EINFÜHRUNG IN DIE BAUSTATIK - Bruno Sudret - ETH Zürich
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

EINFÜHRUNG IN DIE BAUSTATIK
Bruno Sudret
CHAIR OF RISK, SAFETY AND UNCERTAINTY QUANTIFICATION Risk, Safety &
STEFANO -FRANSCINI-PLATZ 5 Uncertainty Quantification
CH-8093 ZÜRICH
Einführung in die
Baustatik
Bruno Sudret
Institut für Baustatik und Konstruktion – ETH ZürichDanksagung. – Dieses Baustatik Skript wurde ursprünglich von Prof. Dr. Bruno Sudret auf
Französisch verfasst. Dr. Moustapha Maliki lektorierte die französische Version. Dr. Roland
Schöbi (Kapitel 1–3) und Philippe Wiederkehr (Kapitel 4-11) übersetzten das Skript vom Fran-
zösischen ins Deutsche. Paul-Remo Wagner lektorierte die deutsche Version, er fertigte auch
alle Figuren und Zeichnungen an. Ich bedanke mich für die Unterstützung dieser Studenten
und Kollegen am Lehrstuhl für Risiko, Sicherheit und Quantifizierung von Ungewissheiten
(ETH Zürich).
© Bruno Sudret, Sept. 2017 - Sept. 2020
Bildquelle.– Alle Skizzen und Zeichnungen in diesem Skript sind Originale. Alle Fotos wurden
entweder persönlich vom Autor gemacht, oder aus dem Internet geladen (lizenzfreie Bilder).
Wie ist dieses Skript zu zitieren? – B. Sudret, Einführung in die Baustatik, ETH Zürich, 2020.Vorwort
Was ist die Baustatik ?
Von einem historischen Standpunkt ist die Baustatik eine antike Wissenschaft. Die Prinzipien
des Hebelarms oder des auf Festkörper wirkenden Auftriebs stammen von Archimedes1 . Das
erste bekannte Problem der Baustatik wurde von Galileo im Jahr 16382 formuliert und bezieht
sich auf den Widerstand eines Kragarms (Abbildung 1). Die fundamentalen Gesetze der Dy-
namik von Newton und die Arbeiten von Euler und Bernoulli3 über Balken haben es erlaubt,
dieses Wissen während des gesamten 18. Jahrhunderts zu vertiefen.
Abbildung 1: Erstes Problem der Baustatik: Widerstand eines Kragarms (Galileo, 1638)
Schon früher und daher unabhängig davon wurden grosse Bauwerke (Brücken, Burgen, Fe-
stungen, Kathedralen, Türme, usw.) anhand einfacher Regeln der grafischen Statik und empi-
rischer Natur konstruiert. Es dauerte jedoch bis in die erste Hälfte des 19. Jahrhunderts, um
die Verbindung zwischen den physischen Wissenschaften und der Baustatik herzustellen (im
vorliegenden Fall die korrekte Formulierung der Spannungs- und Dehnungsbeziehungen in
deformierbaren Festkörpern). Hier sind insbesondere die Arbeiten von Cauchy, Navier, Green,
Lagrange und Saint-Venant 4 zu erwähnen.
1
Archimedes von Syrakus (287 – 212 v.Chr.)
2
Galileo Galilei (1564 – 1642). Discorsi e dimostrazioni matematiche intorno a due nuove scienze attenenti alla
mecanica e i movimenti locali.
3
Isaac Newton (1643 – 1727); Leonhardt Euler (1707 – 1783); Daniel Bernoulli (1700 – 1782).
4
Augustin-Louis Cauchy (1789 – 1857); Claude-Henri Navier (1785 – 1836); George Green (1793 – 1841);
Joseph-Louis Lagrange (1736 – 1813); Adhémar Barré de Saint-Venant (1797 – 1886).
iDie Entwicklung der heutigen “klassischen” Methoden um Kräfte und Verschiebungen in Struk-
turen zu berechnen stammt aus der zweiten Hälfte des 19. Jahrhunderts, besonders aus den
Arbeiten von Culmann (grafische Statik), Ritter, Mohr, Castigliano und Müller-Breslau 5 .
Die vor allem geschichtlich interessanten grafischen Methoden sind heutzutage durch die Ein-
führung numerischer Simulationen obsolet geworden: Ingenieurbüros nutzen heute häufig
Berechnungscodes mit finiten Elementen, um komplexe Bauwerke zu modellieren und ihre
Dimensionierungen anhand der Dimensionierungsnormen (SIA Normen in der Schweiz oder
Eurocodes) rechtskräftig zu überprüfen. Für den Ingenieur des 21. Jahrhunderts ist es folglich
so wichtig wie nie zuvor, die von Softwares verwendeten mechanischen Modelle zu verstehen.
