E-Series Spritzgussmaschinen-Schnittstelle (SGMS) - Installationsleitfaden Übersetzung der originalen Anleitungen (de)
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

e-Series
Spritzgussmaschinen-
Schnittstelle (SGMS)
Installationsleitfaden
Übersetzung der originalen Anleitungen (de)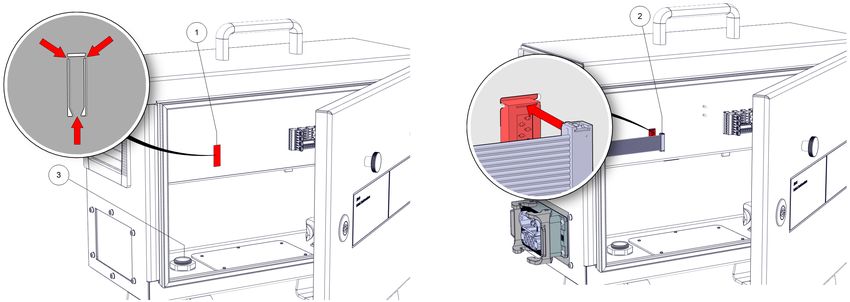
Inhalt
1. Vorwort 1
1.1. Über dieses Dokument 1
1.2. Verpackungsinhalt 1
1.3. Firmendaten 1
2. Sicherheit 2
2.1. Typen von Sicherheitsmeldungen 2
2.2. Allgemeine Sicherheitsmaßnahmen 2
2.3. IMMI-Sicherheitsmaßnahmen 3
2.3.1. Notabschaltung 5
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
2.3.2. Schutzstopp 5
2.4. SGMS-Sicherheitsfunktionen 5
3. Produktbeschreibung 7
3.1. Nutzung des Produkts 7
3.2. Komponenten 7
3.3. Anforderungen 8
4. MAF-Lichtgitter 11
5. Hardware-Installation 12
5.1. Benötigtes Material 12
5.2. Installation des SGMS-Moduls 12
5.3. Verbinden Sie das Flachkabel mit der SGMS 13
5.4. Anschluss der SGM 14
6. Software-Installation 15
6.1. Konfigurieren der SGMS-Modul-Software 15
6.2. Deinstallation des SGMS-Moduls 16
7. IMMI-Modulprogrammierung 17
7.1. Programm-Struktur 17
7.2. Programmstruktur erstellen 18
7.2.1. Programm-Strukturknoten 19
7.2.2. Verwenden der SGMS-Vorlage 24
8. SGMSE/A in regulären Programmknoten 25
8.1. SGMS E/A-Überblick verwenden 25
8.1.1. SGMS E/A-Übersicht 25
e-Series Spritzgussmaschinen-
Installationsleitfaden
Schnittstelle (SGMS)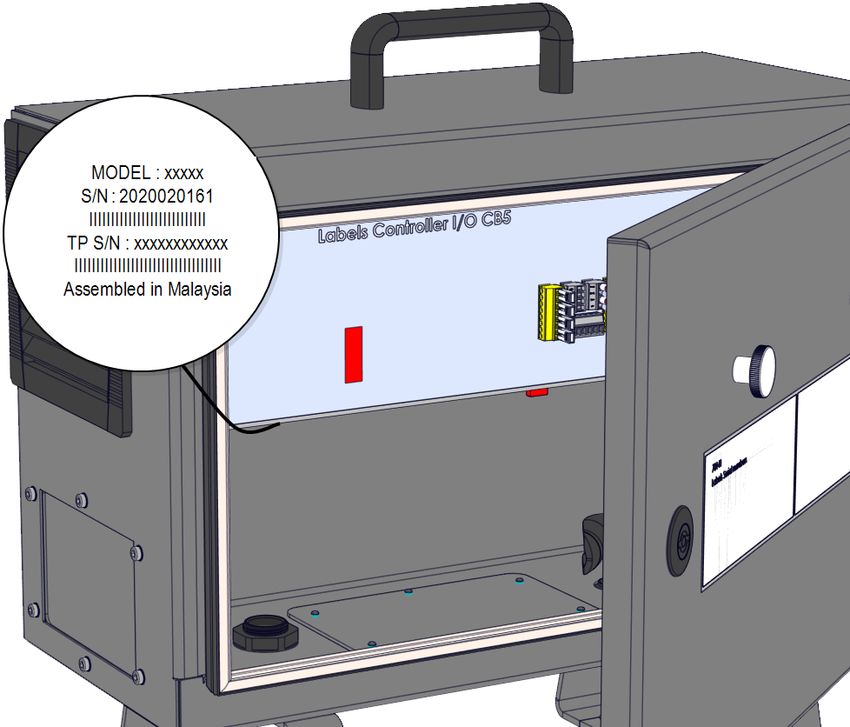
8.1.2. SGMS E/A in regulären Programmknoten verwenden 26
9. Verwendung des Roboters ohne SGM 28
9.1. Anschließen des Bypass-Steckers 28
10. Spezifikationen 29
10.1. Elektrische Spezifikationen 29
11. Copyright und Haftungsausschluss 31
12. Konformität 32
12.1. EUROMAP 67 32
12.2. Versandmaterialien 32
12.3. Qualitätszertifikat 32
12.4. Sicherheitszertifikat 33
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
12.5. TÜV NORD 34
e-Series Spritzgussmaschinen-
Installationsleitfaden
Schnittstelle (SGMS)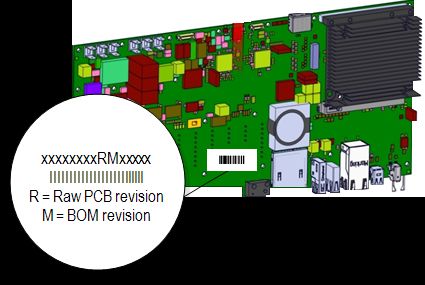
1. Vorwort
1. Vorwort
1.1. Über dieses Dokument
Diese Anleitung beschreibt die Installation eines Universal Robots SGMS-Moduls auf einer
Universal Robots e-Series-Control-Box sowie die Konfiguration der Software für die
Spritzgussmaschinen-Schnittstelle (SGMS) für den Betrieb mit einer Spritzgussmaschine (SGM).
