DRONEO-NUTZUNGSPROTOKOLL - Robotics Industry
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

DRONEO-NUTZUNGSPROTOKOLL
Multi-Sensor Maritime Drohne, entwickelt für
Inspektion und Stichprobenziehung der Meeresumwelt
Marco Calcamuggi
marco.calcamuggi@robotics-industry.com
Tél : +33 (0)5 33 89 18 10
Mob : +33 (0)6 21 16 55 08
Inhaltsverzeichnis
1. ANWENDUNGSBEREICHE: 2
A. HÄFEN 2
B. STAUSTUFEN HYDROELEKTRIK 2
C. NAVIGATIONSWEGE 2
D. LANDWIRTSCHAFTLICHEBEWAESSERUNGSSEE 3
E. KONSERVIERUNG DES NATURBEREICHS 3
2. TECHNISCHE DATEN 4
3. FUNKTIONSPRINZIP 5
4. EINGESETZTE GERÄTE
5. VORBEREITUNG DER MISSION 6
A. PARAMETRIERUNG DER PC-STEUERUNG ÜBER DIE LOGIK DER VORBEREITUNG DER MISSION : 6
6. VORBEREITUNGSSCHRITTE 8
A. BODEN EINSATZSTATION : 8
B. EINSATZ DER DROHNE: 8
7. AUSNUTZUNG DER ERGEBNISSE / NACH DER CHARAKTERISIERUNG 10
Robotics Industry SAS – Parc D’Activités du Vert Castel, 3 rue du vert Castel 33700 Mérignac - Siret 751 494 493 00024
1
1. Anwendunsbereiche:
Bathymetrie Datenerfassung Prüfung Wasserkontrolle
a. HÄFEN
Die Hydrographie ist ein wesentliches Element, um sicherzustellen, dass Handels- oder Kreuzfahrtschiffe einen
sicheren Hafenzugang haben.
In Tidehäfen mit erheblichen Sedimentablagerungen müssen sie aufgrund der Aufrechterhaltung von Zugluft
jährlich mehrere Mm3 ausbaggern.
Abgesehen von der Hafen- und Seetätigkeit ist die Erhaltung der Ästuare ein wichtiges Thema mit starken
Umweltauswirkungen, für das die derzeit verwendeten Überwachungslösungen sehr kostspielig sind.
b. STAUSTUFEN HYDROELEKTRIK
Die Verschlammung von Dämmen reduziert die Speicherkapazität von Dämmen erheblich. Diese Verlandung ist
hauptsächlich auf die Ansammlung von erodierten Sedimenten flussaufwärts zurückzuführen.
Weltweit wird geschätzt, dass Dämme bis zu 30% des terrestrischen Sedimentstroms, der die Ozeane erreicht,
zurückhalten (Vörösmarty et al, 2003; Syvistski et al, 2005). Die Manager sind dann gezwungen,
Wartungsspülungen an Bauwerken oder sehr teure Baggerarbeiten durchzuführen.lement dû à l'accumulation
de sédiments érodés à l’amont.
c. NAVIGATIONSWEGE
Die Instandhaltung der Wasserstraße erfordert viel Arbeit, insbesondere an den Navigationsstrukturen. Die
Navigationsdienste sind für die Durchführung bathymetrischer Untersuchungen verantwortlich, um die
Eigenschaften des Fahrwassers zu kontrollieren und Anlandungen zu vermeiden, die Schiffe beschädigen
könnten. Sie bewerten auch die Menge der zu baggernden Materialien.
Alle deutschen schiffbaren Wasserstraßen (Fusse, Kanäle) umfassen 7300 Kilometer.
Robotics Industry SAS – Parc D’Activités du Vert Castel, 3 rue du vert Castel 33700 Mérignac - Siret 751 494 493 00024
2
d. LANDWIRTSCHAFTLICHEBEWAESSERUNGSSEE 3
Die Wasserwirtschaft ist eine große Herausforderung für die Landwirtschaft. Viele Projekte zur Errichtung von
kleinen Dämmen, Hügeln und Bohrlöchern werden derzeit von den Landwirten durchgeführt und drücken damit
ihren Wunsch nach einer Sicherung ihrer Wasserressourcen für ihren landwirtschaftlichen Bedarf konkret aus.
e. KONSERVIERUNG DES NATURBEREICHS 3
Die Erhaltung der natürlichen Umwelt erfordert die Kenntnis der Ressourcen. Die Mission der Wasserbehörden
ist es, die Verschmutzung aus allen Quellen zu reduzieren und die Wasserressourcen und die aquatische
Umwelt zu schützen. Die Wasserbehörde ist in 7 Flusseinzugsgebiete im französischen Mutterland unterteilt.
