacksignals
Endstop verwenden
wires,outotherwise
are NOT free willmöchten,
the signal
potential be lost. müssen Sie die rote und schwarze Leitung mit Spannung
versorgen, da
Tip:
Schema des sonst
Dual-Halls: dastoSignal
If you wish verloren
use the endstop geht.
signals, you will have to keep power on the brown, blue,
red and black wires, otherwise the signal will be lost.
Schema des Dual-Halls:
7
2020 © LINAK A/S
7
2020 © LINAK A/S
Seite 17 von 100
© 2021 LINAK A/SAntrieb mit Endstoppsignalen und relativer Rückmeldung – Dual Hall
I/O Werte:
Eingang/Aus- Spezifikation Kommentare
gang
Beschreibung Der Antrieb kann mit einem Dual Hall ausgestattet
werden, der eine relative Rückmeldung gibt, wenn
der Antrieb in Bewegung ist.
Siehe Anschlussdiagramm,
Abb. 4 Seite 17
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ±10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Stromversorgung Signal (+) 12-36 V DC Stromverbrauch:
Max. 40 mA, auch wenn der Antrieb
Schwarz Signalstromversorgung-GND (-) nicht in Betrieb ist
Grün Hall B Hall-Ausgang (PNP) Die Signale des Hallsensor durch die
Drehung des Antriebsgetriebes erzeugt.
Bewegung pro Hall-Impuls: Diese Signale können in eine SPS (Spei-
Aktu- Getriebe Stei- mm/ cherprogrammierbare Steuerung) einge-
ator gung Zählung speist werden.
LA36 H 8 mm 0,442 In der SPS können die Quadratursignale
genutzt werden, um die Richtung und
LA36 H 12 mm 0,662 Position der Kolbenstange zu erkennen.
Gelb Hall A LA36 H 16 mm 0,883
Ausgangsspannung min. VIN - 2 V
LA36 G 16 mm 1,016 Ausgangsstrom: 12 mA
LA36 F 16 mm 2,309 Überspannung am Motor kann zu kürze-
ren Impulsen führen.
LA36 F 20 mm 2,890
Hinweis: Genauere Angaben erhalten Sie
Die Frequenz beträgt 14-26 Hz am Ein- bei Ihrer LINAK Niederlassung.
zel-Hall-Ausgang, abhängig von der Last.
Eine Überspannung am Motor kann zu
kürzeren Impulsen führen.
Violett Endstopp-Signalausgang eingefahren Ausgangsspannung min. VIN - 2 V
Max. Ausgangsstrom = 30 mA
Weiß Endstopp-Signalausgang ausgefahren NICHT potenzialfrei
Seite 18 von 100
© 2021 LINAK A/SAntrieb mit relativer Rückmeldung – Einzel-Hall
Relative positioning - Single hall
Anschlussdiagramm:
36XXXXXXXK00XX-XXXXXXXXXXXXXXXXXX
Abb. 5: 36xxxxx0K/1Kxxxxxx
36XXXX+1KXXXXXX
36xxxxxxxK00xx-xxxxxxxxxxxxxxx
37XXXX+1KXXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
+
ROT 2 2
VIOLETT 4 4
SCHWARZ 1 1
-
6P 6P 6P
2
AMP DEUTSCH
3 1
4
6
5
Seite 19 von 100
© 2021 LINAK A/S
8Antrieb mit relativer Rückmeldung – Einzel-Hall
I/O Werte:
Eingang/Ausgang Spezifikation Kommentare
Beschreibung Der Antrieb kann mit einem Einzel-Hall
versehen werden, der eine relative
Rückmeldung gibt, wenn der Antrieb in
Bewegung ist.
Siehe Anschlussdiagramm
Abb. 5 Seite 19
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ±10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Stromversorgung Signal (+) 12-36 V DC Stromverbrauch:
Max. 40 mA, auch wenn der Antrieb nicht in Be-
Schwarz Signalstromversorgung-GND (-) trieb ist
Grün Nicht anschließen
Gelb Nicht anschließen
...Fortsetzung
Seite 20 von 100
© 2021 LINAK A/SEingang/Ausgang Spezifikation Kommentare
Violett Einzel-Hall-Ausgang (PNP) Ausgangsspannung min. VIN - 2 V
Max. Ausgangsstrom= 12 mA
Bewegung pro Hall-Impuls:
Max. 680 nF
Aktu- Getriebe Stei- mm/
ator gung Zählung Hinweis: Genauere Angaben erhalten Sie bei Ihrer
LINAK Niederlassung.