1.2. Verpackungsinhalt
In der Box sind die folgenden Teile enthalten:
• IMMI-Modul
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
• Kabel:
• EUROMAP 67 / SPI AN-146
• Flachkabel
• Erdungsleiter (GND):
• M6-Mutter
• M6-Unterlegscheibe
• Universal Robots EUROMAP 67 Bypass-Stecker
• Dieses Dokument
1.3. Firmendaten
Universal Robots A/S
Energivej 25, 5260 Odense S, Denmark
+45 89 93 89 89
https://www.universal-robots.com
e-Series Spritzgussmaschinen-
Installationsleitfaden 1
Schnittstelle (SGMS)2. Sicherheit
2. Sicherheit
2.1. Typen von Sicherheitsmeldungen
Die Sicherheitsmeldungen in diesem Dokument enthalten Informationen, mit denen Sie
Verletzungen oder Geräteschäden vermeiden können. Dieses Dokument enthält die folgenden
Typen von Sicherheitsmeldungen.
WARNUNG
Diese Sicherheitsmeldung weist auf eine Gefährdungssituation hin, die, wenn nicht
vermieden, zum Tod oder schweren Verletzungen führen kann.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
VORSICHT
Diese Sicherheitsmeldung weist auf eine Gefährdungssituation hin, die, wenn nicht
vermieden, zu leichten oder schweren Verletzungen führen kann.
HINWEIS
Diese Sicherheitsmeldung weist auf eine Situation hin, die, wenn nicht vermieden,
zu Schäden an Ausrüstung oder Eigentum führen kann.
2.2. Allgemeine Sicherheitsmaßnahmen
Dieser Abschnitt enthält allgemeine Sicherheitsmaßnahmen. Lesen Sie diese vor Installation des
SGMS-Kits.
Weitere Informationen zur Sicherheit finden Sie im Abschnitt Sicherheit im Benutzerhandbuch des
Roboters.
WARNUNG
Die Installation oder Wartung eines an eine Stromquelle angeschlossenen Geräts
kann zu einem Stromschlag führen.
• Stellen Sie sicher, dass das Gerät von der Stromquelle getrennt ist, bevor Sie
eine Installation oder Wartung durchführen.
e-Series Spritzgussmaschinen-
2 Installationsleitfaden
Schnittstelle (SGMS)2. Sicherheit
WARNUNG
Ein falscher Anschluss der Stromquelle oder Erdungskabel kann zu Geräte- oder
Personenschäden führen.
Durch einen ungültigen Stromquellenanschluss verursachte Schäden sind nicht
durch die Garantie abgedeckt. Vor dem Start des Betriebs:
• Stellen Sie sicher, dass die Verkabelung der Stromversorgung korrekt ist.
• Stellen Sie sicher, dass die Erdung korrekt ist.
(missing or bad snippet)
WARNUNG
Dieses Produkt beinhaltet den Universal Robots e-Series-Roboters. Allgemeine
Sicherheitsmaßnahmen, die für den Universal Robots e-Series-Roboter gelten,
gelten auch für dieses Produkt.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
Wenn Sie den Roboter nicht wie im Benutzerhandbuch beschrieben verwenden,
kann dies zu Verletzungen führen.
• Weitere Informationen zur Sicherheit finden Sie im Abschnitt Sicherheit im
Benutzerhandbuch des Universal Robots e-Series-Roboters.
2.3. IMMI-Sicherheitsmaßnahmen
Dieser Abschnitt enthält Sicherheitsmaßnahmen in Bezug auf die Installation des SGMS.
WARNUNG
Nicht autorisierte Änderungen am SGMS-Modul können zu Geräte- oder
Personenschäden führen.
• Nur qualifiziertes Personal darf Änderungen durchführen.
• Führen Sie vor und nach der Änderung eine neue Risikobewertung durch.
e-Series Spritzgussmaschinen-
Installationsleitfaden 3
Schnittstelle (SGMS)2. Sicherheit
WARNUNG
Fehlende Schutzvorrichtungen im Werkzeugbereich, die den Zugang verhindern
oder die Anwesenheit im Formbereich erkennen, können zu Geräte- oder
Personenschäden führen.
• Auf der Grundlage der Risikobewertung können Schutzmaßnahmen
erforderlich sein, die mit dem Werkzeugbereich und auch mit der Anwendung
des UR-Roboters verbunden sind.
WARNUNG
Die Signale des Freien Formbereichs sind nicht für die Absicherung gedacht.
• Integrieren Sie den UR Roboter, die SGMS und alle Schutzvorrichtungen in
Übereinstimmung mit den Spezifikationen des Herstellers und den geltenden
Standards.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
• Bringen Sie die Schutzvorrichtung für den Formbereich an, wenn die Gefahr
besteht, dass der Benutzer in die Form greift.
WARNUNG
Wenn die Bewegung zwischen dem Roboterarm und dem SGM nicht
ordnungsgemäß koordiniert wird, kann dies zu Geräte- oder Personenschäden
führen.
• Machen Sie sich bitte mit der EUROMAP 67-Empfehlung vertraut.
• Machen Sie sich bitte mit dem SGMS-Modul-Benutzerhandbuch vertraut.
• Integrieren Sie den UR Roboter, die SGMS und alle Schutzvorrichtungen in
Übereinstimmung mit den Spezifikationen des Herstellers und den geltenden
Standards.
HINWEIS
Das Trennen des Flachbandkabels bei eingeschalteter Control-Box kann zu
Geräteschäden führen.
• Schalten Sie die Control-Box aus, bevor Sie das Flachkabel abziehen.
HINWEIS
Ein nicht ordnungsgemäßer Anschluss des Erdungsleiters (GND) während der
Installation kann zu Geräteschäden führen.
• Schließen Sie das Erdungskabel an die Control-Box an, bevor Sie das
Flachkabel anschließen.
e-Series Spritzgussmaschinen-
4 Installationsleitfaden
Schnittstelle (SGMS)2. Sicherheit
2.3.1. Notabschaltung
Der Roboter und die SGM senden sich über die SGMS gegenseitig Sicherheitssignale für die
Notabschaltung. Wenn die UR-Notabschaltung ausgelöst wird, wird der Roboter gestoppt und das
SGMS signalisiert einen Stopp an die SGM.
WARNUNG
Stellen Sie sicher, dass alle Notabschaltungen die gesamte Anwendung stoppen,
bevor Sie die Anwendung bedienen.
2.3.2. Schutzstopp
Wenn der UR Roboter-Schutzstopp von der SGM ausgelöst wird, hält der Roboter an.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
WARNUNG
Das Greifen in den SGM-Arbeitsbereich kann zu schweren Personenschäden
führen.
