Untersuchung der menschlichen Wahrnehmung für die Interaktion mit Servicerobotern
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Bonner Zentrum für Lehrerbildung (BZL)
Untersuchung der menschlichen
Wahrnehmung für die Interaktion mit
Servicerobotern
Masterarbeit im Fach Informatik
Kira Bungert
2647677
Betreuerin: Prof. Dr. Maren Bennewitz
Wintersemester 2019/2020
Bonn, den 6. August 2020
ii

Erklärung
Ich versichere hiermit, dass die Masterarbeit mit dem Titel “Untersuchung der mensch-
lichen Wahrnehmung für die Interaktion mit Servicerobotern” von mir selbst und ohne
jede unerlaubte Hilfe selbständig angefertigt wurde, dass sie noch an keiner anderen
Hochschule zur Prüfung vorgelegen hat und dass sie weder ganz noch in Auszügen veröf-
fentlicht worden ist. Die Stellen der Arbeit – einschließlich Tabellen, Karten, Abbildun-
gen usw. –, die anderen Werken dem Wortlaut oder dem Sinn nach entnommen sind,
habe ich in jedem einzelnen Fall kenntlich gemacht.
Bonn, den
iii

Inhaltsverzeichnis
1 Einleitung 1
2 Stand der Forschung 3
2.1 Roboterdesign . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Verhaltensweisen von Service-Robotern . . . . . . . . . . . . . . . . . 4
2.3 Soziale Navigationsstrategien von Service-Robotern . . . . . . . . . . 5
3 Studien 7
3.1 Online-Studie: Haushaltsroboter . . . . . . . . . . . . . . . . . . . . . 7
3.1.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.1.2 Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Interviews . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.2 Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.3 Online-Studie: Aktivitätsregionen . . . . . . . . . . . . . . . . . . . . 22
3.3.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3.2 Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 VR-Studie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.4.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.4.2 Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.5 Labor-Studie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.5.2 Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4 Auswertung 39
4.1 F1: Wie sollte ein Serviceroboter designt werden? . . . . . . . . . . . 39
4.2 F2: Wie sollte sich ein Serviceroboter für Menschen positionieren und
bewegen? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
v
5 Zusammenfassung 43 Literaturverzeichnis 45 A Aktivitätsregionen-Studie 49 B Interviewleitfaden 57 vi

Kapitel 1
Einleitung
In der heutigen Zeit werden intelligente Systeme immer mehr in den Alltag von
Menschen integriert. So finden zum Beispiel Smart Home Systeme und Staubsaug-
roboter bereits vielfach Verwendung. Der Übergang zu mobilen Servicerobotern für
die Arbeit im Haushalt und in der Pflege ist der nächste logische Schritt. Damit
solche Roboter in private Haushalte einbezogen werden können, müssen Richtlinien
aufgestellt werden, die ein harmonisches Zusammenleben zwischen Menschen und
Robotern gewährleisten. Das Design und die Implementierung von Servicerobotern
muss entsprechend auf die Bedürfnisse und Wünsche von Menschen abgestimmt
werden.
Der Fokus der Literatur lag bisher darauf, dass Roboter Menschen nicht physisch
negativ beeinflussen, indem sie zum Beispiel den Weg blockieren. Im Gegensatz
dazu konzentriert sich diese Arbeit auf das psychische Wohlbefinden von Menschen
in Anwesenheit von Robotern.
Zu diesem Zweck wurden folgende Fragestellungen untersucht:
F1: Wie sollte ein Serviceroboter designt werden?
F2: Wie sollte sich ein Serviceroboter für Menschen positionieren und bewegen?
Zur Überprüfung der beiden Fragestellungen wurden fünf verschiedene Studien durch-
geführt und die Ergebnisse entsprechend ausgewertet: Um die optischen Ansprüche
von Menschen an einen idealen Service-Roboter zu identifizieren, wurden die Ergeb-
nisse von Interviews und einer Online-Studie zu Haushaltsrobotern verwendet. Zur
1
Kapitel 1 Einleitung Bestimmung der idealen Positionierung und Bewegungsmuster der Roboter wur- den die Ergebnisse einer weiteren Online-Studie zu Aktivitätsregionen und einer Labor-Studie verwendet. Für beide Fragestellungen wurden außerdem Ergebnisse einer Virtual Reality-Studie (im Folgenden VR-Studie) verwendet. Die Ergebnisse zeigen, dass Menschen einen Service-Roboter mit einem anthropo- morphen Design als optimal ansehen. Dabei darf der Roboter weder so klein sein, dass der Nutzer ihn übersehen würde, noch so groß, dass er diesen überragt. Der Ro- boter sollte sich im Haushalt unabhängig vom Nutzer bewegen, sowie seine Anwesen- heit und Intentionen klar erkennbar machen. Als Richtlinie sollte nach Möglichkeit ein Mindestabstand von 1,2 Metern eingehalten werden. Im Folgenden wird zunächst ein Überblick über den aktuellen Stand der Forschung gegeben (Kapitel 2). Anschließend werden die im Rahmen dieser Arbeit durchge- führten Studien (Kapitel 3) vorgestellt. Für jede Studie wird hier jeweils zunächst der Aufbau vorgestellt und anschließend die Ergebnisse dargelegt. Darauf folgend werden die Ergebnisse der Studien ausgewertet (Kapitel 4) und abschließend disku- tiert und zusammengefasst (Kapitel 5). 2
Kapitel 2
Stand der Forschung
Da Roboter begonnen haben immer mehr Teil des sozialen Lebens zu werden, wurde
das Forschungsfeld zu diesen in den letzten Jahren merkbar ausgebaut. Insbesondere
der Forschungszweig der sozialen Robotik hat sich stark weiterentwickelt [21].
Im folgenden wird das Forschungsgebiet in drei Kategorien vorgestellt. Zunächst
das Roboterdesign, dass sich mit der optischen Erscheinung von Service-Robotern
beschäftigt, anschließend das Verhalten von Service-Robotern, dass Aufschluss über
deren Sozialnormen gibt und zuletzt das Thema Navigationsstrategien, in dem es
um die Fortbewegung von Service-Robotern geht.
2.1 Roboterdesign
Die optische Erscheinung eines Roboters spielt eine wichtige Rolle, um die Zufrie-
denheit der Nutzer zu gewährleisten [21]. Aktuell unterscheidet sich das Aussehen
von Robotern je nach Herstellern und Aufgabengebieten. Dennoch lassen sich die
verschiedenen Designs nach Merkmalen sortieren. Fong et al. [12] stellen vier Ka-
tegorien vor, die die gängigsten Arten von Roboterdesigns widerspiegeln und nach
denen diese geordnet werden können. Diese Kategorien sind anthropomorph, zoo-
morph, karikierend und funktional.
Anthropomorphe Desings beschreiben Roboterdesigns, die an das Erscheinungsbild
eines Menschen erinnern. Diese Roboter haben in der Regel einen Kopf, zwei Ar-
me und zwei Beine. Häufig wird dem Roboter zusätzlich ein Gesicht gegeben. Laut
Duffy [9] eignen sich diese Roboterdesigns besonders gut für Roboter im sozialen
Kontext, da sie non-verbale Konversation imitieren können. Zoomorphe Roboter
3
Kapitel 2 Stand der Forschung
(a) (b) (c) (d)
Abbildung 2.1: Beispiele für typische Roboterdesigns aus der Literatur: (a) Anthropomorpher Ro-
boter Nao [28], (b) Zoomorpher Roboter LEGO BOOST [20], (c) karikierender Roboter Buddy [15],
(d) funktionaler Roboter Turtlebot Waffle [29].
erinnern an Tiere und sind denen sowohl in Optik als auch Verhaltensweisen nach-
empfunden. Karikierende Roboterdesigns sind keinem direktem natürlichem Vorbild
nachempfunden und konzentrieren sich statdessen auf einzelne Erscheinungsmerk-
male, um diese überspitzt darzustellen. Zum Beispiel werden so Augen oder Mün-
der imitiert [21]. Auch funktionelle Roboter sind nicht zwangsläufig einem Vorbild
nachempfunden. Diese Roboter werden speziell für ihre Aufgabenbereiche designt,
um möglichst effektiv arbeiten zu können. Bei diesen Robotern liegt der Fokus nicht
auf der optischen Erscheinung. In Abbildung 2.1 sind die Roboterkategorien durch
beispielhafte Roboter dargestellt:
Für die Arbeit als Service-Roboter werden typischerweise anthropomorphe und funk-
tionelle Roboter verwendet [21]. Aus diesem Grund werden in dieser Arbeit nur diese
beiden Designmodelle betrachtet.
