Ethik und KI am Beispiel autonome Fahrzeuge Michael Mörike - Integrata-Stiftung für humane Nutzung der IT - Integrata Stiftung
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Ethik und KI
am Beispiel autonome Fahrzeuge
Michael Mörike
Integrata-Stiftung für humane Nutzung der IT
21. Juli 2020 @ Digihub Ulm
www.integrata-stiftung.de
Integrata-Stiftung für humane Nutzung der IT, Tübingen
Seit 1.1.2000 werben wir für:
IT möge
nicht nur zur Automatisierung oder Rationalisierung,
sondern vor allem zur Steigerung der Lebensqualität
der Menschen eingesetzt werden.
Wolfgang-Heilmann-Preis, Kongresse, Seminare, Vorträge
Wie kann KI
zur Steigerung der Lebensqualität eingesetzt werden?
Wie kann KI sich ethisch korrekt verhalten?
Wie können wir Ethik in Roboter einbauen?
EU-Kommission
HLEG AI: High Level Expert Group on AI
Ethische Richtlinien für vertrauenswürdige KI
Assessment List for trustworthy Artificial Intelligence
ec.europa.eu/digital-single-market/en/high-level-expert-group-artificial-intelligence
I. Überprüfbarkeit, Transparenz, Vertrauenswürdigkeit, …
II. Begründung in den Menschenrechten
III. Bedeutung für die Umsetzung, Entwicklung, Umgang mit KI
Regelt nicht,
wie sich eine autonome KI verhalten soll,
oder wie wir es hinbekommen,
dass sie sich moralisch richtig verhält.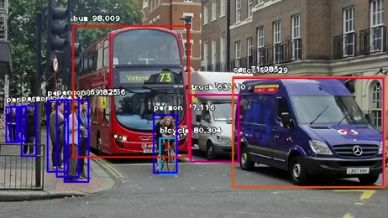
Moral für Roboter
Autonome Maschinen müssen lernen,
Situationen zu erkennen und darauf „richtig“ zu reagieren.
Zum Erkennen braucht es keine Moral – aber zum Agieren.
Moral wird nur zum Agieren benötigt,
und nur, wenn Menschen betroffen sind..
Beispiele:
1. Zur Diagnose von Brustkrebs auf Röntgenbildern braucht es keine Moral.
Die braucht der behandelnde Arzt.
2. Zum (vollautomatischen) Unkraut-Jäten braucht es keine Moral.
(auch wenn dabei Pflanzen / Unkraut getötet wird).
3. Zur (Vor-) Auswahl von Bewerbern, braucht es keine Ethik,
wenn ein Mensch („Personaler“) entscheidet.
Oder doch? Wegen Bias in der Vorauswahl?
4. Wenn der Personaler der KI die Entscheidung überlässt, auf jeden Fall!
5. Ein mit Menschen kooperierender Roboter braucht definitiv Moral!
Ethik einbauen?
Analogie: Ethik, Mathematik oder Medizin:
Sprachliche und faktische Reduktion in der Anwendung:
Ethik: Lehre des guten Handelns
Die Lehre kann nicht eingebaut werden,
Wohl aber deren Wirkung: Eingebaute Regeln wirken gemäß
den daran gestellten Erwartungen anerkannt „gut“
und ethisch-moralisch richtig.
Wir sagen: Ethik ist eingebaut
Mathematik: Lehre der Logik in abstrakten Strukturen
Die Lehre kann nicht in Software eingebaut werden,
Wohl aber deren Ergebnisse: Die eingebaute Software bringt
gemäß dem zugrunde liegenden Modell
logisch zuverlässige & richtige Ergebnisse.
Wir sagen: Mathematik ist eingebaut
Medizin: Lehre vom gesunden/kranken Körper und d. Heilung
Die Lehre kann nicht eingebaut werden
Wohl aber deren Ergebnisse: Die eingenommene Medizin bringt
gemäß den Forschungsergebnissen
zufriedenstellende Wirkung / Heilung.