• Integrieren Sie Sicherungsvorrichtungen zum Schutz des Personals, ohne
sich auf die nicht sicherheitsrelevanten Signale des SGMS verlassen zu
müssen.
2.4. SGMS-Sicherheitsfunktionen
Dieser Abschnitt enthält Informationen zu den vom SGMS unterstützten Sicherheitsfunktionen. Im
Folgenden werden die UR-SGMS-Sicherheitsausgänge beschrieben. Wenden Sie sich an den
SGM-Hersteller, um Einzelheiten zur funktionalen Sicherheit der SGM zu erfahren.
Diese Sicherheitsfunktionen entsprechen ISO 13849-1 und den Steckerbelegungen von EUROMAP
67 / SPI AN-146.
UR-
Kat./PL PFHd
Sicherheitsfunktion
Notabschaltung 3/d 2,33E-7
Schutz- 3/d 2,01E-7
stopp
e-Series Spritzgussmaschinen-
Installationsleitfaden 5
Schnittstelle (SGMS)2. Sicherheit
Sicherheitsfunktion 1
Notabschaltung: Bidirektional
Name Notabschaltung.
Typ UR-Roboter: Stoppkategorie 1 gemäß IEC 60204-1.
SGM: Siehe SGM-Handbuch.
Auslösendes Ereignis UR-Roboter: Not-Aus-Schalter wird gedrückt; Stopp wird durch SGM
ausgelöst.
SGM: Siehe SGM-Handbuch.
Reaktion UR-Roboter: Stoppkategorie 1 gemäß IEC 60204-1.
SGM: Siehe SGM-Handbuch.
Sicherer Status UR-Roboter: Die Antriebsleistung des Roboters wird unterbrochen; die
SGM wird über die SGMS angehalten.
SGM: Siehe SGM-Handbuch.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
Verwendungszweck Abschaltung aller gefährlichen Maschinenfunktionen und Unterbrechen
der Stromversorgung.
Sicherheitsfunktion 2
UR-Schutzstopp-Eingang von der SGM
Name Schutzstopp.
Typ Zur Absicherung (Schutz) des Personals vor SGM-Risiken.
Auslösendes Ereignis Die SGM-Sicherheitsausgänge ändern ihren Zustand und lösen dadurch
einen Sicherheitsstopp für den UR-Roboter aus.
Reaktion und Der Roboter hält an, wenn die Stromversorgung des UR-Roboters
Verhalten bei unterbrochen wird. Siehe SGM-Handbuch, um die Reaktion der SGM und
Stromausfall der Absicherung bei Stromausfall der SGM oder der SGM-Absicherung
zu bestimmen.
Sicherer Status Der Roboter bewegt sich nicht und befindet sich in einem überwachten
Stillstand (Stopp-Kategorie 2 gemäß IEC 60204-1).
Verwendungszweck SGM-Absicherung.
e-Series Spritzgussmaschinen-
6 Installationsleitfaden
Schnittstelle (SGMS)3. Produktbeschreibung
3. Produktbeschreibung
Die e-Series e-Series Spritzgussmaschinen-Schnittstelle (SGMS) ist eine Industrielösung für das
Verbinden einer Universal Robots e-Series Control-Box mit einer Spritzgussmaschine.
WARNUNG
Wenn die e-Series Spritzgussmaschinen-Schnittstelle (SGMS) nicht
ordnungsgemäß angeschlossen wird, kann dies zum Tod oder zu schweren
Verletzungen führen.
• Installieren Sie das SGMS-Modul ordnungsgemäß, um die regulatorischen
Anforderungen zu erfüllen.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
HINWEIS
Wird die Installation der e-Series Spritzgussmaschinen-Schnittstelle (SGMS) nicht
ordnungsgemäß durchgeführt, kann das zu Schäden an Ausrüstung oder Eigentum
führen.
3.1. Nutzung des Produkts
Die Zertifizierung für dieses Produkt ist nur gültig für die Stopp-Schnittstelle der e-Series
Spritzgussmaschinen-Schnittstelle (SGMS) mit Universal Robots e-Series Control-Boxes, die nach
dem 1. Februar 2020 hergestellt wurden, bei denen die Control-Boxes über die SGMS-Schnittstelle
aktualisiert werden und mit den EMC-Bestimmungen in Einklang sind.
Die Spezifikationen zur funktionalen Sicherheit gelten für die UR-Stopp-Ausgänge des SGMS. Die
Spezifikationen für die integrierte funktionale Sicherheit liegen in der Verantwortung des Integrators,
da diese auch die Spezifikationen der Spritzgussmaschine umfassen.
3.2. Komponenten
Die e-Series Spritzgussmaschinen-Schnittstelle (SGMS) besteht aus den folgenden Komponenten:
• e-Series SGMS-Modul
• e-Series SGMS-Kabel
Die Anwendung der e-Series Spritzgussmaschinen-Schnittstelle (SGMS) besteht aus den
folgenden Komponenten:
• Spritzgussmaschine gemäß EUROMAP 67 / SPI AN-146.
• Universal Robots e-Series Roboter, bestehend aus einem kooperativen Roboterarm und
e-Series Spritzgussmaschinen-
Installationsleitfaden 7
Schnittstelle (SGMS)3. Produktbeschreibung
einer UR e-Series Control-Box (mit Rev. F2 Sicherheitssteuerungsplatine).
• e-Series SGMS-Modul, einschließlich SGMS-Modul und SGMS-Kabel.
• Roboter-Endeffektoren, z. B. Greifer.
3.3. Anforderungen
Die Seriennummer der Control-Box muss neuer sein als 2020020161. Die Hardware-Revision der
Sicherheitssteuerungsplatine ist Rev.F2.
HINWEIS
Die Installation einer e-Series Spritzgussmaschinen-Schnittstelle (SGMS) in einer
Control-Box mit einer Seriennummer niedriger als 2020020161 kann zu Schäden an
Ausrüstung oder Eigentum führen.
• Überprüfen Sie vor der Installation des SGMS-Moduls die Seriennummer
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
Ihrer Control-Box.
• Sie können Ihre Sicherheitssteuerungsplatine bei Bedarf überprüfen.
