FRIEDRICH-SCHILLER-UNIVERSITÄT JENA JENAER SCHRIFTEN MATHEMATIK UND INFORMATIK - ZUR
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
FRIEDRICH-SCHILLER- UNIVERSITÄT JENA JENAER SCHRIFTEN ZUR MATHEMATIK UND INFORMATIK Eingang: 07.11.2013 Math/Inf/06/2013 Als Manuskript gedruckt Clustered Swarm - Gemeinsam gegen den Stau Christian Stolcis
Clustered Swarm Gemeinsam gegen den Stau – Eine erste Einführung Christian Stolcis christian.stolcis@uni-jena.de Friedrich Schiller Universität Jena, Fakultät für Informatik “The best for the Group comes when everyone in the group does what's best for himself AND the group.” John Nash
Inhaltsverzeichnis 1. Abstract ........................................................................................................................................... 3 2. Einleitung ......................................................................................................................................... 4 3. Das lokale Optimum ........................................................................................................................ 6 4. Das globale Optimum finden ........................................................................................................... 8 5. Einsatzszenarien ............................................................................................................................ 12 5.1. Szenarien ............................................................................................................................... 12 5.1.1. Szenario Stadt ................................................................................................................ 12 5.1.2. Szenario Autobahn (Fernverkehrsverbindungen) ......................................................... 13 5.1.3. Szenario Bundesstraße, Landstraße (Überlandverbindungen) ..................................... 13 5.2. Lösungsstrategien.................................................................................................................. 14 6. IT-basierte Ziellösung .................................................................................................................... 16 6.1. Client-Server .......................................................................................................................... 17 6.2. Peer 2 Peer ............................................................................................................................ 19 6.3. Clustered Swarm ................................................................................................................... 20 7. Zusammenfassung & Ausblick ....................................................................................................... 23 8. Literaturverzeichnis ....................................................................................................................... 26 2

Abstract 1. Abstract Stau. Ein Phänomen welches eines der größten und zugleich interessantesten Probleme des 21. Jahrhunderts darstellt und dem Steuerzahler jährlich nicht nur Milliarden 1 Euro sondern auch Nerven und Zeit kostet. Lösungsideen und -Ansätze gibt es seit es den Stau selbst gibt, aber keine der Maßnahmen brachte bisher den durchschlagenden Erfolg. Aktuelle Entwicklungen und Fortschritte im Bereich der mobilen Datenkommunikation, welche in den nächsten Jahren Einzug in jedes moderne Fahrzeug halten werden [2], eröffnen ganz neue Perspektiven im Kampf gegen den Stau und den befürchteten Verkehrsinfarkt. Dieses Paper stellt ein Konzept vor, welches das Ziel einer globalen Optimierung zur verbesserten Routenführung aktueller Navigationssysteme verfolgt und dadurch eine potentielle Lösung für das Stauproblem darstellt. 1 Um genau zu sein 7,8 Milliarden Euro pro Jahr (Stand 10.12.2012) [1] 3
Einleitung 2. Einleitung Aktuelle Navigationssysteme der 2. Generation bieten eine Vielzahl von Funktionalitäten, welche weit über eine einfache Routenführung hinausgehen. So bieten viele Navigationssysteme Sicherheits- und Fahr-unterstützende Funktionen wie z.B. Kurvenwarner, Fahrspurassistent, Geschwindigkeitsassistent, Straßenschilderassistenten, text-to-speech uvm. und ermöglichen zur besseren Orientierung eine 3D- Darstellung der Karte von Städten und Landschaften (z.B. Navigon Services [3]). Neben der Routenführung, stellt seit jeher die Routenberechnung eine der Hauptfunktionalitäten eines Navigationssystems dar, auf Basis welcher eine Routenführung überhaupt erst ermöglicht wird. Auch in diesem Bereich bieten moderne Navigationssysteme bereits erweiterte Funktionalitäten. So beziehen viele Hersteller nicht mehr nur das Fahrzeugprofil in die Routenberechnung mit ein, sondern berücksichtigen auch persönliche Vorlieben der Fahrer (Bundestraßen, Autobahnen, schönste Strecke usw.) [4] sowie Uhrzeitprofile, welche die Staugefahr bzw. Verkehrsauslastung pro Streckenabschnitt, Datum und Uhrzeit anhand von Erfahrungswerten definieren [5]. Besonders die genannten Zeitprofile bieten bereits eine gute Möglichkeit, das erwartete Verkehrsaufkommen bei der Routenberechnung zu berücksichtigen und Fahrer um mögliche Staus zu leiten. Erweitert wird dies durch die Einbeziehung von Informationen über die aktuelle Verkehrslage, was eine Neuberechnung der Route ermöglicht, sollte dies auf Grund des Verkehrsaufkommens nötig bzw. von Vorteil sein. Dabei spielt besonders die Aktualität und Qualität der Meldungen eine große Rolle, da sich diese direkt auf die Güte der neu berechneten Route bzw. die Entscheidung für eine Neuberechnung auswirkt. Konnte die Aktualität und Qualität der Meldungen über das herkömmliche TMC (Traffic Message Channel) [6] bedingt durch die Aufnahme der Informationen über Polizei und Anrufermeldungen nicht immer gewährleistet werden, so wurde diese durch die Einführung von automatischen Datenerfassungssystemen wie z.B. FCD (Floating Car Data) [7] und die Nutzung von Sensoren im Straßennetz deutlich verbessert. Aber auch die Art und Weise wie die Verkehrsinformationen auf das Navigationsgerät gelangen spielt eine große Rolle für die Qualität. So wird TMC sowie das neuere TMCpro im nichthörbaren Bereich des UKW- Signals verbreitet, worüber nur eine geringe Bandbreite möglich ist (TMC: ca. 37 Bit/Sek, TMCpro: ca. 100 Bit/Sek) [8]. Dieser Nachteil wird bereits seit Jahren durch die Nutzung des Mobilfunknetzes über GPRS bzw. UMTS umgangen. So bieten fast alle großen Navigationsgeräte- Hersteller sog. Traffic-Live-Dienste an (z.B. TomTom HD Traffic, Navigon Traffic Live) welche nicht zuletzt durch die immer besser ausgebauten Handynetze und das dadurch immer und überall verfügbare Internet schnellere und häufigere Updates von Verkehrsinformationen ermöglichen. Moderne Navigationssysteme bieten also bereits eine dynamische Zielführung, welche die aktuelle Verkehrssituation in die Routenberechnung einbeziehen und bei Bedarf Ausweichrouten berechnen. Dabei werden jedoch weitere wichtige Aspekte des allgemeinen Straßenverkehrs außer Acht gelassen, wodurch Staus und stockender Verkehr entstehen und teilweise gefördert werden. Diese noch vorhandenen Defizite aktueller Herangehensweisen bei der Fahrzeugnavigation sowie allgemeinen Stauprävention werden im weiteren Verlauf des Papers aufgezeigt. Auf Basis der existierenden Defizite wird anschließend ein Konzept vorgestellt, welches eine globale Optimierung des Straßenverkehrs zum Ziel hat. Hierdurch soll den vorhandenen Defiziten bei der Staubekämpfung sowie Routenführung entgegengewirkt werden. Dabei werden zunächst die Kernidee sowie anhand von Szenarien, die für die Umsetzung der globalen Optimierung erforderlichen Strategien vorgestellt. 4
Einleitung Abschließend werden drei technische Umsetzungsmöglichkeiten aufgeführt, welche sowohl etablierte Architekturen technischer Systeme betrachten, als auch neuartige Algorithmen aus dem Bereich der Schwarmintelligenz berücksichtigen, um die globale Optimierung im vorgestellten Umfang auf den allgemeinen Straßenverkehr anwenden zu können. 5
Das lokale Optimum 3. Das lokale Optimum Dem Ansatz der dynamischen Zielführung durch Einbeziehen der aktuellen Verkehrssituation in die Routenberechnung liegt ohne Zweifel eine interessante Idee zu Grunde. Allerdings wird ein sehr wichtiger Aspekt außer Acht gelassen: Verkehr besteht aus vielen individuellen Teilnehmern. Bei der Routenberechnung werden allerdings nur persönliche und individuelle Ziele des jeweiligen Fahrers berücksichtigt, nämlich schnellstmöglich das jeweilige persönliche Ziel zu erreichen. Aktuelle Navigationssysteme führen bei der Routenberechnung also eine individuelle lokale Optimierung durch. Dabei wird zwar die aktuelle Verkehrslage berücksichtigt, mündet aber immer in ein individuelles, allein für den Einzelnutzer optimiertes Ergebnis. Diese Tatsache ist zum Teil auch Grund für viele Probleme im Straßenverkehr, da die persönlichen Ziele und das persönliche Wohl über dem anderer Verkehrsteilnehmer steht und die Gründe und Ursachen für das Verhalten anderer sowie deren Ziele nicht bekannt sind bzw. nicht interessieren. Treffen zu viele lokale Optima aufeinander, bzw. besitzen diese eine ähnliche Ausprägung, so kann dies insbesondere in Kombination mit den allgemeinen Verkehrsbeeinflussungsmaßnahmen unter Umständen negative Auswirkungen auf den Gesamtverkehr haben. Nehmen zu viele Autofahrer die gleiche Umleitung, weil sie diese von ihren „Navis“ vorgeschlagen bekommen oder ist diese Umleitung auf Grund der allgemeinen Verkehrsbeeinflussungsmaßnahme als „die Umleitung“ für den Stau auf der Autobahn auserwählt, so entsteht genau dort sehr schnell ein neuer Stau. Viele lokale Optima können also unter Umständen einem gemeinsamen globalen Optimum entgegenwirken. Somit stehen sich zwei unterschiedliche Herangehensweisen gegenüber, welche in ihrer aktuellen Form keine Schnittstellen bieten um im Sinne eines globalen Optimums zusammenarbeiten zu können. Tatsächlich scheint der Schlüssel für einen stabilen und kontinuierlichen Verkehrsfluss zunehmend in der Zusammenarbeit der vielen Verkehrsteilnehmer zu liegen. Wie in vielen anderen Bereichen unseres Lebens und unserer Gesellschaft, wird auch im Straßenverkehr aufgrund der stetig zunehmenden Anzahl von Verkehrsteilnehmern 2 ein „Miteinander“ wichtiger, um langfristig eine Lösung für aktuelle Probleme im Straßenverkehr liefern zu können. Ähnlich einem Ameisenvolk, welches das gemeinsame Ziel der Nahrungssuche zum Wohle des gesamten Volkes hat, könnte die strukturierte Zusammenarbeit der am Verkehrsgeschehen teilnehmenden Fahrzeuge zu einer Verbesserung des allgemeinen Straßenverkehrs und somit der individuellen Ziele führen. So kann nach John Nash und dem von ihm begründeten Nash-Gleichgewicht das beste Ergebnis für eine Gruppe nur erzielt werden wenn jeder Einzelne das tut was für ihn selbst und für die Gruppe das Beste ist [10]. Laut Definition besagt dieser aus der Spieletheorie stammende Begriff: „Ein Nash-Gleichgewicht liegt dann vor, wenn in einem nicht-kooperativen Spiel ein Zustand eines strategischen Gleichgewichts herrscht, von dem ausgehend kein einzelner Spieler für sich einen Vorteil erzielen kann wenn er allein seine Strategie verändert.“ Demnach kann eine Verbesserung des Spielergebnisses für den Einzelnen nur dann erzielt werden, wenn jeder der Teilnehmer seine Strategie verändert. Angewandt auf den Straßenverkehr ist dies allerdings nur durch die Kooperation der verschiedenen Teilnehmer möglich. Dabei kann eine für den Einzelnen getroffene Entscheidung, subjektiv vielleicht nicht optimal erscheinen, ist dies für die Allgemeinheit aber sehr wohl und dadurch im Schnitt wiederum für jeden Einzelnen. 2 Bis zum Jahr 2020 +20% im Personenverkehr [9] 6
Das lokale Optimum Im Sinne des allgemeinen Straßenverkehrs oder besser gesagt im Sinne aller Verkehrsteilnehmer, wäre daher eine Routenberechnung, welche sowohl die individuellen Ziele aller Verkehrsteilnehmer, als auch die Ziele des allgemeinen Straßenverkehrs berücksichtigt, deutlich effektiver. Mit Hilfe solcher Routingalgorithmen könnten die Routenführung, Routenberechnung und Verkehrsflusssteuerung miteinander gekoppelt und somit Navigationsgeräte der 3. Generation ermöglicht werden, welche im Sinne jedes einzelnen Teilnehmers, aber unter Berücksichtigung aller Verkehrsteilnehmer handeln können. Neben der alleinigen Stauumfahrung bzw. Umleitung von Fahrzeugen könnten so neue Möglichkeiten der Stauprävention entstehen und die Reisezeiten jedes einzelnen sowie der Kraftstoffverbrauch insgesamt deutlich reduziert werden. 7