Wir sagen: Wir nehmen Medizin ein
Autonome Maschinen Autonome Maschinen bewegen sich im gleichen Verkehrsraum wie Menschen. Z.B.: Autonome Fahrzeuge, humanoide Roboter im Hotel oder im Garten, Roboterhunde von Boston Dynamics, … Autonome Maschinen sind hoch automatisiert, übernehmen komplexe Aufgaben und agieren selbständig, d.h. sie übernehmen Aufgaben mit unvorhersehbaren Abläufen. Sie sind nicht autonom im dem Sinn wie Menschen es - juristisch - sind.

KI kommt schrittchenweise Fünf Stufen: 0. Alles muss man selber machen: beschleunigen, bremsen, lenken, Umfeld beachten 1. Assistiertes Fahren: Spurhalte-Assistent, Berganfahrhilfe, 2. Teilautomatisiert: Einparkhilfe, Stauassistent, … 3. Hochautomatisiert: Autopilot, Spurwechsel, Verfolgung, Geschwindigkeitsanpassung an Verkehrssituation 4. Vollautomatisiert: Auto macht alles, nur nicht ungelernte Situationen 5. Vollständig autonom, fahrerlos Nur Ziel und Startfreigabe werden extern vorgegeben Vorhersage: Level 5 wird sich in Unterlevel aufteilen: 5a) Perfekte Sicherheit 5b) Moralische Korrektheit 5c) Erlebnisfaktoren
Wie wirkt KI in Robotern? Sensoren: KI / SW: Aktoren: Kamera Mikrofon Bremse Abstandsradar intern Gas GPS Lenkrad Geschwindigkeit Ansage Querkräfte extern? Lichtschalter Helligkeit Blinker Belastung modular! Hupe Tankfüllstand Scheibenwischer Bedientablet Klimaanlage & viele mehr … NB: KI / SW : nicht alle Module enthalten KI, manche enthalten „nur“ klassische Software
KI im autonomen Auto
Bild aufnehmen, Sensoren auslesen
Objekte erkennen
Umgebung modellieren
Situation analysieren
Nächste Schritte planen
Aktionen ausführenRoboter-KI-Architektur
Modularer Ansatz
Wahr- Situations- Pfad- Fahrzeug-
Sensoren Analyse Planung Aktoren
nehmung Steuerung
1. Bilder von Umgebung aufnehmen, Sensoren auslesen HW
2. Objekte erkennen (was gibt es da?) NN
3. Ontologie zuordnen (semantisches Wissen zuordnen) --
4. Umgebung modellieren (Raummodell der Objekte erzeugen) (NN)
5. Eigenschaften aus Ontologie in Geometrie einbauen/einsetzen (NN)
6. Kurzfristige Vergangenheit berücksichtigen (Kurzzeitgedächtnis) --
7. Kurzfristige Zukunft vorhersagen (Vorhersage in 1/10 sec) --
8. Eigene Situation analysieren (aktuelle Lage bewusst machen) NN
9. Situation anderer analysieren („nachempfinden“?) NN
10. Ziele anpassen / einfügen: --
a. Nahziele aus Raum- & Zeit-Zielen einfügen (wann wohin?)
b. Ökonomische Ziele anpassen (wofür? was will ich?)
c. Moralische Ziele anpassen (erlaubt? soz. Mehrwert? Ethik)
11. Ziele gegeneinander bewerten (auf Basis aktueller Situation) NN
12. Mögliche nächste Schritte planen (kürzesten/besten Weg suchen) NN (!)
13. Situation unter Beachtung der Ziele neu bewerten NN
14. Nächsten Schritt auswählen (besten Weg) NN (!)
15. Aktionen ausführen (gemäß ausgewähltem Optimum) HWModularer Ansatz
Wahr- Situations- Pfad- Fahrzeug-
Sensoren Aktoren
nehmung Analyse Planung Steuerung
Wahrnehmung
Objekte
Objekte
erkennen
Sehr viele Pixeldaten
erkennen
Stereo-Erkennung
Pixel
Ontologie
zuordnen Wissensdatenbank
Einzel-
Umgebung
Objekte Daten der Einzelobjekte
modellieren incl. Eigenschaften
Vergangenheit
erinnern Umgebung Modell der Umgebung
mit aktuellem Zeitverlauf
In Zukunft
extrapolieren
SituationsanalyseModularer Ansatz
Wahr- Situations- Pfad- Fahrzeug-
Sensoren Aktoren
nehmung Analyse Planung Steuerung
Situationsanalyse & Pfadplanung
Situation Was kann ein Objekt?
bewerten
Pixel
Ziele ergänzen: Modell der Umgebung
räuml., zeitl. und Objekte
Einzel-
Objekte anreichern mit Ling. Var.