2.2 Verhaltensweisen von Service-Robotern
In naher Zukunft sollen Service-Roboter eingesetzt werden, um dem Menschen im
Alltag zu assistieren. Dabei ist besonders wichtig, dass Verhaltensweisen eines Ro-
boters von Menschen nicht nur verstanden, sondern auch akzeptiert werden [5]. Ver-
schiedene Faktoren werden hier von Menschen auf psychischer Ebene wahrgenom-
men. Zum Beispiel sind der Abstand, den der Roboter zum Menschen einhält und die
Geschwindigkeit des Roboters entscheidende Faktoren für das Level an Komfort, das
vom Menschen wahrgenommen wird [5]. Satake et al. [31] fanden in einem Experi-
ment heraus, dass Roboter auf eine bestimmte Weise auf Menschen zugehen müssen,
42.3 Soziale Navigationsstrategien von Service-Robotern
damit diese Kommunikationsversuche des Roboters annehmen. Zum Beispiel scheint
der Blickkontakt zwischen Menschen und Robotern entscheidend für eine erfolgreiche
Kommunikation zu sein. Miyauchi et al. [22] haben aus diesem Grund eine Methode
für aktiven Augenkontakt zwischen Mensch und Robotern entwickelt. Kobayashi et
al. [17] behaupten zusätzlich, dass ein Roboter in der Lage sein sollte menschliche
Mimik zu imitieren, da diese notwendig für eine erfolgreiche Kommunikation sei.
Um sowohl die verbale als auch nonverbale Kommunikation zwischen Robotern und
Menschen zu verbessern haben Reed et al. [27] Studien durchgeführt, in denen die
Kommunikation zwischen Menschen untereinander untersucht wurden, in der An-
nahme, dass die Kommunikation zwischen Menschen und Robotern dieser möglichst
ähnlich ein sollte. Bisher wurden vor allem Verhaltensweisen von Service-Robotern
in Hinblick auf bestimmte Aufgabengebiete untersucht. Zum Beispiel wurden Sozia-
le Roboter von Kim et al. [16] verwendet, um mit autistischen Kindern zu lernen.
Allgemeine Richtlinien für Roboterverhaltensweisen wurden bisher nicht aufgestellt.
2.3 Soziale Navigationsstrategien von
Service-Robotern
In der Literatur existieren eine Vielzahl verschiedener sozialer Navigationsstrategien
für Roboter, jeweils abhängig von dem untersuchten Aufgabengebiet. Ein Überblick
über verschiedene Strategien wird von Kruse et al. [18] gegeben. Typische Aufga-
benbereiche sind:
• Ein Roboter folgt einem Menschen und beachtet dabei sozial akzeptierte Ab-
standsregeln, wie sie für Menschen gelten [35].
• Ein Roboter navigiert innerhalb einer Menschenmenge [1] [13].
• Roboter und Mensch haben eine gemeinsame Zielposition [10].
Entsprechend der verschiedenen Aufgaben wurden von den Autoren Metriken für
Navigationsstrategien festgehalten. Menschlicher Komfort (Abwesenheit von Stress
für Menschen), Natürlichkeit (Ähnlichkeit zwischen menschlichem Verhalten und
dem Verhalten des Roboters) und Sozialanpassung (Übernahme kultureller Konven-
tionen).
5Kapitel 2 Stand der Forschung In dieser Arbeit wird sich auf Navigationsstrategien mit den Merkmalen Langzeit- und Kurzzeitvorhersage, sowie sozial-konform und nicht sozial-konform konzentriert. Bei einer Kurzzeitvorhersage handelte es sich um eine Strategie, bei der der Robo- ter nur kurze Vorhersagen über die nächsten Aktivitäten eines Menschen treffen kann, zum Beispiel die Navigationsstragtegie Social Force von Ferrer et al. [11], bei der der Roboter einem Menschen zu seinem Zielort folgt und dabei seine un- mittelbar nächsten Bewegungen vorhersagt. Bei einer Langzeitvorhersage hingegen wird längerfristig in die Zukunft geplant, um zum Beispiel gemeinsame Zielorte zu identifizieren. Ein Beispiel für eine Navigationsstrategie mit Langzeitvorhersage ist Reinforcement Learning von Bayoumy et al. [2], wo ein Roboter den Zielort eines Menschen identifizieren kann und diesen unabhängig von Menschen zu erreichen ver- sucht. Sozial-konform und nicht sozial-konform unterscheiden, ob sozial festgelegte Normen eingehalten werden. Zum Beispiel werden sozial akzeptierte Mindestabstän- de, wie sie zwischen Menschen untereinander gelten, von Robotern eingehalten. Ent- sprechend wird bei einer sozial-konformen Navigationsstrategie, wie zum Beispiel die von Bruckschen et al. [4] vorgestellte Human Aware Prediction, ein Mindestabstand von 1,2 Metern zum Menschen eingehalten, während soziale Normen zum Menschen in einer nicht sozial-konformen Navigationsstrategie, wie einem klassischen Follower Ansatz [35], keine Rolle spielen. 6
Kapitel 3
Studien
In diesem Kapitel wird zu den durchgeführten Studien jeweils zunächst der Aufbau
vorgestellt und anschließend die Ergebnisse präsentiert.
Insgesamt wurden im Rahmen dieser Arbeit fünf Studien durchgeführt:
• Eine Online-Studie zum Thema Haushaltsroboter.
• Eine Interview-Studie zum Thema Haushaltsroboter.
• Eine Online-Studie zum Thema Aktivitätsregionen.
• Eine VR-Studie zum Thema Navigation von Robotern.
• Eine Labor-Studie zum Thema Navigation von Robotern.
3.1 Online-Studie: Haushaltsroboter
Die Online-Studie wurden mit Hilfe von Qualtrics erstellt und über Clickworker [7]
anonym durchgeführt. Um konsistent mit den anderen Studien dieser Arbeit zu
bleiben, wurde sich auf in Deutschland lebende Probanden beschränkt. Teilnahme-
voraussetzungen waren Deutschkenntnisse sowie ein Mindestalter von 18 Jahren. Die
Nutzerbasis von Clickworker entspricht nach eigener Angabe einem Querschnitt der
Bevölkerung [7]. Insgesamt haben 247 Probanden an dieser Studie teilgenommen.