Zu den verschiedenen Becken gehören natürliche Burgen, Flüsse, Grundwasser, Küsten.....
Droneo ist eine modulare und autonome maritime Plattform, die eine große Anzahl von Instrumenten und
Sensoren für die Inspektion und Probenahme von Meeresumgebungen aufnehmen kann. Diese 1m40-Version
wird in Binnengewässern eingesetzt: Wasserstraßennetz, Flüsse, Kanäle, Seen, Teiche und Becken.
Beispiele für Missionen :
• Verwaltung der Bewässerung
• Sedimentkartierung
• Erhaltung der natürlichen Umwelt
• Visualisierung der Baggerflächen
• Berechnen Sie die verfügbare Wassermenge.
• Optimierung der Wasserspeicherung an Staudämmen
• Überwachung der Verschlammung von Wasserspeichern
• Wasserqualitätsmessung (Verschmutzung, Trübung....)
• Lage der Wracks in den Kanälen
• Inspektion der untergetauchten Brücke
• Analyse von Fauna und Flora
Robotics Industry SAS – Parc D’Activités du Vert Castel, 3 rue du vert Castel 33700 Mérignac - Siret 751 494 493 00024
3
2. TECHNISCHE DATEN 4
Echelle : mm
Technische Daten
Größe und Gewicht
drone Dimension 150 x 94 x 50 cm
Abmessungen der Transportbox
170 x 110 x 80 cm
Leergewicht 35 Kg
Gewicht mit Nutzlasten 100Kg
Geschwindigkeit
Reisegeschwindigkeit 1,05 m/s - 2Knoten
Spitzegeschindigkeit 2,05 m/s - 4 Knoten
Energie und Akku
Antrieb Elektrisch
Pack Batterie 2 Batterien
Kapazität 77 Ah @ 48V
Durchschnittliche Autonomie 10 H
Ladezeit 8H
Schnittstelle und Kommunikation
Steurerung Touch-Tablett-Steuerung mit spezieller Software + Controller
Steuerungsmodus Manueller & Autonomer Steuermodus über Wegpunkte
Motordrehzahl, Batteriestand, Steuerungssystem, Kurs,
Feedback-Informationen Geschwindigkeit
Drahtlose Kommunikation 2,4 GHz
Basissensoren DGPS et IMU
Umfeld
Betriebstemperatur -10° à 30°
Lagertemperatur 0° à 25°
Schutz IP67
Optionen
GPS RTK
Feed back vidéo
Robotics Industry SAS – Parc D’Activités du Vert Castel, 3 rue du vert Castel 33700 Mérignac - Siret 751 494 493 00024
4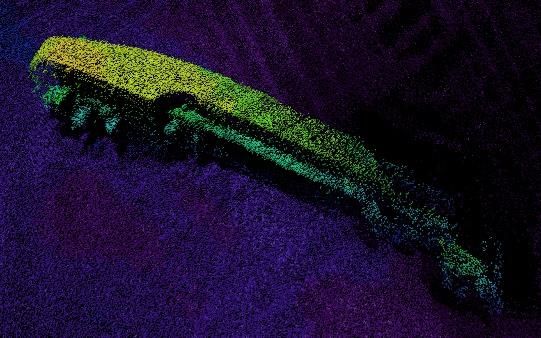
Degradierte Autonomie 5H /70Kg ohne Sensor/Kapazität Nutzlast 40Kg
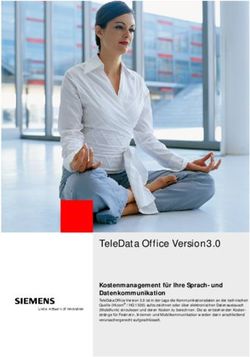
3. FUNKTIONSPRINZIP 5
Das DRONEO-System besteht aus 3 Hauptkomponenten:
Die autonome UAV, eine generische Mehrzweckplattform, die es ermöglicht, eine Reihe von Sensoren
einzubetten, die entsprechend den Anwendungsfällen und den untersuchten Umgebungen ausgewählt
wurden.
Der Steuerungs-PC mit dem Human Machine Interface (HMI) bestimmt die Gesetze der Steuerbefehle, die
sowohl die Missionsvorbereitung als auch die Echtzeitüberwachung ermöglichen.