Objekte
relativieren
Umgebung Objekten Relevanz
Situation zuordnen unter
Wichtige Objekte
genau ansehen Ziele, Berücksichtigung der Ziele
Pfade, Stil (räumlich, zeitlich, ökonom.)
Ziele ergänzen:
Moral,
Stil, Moral
Regeln Was gehört sich?
FahrzeugsteuerungModularer Ansatz
Wahr- Situations- Pfad- Fahrzeug-
Sensoren
nehmung Analyse Planung Steuerung
Objekte Ziele auswerten
Objekte räuml., zeitl.
erkennen
erkennen Sensordaten Pfad planen
Pixel
Ontologie
zuordnen Einzel- Objekte
Objekte relativieren
Umgebung
modellieren Umgebungs-
Wichtige
Modell Objekte genau
ansehen
Vergangenheit
erinnern
Situation
Ziele ergänzen:
In Zukunft Fall, Stil, Moral,
extrapolieren Ziele, Stil Regeln
Pfad ergänzen
Situation Pfad
bewerten
Fahrzeugsteuerung
Moral,
Externe Vorgabe Regeln
AktorenRoboter-KI-Architektur
Das logische Modell wird für eine praktikable
Anwendung umgebaut und angepasst:
Pixel
1. Nicht für alle Objekte immer alles neu,
sondern ergänzen Einzel-
2. Schritt 12 wird mit Schritt 7 verschmolzen. Objekte
Etc…
3. Aus der Objekterkennung, Umgebung
der semantischen Zuordnung, etc.. Situation
wird einerseits permanent die Bewertung
der Umgebung (Situation) angepasst. Ziele, Fall,
4. Daraus werden andererseits permanent die Pfad, Stil
nächsten Schritte abgeleitet.
Moral,
5. Sie werden in spezielle Fälle eingeteilt. Regeln
6. Die jeweiligen Arbeiten laufen simultan
(parallel, asynchron) ab.Fallunterscheidungen
Drei Ebenen der Einbettung:
1. Anwendungsgebiet – schränkt die relevanten Werte ein:
a. Autonomes Fahren im öffentlichen Verkehr (keine Witze)
b. Autonomer Roboter in der Fabrik: (Höflichkeit egal)
c. Roboter im Haushalt oder im Garten: ( ??? )
d. Roboter im Weltraum: (gar keine Ethik)
2. Situation – verändert die Relationen der Werte:
a. Dichter Berufsverkehr: Zeit ist wichtig
b. Fahrt in den Urlaub: Zeit spielt keine Rolle
c. …
3. Fall – gestattet, die Werte zu operationalisieren:
a. Mensch möchte Straße überqueren
b. Auto sollte Fahrradfahrer überholen
c. Auto fährt durch Pfütze neben Passanten
d. ...Ethik in KI einbauen
Maschinen moralisches Agieren beibringen
heißt menschliche Werte als Ziele vorgeben.
Ethische Ziele lassen sich als menschliche Werte in Hierarchien
darstellen, die – je nach Situation –
wichtiger oder weniger wichtig sind.
(ähnlich wie Maslowsche Bedürfnispyramide)
KI muss ihre Aktionsoptionen an Werten messen
- und zwar situationsbedingt!
NB: Es gibt mehr als 100 verschiedene Werte:
(https://www.wertesysteme.de)
Wenn Werte klar geordnet sind, können sie
auch verrechnet werden, z.B. mit AHP.
D.h.: aus dem Netz der Werte, muss im
Einzelfall eine hierarchische Ordnung erzeugt werden.
