Mensch-Roboter Kooperation - als Herausforderung und Lösung Interaktive Roboterprogrammierung vor dem Hintergrund variierender Applikationen - FFG
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Mensch-Roboter Kooperation
als Herausforderung und Lösung
Interaktive Roboterprogrammierung vor dem
Hintergrund variierender Applikationen
Ruth Maria Otto (Dipl. Math. Univ.)
Projektconsultant für Robotik und Automation
ruthmariaotto@ottoundpartner.de
Agenda • Kurzer Überblick über Mensch - Roboter- Kollaboration • Herausforderungen bei MRK Anwendungen • Vorteile • Möglichkeiten zur Umsetzung intuitiver Bedienung • Beispiele 29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 2

Formen der Mensch Roboter Kollaboration
keine feste Trennung,
virtueller Schutzzaun
Kontakt ungewollt,
unwahrscheinlich
(z.B. durch Lichtschranke)
Geteilter Arbeitsraum
gewollter Kontakt,
gleichzeitige Bewegung
(z.B. Handführen)
fester Schutzzaun Gemeinsamer
Kontakt ausgeschossen Arbeitsraum
Geteilter Arbeitsraum
Kontakt ungewollt,
Arbeitsraum aber möglich
des Roboters
Gemeinsamer Arbeitsraum, aber
exklusive Bewegung Kontakt
Arbeitsraum
des Werkers
möglich, aber wenn dann nur mit
stehendem Roboter
z.B. bei Industrieroboter als
Handlingsassistent
Quelle: KUKA Roboter GmbH
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 3
Auswahlkriterien für MRK Applikationen
• Anlage ist nicht voll automatisierbar (Platz / Applikation / Betriebsrat bzw.
Firmenpolitik)
• Der Arbeitsraum kann nicht komplett durch einen Schutzzaun abgetrennt werden
• Effizienz- bzw. Qualitätssteigerung durch:
• Ergonomie Verbesserung
• Paralleles Arbeiten von Mensch und Roboter Bild: www.scope-online.de
• Unterstützung des Menschen durch den Roboter (Abnehmen der Traglast /
Übernehmen eintöniger Tätigkeiten / Tätigkeiten, die eine Qualitätssteigerung
bewirken)
• Ist die Taktzeit erreichbar (meist keine deterministische Taktzeit möglich)
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 4
Was ist beim Aufbau einer MRK-Zelle zu beachten?
• Die aktuelle Norm EN ISO 10218-1:2011 besagt, dass der Roboter nur eine
Komponente in einem Robotersystem und an sich unzureichend für den
sicheren kollaborierenden Betrieb ist.
• Jede Applikation mit kollaborierendem Betrieb muss einer Risikoanalyse
unterzogen werden
• ISO/TS 15066 (kollaborierende Industrieroboter)
• Handführen, Geschwindigkeits- und Abstandsüberwachung, sicherheits-
gerichteter Stopp, Leistungs- und Kraftbegrenzung
• Zur Zeit als Empfehlung in Bearbeitung
• schwächer als Norm, aber eventuell zukünftig Übergang in Norm
Es ist immer die Gesamtzelle zu betrachten, nicht nur
der Roboter (Applikation, Spanner, Greiftechnik,
Roboter).
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 5
Bild: www.kuka.com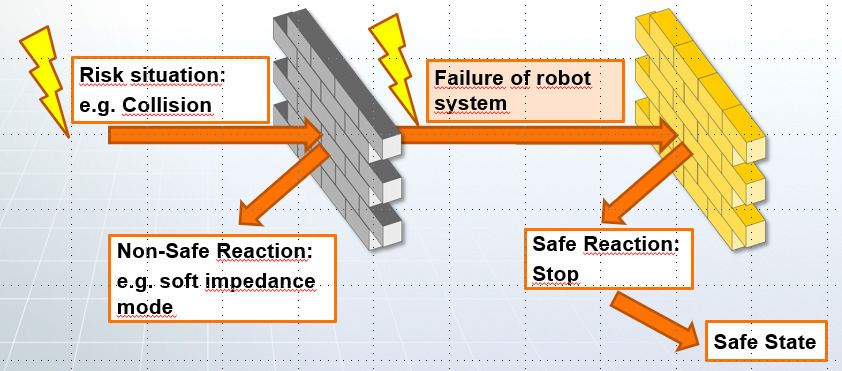
Normen und ISO/TS 15066
Handführung
zur Maschinenrichtlinie (MRL) Beschreibt Gefährdungen, die von Industrierobotern
harmonisierte Normen: ausgehen:
Sicherheitsstandards V=f
elektrische.Gefährdungen (Nachlauf,
mechanische Gefährdungen Risiko)
…
Geschwindigkeits- und Abstandsüberwachung
Schreibt Maßnahmen für Konstruktion,
Vermutungswirkung zur
Stabilität, Festigkeit, Energiequellen, … V≠ const
Erfüllung der MRL
Schutzeinrichtungen,
s≥smin
Sichere Steuerungsfunktionen (Not-Halt, Zustimmung
etc.) in PL d Kat 3, Abdeckungen …
und Benutzerdokumentation vor.
