HIT 1000 Safety HIT 1500 Safety - Elektronischer Neigungsgeber Electronic Inclinometer - HYDAC
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Elektronischer
Neigungsgeber
Electronic Inclinometer
HIT 1000 Safety
HIT 1500 Safety
CANopen Safety
Modifikation: 000
Bedienungsanleitung
(Originalanleitung) Mat –Nr. 669959 / Stand: 30.09.2020 D / E
Instruction manual
(Translation of original
instructions)
2 HIT 1000 / 1500 CANopen Safety
Inhaltsverzeichnis
D
Vorwort ................................................................................................................... 4
1. Allgemeine Hinweise ................................................................................... 5
1.1. Geltungsbereich ...................................................................................................... 5
1.2. Haftungsausschluss ................................................................................................ 5
1.3. Urheberrechte ......................................................................................................... 6
1.4. Herstellererklärung .................................................................................................. 6
1.5. Gewährleistung ....................................................................................................... 6
1.6. Symbole .................................................................................................................. 6
1.7. Bestimmungsgemäße Verwendung ........................................................................ 7
1.8. Vorhersehbarer Fehlgebrauch ................................................................................ 7
1.9. Verwendete Abkürzungen und Begriffe ................................................................... 8
1.10. Kundenspezifische Ausführungen ........................................................................... 9
2. Sicherheitshinweise .................................................................................... 9
2.1. Verpflichtung des Betreibers vor der Inbetriebnahme ............................................. 9
2.2. Personalauswahl, Qualifikation und grundsätzliche Pflichten ............................... 10
2.3. Organisatorische Maßnahmen .............................................................................. 10
2.4. Allgemeine Gefahren bei der Verwendung ........................................................... 10
2.5. Sicherheitstechnische Hinweise ............................................................................ 11
3. Transport, Verpackung, Lagerung ........................................................... 11
3.1. Transport ............................................................................................................... 11
3.2. Verpackung ........................................................................................................... 11
3.3. Lagerung ............................................................................................................... 11
4. Entsorgung ................................................................................................. 11
5. Lieferumfang und Anlieferzustand .......................................................... 12
6. Produktkontrolle und Prüfzeichen ........................................................... 12
6.1. Allgemeines........................................................................................................... 12
6.2. CE Zeichen ........................................................................................................... 12
6.3. ECE-Prüfzeichen................................................................................................... 12
6.4. UL-Zertifikat........................................................................................................... 12
7. Wartung und Instandhaltung .................................................................... 12
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959
HIT 1000 / 1500 CANopen Safety 3
8. Montage ...................................................................................................... 13
8.1. Allgemeine Montagehinweise................................................................................ 13
8.2.
8.3.
Anforderungen an die mechanische Montage ....................................................... 14
Anforderungen an die elektrische Montage ........................................................... 14
D
9. Anschlussbelegungen .............................................................................. 15
9.1. Darstellung Steckverbinder ................................................................................... 15
9.2. Pinbelegung .......................................................................................................... 15