LA36 H 8 mm 0,110
Geringe Frequenz bei hoher Last. Hohe Frequenz
LA36 H 12 mm 0,166
ohne Last.
LA36 H 16 mm 0,221
LA36 G 16 mm 0,254
LA36 F 16 mm 0,577
LA36 F 20 mm 0,721
Die Frequenz beträgt 14-26 Hz am Ein-
zel-Hall-Ausgang, abhängig von der Last.
Eine Überspannung am Motor kann zu
kürzeren Impulsen führen.
Eingang des Einzel-Halls:
Diagramm Einzel-Hall Ausgang
Hall A Mikropro-
zessor
Hall B
Abb. 5.1
Weiß Nicht anschließen
Seite 21 von 100
© 2021 LINAK A/SAntrieb mit Endstoppsignalen und relativer Rückmeldung – Einzel-Hall
Anschlussdiagramm:
Endstop signals and relative positioning - Single hall
Abb. 6: 36xxxxx2Kxxxxxx
36XXXX+2KXXXXXX
36xxxxxxxK00xx-xxxxxxxxxxxxxxx
37XXXX+2KXXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
+
ROT 2 2
GELB* 5 5
GRÜN* 6 6
VIOLETT 4 4
SCHWARZ 1 1
-
6P 6P 6P
2
AMP DEUTSCH
3 1
4
6
5
*YELLOW/GREEN: Endstop signals out are NOT potential free (see specifications on next page)
*GELB/GRÜN:
Tip: If youEndstoppsignale sindsignals,
wish to use the endstop NICHTyoupotenzialfrei.
will have to keep power on the brown, blue,
red and black wires, otherwise the signal will be lost.
Wenn Sie die Endstoppsignale verwenden möchten, müssen Sie die rote und schwarze Leitung mit Spannung
versorgen, da sonst das Signal verloren geht.
Seite 22 von 100
© 2021 LINAK A/S
9Antrieb mit Endstoppsignalen und relativer Rückmeldung – Einzel-Hall
I/O Werte:
Eingang/Ausgang Spezifikation Kommentare
Beschreibung Der Antrieb kann mit einem Einzel-Hall versehen
werden, der eine relative Rückmeldung gibt, wenn der
Antrieb in Bewegung ist.
Siehe Anschlussdiagramm, Abb. 6 Seite 22
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ±10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Stromversorgung Signal (+) 12-36 V DC Stromverbrauch:
Max. 40 mA, auch wenn der Antrieb
Schwarz Signalstromversorgung-GND (-) nicht in Betrieb ist
Grün Endstopp-Signalausgang ausgefahren Ausgangsspannung min. VIN - 2 V
Max. Ausgangsstrom: 100 mA
Gelb Endstopp-Signalausgang eingefahren NICHT potenzialfrei
Violett Hall-Ausgang (PNP) Ausgangsspannung min. VIN - 2 V
Max. Ausgangsstrom: 12 mA
Bewegung pro Hall-Impuls:
Max. 680 nF
Aktuator Getriebe Steigung mm/Zählung
Hinweis: Genauere Angaben erhalten
LA36 H 8 mm 0,110 Sie bei Ihrer LINAK Niederlassung.
LA36 H 12 mm 0,166 Geringe Frequenz bei hoher Last. Hohe
LA36 H 16 mm 0,221 Frequenz ohne Last.
LA36 G 16 mm 0,254
LA36 F 16 mm 0,577
LA36 F 20 mm 0,721
Die Frequenz beträgt 30-125 Hz am Einzel-Hall-Aus-
gang, abhängig von der Last.
Eine Überspannung am Motor kann zu kürzeren
Impulsen führen.
