Virtueller Test automatisierter Fahrfunktionen - Bertrandt
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

TITELTHEMA Automatisiertes Fahren Virtueller Test automatisierter Fahrfunktionen Die zunehmende Komplexität und Variantenvielfalt automatisierter Fahrfunktionen lässt sich durch eine rein anforderungsbasierte Testmethodik nicht mehr zuverlässig beherrschen. Im Kontext der Plattform für hochautomatisiertes Fahren HARRI ent wickelt Bertrandt Methoden und Tools für den szenarienbasierten Test der zugehörigen Funktionen und Elektronik weiter. 16

AUTOREN
Dr.-Ing. Torsten Butz
ist Abteilungsleiter Elektronik-
Entwicklung Fahrwerk, Antrieb und
Automatisiertes Fahren bei
Bertrandt in Ingolstadt.
Dipl.-Wirt.-Ing. (FH)
Simon Paleduhn
ist Teamleiter Systementwicklung
und Testmanagement bei Bertrandt
in Ingolstadt.
Dipl.-Ing. (FH) Alexander Merkel
ist Abteilungsleiter Elektronik-
Entwicklung Diagnose, Komfort,
ADAS und Powertrain bei Bertrandt
in Ehningen.
Dipl.-Ing. (FH)
Christian Bohner, MBA
ist Teamleiter Virtueller Test
bei Bertrandt in Ingolstadt.
MOTIVATION
Zur Verbesserung der Verkehrssicherheit
und stetigen Automation des Straßenver-
kehrs finden vermehrt Fahrerassistenz-
systeme und automatisierte Fahrfunktio-
nen Einsatz. Die steigende Komplexität
der zugrundeliegenden Elektronik- und
Softwarekomponenten, agile Entwick-
lungsmethoden sowie die Reduzierung
von Erprobungsfahrzeugen erhöhen auch
die Anforderungen an geeignete Absiche-
rungsmethoden [1, 2]. Herkömmliche
© Bertrandt
Testverfahren nach anforderungsbasier-
tem Ansatz allein sind nicht mehr aus-
reichend, um in immer kürzer werden
ATZ 05|2020 122. Jahrgang 17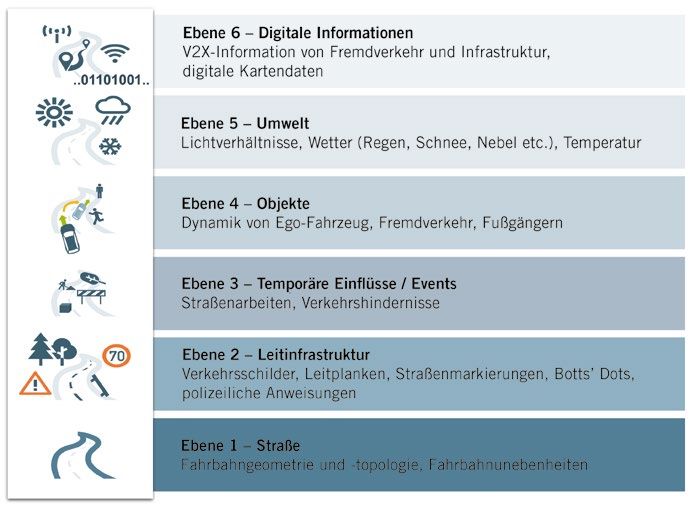
TITELTHEMA Automatisiertes Fahren den Entwicklungszyklen die Abdeckung aller notwendigen Absicherungsaspekte hinsichtlich Funktion, Robustheit und Sicherheit zu erreichen. Eine szenarien- basierte Testmethodik und eine konse- quente Virtualisierung ermöglichen die funktionsunabhängige Darstellung der Testbedingungen und eine Verschieb barkeit von konkreten Testaufwänden in Richtung virtueller Testorte. TESTMETHODIK Die weiterentwickelte szenarienbasierte Testmethodik, BILD 1, ist eine Ableitung aus den Forschungsergebnissen des BMWi-geförderten Projekts Pegasus [3] und den normativen Standards der Safety BILD 1 Szenarienbasierte Testmethodik (© Bertrandt) of the Intended Functionality [4]. Wesent- licher Bestandteil sind funktionale Test- szenarien, die über eine abstrakte sprach- liche Beschreibung definiert sind. Ihre Parametrierung erfolgt über statische Informationen, wie Straßengeometrien und Wetterbedingungen, sowie dyna mische Informationen, wie Manöver beschreibungen von Ego-Fahrzeug und anderen Verkehrsteilnehmern. Durch die Übersetzung in das universelle Format OpenScenario [5] und die Festlegung der infrage kommenden Parameterräume entstehen logische Szenarien, die eine Tool-unabhängige Verwendbarkeit sowie eine Portierbarkeit zwischen den Test orten gewährleisten sollen. Die Ablage erfolgt in einer Szenariendatenbank, die einen funktionsunabhängigen Szenarien katalog darstellt. Basierend auf einer Kritikalitätsbewer- tung wählt eine automatisierte Teststeue- rung die für den jeweiligen Testfokus relevanten logischen