GPS-based Online Control and Alarmsystem (GOCA)
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
GPS-based Online Control and Alarmsystem (GOCA) -
Leistungsstandards des GOCA-Systems, praktischer Einsatz am
Beispiel Staumauer Kops (Vorarlberger Illwerke AG, Österreich)
und Weiterentwicklungen
Irene FELDMETH, Reiner JÄGER und Rupert ZISCHINSKY
1 Leistungsstandards des GOCA-Systems
1.1 GOCA-Software und Systemkomponenten
Das GNSS/GPS-basierte Online Control und Alarmssystem GOCA befasst sich mit dem
Einsatz von GNSS/GPS zur Echtzeitüberwachung von Bewegungen der Erdoberfläche
(FELDMETH , JÄGER UND KÄLBER, 2002). Neben dem Einsatz im Naturkatastrophenschutz
ist das fernwartungsfähige GOCA-System auch in der online Überwachung und Alarmie-
rung bei sicherheitsempfindlichen Bauwerken und geotechnischen Anlagen wie z.B. Tal-
sperren einsetzbar. Die in der fernwartungsfähigen GOCA-Zentrale situierte GOCA-De-
formationsanalysesoftware besteht aus einem Satz zentral steuerbarer GPS-Empfänger, die
über Sensorsteuerungs- und Kommunikationssoftware von der sog. GOCA-Zentrale aus,
oder in dezentraler Kommunikation in einem vorzugebenden Zeittakt abgetastet werden.
Derzeit stehen zwei verschiedene Sensorsteuerungs- und Kommunikationssoftwarepakete
(MONITOR/Fa. GeoNav und GOCA-DC3/Fa. Dr. Bertges) zur Verfügung, welche die
GPS-Daten in Form der Baselinevektoren und deren Ko varianzmatrizen im hardware-
neutralen sogenannten GKA-Dateiformat als Schnittstelle zur Weiterverarbeitung mit der
GOCA-Deformationsanalysesoftware bereitstellen. Die GOCA-Deformationsanalysesoft-
ware realisiert auf Basis der GKA-Dateien die statistisch fundierte Weiterverarbeitung der
GPS-Daten in Form einer online Netzausgleichung und einer darauf aufbauenden Defor-
mationsanalyse und Alarmierung.
1.2 GOCA Ausgleichungs- und Deformationsanalysekonzept
Die konzeptionelle Stärke des GOCA-Konzepts beruht darauf, unter Anwendung einer
strengen 3-stufigen Netzausgleichung mit dem Input von GNSS/GPS-Baselines und deren
Kovarianzmatrizen eine statistisch gesicherte klassische Deformationsanalyse online oder
auch im Postprocessing Modus bereitzustellen (JÄGER AND KÄLBER, 2001). Die
Weiterverarbeitung dieser GPS-Daten mit der GOCA-Deformationsanalysesoftware erfolgt
- auf der Basis der o.g. GKA-Daten - im nachfolgenden 3-stufigen Ausgleichungskonzept.
• Stufe 1: Online Initialisierung des dreidimensionalen Referenzpunktrahmens xR
und der zugehörigen Kovarianzmatrix CxR (zu Beginn des GOCA-Monitorings
und bei einer Stabilpunktüberprüfung) in strenger freier Netzausgleichung der
GPS-Baselines im Datum der Referenzpunkte.
• Stufe 2: Fortlaufende online Ausgleichung der GPS-Baselines oder auch Sessions
im GOCA-Array unter dreidimensionaler Georeferenzierung der Objektpunkt-2 I. Feldmeth, R. Jäger und R. Zischinsky
Einzelpositionen xO im Datum der Stabil- bzw. Referenzpunkte xR.
Basis für die an Stufe 2 anknüpfende Stufe 3, der eigentlichen Deformationsanalyse, bilden
die zu jedem Abtastzeitpunkt georeferenzierten Objektpunktpositionen xO und ihre
Kovarianzmatrizen CxO.
• Stufe 3: Deformationsanalyse basierend auf ausgeglichenen Objektpunkt-
positionen mittels Trendschätzungen und Filterungen und Alarm-Management.