Control-Box
Die Seriennummer der Control-Box befindet sich auf der Unterseite der Control-Box-Halterung. Die
folgende Abbildung zeigt die Kennzeichnung und Seriennummer der Control-Box.
e-Series Spritzgussmaschinen-
8 Installationsleitfaden
Schnittstelle (SGMS)3. Produktbeschreibung
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
Sicherheitssteuerungsplatine
Die Seriennummer der Sicherheitssteuerungsplatine befindet sich auf deren Rückseite. Sie müssen
die Halterung für die Control-Box demontieren, um auf die Rev. F2 Sicherheitssteuerungsplatine (F2
= RM) zuzugreifen.
e-Series Spritzgussmaschinen-
Installationsleitfaden 9
Schnittstelle (SGMS)3. Produktbeschreibung
HINWEIS
Weitere Informationen zur Änderung der Sicherheitssteuerungsplatine finden Sie im
Kapitel zur Control-Box im Wartungshandbuch auf der Support-Webseite:
• https://www.universal-robots.com/support/
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
e-Series Spritzgussmaschinen-
10 Installationsleitfaden
Schnittstelle (SGMS)4. MAF-Lichtgitter
4. MAF-Lichtgitter
Dieser Abschnitt beschreibt die EUROMAP-Nutzung eines MAF-Lichtgitters.
WARNUNG
Die Signale SGMS Werkzeugbereich frei (MAF) sind nicht für die Absicherung von
Personal gedacht.
• Bringen Sie die Schutzvorrichtung an, wenn die Gefahr besteht, dass der
Benutzer in die Form greift.
• Integrieren Sie die Sicherheitsvorrichtung in Übereinstimmung mit den
geltenden Standards wie z. B.: IEC 62046, ISO 13855.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
HINWEIS
Die Nichtverwendung eines MAF-Lichtgitters kann zu einer ungeplanten
Formschließung führen, was zu Geräteschäden führen kann.
• Verwenden Sie die SGMS, um bei Verwendung den Zustand des MAF-
Lichtgitters zu signalisieren.
HINWEIS
Die über den MAF-Anschluss am SGMS-Modul verfügbare 24 V-Stromversorgung
ist strombegrenzt. Das Überschreiten des vorgeschriebenen Ausgangsstroms kann
zu einem Stopp führen.
Das Signal des MAF-Lichtgitters dient nicht der Sicherheit, sondern stellt lediglich ein Statussignal
für die SGM dar.
Schließen Sie das MAF über den dedizierten digitalen MAF-Eingangsanschluss am SGMS-Modul
an. Der MAF-Eingang ist ein PNP-Typ. Einmal angeschlossen, ist der MAF-Eingang HIGH, wenn
das Lichtgitter nicht blockiert ist.
e-Series Spritzgussmaschinen-
Installationsleitfaden 11
Schnittstelle (SGMS)5. Hardware-Installation
5. Hardware-Installation
Dieser Abschnitt beschreibt, wie die IMMI-Modul-Hardware installiert wird. Weitere Informationen
über die Konfiguration der IMMI-Modul-Software finden Sie unter 6. Software-Installation auf
Seite 15.
5.1. Benötigtes Material
Um das IMMI-Modul zu installieren, bemötigen Sie folgendes Material:
• Eine M 6-Mutter
• Eine M6-Unterlegscheibe
• Ein TX20-Torx-Schraubenzieher
• Ein Teppichmesser mit einer Klinge von 2,5 cm (max.)
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
• Schneidzange
5.2. Installation des SGMS-Moduls
Für die Installation des SGMS-Moduls
1. Schalten Sie die Control-Box ab und trennen Sie das Netzkabel von der Stromquelle.
2. Entfernen Sie die Abdeckplatte an der Seite der Control-Box.
Bewahren Sie die Schrauben und die Zahnscheiben auf, diese werden für die Installation der
Hardware benötigt.
1 Schraube 2 Zahnscheibe
3 Entfernte Platte 4 SGMS-Modul
e-Series Spritzgussmaschinen-
12 Installationsleitfaden
Schnittstelle (SGMS)5. Hardware-Installation
3. Richten Sie das SGMS-Modul so aus, dass sich alle Anschlüsse oben befinden, und
verwenden Sie die Schrauben und Zahnscheiben der Control-Box-Platte, um so das Modul
von der Innenseite der Control-Box aus zu befestigen.
HINWEIS
Ziehen Sie die Schrauben der Control-Box-Platte mit 1,5 Nm an, um
Sachschäden zu vermeiden.
4. Verbinden Sie mit der M6-Mutter und der M6-Unterlegscheibe den Erdungsleiter mit dem
SGMS-Modul und der Control-Box.
5.3. Verbinden Sie das Flachkabel mit der SGMS
VORSICHT
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
Durch Entfernen des perforierten Streifens können scharfe Kanten freigelegt
werden, die zu Verletzungen führen können.
• Gehen Sie mit dem entfernten Streifen behutsam um.
HINWEIS
Werden scharfe und/oder Flachklingenwerkzeuge zu weit in den
ERWEITERUNGSBUS eingeführt, kann das zu Sachschäden führen.
• Führen Sie scharfe und/oder Flachklingenwerkzeuge vorsichtig in den
ERWEITERUNGSBUS ein.
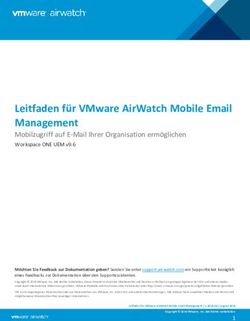
Zum Verbinden des Flachkabels mit der SGMS
1. Schneiden Sie mit dem Teppichmesser den ERWEITERUNGSBUS-Teil des Control-Box-
Etiketts ab und durch den perforierten Streifen.
2. Entfernen Sie mit dem Teppichmesser oder der Schneidzange den perforierten Streifen und
legen Sie den Verbindunganschluss des ERWEITERUNGSBUS frei.
3. Schließen Sie ein Ende des Flachkabels an den soeben freigelegten Anschluss vom
ERWEITERUNGSBUS an.
4. Verbinden Sie das andere Ende des Flachkabels mit dem Verbindungsanschluss der Control-
Box.
e-Series Spritzgussmaschinen-
Installationsleitfaden 13
Schnittstelle (SGMS)5. Hardware-Installation
1 Verbindungsanschluss des 2 Flachkabel
ERWEITERUNGSBUS
3 Erdungsverbindung
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
HINWEIS
Eine falsche Flachkabelverbindung kann zu Sachschäden führen.
• Stellen Sie sicher, dass das Flachkabel mit der Linie oben auf dem
Verbindungsanschluss des ERWEITERUNGSBUS ausgerichtet ist.
