EPI4xxx, ERI4xxx Dokumentation | DE
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Dokumentation | DE EPI4xxx, ERI4xxx IO-Link-Box mit 2 analogen Eingängen + 2 analogen Ausgängen 22.09.2020 | Version: 1.2


Inhaltsverzeichnis
Inhaltsverzeichnis
1 Vorwort ....................................................................................................................................................... 5
1.1 Hinweise zur Dokumentation ............................................................................................................. 5
1.2 Sicherheitshinweise ........................................................................................................................... 6
1.3 Ausgabestände der Dokumentation .................................................................................................. 7
2 Produktübersicht ....................................................................................................................................... 8
2.1 Modulübersicht EPI4xxx, ERI4xxx..................................................................................................... 8
2.2 EPI4374-0002, ERI4374-0002 .......................................................................................................... 9
2.2.1 Einführung ......................................................................................................................... 9
2.2.2 Technische Daten............................................................................................................ 10
2.2.3 Prozessabbild .................................................................................................................. 11
3 Grundlagen IO-Link ................................................................................................................................. 12
3.1 IO Link Systemaufbau ..................................................................................................................... 12
3.2 Aufbau IO Link Kommunikation ....................................................................................................... 14
3.3 Gerätebeschreibung IODD .............................................................................................................. 15
3.4 Parameterserver .............................................................................................................................. 15
3.5 Übertragungsgeschwindigkeit ......................................................................................................... 16
4 Montage und Anschluss ......................................................................................................................... 17
4.1 Montage........................................................................................................................................... 17
4.1.1 Abmessungen.................................................................................................................. 17
4.1.2 Befestigung...................................................................................................................... 18
4.1.3 Anzugsmomente für Steckverbinder................................................................................ 19
4.2 IO-Link Anschluss............................................................................................................................ 20
4.2.1 Anschluss IO-Link Master................................................................................................ 20
4.2.2 Anschluss IO-Link Device................................................................................................ 23
4.2.3 IO-Link Device Status LED .............................................................................................. 23
4.3 Status-LEDs für die Spannungsversorgung .................................................................................... 23
4.4 Signalanschluss............................................................................................................................... 24
4.5 UL-Anforderungen ........................................................................................................................... 25
4.6 Verkabelung .................................................................................................................................... 26
5 Inbetriebnahme/Konfiguration IO-Link Master/Device......................................................................... 27
5.1 IO-Link Master ................................................................................................................................. 27
5.1.1 Konfigurationserstellung TwinCAT - Manuell (Master) .................................................... 27
5.1.2 Konfigurationserstellung TwinCAT - Online scan (Master).............................................. 33
5.1.3 Konfiguration mit TwinCAT - Erläuterung Karteireiter...................................................... 40
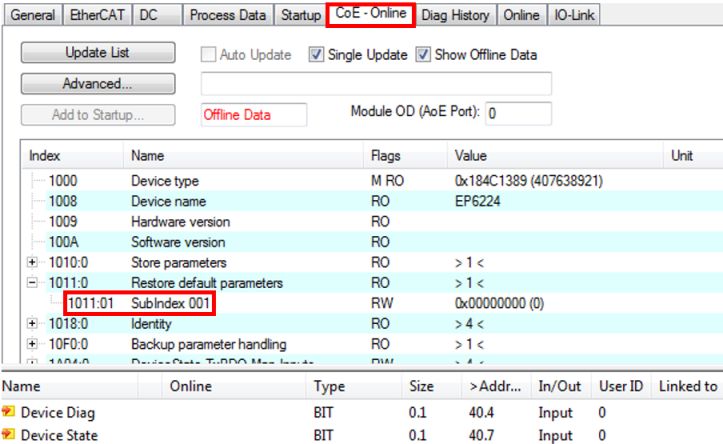
5.1.4 Wiederherstellen des Auslieferungszustandes von einem EtherCAT-Gerät ................... 49
5.2 Zugriff auf IO-Link Parameter .......................................................................................................... 49
5.3 IO-Link Device ................................................................................................................................. 52
5.3.1 Konfiguration der IO-Link Devices ................................................................................... 52
5.3.2 EPI43xx, ERI43xx - Prozessdaten................................................................................... 62
5.3.3 Einstellungen (Settings) der IO-Link Devices .................................................................. 64
5.3.4 Datenstrom und Korrekturberechnung ............................................................................ 66
5.3.5 EPIxxxx, ERIxxxx - Einstellen der IO-Link Device Parameter ......................................... 69
5.3.6 EPI43xx, ERI43xx - Einstellen der IO-Link Device Parameter ........................................ 74
EPI4xxx, ERI4xxx Version: 1.2 3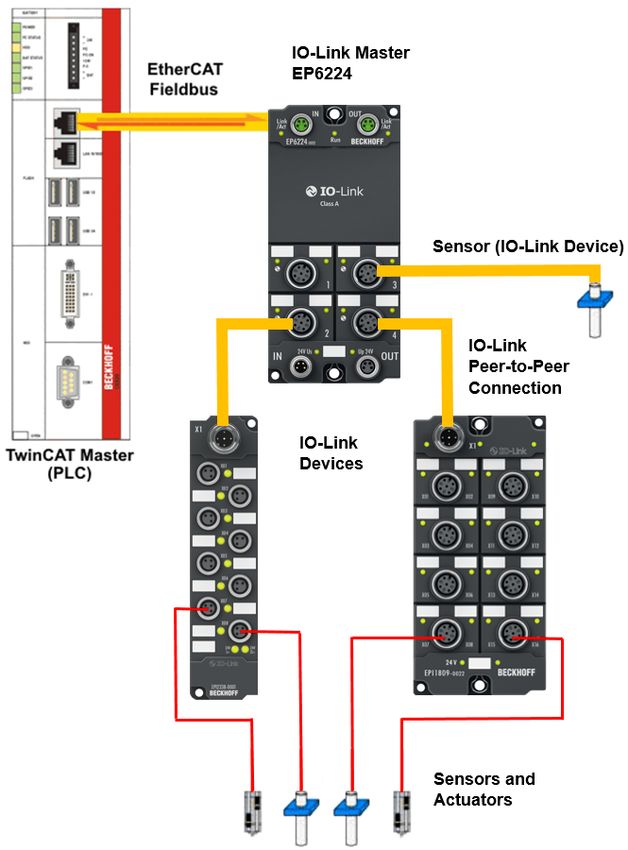
Inhaltsverzeichnis
5.3.7 Objektübersicht - EPI4374-0002...................................................................................... 79
5.3.8 EPI4374-0002, ERI4374-0002 - Objektbeschreibung und Parametrierung..................... 83
5.3.9 Firmware Update des IO-Link Devices ............................................................................ 91
6 Anhang ..................................................................................................................................................... 94
6.1 Allgemeine Betriebsbedingungen .................................................................................................... 94
6.2 Zubehör ........................................................................................................................................... 95
6.3 Support und Service ........................................................................................................................ 96
4 Version: 1.2 EPI4xxx, ERI4xxx
Vorwort 1 Vorwort 1.1 Hinweise zur Dokumentation Zielgruppe Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs- und Automatisierungstechnik, das mit den geltenden nationalen Normen vertraut ist. Zur Installation und Inbetriebnahme der Komponenten ist die Beachtung der Dokumentation und der nachfolgenden Hinweise und Erklärungen unbedingt notwendig. Das Fachpersonal ist verpflichtet, für jede Installation und Inbetriebnahme die zu dem betreffenden Zeitpunkt veröffentlichte Dokumentation zu verwenden. Das Fachpersonal hat sicherzustellen, dass die Anwendung bzw. der Einsatz der beschriebenen Produkte alle Sicherheitsanforderungen, einschließlich sämtlicher anwendbaren Gesetze, Vorschriften, Bestimmungen und Normen erfüllt. Disclaimer Diese Dokumentation wurde sorgfältig erstellt. Die beschriebenen Produkte werden jedoch ständig weiter entwickelt. Wir behalten uns das Recht vor, die Dokumentation jederzeit und ohne Ankündigung zu überarbeiten und zu ändern. Aus den Angaben, Abbildungen und Beschreibungen in dieser Dokumentation können keine Ansprüche auf Änderung bereits gelieferter Produkte geltend gemacht werden. Marken Beckhoff®, TwinCAT®, EtherCAT®, EtherCAT G®, EtherCAT G10®, EtherCAT P®, Safety over EtherCAT®, TwinSAFE®, XFC®, XTS® und XPlanar® sind eingetragene und lizenzierte Marken der Beckhoff Automation GmbH. Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch Dritte kann zu einer Verletzung von Rechten der Inhaber der entsprechenden Bezeichnungen führen. Patente Die EtherCAT-Technologie ist patentrechtlich geschützt, insbesondere durch folgende Anmeldungen und Patente: EP1590927, EP1789857, EP1456722, EP2137893, DE102015105702 mit den entsprechenden Anmeldungen und Eintragungen in verschiedenen anderen Ländern. EtherCAT® ist eine eingetragene Marke und patentierte Technologie lizenziert durch die Beckhoff Automation GmbH, Deutschland. Copyright © Beckhoff Automation GmbH & Co. KG, Deutschland. Weitergabe sowie Vervielfältigung dieses Dokuments, Verwertung und Mitteilung seines Inhalts sind verboten, soweit nicht ausdrücklich gestattet. Zuwiderhandlungen verpflichten zu Schadenersatz. Alle Rechte für den Fall der Patent-, Gebrauchsmuster- oder Geschmacksmustereintragung vorbehalten. EPI4xxx, ERI4xxx Version: 1.2 5
Vorwort
1.2 Sicherheitshinweise
Sicherheitsbestimmungen
Beachten Sie die folgenden Sicherheitshinweise und Erklärungen!