Eingang Einzel-Hall Ausgang
Hall A Mikropro-
zessor
Hall B Abb. 6.1
Weiß Nicht anschließen
Seite 23 von 100
© 2021 LINAK A/SAntrieb mit absoluter Rückmeldung – Analoge Rückmeldung
Anschlussdiagramm:
Absolute positioning - Analogue feedback
Abb. 7: 36xxxxx1B/1Cxxxxxx
36XXXX+1B/1CXXXXXX
36xxxxxxxB00xx-xxxxxxxxxxxxxxx
36XXXXXXXB00/C00XX-XXXXXXXXXXXXXXXX
36xxxxxxxC00xx-xxxxxxxxxxxxxxx
37XXXX+1B/1CXXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
+
ROT 2 2
VIOLETT 4 4
SCHWARZ 1 1
-
6P 6P 6P
2
AMP DEUTSCH
3 1
4
6
5
Seite 24 von 100
© 2021 LINAK A/SAntrieb mit absoluter Rückmeldung – Analoge Rückmeldung
I/O Werte:
Eingang/Ausgang Spezifikation Kommentare
Beschreibung Der Antrieb kann mit einer elektronischen Schal-
tung versehen werden, die ein analoges Rück-
meldungssignal gibt.
Siehe Anschlussdiagramm,
Abb. 7 Seite 24
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ±10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Stromversorgung Signal (+) 12-36 V DC Stromverbrauch:
Max. 60 mA, auch wenn der Antrieb nicht
Schwarz Signalstromversorgung-GND (-) in Betrieb ist
Grün Nicht anschließen
Gelb Nicht anschließen
Violett Analoge Rückmeldung Toleranz +/-0,2 V
Max. Ausgangsstrom: 1 mA
0-10 V (Option B) Restwelligkeit max. 200 mV
0,5-4,5 V (Option C) Transaktionsverzögerung 100 ms
Lineare Rückmeldung 0,5 %
Es wird empfohlen, den Antrieb regelmäßig
die Begrenzungsschalter aktivieren zu
lassen, um eine genauere Rückmeldung zu
gewährleisten.
Weiß Nicht anschließen
Es wird empfohlen, dass der Antrieb seine Endschalter regelmäßig aktiviert, um eine genauere Posi-
tionierung zu gewährleisten. Der Aktuator kann auch in den Zustand „Positionsverlust” gehen. Wenn
der Aktuator in den Positionsverlustzustand übergeht, bleibt das Rückmeldungslevel auf dem höchsten
Wert, bis der Aktuator initialisiert wird. Wenn zum Beispiel die Rückmeldung 0-10 V beträgt, bleibt der
Rückmeldungswert 10 V, bis der Antrieb initialisiert wird. Beide physikalischen Endschalter müssen für
die korrekte Initialisierung der Rückmeldung aktiviert werden. Es gibt keine Regel, welcher zuerst aktiviert
werden muss.
Seite 25 von 100
© 2021 LINAK A/SAntrieb mit Endstoppsignalen und absoluter Rückmeldung –
Analoge Rückmeldung
Anschlussdiagramm:
Endstop
Abb. signals and absolute
8: 36xxxxx2B/2Cxxxxxx positioning - Analogue feedback
36XXXX+2B/2CXXXXXX
36xxxxxxxB00xx-xxxxxxxxxxxxxxx
36XXXXXXXB00/C00XX-XXXXXXXXXXXXXXXX
36xxxxxxxC00xx-xxxxxxxxxxxxxxx
37XXXX+2B/2CXXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
+
ROT 2 2
GELB* 5 5
GRÜN* 6 6
VIOLETT 4 4
SCHWARZ 1 1
-
6P 6P 6P
2
AMP DEUTSCH
3 1
4
6
5
*YELLOW/GREEN: Endstop signals out are NOT potential free
*GELB/GRÜN: Endstoppsignale sind NICHT potenzialfrei.
Wenn SieTip:
dieIf you wish to use the endstop signals, you will have to keep power on the brown, blue,
Endstoppsignale verwenden möchten, müssen Sie die rote und schwarze Leitung mit Spannung
red and black wires, otherwise the signal will be lost.
versorgen, da sonst das Signal verloren geht.