Szenarien aus und BILD 2 Sechs-Ebenen-Modell gemäß Pegasus (© Bertrandt) erzeugt konkrete Szenarien durch Bele- gung der Parameterräume mit eindeuti- gen Werten. Nach Ableitung der konkre- ten Testfälle wird eine Zuordnung auf SZENARIENMODELLIERUNG Modell gemäß Pegasus verwendet [6], virtuelle Testinstanzen, wie Model-, UND -BEWERTUNG das sich aus den Ebenen Straße, Leit Software- und Hardware-in-the-Loop- infrastruktur, temporäre Einflüsse, zum Umgebungen (MiL, SiL, HiL) oder phy Die Qualität der Testergebnisse wird Beispiel Baustellen, Dynamik von Ego- sische Tests im Fahrzeug vorgenommen. maßgeblich dadurch bestimmt, dass Fahrzeug und weiteren Verkehrsteilneh- Im Anschluss an die Testdurchführung die Szenarien den relevanten Testfall- mern, Umweltbedingungen sowie digi- werden die abgedeckten Testfall- bezie- raum abdecken und auf validen Daten tale Informationen (Car2X) zusammen- hungsweise Parameterräume bewertet basieren, die der Realität auf der Straße setzt, BILD 2. Die Informationen aus den und ihre Kritikalität verifiziert. Die Test- gerecht werden. Grundlage dafür sind unterschiedlichen Ebenen können im ergebnisse werden in der Ergebnisdaten- generische Manöver aus dem alltäglichen Wesentlichen beliebig miteinander kom- bank abgelegt und über eine Testnach- Straßenverkehr, aber auch kritische Situ- biniert werden, um eine breite Variation steuerung werden gegebenenfalls weitere ationen, die durch Auswertung von Feld- von Testszenarien zu erhalten. konkrete Szenarien erzeugt, um iterativ daten oder Unfalldatenbanken identifiziert Aufgrund der Vielzahl möglicher Sze- die Abdeckung aller wichtigen Bereiche werden. Zum strukturellen Aufbau der narien und Parametervariationen würde des Testfallraums sicherzustellen. Testszenarien wird ein Sechs-Ebenen- eine Absicherung des vollständigen Test- 18
fallraums exponentiell hohe Aufwände die verwendete Toolkette, BILD 4, voll- ven Bestandteile der virtuellen Toolkette
verursachen, die vor dem Hintergrund ständig zu virtualisieren und durch vollständig in die Cloud integrieren. Im
immer höherer Releasefrequenzen von Transfer der Testdurchführung in die Wesentlichen handelt es sich dabei um
Softwarelieferungen ausgeschlossen Cloud eine Parallelisierung sowie Simu- die Umgebungssimulation, die Simula-
sind. Um die Testdurchführung auf lationsgeschwindigkeiten schneller als tion des virtuellen Steuergeräts (vECU)
relevante konkrete Szenarien zu be Echtzeit zu erreichen. sowie die übergeordnete Testautomati-
schränken, ist eine Kritikalitätsbewer- Während die zuvor skizzierten Tools sierung. Dabei deckt die Umgebungs
tung erforderlich, die die Auswahl und für Szenariendatenbank, Szenarienkon- simulation neben der Dynamik des
Wertebelegung der verfügbaren Parame- kretisierung, Ergebnisdatenbank und Ego-Fahrzeugs auch die virtuelle Ver-
ter auf den für die zu testende Funktion Testnachsteuerung auf dem Client-PC kehrsumgebung sowie Modelle für die
interessanten Parameterbereich fokus- laufen, lassen sich die rechenzeitintensi- Umfeldsensorik ab, wie Kamera, Lidar
siert. Dabei kommen sowohl prädiktive
Verfahren zum Einsatz, die keine Test-
durchführung bedingen, wie auch Ana-
lysen, die im Rahmen der Testnachsteue-
rung den Parameterbereich justieren.
