CLOUD MALL BW - TRANSFERDOKUMENTATION "ROBOSMARTDATA"
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 1
Cloud Mall Baden-Württemberg
TRANSFERDOKUMENTATION FÜR DEN PRAXISPILOTEN
„ROBOSMARTDATA“
Cloud-basierte Robotik-Dienstleistungen durch digitales Terminalmanagement-System
Öffentliche Version vom 26. Juni 2021
Beteiligte Partner
ADLATUS Robotics GmbH
Amorph Systems GmbH
Bwcon research gGmbH
Autoren
Matthias Strobel (CEO, ADLATUS Robotics GmbH)
Dr. Siegfried Hochdorfer (CTO, ADLATUS Robotics GmbH)
Silke Frauenhoffer (CFO, Amorph Systems GmbH)
Andreas Hofmann (Business Development Director AERO Solutions, Amorph Systems GmbH)
Dominik Stricker (bwcon research gGmbH)
Lizenz
Das Werk „TRANSFERDOKUMENTATION FÜR DEN PRAXISPILOTEN „ROBOSMARTDATA“
steht unter der Lizenz Creative Commons Namensnennung – Nicht-kommerziell – Keine
Bearbeitung 4.0 (CC BY-NC-ND 4.0).
Details zur Lizenz: https://creativecommons.org/licenses/by-nc-nd/4.0/.
Cover-Foto
© ADLATUS Robotics GmbH
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 2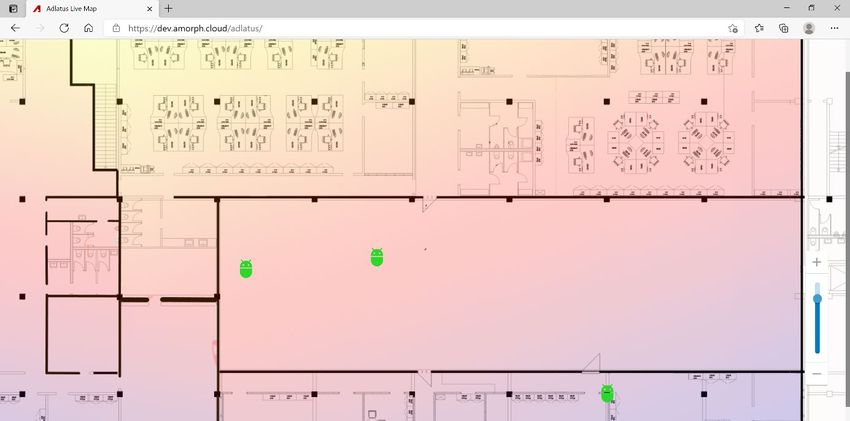
Inhalt
1 Management Summary ................................................................................................................... 4
2 Einführung ....................................................................................................................................... 5
2.1 Ausgangssituation und Motivation auf der Makroebene ....................................................... 5
2.2 Ziele des Praxispiloten und Nutzen für die Zielgruppen ......................................................... 5
3 Projektrahmen................................................................................................................................. 6
3.1 Konsortium und Rollen ............................................................................................................ 6
3.2 Notwendige Ressourcen sowie Kompetenzen ........................................................................ 7
4 Lösungsbeschreibung ...................................................................................................................... 8
4.1 Anforderungen und Teillösungen ............................................................................................ 8
4.1.1 Terminalmanagement-System ........................................................................................ 8
4.1.2 Roboter ............................................................................................................................ 9
4.2 Praxispilot-Konzept.................................................................................................................. 9
4.3 Cloud-Architektur .................................................................................................................. 10
4.4 Geschäftsmodelle .................................................................................................................. 12
4.5 Herausforderungen bei der Umsetzung ................................................................................ 14
4.5.1 Organisatorische Herausforderungen ........................................................................... 14
4.5.2 Technische Herausforderungen .................................................................................... 14
4.6 Prototyp ................................................................................................................................. 14
4.7 Erfahrungen von Endanwendern .......................................................................................... 16
5 Integration und Kooperation zwischen den beteiligten Unternehmen ........................................ 17
5.1 Organisatorisches .................................................................................................................. 17
5.2 Technisches ........................................................................................................................... 18
5.3 Strategisches ......................................................................................................................... 18
5.4 Rechtliches ............................................................................................................................ 19
6 Resümee ........................................................................................................................................ 20
6.1 Rolle der Cloud ...................................................................................................................... 20
6.2 Lessons Learned .................................................................................................................... 20
6.3 Ausblick.................................................................................................................................. 20
7 CMBW-Projektdarstellung............................................................................................................. 22
8 Kontakt .......................................................................................................................................... 23
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 3