Dabei hilft eine Ontologie.Rolle der Ontologie
1. Repräsentationssystem, stellt die Struktur der Wirklichkeit dar.
2. Datenbank, die die Beziehungen von Objekten enthalten.
3. Für die Verarbeitung (in einer Maschine) ist nur relevant,
was man mit den Objekten machen kann.
Werden den Objekten Eigenschaften aus einer Ontologie zugeordnet,
„weiß“ die Maschine (KI), was man mit den Objekten machen kann.
Mehr ist nicht nötig!
Die Menge aller Relationen eines Objektes zu anderen Objekten ist alles,
was eine Maschine „wissen“ muss, um zu erscheinen,
wie wenn sie vernünftig handeln würde.
Beispiel: Ein Baum bedeutet einem Förster oder Gärtner etwas anderes
als einem Schreiner oder einem Hund oder einer Amsel – oder einem Auto!
Jeder interessiert sich nur dafür, was man damit machen kann.
Menschliche Werte sind eng mit der menschlichen Ontologie verknüpft.
Schwierig genug!Ethik in KI einbauen
Offen:
1. Kann man die Moral in der KI in Maschinen kapseln?
Die KI müsste dann bei Handlungen gegen Menschen
immer vorher beim Moral-Modul über ein Interface anfragen.
(ähnlich dem ethischen Gewissen eines Menschen)
2. Welche Informationen brauchen die Interfaces?
Vermutlich sind das sehr viele: Wie strukturieren?
3. Kann man für Ethik / Moral ein Modell entwickeln?
Das man in die Kapsel einbauen kann?
4. Kann man die gekapselte Moral zertifizieren?
5. Wie gehen wir dann mit dem Weiter-Lernen um?
6. Welche Ethik?
Tugendethik, weil sie durch „Einüben“ entstehen kann? (Top-Down)
Allgemeine Ethik? Durch Sammlung von Fällen? (Bottom-Up)
7. Wenn es gelingt, Moral (gekapselt?) einzubauen,
ist eine eventuelle Unbedenklichkeitsbescheinigung
eng mit der Zuordnung der Verantwortung abzustimmen.
8. Gibt es für jeden Kulturkreis eine eigene Kapsel?Vielen Dank für
Ihre Aufmerksamkeit
Fragen?Sprachliche Unterscheidung Mensch Maschine Überlegen Analysieren Bewusstsein Situationsanalyse Empathie Situationsanalyse für andere Entscheiden Auswählen Handeln (Re-)Agieren Verantwortung - Ethik Moral (Bewertung menschlichen Handelns) (Maßstab richtigen Handelns) Deliberativ Vorgeformt
Modularisierung Eine modulare Architektur ist ein Fortschritt! ähnlich wie: Ø Einführung Objektorientierung anstelle großer Ablauf-Cluster Ø Einführung von Domain Driven Architecture Sie bringt Vorteile: 1. Es ist ein Modell, in dem man rechnen kann! 2. Teile können modular eingefügt werden 3. Verschiedene Entwickler können sich spezialisieren 4. Module von verschiedenen Herstellern kombinierbar. (Setzt Kompatibilität der Schnittstellen voraus) 5. Die Nachprüfbarkeit steigt, wenn ab Schritt 9 regelbasierte Systeme verwendet werden. 6. Insbesondere kann Ethik eingefügt werden (ab Schritt 9c) 7. Module evtl. einzeln prüf- und zertifizierbar
Modularisierung
Beispiel Bilderkennung in Schleifen / mehreren Modulen
Erster Durchlauf wie bisher üblich (Modul-1): z.B. Katze!
Zweiter Durchlauf: (Modul-2)
Umriss klar zu erkennen?
Ist die Bewegung typisch für Katzen? Video!
Dritter Durchlauf (ontologische Überprüfung, Modul-3)
• 2 Ohren
• 2 Augen
• ein Näschen
• Schnurrbarthaare
• 1 Schwanz
• 4 Pfoten
• Krallen an den Pfoten
• Flauschiges Fell, etc…
Nicht alles muss auf dem Bild sichtbar sein.
Einiges davon aber auf jeden Fall.
Zu vieles davon auf keinen Fall!Sie können auch lesen