Kritikalitätsmetriken wie Time-to-Colli-
sion, Time-to-Brake oder Distance-of-
Closest-Encounter [7] können für jedes
Szenario gesondert definiert und in der
Szenariendatenbank abgelegt werden.
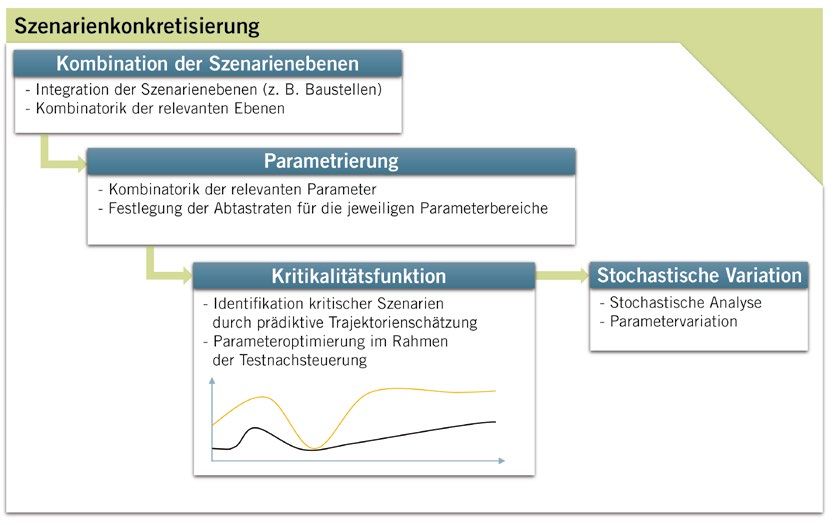
Zur Konkretisierung der Testszenarien
wurde ein Softwaremodul entwickelt,
BILD 3. Für die initiale Szenarienerstel-
lung wird die Manöverbeschreibung für
die dynamischen Verkehrsteilnehmer mit
statischen Informationen aus den anderen
Leveln des Sechs-Ebenen-Modells über
lagert. Im zweiten Schritt werden die
Szenarienparameter miteinander kombi-
niert und über eine Wahrscheinlichkeits-
verteilung die Abtastraten für die jewei
ligen Parameterbereiche festgelegt. Auf
Basis der prädiktiven Kritikalitätsbewer-
tung werden die relevanten, kritischen
Szenarien identifiziert und damit der Test
der Systemgrenzen fokussiert. Abschlie-
ßend sorgt eine stochastische Variation
der S
zenarienparameter dafür, dass im
Test auch zufällige Streuungen und Ab
weichungen berücksichtigt werden, die
im realen Straßenverkehr unvermeidlich
sind. Im Rahmen der Testnachsteuerung
führt eine Kritikalitätsbewertung bereits
getesteter Szenarien zu einer Optimie-
rung der dynamischen und statischen
Szenarienparameter abhängig davon,
wie zuverlässig sich die Prädiktion der
Szenarienkritikalität erweist.