5.4. Anschluss der SGM
Zum Verbinden der SGM
1. Verbinden Sie den SGM-Stecker mit dem SGMS-Modul und rasten Sie die
Sicherheitsverschlüsse ein.
2. Oder verbinden Sie den EUROMAP 67 Bypass-Stecker mit dem SGMS-Modul und rasten Sie
die Klemmen ein. Siehe 9. Verwendung des Roboters ohne SGM auf Seite 28.
3. Schließen Sie das Netzkabel an die Stromquelle an und schalten Sie die Control-Box ein.
4. Warten Sie auf die Meldung in PolyScope, dass die SGMS in den Sicherheitseinstellungen
aktiviert werden muss.
e-Series Spritzgussmaschinen-
14 Installationsleitfaden
Schnittstelle (SGMS)6. Software-Installation
6. Software-Installation
Dieser Abschnitt beschreibt, wie die SGMS-Modul-Hardware konfiguriert wird. Weitere
Informationen über das Installieren der IMMI-Modul-Hardware finden Sie unter 5. Hardware-
Installation auf Seite 12.
6.1. Konfigurieren der SGMS-Modul-Software
Zum Konfigurieren der SGMS-Modul-Software
1. Tippen Sie in PolyScope in der Kopfzeile auf „Installation“ und wählen Sie Sicherheit.
2. Tippen Sie auf Hardware und entsperren Sie die Optionen im Bildschirm Verfügbare
Hardware auswählen.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
Um diesen Bildschirm zu entsperren ist ein Passwort erforderlich.
3. Wählen Sie in der Dropdownliste Schnittstelle für Spritzgussmaschine die gewünschte
Empfehlung aus.
4. Tippen Sie auf Anwenden, um das System neu zu starten. PolyScope wird weiterhin
ausgeführt.
5. Tippen Sie auf Sicherheitskonfiguration bestätitgen, um die SGMS-Software-Installation
abzuschließen.
e-Series Spritzgussmaschinen-
Installationsleitfaden 15
Schnittstelle (SGMS)6. Software-Installation
6.2. Deinstallation des SGMS-Moduls
Zum Deinstallieren des SGMS-Moduls
1. Verwenden Sie in PolyScope Ihr Passwort für den Zugriff auf den Bildschirm Verfügbare
Hardware auswählen.
2. Wählen Sie in der Dropdownliste Schnittstelle für Spritzgussmaschine die Option Keine.
3. Tippen Sie auf Anwenden, um das System neu zu starten. PolyScope wird weiterhin
ausgeführt.
4. Tippen Sie auf Sicherheitskonfiguration bestätigen.
5. Schalten Sie die Control-Box ab und trennen Sie das Netzkabel von der Stromquelle.
6. Trennen Sie den SGM-Stecker vom SGMS-Modul.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
7. Demontieren Sie die Schnittstelle.
• Entfernen Sie das Flachkabel.
• Entfernen Sie die M6-Mutter, um den Masseverbinder zu trennen.
• Entfernen Sie die M6-Schrauben und Zahnscheiben, um das SGMS-Modul zu
entfernen.
• Befestigen Sie die Platte mit den M6-Schrauben und den Zahnscheiben wieder an der
Control-Box.
e-Series Spritzgussmaschinen-
16 Installationsleitfaden
Schnittstelle (SGMS)7. IMMI-Modulprogrammierung
7. IMMI-Modulprogrammierung
Dieser Abschnitt beschreibt die Programmstrukturfunktion und die Erstellung von
Programmstrukturen unter Verwendung der in der SGMS verfügbaren Knoten.
7.1. Programm-Struktur
Die Programmstrukturen sind Knoten, die in Programme eingefügt werden, um eine
ordnungsgemäße und sichere Interaktion mit der SGM zu erreichen. Sie alle beinhalten
Signalüberprüfungstests. Sie können mit den Programmknoten auch sicherzustellen, dass die E/A-
Signale zum und von der SGM korrekt konfiguriert sind.
Ein Programmknoten kann mehrere Ausgänge in einer Aktion einstellen.
Um mit der Erstellung einer Programmstruktur für die SGM zu beginnen, wählen Sie einen der in der
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
Liste unter der SGMS verfügbaren Programmknoten aus, wie unten dargestellt.
Alle Programmstrukturen bestehen aus einer Reihe von Schritten. Die meisten Schritte sind
standardmäßig deaktiviert. Einige Schritte können nicht deaktiviert werden, da sie für die
Programmstrukturfunktion wesentlich sind.
e-Series Spritzgussmaschinen-
Installationsleitfaden 17
Schnittstelle (SGMS)7. IMMI-Modulprogrammierung
Allgemeine Schrittsätze
Schritt
Funktion
festgelegt
Test Das Programm hält an, wenn die Prüfbedingung nicht eingehalten wird.
Ausgang
Der festgelegte Ausgang ist entweder auf HIGH oder LOW eingestellt.
einstellen
Erlaubt dem Programm zu warten, bis eine Bewegung beendet ist, bevor es das
Warten bis
Programm fortsetzt.
7.2. Programmstruktur erstellen
Zum Erstellen einer Programmstruktur
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
1. Tippen Sie in PolyScope in der Kopfzeile auf „Programm“ und wählen Sie SGMS.
2. Wählen Sie den ersten gewünschten Programmstrukturknoten aus den unten aufgeführten
Optionen aus.
Sie können so viele Knoten auswählen, wie für Ihr Programm erforderlich sind.
• Startprüfung: Stellen Sie sicher, dass der Roboter und die SGM korrekt eingestellt sind,
bevor das Formen beginnt.
• Auf Werkstück warten: Roboter wartet auf die Bereitstellung eines SGM-Werkstücks.
• Auswerfer zurück: Der Auswerfer kehrt zurück in Position.
• Auswerfer vor: Der Auswerfer entfernt ein Werkstück aus der Form.
• Kernzüge ein: Wählen Sie aus, welche Kernzüge in Position 1 bewegt werden.
• Kernzüge aus: Wählen Sie aus, welche Kernzüge in Position 2 bewegt werden.
• Formbereich frei: Signale zur SGM für den Beginn der Formung
• Vorlage: Verwendet eine vordefinierte Programmstruktur
3. Markieren Sie unter Befehl die relevanten Kontrollkästchen für die einzelnen
Programmknoten, um sie zu aktivieren/deaktivieren.