Produktspezifische Sicherheitshinweise finden Sie auf den folgenden Seiten oder in den Bereichen Montage,
Verdrahtung, Inbetriebnahme usw.
Haftungsausschluss
Die gesamten Komponenten werden je nach Anwendungsbestimmungen in bestimmten Hard- und Software-
Konfigurationen ausgeliefert. Änderungen der Hard- oder Software-Konfiguration, die über die
dokumentierten Möglichkeiten hinausgehen, sind unzulässig und bewirken den Haftungsausschluss der
Beckhoff Automation GmbH & Co. KG.
Qualifikation des Personals
Diese Beschreibung wendet sich ausschließlich an ausgebildetes Fachpersonal der Steuerungs-,
Automatisierungs- und Antriebstechnik, das mit den geltenden Normen vertraut ist.
Erklärung der Hinweise
In der vorliegenden Dokumentation werden die folgenden Hinweise verwendet.
Diese Hinweise sind aufmerksam zu lesen und unbedingt zu befolgen!
GEFAHR
Akute Verletzungsgefahr!
Wenn dieser Sicherheitshinweis nicht beachtet wird, besteht unmittelbare Gefahr für Leben und Gesundheit
von Personen!
WARNUNG
Verletzungsgefahr!
Wenn dieser Sicherheitshinweis nicht beachtet wird, besteht Gefahr für Leben und Gesundheit von Perso-
nen!
VORSICHT
Schädigung von Personen!
Wenn dieser Sicherheitshinweis nicht beachtet wird, können Personen geschädigt werden!
HINWEIS
Schädigung von Umwelt/Geräten oder Datenverlust
Wenn dieser Hinweis nicht beachtet wird, können Umweltschäden, Gerätebeschädigungen oder Datenver-
lust entstehen.
Tipp oder Fingerzeig
Dieses Symbol kennzeichnet Informationen, die zum besseren Verständnis beitragen.
6 Version: 1.2 EPI4xxx, ERI4xxx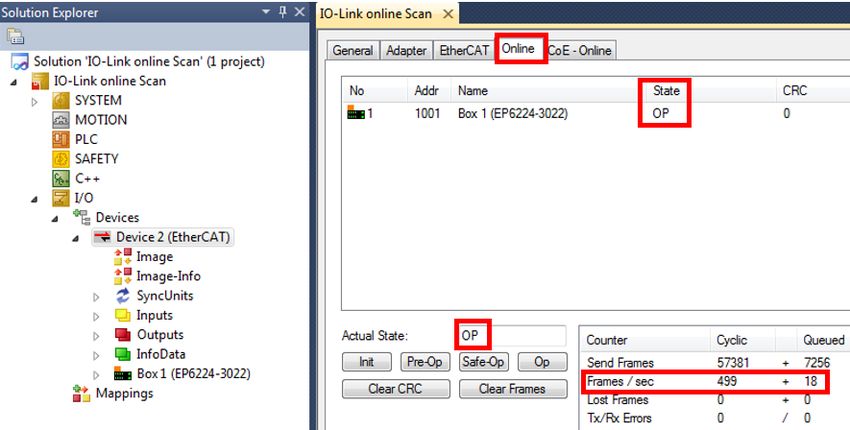
Vorwort 1.3 Ausgabestände der Dokumentation Version Kommentar 1.2 • Titelseite aktualisiert 1.1 • Kapitel "Prozessdaten" eingefügt 1.0 • Erste Veröffentlichung 0.5 • Erste vorläufige Version Firm- und Hardware-Stände Diese Dokumentation bezieht sich auf den zum Zeitpunkt ihrer Erstellung gültigen Firm- und Hardware- Stand. Die Eigenschaften der Module werden stetig weiterentwickelt und verbessert. Module älteren Fertigungsstandes können nicht die gleichen Eigenschaften haben, wie Module neuen Standes. Bestehende Eigenschaften bleiben jedoch erhalten und werden nicht geändert, so das ältere Module immer durch neue ersetzt werden können. Den Firm- und Hardware-Stand (Auslieferungszustand) können Sie der auf der Seite der IO-Link-Box aufgedruckten Batch-Nummer (D-Nummer) entnehmen. Syntax der Batch-Nummer (D-Nummer) D: WW YY FF HH Beispiel mit D-Nr. 29 10 02 01: WW - Produktionswoche (Kalenderwoche) 29 - Produktionswoche 29 YY - Produktionsjahr 10 - Produktionsjahr 2010 FF - Firmware-Stand 02 - Firmware-Stand 02 HH - Hardware-Stand 01 - Hardware-Stand 01 EPI4xxx, ERI4xxx Version: 1.2 7
Produktübersicht
2 Produktübersicht
2.1 Modulübersicht EPI4xxx, ERI4xxx
Modul Anzahl analoger Signal- Gehäuse Kommentar
Eingänge Ausgänge anschluss
EPI4374-0002 2 2 4 x M12 Industriegehäuse zwei konfigurierbare analoge Eingänge und
zwei konfigurierbare analoge Ausgänge
ERI4374-0002 2 2 4 x M12 Zink-Druckguss-Gehäuse zwei konfigurierbare analoge Eingänge und
zwei konfigurierbare analoge Ausgänge
8 Version: 1.2 EPI4xxx, ERI4xxx
Produktübersicht 2.2 EPI4374-0002, ERI4374-0002 2.2.1 Einführung IO-Link Box mit zwei konfigurierbaren, analogen Ein- und zwei konfigurierbaren, analogen Ausgängen Die IO-Link Boxen EPI4374-0002 und ERI4374-0002 verfügen über zwei analoge Eingänge und zwei analoge Ausgänge, die einzeln parametriert werden können. Es können Signale im Bereich von -10 V bis +10 V oder im Bereich von 0/4…20 mA verarbeitet bzw. erzeugt werden. Die Auflösung der Stromsignale erfolgt mit 16 Bit, die der Spannungssignale ebenfalls mit 16 Bit, vorzeichenbehaftet. Bei den Ausgängen wird die Spannung bzw. der Ausgangsstrom mit einer Auflösung von 15 Bit (Default) galvanisch getrennt zur Prozessebene gespeist. Die zwei Ausgangskanäle besitzen ein gemeinsames Massepotenzial mit der Versorgung 24 VDC. Die IO-Link-Box-Module im Zinkdruckguss-Gehäuse (ERI) können in extrem schwieriger Industrie- und Prozessumgebung eingesetzt werden. Durch den Vollverguss und die Metalloberfläche ist die ERI-Serie ideal bei erhöhten Erfordernissen an Belastbarkeit und Beständigkeit beispielsweise gegen Schweißspritzer. Quick-Links Installation [} 17] EPI4xxx, ERI4xxx Version: 1.2 9
Produktübersicht
2.2.2 Technische Daten
Technische Daten EPI4374-0002 ERI4374-0002
Kommunikation IO-Link
Datenübertragungsrate 230,4 kBaud (COM 3)
IO-Link-Anschluss 1 x M12 Stecker, a-kodiert
Spezifikationsversion IO-Link V1.1, Class B
Anforderungen IO-Link Master V1.1
Anzahl Eingänge 2
Anschluss Eingänge [} 24] M12-Buchsen
Signaltyp Eingänge Konfigurierbar:
0 V…+10 V
-10 V…+10 V
0 mA…20 mA
4 mA…20 mA
Eingangswiderstand Eingänge > 200 kΩ oder 85 Ω typ. + Diodenspannung
Auflösung Eingänge 16 Bit (inkl. Vorzeichen)
Grenzfrequenz Eingangsfilter 5 kHz
Wandlungszeit Eingänge ~100 µs
Messfehler Eingänge < 0,1 % (bezogen auf den Messbereichsendwert)
Anzahl Ausgänge 2
Anschluss Ausgänge [} 24] M12-Buchsen
Signaltyp Ausgänge Konfigurierbar:
0 V…+10 V
-10 V…+10 V
0 mA…20 mA
4 mA…20 mA
Bürde Ausgänge > 5 kΩ | < 500 Ω
Auflösung Ausgänge 15 Bit
Wandlungszeit Ausgänge ca. 40 µs