Er muss fähig sein, komplexe Strukturen anhand von Modellen darzustellen und vereinfachte
statische Modelle “von Hand” zu berechnen. Dies soll ihm ermöglichen, numerische Verfahren
zu bestätigen und die Verbindung zwischen einfachen Modellen und numerischen Berechnun-
gen anhand finiter Elemente herzustellen. Es ist die Ambition dieses Kurses Baustatik I, die
elementaren Konzepte zu präsentieren, die ihrerseits als Grundlage für die weiterführenden
Kurse dienen.
Organisation des Kurses
Ziele
Das Ziel des Kurses Baustatik I ist es, den Studenten die grundlegenden Berechnungskenntnis-
se für elastische Strukturen, welche aus eindimensionalen Elementen (Stäbe, Balken, Seile)
zusammengesetzt sind, zu vermitteln. Eindimensional heisst in diesem Zusammenhang, dass
zwei Dimensionen (diejenigen, die den Querschnitt beschreiben) im Vergleich zur dritten klein
sind. Zunächst wird die Definition von Schnittgrössen präsentiert. Um die daraus entstehenden
lokalen Spannungen sowie die Deformationen und Verschiebungen zu berechnen, sind Verein-
fachungen und die Verbindung mit der Kontinuumsmechanik notwendig: dies führt zu den
Balkenmodellen von Euler-Bernoulli und Timoshenko. Die Kombination von Gleichgewichts-
gleichungen, kinematischen Beziehungen und Stoffgesetzen erlaubt es, elastische Verformun-
gen zu berechnen. Energieansätze ermöglichen es direkt Verschiebungsgrössen an einem be-
liebigen Punkt zu ermitteln. Sie bilden die Grundlage der Kraftmethode, mit welcher statisch
unbestimmte Systeme gelöst werden können.
Detailprogramm
Kapitel 1 beginnt mit einer Wiederholung der grundlegenden Begriffe der Festkörpermecha-
nik: Kräfte, Momente, Bindungskräfte und Lagerreaktionen. Das Axiom der Statik, welches
das Gleichgewicht eines mechanischen Systems unter Belastung ausdrückt, wird eingeführt.
Die Verbindung mehrerer nicht deformierbarer Festkörper führt zur Formulierung von inneren
Bindungskräften im System. Schlussendlich werden die Begriffe der statischen Bestimmtheit
und Unbestimmtheit erläutert.
5
Karl Culmann (1821 – 1881); August Ritter (1826 – 1908); Christian Otto Mohr (1835 – 1918); Heinrich
Müller, sog. Müller-Breslau (1851 – 1925); Carlo Alberto Castigliano (1847 – 1884).
iiIn Kapitel 2 werden innere Kräfte und Momente, sogenannte Schnittgrössen (Normalkräfte,
Querkräfte, Biegemomente, Torsionsmomente), in geraden Balken eingeführt und eine Me-
thode basierend auf dem Gleichgewicht an Teilsystemen entwickelt, die deren Berechnung in
jedem Punkt des Systems ermöglicht. Zugleich werden die Differentialgleichungen des lokalen
Gleichgewichts bei Balken in der Ebene sowie beim räumlichen Balken hergeleitet.
In Kapitel 3 geht es um Strukturen mit gekrümmter Geometrie, wie Bogen und Seile. Die Stütz-
linie, welche wichtig ist um zu verstehen, wie die geometrische Form der Struktur den inneren
Kräften angepasst werden kann, wird definiert. Die gewonnenen Erkenntnisse werden auf das
Gleichgewicht der Bögen angewendet. Zum Schluss werden dehnstarre Seile behandelt, bei
welchen die Gleichgewichtsgeometrie von der aufgetragenen Belastung abhängt.
Kapitel 4 ist den Fachwerken gewidmet. Das Modell des idealen Fachwerks nimmt an, dass ein
System aus Stäben zusammengesetzt ist, die nur Zug- und Druckkräfte übernehmen und gelen-
kig miteinander verbunden sind. Zunächst werden diese Fachwerkkräfte anhand des Knoten-
gleichgewichts bestimmt. Anschliessend werden zwei Ansätze präsentiert (Ritterschnitt und
Prinzip der virtuellen Arbeit), um einzelne Stabkräfte direkt bestimmen zu können.