Die Kontrollkästchen, die Sie markieren, bilden den Satz der Aktionen, die der
Programmknoten ausführt. Dies wird im Folgenden veranschaulicht.
e-Series Spritzgussmaschinen-
18 Installationsleitfaden
Schnittstelle (SGMS)7. IMMI-Modulprogrammierung
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
Die folgenden Unterabschnitte veranschaulichen und beschreiben die einzelnen
Programmstrukturknoten.
7.2.1. Programm-Strukturknoten
Sie können die Schrittsätze in jedem Knoten konfigurieren, indem Sie die Kontrollkästchen zum
Aktivieren/Deaktivieren einzelner Schritte verwenden.
e-Series Spritzgussmaschinen-
Installationsleitfaden 19
Schnittstelle (SGMS)7. IMMI-Modulprogrammierung
• Startprüfung: Einmal zu Beginn eines Roboterprogramms eingesetzt, stellt dieser Knoten
sicher, dass Roboter und Maschine vor dem Start des Formvorgangs richtig eingestellt sind.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
• Auf Werkstück warten: Dient dazu, den Roboter warten zu lassen, bis ein Werkstück aus der
SGM fertig ist.
e-Series Spritzgussmaschinen-
20 Installationsleitfaden
Schnittstelle (SGMS)7. IMMI-Modulprogrammierung
• Auswerfer zurück: Ermöglicht das Zurückkehren des Auswerfers in Position.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
• Auswerfer vorwärts: Ermöglicht das Zurückkehren des Auswerfers für das Entfernen eines
Werkstücks aus der Form. Sollte eingesetzt werden, wenn der Roboter in einer Position ist,
um die Werkstücke zu greifen.
e-Series Spritzgussmaschinen-
Installationsleitfaden 21
Schnittstelle (SGMS)7. IMMI-Modulprogrammierung
• Kernzug in: Ermöglicht die Bewegung der Kernzüge zu Position 1. Welche Kernzüge
verwendet werden, wird aus dem Auswahlmenü ausgewählt.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
• Kernzüge aus: Ermöglicht die Bewegung der Kernzüge zu Position 2. Welche Kernzüge
verwendet werden, wird aus dem Auswahlmenü ausgewählt.
e-Series Spritzgussmaschinen-
22 Installationsleitfaden
Schnittstelle (SGMS)7. IMMI-Modulprogrammierung
• Formbereich frei: Signale zur SGM, dass der Beginn des Formungsvorgangs erlaubt ist.
Wenn das Signal aktiviert wird, muss der Roboter außerhalb der IMM angeordnet werden.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
• Vorlage: Verwendet eine vordefinierte Programmstruktur, um eine einfache Interaktion mit
der SGM durchzuführen.
e-Series Spritzgussmaschinen-
Installationsleitfaden 23
Schnittstelle (SGMS)7. IMMI-Modulprogrammierung
7.2.2. Verwenden der SGMS-Vorlage
Zum Verwenden der SGMS-Vorlage
1. Tippen Sie in PolyScope in der Kopfzeile auf „Programm“ und wählen Sie SGMS.
2. Wählen Sie Vorlage, damit der Programmbildschirm mit der geladenen Vorlage erscheint. Die
Vorlagenstruktur wird auf der linken Seite des Bildschirms angezeigt, wie unten abgebildet.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
3. Um den Roboter auf die Umschlagung von Objekten vorzubereiten, wählen Sie unten die
gewünschten Wegepunkte aus:
• Waypoint_Start: Startpunkt des Roboterarms vor Beginn der Prozess des Spritzgusses
beginnt.
• Waypoint_Wait: Roboterarm-Wartepunkt.
• Waypoint_Take: Roboterarm entfernt Werkstück von SGM-Punkt.
• WP_Drop_Bad: Roboterarm löst abgelehnten Werkstückpunkt.
• WP_Drop_Good:Roboterarm löst akzeptieren Werkstückpunkt.
4. Wählen Sie einen der folgenden Knoten aus und passen Sie ihn an, um einen Greifer zu
steuern:
• Einstellen: Bestimmt den Griff und das Lösen von Positionen.
• Schleife: Starten Sie den Roboter nur dann, wenn das Werkstück von der SGM entfernt
werden muss.
• MoveJ: Anpassung der Bewegungsgeschwindigkeit an die SGM-Zykluszeit.
5. Passen Sie im „Bewegen“-Knoten die Gelenkgeschwindigkeit und Gelenkbeschleunigung an,
um sie an die Zerbrechlichkeit von Werkstücken anzupassen.
e-Series Spritzgussmaschinen-
24 Installationsleitfaden
Schnittstelle (SGMS)8. SGMSE/A in regulären Programmknoten
8. SGMSE/A in regulären
Programmknoten
Dieser Abschnitt beschreibt die Verwendung von SGMS-Ein- und Ausgängen in regulären
Programmknoten.
8.1. SGMS E/A-Überblick verwenden
Der SGMS E/A-Bildschirm bietet Indikatoren für Eingangssignale und Optionen für die Steuerung
der Ausgabesignale. Die Optionen zur Steuerung der Ausgangssignale stehen standardmäßig nur
im Programmiermodus des Roboters zur Verfügung. Dieser kann nach Bedarf über den Tab E/A-
Einstellung im Installationsbildschirm erneut konfiguriert werden.
Bei Inbetriebnahme sind die 24 V-Signale hoch. Alle anderen Signale sind niedrig.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
Im Automatikmodus sind alle Signale standardmäßig High.
8.1.1. SGMS E/A-Übersicht
• Steuerung
Diese Signale werden von den Programmstrukturen für die Steuerung der Interaktion
zwischen Roboter und SGM verwendet.
• Der freie Formbereich (MAF) kann nicht in der Roboter-Spaltenanzeige gesteuert werden.
Der MAF-Ausgang wird unter der Bedingung auf HIGH gestellt, dass das elektrische
Überwachungssignal des Formbereichs und das MAF-Signal der Software beide HIGH sind.
Das MAF-Signal von der Software kann über die entsprechende Schaltfläche gesteuert
werden.
• Status: Mit diesen Signalen werden die Betriebsmodi und das SGM des Roboters angezeigt
und gesteuert. Die Balken für die Spannungs- und Stromverbräuche zeigen die Werte an, mit
denen die SGM und ggf. ein Lichtgitter durch das SGMS Modul versorgt werden.
e-Series Spritzgussmaschinen-
Installationsleitfaden 25
Schnittstelle (SGMS)8. SGMSE/A in regulären Programmknoten
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
• Herstellerabhängig: Diese Signale sind optional und können nach Ermessen des SGM-
Herstellers zu bestimmten Zwecken verwendet werden.