Dabei werden wahlweise Kleinste Quadrate oder robuste L1-Norm Schätzungen eingesetzt,
um aus den mit GPS bestimmten „ungenauen“ Einzelpositionen xO die eigentliche Schät-
zung der aktuellen „genauen“ Zustandsgrößen der Objektpunktverschiebung u O , -Ge-
schwindigkeit u& O und -Beschleunigung &u& O durchzuführen. Die Deformationsanalyse bzw.
Stufe 3 umfasst die Algorithmen
• Gleitender Mittelwert zur Deformationsanalyse der Objektpunktverschiebungen,
• Polynom-basierte Trendschätzungen,
• Spline-Schätzungen und
• Kalmanfilterung von Verschiebung, Geschwindigkeit und Beschleunigung,
(JÄGER AND KÄLBER, 2001), welche jeweils sowohl als Kleinste Quadrate Schätzung (L2-
Norm) als auch robuste L1-Norm implementiert sind. Bei einem im online Betrieb laufen-
den Kalman-Filter wird nach jedem Filterschritt die Wahrscheinlichkeit für den vom An-
wender vorgegebenen kritischen Zustand der betreffenden Zustandsgrößen berechnet. Al -
ternativ kann der Alarmzustand auch auf die Online-Filterung der Objektpunktverschiebung
mittels gleitendem Mittelwert unter Vorgabe einer kritischen dreidimensionalen Ver-
schiebung erfolgen. Wird die angegebene Wahrscheinlichkeit für einen kritischen Zustand
überschritten, so erfolgt von GOCA aus die entsprechende nutzerseitig definierte Alar-
mierung, z.B. als Meldung per SMS, als Versenden einer E-Mail an einen Empfänger etc. .
2. GOCA - Erweiterung auf Totalstationssensorik
Die gegenwärtige Weiterentwicklung des GOCA-Systems besteht in der Implementierung
von Totalstationssensorik. Das hardwareneutrale GKA-Format wurde entsprechend bzgl.
Totalstationsbeobachtungen (Schrägstrecken, Zenitdistanzen, Richtungen) erweitert.
Darüber hinaus sind die Erweiterung der Hardwarekommunikations- und Steuerungssoft-
ware zur Ansteuerung von Totalstationen sowie der GOCA-Deformationsanalyse-Software
in Bezug auf die gemeinsame sowie die getrennte Ausgleichung von GPS und
terrestrischen Beobachtungen in o. g. Stufen 1 und 2 erforderlich.
3. Überwachung der Staumauer Kops
3.1 Das Bauwerk und bisherige Überwachungsmethoden
Der Speicher Kops liegt etwa 5 km westlich von Galtür (Österreich). Die Staumauer Kops
wurde in den Jahren 1962-1967 errichtet. Bei der Staumauer handelt es sich um eine
weitgespannte, relativ stark gekrümmte Bogenstaumauer, wobei der Felsrücken an derGPS-based Online Control and Alarmsystem (GOCA) - Leistungsstandards des GOCA-Systems, ... 3
Südflanke durch ein künstliches Widerlager erhöht wurde (Abb. 1). Eine Gewichtsmauer,
die südlich etwa im rechten Winkel an das künstliche Widerlager anschließt, riegelt das
Staubecken im Bereich der seichteren Mulde ab. Die Kronenlänge der Bogenmauer beträgt
400 m, ihre größte Höhe – 122 m, größte Basisbreite – 30 m . Die Talsperrenüberwachung
beruht im wesentlichen auf zwei Säulen:
• die laufende Erfassung, Übertragung und Überprüfung der Messwerte des in der
Staumauer Kops installierten permanent registrierenden Standardinstrumentariums
sowie die in regelmäßigen Abständen erfolgenden klassisch geodätischen
Kontrollmessungen.
• die regelmäßig durchgeführte Begehung durch die Sperrenwärter, welche eine
visuelle Kontrolle der Sperre durchführen und darüber hinaus Kontrollmessungen
bzgl. des Standardinstrumentariums vornehmen.
Die permanent registrierten Daten werden an die zentrale Datensammelstelle des Betreibers
weitergeleitet und graphisch und statistisch verarbeitet. Zu den eingebauten fortlaufend re-
gistrierenden Messinstrumenten gehören die hochgenauen Schwimmlote, welche die Bewe -
gungen der Staumauer in der kritischen West-Ost-Richtung im künstlichen Widerlager und
im Bereich der Mauermitte überwachen. Die Messdatenerfassung erfolgt vollautomatisch.