Seite 26 von 100
© 2021 LINAK A/SAntrieb mit Endstoppsignalen und absoluter Rückmeldung –
Analoge Rückmeldung
I/O Werte:
Eingang/Ausgang Spezifikation Kommentare
Beschreibung Der Antrieb kann mit einer elektronischen Schal-
tung versehen werden, die ein analoges Rück-
meldungssignal gibt.
Siehe Anschlussdiagramm,
Abb. 8 Seite 26
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ±10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Stromversorgung Signal (+) 12-36 V DC Stromverbrauch:
Max. 60 mA, auch wenn der Antrieb nicht
Schwarz Signalstromversorgung-GND (-) in Betrieb ist
Grün Endstoppsignalausgang ausgefahren Ausgangsspannung min. VIN - 2 V
Max. Ausgangsstrom = 100 mA
Gelb Endstoppsignalausgang eingefahren NICHT potenzialfrei
Violett Analoge Rückmeldung Toleranz +/-0,2 V
Max. Ausgangsstrom: 1 mA
0-10 V (Option B) Restwelligkeit max. 200 mV
0,5-4,5 V (Option C) Transaktionsverzögerung 20 ms
Lineare Rückmeldung 0,5 %
Es wird empfohlen, den Antrieb regelmäßig
die Begrenzungsschalter aktivieren zu
lassen, um eine genauere Rückmeldung zu
gewährleisten.
Weiß Nicht anschließen
Es wird empfohlen, dass der Antrieb seine Endschalter regelmäßig aktiviert, um eine genauere Posi-
tionierung zu gewährleisten. Der Aktuator kann auch in den Zustand „Positionsverlust” gehen. Wenn
der Aktuator in den Positionsverlustzustand übergeht, bleibt das Rückmeldungslevel auf dem höchsten
Wert, bis der Aktuator initialisiert wird. Wenn zum Beispiel die Rückmeldung 0-10 V beträgt, bleibt der
Rückmeldungswert 10 V, bis der Antrieb initialisiert wird. Beide physikalischen Endschalter müssen für
die korrekte Initialisierung der Rückmeldung aktiviert werden. Es gibt keine Regel, welcher zuerst aktiviert
werden muss.
Seite 27 von 100
© 2021 LINAK A/SAntrieb mit absoluter Rückmeldung – Rückmeldung mechanisches
Potentiometer
Anschlussdiagramm:
Absolute positioning - Mechanical potentiometer
Abb. 9: 36xxxxx0P/1Pxxxxxx
36XXXXX2PXXXXXX
36xxxxxxxP00xx-xxxxxxxxxxxxxxx
36XXXXXXXP00XX-XXXXXXXXXXXXXXX
37XXXXX2PXXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
+
WEISS 3 3
VIOLETT 4 4
SCHWARZ 1 1
-
6P 6P 6P
2
AMP DEUTSCH
3 1
4
6
5
Seite 28 von 100
© 2021 LINAK A/SAntrieb mit absoluter Rückmeldung – Rückmeldung mechanisches
Potentiometer
I/O Werte:
Eingang/Ausgang Spezifikation Kommentare
Beschreibung Der Antrieb kann mit einem mechanischen Po-
tentiometer (10 kOhm) ausgestattet werden.
Siehe Anschlussdiagramm,
Abb. 9 Seite 28
Bourns 0-10 kOhm, 5 %, 10 Umdrehungen
Typ: 3540 Wirewound
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ±10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Nicht anschließen
Schwarz Signalstromversorgung-GND (-)
Grün Nicht anschließen
Gelb Nicht anschließen
Violett Mechanischer Potentiometer-Ausgang +10 V oder anderer Wert
Ausgangsbereich mit 8 mm Spindelsteigung Ausgangsschutz:
(nur LA37): 1 kOhm Schutzwiderstand
1 kOhm = 0 mm Hub
11 kOhm = 333 mm Hub Linearität: ±0,25 %
Ausgangsbereich mit 12 mm Spindelsteigung:
1 kOhm = 0 mm Hub
11 kOhm = 500 mm Hub
Ausgangsbereich mit 20 mm Spindelsteigung:
1 kOhm = 0 mm Hub
11 kOhm = 833 mm Hub
Weiß VCC+ an Potentiometer
10 V DC oder andere Werte
Bitte beachten Sie, dass bei Versionen mit schnellem Motor (Spindelsteigung 20 mm, H-Getriebe) kein
Potentiometer möglich ist.