Sicherheits-gerichteter Stopp
s≥smin
spezifisch C- z.B. ISO 10218
Normen Industrieroboter - Sicherheitsanforderungen V=0
z.B. ISO 13849
B-Normen Sicherheit von Maschinen – Sicherheitsbezogene Leistungs- und Kraftbegrenzung
Teile von Steuerungen
ISO 12100 F≤Fmax
allgemein A-Normen Sicherheit von Maschinen – Grundbegriffe, p≤pmax
allgemeine Gestaltungsleitsätze
Bilder: BGHM/UMB
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 6
Herausforderungen bei MRK Anwendungen
• Sicherheit
• Roboter
• Greifer / Werkzeug
• Zuführung
• Stopps, Not-Halt, Überwachungen Quelle: KUKA Roboter GmbH
• Applikation (z.B. quasistatischer / transienter Kontakt)
• Wechselwirkung aus Produktivität Bedienerfreundlichkeit
• Unmittelbarer Zusammenhang
• Berücksichtigung aller notwendigen/nicht notwendigen
Eingriffsmöglichkeiten durch den Menschen in der Applikation
• Vertrauen zur Anlagenbeherrschbarkeit
• Verständnis und Sichtbarkeit der Unterstützung durch den Roboter
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 7
Vorteile durch MRK Anwendungen
• Verringerung der körperlichen Belastung für den Werker
• Nutzung der
Absolut- und Wiederholgenauigkeit des Roboters Bild: www.produktion.de
Nutzung der Sensitivität und der kognitiven Fähigkeit des Menschen
• Paralleles Arbeiten von Mensch und Roboter ohne räumliche Trennung
• Verringerung des Platzbedarfs
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 8
Beherrschen von variierende Anforderungen an eine Anlage
durch MRK Fähigkeit
• Erfahrung und Feinfühligkeit des Menschen
• Bestehende Sicherheitseinrichtungen
• Bediengeräte wie Roboter, Joystick, Zustimmungstaster, Bedientaster
• Zusätzliche Funktionen:
• Manipulation der Roboterbewegung ohne Programmierkenntnisse
• Freischalten unterschiedlicher Freiheitsgrade
• Vermeiden von Achsendstellungen und Singularitäten
• Einsatz von Virtuellen Wänden
• Gravitationskompensation
Bild: www.orangeapps.de
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 9
Beispiele für intuitive Bedienung
• Teachen von Punkten durch Drucktaster ohne Roboterprogrammiergerät
• Aufzeichnen von Bahnen zum späteren Abfahren ohne Programmierkenntnisse
• Gestensteuerung für die Ablaufkontrolle
• Joystick-gesteuerte Manipulation der Roboterposition
• Manuelle Positionierung des Roboters
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 10
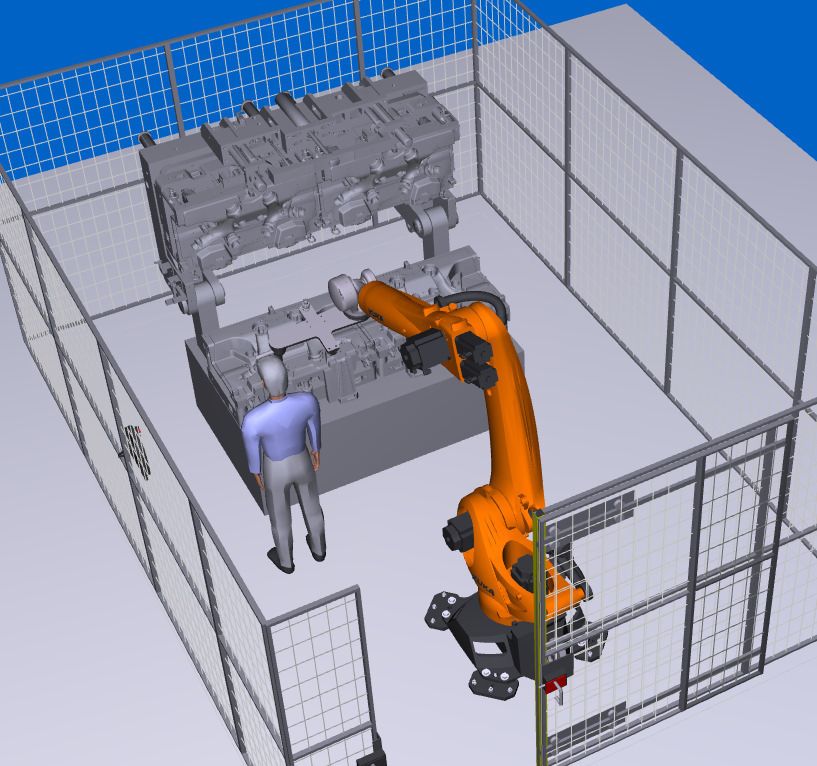
Bild: www.dlr.deBeispiel 1: Fixierung eines Unimag an einem Motorblock bei häufig variierender
Position des Großladungsträgers - Aufgabenstellung