10. Koordinatensystem und Drehrichtung .................................................... 16
11. Produktbeschreibung ................................................................................ 17
11.1. Neigungsmessung ................................................................................................ 17
11.1.1. Statische Neigung [funktional sicher] ................................................................................................ 17
11.1.2. Bewegungskompensierte Neigung ................................................................................................... 19
11.1.3. Sonderfälle ........................................................................................................................................ 21
11.2. Zusätzliche Signale ............................................................................................... 23
11.2.1. Beschleunigungssignal [funktional sicher] ........................................................................................ 23
11.2.2. Drehratensignal [funktional sicher] .................................................................................................... 23
12. Protokolldaten ............................................................................................ 24
12.1. Protokollbeschreibung ........................................................................................... 24
12.2. CANopen .............................................................................................................. 24
12.2.1. Allgemeines ....................................................................................................................................... 24
12.2.2. Voreinstellung .................................................................................................................................... 25
13. Technische Daten ...................................................................................... 26
13.1. Eingangskenngrößen ............................................................................................ 26
13.1.1. Neigung ............................................................................................................................................. 26
13.1.2. Beschleunigung (ACC) [funktional sicher] ........................................................................................ 26
13.1.3. Drehrate (GYRO) [funktional sicher] HIT 1500 ................................................................................. 27
13.2. Ausgangskenngrößen ........................................................................................... 27
13.3. Sicherheitsrelevante Größen................................................................................. 27
13.4. Umgebungsbedingungen ...................................................................................... 28
13.5. Sonstige Größen ................................................................................................... 28
14. Typenschlüssel .......................................................................................... 29
15. Abmessungen ............................................................................................ 30
16. Elektrisches Zubehör ................................................................................ 31
17. Kontaktdaten .............................................................................................. 33
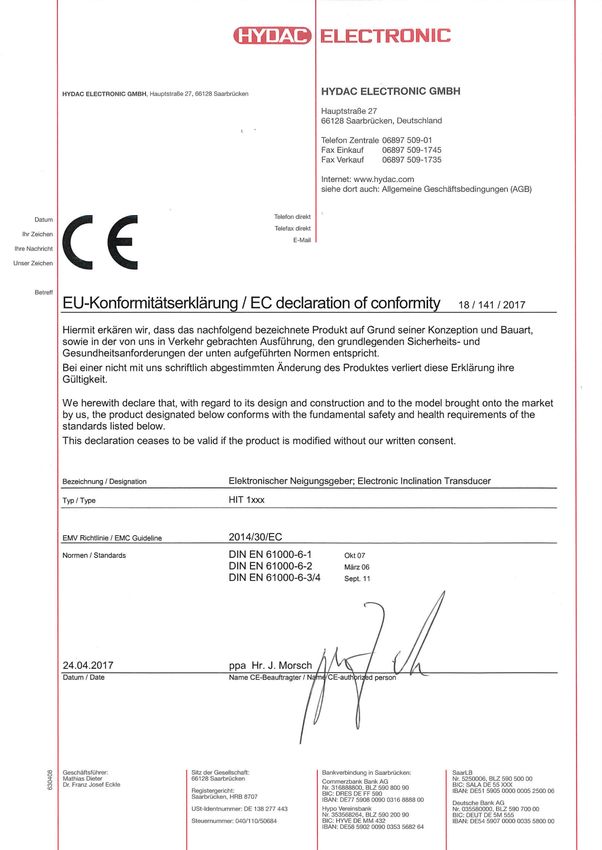
Anhang 1: Konformitätserklärung ..................................................................... 34
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959
4 HIT 1000 / 1500 CANopen Safety
Vorwort
D
Diese Bedienungsanleitung liefert dem Nutzer Informationen und Vorgaben für eine
korrekte und sichere Vorgehensweise bei Montage, Betrieb und Wartung eines Produktes
der HYDAC ELECTRONIC GMBH.
Sie dient dazu, das Produkt kennen zu lernen und seine bestimmungsgemäßen
Einsatzmöglichkeiten optimal zu nutzen.
Alle Angaben in dieser Bedienungsanleitung entsprechen dem Stand der Technik des
Produktes zum Zeitpunkt ihrer Erstellung und beziehen sich auf die beschriebenen
Betriebsbedingungen und Einsatzfälle. Durch Produktweiterentwicklungen sind daher
Abweichungen bei technischen Angaben, Abbildungen und Maßen möglich.
Bei abweichenden Einsatzfällen und/oder Betriebsbedingungen oder Ergänzungs-
wünschen in der Produkt-Dokumentation wenden Sie sich bitte an die entsprechende
HYDAC-Fachabteilung.
Bei technischen Fragen, Hinweisen oder Störungen nehmen Sie bitte Kontakt mit Ihrer
HYDAC-Vertretung auf.
Ergänzungswünsche richten Sie bitte an die Technische Dokumentation. Die Redaktion
freut sich über Ihre Mitarbeit.