• Sicherheit
In der Roboter-Spalte kann die Anzeige der Notabschaltung nicht über diesen Bildschirm
gesteuert werden. Es wird lediglich angezeigt, dass sich der Roboter in einem „Nothalt“-
Zustand befindet.
Das Notabschaltungssignal der Maschine zeigt an, ob die SGM durch eine Notabschaltung
angehalten wurde. Der Eingang „Schutz offen“ zeigt den Status der Signale von
Sicherheitsgeräten gemäß Vorgabe im EUROMAP 67-Standard an.
Wenn eine Programmstruktur keine E/A-Signale enthält, aber dennoch für die Verwendung in einem
Roboterprogramm vorgesehen ist, können Sie die im folgenden Abschnitt beschriebenen Knoten
„Aktion“ und „Warten“ verwenden.
8.1.2. SGMS E/A in regulären Programmknoten verwenden
Warten
1. Tippen Sie in PolyScope in der Kopfzeile auf Programm.
2. Tippen Sie unter Basis auf Warten.
3. Wählen Sie im Befehlsfenster unter „Warten“ Auf Digitaleingang warten, um auf die SGM-
Eingangsoptionen zuzugreifen.
e-Series Spritzgussmaschinen-
26 Installationsleitfaden
Schnittstelle (SGMS)8. SGMSE/A in regulären Programmknoten
Einstellen
1. Tippen Sie in PolyScope in der Kopfzeile auf Programm.
2. Tippen Sie unter Basis auf Einstellen.
3. Wählen Sie im Befehlsfenster unter „Auswählen“ eine der folgenden Optionen
• Digitalausgang setzen: Wählen Sie aus einer Liste von Ausgängen vom Roboter zur
SGM.
• Einstellen: Wählen Sie Ausgänge und verwenden Sie Ausdrücke zusammen.
• Einzelimpuls einstellen: Wählen Sie die Ausgänge und definieren Sie die Pulsdauer.
Ausdruck
Sie können von verschiedenen Knoten aus auf den Ausdruck-Editor zugreifen.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
1. Tippen Sie auf den gewünschten Knoten und wählen Sie das Textfeld f(x), um den
Ausdrucks-Editor zu öffnen.
HINWEIS
Weitere Informationen finden Sie im Benutzerhandbuch des Roboters, das auf der
Support-Website verfügbar ist:
• https://www.universal-robots.com/support/
e-Series Spritzgussmaschinen-
Installationsleitfaden 27
Schnittstelle (SGMS)9. Verwendung des Roboters ohne SGM
9. Verwendung des Roboters ohne SGM
Dieser Abschnitt beschreibt, wie Sie einen mit SGMS konfigurierten Roboter ohne SGM verwenden.
Das Trennen des SGM vom SGMS-Modul löst alle Notabschaltungen aus, die den Roboter
unbrauchbar machen. Ein Bypass-Stecker schließt die Not- und Schutzsignale. Verwenden Sie den
Bypass-Stecker, damit der Roboter normal funktioniert, ohne mit der SGM verbunden zu sein.
Die IP-Schutzart der Control-Box bleibt erhalten, wenn der Bypass-Stecker angeschlossen wird.
9.1. Anschließen des Bypass-Steckers
Zum Verbinden des Bypass-Steckers
1. Lösen Sie die Sicherheitsklemmen und ziehen Sie die SGM vom SGMS-Modul ab.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
2. Versuchen Sie nicht, die in PolyScope angezeigte Meldung „System-Notabschaltung“ zu
löschen.
3. Stecken Sie den Bypass-Stecker in das SGMS-Modul und rasten Sie die Sicherheitsklemmen
ein.
4. Tippen Sie in PolyScope aufZum Initialisierungsbildschirm, um den Roboter zu starten.
e-Series Spritzgussmaschinen-
28 Installationsleitfaden
Schnittstelle (SGMS)10. Spezifikationen
10. Spezifikationen
10.1. Elektrische Spezifikationen
MAF, nicht sicherheitsrelevant
Parameter Min Typ Max Einheit
24-V-Spannungstoleranz -10% – 10% V
Verfügbarer Strom von der 24 V-Versorgung – – 750 mA
Überlastschutz – 2 – A
MAF-Eingangshochspannung* 11 – – V
MAF-Eingangsniedrigspannung* – – 5 V
MAF Eingangsspannungsbereich* -0,4 – 36 V
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
MAF-Eingangsstrom bei 24 V-Eingangsspannung – 11 – mA
*Bezogen auf Erdung (GND) vom SGMS.
Stopp E/A, sicherheitsrelevante Signale
Die Ausgangssignale der Notabschaltung werden durch zwangsgesteuerte Sicherheitsrelais gemäß
EN 50205 gesteuert. Die Schaltkontakte sind galvanisch von allen anderen Signalen getrennt und
entsprechen IEC 60664-1 Verschmutzungsgrad 2, Überspannungsklasse II.
Parameter Min Typ Max Einheit
ZA1-ZA4 Spannung* 22 24 26 V
ZC1-ZC4 Eingangsstrom (jeder Ausgang) bei 24 V
– 11 – mA
Eingangsspannung
ZC1-ZC4 Eingangsspannungsbereich* -0,4 – 36 V
ZC1-ZC4 Eingangshochspannung* 11 – – V
ZC1-ZC4 Eingangsniedrigspannung* – – 5 V
A1-C1 A2-C2 A3-C3 Strom AC/DC 0,01 – 6 A
A1-C1 A2-C2 A3-C3 Spannung DC 5 – 50 V
A1-C1 A2-C2 A3-C3 Spannung AC 5 – 250 V
*Bezogen auf Erdung (GND) vom SGMS.
Digitaleingänge, nicht sicherheitsrelevant
Die digitalen Eingänge werden als pnp-Typ umgesetzt und galvanisch mit der Control-Box
verbunden. Die Eingänge werden in Übereinstimmung mit allen drei definierten digitalen
Eingangstypen aus IEC 61131-2 gebaut.
Parameter Min Typ Max Einheit
Eingangsstrom bei 24 V-Eingangsspannung – 11 – mA
e-Series Spritzgussmaschinen-
Installationsleitfaden 29
Schnittstelle (SGMS)10. Spezifikationen
Parameter Min Typ Max Einheit
Eingangsspannungsbereich* -0.4 – 36 V
Eingangshochspannung* 11 – – V
Eingangsniedrigspannung* – – 5 V
*Bezogen auf Erdung (GND) vom SGMS.