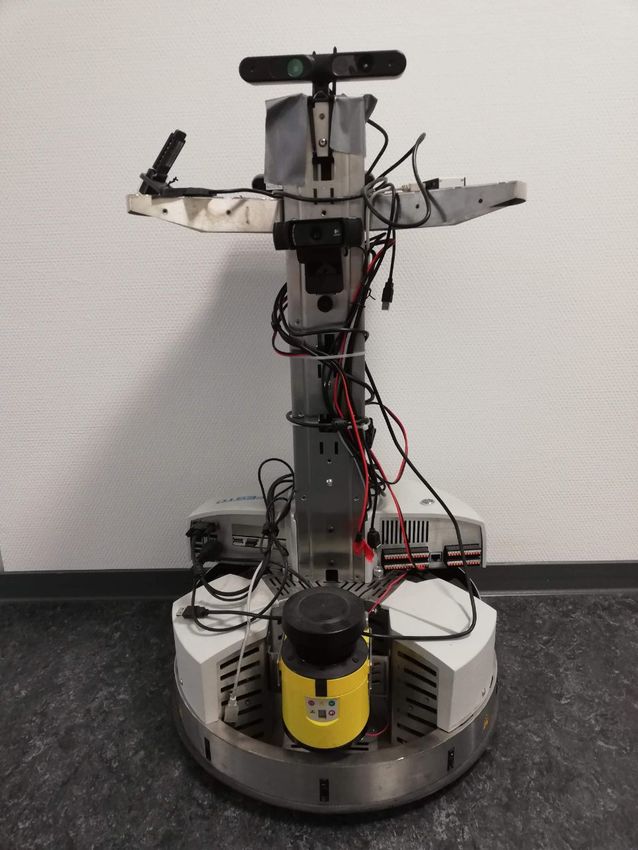
7Kapitel 3 Studien Die Studie beschäftigte sich primär mit der Fragestellung F1: Wie sollte ein Service- roboter designt werden?. Dafür wurden die Probanden nach ihren persönlichen Vor- lieben zu Verhaltensmustern und Aussehen eines Service-Roboters befragt. Zusätz- lich wurden die Probanden aufgefordert verschiedene Möglichkeiten von Tracking- Verfahren in Haushalten zu bewerten, die dazu beitragen sollen die Effizienz des Roboters zu steigern. 3.1.1 Aufbau Die Online-Studie wurde in vier Blöcke aufgeteilt. Im ersten Block wurden die Pro- banden gefragt, ob sie damit einverstanden wären, wenn ihnen ein Service-Roboter folgen würde. Bei dieser Frage standen als Antwortmöglichkeiten ausschließlich ”ja” und ”nein” zur Verfügung. Anschließend sollten die Probanden jeweils angeben, wel- ches von zwei angegebenen Merkmalen ihnen bei ihrem persönlichen Service-Roboter wichtiger wäre. Dazu mussten sie sich zum einen zwischen der Schnelligkeit und der Unauffälligkeit des Roboters entscheiden und zum anderen zwischen der Optik und der Arbeitseffizienz des Roboters. In beiden Fällen waren als Antwortmöglichkei- ten vierstufige Likert-Skalen angegeben, auf denen die Probanden jeweils die Wahl für hauptsächlich eines der beiden Merkmale bzw. eher eines der beiden Merkmale hatten. Der zweite Block des Fragebogens bestand aus Bildern, die einen Menschen und einen Human Service Robot (HSR) (vgl. Abb. 3.1) in verschiedenen Abständen zu- einander zeigten. Hier sollten die Probanden jeweils auf einer sechsstufigen Likert- Skala angeben, wie wohl sie sich in der Situation des Menschen fühlen würden. Als Antwortmöglichkeiten waren die Optionen ”sehr unwohl”, ”unwohl”, ”eher unwohl”, ”eher wohl”, ”wohl” und ”sehr wohl” angegeben. Insgesamt wurden den Probanden sieben Bilder gezeigt. Innerhalb dieses Blocks waren die Fragen in zufälliger Reihen- folge angeordnet, um eine Beeinflussung der Probanden zu vermeiden. 8
3.1 Online-Studie: Haushaltsroboter
Abbildung 3.1: Human Service Robot (HSR) [30].
Im dritten Block wurden die Probanden zu ihrer Meinung über Tracking-Verfahren
im Haushalt befragt. Dazu wurden drei verschiedene Tracking-Verfahren vorgestellt
und die Probanden gefragt, wie wohl sie sich mit dem jeweiligen Verfahren fühlen
würden. Folgende drei Verfahren wurden den Probanden vorgestellt:
• Der Nutzer trägt ein Armband, das nach Belieben ein- und ausgeschaltet wer-
den kann. Das Armband nimmt den Nutzer nur auf, während es eingeschaltet
ist.
• Im Haushalt des Nutzers sind sichtbare Kameras installiert. Die Kameras neh-
men den Haushalt durchgehend auf.
• Im Haushalt des Nutzers sind nicht sichtbare Sensoren installiert. Die Sensoren
sind durchgehend aktiv.
Für die Antworten wurde hier die gleiche Likert-Skala wie im zweiten Block verwen-
det. Um unaufmerksame Probanden zu erkennen, wurde in diesem Block zusätzlich
eine Aufmerksamkeitsfrage untergebracht. Probanden, die diese nicht korrekt beant-
worteten, wurden aussortiert.
Der letzte Block bestand aus Fragen zu dem präferierten Aussehen eines mögli-
chen Service-Roboters. Zunächst wurden den Probanden verschiedene Roboter auf
Bildern gezeigt. Auch hier wurde wieder die in dieser Studie bereits verwendete
sechsstufige Likert-Skala benutzt, um die Probanden angeben zu lassen, wie wohl
9Kapitel 3 Studien
sie sich mit einem solchen Roboter fühlen würden. Insgesamt wurden den Probanden
sechs Roboter (vgl. Tabelle 3.1) in zufälliger Reihenfolge gezeigt.
Turtlebot Waffle [29] Turtlebot 2i [24] REEM [23]
Human Service Robot [30] LEGO BOOST [19] Kara [8]
Tabelle 3.1: In Block 4, Frage 1: ”Geben Sie für die jeweiligen Roboter an, wie wohl Sie sich
mit einem solchen Roboter in Ihrem Haushalt fühlen würden.” vorgestellte Roboter aus der
Haushaltsroboter-Studie.
Anschließend wurden die Probanden gefragt, welche Service-Roboter sie persönlich
in ihrem privaten Haushalt beschäftigen würden. Als Auswahlmöglichkeiten standen
dafür elf Bilder von verschiedenen Robotermodellen zur Verfügung. Die vorgestell-
ten Bilder sind Tabelle 3.2 zu entnehmen. Auch hier waren die Bilder in zufälliger
Reihenfolge angeordnet, um die Probanden nicht zu beeinflussen.
103.1 Online-Studie: Haushaltsroboter
Kuri [33] Human Service Robot [30] Care’O’Bot [25]
LEGO BOOST [19] Turtlebot Waffle [29] REEM [23]
LEGO MINDSTORMS [26] Turtlebot 2i [24] Kara [8]
NAO [28] Pepper [32]
Tabelle 3.2: In Block 4, Frage 2: ”Welche der gezeigten Roboter würden Sie in Ihrem Haushalt
beschäftigen?” vorgestellte Roboter aus der Haushaltsroboter-Studie.