In Kapitel 5 werden die Einflusslinien an statisch bestimmten Systemen vorgestellt. Sie er-
lauben die Darstellung einer Reaktion (bzw. Schnittgrösse oder Verschiebung) als Funktion
der Position einer beweglichen Einheitslast. Solche Einflusslinien können elegant durch die
kinematische Methode nach Land bestimmt werden.
Kapitel 6 wiederholt die grundlegenden Begriffe der Kontinuumsmechanik: Spannungs- und
Dehnungstensor, Hypothese der kleinen Verformungen und elastisches Stoffgesetz. Damit soll
eine Verbindung zwischen der eindimensionalen Tragwerksmodellierung (Schnittgrössen) und
dem lokalen dreidimensionalen Spannungszustand hergestellt werden. Ausserdem werden das
Prinzip der virtuellen Arbeit in der Version der Kontinuumsmechanik sowie die Prinzipien der
minimalen potenziellen (bzw. Ergänzungs-) Energie präsentiert.
Kapitel 7 nimmt sich der Berechnung von Spannungen und Dehnungen auf Querschnittsebe-
ne an. Mithilfe von vereinfachenden Hypothesen, erhält man das Balkenmodell nach Euler-
Bernoulli. Dieses Modell ermöglicht die Berechnung der Normal- und Schubspannungen an
einem Querschnitt, wenn die zugehörigen Schnittkräfte aus der externen Belastung berechnet
wurden. Es werden Voll- und dünnwandige Querschnitte sowie Verbundquerschnitte betrach-
tet.
In Kapitel 8 werden die Grundlagen der sogenannten Saint-Venant’schen Torsionstheorie vor-
gestellt. Der Spannungszustand aus einem Torsionsmoment wird zuerst mithilfe der Kontinu-
umsmechanik hergeleitet, wobei die Wölb- und Spannungsfunktion eingeführt werden. Da-
nach werden spezielle Lösungen für Voll- und dünnwandige Querschnitte präsentiert.
In Kapitel 9 wird gezeigt, wie die Kombination von Gleichgewichtsgleichungen, kinematischen
Beziehungen und elastischen Stoffgesetzen zur Differentialgleichung der Verformungslinie ei-
nes Balkens führt. Danach wird das Timoshenko Balkenmodell eingeführt, das für gedrungene
(grosses Verhältnis von Querschnittsabmessungen zur Länge) Elemente besser geeignet ist als
das Euler-Bernoulli Modell.
iiiIn Kapitel 10 werden die elastischen Potenziale am Balken aus der Kontinuumsmechanik her-
geleitet. Das Prinzip der virtuellen Arbeit wird erneut bei Balkensystemen eingeführt. Die Ener-
giesätze nach Castigliano und Müller-Breslau erlauben es, Verschiebungen nur an bestimmten
Punkten zu erhalten, ohne die gesamte Verformungslinie durch Integration der jeweiligen Dif-
ferentialgleichung zu berechnen. Spezielle Beanspruchungen, wie die thermische Belastung
und aufgezwungene Verschiebung (z.B. Lagersenkung), werden schlussendlich behandelt.
In Kapitel 11 wird die Kraftmethode zur Berechnung der Schnittkräfte bei statisch unbestimm-
ten Systemen eingeführt. Diese Methode formt das vorhandene Problem in eine Menge statisch
bestimmter Probleme an einem Grundsystem um. Diese statisch bestimmten Probleme erhält
man, indem man Bindungen oder Lagerreaktionen löst, wobei anschliessend die geometri-
sche Verträglichkeit verlangt wird. Schliesslich wird gezeigt, dass man durch Minimierung der
potenziellen Ergänzungsenergie zum selben Resultat gelangt (Satz von Menabrea).