1 Management Summary Praxispiloten innerhalb des Förderprojekts Cloud Mall Baden-Württemberg (Cloud Mall BW) sind kleine Projekte zwischen mehreren Unternehmen und Cloud Mall BW-Projektpartnern, die zusammen Cloud-Services entwickeln und somit ein gemeinsames Ziel verfolgen. Das Potenzial mobiler Serviceroboter zur Erfassung von Sensordaten als Grundlage für Mehrwert- dienste im Bereich von Smart Cities und Industrie 4.0 soll in diesem Pilotprojektvorhaben exemplarisch für die Zielumgebung Flughafen erprobt werden. Über ihre originäre Aufgabe hinaus können sie zur Erfassung von Sensordaten genutzt werden, die eine wesentliche Rolle zur Entwicklung innovativer und intelligenter Dienstleistungen spielen. Der vorliegende Praxispilot wurde durch die kooperierenden Unternehmen ADLATUS Robotics GmbH und Amorph Systems GmbH (AMORPH) durchgeführt. Während ADLATUS die mit Sensoren ausgestat- teten Serviceroboter herstellte und ins Projekt miteinbrachte, verfügte AMORPH über das Terminal- management-System, das bereits in der Praxis an diversen Flughäfen zum Einsatz kommt. Der Schwerpunkt des Praxispiloten lag in der Anbindung eines ADLATUS Serviceroboters an das Termi- nalmanagement-System AMORPH.aero durch eine Übertragungsschnittstelle (Application Program- ming Interface, Abk.: API) zwischen den Sensoren des Roboters und der Cloud-Infrastruktur von AMORPH. So konnten die Daten im Terminalmanagement-System verarbeitet werden. Um die Mehr- wertdienste anhand eines Beispiels zu demonstrieren, wurde eine WLAN-Heatmap erstellt. „Eine He- atmap (heat = Hitze; map = Karte) ist ein Diagramm zur Visualisierung von Daten. Heatmaps dienen dazu, große Datenmengen schnell überblicken zu können, indem Zahlenwerte je nach Größe farblich markiert werden.“ 1. Dazu zeichnete der mit Sensoren ausgestattete Reinigungsroboter in einer Test- umgebung die WLAN-Signalstärken auf und übermittelte diese korrelierend mit den Positionsdaten an die Cloud von AMORPH. Anhand des im Terminalmanagement-System integrierten Gebäudeplans konnte dann eine Heatmap der WLAN-Signalstärken produziert werden. Resultierend ließen sich hier nun Handlungsempfehlungen und Entscheidungshilfen ableiten. So könnten beispielsweise mögliche kurzfristige Störungen direkt identifiziert und behoben werden. Längerfristig erlaubt diese Vorarbeit die Erkennung von Bereichen mit konstant geringer WLAN-Signalstärke und leistet damit einen Indika- tor für den Bedarf eines möglichen Ausbaus der WLAN-Signale in relevanten Bereichen. Bereits während der Entwicklung des Praxispiloten wurden potentielle Endanwender hinsichtlich des Bedarfs solcher innovativer Lösungen angesprochen. Die Resonanz war positiv. Einerseits wurde iden- tifiziert, welche Stakeholder in dieser neu generierten Wertschöpfungskette inkludiert werden müs- sen. Andererseits wurden die Relevanz und der Bedarf der denkbaren Mehrwertdienste, die auf Basis dieses Praxispiloten weiterentwickelt werden konnten, bestätigt. 1 Vgl.: https://de.ryte.com/wiki/Heatmap (Stand: 26.3.2021) Cloud Mall BW – Transferdokumentation „RoboSmartData“ 4
2 Einführung
2.1 Ausgangssituation und Motivation auf der Makroebene
In großflächigen (Gewerbe-)Objekten und komplexen Gebäuden wie Flughäfen gilt nach wie vor, dass
die Augen und Ohren der Mitarbeiter und Kunden eine wichtige Informationsquelle für das Facility-
Management der Gebäude darstellen. Es fehlen automatisierte und intelligente Services, die Fehlfunk-
tionen, Verunreinigungen oder Schäden automatisiert erfassen und bei deren Behebung unterstützen
können. Insbesondere durch die Corona-Pandemie entstehen für Betreiber der genannten Anwen-
dungsfelder neue Herausforderungen, um Hygienestandards einhalten zu können.
Das Potenzial mobiler Serviceroboter zur Erfassung von Sensordaten als Grundlage für Mehrwert-
dienste im Bereich von Smart Cities und Industrie 4.0 soll in diesem Pilotprojektvorhaben exemplarisch
für die Zielumgebung Flughafen erprobt werden.
Reinigungsroboter sind zur Ausführung ihrer originären Reinigungsaufgabenstellung innerhalb eines
Gewerbeobjektes ein oder mehrmals täglich flächendeckend im Einsatz. Dies bietet eine ideale Aus-
gangsbasis für die Erschließung eines bisher nicht gehobenen Potenzials: Die zyklische, flächen-de-
ckende Erfassung von Sensordaten und Übertragung derer in eine (Mobile Edge) Cloud zur Dokumen-
tation, Speicherung als Datensee und Weiterverarbeitung mit und in dem Terminalmanagement-
System des Flughafens.
2.2 Ziele des Praxispiloten und Nutzen für die Zielgruppen
Im Rahmen des Praxispiloten wurde der Datenaustausch zwischen den Reinigungsrobotern von ADLA-
TUS und dem Terminal-Managementsystem AMORPH.aero von AMORPH konzeptioniert und erprobt.
Damit wurde die Grundlage geschaffen, um Cloud-basierte Services zu entwickeln sowie die Lösungs-
möglichkeiten für die oben genannten Herausforderungen darstellen können. Als beispielhaftes Sze-
nario wurde die Erstellung einer Heatmap zur Visualisierung der WLAN-Abdeckung innerhalb einer Te-
stumgebung gewählt.
Der Endanwender, welcher hier der Flughafenbetreiber ist, erhält mittel- bis langfristig die Möglichkeit,
Informationen der Serviceroboter über ihre eigentliche Anwendung hinaus zu analysieren und für prä-
diktive Services zu nutzen (Predictive Maintenance, Predictive Analytics). Außerdem erhöhen die Zu-
standsinformationen die Transparenz über die operative Situation eines Gebäudes für schnellere und
effizientere Entscheidungen.
Die Ziele des Praxispiloten im Einzelnen lauten daher wie folgt:
Generierung zusätzlicher Daten zur Erweiterung der Funktionalitäten des Cloud-basierten Ter-
minal-Managementsystems AMORPH.aero.
(Teil-) automatisierte sowie effiziente Entscheidungsfindung und Behebung von Fehlfunktio-
nen, sowie perspektivisch Verunreinigungen oder Schäden, in Flughäfen.
Erweiterte Anwendungsmöglichkeiten durch Reinigungsroboter für Flughafenbetreiber und
Flughafendienstleister wie Predictive Maintenance und Predictive Analytics.
