Bestandserfassung mittels 3D Scanner - Hochschule Trier
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Hochschule Bestandserfassung mittels 3D Scanner Ein Zwischenbericht zur Digitalisierung des Hochschulcampus Trier im Rahmen des BMBF-Projekts: „BIMBiB - Bauen im Bestand“ Text: Peter Marx Punktwolke des Campus Schneidershof - Hochschule Trier: Photogrammmetrische Auswertung von Drohnenbildern Das in Ausgabe 4/2020 kurz vorge- Der Scanner misst Entfernungen mittels ten der Scanpositionen oder auch Re- stellte BMBF-Forschungsprojekt unter- der Time-of-Flight-Methode, indem er die gistrieren ist eigentlich ein Bearbeitungs- sucht am Beispiel des Campus Schnei- Zeit stoppt, die der Laserimpuls benötigt, schritt, der nicht im Feld stattfindet, dershof der Hochschule Trier, wie die um die Strecke zum gemessenen Objekt sondern bei der späteren Bearbeitung. BIM-Methodik auf Bestandsgebäude und zurück zum Laser zurückzulegen. Ein Dabei unterscheidet man Grob- und angewendet werden kann. Die Erstel- einziger Scanvorgang zeichnet je nach Feinregistrierung. lung eines Gebäudedatenmodells vom eingestellter Auflösung zwischen 42 und Für die Nachbearbeitung der Scans Bestandsgebäude ist hierbei der erste 208 Millionen Punkte auf. Von diesen ent- wurde die Leicasoftware Register360 ein- Schritt und gleichzeitig eine der größten hält jeder mindestens Informationen über gesetzt. Diese zeichnet sich im Gegen- Herausforderungen für den erfolgrei- seine x-, y-, z- Koordinaten, einen Wert satz zu dem älteren Cyclone dadurch aus, chen Einsatz von BIM. für die Stärke des reflektierten Signals (In- dass sie dem Anwender bessere Instru- Zur effizienten Erfassung des Bestandes tensität) und einen Farbwert, der aus dem mente zur Kontrolle der Punktwolkenqua- wird ein terrestrischer Laserscanner ver- überlagerten Foto generiert wird. Dazu lität an die Hand gibt und die Bearbeitung wendet, mit dessen Hilfe ein Gebäude in sind im Scan noch das 360° Foto (beste- vereinfacht. Damit geht jedoch einher, kürzester Zeit vermessen werden kann. hend aus 12 Einzelbildern) in 5 Belich- dass die Punktwolkengröße nur ca. 2000 Über den Einsatz dieses Geräts und die tungsstufen (HDR) und diverse Fotos, Scanstandpunkte enthalten darf, wohin- anschließende Weiterverarbeitung der die zu Dokumentationszwecken an be- gegen Cyclone in der Anzahl der Stand- Daten bis zur fertigen Punktwolke soll in stimmte Objekte im Scan angeheftet punkte quasi unbegrenzt ist. diesem Beitrag berichtet werden. werden können, enthalten. Das Daten- Bei der Grobregistrierung sucht ein Algo- Zum besseren Verständnis der im Fol- volumen eines einzelnen Scans in mittle- rithmus nach gewissen übereinstimmen- genden geschilderten Probleme ist es rer Auflösung beträgt so mindestens 500 den Merkmalen innerhalb der Punktwol- notwendig, sowohl den Scanner als MB. ken von verschiedenen Scans. Dies kann auch die verwendete Bearbeitungssoft- Ein ständig die Umgebung trackendes zum Beispiel das Verhältnis einer gewis- ware kurz vorzustellen. Kamerasystem sorgt dafür, dass der sen Anzahl von Ebenen oder Punkten zu- Als Scanner wurde der RTC360 der Scanner selbstständig seine Position im einander sein. Dieser Schritt der Grob- Firma Leica verwendet. Dieser Scanner Bezug auf den zuvor getätigten Scan er- registrierung entfällt in der Regel beim zeichnet sich durch seine leichte Bedie- mitteln kann und ermöglicht so ein zügi- RTC360 bzw. findet direkt im Feld durch nung aus und kann selbst von Laien ges Vermessen mit minimalem Aufwand das Trackingsystem statt. Alternativ bzw. nach einer kurzen Einweisung sicher ver- beim Ausrichten der verschiedenen zusätzlich dazu können auch Zielmarken wendet werden. Scanpositionen im Feld. Dieses Ausrich- verwendet werden, über die dann eine 18 BDB-LANDESNACHRICHTEN Rheinland-Pfalz / Saarland 2/2021