Messfehler Ausgänge < 0,1 % (bezogen auf den Messbereichsendwert)
Besondere Eigenschaften Kombi-Modul, Strom oder Spannung je Kanal parametrierbar
Stromaufnahme der Modulelek- typisch 100 mA from L+
tronik
Versorgung der Modulelektronik L+
Versorgung der Sensoren 2L+
Versorgung der Aktoren 2L+
Prozessabbild Eingänge: 2 x 16 Bit
Ausgänge: 2 x 16 Bit
Potenzialtrennung L+/2L+: ja
Gehäuse Industriegehäuse (Kunststoff PA6) Zinkdruckguss
Gewicht Typ.. 165 g Typ. 250 g
Zulässige Umgebungstempera- -25°C ... +60°C
tur im Betrieb
Zulässige Umgebungstempera- -40°C ... +85°C
tur bei Lagerung
Vibrations- / Schockfestigkeit gemäß EN 60068-2-6 / EN 60068-2-27
EMV-Festigkeit / Aussendung gemäß EN 61000-6-2 / EN 61000-6-4
Schutzart IP65, IP66, IP67 (gemäß EN 60529)
Beachten sie hierzu auch das Kapitel Allgemeine Betriebsbedingungen [} 94]
Einbaulage beliebig
Zulassungen CE, UL
10 Version: 1.2 EPI4xxx, ERI4xxxProduktübersicht
2.2.3 Prozessabbild
Channel 1 Status und Channel 1 Value
Das IO-Link Device ist an IO-Link Port2 des IO-Link Masters (EP6224-2022) angeschlossen.
• Unter Channel 1 Status finden Sie die Statusinformationen (16 Bit) des 1. Analogen Eingangskanals.
Hier als Beispiel das Prozessabbild der EPI4374-0002.
• Unter Channel 1 In Value finden Sie den Analogwert (16 Bit) des 1. Analogen Eingangskanals.
• Channel 2
Die Daten des 2. analogen Eingangskanals sind genauso aufgebaut, wie die des 1. Kanals.
Abb. 1: EPI4374-0002 - Prozessabbild in der Baumansicht
Underrange: Wert des analogen Eingangs ist kleiner als 0/4mA bzw. -10/0V
Overrange: Wert des analogen Eingangs ist größer als 20mA bzw. +10V
Limit 1 / Limit 2: bei aktiviertem Limit 1 (Objekt 80x0:07 = 1 )/ Limit 2 (Objekt 80x0:08 = 1) bedeutet
1: Wert < Limit 1 (eingestellt in Objekt 0x80x0:13) / Limit 2 (eingestellt in Objekt 0x80x0:14)
2: Wert > Limit 1 (eingestellt in Objekt 0x80x0:13) / Limit 2 (eingestellt in Objekt 0x80x0:14)
3: Wert = Limit 1 (eingestellt in Objekt 0x80x0:13) / Limit 2 (eingestellt in Objekt 0x80x0:14)
Error: Dieses Bit wird gesetzt wenn Over- oder Underrange erkannt wurde.
Channel 3 Out Value, Channel 4 Out Value
• Unter Channel 3 Out Value und Channel 4 Out Value finden Sie die Daten der beiden analogen
Ausgangskanäle (Kanal 3 und Kanal 4)
Sehen Sie dazu auch
2 EPI43xx, ERI43xx - Prozessdaten [} 62]
EPI4xxx, ERI4xxx Version: 1.2 11Grundlagen IO-Link
3 Grundlagen IO-Link
IO-Link stellt ein Kommunikationssystem zur Anbindung intelligenter Sensoren und Aktoren an ein
Automatisierungssystem in der Norm IEC 61131-9 unter der Bezeichnung "Single-drop digital
communication interface for small sensors and actuators" (SDCI) dar.
Sowohl die elektrischen Anschlussdaten als auch das Kommunikationsprotokoll sind standardisiert und in
der IO-Link Spezifikation zusammengefasst.
Spezifikation IO-Link
Die Entwicklung der EP6224-xxxx unterlag der IO-Link Spezifikation 1.1. Zum Zeitpunkt der Erstel-
lung dieser Dokumentation geht die IO-Link Spezifikation in die IEC-Normung ein und wird als
IEC 61131-9 in erweiterter Form übernommen. Dabei wird auch die neue Bezeichnung SDCI einge-
führt. Beckhoff unterstützt als Teilnehmer in den entsprechenden Gremien die Entwicklung von IO-
Link und bildet Spezifikationsänderungen in seinen Produkten ab.
3.1 IO Link Systemaufbau
Ein IO-Link System besteht aus einem IO-Link Master, einem oder mehreren IO-Link Devices und Sensoren
oder Aktoren. Der IO-Link Master stellt die Schnittstelle zur überlagerten Steuerung zur Verfügung und
steuert die Kommunikation mit den angeschlossenen IO-Link Devices. Das Beckhoff IO-Link Mastermodul
EP6224-xxxx besitzt vier IO-Link-Ports, an dem je ein IO-Link-Device angeschlossen werden kann. IO-Link
stellt daher keinen Feldbus dar, sondern ist eine Peer-to-Peer Verbindung (siehe nachfolgende Abbildung).
12 Version: 1.2 EPI4xxx, ERI4xxxGrundlagen IO-Link
Abb. 2: IO-Link Übersicht: Peer-to-Peer Kommunikation
Die angeschlossenen IO-Link Devices besitzen individuelle Parameterinformationen, die während des
automatischen Scannens mit TwinCAT erkannt und im System Manager übernommen werden (vgl. Kapitel
"Grundlagen zur Funktion“, Einbinden der IO-Link Devices). Offline können modulspezifische Informationen
in Form einer IO-Link Device Description (IODD) eingelesen und in TwinCAT übernommen werden.
• Wie Sie manuell (physisch nicht vorhandene) IO-Link Master und Devices in TwinCAT konfigurieren ist
unter den beiden folgenden Links beschrieben: Konfigurationserstellung TwinCAT - Manuell (Master)
[} 27], 1. Importieren der Gerätebeschreibung IODD [} 55]
EPI4xxx, ERI4xxx Version: 1.2 13Grundlagen IO-Link
• Wie Sie physisch vorhandene IO-Link Master und Devices in TwinCAT konfigurieren ist unter den
beiden folgenden Links beschrieben: Konfigurationserstellung TwinCAT - Online scan (Master) [} 33],
2. Automatisches Scannen der IO-Link Ports [} 57]
3.2 Aufbau IO Link Kommunikation
Aufbau IO-Link Kommunikation
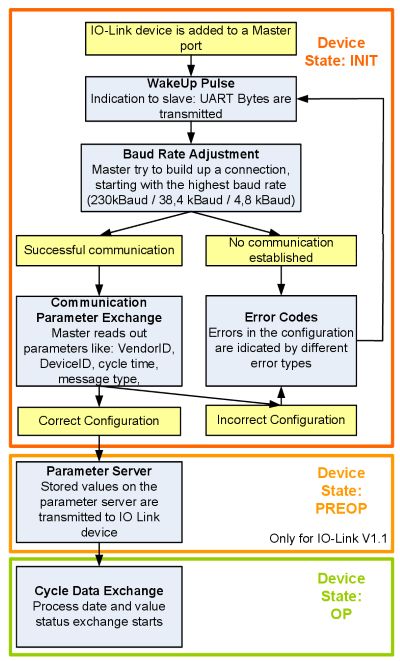
Der Aufbau der IO-Link Kommunikation ist in Abb. Aufbau IO-Link Kommunikation dargestellt. Dieser stellt
insbesondere den Ablauf beim automatischen Scannen [} 57] der IO-Link Ports dar.