Das globale Optimum finden 4. Das globale Optimum finden Gegenwärtig konzentrieren sich Herangehensweisen im Kampf gegen Verkehrsbehinderungen hauptsächlich auf den Ausbau der Verkehrsinfrastruktur sowie Verkehrsleitsystemen auf Autobahnen und stark befahrenen Hauptverbindungsstrecken [11]. So plant die Bundesregierung bis 2015 dem Problem Stau durch verschiedene technische Systeme mit einem Gesamtvolumen von 300 Mio. Euro entgegenzuwirken. Mit Hilfe solcher geplanter Streckenbeeinflussungsanlagen soll der Verkehr zumindest innerhalb eines geographisch begrenzten Autobahnabschnitts beeinflusst und bei Bedarf kontrolliert umgeleitet werden. Allerdings ist das Straßennetz vieler Länder bereits heute sehr gut ausgebaut. Deutschland liegt mit seinen ca. 231.500 km Straßen weltweit zwar weit abgeschlagen, noch hinter Polen, Indonesien, Mexiko und Pakistan, besitzt aber eines der qualitativ besten Straßennetze weltweit [12]. Das Problem liegt also nicht in einer schlechten Infrastruktur. Ganz im Gegenteil. Die Qualität und Anzahl vorhandener Verkehrswege fördert sogar die Entstehung von Staus. So besagt das „fundamental law of highway congestion“ welches vor 40 Jahren von dem amerikanischen Ökonom Anthony Downs formuliert wurde: Mehr Straßen erzeugen mehr Verkehr [13]. 2011 wurde tatsächlich ein Zusammenhang zwischen der Anzahl von Straßenkilometern und der Anzahl von Verkehrsteilnehmern in einer Studie der Universität Toronto und der London School of Economics nachgewiesen. Dabei konnte eine fast 1 zu 1 Zunahme des Verkehrs in Abhängigkeit der Anzahl neuer Straßenkilometer belegt werden [14]. Der Straßenverkehr wird somit durch gut ausgebaute Straßen auf diese wenigen Strecken gelenkt und kanalisiert, wohingegen Nebenstrecken und weniger gut ausgebaute Strecken ungenutzt bleiben. Der starke Ausbau von Hauptverbindungsstrecken führt also zu einer ungleichen Verteilung bzw. Nutzung vorhandener Verkehrswege was häufig Ursache von Überlastungen auf stark genutzten Verbindungen ist. So ist das Hauptproblem bzw. die Hauptursache für Stau in den allermeisten Fällen ein Sättigungsproblem, bei dem die Nachfrage über das Angebot der Ressource Straße hinausgeht. 50% aller Staus entstehen durch die Überlastung des Straßennetzes [15]. Sowohl die Straßen selbst, als auch der auf ihnen zur Verfügung stehende Raum sind begrenzt. Dies bedeutet im Umkehrschluss, dass eine Straße nur eine begrenzte Anzahl von Fahrzeugen innerhalb eines Abschnitts und Zeiteinheit „bewältigen“ kann. So liegt die Kapazität von gut ausgebauten Straßen bei 1500 bis 2500 Fahrzeugen pro Stunde und Spur. Dabei kann ein optimaler Verkehrsfluss aber nur erreicht werden, wenn sich alle Fahrzeuge mit einer gleichmäßigen Geschwindigkeit von 80-100 km/h bewegen. Schnelleres und langsameres Fahren verringert die Kapazität [16]. Steigt nun die Nachfrage nach diesem Raum über das Angebot hinaus so entsteht ein Sättigungsproblem, also eine Überlastung der Straße. Die „Tragik der Allmende“ oder auch „Tragödie des Allgemeinguts“, welches ein aus der Sozialwissenschaft stammendes, evolutionstheoretisches Modell ist, beschreibt eben dieses Sättigungsproblem. Dem Modell nach führt die nicht effiziente Nutzung frei verfügbarer, aber nur begrenzt zur Verfügung stehender Ressourcen zu einer Übernutzung dieser, was auch die Nutzer selbst bedroht [17]. Aber welche Optionen zur Lösung des Sättigungsproblems bleiben, wenn im Falle des Straßenverkehrs eine Erhöhung und Verbesserung der Ressource Straße nicht erfolgsversprechend und die Reduktion der Nutzer schwer umsetzbar ist? Die effizientere Nutzung vorhandener Verkehrswege! Das zu verfolgende Ziel sollte also eine möglichst gute Verteilung aller Verkehrsteilnehmer auf das vorhandene Straßennetz sein, sodass die verfügbaren Straßen hinsichtlich der 8
Das globale Optimum finden Durchflussgeschwindigkeit und Kapazität bestmöglich ausgelastet sind. Diese balancierte Verteilung der Verkehrsteilnehmer auf das vorhandene Straßennetz stellt das übergeordnete Ziel des allgemeinen Straßenverkehrs dar und entspricht somit dem globalen Optimum welches es zu verfolgen gilt. Mit aktuell zur Verfügung stehenden Mitteln und Vorgehensweisen zur Verkehrsbeeinflussung ist eine solche Strategie aber kaum umsetzbar, da diese nur begrenzt auf die vielen Verkehrsteilnehmer als einheitliche Instanz Einfluss nehmen können. Anwendbar ist eine solche ganzheitliche Strategie nur, wenn die Ziele der Verkehrsteilnehmer bekannt sind und diese sich entsprechend dem errechneten globalen Optimum individuell leiten lassen. Einen Ansatzpunkt für ein solches „Miteinander“ im Straßenverkehr bieten Navigationssysteme, ob mobil für die Frontscheibe auf dem Smartphone oder fest im Fahrzeug verbaut. Berücksichtigt man, anders als bisher, bei der individuellen Routenberechnung eines Verkehrsteilnehmers nicht nur seine eigenen persönlichen Ziele sondern auch die Ziele der anderen Verkehrsteilnehmer („was tun alle anderen“), die aktuelle Verkehrssituation sowie Ziele des allgemeinen Straßenverkehrs, so können die daraus resultierenden individuellen Routen im Sinne aller ausgeprägt sein. Die Verknüpfung von individuellen mit allgemeinen Zielen könnte folglich sowohl eine qualitative Verbesserung der individuellen Routen der einzelnen Verkehrsteilnehmer, als auch das Anwenden allgemeiner Verkehrsbeeinflussungsmaßnahmen ermöglichen. Aus der aktuell verfolgten lokalen Optimierungsstrategie gilt es somit eine globale Optimierung zu etablieren, welche als übergeordnetes Ziel die Verteilung der Verkehrsteilnehmer auf alle zur Verfügung stehenden Straßen unter Berücksichtigung folgender Bedingung hat: (1) ∀ ∈ : ( ) ≤ ( ) Für alle Straßen aus der Menge der zur Verfügung stehenden Straßen muss gelten, dass die aktuelle Verkehrsdichte der Straße ( ) kleiner gleich der optimalen Verkehrsdichte ( ) der Straße ist. Dabei entspricht ( ) derjenigen maximalen Verkehrsdichte, die unter Berücksichtigung der Geschwindigkeiten auf der Straße den bestmöglichen Verkehrsfluss und somit den größtmögliche Fahrzeugdurchsatz pro Zeiteinheit ermöglicht. Erreichen alle Straßen diesen Wert so muss die Verteilung der Fahrzeuge durch folgende Bedingung erweitert werden: (2) ∀ ∈ : ( ) < ( ) Für alle Straßen aus der Menge der zur Verfügung stehenden Straßen muss gelten, dass die aktuelle Verkehrsdichte der Straße ( ) kleiner der maximalen Verkehrsdichte ( ) der Straße ist. Dabei entspricht ( ) der maximalen Verkehrsdichte, die noch einen stabilen Verkehrsfluss auf der Straße garantiert. Erreichen alle zur Verfügung stehenden Straßen selbst diesen maximalen Wert so entspricht dies der Sättigung des Gesamtnetzes wodurch ein stabiler Verkehr allein durch die Verteilung der Fahrzeuge auf das Straßennetz nicht mehr gewährleistet werden kann. Unter der Annahme, dass die Kapazität bzw. Verkehrsdichte ( ) die Qualität der Straße berücksichtigt (höheres ( ) entspricht einer besser ausgebauten Straße), könnten bei der Verteilung der Fahrzeuge, Straßen mit größerem ( ) bevorzugt werden bis obige Bedingung (1) nicht mehr erfüllt ist. Dies allein reicht aber nicht aus um auch im Sinne der Verkehrsteilnehmer möglichst akzeptable Routen zu liefern. Hierfür sind noch weitere Informationen erforderlich welche in Kapitel 6 aufgezeigt werden. 9