Hochschule
Registrierung der Scans möglich ist. in zwei unterschiedlichen Punktwolken bausrichtung vorangegangen sein, wer-
Die Grobregistrierung ist auf etwa zwei nach benachbarten Punkten zu suchen. den Punkte als benachbart definiert, die
bis drei Zentimeter genau und notwen- Dabei ist er aber darauf angewiesen, dass in der Realität gar nicht nebeneinander
dig, damit die Feinregistrierung meist die beiden Punktwolken vorher grob aus- liegen und eine fehlerhafte Registrierung,
mit Hilfe des Iterative Closest Point – gerichtet worden sind, da er diese schritt- die nicht aus den Fehlerwerten zur Ver-
Algorithmus die Endausrichtung vor- weise ineinanderschiebt und -dreht, bis bindungsqualität herausgelesen werden
nehmen kann. Der ICP-Algorithmus ist sich benachbarte Punkte wieder vonein- kann, erfolgt.
dabei eine sehr effiziente Methode, um ander entfernen. Sollte also keine Gro-
Aufgrund falscher Grobausrichtung fehlerhaft ausgerichtete Punktwolken (links) und korrigierte Situation (rechts).
Ein weiterer Nachteil des ICP-Algorith- tete Problem war die Größe des Daten- ein Volumen von etwa 9 Terrabyte. Diese
mus ist, dass Punktwolken immer nur volumens. Der Campus Schneidershof Rohdaten wurden zur Bearbeitung ko-
paarweise abgeglichen werden können. besteht aus 20 Gebäuden, wobei für die piert und das daraus entstehende Da-
Da auch dies fehlerbehaftet ist, kommt vier großen Gebäude jeweils etwa 1400 tenvolumen blieb auch nach Fertigstel-
es in der Gesamtpunktwolke zu Feh- und für die kleineren etwa 200-400 lung der Punktwolke als Sicherungskopie
lern, die durch eine globale Optimierung Scans benötigt wurden. Die Gesamtan- erhalten. Damit mit der Punktwolke in
in einem letzten Registrierungsschritt zahl der Scans summiert sich auf etwa der entsprechenden BIM- Software (z.B.
ausgeglichen werden können. 10000 Einzelscans. Der Großteil dieser Autodesk Revit) gearbeitet werden kann,
Aus den oben aufgeführten Punkten er- Scans wurde in mittlerer Auflösung vor- musste diese in einem speziellen Datei-
gaben sich während des Projektverlaufs genommen, da die Scans im Innenbe- format gespeichert werden. Diese Datei
ein paar interessante Probleme, über reich keine großen Entfernungen über- hat etwa ein Drittel der ursprünglichen
die sich ein potentieller Anwender be- brücken mussten. Die benötigten Punktwolkengröße und somit summiert
wusst sein sollte, bevor er zu dieser Me- Außenscans wurden in der höchsten sich das aktuelle Gesamtvolumen der
thode der Bestandaufnahme greift. Auflösung durchgeführt. So erzeugten Scandaten auf etwa 21 Terrabyte.
Das erste und anfangs schon angedeu- bereits die Rohdaten der Campusscans
Übersicht über bereits gescannte Gebäude des Campus Schneidershof und Anzahl der benötigten Scans
BDB-LANDESNACHRICHTEN Rheinland-Pfalz / Saarland 2/2021 19
Hochschule
Da eine Bearbeitung über das Netzwerk Das nächste Problem ergab sich aus genauigkeit, die in größerer Entfernung
aufgrund des Datenvolumens nicht der Funktionsweise des Lasers. Wie immer weiter zunimmt. Dies ist beson-
möglich ist, mussten die Daten für jeden beschrieben, wird die Zeit gemessen, ders bei fast parallel zum Laserimpuls
Rechner lokal zur Verfügung stehen, die der Laserimpuls benötigt, um nach verlaufenden Flächen zu beobachten,
was den Einsatz von externen Festplat- dem Aussenden wieder auf dem Re- da durch den kleinen Winkel zwischen
ten notwendig machte. Projektgrößen zeptor aufzutreffen, um daraus über Laserstrahl und Fläche sich die Auf-
jenseits der 1TB-Marke erforderten den die bekannte Größe der Lichtge- trefffläche noch einmal vergrößert.