Abb. 3: Aufbau IO-Link Kommunikation
• Ist ein IO-Link Device an einem Masterport angeschlossen, so versucht der Master eine
Kommunikation aufzubauen. Durch einen definierten Signalpegel, den WakeUp-Impuls, wird dem
Slave signalisiert, dass ab jetzt UART-Bytes gesendet werden.
Alle Daten werden vom IO-Link Slave ab da als UART-Bytes interpretiert.
• Der Master geht alle Baudraten [} 16] durch, angefangen bei der schnellsten Baudrate (COM3 =
230kBaud). Eine erfolgreiche Verbindung wird aufgebaut, wenn sich der Slave auf den WakeUp Impuls
meldet.
• Zunächst liest der Master die Grundparameter aus (Vendor ID, Device ID, Prozessdatenlänge,
Telegrammtyp und Zykluszeit) und vergleicht diese mit der vorliegenden Konfiguration.
• Konnte keine Verbindung zum Slave aufgebaut werden oder unterscheiden sich die hinterlegten
Parameter von den ausgelesenen, so werden entsprechende Fehler ausgegeben.
14 Version: 1.2 EPI4xxx, ERI4xxxGrundlagen IO-Link
• Stimmen die hinterlegten mit den ausgelesenen Parametern überein, so wechselt das IO-Link Device
in den PREOP Status.
Handelt es sich um ein IO-Link Device der Spezifikation V1.1 wird nun der Parameterserver [} 15]
ausgeführt. Handelt es sich im ein IO-Link Device nach V1.0 wird dieser Schritt ausgelassen und direkt
in OP geschaltet.
• Zuletzt wird die Zykluszeit geschrieben und das Device in OP geschaltet. Danach ist der Master im
Zyklischen Datenaustausch mit dem Slave.
3.3 Gerätebeschreibung IODD
IO-Link-Geräte besitzen individuelle Systeminformationen in Form einer IO Device Description (IODD), diese
enthält:
• Kommunikationseigenschaften
• Geräteparameter mit Wertebereich und Defaultwerten
• Identifikation-, Prozess- und Diagnosedaten
• Gerätedaten
• Textbeschreibung
• Bild des Gerätes
• Logo des Herstellers
Ist die IODD importiert, so werden während des automatischen Scannens [} 57] mit TwinCAT die
Gerätedaten erkannt und im System Manager übernommen (vgl. Einbinden der IO-Link Devices).
3.4 Parameterserver
Um die Funktionalität des Parameterservers nutzen zu können, müssen sowohl der IO-Link Master, als auch
das IO-Link Device nach V1.1 spezifiziert sein. Die IO-Link Revision des Devices kann für den einzelnen
Port unter Settings [} 64] ausgelesen werden. Der Beckhoff IO-Link Master unterstützt die Spezifikation
V1.1 ab FW 07.
• Der Parameterserver im IO-Link-Master enthält Parameterdaten die im IO-Link-Devices gespeichert
sind. Die Speicherkapazität beträgt max. 2 kByte (inklusive Header).
Wird das IO-Link-Device getauscht, so werden die Daten aus dem Parameterserver auf das neue
Gerät geladen. Voraussetzung ist, dass es sich um den gleichen Gerätetyp handelt (VendorID &
DeviceID müssen übereinstimmen).
• Wird ein neues IO-Link-Device konfiguriert, so lädt beim ersten Start der IO-Link Master die Parameter
aus dem IO-Link-Device in den Parameterserver.
Bereits konfigurierte Daten anderer IO-Link-Devices (VendorID & DeviceID stimmen mit dem
konfigurierten Gerät nicht überein) werden überschrieben.
• Bei jedem weiteren Start prüft der IO-Link Master mit Hilfe einer Checksumme, ob die Daten im
Parameterserver mit denen auf dem IO-Link-Device übereinstimmen und macht ggfs. ein Download
auf das Device.
• Ändern sich Parameter während der Laufzeit des Gerätes, so kann dies über ein spezielles Event dem
Master gemeldet werden. Der Master startet daraufhin den Parameterserver mit einem Upload.
• Das Event wird standardmäßig nicht bei jedem Parameterschreiben gesetzt, daher ist das Ende des
Parametriervorgangs dem IO-Link Device zu melden.
Daraufhin sendet das IO-Link-Device das entsprechende Event an den Master. Die Daten werden in
den Parameterserver geladen.
• Beim vorprogrammierten IO-Link-Device findet kein Download aus dem Parameterserver auf das
Device statt.
EPI4xxx, ERI4xxx Version: 1.2 15Grundlagen IO-Link
3.5 Übertragungsgeschwindigkeit
Ein IO-Link Master nach Spezifikation V1.1 unterstützt alle drei Übertragungsarten, er passt die
Übertragungsrate automatisch an die des IO-Link Devices an.
Ein IO-Link Device unterstützt i.d.R. nur eine Übertragungsrate. Auf den verschiedenen Ports des Masters
können IO-Link Devices mit unterschiedlichen Übertragungsraten angeschlossen werden.
• COM1 = 4,8 kBaud
• COM2 = 38,4 kBaud
• COM3 = 230,4 kBaud
16 Version: 1.2 EPI4xxx, ERI4xxxMontage und Anschluss
4 Montage und Anschluss
4.1 Montage
4.1.1 Abmessungen
26.5 30 60
13,5 23
119
126
117
Ø 3,5 Ø 4,5 126
Abb. 4: Abmessungen
Alle Maße sind in Millimeter angegeben.
Gehäuseeigenschaften
IO-Link-Box-Module Schmales Gehäuse Breites Gehäuse
Gehäusematerial EPIxxxx: PA6 (Polyamid)
ERIxxxx: Zink-Druckguss
Vergussmasse Polyurethan
Montage zwei Befestigungslöcher Ø 3 mm für zwei Befestigungslöcher Ø 4,5 mm für
M3 M4
Metallteile Messing, vernickelt
Kontakte CuZn, vergoldet
Einbaulage beliebig
Schutzart im verschraubten Zustand IP65, IP66, IP67 (gemäß EN 60529)
Abmessungen (H x B x T) ca. 126 x 30 x 26,5 mm ca. 126 x 60 x 26,5 mm
Gewicht ca. 125 g, je nach Modultyp ca. 250 g, je nach Modultyp
EPI4xxx, ERI4xxx Version: 1.2 17Montage und Anschluss
4.1.2 Befestigung
Anschlüsse vor Verschmutzung schützen!
Schützen Sie während der Montage der Module alle Anschlüsse vor Verschmutzung! Die Schutzart
IP65 ist nur gewährleistet, wenn alle Kabel und Stecker angeschlossen sind! Nicht benutzte An-
schlüsse müssen mit den entsprechenden Steckern geschützt werden! Steckersets siehe Katalog.
Module mit schmalem Gehäuse werden mit zwei M3-Schrauben montiert.
Module mit breitem Gehäuse werden mit zwei M3-Schrauben an den in den Ecken angeordneten oder mit
zwei M4-Schrauben an den zentriert angeordneten Befestigungslöchern montiert.
Die Schrauben müssen länger als 15 mm sein. Die Befestigungslöcher der Module besitzen kein Gewinde.
Beachten Sie bei der Montage, dass die Feldbusanschlüsse die Gesamthöhe noch vergrößert. Siehe Kapitel
Zubehör.
Montageschiene ZS5300-0001
Die Montageschiene ZS5300-0001 (500 mm x 129 mm) ermöglicht einen zeitsparenden Aufbau der Module.