11Kapitel 3 Studien 3.1.2 Ergebnisse Im ersten Block dieser Studie gaben 60% der Teilnehmer an sich unwohl zu füh- len, wenn ihnen ein Roboter folgen würde. Den Probanden war es zudem bei ihrem persönlichen Service-Roboter wichtiger, dass dieser sich unauffällig verhält, anstatt dass er schnell arbeitet. Mit 48,18% wurde hier die Antwort ”eher unauffällig” ge- wählt, gefolgt von ”eher schnell” mit 32,79%. Die Optionen, die ausschließlich ei- ne Option zuließen waren bei den Probanden deutlich unbeliebter; ”schnell” mit 10,12% und ”unauffällig” mit 8,91%. Wesentlich eindeutiger waren die Ergebnis- se bei der Entscheidung zwischen Optik und Arbeitseffizienz. Hier sprach sich eine Mehrheit von 85,83% für das Merkmal Arbeitseffizienz aus. 47,37% der Probanden wählten ”eher Arbeitseffizienz” als Antwortmöglichkeit, 38,46% gaben an, dass nur ”Arbeitseffizienz” eine Rolle spielen würde. 10,93% der Probanden gaben an, dass ihnen ”eher Optik” wichtig wäre, während nur 3,24% sich ausschließlich für ”Optik” aussprachen. Anhand der Ergebnisse des zweiten Blocks der Online-Studie kann abgelesen wer- den, in welcher Positionierung sich die Probanden mit einem Human Service Ro- bot (HSR) am wohlsten fühlen. Die vollständig aufgelisteten Ergebnisse des zweiten Blocks sind Tabelle 3.3 zu entnehmen. Es zeigt sich, dass der Großteil der Proban- den sich insgesamt ”wohl” bis ”eher wohl” in den verschiedenen vorgegebenen Si- tuationen fühlen würden. Als angenehmste Situation wurde eine Positionierung von Mensch und Roboter in einem Abstand von etwa 2 Metern angesehen, wo Mensch und Roboter einander zugewandt waren. Nähere Positionierungen bei denen Mensch und Roboter miteinander interagierten wurden zunehmend als unangenehmer wahr- genommen. Am unangenehmsten wurde die Situation, bei der der Mensch direkten Kontakt (Händeschütteln) mit dem Roboter hatte, angesehen. Für Situationen, in denen sich der Roboter hinter dem Menschen befand, zeigte sich, dass die Probanden kleinere Abstände (unter 2 Metern) als deutlich angenehmer empfanden als größere Abstände. Für sehr geringe Abstände (unter einem Meter) empfanden die Proban- den es überwiegend sogar als angenehmer mit dem Rücken zum Roboter zu stehen, anstatt ihn direkt anzusehen. 12
3.1 Online-Studie: Haushaltsroboter
sehr eher eher sehr
gezeigte Bilder wohl unwohl
wohl wohl unwohl unwohl
10,12% 32,39% 36,84% 13,77% 5,67% 1,21%
15,38% 31,98% 32,79% 10,53% 5,26% 4,05%
7,69% 31,17% 38,87% 15,38% 4,45% 2,43%
4,86% 18,22% 26,72% 27,94% 18,22% 4,05%
6,48% 23,48% 29,15% 27,13% 12,15% 1,62%
8,1% 27,53% 34,82% 22,27% 5,67% 1,62%
10,53% 28,34% 33,6% 19,43% 6,48% 1,62%
Tabelle 3.3: Fragestellungen aus Block 2 der Haushaltsroboter-Studie als entsprechendes Bild mit
den abgegebenen Antworten entsprechend der Likert-Skala in Prozent. Abstände von mehr als
2 Metern zwischen Mensch und Roboter werden als angenehmer wahrgenommen.
13Kapitel 3 Studien
Entsprechend der Ergebnisse des dritten Blocks (vgl. Tabelle 3.4) zeigt sich, dass die
meisten Probanden sich ”eher wohl” bis ”unwohl” mit einem Tracking-System im
eigenen Haushalt fühlen würden. Am angenehmsten wurde die Überwachung durch
ein Armband angesehen, welches selbstständig ein- und ausgeschaltet werden kann.
Die Mehrheit der Probanden mit 29,55%, würde sich mit einer solchen Methode
”eher wohl” fühlen. Als unangenehmstes Verfahren wurde die Überwachung durch
Kameras angesehen. Eine Mehrheit von 36,44% der Probanden würde sich durch
solche Aufnahmen ”sehr unwohl” in ihrem Haushalt fühlen.
sehr eher eher sehr
Frage: wohl unwohl
wohl wohl unwohl unwohl
Armband: 6,88% 18,62% 29,55% 21,86% 11,74% 11,34%
Kameras: 3,24% 6,48% 13,36% 21,05% 19,43% 36,44%
Sensoren: 3,64% 13,36% 21,86% 25,1% 14,57% 21,46%
Tabelle 3.4: Fragestellung aus Block 3 der Haushaltsroboter-Studie als entsprechendes, vorgestelltes
Tracking-Verfahren mit den abgegebenen Antworten entsprechend der Likert-Skala in Prozent.
Die Ergebnisse des vierten Blocks lassen Rückschlüsse auf die Präferenzen der Pro-
banden in Bezug auf die Optik eines Haushaltsroboters ziehen. Entsprechend der
Ergebnisse aus der ersten Frage des Blocks, dargestellt in Tabelle 3.5, lässt sich
ablesen, dass das Robotermodell REEM am unangenehmsten von den Probanden
wahrgenommen wurde. Dieser war der einzige gezeigte Roboter, bei dem über 50%
der Probanden ”eher unwohl” bis ”sehr unwohl” angaben. Der Großteil der Proban-
den würde sich mit diesem Roboter in ihrem Haushalt ”eher unwohl” fühlen. Auch
wurde bei keinen anderen der zur Auswahl gestellten Roboter von mehr Probanden
die Antwortmöglichkeit ”sehr unwohl” ausgewählt. Die größte Diskrepanz zwischen
den Antworten der Probanden gab es zu dem Haushaltsroboter Kara aus dem Vi-
deospiel Detroit: Become Human [8]. Bei diesem Roboter handelt es sich um einen
rein virtuell existierenden Roboter, der beinahe vollständig wie ein Mensch aussieht,
mit der Ausnahme eines kleinen LED-Lichts an der Seite des Kopfes. Mit diesem
menschlich aussehendem Roboter würden sich 13,39% der Probanden, mehr als bei
jedem anderem vorgestelltem Roboter, ”sehr wohl” fühlen. Allerdings wählten auch
15,48% der Probanden ”sehr unwohl” als Antwortmöglichkeit aus. Die meisten po-
sitiven Antworten (”sehr wohl” bis ”eher wohl”) wurden mit insgesamt 70,29% für
den LEGO BOOST abgegeben.
Die Ergebnisse der zweiten Frage dieses Blocks (vgl. Abb. 3.2) zeigen, dass die Mehr-
heit der Probanden die meisten der gezeigten Roboter für ihren Haushalt verwenden
143.1 Online-Studie: Haushaltsroboter
würden. Nur die Robotermodelle REEM, LEGO MINDSTORMS und der Turtle-
bot 2i wurden von weniger als 50% der Probanden ausgewählt. Am häufigsten wurde
der Roboter Kuri von 90% der Probanden ausgewählt.
15Kapitel 3 Studien
sehr eher eher sehr
gezeigte Bilder: wohl unwohl
wohl wohl unwohl unwohl
4,18% 25,1% 29,71% 22,18% 14,23% 4,6%
Turtlebot Waffle [29]
3,35% 13,81% 33,05% 29,29% 13,81% 6,69%
Turtlebot 2i [24]
4,18% 14,64% 15,9% 25,1% 21,76% 18,41%
REEM [23]
8,79% 23,01% 34,73% 21,76% 6,69% 5,02%
Human Service Robot [30]
9,21% 25,1% 35,98% 19,25% 7,11% 3,35%
LEGO BOOST [19]
13,39% 17,57% 20,5% 21,34% 11,72% 15,48%
Kara [8]
Tabelle 3.5: Fragestellungen aus Block 4.1 der Haushaltsroboter-Studie als entsprechendes Bild mit
den abgegebenen Antworten entsprechend der Likert-Skala in Prozent. Anthropomorphe Designs
wurden am positivsten wahrgenommen.
163.1 Online-Studie: Haushaltsroboter
Abbildung 3.2: Ergebnisse zu Block 4, Frage 2: ”Welche der gezeigten Roboter würden Sie in Ihrem
Haushalt beschäftigen?”. Am häufigsten wurde der Roboter Kuri von Probanden ausgewählt.
Zusammenfassend lassen sich folgende Schlüsse in Bezug auf die Fragestellung F1: Wie
sollte ein Serviceroboter designt werden? ziehen:
Die meisten Probanden stufen die Optik des Haushaltsroboters als deutlich weniger
relevant ein als deren Arbeitseffizienz. Bevorzugen würden die Probanden allerdings
mehrheitlich einen Roboter, der an menschliches Aussehen angelegt, allerdings noch
deutlich als Roboter zu erkennen ist. Favorisiert wurden hier Modelle wie Kuri, Nao
und LEGO BOOST, die alle eine kindliche Optik aufweisen, die an ein Spielzeug
erinnert. Entsprechend wird ein anthropomorphes Design für Haushaltsroboter be-
vorzugt.
Für F2: Wie sollte sich ein Serviceroboter für Menschen positionieren und bewe-
gen? lässt sich aus der Studie schließen, dass ein Haushaltsroboter sich nicht aus der
Entfernung einem Menschen von hinten nähern sollte. Zusätzlich wurde es von den
Probanden bevorzugt, wenn der Roboter einen Mindestabstand von zwei Metern
einhielt und keinen direkten Körperkontakt zum Menschen hatte.