Einsatz von schnellen SSD-Festplatten, schwindigkeit die Distanz zu berech- Dazu kommen Laserimpulse, die so-
da Lese- und Schreibprozesse von nen. Dabei wird davon ausgegangen, wohl Objektkanten im Vordergrund als
günstigen HDD- Festplatten zu langsam dass der Impuls immer direkt zum Re- auch Objekte in größerer Entfernung
wären. Ein sorgfältiges Datenmanage- zeptor zurückkehrt. Dies ist jedoch treffen. So erhält man für denselben
ment und eine gute Infrastruktur sind nicht immer der Fall und es gibt ver- Impuls mehrere Entfernungsinformati-
nötig, um eine effiziente Bearbeitung schiedenste Situation, die das Ergeb- onen. Hierfür gibt es Filter, die diese
der Daten zu gewährleisten. nis verfälschen können. Für einige Punkte recht zuverlässig entfernen.
dieser Situationen gibt es bereits Si- Da nicht nur die gewünschten Objekte
cherungssysteme, um fehlerhaft ge- den Laserimpuls reflektieren, sondern
messene Punkte auszuschließen, jedes Staubkorn, unterschiedlich
viele werden jedoch immer noch warme Luftschichten, Luftfeuchtigkeit
falsch abgebildet, was eine sorgfältige und vieles mehr, muss aus dem Rau-
Nachbearbeitung der einzelnen Scans schen, das dadurch entsteht, das kor-
notwendig macht. rekte Signal herausgefiltert werden. Es
So wird der Laserimpuls vereinfacht ist also nicht möglich, die erste Reflek-
als Punkt angenommen und wäre so- tion zu nehmen, die wieder beim Scan-
mit dimensionslos. Dies ist in der Rea- ner ankommt und daraus die Entfer-
lität nicht der Fall und mit zunehmen- nung zu berechnen. Vielmehr muss
der Entfernung zum Scanner wird die über die Stärke des ankommenden Si-
7 SSD Festplatten mit insgesamt 13TB Fläche, die von einem einzelnen La- gnals darauf geschlossen werden, ob
Speicher für die flexible Bearbeitung serimpuls getroffen wird, immer grö- ein Punkt auf dem angezielten Objekt
von Projekten ßer. Daraus ergibt sich eine Messun- gemessen wurde. Durch die große
Laserkegel bei zunehmender Entfernung und Veränderung des Winkels Laserimpuls mit zwei Entfernungsangaben
20 BDB-LANDESNACHRICHTEN Rheinland-Pfalz / Saarland 2/2021
Hochschule
Nebelschwaden – Da das stärkste Signal oberhalb des Scanners der Nebel war, wurde dieser als Objekt gemessen.
Anzahl an verschiedenen Oberflächen
und damit einhergehend einer unend-
lich großen Anzahl an Kombinationen
aus Entfernung, Auftreffwinkel und
Reflektionseigenschaften der Oberflä-
chen, ist dies ein Problem, das heute
noch nicht gelöst ist und bei der
Nachbearbeitung den größten Auf-
wand verursacht.
So lassen Glasflächen den Laserstrahl
je nach Auftreffwinkel beinahe unge-
hindert durch und erzeugen nur ein
sehr schwaches Signal im Rezeptor
des Lasers. Sie können allerdings
ebenfalls abhängig vom Winkel und
auch von der Krümmung des Glases,
den Strahl stark umlenken, was zu fal-
schen Messergebnissen führt. Aus
Messfehler durch Spiegelungen (Messpunkt wird auf die Spiegelung gesetzt) diesem Grunde sollten in der Punkt-
wolke alle durch Glas aufgenomme-
nen Punkte entfernt werden.