ivInhaltsverzeichnis
1 Gleichgewicht starrer Systeme 1
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Mechanische Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Kinematik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Hypothese kleiner Verformungen und Superpositionsprinzip . . . . . . . . 5
2.3 Kräfte und Momente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4 Moment einer Kraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Gleichgewichtsgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1 Dyname . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.2 Gleichgewicht statischer Systeme . . . . . . . . . . . . . . . . . . . . . . . . . 12
4 Lagerreaktionen und Bindungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.1 Lager . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4.2 Bindungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3 Grad der statischen Unbestimmtheit . . . . . . . . . . . . . . . . . . . . . . . 20
5 Zusammenfassende Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.1 Berechnungsverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.2 Beispiel 1: Einfacher Balken . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.3 Beispiel 2: Dreigelenkbogen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5.4 Beispiel 3: Eingespannter Träger . . . . . . . . . . . . . . . . . . . . . . . . . 25
5.5 Beispiel 4: Statisch unbestimmter Balken . . . . . . . . . . . . . . . . . . . . 27
v2 Statisch bestimmte Stabtragwerke 31
1 Balkengeometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2 Schnittgrössen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.1 Schnittdefinition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2 Resultierende der Schnittgrössen . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.3 Berechnungsverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3 Balken in der Ebene . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2 Orientierungs- und Vorzeichenkonventionen . . . . . . . . . . . . . . . . . . 38
3.3 Beispiel: einfach gelagerter Balken unter Einzellast . . . . . . . . . . . . . . 38
3.4 Schnittgrössendiagramme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4 Lokale Gleichgewichtsbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.1 Gerader Balken in der Ebene . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.2 Verbindung mit den Schnittgrössendiagrammen . . . . . . . . . . . . . . . . 44
4.3 Räumlicher gerader Balken . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5 Elementare Anwendungsbeispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.1 Einfach gelagerter Balken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.2 Kragarm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.3 Galgen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3 Gekrümmte Balken, Seile und Bogen 53
1 Geometrie ebener Bogen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
1.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
1.2 Frenet’sche Formeln . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
1.3 Parametrisierte Kurve im kartesischen Koordinatensystem . . . . . . . . . 55
1.4 Lokales Gleichgewicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2 Stützlinien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.2 Gleichung der Stützlinie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.3 Druckkraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
vi2.4 Eigengewicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.5 Vertikallast (Schnee) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3 Seile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.2 Geometrie eines Seils unter fixierter Belastung . . . . . . . . . . . . . . . . 66
3.3 Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4 Statisch bestimmter Bogen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.2 Dreigelenkbogen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4 Elastische Fachwerke 79
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
2 Ideale Fachwerke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.1 Hypothese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
2.2 Grad der statischen Unbestimmtheit . . . . . . . . . . . . . . . . . . . . . . . 82
2.3 Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3 Berechnungsverfahren für statisch bestimmte Fachwerke . . . . . . . . . . . . . . . 84
3.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.2 Knotengleichgewicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.3 Ritter’sche Schnittmethode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4 Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.1 Virtuelle Verschiebungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.2 Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.3 Anwendung: Berechnung von Lagerreaktionen . . . . . . . . . . . . . . . . 94