„Aus der Praxis für die Praxis“
HYDAC ELECTRONIC GMBH
Technische Dokumentation
Hauptstraße 27
66128 Saarbrücken
- Deutschland -
Tel: +49(0)6897 / 509-01
Fax: +49(0)6897 / 509-1726
Email: electronic@hydac.com
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959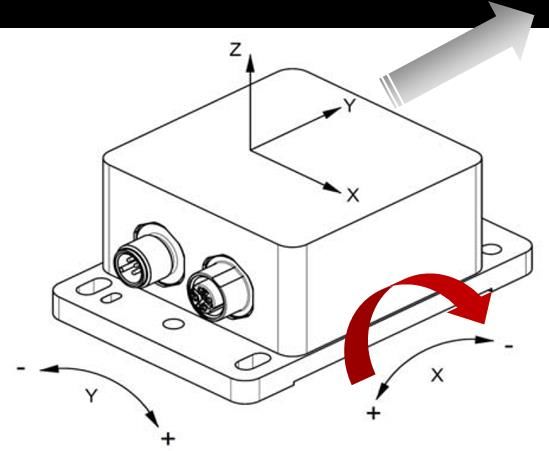
HIT 1000 / 1500 CANopen Safety 5
1. Allgemeine Hinweise
Lesen Sie vor der Inbetriebnahme des Produkts diese Bedienungsanleitung, das
zugehörige Safety-Manual sowie die zugehörige Protokollbeschreibung und stellen Sie
sicher, dass das hier beschriebene Produkt, nachfolgend auch als Mess-System
bezeichnet, für Ihre Anwendung geeignet ist.
D
Vor jeder Inbetriebnahme, Montage oder einem Austausch, ist der
Zustand des Mess-Systems sowie des mitgelieferten Zubehörs auf
Beschädigung durch Sichtkontrolle zu prüfen.
Falsche Handhabung bzw. die Nichteinhaltung von Gebrauchshinweisen
oder technischen Angaben kann zu Sach- und / oder Personenschäden
führen.
1.1. Geltungsbereich
Diese Bedienungsanleitung gilt ausschließlich für folgende Mess-System-Baureihen zur
Neigungsmessung bezogen auf die horizontale Ebene mit erhöhten Anforderungen an die
funktionale Sicherheit:
CANopen Safety: HIT 1xxx–F13–x–xxx–x–xx–x–S2PD–x– 000
Die Produkte sind durch aufgeklebte Typenschilder gekennzeichnet und sind Bestandteil
einer Anlage oder Maschine.
Folgende Dokumentationen gelten somit immer zusammen:
Anlagen- / maschinenspezifische Betriebsanleitungen des Betreibers
diese Bedienungsanleitung
das zugehörige Safety-Manual
die zugehörige Protokollbeschreibung für CANopen Safety
1.2. Haftungsausschluss
Diese Bedienungsanleitung wurde nach bestem Wissen und Gewissen erstellt. Es ist
dennoch nicht auszuschließen, dass sich trotz größter Sorgfalt Fehler eingeschlichen
haben. Haben Sie bitte deshalb Verständnis dafür, dass, soweit sich nachstehend nichts
Anderes ergibt, keine Gewährleistung und Haftung - gleich aus welchen Rechtsgründen -
für die Angaben in dieser Bedienungsanleitung übernommen wird.
Insbesondere haftet die HYDAC ELECTRONIC GMBH – nachfolgend Hersteller genannt -
nicht für entgangenen Gewinn oder sonstige Vermögensschäden. Dieser Haftungs-
ausschluss gilt nicht bei Vorsatz und grober Fahrlässigkeit.
Er gilt ferner nicht für Mängel, die arglistig verschwiegen wurden oder deren Abwesenheit
garantiert wurde, sowie bei schuldhafter Verletzung von Leben, Körper und Gesundheit.
Sofern fahrlässig eine vertragswesentliche Pflicht verletzt wurde, ist die Haftung auf den
vorhersehbaren Schaden begrenzt. Ansprüche aus Produkthaftung bleiben unberührt.