17Kapitel 3 Studien 3.2 Interviews Zusätzlich zu den Online-Studien wurde eine Interview-Studie durchgeführt. Hier wurden die Vorlieben der Probanden sowohl zu der Optik als auch zum Verhalten von Service-Robotern abgefragt. Die Ergebnisse dieser Studie ergänzen die Ergebnisse der Online-Studien und dienten als Basis für die nachfolgenden VR- und Labor- Studien. Die Interviews wurden im Rahmen der Grounded Theory [6] aufgebaut. Die Fragen basierten auf einem selbst erstellten Leitfaden und dauerten jeweils 6 bis 12 Minuten. Während der Durchführung wurden die Interviews als Audioaufnahmen festgehalten und zu einem späteren Zeitpunkt ausgewertet. Insgesamt wurden acht Probanden interviewt. Bei allen Teilnehmern handelte es sich um Angehörige der Rheinischen Friedrich-Wilhelms-Universität Bonn. Das Alter der Teilnehmer lag zwischen 18 und 35 Jahren. 3.2.1 Aufbau Der Leitfaden wurde als Vorstudie für die anschließend folgenden weiteren Studi- en erstellt. Die Fragen konzentrierten sich vor allem auf die optische Erscheinung des Roboters, welche Aufgaben dieser im Haushalt übernehmen sollte und welchen Richtlinien der Roboter zu folgen hätte. Zusätzlich wurde nach der Möglichkeit von einer Unterstützung des Roboters durch Sensoren gefragt. Der vollständige Inter- viewleitfaden befindet sich im Anhang B: Interviewleitfaden. Der Interviewleitfaden ist in drei Themenbereiche aufgeteilt. Die genaue Reihen- folge und Formulierungen der Fragen wurde dabei je nach Verlauf des Interviews angepasst. Im ersten Teil des Interviews wurde nach der allgemeinen Meinung der Probanden zu Service-Robotern gefragt und welche Aufgaben von einem solchen Roboter über- nommen werden sollten. Außerdem wurde darauf eingegangen, welche Aufgaben ein Roboter nicht übernehmen dürfe. Zu diesem Zweck wurde explizit nach der Zuberei- tung und Ausgabe von Lebensmitteln und Medikamenten gefragt und ob es einem Service-Roboter erlaubt wäre, dem Menschen zu folgen. 18
3.2 Interviews
Der zweite Teil war auf die optische Erscheinung des Service-Roboters fokussiert.
Zu diesem Zweck wurden die Probanden gefragt, wie ihrer Meinung nach ein idealer
Service-Roboter aussehen sollte und wie wichtig sie dessen Erscheinung im Vergleich
zu seiner Effizienz bewerten. Außerdem wurden den Probanden jeweils vier Bilder
(vgl. Abb. 3.6) von Robotern gezeigt aus denen sie den Roboter wählen sollten, den
sie bevorzugt in ihrem Haushalt beschäftigen würden.
Turtlebot Waffle [29] LEGO BOOST [19]
Human Service Robot [30] Kuri [33]
Tabelle 3.6: In den Interviews vorgestellte Roboter. Als bevorzugte Modelle wurden der Human
Service Robot und Kuri angesehen.
Im letzten Teil wurde nach der Meinung der Probanden zur Verwendung von Tracking-
Verfahren im eigenen Haushalt gefragt. Es wurde hierbei davon ausgegangen, dass
der Roboter diese Verfahren zur Verbesserung seiner Arbeit verwenden würde. Zu-
sätzlich wurden drei verschiedene Ideen von Tracking-Verfahren vorgestellt, aus de-
nen die Probanden das geeignetste wählen sollten. Bei der ersten Verfahrensmöglich-
keit wären Kameras sichtbar in der Wohnung verteilt, die dauerhaft aufzeichnen und
Informationen an den Roboter weiter geben. Im zweiten Verfahren würden Sensoren
statt Kameras verwendet werden, die für den Menschen nicht offen sichtbar wären.
Diese würden ebenfalls dauerhaft aufzeichnen und Informationen an den Roboter
19Kapitel 3 Studien weitergeben. Im letzten Verfahren würden die Probanden ein Armband bekommen, das den Menschen nur aufzeichnet, solange es eingeschaltet ist. 3.2.2 Ergebnisse Die Probanden waren dem Thema Service-Roboter gegenüber neutral bis positiv eingestellt. 62,5% der Probanden gaben an, sich selbst einen Service-Roboter an- schaffen zu wollen, wenn der Stand der Technik und ihre finanzielle Lage dies er- lauben würden. Die verbleibenden 37,5% der Probanden gaben an zum Zeitpunkt des Interviews keinen Service-Roboter zu benötigen, aber darüber nachzudenken, falls sich ihre persönliche Situation verändern sollte. Als Aufgaben, die ein solcher Roboter für die Menschen erledigen sollte wurden Putzen, Aufräumen und Wäsche waschen benannt. Jeweils einzelne Probanden wollten zusätzlich, dass der Roboter eine Spülmaschine ausräumt, staubsaugt und kocht. Das Zubereiten und Ausschenken von Nahrungsmitteln sahen die Probenden als unkritisch an. Größere Bedenken hingegen wurden gegenüber der Zusammenstel- lung und Ausgabe von Medikamenten geäußert. 25% der Probanden gaben an sich grundsätzlich keine Medikamente von einem Roboter geben zu lassen, 37,5% der Pro- banden würde die vom Roboter gegebenen Medikamente noch einmal selbstständig überprüfen. Nur 25% der Probanden würden die Medikamente völlig bedenkenlos zu sich nehmen. Ein Proband gab an sich bei dem Thema sehr unsicher zu sein. Auf die Frage, ob der Roboter schnell oder unauffällig arbeiten solle gaben die Pro- banden sehr unterschiedliche Antworten. 75% der Probanden gaben anstatt der ge- fragten weitere Kriterien an, die ein Roboter erfüllen sollte. Der Roboter müsse nicht völlig unauffällig sein. Es wäre in Ordnung den Roboter zu sehen und ihn bei der Arbeit beobachten zu können; allerdings solle sich der Roboter leise verhalten und keine Unordnung hinterlassen. Außerdem wären die bevorzugten Arbeitszeiten des Roboters, wenn die Menschen nicht Zuhause sind. Auch äußerten 25% der Pro- banden bei ihrer Antwort zusätzlich, dass der Roboter möglichst gewissenhaft und selbständig arbeiten sollte. Bezüglich der Bewegungen des Roboters im Haushalt waren sich die Probanden sehr einig, dass der Roboter vor allem Kollisionen mit Menschen vermeiden müsse. Die Hälfte der Probanden würde es außerdem bevorzugen, dass der Roboter sich be- merkbar macht, bevor er sich einem Menschen nähert. Zusätzlich solle der Roboter sich nicht von hinten auf den Menschen zu bewegen. 20
3.2 Interviews
Dass der Service-Roboter dem Menschen im Haushalt hinterherläuft sahen 75% der
Probanden als unkritisch an solange der Roboter einen erkennbaren Grund für sein
Verhalten hat. Es war jedoch nicht gewünscht, dass der Roboter dem Menschen ohne
erkennbare Intention folgt. 25% der Probanden gaben zusätzlich an, dass die sich
wünschen würden, dass der Roboter einen gewissen Sicherheitsabstand einhalten
würde. 12,5% der Probanden gaben außerdem an, dass der Roboter dem Menschen
nicht außerhalb des eigenen Haushalts folgen dürfe. Grenzen, welche Aufgaben ein
Roboter auf keinen Fall übernehmen oder welche Räume er nicht betreten dürfte,
wurden nur sehr vereinzelt genannt. Hier waren keine Mehrheiten für Verhaltensre-
geln eines Roboters zu erkennen.