4.4 Anwendung: Berechnung von Stabkräften . . . . . . . . . . . . . . . . . . . 95
5 Einflusslinien 97
1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
1.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
1.2 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
vii2 Direkte Berechnung anhand der Statik . . . . . . . . . . . . . . . . . . . . . . . . . . 98
2.1 Prinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
2.2 Gerader Balken auf zwei Lagern . . . . . . . . . . . . . . . . . . . . . . . . . 98
2.3 Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
3 Methode nach Land . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
3.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
3.2 Lagerreaktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
3.3 Schnittgrössen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
3.4 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3.5 Verschiebungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4 Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.1 Verwendung der Einflusslinien . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.2 Durchlaufträger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
4.3 Fachwerk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5 Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
6 Grundlagen der Kontinuumsmechanik 113
1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
2 Spannungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
2.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
2.2 Spannungstensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
2.3 Gleichgewichtsgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
2.4 Eigenschaften des Spannungstensors . . . . . . . . . . . . . . . . . . . . . . 122
3 Verzerrungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
3.1 Abbildung im Kontinuum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
3.2 Verzerrungstensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
3.3 Zweidimensionaler Fall: physikalische Bedeutung . . . . . . . . . . . . . . . 136
4 Stoffgesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
4.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
4.2 Lineare Elastizität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
viii5 Probleme der linearen Elastizität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
5.1 Zusammenfassung der Gleichungen . . . . . . . . . . . . . . . . . . . . . . . 144
5.2 Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
5.3 Randwertproblem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
6 Energiesätze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
6.1 Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
6.2 Elastische Potenziale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
6.3 Energiesätze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
7 Spannungen in elastischen Balken 159
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
1.1 Motivation zur Spannungsabschätzung . . . . . . . . . . . . . . . . . . . . . 159
1.2 Spannungsresultierende . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
1.3 Zwei grundlegenden Versuche . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
2 Euler-Bernoulli Balken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
2.1 Kinematik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
2.2 Hypothese der Spannungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
3 Normalspannungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
3.1 Stoffgesetz am Balken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168
3.2 Navier’sche Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
3.3 Kern des Querschnitts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
3.4 Ergänzungsenergie bei Zug/Druck . . . . . . . . . . . . . . . . . . . . . . . . 176
3.5 Inkohärenz der Hypothesen der Theorie . . . . . . . . . . . . . . . . . . . . 177
4 Schubspannungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
4.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 179
4.2 Resultierende der Schubspannungen . . . . . . . . . . . . . . . . . . . . . . . 179
4.3 Satz von Schurawski . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
4.4 Wirksame Schubfläche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
5 Komplexe Querschnitte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
5.1 Geometrische Eigenschaften des Querschnitts . . . . . . . . . . . . . . . . . 186
5.2 Dünnwandige Querschnitte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