Die Schiene besteht aus rostfreiem Stahl (V2A), ist 1,5 mm stark mit passend vorgefertigten M3-Gewinden.
Die Schiene hat 5,3 mm Langlöcher um sie mit M5-Schrauben an der Maschine zu befestigen.
Abb. 5: Montageschiene ZS5300-0001
Die Montageschiene ist 500 mm lang und erlaubt bei einem Modulabstand von 2 mm die Montage von 15
schmalen Modulen. Sie kann applikationsspezifisch gekürzt werden.
Montageschiene ZS5300-0011
Die Montageschiene ZS5300-0011 (500 mm x 129 mm) bietet neben den M3- auch vorgefertigte M4-
Gewinde zur Befestigung der 60 mm breiten Module über deren mittlere Bohrungen.
Bis zu 14 schmale oder 7 breite Module können gemischt montiert werden.
18 Version: 1.2 EPI4xxx, ERI4xxxMontage und Anschluss
4.1.3 Anzugsmomente für Steckverbinder
M8-Steckverbinder
Es wird empfohlen die M8-Steckverbinder mit einem Drehmoment von 0,4 Nm festzuziehen.
Abb. 6: IO-Link Box mit M8- und M12- Steckverbindern
M12-Steckverbinder
Es wird empfohlen die M12-Steckverbinder mit einem Drehmoment von 0,6 Nm festzuziehen.
Abb. 7: IO-Link Box mit M12-Steckverbindern
Drehmomentschlüssel
Abb. 8: Drehmomentschlüssel, ZB8801
Korrektes Drehmoment sicherstellen
Verwenden Sie die von Beckhoff lieferbaren Drehmomentschlüssel um die Steckverbinder festzu-
ziehen! Diesen finden Sie unter dem nachfolgenden Link.
IP67 Box - Zubehör
EPI4xxx, ERI4xxx Version: 1.2 19Montage und Anschluss 4.2 IO-Link Anschluss 4.2.1 Anschluss IO-Link Master IO-Link Schnittstelle In der IO-Link-Spezifikation sind verschiedene IO-Link-Anschlussbelegungen festgelegt, auf die im nachfolgenden Teil eingegangen wird. Die Schalt- und Kommunikationsleitung ist mit (C/Q) gekennzeichnet. Port Class A (Typ A): Die Funktion von Pin 2 und Pin 5 ist nicht vorgegeben. Der Hersteller kann Pin 2 mit einem zusätzlichen Digitalkanal belegen. Port Class B (Typ B): Pin 2 und Pin 5 werden für eine zusätzliche Spannungsversorgung genutzt. Die Informationen zu der Anschlussbelegung Ihres Modules finden Sie in dem Kapitel „Einführung“. Abb. 9: Anschlussbelegung Port Class A, Pin 2 nicht belegt Bei Class A-Modulen kann der Pin 2 mit einem zusätzlichen digitalen Eingang bzw. Ausgang (I/Q) belegt sein. Abb. 10: Anschlussbelegung Port Class A, Pin 2 belegt Port Class B (Typ B): Für Devices mit erhöhtem Strombedarf wird über Pin 2 und Pin 5 eine zusätzliche Spannungsversorgung zur Verfügung gestellt. 20 Version: 1.2 EPI4xxx, ERI4xxx
Montage und Anschluss Abb. 11: Anschlussbelegung Port Class B Für den abgehenden IO-Link-Anschluss verfügt der IO-Link Master (EP622x-xxxx) über eine A-kodierte M12- Buchse. Abb. 12: IO-Link-Anschluss, Master Aderfarben Die Aderfarben des IO-Link Kabels mit der dazugehörigen Pin-Belegung des IO-Link Steckverbinders: Pin Aderfarbe 1 braun 2 weiß 3 blau 4 schwarz 5 grau IO-Link-Kabel Abb. 13: Beispiel IO-Link Kabel: Stecker auf Buchse Die von Beckhoff lieferbaren Kabel für das IO-Link-System finden Sie unter dem folgenden Link unter dem Punkt „Zubehör“: https://beckhoff.de/german/fieldbus_components_accessories/m12_sensor_5w.htm? id=51657421126830456 EPI4xxx, ERI4xxx Version: 1.2 21
Montage und Anschluss
IO-Link Kabel
Für Class A Master/Devices von Beckhoff kann ein 3-adriges IO-Link Kabel ausreichend sein. Ein
Class B Master/Device benötigt ein 5-adriges IO-Link Kabel.
22 Version: 1.2 EPI4xxx, ERI4xxxMontage und Anschluss
4.2.2 Anschluss IO-Link Device
Für den ankommenden IO-Link-Anschluss verfügt die IO-Link Box (EPIxxxx, ERIxxxx) über einen A-
kodierten M12-Stecker.
IO-Link-Anschluss, Device (schmales Gehäuse) IO-Link-Anschluss, Device (breites Gehäuse)
4.2.3 IO-Link Device Status LED
IO-Link Device Status LED (schmales Gehäuse) IO-Link Device Status LED (breites Gehäuse)
LED-Anzeige
LED Anzeige Bedeutung
IO-Link Status LED (X1) aus IO-Link Kommunikation nicht aktiv
Blinkt grün (1Hz) IO-Link Kommunikation aktiv
Leuchtet rot Kurzschluss auf C/Q Leitung oder Überhitzung
4.3 Status-LEDs für die Spannungsversorgung
Das IO-Link Modul enthält 2 Diagnose LEDs für die Spannungsversorgung sowie ein Diagnose Objekt
(0x0A00) zur genaueren Diagnose. Die Beschreibung der Diagnose Parameter (Index 0x0A00 [} 90]) ist im
Abschnitt Objektbeschreibung und Parametrierung beschrieben.
Abb. 14: Status-LEDs für die Spannungsversorgung
LED-Anzeigen
LED Anzeige Bedeutung
24 V aus Spannung L+ nicht vorhanden
grün Spannung L+ OK
rot Spannung L+ zu gering
rechte LED grün Spannung 2L+ OK
aus Spannung 2L+ zu gering, Kurzschluss
EPI4xxx, ERI4xxx Version: 1.2 23Montage und Anschluss 4.4 Signalanschluss Analoge Eingänge M12 Ein Eingang pro Buchse: 0 bis 10 V oder -10 bis 10 V bzw. 0 bis 20 mA oder 4 bis 20 mA Abb. 15: Pinbelegung, analoge Eingänge M12 Der Sensor wird über Input+ und Input- angeschlossen. Optional kann der Sensor noch mit 24 VDC betrieben/ versorgt werden. Analoge Ausgänge M12 Ein Ausgang pro Buchse: 0 bis 10 V oder -10 bis 10 V bzw. 0 bis 20 mA oder 4 bis 20 mA Abb. 16: Pinbelegung, analoge Ausgänge M12 Der Aktor wird über Output +/- und Output GND angeschlossen. Optional kann der Aktor noch mit 24 VDC betrieben/versorgt werden. Status LEDs an M12-Anschlüssen (Eingänge und Ausgänge) Abb. 17: EPIxxxx-0002 - LEDs, Signalanschluss 24 Version: 1.2 EPI4xxx, ERI4xxx
Montage und Anschluss
Status-LEDs an den M12-Anschlüssen 1 und 2 (Eingänge)
Anschluss LED Anzeige Bedeutung
M12-Buchse 1 und 2 R links aus keine Datenübertragung zum A/D-Wandler
grün Datenübertragung zum A/D-Wandler
E rechts aus einwandfreie Funktion
rot Fehler: Drahtbruch oder Messwert außerhalb des Messbereichs (kleiner als
3,5 mV/-11 V oder größer als 21 mA/11 V)
Eine einwandfreie Funktion besteht wenn die grüne LED „Run“ leuchtet und die rote LED „Error“ aus ist.
Status-LEDs an den M12-Anschlüssen 3 und 4 (Ausgänge)
Anschluss LED Anzeige Bedeutung
M12-Buchse 3 und 4 R links aus Keine Datenübertragung zum D/A-Wandler
grün Datenübertragung zum D/A-Wandler
4.5 UL-Anforderungen
Die Installation der nach UL zertifizierten IP67 Box Module muss den folgenden Anforderungen entsprechen.