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 53 Projektrahmen 3.1 Konsortium und Rollen Das Projektkonsortium besteht aus zwei Unternehmen und einer außeruniversitären Forschungsein- richtung. Die ADLATUS Robotics GmbH ist ein im Jahr 2015 gegründetes Unternehmen (KMU), welches auto- nome Systeme (Serviceroboter) entwickelt, produziert und mit einem Partnernetzwerk vertreibt. AD- LATUS beschäftigt derzeit ca. 30 Mitarbeiter, der Hauptsitz von ADLATUS an welchem die Verwaltung, Entwicklung und Produktion ansässig sind, befindet sich in Ulm. Aktuelle Produkte sind autonom agie- rende Reinigungsroboter inkl. Servicestation sowie Transportroboter (Automated Guided Vehicle – AGV) für den innerbetrieblichen Einsatz. Demzufolge stellt ADLATUS die für dieses Vorhaben zentralen Serviceroboter und die damit zusam- menhängenden Dienstleistungen und den Betrieb des Roboters zur Verfügung. In diesen werden dann Sensoren zur Datenübertragung integriert. Durch die Nutzung einer vorhandenen Schnittstelle des Projektpartners AMORPH sorgt ADLATUS für die Implementierung einer sicheren Datenübertragung an das Terminalmanagement-System AMORPH.aero. Die Amorph Systems GmbH ist ein Informationstechnik-Unternehmen (KMU) mit Hauptsitz in Stutt- gart und weiteren Standorten (100%ige Tochterunternehmen) in Timisoara und Oradea, Rumänien. Das Unternehmen beschäftigt insgesamt ca. 40 Mitarbeiter an allen Standorten und verfügt über die Geschäftsbereiche IT-Services und IT-Lösungen für Flughäfen und Connectivity. Die eigen entwickelte IT-Lösung AMORPH.aero, ist eine Cloud-basierte digitale Plattform zur Planung des Flughafenbetriebs und für Echtzeitmanagement, die auf SaaS-Basis (Software-as-a-Service) verfügbar ist und über meh- rere Module für Anwendungsfälle im Zusammenhang mit dem Passagierfluss und der Verwaltung von Flughafenterminals verfügt (Terminal-Management Plattform). AMORPH.aero beinhaltet eine äußerst schnelle Simulation-Engine, die mit Algorithmen für maschinelles Lernen, KI und Cloud-Technologie ausgestattet ist, um Passagierströme und Betriebsressourcen auf einem Flughafen besser vorherzusa- gen, zu planen und zu verwalten. Im vorliegenden Projekt stellt AMORPH damit die Cloud-basierte Datenplattform zur Verfügung, auf der die Daten des Serviceroboters von ADLATUS übertragen werden. Dazu war AMORPH zur Daten- übertragung zwischen Roboter und Cloud an der Schnittstellenentwicklung beteiligt und kümmert sich um die sichere Datenübertragung der Sensordaten des Roboters inklusive Metainformationen in die Cloud. Durch die Kombination mit bestehenden Daten und Informationen zur Umgebung innerhalb eines Flughafengebäudes kann das Terminalmanagement-System somit erweiterte Funktionen anbie- ten. Als Projektkoordinator agierte das Cloud Mall BW-Konsortialmitglied bwcon research gGmbH. Die bwcon research gGmbH ist eine 100%ige Tochter der bwcon GmbH und der nicht-unternehmerische Teil innerhalb der bwcon Organisation. Zweck der bwcon research gGmbH ist die Förderung von Wis- senschaft und Forschung. Alle erzielten Ergebnisse werden uneingeschränkt und barrierefrei der All- gemeinheit zur Verfügung gestellt. Baden-Württemberg: Connected e. V. (bwcon) ist die führende Cloud Mall BW – Transferdokumentation „RoboSmartData“ 6
Wirtschaftsinitiative zur Förderung des Innovations- und Hightech-Standortes Baden-Württemberg.
Mehr als 4.600 Experten profitieren von der systematischen Vernetzung über die bwcon-Plattform.
bwcon ist eines der erfolgreichsten Technologienetzwerke in Europa und verbindet erfolgreich Unter-
nehmen und Forschungseinrichtungen.
Gemäß ihrer originären Mission verfolgt die bwcon auch im Rahmen dieses Piloten Forschungs- und
Erkenntnisgewinn im Bereich Cloud-basierter Dienstleistungen, Service-Robotik und Terminal-Ma-
nagement. Gleichzeitig fungiert die bwcon research gGmbH im Sinne des Netzwerkgedankens ihres
Vereinsdachs als Bindeglied zu möglichen Endanwendern der Lösung dieses Pilotkonzepts.
3.2 Notwendige Ressourcen sowie Kompetenzen
Zur Durchführung des Pilotvorhabens wurden diverse Ressourcen und Kompetenzen benötigt. Diese
lassen sich untergliedern in (1.) fachliche Kompetenz, (2.) Softwarekomponenten sowie (3.) Hardware-
komponenten.
Die fachlichen Kompetenzen werden im Abschnitt 5.1 dieser Transferdokumentation beschrieben.
Hardwarekomponenten:
ADLATUS Reinigungsroboter CR700, Logistikroboter LR200: Die mit Sensorik ausgestatteten
Serviceroboter dienen einerseits zur Erfüllung ihrer originären Aufgabe der Großflächenreini-
gung. Im Rahmen des Piloten lieferten sie vor allem relevante Daten zur Erfassung der WLAN-
Signalstärke und korrelierender Positionsdaten.
Softwarekomponenten:
AMORPH.aero Terminalmanagement-Plattform: Die Terminalmanagement-Plattform ist das
User-Interface im Pilotkonzept und liefert dem Flughafenpersonal notwendige Informationen
zur Entscheidungshilfe, Behebung oder Prävention von Mängeln.
Schnittstelle AMORPH.aero (REST-API 2): Über diese Schnittstelle kann ein bestimmter Roboter
mit der Cloud kommunizieren, indem er seine Position aktualisiert, wann immer dies erforder-
lich ist. Die Schnittstelle oder auch API (Application Programming Interface) ist mit der REST-
Technologie implementiert. REST ist eine Reihe von architektonischen Einschränkungen, kein
Protokoll oder ein Standard. API-Entwickler können REST auf verschiedene Arten implemen-
tieren. Für das Pilotvorhaben wird die API ausschließlich für die einseitige Datenübertragung
vom Roboter in die Cloud genutzt.
Cloud-Computing-Service (Microsoft Azure): Innerhalb der Cloud werden die Sensordaten der
Serviceroboter erfasst und nutzbar gemacht. Erst durch deren Infrastruktur (siehe auch Abbil-
dung 1) ist es möglich, statische Daten wie beispielsweise Gebäudepläne durch die Sensorda-
ten anzureichern und Korrelationen herzustellen.
2 https://de.wikipedia.org/wiki/Representational_State_Transfer
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 74 Lösungsbeschreibung
4.1 Anforderungen und Teillösungen
4.1.1 Terminalmanagement-System
Die Cloud-basierte AMORPH.aero-Terminalmanagement-Plattform verwendet Künstliche Intelligenz
und Machine Learning zur Optimierung des täglichen Terminalbetriebs eines Flughafens und bietet
leistungsstarke Funktionen für die Planung, Prognose und Verwaltung von Passagierströmen und Flug-
hafenressourcen. AMORPH.aero unterstützt ein proaktives statt eines reaktiven Managements von
Passagierströmen und Flughafenressourcen und ermöglicht Echtzeitvorhersagen. Während herkömm-
liche Messsysteme und CCTV (Videoüberwachung) es ermöglichen, große Warteschlangen und lange
Wartezeiten erst nach ihrem Auftreten zu identifizieren, hebt AMORPH.aero das Auftreten von Prob-
lemen hervor, bevor sie auftreten.
Selbst bei starker Beeinflussung durch COVID-19 und damit einhergehenden, schwankenden Passa-
gierzahlen, kann der Flow Planner von AMORPH mit einer Genauigkeit von 85+% Vorhersagen treffen.
Die vorhergesagten Werte werden anschließend vom System verwendet, um die Bewegung jedes Pas-
sagiers innerhalb des Flughafengebäudes zu simulieren. Dies führt zu einer vollständigen Ansicht der
überfüllten Bereiche und Warteschlangen für den gesamten Flughafen.
Durch zusätzliche Sensoren, wie z. B. durch Sensoren eines Reinigungsroboters, können weitere wert-
volle Daten gewonnen und im System verarbeitet und genutzt werden.
AMORPH.aero verwendet einen zentralen Cloud Computing-Service (Microsoft Azure). Dies bietet den
großen Vorteil, dass alle Reinigungsgeräte Daten mit der Cloud austauschen können.