Digitalausgänge, nicht sicherheitsrelevant
Die digitalen Ausgänge werden als pnp-Typ umgesetzt und galvanisch mit der SGM verbunden. Die
galvanische Trennung zwischen den Spannungen der IMM und des Roboters entspricht IEC 60664-
1 Verschmutzungsgrad 2, Überspannungsklasse II. Die Ausgänge erfüllen IEC 61131-2.
Parameter Min Typ Max Einheit
Quellstrom pro Ausgang 0 – 200 mA
Spannungsabfall wenn EIN 0 70 300 V
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
e-Series Spritzgussmaschinen-
30 Installationsleitfaden
Schnittstelle (SGMS)11. Copyright und Haftungsausschluss
11. Copyright und Haftungsausschluss
Die hier enthaltenen Informationen sind Eigentum von Universal Robots A/S und dürfen nur im
Ganzen oder teilweise vervielfältigt werden, wenn eine vorherige schriftliche Genehmigung von
Universal Robots A/S vorliegt. Diese Informationen können jederzeit und ohne vorherige
Ankündigung geändert werden und sind nicht als Verbindlichkeit von Universal Robots A/S
auszulegen. Dieses Dokument wird regelmäßig geprüft und überarbeitet.
Universal Robots A/S übernimmt keinerlei Verantwortung für jedwede Fehler oder Auslassungen
in diesem Dokument.
Copyright © 2019–2021 by Universal Robots A/S.
Das Logo von Universal Robots ist eine eingetragene Handelsmarke von Universal Robots A/S.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
HINWEIS
Universal Robots arbeitet weiter an der Verbesserung der Zuverlässigkeit und dem
Leistungsvermögen seiner Produkte und behält sich daher das Recht vor, das
Produkt ohne vorherige Ankündigung zu aktualisieren. Universal Robots unternimmt
alle Anstrengungen, dass der Inhalt dieses Dokuments genau und korrekt ist,
übernimmt jedoch keine Verantwortung für jedwede Fehler oder fehlende
Informationen.
Universal Robots schließt jede Haftung aus, auch dann, wenn alle Richtlinien in
diesem Dokument eingehalten werden.
HINWEIS
Die Universal Robots e-Series Spritzgussmaschinen-Schnittstelle (SGMS) wurde in
Übereinstimmung mit Euromap 67, Version 1.11 (Ausgabe Mai 2015) und SPI
AN146, The Society of the Plastics Industry, Publikationsnummer AN146 (März
2006) entwickelt.
Universal Robots lehnt hiermit jegliche Haftung in Bezug auf die SGM und ihr Signal
an die SGMS ab, einschließlich der Stoppsignale und ihrer Handhabung der
Stoppsignale von Universal Robots, da Universal Robots keine Kenntnis darüber
hat, ob die SGM in Übereinstimmung mit den oben genannten Industrierichtlinien
entworfen wurde.
e-Series Spritzgussmaschinen-
Installationsleitfaden 31
Schnittstelle (SGMS)12. Konformität
12. Konformität
Dieser Abschnitt enthält Informationen über Empfehlungen, Zertifikate und Erklärungen, die für
Universal Robots e-Series Roboter mit SGMS-Modulen gelten.
Dieses Dokument enthält das folgende Zertifikat:
• 12.5. TÜV NORD.
12.1. EUROMAP 67
Die im SGMS-Installationsleitfaden enthaltenen Informationen entsprechen EUROMAP 67
Version 1.11, eine kostenlose Empfehlung für Spritzgussmaschinen, die von www.euromap.org
heruntergeladen werden können.
Das SGMS-Modul von Universal Robots (Spritzgussmaschine) entspricht eingeschaltet allen
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
Anforderungen der Empfehlung EUROMAP 67. Im abgeschalteten Status des SGMS-Moduls gibt
die Empfehlung EUROMAP 67 vor, dass alle sicherheitsspezifischen Signale in Betrieb sein
müssen. Daher löst das SGMS-Modul das Not-Aus aus, das MAF-Signal und alle E/A-Signale,
wenn die Control-Box abgeschaltet ist.
Alle optionalen, herstellerspezifischen und reservierten E/A-Signale werden unterstützt, siehe
8. SGMSE/A in regulären Programmknoten auf Seite 25. Die optionalen E/A liegen außerhalb der
SGMS-Standardeinstellungen und können nur vom Hersteller definiert werden.
Die Schnittstelle wird mit denselben Komponenten, Prinzipien und Prüfanforderungen gebaut wie
die Control-Box. Die Schnittstelle EUROMAP 67 unterliegt der Einbauerklärung, die Sie im
Hardware-Installationshandbuch finden.
12.2. Versandmaterialien
Wie von unseren Anbietern angegeben, erfüllen die Versandmaterialien der Universal Robots e-
Series-Roboter die ISPM-15 Anforderungen an Holzverpackungsmaterial und sind entsprechend
gekennzeichnet.
12.3. Qualitätszertifikat
Universal Robots ist zertifiziert gemäß der Norm ISO 9001:2015 von Bureau Veritas.
Universal Robots e-Series-Roboter unterliegen kontinuierlichen, internen Prüfungen und End-of-
Line-Testverfahren. UR-Testverfahren werden stetigen Überprüfungen und Weiterentwicklungen
unterzogen.
e-Series Spritzgussmaschinen-
32 Installationsleitfaden
Schnittstelle (SGMS)12. Konformität
12.4. Sicherheitszertifikat
Das SGMS-Modul von Universal Robots (Spritzgussmaschine, Stopp-Funktion und E/A) ist
sicherheitsgeprüft vom TÜV NORD, einer benannten Stelle gemäß der Maschinenrichtlinie
2006/42/EG in der EU.
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
e-Series Spritzgussmaschinen-
Installationsleitfaden 33
Schnittstelle (SGMS)12. Konformität
12.5. TÜV NORD
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
e-Series Spritzgussmaschinen-
34 Installationsleitfaden
Schnittstelle (SGMS)12. Konformität
Copyright © 2019–2021 by Universal Robots A/S. Alle Rechte vorbehalten.
e-Series Spritzgussmaschinen-
Installationsleitfaden 35
Schnittstelle (SGMS)Softwareversion: 5.11 Dokumentversion:
Sie können auch lesen