Seite 29 von 100
© 2021 LINAK A/SAntrieb mit Endstoppsignalen und absoluter Rückmeldung –
Endstop signals
Rückmeldung and absolute
mechanisches positioning - Mechanical
Potentiometer potentiometer
Anschlussdiagramm:
36XXXXX2PXXXXXX
Abb. 10: 36xxxxx2Pxxxxxx
36XXXXXXXXP00XX-XXXXXXXXXXXXXXX
36xxxxxxxP01xx-xxxxxxxxxxxxxxx
37XXXXX2PXXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
+
ROT 2 2
GELB* 5 5
GRÜN* 6 6
WEISS 3 3
VIOLETT 4 4
SCHWARZ 1 1
-
6P 6P 6P
2
AMP DEUTSCH
3 1
4
6
5
*YELLOW/GREEN: Endstop signals out are NOT potential free
Tip: If you wish to use the endstop signals, you will have to keep power on the red and black wires, otherwise the signal will be lost.
*GELB/GRÜN: Endstoppsignale sind NICHT potenzialfrei.
Wenn Sie die Endstoppsignale verwenden möchten, müssen Sie die rote und schwarze Leitung mit Spannung
versorgen, da sonst das Signal verloren geht.
21
Seite
2020 30©
von 100 A/S
LINAK
© 2021 LINAK A/SAntrieb mit Endstoppsignalen und absoluter Rückmeldung – Rückmeldung
mechanisches Potentiometer
I/O Werte:
Eingang/Ausgang Spezifikation Kommentare
Beschreibung Der Antrieb kann mit einem mechanischen Po-
tentiometer (10 kOhm) ausgestattet werden.
Siehe Anschlussdiagramm,
Abb. 10 Seite 30
Bourns 0-10 kOhm, 5 %, 10 Umdrehungen
Typ: 3540 Wirewound
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ±10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Stromversorgung Signal (+) 12-36 V DC Für Endstoppsignale
Schwarz Signalstromversorgung-GND (-)
Grün Endstopp-Signalausgang ausgefahren Ausgangsspannung min. VIN - 2 V
Max. Ausgangsstrom = 100 mA
Gelb Endstopp-Signalausgang eingefahren NICHT potenzialfrei
Violett Mechanischer Potentiometer-Ausgang +10 V oder anderer Wert
Ausgangsbereich mit 8 mm Spindelsteigung Ausgangsschutz:
(nur LA37): 1 kOhm Schutzwiderstand
1 kOhm = 0 mm Hub
11 kOhm = 333 mm Hub Linearität: ±0,25 %
Ausgangsbereich mit 12 mm Spindelsteigung:
1 kOhm = 0 mm Hub
11 kOhm = 500 mm Hub
Ausgangsbereich mit 20 mm Spindelsteigung:
1 kOhm = 0 mm Hub
11 kOhm = 833 mm Hub
Weiß VCC+ an Potentiometer
10 V DC oder andere Werte
Bitte beachten Sie, dass bei Versionen mit schnellem Motor (Spindelsteigung 20 mm, H-Getriebe) kein
Potentiometer möglich ist.
Seite 31 von 100
© 2021 LINAK A/SAntrieb mit absoluter Rückmeldung – PWM
Absolute positioning - PWM
Anschlussdiagramm
36XXXX+15/16XXXXXX
Abb. 11: 36xxxxx15/16xxxxxx
36XXXXXXXF00XX-XXXXXXXXXXXXXXXX
36xxxxxxxF01xx-xxxxxxxxxxxxxxx
37XXXX+15/16XXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
+
ROT 2 2
VIOLETT 1 1
SCHWARZ 1 1
-
6P 6P 6P
2
AMP DEUTSCH
3 1
4
6
5
Seite 32 von 100
12
© 2021 LINAK A/S
2020 © LINAK A/SAntrieb mit absoluter Rückmeldung – PWM
I/O Werte:
Eingang/Ausgang Spezifikation Kommentare
Beschreibung Der Antrieb kann mit einer elektronischen
Schaltung versehen werden, die ein analoges
Rückmeldungssignal gibt.