Mit AMORPH.aero, das bereits an mehreren Flughäfen eingesetzt wird, ist es damit möglich, Reini-
gungs- und Desinfektionsaktivitäten anhand der Simulationsergebnisse Tage im Voraus zu planen.
Basierend auf den Informationen, die von jedem Reinigungsgerät empfangen werden, kann AMORPH
folgende Use Cases umsetzen:
Automatische Anpassung der Reinigungspläne an die aktualisierten Reinigungszyklen
Standortangabe der Reinigungsgeräte in Echtzeit (GPS / vorzugsweise Bewegungsdaten)
Echtzeitansichtanzeige der gereinigten Bereiche (GPS / vorzugsweise Bewegungsdaten)
Information an Personal über fehlerhafte Geräte
Überwachung der Status-Updates aller Geräte mit einem Dashboard
Unter Verwendung zusätzlicher Sensoren (wie z. B. Lidar 3) sind viele weitere Use Cases möglich, z. B.
die Bestimmung von Personendichte im Umfeld der Roboter.
3Lidar (Abkürzung für English Light detection and ranging, auch Light imaging, detection and ranging), und Ladar (Light
amplification by Stimulated Emission of Radiation detection and ranging), ist eine dem Radar verwandte Methode zur
optischen Abstands- und Geschwindigkeitsmessung sowie zur Fernmessung atmosphärischer Parameter.; Quelle: Wikipedia
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 84.1.2 Roboter
Die ADLATUS Robotics GmbH stellt bereits kommerziell Serviceroboter zur Reinigung industrieller Flä-
chen für diverse Anwendungsfelder zur Verfügung. In einigen Flughäfen sind bereits CR700 Reinigungs-
roboter zur Bodenreinigung im Einsatz. Bei der Ausführung der Reinigungsaufgaben fahren die Roboter
mehrmals täglich flächendeckend sehr große Bereiche des Flughafens ab.
Für die Realisierung der Use Cases müssen unterschiedliche Anforderungen an die Umgebung erfüllt
sein:
WLAN-Abdeckung im Arbeitsbereich der Roboter, dies setzt eine Internetverbindung voraus
Geeignete Bodenbeläge für die maschinelle Reinigung
Mögliche Use Cases sind folgende:
Akquise von Umgebungsdaten durch unterschiedliche Sensoren
Übermittlung der Sensordaten inkl. der Positionsdaten an die AMORPH.aero Cloud
4.2 Praxispilot-Konzept
AMORPH und ADLATUS Robotics haben im Pilotprojekt einen Use Case (siehe Abbildung 1) implemen-
tiert, in welchem auf einem autonomen Reinigungsroboter erzeugte Daten zyklisch in die Cloud über-
tragen, aufbereitet und für Dritte bereitgestellt werden.
Abbildung 1: Visualisierung Projektvorhaben
Konkret wurde vom Reinigungsroboter die WLAN-Signalstärke, der in einem modellhaft nachgebilde-
ten Flughafen vorhandenen Access-Points, flächendeckend erfasst und mit den Positionsdaten des Ro-
boters verknüpft. Der Roboter läuft über Laser-Sensorik völlig autark.
Da für den Piloten kurzfristig kein Endanwender gefunden werden konnte, wurde bei ADLATUS eine
Testfläche innerhalb der firmeneigenen Gebäude genutzt. Die Daten über die Signalstärke werden an
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 9die AMORPH.aero Cloud-Lösung übermittelt, welche auf dieser Basis eine Heatmap für die WLAN-Ab-
deckung im Gebäude erstellt. Die Heatmap bietet z. B. dem Betreiber des Flughafens eine live Darstel-
lung der Abdeckung der WLAN-Accesspoints.
Darüber hinaus sind auf Basis dieser Infrastruktur noch weitere Konzepte denkbar, die in Abschnitt 4.4
(Geschäftsmodelle), Abschnitt 5.3 (Strategisches) sowie im Ausblick in Abschnitt 6.3 behandelt wer-
den.
4.3 Cloud-Architektur
Die Cloud-Lösung AMORPH.aero basiert auf einer Microsoft Azure Cloud Instanz und nutzt dedizierte
Microsoft Office 365 Services wie automatische Zugriffs- und Authentifizierungsmöglichkeiten. Im Rah-
men der prototypischen Implementierung im Praxispiloten wird diese Instanz von AMORPH gehostet,
kann aber im Falle eines Rollouts als kundenspezifische Instanz ausgerollt oder direkt in der Microsoft
Azure Instanz des Kunden implementiert werden.
Im Folgenden werden die wesentlichen Darstellungen und Schnittstellen der Infrastruktur für das vor-
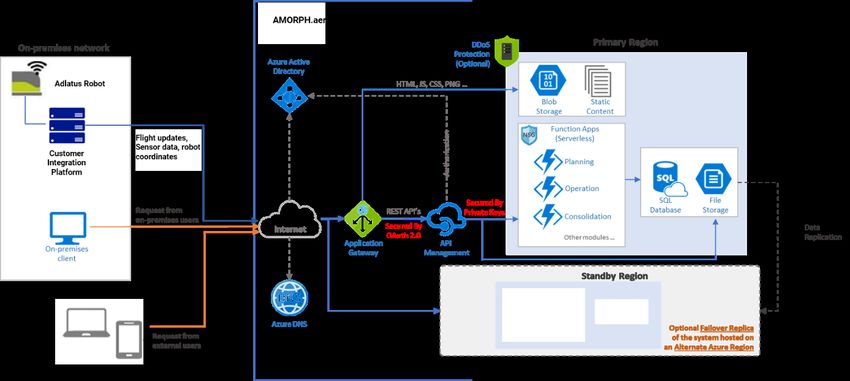
liegende Projekt beschrieben (siehe auch Abbildung 2):
1) Die Sensor- und Positionsdaten werden über eine Internetverbindung übertragen. Für eine
einfache Integration verwendet AMORPH.aero CLOUD den RESTful-API-Standard. Dies bietet
einen flexiblen und erweiterbaren Satz von APIs zum Übertragen von Roboterpositionsdaten
und zusätzlich Sensorinformationen, die von Roboter zu Roboter unterschiedlich sein können.
2) Die Daten vom Roboter werden auf Microsoft Azure gespeichert und profitieren von all den
sich ständig weiterentwickelnden Sicherheitsstandards. Skalierbare API und Datenbanken si-
chern, dass die APIs und die MSSQL-Datenbanken nicht überlasten und nicht ausfallen. Durch
die weltweite Nutzung der Azure-Server von Microsoft kann die Bereitstellung der Cloud-Lö-
sung in der Nähe des Zielorts gesichert und repliziert werden. Daten werden nicht nur aktua-
lisiert, sondern auch protokolliert, um verschiedene Diagramme und KPIs zu erstellen.