Versorgungsspannung
VORSICHT
VORSICHT!
• von einer isolierten, mit einer Sicherung (entsprechend UL248) von maximal 4 A geschützten Quelle,
oder
• von einer Spannungsquelle die NEC class 2 entspricht stammt.
Eine Spannungsquelle entsprechend NEC class 2 darf nicht seriell oder parallel mit einer anderen NEC
class 2 entsprechenden Spannungsquelle verbunden werden!
VORSICHT
VORSICHT!
Zur Einhaltung der UL-Anforderungen dürfen die IP67 Box Module nicht mit unbegrenzten Spannungsquel-
len verbunden werden!
Netzwerke
VORSICHT
VORSICHT!
Zur Einhaltung der UL-Anforderungen dürfen die IP67 Box Module nicht mit Telekommunikations-Netzen
verbunden werden!
Umgebungstemperatur
VORSICHT
VORSICHT!
Zur Einhaltung der UL-Anforderungen dürfen die IP67 Box Module nur in einem Umgebungstemperaturbe-
reich von 0 bis 55°C betrieben werden!
Kennzeichnung für UL
Alle nach UL (Underwriters Laboratories) zertifizierten IP67 Box Module sind mit der folgenden Markierung
gekennzeichnet.
EPI4xxx, ERI4xxx Version: 1.2 25Montage und Anschluss Abb. 18: UL-Markierung 4.6 Verkabelung Eine Auflistung der EtherCAT-Kabel, Powerkabel, Sensorkabel, IO-Link-Kabel, Ethernet-/EtherCAT- Steckverbinder sowie feldkonfektionierbare Steckverbinder finden Sie unter dem folgenden Link: https:// beckhoff.de/default.asp?ethercat-box/ethercat_box_cables.htm?id=690338951657421 IO-Link-Kabel Der IO-Link Master wird über ein ungeschirmtes, maximal 20 m langes, 3-, 4- oder 5-adriges (Typ A) oder 5- adriges (Typ B) Kabel mit dem IO-Link Device verbunden. Die IO-Link Kabel sind als gerade und abgewinkelte Variante verfügbar. Weitere Informationen zu dem IO-Link Anschluss finden Sie unter: Anschluss IO-Link Master [} 20] Abb. 19: Beispiel IO-Link-Kabel: Stecker auf Buchse Sensorkabel Abb. 20: Auswahl der von Beckhoff lieferbaren Sensorkabel 26 Version: 1.2 EPI4xxx, ERI4xxx
Inbetriebnahme/Konfiguration IO-Link Master/Device
5 Inbetriebnahme/Konfiguration IO-Link Master/
Device
5.1 IO-Link Master
5.1.1 Konfigurationserstellung TwinCAT - Manuell (Master)
In diesem Teil der Dokumentation wird die manuelle Konfiguration des IO-Link Masters in TwinCAT
beschrieben.
Unterscheidung Online/Offline
Die Unterscheidung Online/Offline bezieht sich auf das Vorhandensein der tatsächlichen I/O-Umgebung
(Antriebe, Klemmen, Box-Module).
• Offline
Wenn die Konfiguration im Vorfeld der Anlagenerstellung z. B. auf einem Laptop als
Programmiersystem erstellt werden soll, ist nur die "Offline-Konfiguration" möglich. Dann müssen alle
Komponenten händisch in der Konfiguration z. B. nach Elektro-Planung eingetragen werden (wie
nachfolgend unter 1. Importieren der Gerätebeschreibung IODD [} 55] beschrieben ist).
• Online
Ist die vorgesehene Steuerung bereits an das EtherCAT System angeschlossen, alle Komponenten mit
Spannung versorgt und die Infrastruktur betriebsbereit, kann die TwinCAT Konfiguration auch
vereinfacht durch das so genannte "Scannen" vom Runtime-System aus erzeugt werden. Dies ist der
so genannte Online-Vorgang. In jedem Fall prüft der EtherCAT Master bei jedem realen Hochlauf, ob
die vorgefundenen Geräte der Konfiguration entsprechen. Dieser Test kann in den erweiterten Device-
Einstellungen parametriert werden.
Damit die aktuellsten Features/Einstellungen des Masters genutzt werden können, sollte immer die
aktuellste ESI-Datei heruntergeladen werden. Beachten Sie bitte deshalb den nachfolgenden Hinweis.
Installation der neusten ESI-XML-Device-Description
Der TwinCAT System Manager benötigt zur Konfigurationserstellung im Online- und Offline-Modus
die Gerätebeschreibungsdateien der zu verwendeten Geräte. Die Gerätebeschreibungen sind die
so genannten ESI (EtherCAT Slave Information) in Form von XML-Dateien. Diese Dateien können
vom jeweiligen Hersteller angefordert werden bzw. werden zum Download bereitgestellt. Auf der
Beckhoff Website werden die ESI für Beckhoff EtherCAT Geräte bereitgehalten. Die ESI-Dateien
sind im Installationsverzeichnis von TwinCAT (Standardeinstellung: C:\TwinCAT\IO\EtherCAT) ab-
zulegen. Beim Öffnen eines neuen System Manager-Fensters werden die Dateien einmalig eingele-
sen. TwinCAT bringt bei der Installation die Beckhoff-ESI-Dateien mit, die zum Erstellungszeitpunkt
des TwinCAT builds aktuell waren. Ab TwinCAT 2.11 und in TwinCAT 3 kann aus dem System Ma-
nager heraus das ESI-Verzeichnis aktualisiert werden, wenn der Programmier-PC mit dem Internet
verbunden ist (TwinCAT → EtherCAT-Devices → Update Device Description…) s. folgend Abbil-
dung.
EPI4xxx, ERI4xxx Version: 1.2 27Inbetriebnahme/Konfiguration IO-Link Master/Device
Abb. 21: Update device description
Manuelles Anfügen eines Moduls
• Das EtherCAT-System muss sich in einem sicheren, spannungslosen Zustand befinden bevor Sie die
EtherCAT-Module an das EtherCAT-Netzwerk anschließen.
• Nach Einschalten der Betriebsspannung öffnen Sie den TwinCAT System Manager [} 40] (Config-
Mode)
• Fügen Sie ein neues E/A-Gerät an. Im nachfolgenden Dialog wählen Sie das Gerät EtherCAT (Direct
Mode), bestätigen Sie mit OK.
Abb. 22: Anfügen eines neuen E/A-Gerätes (E/A-Geräte -> Rechte Maustaste -> Gerät anfügen...)
28 Version: 1.2 EPI4xxx, ERI4xxxInbetriebnahme/Konfiguration IO-Link Master/Device Abb. 23: Auswahl des Gerätes (EtherCAT) • Fügen Sie eine neue Box an. Abb. 24: Anfügen einer neuen Box (Gerät -> Rechte Maustaste -> Box anfügen...) • Im angezeigten Dialog wählen Sie die gewünschte Box (z. B.: EP6224-2022), bestätigen Sie mit OK. EPI4xxx, ERI4xxx Version: 1.2 29
Inbetriebnahme/Konfiguration IO-Link Master/Device Abb. 25: Auswahl einer Box (z.B.: EP6224-2022) 30 Version: 1.2 EPI4xxx, ERI4xxx
Inbetriebnahme/Konfiguration IO-Link Master/Device Abb. 26: Angefügte Box im TwinCAT-Baum Konfiguration des IO-Link Masters Zur Konfiguration des IO-Link Masters wird ein PlugIn benötigt, das im Regelfall mit der TwinCAT Installation geliefert wird. Beim Anfügen des IO-Link Masters (s. Kapitel Konfigurationserstellung TwinCAT - Manuell [} 27] / Online Scan [} 33] (Master)) im TwinCAT System Manager wird ein zusätzlicher Karteireiter namens IO-Link angelegt (s. nachfolgende Abbildung). Sollte der Karteireiter nicht angezeigt werden, fehlt die entsprechende System Manager Extension. Diese kann ggf. nachinstalliert werden. Bitte wenden Sie sich dazu an den Support [} 96]. EPI4xxx, ERI4xxx Version: 1.2 31
Inbetriebnahme/Konfiguration IO-Link Master/Device Abb. 27: Karteireiter "IO-Link" 32 Version: 1.2 EPI4xxx, ERI4xxx
Inbetriebnahme/Konfiguration IO-Link Master/Device
5.1.2 Konfigurationserstellung TwinCAT - Online scan (Master)
In diesem Teil der Dokumentation wird die Konfiguration eines physisch vorhandenen IO-Link Masters in
TwinCAT beschrieben.