Ausnutzung der Ergebnisse: Rohdaten, die vom On-Board-Sensor erfasst werden.
Vorbereitung der Mission Vorbereitungschritte Operative Erebnisse
Robotics Industry SAS – Parc D’Activités du Vert Castel, 3 rue du vert Castel 33700 Mérignac - Siret 751 494 493 00024
5
4 Eingesetzte Geräte
• DRONEO Maritime Drohne mit GPS, IMU, Bodenstation (Software, Missionsvorbereitung und -
überwachung)
• Sensoren Ihrer Wahl
• Datenerfassungs- und Verarbeitungssoftware (Hypack-Typ)
5 Die Missionsvorbereitung
• Je nach Mission (z. B. Messung der Verschlammung in Bergseen, Analyse von Sedimenten in einer
Mündung, Messung der Wasserqualität usw.) wird die Wahl der Sensoren und deren Kopplung
unterschiedlich sein.
• Der Einsatz der UAV umfasst die Installation der ausgewählten Sensoren auf der UAV, die Überprüfung
der Ausrüstung (GPS, Kommunikation...) und den Start.
• Parallel zum Einsatz der UAV ermöglicht Ihnen die Konfigurationsphase des Control-PCs Folgendes:
Definition des abzudeckenden Bereichs: Integration von automatischen oder manuellen Wegpunkten
• Wählen Sie die Art der Mission (Wasserreservoirs, Mündung, See....).
• Überprüfen Sie alle an die Drohne angeschlossenen Geräte (GPS, Sensoren, Kommunikation....).
a. PARAMETRIERUNG DER PC-STEUERUNG ÜBER DIE LOGIK DER VORBEREITUNG DER
MISSION
Diese Software bietet alle notwendigen Werkzeuge, um eine Route (Abfolge von Kreuzungspunkten)
für den Betrieb der Drohne zu erstellen. Die Missionsvorbereitung setzt sich chronologisch aus den
folgenden Schritten zusammen:
1. Import und Anzeige einer georeferenzierten Karte: Sie kann auf "Google Maps" basieren oder
durch den Import eines georeferenzierten Bildes im Format "GeoTIFF".
2. Definition des Untersuchungsgebietes: Es wird durch die Positionierung einer Reihe von
Punkten konstruiert, die seine Kontur beschreiben. Diese Punkte entsprechen den Eckpunkten
eines Polygons, die sich an der zu bedeckenden Fläche orientieren. Die Kontur kann manuell
Punkt für Punkt oder durch Importieren einer bereits vorhandenen Kontur gezeichnet werden.
3. Definition der Mission: Sie kann automatisch generiert oder manuell erstellt werden.
Robotics Industry SAS – Parc D’Activités du Vert Castel, 3 rue du vert Castel 33700 Mérignac - Siret 751 494 493 00024
6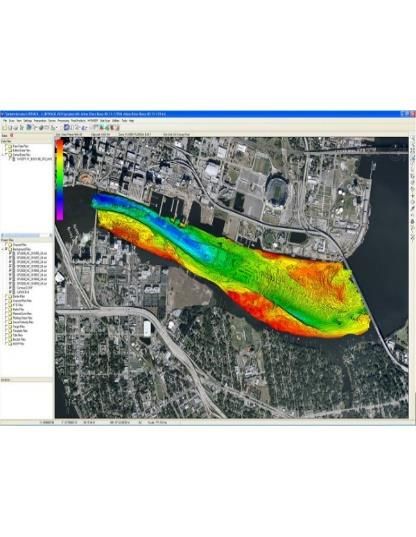
➢ Automatisch generierte Mission: Automatische Anordnung einer Reihe von Kreuzungspunkten,
die eine Route innerhalb des zuvor definierten Untersuchungsgebiets bilden. Der Abstand
zwischen zwei Durchgängen kann eingestellt werden, ebenso wie die Drehung der Straße in
Bezug auf den geografischen Norden.
➢ Manuell gebaute Mission: Manuelle Anordnung der Kreuzungspunkte nacheinander. Jeder
Punkt kann verschoben oder gelöscht werden, bevor die Route validiert wird. Die Reihenfolge
des Durchlaufs der Punkte wird mit der Reihenfolge der Positionierung initialisiert.