PWM
Siehe Anschlussdiagramm,
Abb. 11 Seite 32
Braun 12, 24, 36* oder 48* V DC (+/-) Zum Ausfahren des Antriebs:
*Nur für LA36 verfügbar Braun an Pluspol anschließen
12 V DC ±20 % Zum Einfahren des Antriebs
24 V DC ±10 % Braun an Minuspol anschließen
36 V DC ±10 %
Blau 48 V DC ± 10 % Zum Ausfahren des Antriebs:
Blau an Minuspol anschließen
Unter normalen Bedingungen:
12 V, max. 26 A abhängig von der Last Zum Einfahren des Antriebs:
24 V, max. 13 A abhängig von der Last Blau an Pluspol anschließen
36 V, max. 10 A abhängig von der Last
48 V, max. 7 A abhängig von der Last
Rot Stromversorgung Signal (+) 12-36 V DC Stromverbrauch:
Max. 60 mA, auch wenn der Antrieb nicht
Schwarz Signalstromversorgung-GND (-) in Betrieb ist
Grün Nicht anschließen
Gelb Nicht anschließen
Violett Digitalausgang Rückmeldung (PNP) Ausgangsspannung min. VIN - 2 V
Toleranz +/-2 %
10-90 % (Option 5)
Max. Ausgangsstrom = 12 mA
20-80 % (Option 6)
Frequenz: 75 Hz
Es wird empfohlen, den Antrieb regelmäßig
die Begrenzungsschalter aktivieren zu
lassen, um eine genauere Rückmeldung zu
gewährleisten.
Weiß Nicht anschließen
Es wird empfohlen, dass der Antrieb seine Endschalter regelmäßig aktiviert, um eine genauere Posi-
tionierung zu gewährleisten. Der Aktuator kann auch in den Zustand „Positionsverlust” gehen. Wenn
der Aktuator in den Positionsverlustzustand übergeht, bleibt das Rückmeldungslevel auf dem höchsten
Wert, bis der Aktuator initialisiert wird. Wenn zum Beispiel die Rückmeldung 0-10 V beträgt, bleibt der
Rückmeldungswert 10 V, bis der Antrieb initialisiert wird. Beide physikalischen Endschalter müssen für
die korrekte Initialisierung der Rückmeldung aktiviert werden. Es gibt keine Regel, welcher zuerst aktiviert
werden muss.
Seite 33 von 100
© 2021 LINAK A/SAntrieb mit Endstoppsignalen und absoluter Rückmeldung – PWM
Endstop signals and absolute positioning - PWM
Anschlussdiagramm:
36XXXX+25/26XXXXXX
Abb. 12: 36xxxxx25/26xxxxxx
36XXXXXXXF00XX-XXXXXXXXXXXXXXXX
36xxxxxxxF01xx-xxxxxxxxxxxxxxx
37XXXX+25/26XXXXXX
Kompatibel mit:
BRAUN 1-3
Powered by Danfoss
BLAU 4-6
+
ROT 2 2
GELB* 5 5
GRÜN* 6 6
VIOLETT 4 4
SCHWARZ 1 1
-
6P 6P 6P
2
AMP DEUTSCH
3 1
4
6
5
*YELLOW/GREEN: Endstop signals out are NOT potential free
Tip: If you wish to use the endstop signals, you will have to keep power on the brown, blue,
*GELB/GRÜN:redEndstoppsignale sind NICHT
and black wires, otherwise potenzialfrei.
the signal will be lost.
Wenn Sie die Endstoppsignale verwenden möchten, müssen Sie die rote und schwarze Leitung mit Spannung
versorgen, da sonst das Signal verloren geht.
13
2020 © LINAK A/S
Seite 34 von 100
© 2021 LINAK A/SSie können auch lesen