Online Konfigurationserstellung „Scannen“ (TwinCAT 3.x)
Unterscheidung Online/Offline
Die Unterscheidung Online/Offline bezieht sich auf das Vorhandensein der tatsächlichen I/O-Umgebung
(Antriebe, Klemmen, Box-Module).
• Offline
Wenn die Konfiguration im Vorfeld der Anlagenerstellung z. B. auf einem Laptop als
Programmiersystem erstellt werden soll, ist nur die "Offline-Konfiguration" möglich. Dann müssen alle
Komponenten händisch in der Konfiguration z. B. nach Elektro-Planung eingetragen werden (wie
nachfolgend unter 1. Importieren der Gerätebeschreibung IODD [} 55] beschrieben ist).
• Online
Ist die vorgesehene Steuerung bereits an das EtherCAT System angeschlossen, alle Komponenten mit
Spannung versorgt und die Infrastruktur betriebsbereit, kann die TwinCAT Konfiguration auch
vereinfacht durch das so genannte "Scannen" vom Runtime-System aus erzeugt werden. Dies ist der
so genannte Online-Vorgang. In jedem Fall prüft der EtherCAT Master bei jedem realen Hochlauf, ob
die vorgefundenen Geräte der Konfiguration entsprechen. Dieser Test kann in den erweiterten Device-
Einstellungen parametriert werden.
Damit die aktuellsten Features/Einstellungen des Masters genutzt werden können, sollte immer die
aktuellste ESI-Datei heruntergeladen werden. Beachten Sie bitte deshalb den nachfolgenden Hinweis.
Installation der neusten ESI-XML-Device-Description
Der TwinCAT System Manager benötigt zur Konfigurationserstellung im Online- und Offline-Modus
die Gerätebeschreibungsdateien der zu verwendeten Geräte. Die Gerätebeschreibungen sind die
so genannten ESI (EtherCAT Slave Information) in Form von XML-Dateien. Diese Dateien können
vom jeweiligen Hersteller angefordert werden bzw. werden zum Download bereitgestellt. Auf der
Beckhoff Website werden die ESI für Beckhoff EtherCAT Geräte bereitgehalten. Die ESI-Dateien
sind im Installationsverzeichnis von TwinCAT (Standardeinstellung: C:\TwinCAT\IO\EtherCAT) ab-
zulegen. Beim Öffnen eines neuen System Manager-Fensters werden die Dateien einmalig eingele-
sen. TwinCAT bringt bei der Installation die Beckhoff-ESI-Dateien mit, die zum Erstellungszeitpunkt
des TwinCAT builds aktuell waren. Ab TwinCAT 2.11 und in TwinCAT 3 kann aus dem System Ma-
nager heraus das ESI-Verzeichnis aktualisiert werden, wenn der Programmier-PC mit dem Internet
verbunden ist (TwinCAT → EtherCAT-Devices → Update Device Description…) s. folgend Abbil-
dung.
EPI4xxx, ERI4xxx Version: 1.2 33Inbetriebnahme/Konfiguration IO-Link Master/Device
Abb. 28: Update device description
Zur Konfigurationserstellung
• muss die reale EtherCAT- und IO-Link-Hardware (Geräte, Koppler, Antriebe) vorliegen und installiert
sein.
• die Geräte/Module müssen über EtherCAT-Kabel und IO-Link-Kabel so verbunden sein wie sie später
eingesetzt werden sollen.
• die Geräte/Module müssen mit Energie versorgt werden und kommunikationsbereit sein.
• TwinCAT muss auf dem Zielsystem im CONFIG-Modus sein.
Der Online-Scan-Vorgang setzt sich zusammen aus:
• Erkennen des EtherCAT-Gerätes (Ethernet-Port am IPC)
• Erkennen der angeschlossenen EtherCAT-Teilnehmer- Dieser Schritt kann auch unabhängig vom
vorherigen Schritt durchgeführt werden.
• Problembehandlung
Auch kann der Scan bei bestehender Konfiguration zum Vergleich durchgeführt werden.
Erkennen/Scan des EtherCAT Geräts
Befindet sich das TwinCAT-System im Config-Modus (TwinCAT Icon blau bzw. blaue Anzeige im System
Manager) kann online nach Geräten gesucht werden.
Abb. 29: TwinCAT Anzeige Config-Modus
34 Version: 1.2 EPI4xxx, ERI4xxxInbetriebnahme/Konfiguration IO-Link Master/Device
Online Scannen im Config Mode
Die Online-Suche im RUN-Modus (produktiver Betrieb) ist nicht möglich.
Es ist die Unterscheidung zwischen TwinCAT-Programmiersystem und TwinCAT-Zielsystem zu be-
achten. Das TwinCAT-Icon neben der Windows-Uhr stellt immer den TwinCAT-Modus des lokalen
IPC dar. Im System Manager-Fenster wird dagegen der TwinCAT-Zustand des Zielsystems gezeigt.
Im Konfigurationsbaum bringt Sie ein Rechtsklick auf den Punkt „I/O Devices“ zum Such-Dialog.
Abb. 30: Scan Devices
Dieser Scan-Modus versucht nicht nur EtherCAT-Geräte (bzw. die als solche nutzbaren Ethernet-Ports) zu
finden, sondern auch NOVRAM, Feldbuskarten, SMB etc. Nicht alle Geräte können jedoch automatisch
gefunden werden.
Abb. 31: Hinweis automatischer Gerätescan
Ethernet Ports mit installierten TwinCAT Realtime-Treiber werden als "RT-Ethernet" Geräte angezeigt.
Testweise wird an diesen Ports ein EtherCAT-Frame verschickt. Erkennt der Scan-Agent an der Antwort,
dass ein EtherCAT-Gerät angeschlossen ist, wird der Port allerdings gleich als "EtherCAT Device"
angezeigt.
EPI4xxx, ERI4xxx Version: 1.2 35Inbetriebnahme/Konfiguration IO-Link Master/Device
Abb. 32: erkannte Ethernet-Geräte
Für alle angewählten Geräte wird nach Bestätigung "OK" im nachfolgenden ein Teilnehmer-Scan
vorgeschlagen (siehe nachfolgende Abbildung).
Erkennen/Scan der EtherCAT Teilnehmer
Funktionsweise Online Scan
Beim Scan fragt der Master die Identity Information des EtherCAT Devices aus dem Device-EE-
PROM ab. Es werden Name und Revision zur Typbestimmung herangezogen. Die entsprechenden
Geräte werden dann in den hinterlegten ESI-Daten gesucht und in dem dort definierten Default-Zu-
stand in den Konfigurationsbaum eingebaut.
Wurde ein EtherCAT-Device in der Konfiguration angelegt (manuell oder durch Scan), kann das I/O-Feld
nach Teilnehmern/Slaves gescannt werden.
Abb. 33: Scan-Abfrage nach dem automatischen Anlegen eines EtherCAT Gerätes
Die Konfiguration wurde aufgebaut und direkt in den Online-Zustand (OPERATIONAL) versetzt. Das
EtherCAT System sollte sich in einem funktionsfähigen zyklischen Betrieb, wie in der nachfolgenden
Abbildung dargestellt, befinden.
36 Version: 1.2 EPI4xxx, ERI4xxxInbetriebnahme/Konfiguration IO-Link Master/Device Abb. 34: beispielhafte Online-Anzeige Zu beachten sind: • Alle Boxen sollten im OP-State sein • der EtherCAT Master soll im "Actual State" OP sein • "Frames/sec" soll der Zykluszeit unter Berücksichtigung der versendeten Frameanzahl sein • es sollen weder übermäßig "LostFrames"- noch CRC-Fehler auftreten Die Konfiguration ist nun fertig gestellt. Sie kann auch wie im manuellen Vorgang beschrieben verändert werden. Wie in der nachfolgenden Abbildung sichtbar, wird der angeschlossene IO-Link Master (EP6224-2022) im TwinCAT Baum angezeigt. Abb. 35: Master-Anzeige nach „Scan for boxes“ EPI4xxx, ERI4xxx Version: 1.2 37
Inbetriebnahme/Konfiguration IO-Link Master/Device
Problembehandlung
Beim Scannen können verschiedene Effekte auftreten.