5.3 Verbundquerschnitte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
ix8 Saint-Venant’sche Torsion 209
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
2 Balken mit Vollquerschnitten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
2.1 Hypothese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
2.2 Balken mit Kreisquerschnitten . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
2.3 Balken mit beliebigen Querschnitten . . . . . . . . . . . . . . . . . . . . . . . 215
2.4 Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
3 Dünnwandige Querschnitte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
3.1 Schmale Rechteckquerschnitte . . . . . . . . . . . . . . . . . . . . . . . . . . 221
3.2 Offene, dünnwandige Querschnitte . . . . . . . . . . . . . . . . . . . . . . . 222
3.3 Dünnwandige Hohlquerschnitte . . . . . . . . . . . . . . . . . . . . . . . . . 223
3.4 Komplexe Querschnitte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
9 Verformungen elastischer Balken 229
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 229
2 Elastische Verformung – Euler-Bernoulli Balken . . . . . . . . . . . . . . . . . . . . 230
2.1 Gleichgewicht, Stoffgesetz, Kinematik . . . . . . . . . . . . . . . . . . . . . . 230
2.2 Axiales Verschiebungsfeld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
2.3 Querverschiebungsfeld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233
3 Elastische Verformung – Timoshenko Balken . . . . . . . . . . . . . . . . . . . . . . 236
3.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
3.2 Timoshenko Kinematik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
3.3 Elastisches Stoffgesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
3.4 Querverschiebungsfeld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
3.5 Schubbalken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
4 Ergänzende Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
4.1 Kragarm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
4.2 Beidseitig eingespannter Balken (Euler-Bernoulli Modell) . . . . . . . . . . 245
x10 Energiesätze für Tragwerke 249
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
2 Elastische Potenziale für Balken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
2.1 Ergänzungspotenzial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 250
2.2 Elastisches Potenzial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
2.3 Kurzschreibweise des Potenzials . . . . . . . . . . . . . . . . . . . . . . . . . 255
3 Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
3.1 Statisch zulässige Schnittgrössen . . . . . . . . . . . . . . . . . . . . . . . . . 256
3.2 Virtuelles, kinematisch zulässiges Verschiebungsfeld . . . . . . . . . . . . . 256
3.3 Arbeit der äusseren Kräfte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
3.4 Arbeit der inneren Kräfte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 257
3.5 Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
4 Satz von Müller-Breslau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
4.1 Formulierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
4.2 Beweis mit dem Prinzip der virtuellen Arbeit . . . . . . . . . . . . . . . . . . 259
4.3 Anwendungsbeispiel: einfacher Balken unter Einzellast . . . . . . . . . . . 260
5 Nachgiebigkeitsmatrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
5.1 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
5.2 Nachgiebigkeitsmatrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
5.3 Satz von Maxwell-Betti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
5.4 Mohr’sche Integrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
6 Sätze von Clapeyron und Castigliano . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
6.1 Einleitung: lineare Feder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
6.2 Satz von Clapeyron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
6.3 Satz von Castigliano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
6.4 Anwendungsbeispiel: einfacher Balken unter Einzellast . . . . . . . . . . . 267
6.5 Alternativer Beweis des Satzes von Müller-Breslau . . . . . . . . . . . . . . 268
7 Ausgewählte Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
7.1 Statisch bestimmtes Fachwerk . . . . . . . . . . . . . . . . . . . . . . . . . . . 269
xi7.2 Balken unter verteilter Last . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272
7.3 Kragarm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272
7.4 Einflusslinien der Verschiebung . . . . . . . . . . . . . . . . . . . . . . . . . . 274
8 Komplettes Ergänzungspotenzial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
8.1 Federn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