3) Über die zuvor definierte Schnittstelle können die Daten in den Applikationen des Terminal-
management-Systems AMORPH.aero abgerufen werden. AMORPH.aero verfügt über eine be-
nutzerfreundliche Oberfläche zum Verfolgen und Analysieren von Sensorinformationen. Be-
nutzeroberflächenelemente und Zugriff können je nach Benutzer, Rolle oder Gruppe
eingeschränkt werden. Der Authentifizierungszugriff auf die Benutzeroberfläche erfolgt über
Azure Active Directory mit integrierten Office- oder externen Benutzerkonten. Durch die
Azure-Skalierbarkeit wird sichergestellt, dass die Leistung unabhängig von der Anzahl der Be-
nutzer, die das System gleichzeitig verwenden, immer gleich ist.
4) Die Daten des Roboters und der zugrundeliegende Gebäudeplan können innerhalb der soge-
nannten Primary Region des Terminalmanagement-Systems korreliert werden. Daten vom Ro-
boter können für zusätzliche AMORPH.cloud Anwendungen verwendet und bereitgestellt wer-
den. Ein Beispiel für eine solche Verbesserung ist die Verwendung des Lastvorhersage- und
Simulationsmoduls zum Planen der aktiven Stunden des Roboters, wenn die PAX-Dichte in be-
stimmten stark frequentierten Zonen niedrig ist. Abhängig von vorhandenen Sensoren können
verschiedene Systeme wie Ansagelautstärke, Luftfeuchtigkeit, Lichtintensität, WLAN-Abde-
ckung überwacht werden.
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 104
2
1
3
2
Abbildung 2: Cloud-Architektur RoboSmartData
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 114.4 Geschäftsmodelle
Da beide Produkte, der Adlatus Reinigungsroboter sowie die AMORPH.aero Plattform, unabhängig
voneinander marktfähig sind, ergeben sich hierdurch unterschiedliche Geschäftsmodelle. Das ist ei-
nerseits das sogenannte Upselling bestehender Wertangebote:
Upselling von bereits existierenden Kunden des Adlatus Roboters, um durch den Einsatz mit
AMORPH.aero eine noch effizientere Ressourcendisposition durchzuführen.
Upselling von bereits existierenden Kunden von AMORPH.aero:
1. Zur Ergänzung einer passagierflussorientierten operativen Steuerung von Flughäfen
mit den Möglichkeiten zur Disposition von Reinigungspersonal und Robotern.
2. Angebot von prädiktiven Services durch Nutzung der Informationen der Servicerobo-
ter (Predictive Maintenance, Predictive Analytics).
Insgesamt wird die Steigerung der Attraktivität des Produktangebots beider Unternehmen damit er-
reicht.
Darüber hinaus sind auch neuartige Geschäftsmodelle denkbar, die im Folgenden kurz beschrieben
sind und im Business Model Canvas in Abbildung 3 den neun Feldern zugeordnet sind:
1. Eventgetriebene Reinigungsdienstleistung (Blau)
Geschäftsmodell auf Basis der geschaffenen Infrastruktur:
Auf Basis des Use Cases ist der Datenaustausch einseitig zwischen Roboter und Cloud. Durch Imple-
mentierung des sogenannten SMARTUNIFIER, der Connectivity-Lösung von AMORPH (anstelle der
REST API) ist es jedoch auch möglich aus der Cloud oder dem Terminalmanagement-System zum Ro-
boter zu kommunizieren. Dies ermöglicht eine eventgetriebene Robotersteuerung. Demzufolge wird
die Roboternutzung effizienter. Ein mögliches Einnahmenmodell wäre eine wiederkehrende Gebühr
zur Nutzung der Steuerung über das Terminalmanagement-System sowie ein Verleih des Roboters ba-
sierend auf der tatsächlichen Nutzung.
2. Prädiktive Warenbeschaffung im Flughafeneinzelhandel (Grün)
Geschäftsmodell mit erweitertem Service-Konzept zur Datennutzung:
Anhand der Datenübertragungstechnologie RFID-Kennung wäre es denkbar, dass Konsumgüter aus
dem Einzelhandel des Flughafens mit RFID-Chips versehen werden. Stattet man einen Serviceroboter
so aus, dass er diese Produkte verfolgen kann, so kann man einerseits die Produktströme nachvollzie-
hen und andererseits kann man sie demzufolge den Flügen zuordnen. Wenn sich dadurch Korrelatio-
nen von Produktnachfrage und Destinationen ergeben, könnte der Einzelhandel anhand dieser Daten
eine optimierte Warenbeschaffung vornehmen. Eine mögliche Einkünfte-Quelle wäre in diesem Fall
eine monatliche Gebühr für eine Software-as-a-Service Dienstleistung.