Das globale Optimum finden Das Ergebnis der Zielfunktion sind viele individuelle Routen für die verschiedenen Verkehrsteilnehmer, welche sowohl im Sinne einer bestmöglichen Verteilung der Verkehrsteilnehmer, als auch im Sinne des Verkehrsteilnehmers und dessen Ziele ausgeprägt sind. Dabei ist die konkrete Ausprägung der Zielfunktion abhängig von der gewählten Optimierungsgröße der verschiedenen Verkehrsteilnehmer wie z.B. Zeit, Distanz oder Verbrauch. Beim Verfolgen des globalen Optimums dürfen sich die errechneten Routen allerdings nicht zu stark von den Routen ohne globale Optimierung entfernen. Anders gesagt: Die persönlichen Routen dürfen sich durch die globale Optimierung nicht zu sehr verschlechtern. Die Zielfunktion muss somit ein weiteres Kriterium erfüllen um dieser Tatsache gerecht zu werden, unabhängig von der gewählten Optimierungsgröße: (3) ∑ ∈ � ( ) − ( ) � → 0 Es sei ( ) die durch die lokale Optimierung bezogen auf eine bestimmte Größe berechnete Route eines Fahrzeugs welche im weiteren Verlauf als individuelles lokales Optimum bezeichnet wird. Weiterhin bezeichnet ( ) die durch die globale Optimierung bezogen auf dieselbe Größe erhaltene Route des Fahrzeugs welche im weiteren Verlauf als individuelles globales Optimum bezeichnet wird. Unter der Voraussetzung dass ( ) die bestmögliche individuelle Route darstellt, welche unter Verwendung aktueller Algorithmen zur Routenberechnung ermittelt wird, so gilt es die Summe der Differenzen zwischen den individuellen globalen Optima und den individuellen lokalen Optima der Fahrzeuge zu minimieren. Dabei soll die Summe aller Differenzen möglichst gegen 0 tendieren um sich dem globalen Optimum bestmöglich nähern zu können. Dies bedeutet aber auch, dass einige individuelle globale Optima deutlich schlechter und einige deutlich besser ausgeprägt sein könnten und die Summe trotzdem gegen 0 tendieren würde. Tatsächlich ist dies korrekt und sogar erwünscht. Je nach persönlichem Profil des Fahrers kann somit die allgemeine Verkehrsbelastung mehr oder weniger in das individuelle globale Optimum einfließen um insgesamt einen flüssigen Verkehr aufrechtzuerhalten. Eine Familie die in den Urlaub fährt nimmt eine Verspätung von 15 Minuten eher in Kauf als ein Pendler der pünktlich auf Arbeit sein muss. So kann die Last auf den „Urlaubsfahrer“ gelegt werden damit der „Pendler“ pünktlich ankommt. Dies bedeutet aber nicht, dass einige auf Kosten anderer eine Verbesserung erfahren. Vielmehr soll eine kleine Verschlechterung des tatsächlichen Optimums für einen stabilen Verkehrsfluss sorgen, was sich wiederum auf jeden einzelnen Verkehrsteilnehmer positiv auswirkt. Nach John Nash (Siehe Kap. 3) könnte dies im Falle des Urlaubfahrers bedeuten, dass sich die Verspätung auf der 1200 km Strecke bis ans Urlaubsziel von 40 Minuten auf 15 reduziert. Was auf den ersten Blick wie eine Verschlechterung aussieht, kann im Kontext eines ganzheitlich verfolgten Optimums einer tatsächlichen Verbesserung entsprechen. 10
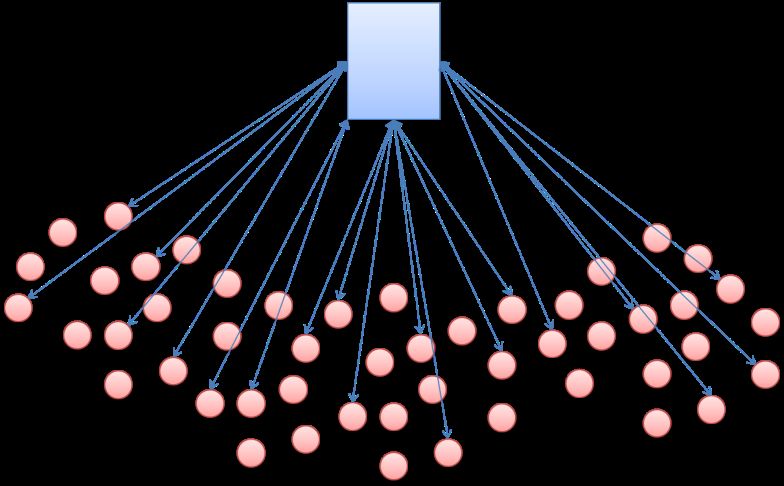
Das globale Optimum finden Abbildung 1a: Ist- Zustand Abbildung 1b: Soll- Zustand Navigationssysteme der nächsten Generation, welche ein „Miteinander“ im Straßenverkehr im Sinne einer bestmöglichen Auslastung des Straßennetzes verfolgen, könnten neben einer Verbesserung der individuellen Routen bzw. Fahrzeiten zudem eine Stabilisierung des allgemeinen Straßenverkehrs sowie eine Verringerung von Stau und Verkehrsbehinderungen mit sich bringen. Anders gesagt könnte die Verbesserung der individuellen Routen durch Betrachtung sämtlicher individueller wie allgemeiner Ziele eine Verbesserung des Straßenverkehrs mit sich bringen und umgekehrt. 11
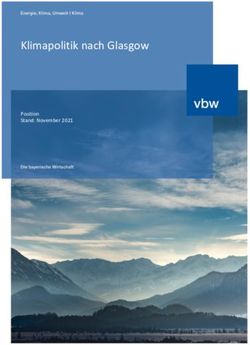
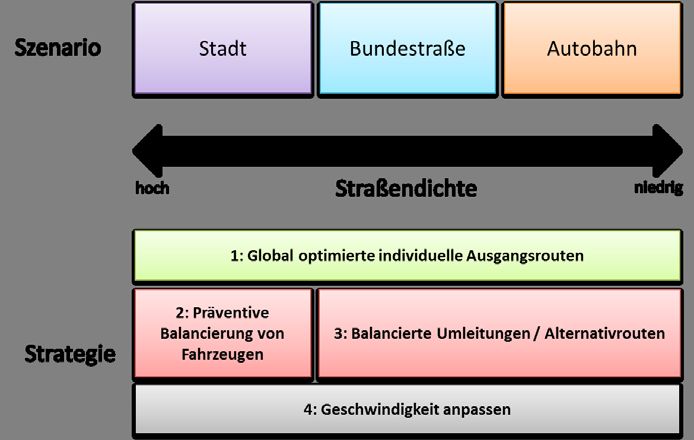
Einsatzszenarien 5. Einsatzszenarien Die alleinige Verteilung bzw. Balancierung der Verkehrsteilnehmer auf alle zur Verfügung stehenden Straßen ist hinsichtlich der unterschiedlichen Straßentypen nicht immer in gleichem Umfang sinnvoll. So macht in geschlossenen Ortschaften eine präventive Verteilung der Verkehrsteilnehmer durchaus Sinn, auf Autobahnen bringt dies in der Regel aber keine Vorteile. Entscheidend für die zu wählende Vorgehensweise ist somit der Straßentyp bzw. die Straßenqualität sowie die räumliche Beschaffenheit der Straßen, oder anders gesagt deren Dichte innerhalb eines bestimmten räumlichen Bereiches. Aber auch externe Faktoren wie Unfälle, Wetter usw. nehmen Einfluss auf die zu wählende Vorgehensweise. Diesen Umstand beachtend konnten drei Szenarien definiert werden, welche die unterschiedlichen Straßenbedingungen darstellen sollen. Daraus konnten wiederum 4 Lösungsstrategien ermittelt werden, welche auf Basis der Ursachen für Verkehrsbehinderungen der jeweiligen Szenarien eine mögliche Lösung darstellen. 5.1. Szenarien 5.1.1. Szenario Stadt Städte und Metropolregionen besitzen in der Regel ein sehr dichtes Straßennetz, welches aus einigen wenigen gut ausgebauten Hauptverbindungsstrecken und vielen meist kleineren Nebenstraßen besteht. Da die meisten Verkehrsteilnehmer die gut ausgebauten Hauptverbindungsstrecken nutzen, sind diese häufig einer Übernutzung ausgesetzt. Dies führt insbesondere zu Stoßzeiten sehr schnell zu Verkehrsbehinderungen und Staus, obwohl genügend Ressourcen in Form von Straßen zur Verfügung stehen die nicht genutzt werden. Aber auch Ampeln stellen eine deutliche Beeinträchtigung des Verkehrsflusses dar, welche durch die Nutzung von Nebenstraßen umgangen werden können, da diese selten durch Ampeln geregelt werden. Durch die hohe Straßendichte bieten Städte und Ballungszentren also ideale Voraussetzungen für alternative Routen auch auf kurzen Strecken und somit für eine Verteilung der Verkehrsteilnehmer auf möglichst viele Straßen. Um auf das hohe Verkehrsaufkommen im innerstädtischen Bereich angemessen zu reagieren, kommt die Verteilung des Verkehrs einer präventiven Balancierung aller Verkehrsteilnehmer gleich, also einer Verteilung noch bevor es zu Verkehrsbehinderungen kommt. Je nach Verkehrsaufkommen können hierdurch Hauptverkehrswege entlastet werden um einen stetigen Verkehrsfluss aufrecht zu erhalten. Durch diese Vorgehensweise können Flaschenhälse frühzeitig erkannt und den Verkehrsteilnehmern alternative Wege angeboten werden. 12