Im Falle der Übersetzung ist der Text der deutschen Original-
Bedienungsanleitung der allein gültige.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959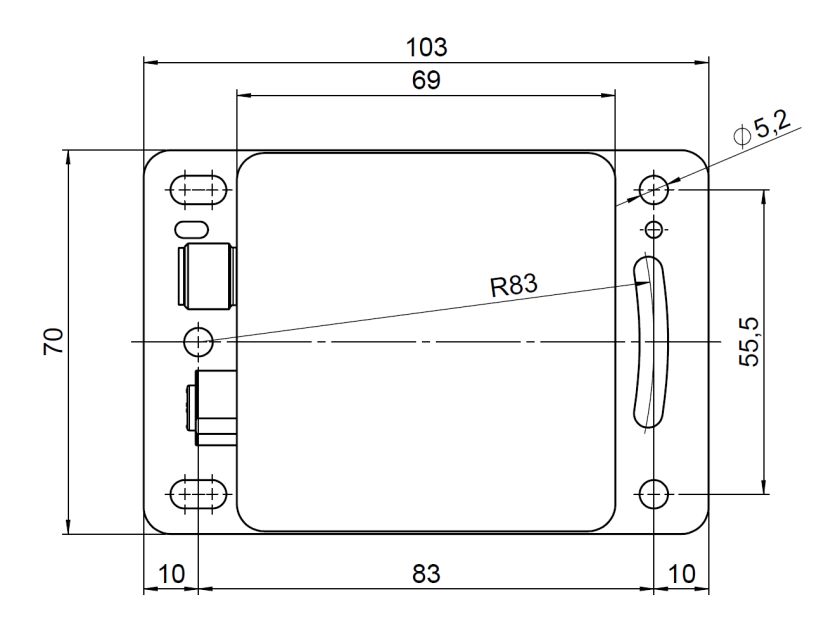
6 HIT 1000 / 1500 CANopen Safety
1.3. Urheberrechte
Diese Bedienungsanleitung, einschließlich der darin enthaltenen Abbildungen, ist
D urheberrechtlich geschützt. Drittanwendungen dieser Bedienungsanleitung, welche von den
urheberrechtlichen Bestimmungen abweichen, sind verboten.
Die Reproduktion, Übersetzung sowie die elektronische und fotografische Archivierung und
Veränderung bedarf der schriftlichen Genehmigung durch den Hersteller. Ein Verstoß kann
rechtliche Schritte gegen den Zuwiderhandelnden nach sich ziehen.
1.4. Herstellererklärung
Die Mess-Systeme wurden unter Beachtung geltender europäischer bzw. internationaler
Normen und Richtlinien entwickelt, konstruiert und gefertigt.
Eine entsprechende Herstellererklärung kann beim Hersteller angefordert werden.
Der Hersteller der Produkte besitzt ein zertifiziertes Qualitätssicherungssystem gemäß
ISO 9001.
1.5. Gewährleistung
Es gelten die „Allgemeinen Geschäftsbedingungen“ der HYDAC ELECTRONIC GMBH.
Diese stehen dem Betreiber spätestens mit der Auftragsbestätigung bzw. mit dem
Vertragsabschluss zur Verfügung.
Sie finden diese auch unter www.hydac.com -> Allgemeine Geschäftsbedingungen
(AGB).
Fremdeingriffe oder mechanische Modifikationen am Gehäuse des
Mess-Systems führen zum Erlöschen jeglicher Gewährleistungsan-
sprüche.
1.6. Symbole
Nachstehende Symbole dienen der Warnung und/oder der Information zu besonders zu
beachtenden Funktionen, Einstellungen und/oder Maßnahmen.
Das Symbol bedeutet, dass der an dieser Stelle beschriebene
Sachverhalt verboten ist (gemäß ISO 7010).
Das Symbol bedeutet, dass Tod, schwerer Personen- oder erheblicher
Sachschaden eintreten können, wenn die an dieser Stelle beschriebene
Maßnahme nicht beachtet oder angewendet wurde (gemäß ISO 7010).
Das Symbol kennzeichnet wichtige Informationen bzw. Merkmale und
Anwendungstipps zum verwendeten Produkt.
Das Symbol bedeutet, dass entsprechende ESD-Schutzmaßnahmen
nach DIN EN 100 015-1 zu beachten sind.
(Herbeiführen eines Potentialausgleichs zwischen Körper und Geräte- sowie Gehäuse-
masse über einen hochohmigen Widerstand (ca. 1 MOhm) z.B. mit einem handels-
üblichen ESD-Armband).
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959
HIT 1000 / 1500 CANopen Safety 7
1.7. Bestimmungsgemäße Verwendung
Das Mess-System wird zur Erfassung der Neigung bezogen auf die horizontale Ebene sowie
zur Aufbereitung der Messdaten für eine nachgeschaltete Steuerung bei mobilen Prozess-
und Steuerungs-Abläufen verwendet. D
Für eine bestimmungsgemäße Verwendung mit erhöhten Anforderungen an die funktionale
Sicherheit, ist darauf zu achten, dass das Mess-System während der Bestimmung der Nei-
gung in Ruhe ist. Der Zustand „Ruhe“ wird durch Prüfung des entsprchenden Sicherheits-
Status-Signals signalisiert und soll vom Anwender ausgewertet werden. Nähere Angaben
hierzu finden Sie im zugehörigen Safety-Manual sowie in der zugehörigen Protokoll-
beschreibung.