3.2 GOCA - Monitoring
Ende Mai 2001 wurde das System GOCA für die Dauer von 1 Jahr in Kops installiert.
Dabei befanden sich 3 L1-Empfänger im Einsatz (Abb. 1, 2).
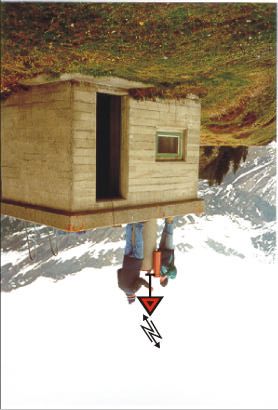
Abb. 1: Staumauer Kops mit GPS-Sensoren im Objekt- Abb. 2: Einrichtung des
bereich (links: GPS-Rover, rechts: GPS-Basisstation) zweiten GPS-Rovers als
( s. auch Farbtafel #, S. # ) Stabil- bzw. Referenz-
punkt( s. auch Farbtafel #,
S. # )4 I. Feldmeth, R. Jäger und R. Zischinsky
Die GPS-Basisstation wurde im Bereich des künstlichen Widerlagers errichtet, ein GPS-
Rover im Bereich der Mauermitte (Abb. 1). Der zweite GPS-Rover erfüllte die Funktion
eines Stabilpunktes (Abb. 2). Die Länge der resultierenden Baselines betrug ca. 198 m und
500 m. Alle zwei Minuten wurden die GPS-Baselinevektoren zwischen Basisstation und
Rovern per Funk von den Empfängern zur GOCA-Zentrale übertragen, die in einem ca.
1 km von der Staumauer entfernten Unterkunftshaus untergebracht wurde. Von dort aus
konnte über Telefonleitung die Fernwartung des GOCA-Systems erfolgen. Die GPS-
Empfänger wurden unzugänglich für den Touristikbetrieb in den Bunkern untergebracht.
3.3 Ergebnisse der GOCA-Deformationsanalyse und Vergleich
Die resultierenden Berechnungen wurden mit den Ergebnissen der Lotungsmessungen ver-
glichen. Abb. 3 zeigt (rot) die aus der GOCA Spline-Trendschätzung hervorgehenden Be -
wegungen senkrecht zur Staumauer im Objektpunkt Mauermitte (Abb. 1) mit einer Über-
einstimmung zwischen Lotung und GPS im Submillimeterbereich. Diese Ergebnisqualität
resultiert auch unter Verwendung des GOCA Kalmanfilters (FELDMETH, JÄGER UND
ZISCHINSKY, 2002). Das Leistungsspektrum von GOCA deckt somit in vollem Umfang das
Anforderungsprofil an eine online 3D-Überwachung sicherheitskritischer Bauwerke ab.
Abb. 3: Vergleich klassische Lotungsmessungen (grün) und GOCA-Spline-Auswertung
(rot) August – September 2000 in Millimeterskala. Wasserstand blau
Dabei kommt der weiteren Flexibilisierung in der GOCA-Systementwicklung auch die
gegenwärtige Einbindung von Totalstationen als zusätzliche Komponente in den netzaus-
gleichungsbasierten Zustands- und Trendschätzungen der GOCA-Software zugute.GPS-based Online Control and Alarmsystem (GOCA) - Leistungsstandards des GOCA-Systems, ... 5 4. Literatur Jäger, R. und S. Kälber (2001): GPS-based Online Control and Alarm System (GOCA). Proceedings Orange, 10th FIG International Symposium on Deformation Measurements. Kalifornien, USA, 19.- 22. März 2001. CD-Rom-Publikation der FIG. Feldmeth, I., Jäger, R. und R. Zischinsky (2002): GPS-based Online Control and Alarmsystem (GOCA) - Leistungsstandards des GOCA-Systems und praktischer Einsatz am Beispiel Kops-Staumauer (Illwerke, Österreich). III. Mittweidaer Talsperrentag. Journal of the University of Applied Sciences Mittweida (1), ISSN 1437-7624. Feldmeth, I., Jäger, R. und S. Kälber (2002): GOCA-Homepage. URL: www.fh-karlsruhe.de/iit/goca .
Sie können auch lesen