Einsatzszenarien 5.1.2. Szenario Autobahn (Fernverkehrsverbindungen) Autobahnen stellen insbesondere für den Fern- und Güterverkehr Hauptverbindungsstrecken dar und bieten schnelle Reisezeiten. Durch ihre charakteristischen Eigenschaften wie Mehrspurigkeit und hohe Reisegeschwindigkeiten stellen Autobahnen bis zu einem bestimmten Grad die bestmögliche Straßenwahl dar, selbst wenn alternative Strecken bezüglich ihrer Länge um einiges kürzer wären. Eine ständige Balancierung der Verkehrsteilnehmer auf die zur Verfügung stehenden Straßen würde im Fernverkehr somit keinen großen Vorteil bringen so lange ein flüssiger Verkehr gewährleistet werden kann. Erst wenn die Staugefahr durch zu viele Verkehrsteilnehmer steigt, oder die Autobahn aufgrund eines Unfalls komplett gesperrt wird, ist eine weiträumige Verteilung der Verkehrsteilnehmer auf Umleitungsstrecken notwendig und sinnvoll. Erschwert wird diese Vorgehensweise allerdings von der Tatsache, dass es nur wenige Möglichkeiten gibt, von der Autobahn abzufahren bzw. auf diese wieder aufzufahren. So liegen zwischen Autobahn Ab- und Auffahrten häufig einige Kilometer, was eine schnelle Reaktion auf das Verkehrsgeschehen nur schwer zulässt. Aber auch die Kapazität von alternativen Straßen ist im Vergleich zu Autobahnen deutlich geringer, wodurch es sehr schnell zu Überlastungen auf Umleitungen kommen kann. Diese Eigenschaften müssen bei der Balancierung der Verkehrsteilnehmer auf Umleitungsstrecken berücksichtig werden. So muss eine balancierte Umleitung bereits viele Kilometer vor der Verkehrsbehinderung beginnen und die Verkehrsteilnehmer großräumig verteilen. Dabei sollte der Fokus darauf liegen, die Fahrzeuge so schnell wie möglich wieder auf die Autobahn zurückzuführen und einige vielleicht sogar in den Stau zu leiten um auf Umleitungsstrecken und Alternativrouten mit einer deutlich geringeren Kapazität einen flüssigen Verkehr aufrechterhalten zu können. 5.1.3. Szenario Bundesstraße, Landstraße (Überlandverbindungen) Überlandverbindungen können in Bezug auf ihre Eigenschaften zwischen dem Szenario Stadt und dem Szenario Autobahn eingeordnet werden. Im Überlandbereich existieren zwar deutlich weniger Verbindungen als im innerstädtischen Bereich aber im Vergleich zu Autobahnen ist das Überlandnetz erheblich verzweigter. Auch die Auslegung für eine Vielzahl an Fahrzeugen und hohe Reisegeschwindigkeiten übersteigt jene der innerstädtischen Straßen, erreicht aber nicht die Charakteristika von Autobahnen. Diese Eigenschaften führen meist, noch mehr als im innerstädtischen Bereich, zur vermehrten Nutzung der besser ausgebauten Hauptverbindungsstrecken wie z.B. Bundesstraßen und Landstraßen. Somit werden auch im Überlandbereich häufig Hauptverbindungen überbenutzt obwohl weitere Nebenverbindungen ungenutzt bleiben. Durch die deutlich geringere Menge zur Verfügung stehender Straßen im Überlandbereich im Vergleich zum innerstädtischen Bereich ist ein ständiges und präventives Verteilen der Verkehrsteilnehmer nicht immer sinnvoll, da selbst bei geringen Verkehrsbehinderungen das Verbleiben auf der Hauptverbindung schneller zum Ziel führt bzw. Alternativen häufig einen zu großen Umweg darstellen. Vielmehr sollte bereits bei der Routenberechnung eine sinnvolle Balancierung der Verkehrsteilnehmer durchgeführt werden, bzw. erst im Falle einer gravierenden Verkehrsbehinderung eine frühzeitige und balancierte Umleitung aller nachfolgenden Fahrzeuge durchgeführt werden. Anders als im Szenario Autobahn muss der Fokus aber nicht zwingend auf das schnelle Zurückführen aller Fahrzeuge auf die Ausgangsstrecke 13
Einsatzszenarien liegen, da genügend alternative Straßenverläufe zur Verfügung stehen die ähnliche Kapazitäten bieten und unter Berücksichtigung der Einschränkungen auf der Ausgangsstrecke sogar die bessere Wahl darstellen können. Je nach Straßenkategorie und Beschaffenheit des Straßennetzes innerhalb eines räumlichen Bereiches besitzt die anzuwendende Vorgehensweise beim Verfolgen der globalen Optimierung in Form der Verteilung von Fahrzeugen also unterschiedliche Ausprägung. Dies ist notwendig, um den jeweiligen Charakteristika der Szenarien gerecht zu werden. 5.2. Lösungsstrategien Auf Grundlage der vorgestellten Szenarien konnten 4 Strategien identifiziert werden, welche je nach Szenario geeignete Herangehensweisen für die angestrebte globale Optimierung darstellen. Ausgehend von dem zu verfolgenden Ziel einer möglichst guten Verteilung der Verkehrsteilnehmer, besitzen diese Strategien Eigenschaften welche die Besonderheiten der dargestellten Szenarien aus 5.1 berücksichtigen. Dabei bedingen sich die Strategien teilweise indirekt und schließen sich je nach Anwendungsbereich gegenseitig ein. Die tatsächliche Ausprägung der eingesetzten Herangehensweise ist dabei hauptsächlich von der Dichte und Beschaffenheit des Straßennetzes innerhalb eines bestimmten räumlichen Bereichs sowie vom Verkehrsaufkommen selbst abhängig. Diese Strategien sind: 1. Global optimierte individuelle Ausgangsrouten: Zu Beginn jeder Reise bzw. Autofahrt soll jeder Verkehrsteilnehmer eine individuelle global optimierte Route bekommen, welche sowohl die aktuelle Verkehrssituation und Straßenauslastung als auch die persönlichen Ziele der Verkehrsteilnehmer berücksichtigt. Diese entspricht somit dem individuellen globalen Optimum ( ) aus Bedingung (3). 2. Präventive Balancierung von Fahrzeugen: Besonders in Bereichen einer hohen Straßendichte wie innerhalb von Ballungszentren soll eine ständige balancierte Fahrzeugverteilung zu einer besseren Auslastung der vorhandenen Straßen führen, wodurch Staus und Verkehrsbehinderungen bereits im Voraus vermieden werden könnten. Dabei muss insbesondere Bedingung (1) und bei Bedarf Bedingung (2) für die Berechnung berücksichtig werden um eine möglichst gleichmäßige Verteilung gewährleisten zu können. 3. Balancierte Umleitungen / Alternativrouten: Sinkt der Durchsatz einer Straße unter eine kritische Grenze oder wird ein bestimmter Straßenabschnitt zeitweise komplett gesperrt so sollten bestenfalls alle nachfolgenden Fahrzeuge auf alternative Routen bzw. Umleitungen verteilt werden. Dabei soll die Verteilung der Fahrzeuge unter Berücksichtigung der globalen Optimierung durchgeführt werden um weitere Staus auf Ausweichstrecken zu vermeiden. Je nach Straßenkategorie bzw. Szenario liegt der Fokus der Strategie auf schnellem Zurückführen der Verkehrsteilnehmer auf die Hauptstrecke (Szenario Autobahn) oder auf einer großräumigen Verteilung (Szenario Stadt). Abhängig vom Szenario wird diese Strategie indirekt bereits durch die allgemeine präventive Balancierung angewandt (Szenario Stadt) oder kommt erst bei einer tatsächlichen Einschränkung der Befahrbarkeit zur Anwendung. Letzteres betrifft insbesondere Bereiche mit geringer Straßendichte, sowie Missverhältnisse zwischen Qualität der Hauptverbindungsstrecken und alternativer Strecken, wie es bei 14