8.2 Aufgezwungene Verschiebungen . . . . . . . . . . . . . . . . . . . . . . . . . 276
8.3 Thermische Belastung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 276
8.4 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 280
9 Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
11 Kraftmethode 287
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 287
1.1 Statisch unbestimmte Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . 287
1.2 Einführendes Beispiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 288
1.3 Prinzip der Kraftmethode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289
2 Intuitiver Ansatz zur Kraftmethode . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
2.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
2.2 Statisch zulässiges Feld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
2.3 Berechnung der Verschiebungen . . . . . . . . . . . . . . . . . . . . . . . . . 291
2.4 Verträglichkeitsbedingung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292
2.5 Superposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292
3 Allgemeiner Ansatz zur Kraftmethode . . . . . . . . . . . . . . . . . . . . . . . . . . 293
3.1 Eingespannter Balken mit Auflager . . . . . . . . . . . . . . . . . . . . . . . . 293
3.2 Lösen von Bindungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294
3.3 Satz von Menabrea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299
3.4 Superposition der Lastfälle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
3.5 Fazit: Berechnungsverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
4 Anwendungsbeispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
4.1 Eingespannter Balken mit Auflager . . . . . . . . . . . . . . . . . . . . . . . . 302
4.2 Durchlaufträger auf vier Lagern (h = 2) . . . . . . . . . . . . . . . . . . . . . 304
xii4.3 Statisch unbestimmtes Fachwerk . . . . . . . . . . . . . . . . . . . . . . . . . 308
4.4 Lagersetzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
4.5 Vorspannung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
5 Berechnung von Verschiebungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
5.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
5.2 Reduktionssatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312
5.3 Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313
A Mohr’sche Integrale 319
xiiiIndex
Axiom der Statik, 12 Axial, 231
Euler-Bernoulli, 233
Balken, 31
Timoshenko, 241
in der Ebene, 37
Timoshenko, 240
lokales Gleichgewicht, siehe auch Lokales
Drillsteifigkeit, 218
Gleichgewicht
Drillwiderstand
prismatischer, 31
Ellipsenquerschnitt, 220
räumlicher, 45
geschlossenes Hohlprofil, 226
Schnitt, 33
Komplexe Querschnitte, 228
Spannnungsvektor, 161
offener, dünnwandiger Querschnitt, 223
Balkenbelastung
Dyname, 10
Biegung und Normalkraft, 171
reine Biegung, 171 Einflusslinie, 98
schiefe Biegung, 172
anhand Statik, 98
Balkentheorie, 160
Methode nach Land, 100, 104
Euler-Bernoulli, 164
Verschiebung, 274
Hypothese der Spannungen, 168
Einstein’sche Summenkonvention, 114
Inkohärenz der Hypothesen, 178
Elastische Kontante
Navier’sche Gleichung, 170, 193, 205
Elastizitätsmodul, 142
Satz von Schurawski, 182, 183, 194, 206
Kompressionsmodul, 143
Stoffgesetz, 169
Lamé Konstanten, 141
Timoshenko, 243
Querdehnzahl, 142
Bindung, 18
Elastisches Potenzial
Biegegelenk, 18
Kontinuum, 150
Bindungskräfte, 18
Elastisches Potenzial
Einspannung, 18
Euler-Bernoulli, 253
Gleitgelenk, 18
Timoshenko, 254
Kombinierte Bindung, 18
elastisches Randwertproblem, 146
Wertigkeit, 18
Elastizitätsmodul
Bogen
Verbundquerschnitt, 204
Bogenmoment, 76
Energie
Bogenschub, 76
elastische Ergänzungsenergie, 177
Dreigelenkbogen, 75
Ergänzungsenergie, 154
Bredt’sche Formel, 226
Kurzschreibweise, 255
Differentialgleichung Potenzielle Energie, 153
Axialverschiebung, 231 Torsion, 254, 255, 285
Euler-Bernoulli, 233 Thermo-elastisch, 279
Randbedingung Verformungsenergie
315316 Index
Euler-Bernoulli, 253 räumlicher Balken, 45
Timoshenko, 254 Grad der statischen Unbestimmtheit, 20
Energiesatz allgemeines Abzählkriterium, 20
Satz von Betti, 156 Fachwerkabzählkriterium, 82
Satz von Castigliano, 267
Satz von Clapeyron, 156, 266 Hauptfaser, siehe auch Stabachse
Satz von Müller-Breslau, 259 Hauptspannung, 125
Satz von Maxwell-Betti, 264 Eigenwertproblem, 127
Satz von Menabrea, 300 Mohr’scher Kreis, 127
Ergänzungspotenzial, 251 Spannungsmaximierung, 126
Euler-Bernoulli Hypothese, 164 Hauptträgheitsachse, 191
Hypothese kleiner Verformungen, 5, 135
Fachwerk, 79 kleine Verschiebungen, 135
Berechnungsverfahren, siehe auch Fachwerk- kleine Verzerrungen, 135
berechnungsverfahren
Gurt, 80 innere Kraft, siehe auch Schnittkraft