Zur optischen Gestaltung des Roboters hatten die Probanden unterschiedliche Mei-
nungen. 37,5% der Probanden gaben an, dass sie einen humanoiden Roboter be-
vorzugen würden, während 25% wiederum deutlich klar machten, dass der Roboter
nicht zu menschlich aussehen dürfte. Ähnliche Aussagen wurden bezüglich der Grö-
ße des Roboters getätigt. 37,5% der Probanden gaben an, dass der Roboter nicht zu
groß sein dürfte und wieder 37,5% der Probanden sagten, dass er nicht zu klein sein
dürfte. Als zu groß wurden von den Probanden Roboter angesehen, die größer wären
als sie selbst. Als zu klein wurden Roboter angesehen, die schnell übersehen werden
könnten und die Gefahr bestände, dass Menschen über den Roboter stolpern oder
darauf treten. Ein Proband gab als optimale Größe einen Wert zwischen 50 cm und
70 cm an. Relativ einig waren sich die Probanden mit 75% jedoch, dass der Roboter
eine geschlossene Form haben solle, sodass weder lose Kabel noch spitze Ecken und
Kanten zu sehen sein sollten.
Alle Probanden gaben an, dass die Effizienz des Roboters deutlich wichtiger wäre
als dessen optisches Erscheinungsbild. 62,5% Probanden fügten jedoch hinzu, dass
der optische Faktor nicht vollkommen unerheblich für die Kaufentscheidung eines
Serviceroboters sei, da der Roboter sich als Objekt im privaten Wohnraum befinden
würde.
Um einen Eindruck zu gewinnen, welche Robotermodelle von den Probanden bevor-
zugt werden, wurden ihnen die in Abbildung 3.6 dargestellten Bilder gezeigt. Von
den gezeigten Robotermodellen bevorzugten die Probanden die Modelle Human Ser-
vice Robot und Kuri. Hier wurde hauptsächlich mit der Funktionsweise und Größe
argumentiert, welche die Probanden den Robotern zuschrieben. Der Turtlebot Waffle
wurde als zu klein wahrgenommen, um größere Aufgaben im Haushalt erfüllen zu
können, während der LEGO BOOST zu sehr an ein Spielzeug erinnerte. Die Hälfte
21Kapitel 3 Studien der Probanden bestätigte nochmal, dass die Funktionalität hier der entscheidendere Faktor für sie wäre. In Bezug auf Tracking-Verfahren waren sich die Probanden sehr einig, dass sie keine Informationen an außenstehende Personen weiter gegeben haben wollen. Unter der Bedingung, dass die Informationen nur lokal im Roboter verarbeitet werden, wären 62,5% der Probanden mit Tracking-Verfahren in ihrem Haushalt einverstanden. Bei den drei vorgestellten Verfahrensmöglichkeiten zum Tracking innerhalb der Woh- nung wurde sehr klar die Möglichkeit eines ein- und ausschaltbaren Armbands be- vorzugt. Die Probanden gaben an, dass ihnen die Möglichkeit des Ausschaltens ein größeres Gefühl der Kontrolle geben würde. Am wenigsten beliebt war die Option bei der Kameras im Haus installiert wären, auch wenn 25% der Probanden zugaben, dass dies vermutlich am ehesten die Performanz des Roboters optimieren könn- te. Eine Aufzeichnung durch nicht sichtbare Sensoren, anstatt sichtbaren Kameras, würden die Probanden eher akzeptieren, da sie sich durch diese Sensoren weniger beobachtet fühlen würden als durch Kameras. Für die Fragestellung F1 Wie sollte ein Serviceroboter designt werden? lassen sich aus der Interview-Studie folgende Ergebnisse festhalten: Wie schon in der Online- Studie zu Haushaltsrobotern wurde auch hier deutlich, dass die Arbeitseffizienz des Roboters deutlich entscheidender ist, als seine optische Erscheinung. Im Gegensatz zu der Online-Studie hatten die Probanden hier die Chance zusätzlich klar zu äußern, dass das optische Erscheinungsbild des Roboters allerdings nicht zu vernachlässigen wäre. Auch hier bevorzugten die Probanden eine anthropomorphe Optik. Als neuer Aspekt wurde hier die geschlossene Form des Roboters thematisiert. Den Proban- den war es besonders wichtig, dass sich keine losen Kabel oder spitze Kanten an dem Roboter befinden. Außerdem wurde zusätzlich festgehalten, dass die Größe des Roboters kleiner sein sollte, als der Mensch, der diesen Roboter verwendet. Dennoch muss der Roboter allerdings groß genug sein, dass Menschen nicht versehentlich über ihn stolpern. 3.3 Online-Studie: Aktivitätsregionen In dieser Studie wurde die Fragestellung F2: Wie sollte sich ein Serviceroboter für Menschen positionieren und bewegen? untersucht. Die Studie hatte zum Ziel Asso- 22
3.3 Online-Studie: Aktivitätsregionen
ziationen zwischen Objekten sowie Objekten und Aktivitäten zu identifizieren. Auf
Basis der Ergebnisse können zusammenstehende Objekte als Region mit einheitli-
cher Aktivität zusammengefasst werden. Anhand dieser Regionen können wiederum
Zuständigkeitsbereiche für Service-Roboter festgelegt werden.
Diese Online-Studie wurde ebenfalls mit Qualtrics erstellt und über Clickworker
durchgeführt [7]. Es galten die gleichen Rahmenbedingungen wie bei der Online-
Studie: Haushaltroboter; die Teilnehmer entsprachen einem Querschnitt der erwach-
senen deutschen Bevölkerung [7]. Insgesamt nahmen 106 Teilnehmer an der Studie
teil.
3.3.1 Aufbau
Die Fragen wurden in vier Blöcke unterteilt. Innerhalb der Blöcke waren Fragen und
Antwortmöglichkeiten jeweils in zufälliger Reihenfolge angeordnet, um einen Bias zu
vermeiden.
Im ersten Block wurden den Probanden verschiedene Fotos gezeigt auf denen Mö-
belstücke zu sehen waren, die in verschiedenen Farben zueinander gruppiert wurden
(vgl. Abb. 3.3). Die Probanden wurden gebeten anzugeben, welche dieser Gruppie-
rungen ihnen am natürlichsten erschien.
Abbildung 3.3: Beispielfrage aus Block 1: ”Welche Gruppierung der Objekte erscheint Ihnen na-
türlicher?”
Auf diesen Fotos waren insgesamt neun verschiedene Möbelgruppen, bestehend aus
Tischen, Stühlen, Sesseln und Sofas, zu sehen. Diese Möbelstücke wurden jeweils in
unterschiedlichen Abständen zueinander platziert und aus verschiedenen Winkeln
23Kapitel 3 Studien
fotografiert. Für die Abstände wurden jeweils Abmessungen von unter einem Me-
ter, einem Meter, zwei Metern und über zwei Metern gewählt. Insgesamt wurden
15 Fragen dieser Art gestellt.
Anschließend wurden die Probanden im zweiten Block gefragt, welche Gegenstände
sie in der Nähe von anderen Gegenständen erwarten würden. Dafür wurde jeweils
ein Gegenstand gezeigt und zehn weitere Gegenstände als Auswahlmöglichkeiten
angeben. Es wurden die folgenden elf Gegenstände verwendet: Tisch, Stuhl, Regal,
Sofa, Kommode, Kühlschrank, Toilette, Waschbecken, Mikrowelle, Kaffeemaschine
und PC. Die Teilnehmer sollten bewerten für wie wahrscheinlich sie es halten, dass
der genannte Gegenstand in der Nähe des zuvor genannten Gegenstands ist. Dies
wurde mit Hilfe einer sechsstufigen Likert-Skala abgefragt. Auf der Skala konnten
Werte zwischen "sehr unwahrscheinlich" und "sehr wahrscheinlich" angegeben wer-
den. Insgesamt wurden sechs Fragen dieser Form gestellt. Zwischen diesen Fragen
war zusätzlich eine Aufmerksamkeitsfrage untergebracht, um unaufmerksame Pro-
banden herauszufiltern. Die Ergebnisse dieser Probanden wurden für die Auswertung
nicht mit einbezogen.