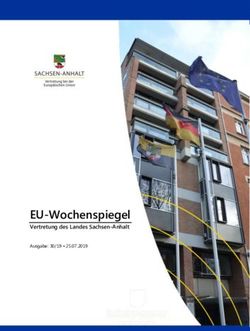
Einsatzszenarien Überland- und Fernverbindungen der Fall ist. Auch für diese Strategie ist die Einhaltung von Bedingung (1) und (2) von zentraler Bedeutung, da eine gleichmäßige Verteilung der Fahrzeuge nur hierdurch gewährleistet werden kann. 4. Geschwindigkeit anpassen: Eine von Verkehrsleitsystemen bereits eingesetzte Methode ist die großflächige Geschwindigkeitsanpassung im Falle von Verkehrsbehinderungen sowie großem Verkehrsaufkommen [18]. Dadurch kann der gesamte Verkehrsfluss stabilisiert werden um einen höheren Durchsatz zu erreichen und somit die Ressource „Straße“ besser auszunutzen. Zusätzlich bietet die Geschwindigkeitsanpassung die Möglichkeit den Zufluss zu einer Verkehrsbehinderung, bei gleichbleibender Abflussgeschwindigkeit, zu reduzieren. Hierdurch können Verkehrsbehinderungen aufgelöst werden ohne alternative Routen nutzen zu müssen. Ist das Verkehrsaufkommen allerdings zu hoch sollte diese Vorgehensweise mit Strategie 2 oder 3 gekoppelt werden. So könnten einige Fahrzeuge auf der Autobahn verbleiben sowie weitere über Umleitungsstrecken geleitet werden, ohne die Autobahn aus der weiteren Balancierung auszuschließen. Erst eine Totalsperrung der Autobahn würde dieses Vorgehen nutzlos machen. Abbildung 2: Einsatzbereiche der Strategien 15
IT-basierte Ziellösung 6. IT-basierte Ziellösung Die Umsetzung eines solchen ganzheitlichen Navigationssystems, welches globale und individuelle Ziele im Sinne einer kooperativen Optimierungsstrategie miteinander verknüpft, stellt hohe Ansprüche sowohl an die technische als auch an die praktische Umsetzbarkeit. Schon allein auf Grund der vielen zeitkritischen Routenberechnungen und der Übertragung dieser an die entsprechenden Verkehrsteilnehmer, muss das System sehr hohen Anforderungen gerecht werden. Um diesen Anforderungen entsprechen zu können, muss ein solches System folgende Eigenschaften aufweisen: • Dynamisch: Da sich die Verkehrsbedingungen unabhängig von dessen Steuerung trotzdem schnell ändern, sowie neue Verkehrsteilnehmer hinzukommen und wegfallen können, muss das System dynamisch auf Veränderungen reagieren können. • Skalierbar: Da die Anzahl der Verkehrsteilnehmer selbst, vor allem aber jener welche das System nutzen, stark schwanken kann, muss das System sowohl bei wenigen, als auch bei sehr vielen Nutzern noch angemessen reagieren und funktionieren sowie hinreichend schnell qualitativ konstante Routen liefern. • Robust: Da das System Dienste in einem hochdynamischen und zeitkritischen Kontext bereitstellt ist eine angemessene Reaktion auf evtl. auftretende Fehler notwendig um die Gesamtstabilität nicht zu gefährden. So sollte das System entsprechend der graceful degradation [19] auf Fehler und unerwartet eintretende Ereignisse sicher reagieren, indem die Funktionalität schrittweise durch Verminderung der Qualität oder/und Verringerung des Funktionsumfangs reduziert wird. So wird bereits durch das Anpassen der Bedingung (1) mittels Bedingung (2) bei zu hohem Verkehrsaufkommen eine schrittweise Reduktion der Qualität der Fahrzeugverteilung durchgeführt. Insgesamt müssen folgende System- Eigenheiten berücksichtig werden welche gleichzeitig Anforderungen an das System darstellen: - Infrastrukturunabhängig: Da im Vordergrund des Systems der Informationsaustausch bzw. die Kommunikation steht muss das System je nach technischer Umsetzung auch im Falle einer teilweise oder gänzlich ausgefallenen Infrastruktur möglichst lange stabil funktionieren. - Fehlertolerant: Wenn Nutzer den Routenanweisungen durch ihre individuelle Route nicht Folge leisten so darf das globale Optimum sowie die dadurch berechneten individuellen globalen Optima nicht zu stark beeinträchtigt werden bzw. sich im besten Fall nur minimal verschlechtern. - Stabil: Da nur ein bestimmter Prozentsatz aller Verkehrsteilnehmer das System nutzen wird, muss das System auch dann noch annehmbare Ergebnisse in Form von individuellen Routen liefern, wenn die Mindestanzahl von Nutzern unterschritten wird. Beim Auftreten von Fehlern sowie dem nicht Vorhandensein der nötigen Informationen und Daten zur Berechnung und Aufrechterhaltung des globalen Optimums soll die Stabilität des Systems also auf Kosten der Qualität der Routen gewährleistet werden. Dabei muss die Sinnhaftigkeit des Systems aber weiterhin sichergestellt werden um eine allgemeine 16
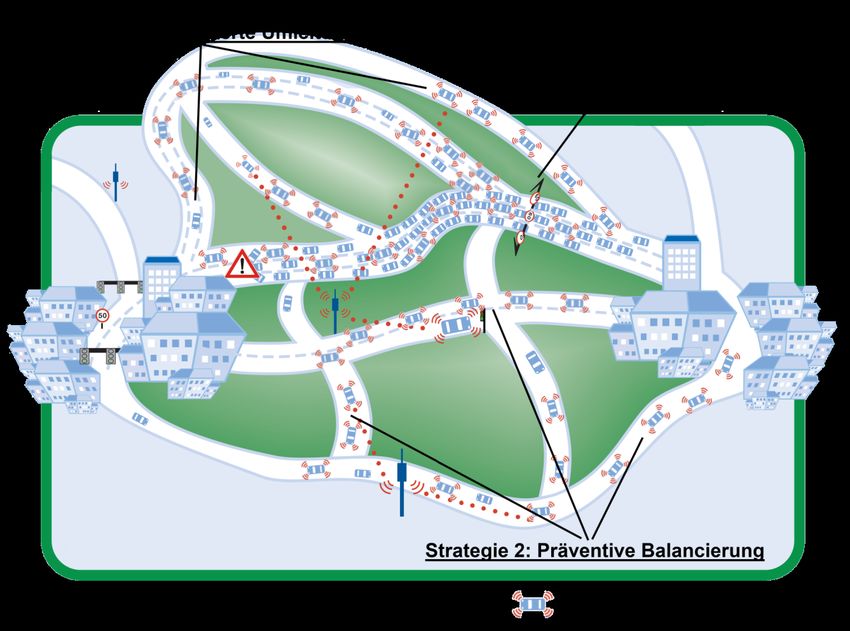
IT-basierte Ziellösung Verbesserung im Vergleich zur Routenberechnung ohne globale Optimierung möglichst lange zu gewährleistet. • Akzeptiert: Da der Erfolg eines solchen Systems maßgeblich von den Nutzern abhängig ist, welche die Anweisungen befolgen müssen, muss die Akzeptanz des Systems sehr hoch sein. Hier können Faktoren wie Zeit und Geld genutzt werden, um ein angemessenes Anreizsystem zu etablieren. Zentrale Komponente eines solchen Systems sind ohne Zweifel die zugrundeliegenden Algorithmen, auf deren Basis die individuellen Routenberechnungen im Sinne eines globalen Optimums durchgeführt werden. Da aktuelle Routingalgorithmen ausschließlich eine lokale Optimierung für den einzelnen Nutzer durchführen, müssen für das propagierte Navigationssystem neue, auf die ganzheitliche Vorgehensweise optimierte Algorithmen entwickelt werden. Neben der klassischen digitalen Straßenkarte welche die Datengrundlage für das Finden einer kürzesten oder schnellsten Route darstellt, spielen für eine globale Optimierung noch weitere Informationen eine Rolle. So müssen insbesondere die persönlichen Ziele der Verkehrsteilnehmer mit denen des allgemeinen Straßenverkehrs in Einklang gebracht werden. Insgesamt sind folgende Informationen notwendig: • Optimierungsziele der Verkehrsteilnehmer: Fahrtdauer, Streckenlänge, Verbrauch usw. • Geographische Ziele der Verkehrsteilnehmer • Straßenkapazität: Aktuelle und maximale Verkehrsdichte von Straßen • Allgemeine