Neben Glas sind es vor allem metalli-
BDB-LANDESNACHRICHTEN Rheinland-Pfalz / Saarland 2/2021 21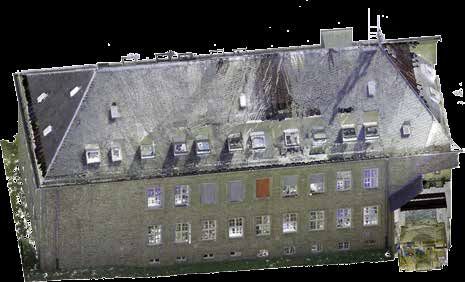
Hochschule Bad mit Spiegelung rechts (Erkennbar an der Scannerspiegelung) sche Oberflächen, die zu großen Pro- und Lüftungsschächten kann eben- an seinen tatsächlichen Ort projiziert, blemen führen und die es zum Teil so- falls nur annähernd erfolgen, da es sondern hinter die Spiegelebene (siehe gar unmöglich machen, Gegenstände hier große Unsicherheiten gibt, was Abbildung Seite 21 unten, roter Strahl). auch nur annähernd in ihren korrekten Form und Abmessungen angeht. Bei Versorgungsleitungen kommt er- Dimensionen zu erfassen. Spiegel Die Spiegelproblematik entsteht da- schwerend hinzu, dass diese häufig sind für den Scanner unsichtbar und durch, dass für die Vermessung von isoliert sind und die äußere Schicht der gespiegelte Raum wird vom Scan- einer direkten Reflektion ausgegan- eine sehr stark verknitterte Alufolie ist. ner als realer Raum abgebildet. Ver- gen wird, die auch das stärkste Signal Hierdurch entstehen pro Laserimpuls chromte Oberflächen, wie sie in Bä- erzeugt. Dies ist bei stark reflektieren- sehr viele Reflektionen, bevor das Si- dern oder als Beschläge an Möbeln den Flächen allerdings nicht der Fall. gnal zum Rezeptor zurückfindet. Dies vorkommen, können nicht vermessen Hier wird der Laserstrahl abgelenkt führt zu stark verrauschten Rohrquer- werden und erzeugen überall im Raum und erst das Signal von einer sich in schnitten. Fragmente, die, wenn nicht manuell der Metallfläche spiegelnden, schwach Durch die notwendige Nachbearbei- gelöscht, bei der späteren Modellie- reflektierenden Fläche wird als Stopp- tung der Scans kommt es zu einem rung verwirren und die Optik der signal erkannt. Da die Umlenkung des Mehraufwand, der nicht zu unter- Punktwolke stark verschlechtern. Die Laserimpulses nicht registriert werden schätzen ist. Dieser ist dabei unmittel- Erfassung von Versorgungsleitungen kann, wird der gespiegelte Punkt nicht bar von den im Scan vorhandenen Stark verrauschte Rohrquerschnitte aufgrund vieler Reflektionen 22 BDB-LANDESNACHRICHTEN Rheinland-Pfalz / Saarland 2/2021

Hochschule Glas-, Metall-, und Spiegelflächen ab- hängig. So lässt sich zwar zusammenfassend sagen, dass der eigentliche Vermes- sungsaufwand tatsächlich gering aus- fällt. Der Zeitaufwand, der durch die Nachbearbeitung entsteht, kann jedoch je nach Gebäudetyp stark schwanken. So beträgt der durchschnittliche Zeit- aufwand pro Scan für dieses Projekt 6 Minuten. Dieser Wert setzt sich zusam- men aus dem gesamten Zeitaufwand für die reinen Scanarbeiten und der Ge- samtzahl der angefertigten Scans. Da- rin enthalten sind also auch die Zeiten für das Aufhängen und Abhängen der Zielmarken, das Öffnen und Schließen der abgehängten Decken für die Scans innerhalb der Decke, der Auf- und Abbau des Scanners, der eigent- liche Scan und diverse Auf- und Um- räumarbeiten. Die Nachbearbeitungszeiten sind mit etwa 9 Minuten pro Scan 1,5mal so hoch. Beide Werte sind Durchschnitt- werte. Während jedoch der Wert bei den Scans kaum schwankt, ändert sich der Wert der Bearbeitungszeit je nach Situation extrem. Beispielhaft sei hier das Gebäude J und der Gebäudekomplex E, F, G, H genannt. Gebäude J ist ein mit wenig Fensterfläche ausgestatteter Altbau, bei dem Versorgungsleitungen un- sichtbar