• es wird ein unbekanntes Gerät entdeckt, d. h. ein EtherCAT Device für den keine ESI-XML-
Beschreibung vorliegt.
In diesem Fall bietet der System Manager an, die im Gerät eventuell vorliegende ESI auszulesen.
• Teilnehmer werden nicht richtig erkannt
Ursachen können sein
◦ fehlerhafte Datenverbindungen, es treten Datenverluste während des Scans auf
◦ Device hat ungültige Gerätebeschreibung
Es sind die Verbindungen und Teilnehmer gezielt zu überprüfen, z. B. durch den Emergency
Scan.
Der Scan ist dann erneut vorzunehmen.
Scan über bestehende Konfiguration
Wird der Scan bei bestehender Konfiguration angestoßen, kann die reale I/O-Umgebung genau der
Konfiguration entsprechen oder differieren. So kann die Konfiguration verglichen werden.
Abb. 36: Identische Konfiguration
Sind Unterschiede feststellbar, werden diese im Korrekturdialog angezeigt, die Konfiguration kann
umgehend angepasst werden.
Abb. 37: Beispiel-Korrekturdialog
Es wird empfohlen das Häkchen „Extended Information“ zu setzen, weil dadurch Unterschiede in der
Revision sichtbar werden.
38 Version: 1.2 EPI4xxx, ERI4xxxInbetriebnahme/Konfiguration IO-Link Master/Device
Farbe Erläuterung
grün Dieses EtherCAT Device findet seine Entsprechung auf der Gegenseite. Typ und Revision stimmen überein.
blau Dieses EtherCAT Device ist auf der Gegenseite vorhanden, aber in einer anderen Revision.
Ist die gefundene Revision > als die konfigurierte Revision, ist der Einsatz unter Berücksichtigung der Kompatibilität mög-
lich. Ist die gefundene Revision < als die konfigurierte Revision, ist der Einsatz vermutlich nicht möglich. Eventuell unter-
stützt das vorgefundene Gerät nicht alle Funktionen, die der Master von ihm aufgrund der höheren Revision erwartet.
hellblau Dieses EtherCAT Device wird ignoriert (Button "Ignore").
rot Dieses EtherCAT Device ist auf der Gegenseite nicht vorhanden.
Geräte-Auswahl nach Revision, Kompatibilität
Mit der ESI-Beschreibung werden auch das Prozessabbild, die Art der Kommunikation zwischen
Master und Device/Gerät und ggf. Geräte-Funktionen definiert. Damit muss das reale Gerät (Firm-
ware wenn vorhanden) die Kommunikationsanfragen/-einstellungen des Masters unterstützen. Dies
ist abwärtskompatibel der Fall, d. h. neuere Geräte (höhere Revision) sollen es auch unterstützen
wenn der EtherCAT Master sie als eine ältere Revision anspricht. Als Beckhoff-Kompatibilitätsregel
für EtherCAT-Klemmen/Boxen ist anzunehmen:
Geräte-Revision in der Anlage >= Geräte Revision in der Konfiguration
Dies erlaubt auch den späteren Austausch von Geräten ohne Veränderung der Konfiguration (ab-
weichende Vorgaben sind bei Antrieben möglich).
Beispiel: In der Konfiguration wird eine EL2521-0025-1018 vorgesehen, dann kann real eine
EL2521-0025-1019 oder höher (-1020, -1021) eingesetzt werden.
Wenn im TwinCAT System aktuelle ESI-Beschreibungen vorliegen, entspricht der im Auswahldialog
als letzte Revision angebotene Stand dem Produktionsstand von Beckhoff. Es wird empfohlen, bei
Erstellung einer neuen Konfiguration jeweils diesen letzten Revisionsstand eines Gerätes zu ver-
wenden, wenn aktuell produzierte Beckhoff-Geräte in der realen Applikation verwendet werden. Nur
wenn ältere Geräte aus Lagerbeständen in der Applikation verbaut werden sollen, ist es sinnvoll ei-
ne ältere Revision einzubinden.
Abb. 38: Beispiel-Korrekturdialog mit Änderungen
Sind alle Änderungen übernommen oder akzeptiert, können sie durch „OK“ in die reale *.tsm-Konfiguration
übernommen werden.
EPI4xxx, ERI4xxx Version: 1.2 39Inbetriebnahme/Konfiguration IO-Link Master/Device
5.1.3 Konfiguration mit TwinCAT - Erläuterung Karteireiter
Klicken Sie im linken Fenster des TwinCAT System Managers auf den Baumzweig der IO-Link Box die Sie
konfigurieren möchten.
Abb. 39: Baumzweig der zu konfigurierende IO-Link-Box
Im rechten Fenster des TwinCAT System Managers stehen Ihnen nun verschiedene Karteireiter zur
Konfiguration der IO-Link Box zur Verfügung.
Karteireiter Allgemein
Abb. 40: Karteireiter Allgemein
Name Name des IO-Link-Masters
Id Laufende Nr. des IO-Link-Masters
Typ Typ des IO-Link-Masters
Kommentar Hier können Sie einen Kommentar (z. B. zum Anlagenteil) hinzufügen.
Disabled Hier können Sie den IO-Link-Master deaktivieren.
Symbole erzeugen Nur wenn dieses Kontrollkästchen aktiviert ist, können Sie per ADS auf den IO-
Link-Master zugreifen.
40 Version: 1.2 EPI4xxx, ERI4xxxInbetriebnahme/Konfiguration IO-Link Master/Device
Karteireiter EtherCAT
Abb. 41: Karteireiter EtherCAT
Typ Typ des IO-Link Masters
Product/Revision Produkt- und Revisions-Nummer des IO-Link Masters
Auto Inc Adr. Auto-Inkrement-Adresse des IO-Link Masters. Die Auto-Inkrement-Adresse
kann benutzt werden, um jedes EtherCAT-Gerät oder jeden IO-Link Master
anhand seiner physikalischen Position im Kommunikationsring zu adressieren.
Die Auto-Inkrement-Adressierung wird während der Start-Up-Phase benutzt,
wenn der IO-Link Master die Adressen an die EtherCAT-Geräte oder weitere
IO-Link Master vergibt. Bei der Auto-Inkrement-Adressierung hat das erste
EtherCAT-Gerät im Ring die Adresse 0000hex und für jedes weitere wird die
Adresse um 1 verringert (FFFFhex, FFFEhex usw.).
EtherCAT Adr. Feste Adresse eines EtherCAT-Gerätes/IO-Link-Masters. Diese Adresse wird
vom EtherCAT-Gerät/IO-Link Master während der Start-Up-Phase vergeben.
Um den Default-Wert zu ändern, müssen Sie zuvor das Kontrollkästchen links
von dem Eingabefeld markieren.
Vorgänger Port Name und Port des EtherCAT-Geräts/IO-Link-Masters, an den dieses Gerät
angeschlossen ist. Falls es möglich ist, dieses Gerät mit einem anderen zu
verbinden, ohne die Reihenfolge der EtherCAT-Geräte/IO-Link-Master im
Kommunikationsring zu ändern, dann ist dieses Kombinationsfeld aktiviert und
Sie können das EtherCAT-Gerät oder den IO-Link Master auswählen, mit dem
dieses Gerät verbunden werden soll.
Weitere Einstellungen Diese Schaltfläche öffnet die Dialoge für die erweiterten Einstellungen.
Der Link am unteren Rand des Karteireiters führt Sie im Internet auf die Produktseite dieses IO-Link Masters.
Karteireiter Prozessdaten
Zeigt die Konfiguration der Prozessdaten an. Die Eingangs- und Ausgangsdaten des IO-Link Masters
werden als CANopen Prozess-Daten-Objekte (PDO) dargestellt. Falls der IO-Link Master es unterstützt,
ermöglicht dieser Dialog dem Anwender ein PDO über PDO-Zuordnung auszuwählen und den Inhalt des
individuellen PDOs zu variieren.
EPI4xxx, ERI4xxx Version: 1.2 41Sie können auch lesen