Verkehrssituation: Aktuelles und voraussichtliches Verkehrsaufkommen • Fahrzeugeigenschaften/Fahrzeugprofil: Fahrzeugklasse (LKW, PKW), Größe (Höhe, Breite, Länge), Gewicht, Maximale Geschwindigkeit, Ladung (Gefahrstoffe usw.) • Fahrerprofil (persönliche Ziele der Verkehrsteilnehmer): Gründe für die Fahrt (Urlaub, Arbeit, Transport/Logistik usw.), bevorzugter Straßentyp (Autobahn, Landstraße usw.), bevorzugte Route (schnellste, schönste, ökologischste, kürzeste usw.) • Weitere Straßenbeschaffenheit: Aktuelle Wetterlage, Gefahrenpotential, Maut/Kosten für Befahrung, Straßenstruktur (hügelig, kurvenreich), Straßenumgebung, Eignung für Schwerverkehr, Anzahl Ampeln usw. • Umweltbelastende Faktoren: Treibstoffverbrauch, Abgasbelastung, Lärmbelastung usw. Aber auch die technische sowie logische Architektur des Gesamtsystems nimmt einen großen Einfluss auf die Umsetzbarkeit der oben genannten Eigenschaften sowie auf die Ausprägung der Routingalgorithmen. So bieten aktuelle Technologien sowie zukünftige Entwicklungen im automotive Bereich verschiedene Möglichkeiten ein solches Gesamtsystem umzusetzen. 6.1. Client-Server Betrachtet man den Straßenverkehr auf seiner feingranularen Ebene als eine Vielzahl von Verkehrsteilnehmern, so liegt es für die Umsetzung der genannten Ziele nahe, eine zentrale Instanz zu nutzen, welche die ständige Sicht auf die aktuelle Lage behält und damit eine kontinuierliche Neuberechnung der individuellen Routen durchführt um die Verteilung der Verkehrsteilnehmer aufrecht zu erhalten. Umgesetzt als Client-Server-Architektur würde somit ein zentraler Server die aktuelle Lage anhand der gegebenen Informationen aufbereitet vorhalten. An diesen könnten sich 17
IT-basierte Ziellösung die teilnehmenden Nutzer wenden um ihre individuelle Route zu erhalten. Verändert sich auf Grund des hochdynamischen Straßenverkehrs die Verkehrslage kann je nach Vorgehensstrategie die Route für die Verkehrsteilnehmer angepasst und an diese übermittelt werden. Eine zentrale Instanz, welche zu jedem Zeitpunkt sämtliche Daten sammelt, aggregiert und bereithält bietet viele Vorteile im Kontext des geplanten Systems. Die globale Sicht auf die aktuelle Lage innerhalb eines unbegrenzt großen geographischen Bereichs sowie die Skalierbarkeit im Sinne der Rechenleistung sind dabei wohl die interessantesten Charakteristika. Auch aus technologischer Sicht bietet sich eine solche Architektur an, da alle notwendigen technologischen Grundlagen für eine Umsetzung vorhanden sind. Ermöglicht wird dies durch mobile Datenverbindungen wie UMTS, HSDPA und LTE sowie hoch verfügbare Cloud-Computing-Dienste. So werden viele Fahrzeuge schon seit Jahren bereits ab Werk mit verschiedenen Onlinediensten ausgestatten und bieten hierdurch die nötigen Abbildung 3: Client-Server-Architektur Kommunikationsmöglichkeiten. Wenngleich eine Client-Server-Architektur viele Vorteile mit sich bringt, welche eine Nutzung zur Umsetzung des propagierten Systems sinnvoll erscheinen lassen, so birgt eine solche Architektur auch große Schwachstellen. Durch die stark zentralisierte Struktur sowie die Abhängigkeit zur Infrastruktur in Form von mobilen Datennetzen wäre eine Client-Server Architektur sehr anfällig auf Kommunikationsabbrüche. In einem derart zeitkritischen Umfeld wäre ein angemessenes Verhalten im Sinne einer graceful degradation nicht ohne weiteres möglich, da weiterhin eine ausreichend schnelle Reaktion auf die sich verändernde Verkehrslage erforderlich ist. Aber auch die Bandbreiten sowie die Netzabdeckung aktueller mobiler Datennetze insbesondere im ländlichen Bereich würden für das Kommunikationsaufkommen der potenziell vielen tausend Fahrzeuge innerhalb einer einzelnen Funkzelle nicht ausreichen [20]. Nur durch massiven Ausbau von Mobilfunknetzen könnten ausreichend Kapazitäten geschaffen werden, um der ohnehin schon erwarteten Vervierfachung des IP-Traffics (2010 bis 2014) [21] standhalten zu können. Eine reine Client-Server-Architektur würde somit die notwendigen Anforderungen aus Kap. 6 nicht ausreichend erfüllen. Insbesondere die starke Infrastrukturabhängigkeit und die nicht ausreichend vorhandene Skalierbarkeit der Datennetze stellen große Nachteile einer solchen Architektur dar. Um die genannten Anforderungen an das System zu erfüllen und die Nachteile einer reinen Client-Server- Architektur zu vermeiden, muss die Architektur noch weiter verfeinert werden. 18
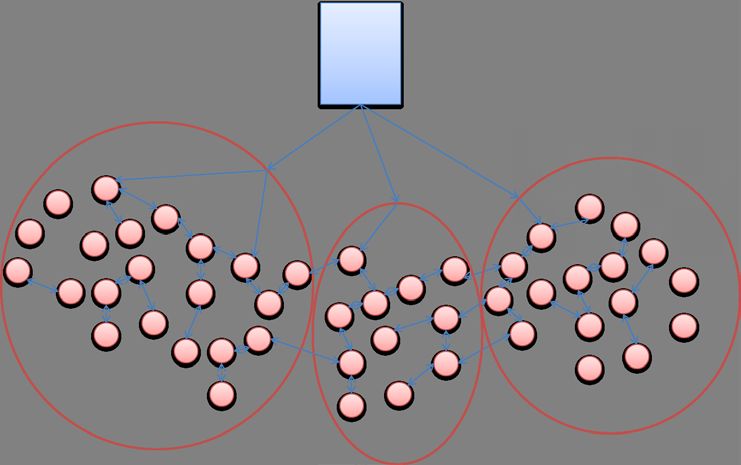
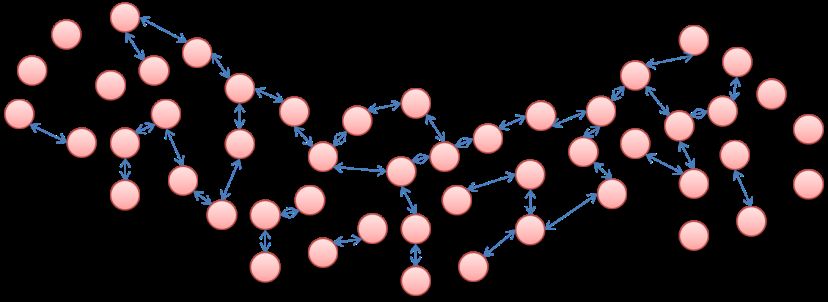
IT-basierte Ziellösung 6.2. Peer 2 Peer Einen gänzlich gegenteiligen Ansatz eine globale Optimierung im Sinne aller Verkehrsteilnehmer durchzuführen stellt die Nutzung von Algorithmen und Strukturen der Schwarmintelligenz 3 dar. Ähnlich einem Ameisenvolk, welches beim gemeinsamen Ziel der Nahrungssuche durch die Einhaltung bestimmter Verhaltensweisen [22] stets einen stabilen Verkehrsfluss ohne Behinderungen aufrechterhalten, könnte durch den direkten Austausch von relevanten Informationen zwischen den Fahrzeugen eine globale Optimierung im Sinne des Straßenverkehrs erreicht werden. Dabei würde das Wissen sowie die Neuberechnung der Routen nicht von einer zentralen Instanz kontrolliert und überwacht werden, sondern von den Verkehrsteilnehmern (von der Elektronik der Fahrzeuge!) selbst, welche als Teil des Straßenverkehrs zum Nutzen aller Informationen sammeln und weiterverbreiten aber gleichzeigt relevante Informationen von anderen Verkehrsteilnehmern aufnehmen und zum eigenen Wohl nutzen. So könnte nach dem Prinzip des Emergent Behaviors [23] durch kleine lokale Veränderungen das gesamte System ins Gleichgewicht gebracht werden, was im Falle des Straßenverkehrs durch einen stabilen und gut verteilten Verkehrsfluss dargestellt wird. Technologisch wird diese Herangehensweise durch die, in den letzten Jahren immer mehr in den Fokus der Wissenschaft geratene Technologie der Car-to-Car (C2C)- Kommunikation ermöglicht, welche einen direkten Informationsaustausch zwischen Fahrzeugen erlaubt. In Europa existiert hierzu eine Vielzahl von Abbildung 4: Peer 2 Peer-Architektur Projekten und Konsortien (z.B. simTD [24], COM2REACT [25], Car2Car Communication Consortium [26]) welche sich mit der Entwicklung und Nutzung der Technologie in verschiedenen Anwendungsfällen beschäftigen. Im Vordergrund der anwendungsorientierten Forschungsprojekte stehen dabei insbesondere die Erhöhung der Sicherheit im Straßenverkehr sowie die Verbesserung des Verkehrsflusses durch die fahrzeugbasierte