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 12Produktverfolgung zur Er-
fassung von Korrelationen Prädiktive
Flughafenbe- Einzelhandel
zwischen Konsumverhal- Warenbe-
treiber
ten und Fluglinien. schaffung Flughafen
Reini-
gung
Eventgetriebene Reinigungs-
Flughafenbetrei- Reinigungs- dienstleister
ber, IT-Systembe- dienstleistung Flughafen
RFID- AMORPH
treiber Flughafen .aero
Ken-
nung, Roboter,
Roboter WLAN
AMORPH.aero
Monatliche Gebühr Soft-
Monatliche Gebühr Soft- ware-as-a-Service, nut-
ware- as-a-Service zungsabhängige Roboter-
miete
Abbildung 3: Mögliche Geschäftsmodelle RoboSmartData
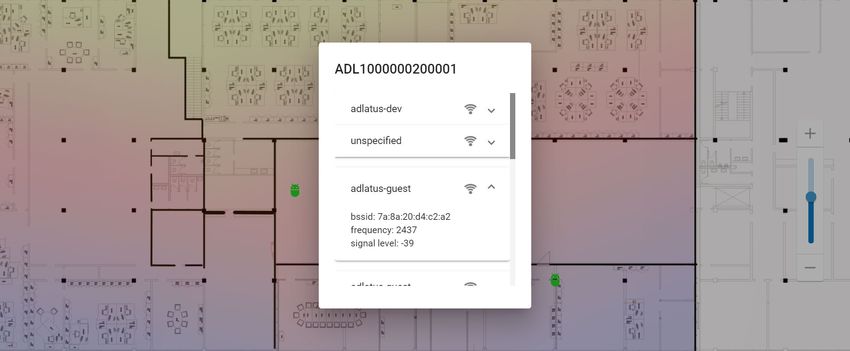
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 134.5 Herausforderungen bei der Umsetzung 4.5.1 Organisatorische Herausforderungen Während der Entwicklung des Piloten fanden bereits erste Gespräche mit Endanwendern statt. In die- sem Falle handelte es sich dabei ausschließlich um Ansprechpartner von Flughäfen. Dabei fiel auf, dass für ein derartiges Kooperationskonzept unterschiedliche Verantwortlichkeiten innerhalb eines Flugha- fens involviert werden müssen. Beispielsweise sind die Ansprechpartner für Angelegenheiten des Ter- minalmanagements oftmals direkt beim Flughafen betreibenden Unternehmen angestellt. Die Zustän- digkeiten für das Facility-Management und damit für die Entscheidungen zur Auswahl eines Service- roboters sind meist ausgelagert, entweder in Tochterfirmen oder externe Dienstleister. Hinzu kommt, dass bei innovativen Konzepten ein strategischer Vertreter oder ein Ansprechpartner aus der Innova- tionsabteilung des Flughafens hinzugezogen werden muss. Dies erschwert den Koordinationsprozess und ein einheitliches Verständnis und bedarf einer gewissen Vorlaufzeit und guter Kommunikation. 4.5.2 Technische Herausforderungen Während der Pilotierung des Projekts wurden im Austausch mit einem Flughafen als möglicher Endan- wender bereits erste Herausforderungen identifiziert, die sich lediglich auf den Einsatz des Servicero- boters beziehen. Auf den Natursteinböden eines Flughafens ist für den Einsatz von Maschinen die maximale Bodenbe- lastung unbedingt zu beachten, um Beschädigungen an den Natursteinplatten und am Fußbodenauf- bau zu vermeiden. Bei dem Einsatz von Scheuersaugmaschinen darf eine definierte Bodenbelastung unter den Rädern nicht überschritten werden. Eine erste Messung der Serviceroboter von ADLATUS kam auf eine zu hohe Bodenbelastung, womit die Maschine weit über das Zweifache zu schwer für die geplante Pilotierung war. Eine Lösungsmöglichkeit wäre, breitere Reifen zu verwenden, um die Auf- stellflächen zu vergrößern und wie in vielen anderen Maschinen müssten kleinere Batterien eingebaut werden, um das Gewicht zu reduzieren. Darüber hinaus dürfen nicht die üblichen Reinigungsbürsten, sondern sogenannte Twister-Pads für die Reinigung verwendet werden. 4.6 Prototyp Der im Projekt umgesetzte Prototyp zeigt exemplarisch, wie die drei Roboter CR700 (grüne Symbole) von ADLATUS während der Ausführung einer Reinigungsaufgabe kontinuierlich Daten an einen Cloud- Service übertragen. Diese enthielten die Signalstärke aller WLAN-Accesspoints in der Umgebung ange- reichert mit den Positionsdaten. Das Cloud-Backend speicherte die Daten inklusive der Roboter-IDs und eines Zeitstempels ab. Für eine übersichtlichere Darstellung der Daten wurde zusätzlich die Karte an den Cloud-Service übertragen. In Abbildung 4 ist die Übersichtsansicht im Webbrowser für den Be- nutzer dargestellt. Der Grundriss der Testumgebung ist im Hintergrund eingeblendet. Im Prototyp (s. Abbildung 4) wird die WLAN-Signalstärke an der Position, an welcher sie aufgezeichnet wurde, in der Cloud Mall BW – Transferdokumentation „RoboSmartData“ 14
Karte durch Farbkodierung in Falschfarben 4 dargestellt. Der Benutzer hat einen zügigen Überblick über die Abdeckung des WLANs. Die Heatmap ist durch die Cloud über einen Internet-Browser online zu- gänglich. Sie zeigt anhand ihrer Farben, ob die WLAN-Signalstärke höher oder niedriger ist. Gelb/orange steht für hohe +60db Signalstärke, die in blau für niedrige Signalstärke unter 30db über- geht. In Abbildung 5 ist eine erweiterte Darstellung von Abbildung 4 zu sehen. Beim Klick auf einen Roboter öffnet sich ein individuelles Fenster, das alle WLAN-Signale aufzeigt, die der Roboter in seiner Position aufzeichnen kann. Mit einem Klick auf den Dropdown-Pfeil öffnen sich zusätzliche Details zum jeweiligen WLAN-Signal. Abbildung 4: Grundriss Testfahrt ADLATUS inklusive Heatmap Abbildung 5: Grundriss Testfahrt ADLATUS – Detailansicht Signale eines Roboters 4 Bei der Farbkodierung werden einzelnen Helligkeitsstufen eines Farbtons verschiedene Farbwerte zugeordnet; Quelle: https://de.wikipedia.org/wiki/Falschfarben Cloud Mall BW – Transferdokumentation „RoboSmartData“ 15
4.7 Erfahrungen von Endanwendern Bisherige Erfahrungen mit Endanwendern sind einerseits in den technischen Herausforderungen unter Abschnitt 4.5.2 beschrieben. Andererseits zeigte sich bei ersten Gesprächen, auch mit internationalen Flughäfen, Interesse an der Gewinnung zusätzlicher Daten. Dabei fiel darüber hinaus auf, dass wie un- ter Abschnitt 4.5.1 beschrieben, die Integration von Reinigungsdienstleistern und weiteren Interessen- gruppen des Flughafens in ein Projekt erforderlich sind. Cloud Mall BW – Transferdokumentation „RoboSmartData“ 16
5 Integration und Kooperation zwischen den beteiligten Unternehmen 5.1 Organisatorisches Die Durchführung des Praxispiloten begann im November 2020 und wurde im März 2021 fertiggestellt. Seitens ADLATUS wurde zu Beginn der Konzeptionierung und strategischen Ausrichtung die Geschäfts- führung involviert. Die weitere Umsetzung wurde dann durch die technische Leitung des Herstellers für Serviceroboter übernommen. Die wesentlichen Aufgaben lagen dabei sowohl in der Konzeption der Integrationslösung als auch in der technischen Umsetzung mit einem ersten Testlauf. Die Projektverantwortlichkeit bei AMORPH wurde dem Geschäftsbereich Business Development zuge- ordnet. Dort wird einerseits an der Entwicklung neuer Service-Konzepte gearbeitet. Andererseits be- steht der direkte Kontakt zu Endanwendern. Diese Schnittstelle zum Markt erbrachte bereits während der Konzeptionsphase erste Bestätigungen durch Kundenfeedback zur Relevanz des innovativen Vor- habens für Flughäfen. Das Business Development Team wurde von Softwareingenieuren und -Entwick- lern unterstützt, die insbesondere im Austausch mit der technischen Leitung von ADLATUS die REST- API zur Verfügung gestellt haben und die Integration der Daten in die Cloud-Lösung von AMORPH.aero ermöglichten. Nach der Übertragung der Testlauf-Daten wurde demzufolge seitens AMORPH die Visu- alisierung in Form einer