Die Fragen im dritten und vierten Block der Studie waren jeweils an eine Aktivität
geknüpft. In Block drei handelte es sich um die Aktivität ”Nahrung zubereiten”
und in Block vier um die Aktivität ”Arbeit in einem Büro”. Die Probanden wurden
zunächst gefragt, welche Gegenstände sie aus einer Auswahl von 15 Gegenständen
benutzen würden, um die genannte Aktivität durchzuführen. Dabei standen folgende
15 Gegenstände zur Auswahl: Tisch, Kommode, Kühlschrank, Toilette, Sofa, Mikro-
welle, Kaffeemaschine, PC, Lampe, Waschbecken, Regal, Tafel/Whiteboard, Stuhl,
Bett und Waschmaschine. Anschließend wurden sie aufgefordert die gewählten Ge-
genstände entsprechend der Relevanz für die Aktivität zu ordnen.
3.3.2 Ergebnisse
An den Ergebnissen des ersten Blocks waren vor allem drei Erkenntnisse aus den
Antworten der Probanden abzulesen:
• Die Probanden waren überwiegend geneigt einzelne Möbelstücke einer Gruppe
zuzuordnen, anstatt diese als alleinstehend anzusehen. Vergrößerte Abstände
verringerten jedoch diese Tendenz.
243.3 Online-Studie: Aktivitätsregionen
• Je näher zwei Gegenstände beieinander standen desto größer war die Wahr-
scheinlichkeit, dass diese der gleichen Gruppe zugeordnet wurden.
• Mehrere beieinander stehende Möbelstücke wurden mit etwa gleichen Wahr-
scheinlichkeiten als eine große oder mehrere kleine Gruppen angesehen.
Die einzelnen Ergebnisse sind den Tabellen im Anhang A: Aktivitätsregionen-Studie
zu entnehmen.
Aus den Ergebnissen des zweiten Blocks lässt sich erkennen, dass die Probanden
mehrheitlich die Gegenstände Stuhl, Tisch und PC in der Nähe voneinander er-
warten. 71,7% der Probanden gaben an einen Tisch als ”sehr wahrscheinlich” neben
einem Stuhl zu erwarten. Umgedreht gaben 69,81% an einen Stuhl ”sehr wahrschein-
lich” neben einem Tisch vorzufinden. Für den PC gaben 58,49% an ihn ”sehr wahr-
scheinlich” in der Nähe eines Tisches zu finden und 51,89%, dass er sich in der Nähe
von einem Stuhl befindet. Andersherum erwarteten deutlich mehr Probanden noch
einen Stuhl (70,75%) und einen Tisch (66,98%) ”sehr wahrscheinlich” in der Nähe
eines PCs zu haben.
Des Weiteren wurden die Gegenstände Mikrowelle, Kühlschrank und Kaffeemaschi-
ne miteinander in Verbindung gebracht. Hier wurden aber jeweils geringere Wahr-
scheinlichkeiten angegeben. Neben einem Kühlschrank erwarteten als ”sehr wahr-
scheinlich” 22,64% der Probanden eine Mikrowelle und 26,42% eine Kaffeemaschi-
ne. Außerdem geben 27,36% an einen Kühlschrank und 29,25% an eine Mikrowelle
”sehr wahrscheinlich” in der Nähe einer Kaffeemaschine vorzufinden.
Für andere Gegenstände waren keine Präferenzen zu erkennen.
An den Ergebnissen des dritten Blocks lässt sich ablesen, dass am häufigsten die
Gegenstände Mikrowelle und Kaffeemaschine als Gegenstände für die Zubereitung
von Nahrungsmitteln angesehen wurden. Die ausgewählten Gegenstände wurden
gegen die Anzahl der Probanden, die diese Antwortmöglichkeit angeklickt hatten,
in Abbildung 3.4 dargestellt.
Als wichtigste Objekte für die Zubereitung von Nahrungsmitteln wurden die Mikro-
welle, der Kühlschrank und der Tisch angesehen. Die Mikrowelle war bei 47,57% der
Probanden, die diesen Gegenstand zuvor ausgewählt hatten, als wichtigster Gegen-
stand angesehen, der Kühlschrank bei 46% und der Tisch bei 41,3%. Die Kaffeema-
25Kapitel 3 Studien Abbildung 3.4: Ergebnisse der Fragestel- Abbildung 3.5: Ergebnisse der Fragestel- lung 1 aus Block 4. X-Achse: Zu Auswahl lung 2 aus Block 4. X-Achse: Zu Auswahl stehende Gegenstände, y-Achse: Anzahl der stehende Gegenstände, y-Achse: Anzahl der Probanden, die dieses Möbelstück ausge- Probanden, die dieses Möbelstück ausge- wählt haben, in Prozent. Häufigste Gegen- wählt haben, in Prozent. Häufigste Gegen- stände: Mikrowelle und Kaffeemaschine. stände: PC, Tisch und Stuhl. schine wurde obwohl im ersten Teil der Frage noch am zweithäufigsten angegeben, nur bei 14,77% als wichtigster Gegenstand angesehen. Für den vierten Block, der Arbeit im Büro, wurden deutlich mehr Gegenstände von den Probanden als relevant betrachtet. Vor allem wurden hier die Gegenstände PC, Stuhl und Tisch ausgewählt. In Abbildung 3.5 sind die Antworten der Probanden aufgetragen. Als wichtigster Gegenstand wurde hier der PC angesehen. Er wurde von 66,67% der Probanden, die ihn in der vorherigen Frage ausgewählt hatten, auch als wichtigster Gegenstand für die Arbeit im Büro angegeben. Für die Fragestellung F2: Wie sollte sich ein Serviceroboter für Menschen positionie- ren und bewegen? lassen sich nun folgende Schlüsse aus den Ergebnissen der Studie ziehen: Menschen fassen einzelne Möbelstücke häufig als Gruppen zusammen. Gemeinsam genutzte Gegenstände werden entsprechend als eine Aktivitätsregion angesehen. Au- ßerdem werden diesen Regionen im allgemeinen Funktionen zugeschrieben, die diese Regionen erfüllen. Für die Zubereitung von Nahrungsmitteln ließen sich klare Mö- belstücke benennen, denen diese Funktion zugeschrieben wird. Diese Möbelstücke werden in der Regel dann auch in der Nähe von einander erwartet. 26
3.4 VR-Studie
Für die Navigation eines Service-Roboters bedeutet das, dass dieser nicht den klaren
Zielort einer Person als einzelnen Gegenstand erkennen muss, sondern eine Akti-
vitätsregion lokalisieren kann, die der Mensch am wahrscheinlichsten als nächstes
benutzen wird. Auch können so feste Zuständigkeitsbereiche für Service-Roboter be-
stimmt werden, die nur bestimmte Aufgaben im Haushalt erfüllen. Diese Roboter
können Aktivitätsregionen mit anderen Funktionen meiden und sich auf die Regio-
nen konzentrieren, die ihren Aufgabenbereich abdecken.
3.4 VR-Studie
Um in einer realistischen Umgebung die Wahrnehmung von Menschen gegenüber
verschiedener Roboterverhaltensweisen zu untersuchen wurde eine VR-Studie durch-
geführt. Für diese Studie wurde das VR-System HTC VIVE [14] verwendet, um Pro-
banden verschiedene virtuelle Umgebungen zu zeigen. Die Umgebungen wurden aus
dem Facebook Replica Datensatz entnommen [34]. Innerhalb dieser Umgebungen
bewegten sich virtuelle Roboter um die Probanden herum. Die Probanden wurden
dazu aufgefordert laut zu denken und mitzuteilen, wie sie sich in der jeweiligen Situa-
tion fühlten. Am Ende der jeweiligen Trajektorie wurden den Probanden ergänzende
Fragen gestellt, wie wohl sie sich in den entsprechenden Situationen gefühlt haben.
Zusätzlich wurden Videoaufnahmen der Probanden während der Studie gemacht,
um deren körperliche Reaktionen auf die Roboter ebenfalls für die Auswertung mit
in Betracht zu ziehen.
Insgesamt nahmen 20 Probanden an der VR-Studie teil. Alle Probanden waren An-
gehörige der Rheinischen Friedrich-Wilhelms-Universität Bonn. Das Alter der Pro-
banden lag zwischen 18 und 35 Jahren.