Datenerfassung. So könnten beispielsweise entgegenkommende Fahrzeuge direkt nach einem Unfall, von anderen Fahrzeugen darüber informiert werden um weitere Unfälle zu vermeiden. Im Gegensatz zum zentralisierten Ansatz einer Client-Server-Architektur, könnte durch diese stark dezentralisierte Herangehensweise der Schwarmintelligenz, sofort auf Veränderungen im Straßenverkehr reagiert werden. Der Straßenverkehr würde sich somit eigenständig an die hochdynamischen Ereignisse anpassen. Hierdurch würde auch eine Infrastrukturabhängigkeit vermieden werden und gleichzeitig die Ausfallsicherheit durch die Vielzahl der Verkehrsteilnehmer erhöht werden. Damit sich lokale Veränderungen aber im Sinne des Emergent Behaviors positiv auf den globalen Verkehrsfluss auswirken, können individuelle Ziele nicht stark genug berücksichtigt werden, was die Akzeptanz des Systems senken und damit das Gesamtsystem schwächen würde. Dies liegt insbesondere in der Tatsache begründet, dass durch die angestrebten Algorithmen der Schwarmintelligenz Anpassungen und Veränderungen in nur sehr lokalen Bereichen möglich sind, da 3 „Verhalten von vielen Individuen, die nach einfachen Regeln handeln um komplexe Verhaltensmuster zu erzeugen“ [22]. 19
IT-basierte Ziellösung für eine globalere Sicht die nötigen Informationen fehlen. Dies gilt insbesondere in Gebieten mit einer geringen Straßendichte bzw. großer Unterschiede in den Straßenkategorien. Demnach werden Autobahnen bevorzugt befahren, wohingegen umliegende Strecken kaum genutzt werden. Durch die geringe Nutzung alternativer Strecken sinkt die Anzahl der Fahrzeuge die Informationen im Sinne eines global effizienten Routings sammeln wodurch eine globale Optimierung und somit eine balancierte Verteilung der Verkehrsteilnehmer nicht zu jedem Zeitpunkt gewährleistet werden kann. Eine voll dezentrale, auf Schwarmintelligenz basierende Vorgehensweise ist somit ebenfalls nicht ausreichend um den in Kapitel 6 gelisteten Anforderungen gerecht zu werden. Obwohl eine solche Lösung eine erhöhte Ausfallsicherheit und eine gänzliche Infrastrukturunabhängigkeit mit sich bringen würde, sind es genau diese Eigenschaften die im Falle einer zu geringen Dichte von Teilnehmern zum Verlust der Stabilität und Qualität des globalen Optimums führen können. 6.3. Clustered Swarm Sowohl die Client-Server- als auch die Peer 2 Peer-Architektur besitzen Eigenschaften, welche für die Umsetzung eines kooperativen Routingsystems im Straßenverkehr unerlässlich sind. Beide Architekturen weisen aber auch Nachteile auf, wodurch ein alleiniger Einsatz einer der beiden Herangehensweisen als nicht sinnvoll erachtet wird. Auf Grund der sehr gegensätzlichen Vorgehensweisen der beiden Architekturen lässt sich aber schnell feststellen, dass beide jeweils Merkmale mit sich bringen, durch die Nachteile des anderen ausgeglichen werden können. So ist der größte Vorteil der Client-Server-Architektur die sehr große Sichtweite bzw. die Möglichkeit der Aggregierung sämtlicher relevanter Informationen innerhalb eines unbegrenzt großen geographischen Gebietes. Zugleich ist die zentralistische Herangehensweise aber auch ihr größter Nachteil, da eine schnelle Reaktion auf das dynamische Verkehrsgeschehen auf Grund zu langer Übertragungszeiten bei zu vielen Verkehrsteilnehmern nicht möglich wird. Die schnelle Reaktion auf Veränderungen im Straßenverkehr stellt allerdings eines der Hauptmerkmale der Peer 2 Peer- Architektur dar und die unter Umständen eingeschränkte Sicht der Peer 2 Peer-Architektur kann wiederum durch die große Sichtweite der Client-Server-Architektur kompensiert werden. Es liegt also nahe, die beiden Architekturen zu kombinieren, um die Gesamtarchitektur derart zu erweitern, dass die Vorteile beider Architekturen die jeweiligen Nachteile eliminieren. 20
IT-basierte Ziellösung Abbildung 5: Kombinierte Architektur (Clustered swarm Architektur) Aber für welche Strategien und Vorgehensweisen zur Umsetzung der globalen Optimierung sind welche Systemeigenschaften notwendig und sinnvoll um diese realisieren zu können? Auf den ersten Blick bietet sich eine Zuordnung zwischen den angestrebten Lösungsstrategien aus Kapitel 5.2 und den Architekturen an. So bietet die Peer 2 Peer-Architektur alle nötigen Eigenschaften um die Strategie 2 zur präventiven Balancierung von Fahrzeugen umsetzen zu können. Bei näherer Betrachtung ist eine direkte Zuordnung und alleinige Abdeckung der Strategien durch eine bestimmte Architektur allerdings nicht sinnvoll. Selbst im Falle von Strategie 2 zur präventiven Balancierung von Fahrzeugen kann es beispielsweise durch eine zu geringe Anzahl an teilnehmenden Fahrzeugen oder einer zu geringen Nutzung alternativer Straßen notwendig werden, dass über eine zentrale Überwachungsinstanz wichtige Informationen an den Schwarm übermittelt werden. Ein solches unterstützendes Eingreifen durch Übermittlung gezielter Informationen ist auch für die anderen drei Strategien sinnvoll, wobei sich die Last je nach Strategie und Ausprägung der aktuellen Informationslage, unterschiedlich auf die beiden Vorgehensweisen bzw. Architekturen verteilt. So sind für die Berechnung global optimierter individueller Ausgangsrouten je nach Distanz, Informationen über einen sehr großen geographischen Bereich hinweg notwendig. Je nach Entfernung kann also entweder eine zentrale Instanz (große Distanzen), der Schwarm selbst (kurze Distanzen) oder eine Kombination aus beiden für die Berechnung der Routen zuständig sein. Auch im Falle der Strategie zur balancierten Umleitung von Fahrzeugen ist eine Kombination beider Vorgehensweisen erforderlich. Hierbei könnte der Verkehr stetig durch eine zentrale Instanz überwacht werden welche den Schwarm bei Bedarf durch gezielte Informationen handlungsfähig macht. Neben den Aufgaben Informationen zu sammeln und zu verteilen, welche von beiden Instanzen durchgeführt werden, würde im Gesamtsystem die zentrale Einheit also hauptsächlich als überwachende und der Schwarm als umsetzende Instanz agieren. Auf Basis der beschriebenen Verhaltensweisen und Eigenschaften wird eine Gesamtarchitektur vorgeschlagen, welche als Kombination einer zentralisierten (Client-Server) und einer dezentralisierten (Peer 2 Peer) Vorgehensweise alle nötigen Voraussetzungen erfüllt, um die angestrebte globale Optimierung im Sinne des Straßenverkehrs umsetzen zu können. Das Gesamtsystem sollte somit eine zentrale Überwachungsinstanz besitzen, welche Informationen über 21
Sie können auch lesen