Universelles Motoren Adapter-Gestell
29.05.2018 | Mensch-Roboter
SeiteKooperation
11 als Herausforderung und Lösung |Beispiel 1: Fixierung eines Unimag an einem Motorblock bei häufig variierender
Position des Großladungsträgers - Umsetzung
• Einmessen der Kiste über Handführen des Roboters • Handführen des Roboters zur Montage Endposition
• Griff in die Kiste für die Erkennung und die Entnahme • Gestensteuerung des Roboters im Prozessablauf
der Unimags
29.05.2018 | Mensch-Roboter
SeiteKooperation
12 als Herausforderung und Lösung |Beispiel 2: Intelligentes Stativ
• Aufgabenstellung
• 3D-Vermessung von Bauteilen -> Positionierung der Kamera (Automobil, Luftfahrt –
Industrie)
• Häufig variierende Bauteile
• Bediener muss während der Vermessung außerhalb der Kabine sein
• Anwender sind Messtechniker, keine Roboterprogrammierer
Notwendigkeit einer einfachen Teachfunktionalität
• Umsetzung
• Einlernen der Punkte durch manuelles Führen über einen Kraft-Momenten Sensor
• Kraft-Momenten Sensor zwischen Roboter und Kamera (Detektion von Kollisionen)
• Notwendigkeit einer Gravitationskompensation
• Sichere Bewegungsführung (Betriebshalt, Arbeitsräume, Geschwindigkeiten, ..)
• Eigenes, speziell angepasstes Bedienpanel
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 13Beispiel 3: Trockeneis-Stahlen
• Aufgabenstellung
• Gussformen Säubern durch Trockeneisstrahlen
• Geometrie der Gussformen variiert
Einfaches Einlernen der Bahnen durch SafeGuiding Paket
• Umsetzung
• Einlernen von Bahnen durch manuelles Führen über einen Kraft-
Momenten Sensor
• Kraft-Momenten Sensor neben dem Werkzeug
• Möglichkeit zur Demontage des Kraft-Momenten Sensors im Betrieb
• Sichere Bewegungsführung (Betriebshalt, Arbeitsräume,
Geschwindigkeiten, ..)
• Angepasste Benutzeroberfläche auf SmartPad oder Einzeltaster
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 15Beispiel 4: Qualitätssicherung KGH
• Aufgabenstellung :
• Qualitätssicherung Gießerei Kurbelgehäuse
• Zusätzlicher Anspruch an Ergonomie Verbesserung
• Roboter als Manipulator
• Technische Merkmale
• Bewegung des Roboters durch Joystick, um Bauteil geeignet zu orientieren
• Dreistufiger, zweikanaliger Zustimmungstaster und Not-Halt am
Bediengerät (konform DIN EN ISO 10218)
• Sichere Bewegungsführung (Betriebshalt, Arbeitsräume,
Geschwindigkeiten, ..)
• An- und Abfahrt im Automatikmodus
29.05.2018 | Mensch-Roboter Kooperation als Herausforderung und Lösung | 17Sie können auch lesen

















