3.4.1 Aufbau
Insgesamt wurden den Probanden drei verschiedene virtuelle Umgebungen und drei
verschiedene Robotermodelle gezeigt. Als Robotermodelle wurden der humanoide
Roboter Pepper und die beiden TurtleBot Modelle Waffle und 2i verwendet (vgl.
Abb 3.7).
27Kapitel 3 Studien
Turtlebot Waffle [29] Turtelbot 2i [24] Pepper [32]
Tabelle 3.7: In der VR-Studie verwendete Roboter.
Zu Beginn des jeweiligen Studiendurchlaufs wurde den Teilnehmern eine kurze Ein-
führung in das VR-System mit Hilfe einer Testumgebung gegeben. Anschließend
wurden sie darüber aufgeklärt, dass ihnen im Folgenden verschiedene virtuelle Um-
gebungen gezeigt würden, in denen sich ein virtueller Roboter um sie herumbewegt.
Die Probanden wurden zu Beginn der Studie darauf hingewiesen, dass sie sich in der
virtuellen Umgebung drehen und umsehen könnten, sich aber möglichst nicht von
der Stelle bewegen sollten. Jeder Übergang in die nächste Trajektorie und Umgebung
wurde vor der Durchführung angesagt.
In der ersten virtuellen Umgebung befanden sich die Probanden in einer Wohnküche,
mit Blick auf einen Flur und ein Büro im Nachbarzimmer. In dieser Umgebung
wurde Pepper als Roboter verwendet. Insgesamt wurden den Probanden hier vier
verschiedene Trajektorien gezeigt. Abbildung 3.6 zeigt diese Umgebung und die dort
verwendeten Robotertrajektorien.
Bei der zweiten Umgebung handelte es sich um ein Wohnzimmer mit einer großen
Sofalandschaft und geöffneter Tür zu einem weiteren Raum, der für den Menschen
von seiner Position aus jedoch nicht sichtbar war. In dieser Umgebung wurden die
beiden TurtleBots verwendet. In den ersten beiden Trajektorien wurde der Turtlebot
Waffle verwendet und in der dritten Trajektorie der Turtlebot 2i. Die Umgebung und
dort verwendeten Trajektorien sind in Abbildung 3.7 zu sehen.
Nach den jeweiligen Simulationen wurden die Probanden gefragt, wie sie die beiden
TurtleBots im Vergleich zu Pepper vorher wahrgenommen hatten und welches der
Modelle sie persönlich bevorzugen würden.
Bei der letzten virtuellen Umgebung handelte es sich um eine offene Wohnküche
mit Blick auf die Eingangstür und einer Treppe in ein weiteres Stockwerk. Andere
283.4 VR-Studie
Abbildung 3.6: Erste virtuelle Umgebung mit entsprechenden Trajektorien.
Roter Pfad = Trajektorie 1, gelber Pfad = Trajektorie 2, violetter Pfad = Trajektorie 3, grüner
Pfad = Trajektorie 4, in dieser Trajektorie teleportierte sich der Roboter, um ein unerwartetes
Auftreten des Roboters zu simulieren. Der hellrote Kreis markiert die Position des Probanden. In
allen Trajektorien wurde Pepper verwendet.
Räume waren für die Probanden nicht sichtbar. Für diese Trajektorien wurden die
Probanden informiert, dass sich der Roboter auf verschiedenen Wegen von der Tür
aus an ihnen vorbei auf einen Stuhl zu bewegen würde. Für diese Simulationen wurde
erneut Pepper verwendet. Abbildung 3.8 zeigt die Umgebung und die dazugehörigen
Trajektorien.
Im Anschluss an diese Simulationen wurden die Probanden gebeten zu bewerten,
welche Trajektorie für sie jeweils am angenehmsten und unangenehmsten war und
ihre Entscheidung zu begründen.
3.4.2 Ergebnisse
Eine der Haupterkenntnisse der Studie war, dass die Abwesenheit von Ton in den
Simulationen für die Probanden unangenehm war. Viele Teilnehmer beklagten, dass
sie den Roboter nicht orten könnten, da er keine Geräusche von sich gab. Aus diesem
Grund suchten auch viele Probanden den Roboter zunächst, wenn eine neue Tra-
jektorie gestartet wurde. Im späteren Verlauf der Studie wurde sich entsprechend
29Kapitel 3 Studien Abbildung 3.7: Zweite virtuelle Umgebung mit entsprechenden Trajektorien. Roter Pfad = Trajektorie 1, gelber Pfad = Trajektorie 2, violetter Pfad = Trajektorie 3. Der hellrote Kreis markiert die Position des Probanden. Für die ersten zwei Trajektorien wurde der Turtlebot Waffle verwendet, in der dritten Trjaektorie wurde der Turtlebot 2i verwendet. dazu entschlossen den Probanden mitzuteilen, wo der Roboter sich zu Beginn seiner Bewegung befand. Nachdem zu dieser Durchführung übergegangen wurde, wurde auch die Abwesenheit von Ton von Seiten der Probanden weniger beklagt. In der ersten Umgebung zeigte sich bei einigen Probanden, dass der Roboter ihnen, besonders in der 1. Trajektorie, zu nah kam. Zum Teil wurde das Unwohlsein von den Probanden direkt verbal geäußert, bei anderen Probanden war ein Ausweichen zur Seite zu beobachten. Die 2. und 3. Trajektorie waren sehr unauffällig und wurde von den Probanden überwiegend als neutral aufgefasst. Zwei Probanden beklagten hier nicht zu wissen, was der Roboter gerade für Ziele hat und welche Aufgaben dieser erfüllen sollte. Die 4. Trajektorie wurde von allen Probanden als unangenehm wahrgenommen, da der Roboter unerwartet hinter ihnen auftauchte. Auch hier wur- de die Abwesenheit von Geräuschen erneut als negativ wahrgenommen. Der Roboter Pepper, der in dieser Umgebung verwendet wurde, wurde sehr unter- schiedlich von den Probanden wahrgenommen. Zwei Probanden nahmen den Robo- ter als sehr unangenehm wahr, weil ihnen das anthropomorphe Design des Roboters 30
3.4 VR-Studie
Abbildung 3.8: Dritte virtuelle Umgebung mit entsprechenden Trajektorien.
Roter Pfad = Trajektorie 1, gelber Pfad = Trajektorie 2, violetter Pfad = Trajektorie 3. Der hellrote
Kreis markiert die Position des Probanden. Bei allen Trajekorien wurde Pepper verwendet.
nicht zusagte. Ein anderer Proband wiederum empfand Pepper genau aus diesem
Grund als sehr angenehm. Von einem weiteren Probanden wurde die Größe des
Roboters als sehr positiv wahrgenommen.
In der zweiten Umgebung wurden die ersten beiden Trajektorien von den meisten
Probanden neutral wahrgenommen. Auch hier wurde jedoch kritisiert, dass die Mo-
tive des Roboters nicht nachvollziehbar waren.
Die 3. Trajektorie wurde von allen Probanden als unangenehm wahrgenommen, da
der Roboter ihnen sehr nah kam und sie befürchteten, dass der Roboter ihnen über
die Füße fahren könnte oder sie ihn beim Laufen übersehen und stolpern würden.
Die Turtlebots wurden insgesamt als weniger geeignet für den eigenen Haushalt
wahrgenommen, da sie sehr klein und leicht übersehbar seien. Nur die zwei Pro-
banden, die mit dem menschenähnlichen Aussehen von Pepper unzufrieden waren,
bevorzugten die Turtlebots.
Für die dritte Umgebung wurden die Probanden explizit gefragt, welche der drei
Trajektorien sie jeweils am angenehmsten und am unangenehmsten fanden. Die Er-
gebnisse dieser Befragung sind in Tabelle 3.8 angegeben.
Zusätzlich gab einer der Probanden an, dass er mit allen Trajektorien zufrieden wäre
und keine Präferenzen angeben möchte.
31Sie können auch lesen