VIRTUELLE TESTTOOLKETTE
Trotz Begrenzung der Absicherung auf
die als relevant identifizierten Szenarien,
ist eine Teststrategie unerlässlich, die die
Testumfänge im Fahrzeug sowie – auf-
grund des Rechenzeitbedarfs für die
Echtzeitsimulation – in SiL- und HiL-
Umgebungen auf das notwendige Mini-
mum reduziert. Vielmehr ist es das Ziel,
ATZ 05|2020 122. Jahrgang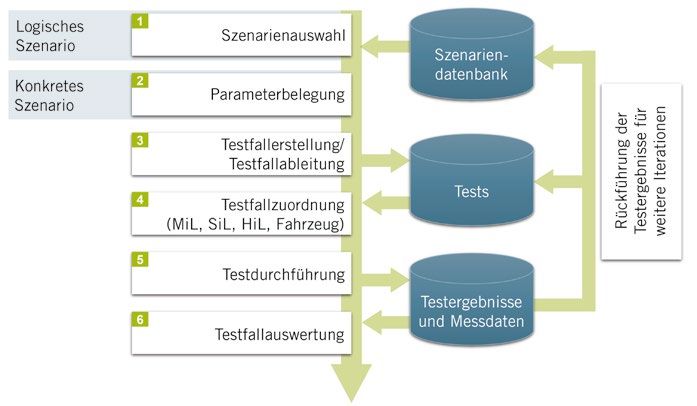
TITELTHEMA Automatisiertes Fahren
BILD 3 Modul zur Szenarien
konkretisierung (© Bertrandt)
oder Radar, die Informationen über tion der Testszenarien an und nimmt ASM, VEOS und System Desk von dSpace
den Fremdverkehr in Form von Punkte- nach Ende der Testfalldurchführung die Anwendung, zum anderen eine hetero-
wolken, Target- oder Objektlisten zur szenarienspezifische Auswertung vor. gene Kombination von IPG CarMaker
Verfügung stellen. Die zu testende Funk- Im Hinblick auf Leistungsumfang und und QTronic Silver. Als Testautomatisie-
tion wird über ein vECU-Tool integriert, Wartbarkeit der eingesetzten Tools wur- rung kommt in beiden Fällen ECU-Test
das die Erzeugung und Einbindung von den für die maßgeblichen Komponenten von TraceTronic zum Einsatz.
einzelnen Regelalgorithmen oder Soft- der virtuellen Testtoolkette ausschließlich Für die Bereitstellung in die Cloud gibt
warekomponenten bis hin zu vollstän kommerzielle Produkte eingesetzt. Exem- es mehrere Optionen. Sofern die verwen-
digen Steuergerätearchitekturen mit plarisch wurden zwei Varianten imple- deten Tools die Nutzung von Docker-Con-
zugehöriger Bussimulation gestattet. mentiert, die sowohl die Pegasus-Metho- tainern unterstützen, ist die Portierung der
Die programmtechnische Anbindung dik wie auch perspektivisch OpenScena- PC- in die Cloud-Umgebung relativ einfach
des vECU-Codes erfolgt häufig über ein rio bestmöglich unterstützen. Zum einen zu realisieren. Alternativ ist der Betrieb der
Functional Mock-up Interface (FMI). Die findet eine homogene Toolkette bestehend Toolkette in einer virtuellen Maschine
Testautomatisierung steuert die Simula- aus den Simulations- und vECU-Tools möglich, bei der zusätzlich das Betriebs-
BILD 4 Virtuelle
Testtoolkette
(© Bertrandt)
20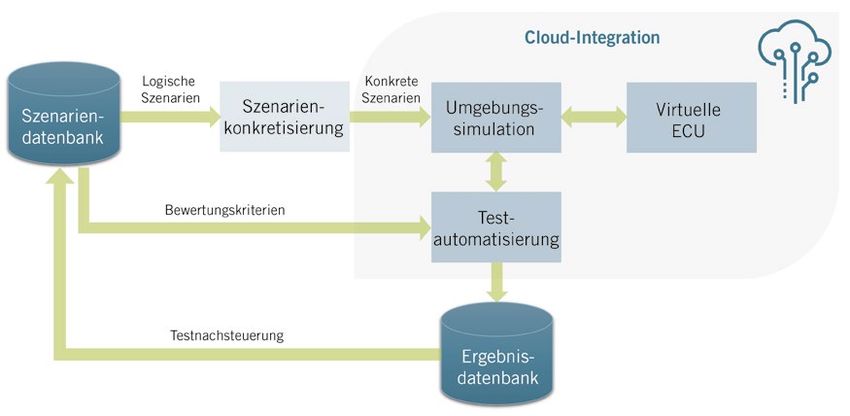
system sowie CPU-, GPU- und Speicher bung kann dabei auch zur Generierung LITERATURHINWEISE
ressourcen emuliert werden müssen. In von Steuergrößen für Fahrroboter aus [1] Linz, T.: Testen in Scrum-Projekten. Leitfaden für
Softwarequalität in der agilen Welt: Aus- und Weiter
beiden Fällen lassen sich die virtuellen dem Fahrzeugtest verwendet werden. bildung zum ISTQB Certified Agile Tester – Founda
Toolketten nahezu beliebig v ervielfachen Die bisherigen Ergebnisse zeigen, tion Extension. Heidelberg: dpunkt.verlag, 2017
und die Testdurchführung aufgrund der dass die szenarienbasierte Testmethodik [2] Maurer, M.; Gerdes, J. C.; Lenz, B.; Winner, H.