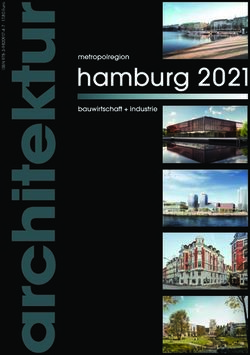
FIGURE 1 : EXEMPLE DANS UNE GRAVIERE
- Anhebung der Kontur der Kiesgruben (violette Linien) und eines Bandes, das sich 10 m vom Rand
entfernt befindet.
- Anheben von Profilen entlang und über ein langes Raster im Abstand von 10 m (gelbe Linien)
Dieser Ansatz ermöglicht es uns beispielsweise, die gekrümmten Bereiche und insbesondere die
kegelförmigen Hänge, die sich aus einem Winkel in die Wasseroberfläche ergeben, mit
ausreichender Genauigkeit darzustellen. Darüber hinaus verbessert es die Genauigkeit der
Kubaturberechnungen.
4. Missionsexport: Nach Abschluss der Missionsvorbereitung kann die Kontur des
Untersuchungsgebietes und der definierten Route auf dem Computer gespeichert und von der
Missionsverfolgungssoftware verwendet werden. Dateien, die Konturen zugeordnet sind, haben
die Erweiterung ".cont", solche, die mit Straßen verknüpft sind, haben die Erweiterung ".rout".
Robotics Industry SAS – Parc D’Activités du Vert Castel, 3 rue du vert Castel 33700 Mérignac - Siret 751 494 493 00024
7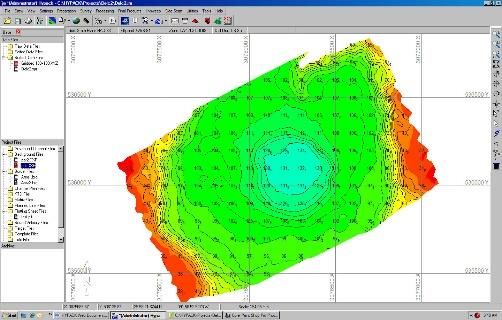
6. VORBEREITUNGSSCHRITTE 8
a. Stationbereitstellung
➢ GPS Initialisierung
➢ PC-Initialisierungssteuerung über HMI
➢ Starten der Steuerungsanwendung
➢ GPS-Erkennungstest
b. Einsatz der UAV:
➢ Installation der ausgewählten Sensoren
➢ Verifizierungskommunikation mit Geräten und Sonden
➢ Starten des Bootes
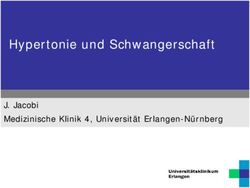
FIGURE 4 : LANCEMENT DU MODE DE NAVIGATION AUTONOME
Robotics Industry SAS – Parc D’Activités du Vert Castel, 3 rue du vert Castel 33700 Mérignac - Siret 751 494 493 00024
8
DRONEO im autonomen Modus verwaltet:
➢ seine Bewegung:
• Abdeckung des Akquisitionsbereichs
• Reisevorhersage
• Fahrwegoptimierung zur Minimierung des Verbrauchs
• Echtzeit-Überwachung auf der PC-Steuerung
➢ seine Energie:
• Kenntnis des Energiestatus,
• Rückkehr zu einer Ladestation, Akkuladung
• Echtzeit-Überwachung auf der PC-Steuerung
➢ Ausfälle:
• Alarmmeldungen an den PC
• Wahl des Ausfallmodus (Shoreline Return, Bojenmodus, Go Home, Stationär)
• Echtzeit-Überwachung auf der PC-Steuerung
Der Benutzer kann den Modus für die manuelle Steuerung über die Bodenstation jederzeit ändern.
Robotics Industry SAS – Parc D’Activités du Vert Castel, 3 rue du vert Castel 33700 Mérignac - Siret 751 494 493 00024
97. Ergebnisermittlung / Nachbearbeitung
Bathymetrie Physico-chimique Hydrosediment
Die Daten aller auf der Drohne installierten Sensoren werden zusammengeführt und auf einer
entscheidungsunterstützenden Software-Schnittstelle wie HYPACK präsentiert.
Wenn die Daten verwertbar und ausreichend sind, ist die Mission beendet.
Die Nachbearbeitung erfolgt dann im Büro, die verschiedenen Renderings und Analysen werden vorbereitet
und in einem Bericht zusammengefasst.
zuverlaessig
robust
genauigkeit
Robotics Industry SAS – Parc D’Activités du Vert Castel, 3 rue du vert Castel 33700 Mérignac - Siret 751 494 493 00024
10Sie können auch lesen