Heatmap vervollständigt. Da die strategische Relevanz des Pilotkonzepts recht früh erkannt wurde, wurde seitens AMORPH darüber hinaus die Geschäftsleitung in das Vorhaben in- volviert. Dies diente beispielsweise zur Diskussion von Verwertungsmöglichkeiten sowohl aus werbli- cher als auch aus kommerzieller Sicht. Siehe Abbildung 6 für Details zur Projektorganisation. Beratend und organisatorisch unterstützt wurde die Kooperation durch Dominik Stricker und Rudolf Mietzner vom Cloud Mall BW-Partner bwcon research gGmbH. Der wesentliche Fokus lag dabei auf der Erstellung der vorliegenden Transferdokumentation und Koordination des Pilotprojekts. Des Wei- teren wurden mögliche Ansätze für eine Verwertungsstrategie diskutiert. Die Kommunikation während des Praxispiloten fand im Anschluss an ein initiales Kick-Off-Meeting digital in Form von Telefon- und Webkonferenzen statt. Abbildung 6: Organigramm Konzeption & Dokumentation / Organigramm technische Umsetzung Cloud Mall BW – Transferdokumentation „RoboSmartData“ 17
5.2 Technisches Nach der Ableitung der Anforderungen wurde ein Konzept für das Projekt erstellt. Im zweiten Schritt implementierten AMORPH und ADLATUS die im Konzept definierten Arbeitspakete. Bei AMORPH wa- ren dies die Umsetzung einer sicheren Datenübertragung der Sensordaten inkl. Metainformationen vom Roboter in die Cloud sowie die Umsetzung von Backend-Services in der Cloud zur Auswertung und Speicherung der übertragenen Daten. ADLATUS integrierte hardware- sowie auch softwareseitig die Sensoren am Roboter und implementierte die Datenübertragung unter Verwendung der von AMORPH implementierten REST-API. Die Gesamtfunktion wurde anhand von Komponenten- und Integrations- tests ausgiebig geprüft. Abschließend wurde von allen Projektpartnern eine Dokumentation der Um- setzung und der Ergebnisse erstellt. 5.3 Strategisches Auf strategischer Ebene öffnete dieses Projekt neue Denkrichtungen – sowohl für ADLATUS und AMORPH selbst, als auch im Hinblick auf die Entstehung neuer Wertschöpfungsketten und Geschäfts- modellinnovationen. Die einzelnen Aspekte werden folglich kurz behandelt: Strategische Ausrichtung ADLATUS Als agiles, junges Unternehmen denkt ADLATUS nicht erst seit dem Praxispiloten darüber nach, seine Serviceroboter über ihren originären Einsatz hinaus für die Gewinnung und Nutzung von Daten einzu- setzen. Jedoch lieferte dieser Use Case einen tieferen Einblick in zukünftige Anwendungsmöglichkeiten und damit konkrete Ideen zur strategischen Ausrichtung und deren Differenzierung. Dies betrifft so- wohl die Produktentwicklung als auch die Anbahnung von Kooperationspartnerschaften. Ein Beispiel auf der Produktentwicklungsebene zeigt, dass die Kooperation mit einem Infrastrukturanbieter inner- halb eines Gebäudes wie AMORPH die Möglichkeit schafft, den Betrieb des Roboters künftig nicht mehr zeit-, sondern eventgetrieben zu steuern. Das bedeutet, dass ein optimierter Reinigungseinsatz ermöglicht wird und die Daten nützlich für die Effizienzsteigerung des Roboters sind. Andererseits sind auch nachgefragte Anwendungen denkbar, die den Roboter als reinen Datenaggregator innerhalb neuer Wertschöpfungsketten denkbar machen. Außerdem eröffnen weitere Datenübertragungstech- nologien wie zum Beispiel die RFID-Kennung zusätzliche Ideen im Kontext des Internets der Dinge. Strategische Ausrichtung AMORPH Für die Strategie von AMORPH und deren Produkt AMORPH.aero ist die Sammlung und Aufbereitung der Daten seit Produktentwicklung der entscheidende Treiber. Der Praxispilot schafft einen prakti- schen Nachweis, dass strategische Kooperationen immer bedeutender werden. Denn Datenlieferan- ten sind nicht mehr nur bereits installierte Hardwarekomponenten, Check-in-Schalter oder sonstige externe Datenanbieter. Durch das Internet der Dinge sind immer mehr Produkte und Gegenstände, die innerhalb des Flughafens einen Lebenszyklus durchlaufen, vernetzbar und können als Datenliefe- rant dienen. Je mehr Daten AMORPH daher vorliegen, desto besser werden die Services auf qualitati- ver als auch auf quantitativer Ebene. Dies rückt den Fokus weg vom reinen Terminalmanagement-Sys- tem hin zu einem zentralen Player, Datensammelpunkt und Analyseinstrument innerhalb des Cloud Mall BW – Transferdokumentation „RoboSmartData“ 18
Ökosystems und Datensees Flughafen. Das führt gleichermaßen dazu, dass sich auch die Kunden- gruppe auf Subunternehmen und Dienstleister sowie Einzelhändler innerhalb eines Flughafenbetriebs und die Anwendung von der Überwachung des Passagierflusses auf Media und Advertisement erwei- tern. Wertschöpfungsketten Während es bisher für die Praxispilotpartner im Einzelnen meist eindeutig war, wer der zentrale An- sprechpartner für den entsprechenden Service ist, hat sich im Laufe des Projekts und im Austausch mit ersten potentiellen Endanwendern gezeigt, dass sich dies auf Basis des Piloten komplexer darstellt. Das bedeutet, dass sich mit Zunahme der möglichen Datenschnittstellen die Anzahl der Stakeholder innerhalb einer Wertschöpfungskette potenziert. Auch die strategischen Ideen und in Abschnitt 4.4 behandelten Geschäftsmodelle zeigen, dass im Kontext des Internets der Dinge plötzlich mehrere Ver- antwortungsbereiche über einen Service entscheiden. Geschäftspartner werden dadurch gleicherma- ßen Dienstleistungsempfänger oder -anwender und die Konzentration des Ökosystems liegt auf dem Endkunden „Passagier“, dessen sogenannte Passenger Experience gesteigert werden soll. Aus strate- gischer Sicht beider Unternehmen bedeutet das gleichermaßen, dass die datenbasierte Wertschöp- fung eine intensivere Moderation von Anspruchsgruppen verlangt. Allerdings sind die Servicekonzepte auch auf alternative Bereiche anwendbar. Dazu gehören beispielsweise große Industrie- und Produk- tionsgebäude (Industrie 4.0) oder Städte (Smart City). 5.4 Rechtliches Für die Zusammenarbeit innerhalb des Praxispiloten wurden von allen Beteiligten die Cloud Mall BW- Teilnahmebedingungen unterzeichnet. Diese regeln unter anderem Aspekte der Vertraulichkeit, Ge- währ und Haftung sowie die Einräumung von Nutzungsrechten. Bei diesem Praxispiloten wurden keine vertraulichen Daten ausgetauscht, über deren Speicherung oder Verwendung eine genauere rechtliche Festsetzung notwendig gewesen wäre. Cloud Mall BW – Transferdokumentation „RoboSmartData“ 19
6 Resümee
6.1 Rolle der Cloud
Mit der Umsetzung des Praxispiloten und Integration von Sensordaten des ADLATUS Reinigungsrobo-
ters in die AMORPH.aero Cloud-Lösung werden für Nutzer des ADLATUS Reinigungsroboter neue Zu-
satzleistungen und Dienste ermöglicht. Die AMORPH.aero Plattform kann mit zusätzlichen Daten ver-
sorgt werden, die der Passagierflussoptimierung und der Ressourcenplanung eines Flughafens dienen.