(Hrsg.): Autonomes Fahren: Technische, rechtliche
Skalierbarkeit der Rechenressourcen in gegenüber dem herkömmlichen anforde- und gesellschaftliche Aspekte. Berlin/Heidelberg:
der Cloud parallelisieren. rungsbasierten Test eine höhere Robust- Springer, 2015
[3] N. N.: Forschungsprojekt Pegasus. Online:
heit hinsichtlich Änderungen in der
https://www.pegasusprojekt.de/de/about-PEGASUS,
Anforderungslage und dem Entwick- aufgerufen am 31.01.2020
ERGEBNISSE
lungsprozess aufweist. Trotz der Wieder- [4] International Organization for Standardization:
ISO/PAS 21448:2019 Road vehicles – Safety of the
Im Kontext der von Bertrandt entwickel- verwendbarkeit der generischen Testsze-
intended functionality, Genf, 2019
ten Plattform für hochautomatisiertes narien und der effizienten Auswertung [5] ASAM e. V.: OpenScenario. Online: https://www.
Fahren HARRI [8] wurde die beschrie- der Testergebnisse sind Aufwand und asam.net/standards/detail/openscenario, aufgerufen
am 31.01.2020
bene virtuelle Testtoolkette eingesetzt, Testumfang zum Nachweis von korrekter
[6] N. N.: Pegasus Scenario Database. Online:
um autonome Park- und Rangierfunktio- Funktionalität und Sicherheit automati- https://www.pegasusprojekt.de/files/tmpl/Pegasus-
nen zu testen. Daneben wurde ein Proof- sierter Fahrfunktionen jedoch erheblich. Abschlussveranstaltung/15_Scenario-Database.pdf,
aufgerufen am 31.01.2020
of-Concept für den Test einer Fahrerassis- Mit zunehmender Komplexität der Funk- [7] Junietz, P.; Schneider, J.; Winner, H.: Metrik zur
tenzfunktion zur Fahrzeuglängsführung tion ist dies nur durch Reduktion der Bewertung der Kritikalität von Verkehrssituationen
auf Autobahnen durchgeführt. Die erstell- Testszenarien auf Basis einer Kritikalitäts- und -szenarien. 11. Uni-DAS e. V. Workshop Fah
rerassistenz und automatisiertes Fahren, Walting,
ten generischen Szenarienkataloge sind bewertung sowie durch konsequente Vir- 29.-31.03.2017
ebenso für Funktionen höherer Autono- tualisierung machbar. Gegenstand aktuel- [8] Schiekofer, P.; Erdogan, Y.; Schindler, S.;
miestufen nutzbar. Im Rahmen von Kun- ler Untersuchungen sind Messbarkeit und Wendl, M.: Maschinelles Lernen für das automati
sierte Fahren. In: ATZ 121 (2019), Nr. 12, S. 48-51
denprojekten finden die Ergebnisse unter Nachweis der Abdeckung aller infrage
anderem Eingang in den Test voraus- kommenden Testszenarien sowie die
READ THE ENGLISH E-MAGAZINE
schauender Sicherheitsfunktionen. Die Erweiterung der Testfallerstellung und Test now for 30 days free of charge:
Testort-unabhängige Szenarienbeschrei- -auswertung um zusätzliche Intelligenz. www.atz-worldwide.comSie können auch lesen