ideales, 81
Kraftdarstellung, 88 Kern, 173
Nullstab, 89 äquivalente Normalkraft, 173
Pfosten, 80 einachsige Biegung, 174
Strebe, 80 schiefe Biegung, 174
Fachwerkberechnungsverfahren, 84 Kettenlinie, 62
Knotengleichgewicht, 85 Kinematik, 3
Prinzip der virtuellen Arbeit, 91 Kinematische Beziehungen, 144, 212
Ritter’sche Schnittmethode, 90 Euler-Bernoulli, 166
Flächendeviationsmoment, 188, 191 Timoshenko, 237
Verbundquerschnitt, 204 Kinematische Gleichung, 229
Flächeninhalt, 186 Kinematischen Beziehungen, 113
Flächenmoment Kontaktkraft, 115
1. Grades, siehe auch Statisches Moment Koordinatensystem
2. Grades, siehe auch Flächenträgheitsmo- Frenet’sches, 53
ment kartesisch, 54
gemischtes, siehe auch Flächendeviations- Kraft, 6
moment Normalkraft, 35
Flächenträgheitsmoment, 169, 191 Querkraft, 35
polares, 213 Kraftmethode
Verbundquerschnitt, 205 Berechnsungsverfahren, 301
Freiheitsgrad, 16 Grundsystem, 290
Frenet’sche Formeln, 55 Superposition, 301
Verträglichkeitsbedingung, 292
Gebrauchstauglichkeit, 160
Gleichgewichtsgleichungen, 10, 113, 144, 213, Lager
229 Einfaches Lager, 15
gekrümmter Balken, 57, 58 Einspannung, 16
gerader Balken, 42 Gelenklager, 16
Kontinuum, 119, 120 Gleitende Einspannung, 16Index 317
Gleitlager, 15 Reduktionssatz, 312
Rollenlager, 15 Referenzzustand, 130
Wertigkeit, 16 Reisslänge, 43
Last Resultierende, 7
Einheitslast, 98
Einzellast, 6 Satz v. Huygens-Steiner, 188
Flächenlast, 6 Schiebung, siehe auch Schubverzerrung
Linienlast, 6 Schnittgrösse, 33
Raumlast, 6 Berechnung, 35
Diagramm, siehe auch Schnittgrössendia-
Mechanismus, 17, 20 gramm
Interner, 20 Komponente, 34, 161, 162
Methode nach Land Resultierende, 34, 161
Lagerreaktion, 101 Schnittgrössendiagramm, 40
Schnittgrösse, 102 Konstruieren von, 44
Verschiebung, 274 Schnittkraft, 115
Minimum der Ergänzungsenergie, 154 Schubbalken, 242
Minimum der potenziellen Energie, 153 Schubmittelpunkt, 202
Moment, 7 Schubmodul, 143
Biegemoment, 35 Schubspannung, 124
Torsionsmoment, 35 Querkraft, 182, 183, 194, 206
Symmetrie, 124
Nachgiebigkeitsmatrix, 263
Torsion, 217, 225
Normalspannung, 123
Schubverzerrung, 138
Normalkraft und Moment, 170, 193, 205
Schubwinkel, siehe auch Schubverzerrung
Orientierungskonvention, siehe auch Vorzeichen-Schwerpunkt, 186
konvention Seil, 65
dehnstarr, 66
Potenzial Geometrie, siehe auch Seilgeometrie
elastische Ergänzungsenergie, 151 Seilgeometrie
Energiedichte, 152 Balkenanalogie, 68
Ergänzungspotenzial, 151, 176 lokales Gleichgewicht, 67
Euler-Bernoulli, 253 Spannung
Kontinuum, 150 Darstellung, 127
Timoshenko, 254 Spannungsfunktion, 216
Prinzip der virtuellen Arbeit, 92, 149 Spannungstensor, 117
Balken, 258 Basisänderung, 124, 125
Berechnung von Lagerreaktionen, 94 Randbedingungen, 123
Berechnung von Stabkräften, 95
Symmetrie, 122
Kontinuum, 148
Spannungsvektor, 115
Querschnittsfläche, 31 Stützlinie, 58
Verbundquerschnitt, 204 Eigengewicht, 62
Vertikallast, 64
Randbedingung, 145 Stabachse, 31
Randwertproblem, 146 Starrkörperbewegung, 91, 131318 Index
Statische Unbestimmtheit der Lager, 21
Statisches Moment, 181, 197
Eigenschaften, 183
Stoffgesetz, 114, 139, 144, 212, 229, 238
Balken, 169
isotropes Material, 141
lineare Elastizität, 140
thermo-elastisch, 278, 279
Timoshenko, 240
Torsion, 213
Verbundquerschnitt, 205
Superpositionsprinzip, 5
Tangentialspannunge, siehe auch Schubspan-
nung
Theorie erster Ordnung, 135
Timoshenko Hypothese, 237
Trägheitsradius, 174
Tragfähigkeit, 160
Verbundquerschnitt, 203
Verformungszustand, 130
Verschiebungsfeld, 130
Verwindung, 213
Verzerrung, 130
Dehnung, 132
Schub, 138
Tensor, 133
Verzerrungsenergie
Euler-Bernoulli, 253
Kontinuum, 150
Timoshenko, 254
Verzerrungstensor, 133
linear, 135
Virtuelle
Arbeit, 91
Spannung
statisch zulässig, 147
Starrkörperbewegung, 91
Verschiebung, 91
kinematisch zulässig, 147
Vorzeichenkonvention, 38
Wölbfunktion, 215
Werkstoffgleichung, siehe auch Stoffgesetz
Wirksame Schubfläche, 185Anhang A
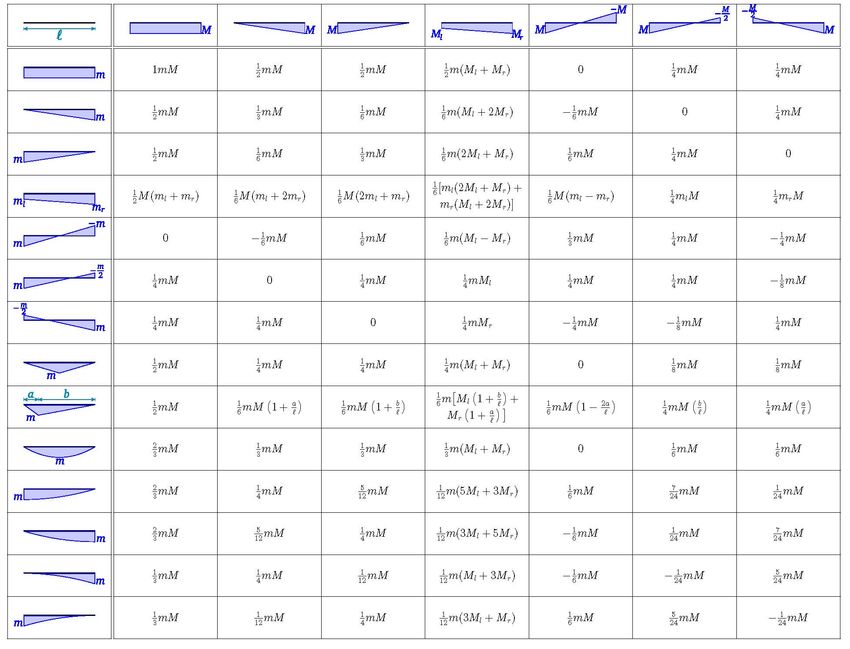
Mohr’sche Integrale
Auf den folgenden Seiten sind einige der am häufigsten benutzten Mohr’schen Integrale tabel-
liert.
319320 Anhang A. Mohr’sche Integrale
321
Literaturverzeichnis
Frey, F. (2014). Analyse des structures et milieux continus, Volume 1: Mécanique des structures.
Presses Polytechniques et Universitaires Romandes.
Mang, H. and G. Hofstetter (2013). Festigkeitlehre (4 ed.). Springer.
Marti, P. (2013). Baustatik – Grundlagen, Stabtragwerke, Flächentragwerke (2 ed.). Ernst &
Sohn.
Salençon, J. (2001). Handbook of Continuum Mechanics – General Concepts - Thermoelasticity.
Springer.
Sayir, M., J. Dual, and S. Kaufmann (2004). Ingenieurmechanik 2 – Deformierbare Körper.
Teubner.
323Sie können auch lesen