Rolle der Cloud ist somit, dass Anwendungen zur Steuerung und Überwachung des Roboters und Zu-
satzleistungen angeboten werden können, ohne dass lokale Anwendungen innerhalb des Flughafens
installiert werden müssen.
6.2 Lessons Learned
Folgende Lessons Learned können zusammengefasst werden:
Diverse Stakeholder sind innerhalb der Wertschöpfungskette zur Implementierung eines Ser-
vice nötig.
Die Anbindung des Roboters an ein Cloud-System ist grundsätzlich sehr einfach möglich.
Insgesamt konnten beide Partner durch die Kooperation und die Zusammenarbeit im Praxispi-
loten ausgezeichnete Erfahrungen sammeln und Einblicke in neue Bereiche gewinnen.
6.3 Ausblick
Da das entwickelte Pilotkonzept im Rahmen von Cloud Mall BW in einem Steckbrief zusammengefasst
wurde, nutzten AMORPH, ADLATUS und bwcon die Gelegenheit, den Praxispiloten bereits in Gesprä-
chen mit potentiellen Endanwendern vorzustellen. Hierbei bestätigten die Kontaktpersonen die Rele-
vanz des Konzepts und zeigten Interesse. Erste, gemeinsame Gespräche zur Vorstellung und Diskussion
der Anwendungsmöglichkeiten fanden bereits auf nationaler sowie internationaler Ebene statt. Die
Grundlage dieses Piloten ist die REST-API von AMORPH, die es ADLATUS ermöglicht, sämtliche Daten
zu übertragen. Der umgekehrte Datenfluss gestaltet sich noch etwas schwieriger. Nichtsdestotrotz ist
der Use Case zur Erstellung der WLAN-Heatmap nur eine erste Anwendung. Es ist denkbar dieses Prin-
zip noch auf viele andere Signale anzuwenden, dazu gehören bspw. Laut- und Lichtstärke.
Eine erweiterte Leistungsstufe ist ebenfalls denkbar. Zur Weiterentwicklung können anhand des Ein-
satzes von KI korrelierende Daten aus den beiden Quellen für Smart Services genutzt werden. Im Kon-
text der beschriebenen Problemstellung ist es das Ziel, dass die Künstliche Intelligenz dem Terminal-
management-System Empfehlungen zur Disponierung der Desinfektion des Flughafens gibt und diese
von den Reinigungsrobotern ausgeführt werden. Deren Einsatz würde somit nicht nur nach einem fest-
gelegten Reinigungsmuster erfolgen, sondern durch ein intelligentes Demand System, das den Bedarf
dynamisch anhand der vorliegenden Erfordernisse evaluiert.
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 20Außerdem ist ein Einsatz des Gesamtsystems nicht nur am Flughafen einsetzbar, sondern in vielen
weiteren Feldern und Anwendungsfällen möglich:
Erweiterung der Dienstleistungsmöglichkeiten im Facility-Management für Smart Cities (Bahn-
hof, Parkhaus, Einkaufszentrum) und Industrie 4.0 (Produktionsfläche, Logistik)
Steigende Herausforderungen an Hygienestandards
Mensch-Maschine-Interaktion für effizientere Entscheidungen (Prädiktive Lösungen)
(Unternehmerische) Verwendung der erhobenen Daten
Cloud Mall BW – Transferdokumentation „RoboSmartData“ 217 CMBW-Projektdarstellung Im Gemeinschaftsprojekt Cloud Mall Baden-Württemberg (Cloud Mall BW) werden Potenziale und Möglichkeiten von Cloud Computing für den Mittelstand in Baden-Württemberg identifiziert und aus- geschöpft. Kleinen und mittleren Cloud-Serviceanbietern und -anwendern wird ein Rahmen geboten, um untereinander Kooperationen zu schließen, das eigene Netzwerk zu stärken und dadurch aktiv Wettbewerbsvorteile auszubauen. Kooperative Ideen kleiner und mittlerer Cloud-Service oder Cloud- Plattformanbieter werden gezielt in Praxispiloten vorangetrieben und personell und fachlich vom Cloud Mall BW-Projektteam unterstützt. Das Gemeinschaftsprojekt wird vom Ministerium für Wirtschaft, Arbeit und Wohnungsbau Baden- Württemberg gefördert. Beteiligt sind das Fraunhofer-Institut für Arbeitswirtschaft und Organisation (IAO), das Fraunhofer-Institut für Produktionstechnik und Automatisierung (IPA), sowie das Institut für Enterprise Systems an der Universität Mannheim (InES) und bwcon research GmbH (bwcon). Unter- auftragnehmer des Projekts sind Trusted Cloud und das Institut für Arbeitswissenschaften und Tech- nologiemanagement (IAT) der Universität Stuttgart. In der Projektzeit ist die Durchführung von bis zu vierzig Praxispiloten geplant. Cloud Mall BW – Transferdokumentation „RoboSmartData“ 22
8 Kontakt Gerne können die Vertreter der Praxispilotpartner bei Fragen und Anmerkungen zum Praxispilot oder zu Inhalten direkt angesprochen werden: ADLATUS Robotics GmbH Siegfried Hochdorfer mailto:siegfried.hochdorfer@adlatus-robotics.com Amorph Systems GmbH Andreas Hofmann mailto:andreas.hofmann@amorphsys.com CMBW - Projektleiter des Praxispiloten Bwcon research gGmbH Dominik Stricker mailto:stricker@bwcon.de Weitere Information zum Thema Praxispiloten finden Sie unter der Projektwebsite: https://cloud-mall-bw.de/ Cloud Mall BW – Transferdokumentation „RoboSmartData“ 23
Sie können auch lesen