verlegt sind und im Gebäude Gebäude J - Altbau mit wenig Fenster- und Metallflächen selbst wenig Glas- und Metallflächen vorzufinden sind. Die durchschnittli- angeschlossene Küchen- und Techni- löst werden können. Hier steckt die che Nachbearbeitungszeit lag hier bei kräume wohl eher eine Bearbeitungs- Entwicklung allerdings noch in der An- knapp 5,5 Minuten pro Scan. zeit von etwa 30 Minuten beanspruch- fangsphase, was bedeutet, dass sehr Der Gebäudekomplex E, F, G, H bein- ten. hohe Bearbeitungszeiten anfallen, die haltet die Mensa, die viele Glasflächen Während man bei einer Kalkulation die auch nicht immer ein zufriedenstellen- enthält. Außerdem ist ein Großteil der Scanzeit sehr genau einschätzen kann, des Ergebnis garantieren können, da Kücheneinrichtungen, Versorgungslei- ist die Nachbearbeitungszeit stark situ- selbst erfahrenes Personal nicht im- tungen und technischen Einrichtun- ationsabhängig und kann schnell zur mer sagen kann, wo bei Glas- und gen aus Metall und somit stark spie- Kostenfalle werden. Metallobjekten die wahren Abmes- gelnd. Daneben gibt es noch Büro- und Es ist also je nach Gebäudetyp abzu- sungen enden und die Spiegelungen Vorlesungsräume. Hier liegt der Zeit- wägen, ob eine terrestrische Laser- beginnen. wert für die Nachbearbeitung bei vermessung das geeignete Mittel zur Für Massivbauten mit weniger Glas- knapp 12 Minuten pro Scan, wobei Bestandserfassung ist. Moderne re- und Metallflächen ist der terrestrische auch hier schon im Gebäude starke präsentative Gebäude mit hohem Laserscan jedoch ein hervorragendes Schwankungen vorliegen. Die Büro- Glas- und Stahlanteil stellen den Werkzeug, das schnell und zuverläs- und Vorlesungsräume sollten ver- Scanner vor Herausforderungen, die sig sehr genaue Ergebnisse liefert. Al- gleichbar mit dem Zeitwert von Ge- wahrscheinlich in naher Zukunft über lerdings gilt auch hier, dass sowohl bäude J sein, wohingegen Mensa und intelligente Filter und Algorithmen ge- beim Vermessen im Feld als auch bei BDB-LANDESNACHRICHTEN Rheinland-Pfalz / Saarland 2/2021 23

Hochschule
Teilausschnitt aus dem Gebäudekomplex E, F, G, H (Gebäude E/Mensa) – Hier ist der größte Teil der Innenausstattung aus Glas
und Metall
der Nachbearbeitung gut geschultes Für die Nachbearbeitung ist ein gutes ken und somit zu einem mangelhaften
Personal eingesetzt werden sollte. Verständnis der grundlegenden Funk- Ergebnis.
So kann der Mitarbeiter im Feld durch tionsweisen von Grob-, Feinregistrie- Das schnelle Erzeugen von Punktwol-
eine geschickte Wahl des Scanner- rung und globaler Optimierung not- ken ist zwar möglich, geht aber auch
standpunktes die Nachbearbeitungs- wendig, um nachvollziehen zu können, hier zulasten der Qualität. Eine gründ-
zeit stark beeinflussen. Sei es durch ob die Software korrekt arbeitet. Die liche Bearbeitung erfordert Zeit und
die Minimierung der benötigten Scans ausgegebenen Fehlerwerte sind in ih- kostet dementsprechend Geld, wo-
oder durch eine Positionierung in rer Aussagekraft begrenzt und ein durch auch andere Methoden der
günstigen Abständen bzw. Winkeln zu blindes Vertrauen in diese führt zu Bestanderfassung attraktiv werden
problematischen Objekten. falsch zusammengesetzten Punktwol- können.
EG Gebäude E (Mensa) – Visualisierung der Glasflächen
24 BDB-LANDESNACHRICHTEN Rheinland-Pfalz / Saarland 2/2021


Sie können auch lesen