Bei der Entwicklung des Mess-Systems wurden die Forderungen der Maschinenrichtlinie
DIN EN ISO 13849-1:2015 bis PL d sowie der DIN EN 61508:2010 bis SIL 2 zu Grunde
gelegt und erfüllt.
Für die bestimmungsgemäße Verwendung hat der Betreiber des Mess-
Systems darauf zu achten, dass alle vom Mess-System gelieferten Sta-
tusinformationen im übergeordnete Steuersystem ausgewertet werden.
Die Statusinformationen sind in der zugehörigen Protokollbeschreibung
des Mess-Systems detailliert beschrieben.
Beispiele für typische Einsatzbereiche in mobilen Applikation:
Fördertechnik: z. B. Krane jeglicher Art, Hebebühnen, Scherenhubtische, Telehandler,
Flurförderfahrzeuge, Stapler
Baumaschinen: z.B. Betonpumpen, Straßenbaumaschinen
Land- und Forstmaschinen: z.B. Schlepper, Mähdrescher, Holzerntemaschinen
Kommunalfahrzeuge: z.B. Müllfahrzeuge, Kehrmaschinen
Miningmaschinen, Bohrgeräte
Sonderfahrzeuge
gezogene Maschinen, Anhänger
Nutzfahrzeuge (z.B. LKW oder Busse)
1.8. Vorhersehbarer Fehlgebrauch
Mängel- und Haftungsansprüche – gleich aus welchem Rechtsgrund – bestehen insbe-
sondere nicht bei fehlerhafter oder unsachgemäßer Installation, Inbetriebnahme, Betrieb,
Behandlung, Lagerung, Wartung, Reparatur, Einsatz ungeeigneter Betriebsmittel oder
sonstiger nicht vom Hersteller zu verantwortenden Umständen.
Insbesondere sind folgende Anwendungen untersagt:
in Umgebungen mit explosiver Atmosphäre
zu medizinischen Zwecken
Für die Bestimmung der Schnittstellen zum Einbau in eine Anlage, den Einbau selbst, die
Art der Anwendung sowie die Funktionalität des Produkts in dieser Anlage übernimmt der
Hersteller keine Verantwortung.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959
8 HIT 1000 / 1500 CANopen Safety
Ein nicht bestimmungsgemäßer Gebrauch liegt unter anderem vor,
wenn das Mess-System
außerhalb der in den technischen Daten beschriebenen Spezifika-
D tionen betrieben wird.
die Montagevorschriften nicht beachtet wurden.
1.9. Verwendete Abkürzungen und Begriffe
Tabelle 1 gibt eine Übersicht der in dieser Bedienungsanleitung verwendeten Abkürzungen
und Begriffe.
Tabelle 1 – Abkürzungen und Begriffe
ACC Accelerometer; Beschleunigungssensor
CAN Controler Area Network
CAN basiertes Kommunikationsprotokoll für
CANopen
Automatisierungsaufgaben
CAN IN AUTOMATION
CiA international users' and manufacturers' group e. V
CiA (EU trademark 00 710 98 46)
DIN Deutsche Institut für Normung e.V. (DIN)
Electronic Data Sheet; elektronisch lesbare Beschreibung des
EDS
CANopen „object dictionary“
EG Europäische Gemeinschaft
EMV Elektro-Magnetische-Verträglichkeit
EN Europäische Norm
ESD Elektrostatische Entladung (Electro Static Discharge)
g Erdbeschleunigung
GYRO Gyroskop; Drehratensensor
Absolut messender Neigungsgeber der
HIT
HYDAC ELECTRONIC GMBH
IEC Internationale Electrotechnical Commission
ISO International Organization for Standardization
CAN basiertes Kommunikationsprotokoll für den Fahrzeugbau
J1939
(SAE J1939)
MEMS Micro-Electro-Mechanical System
NEC National Electrical Code
RMS Root Mean Square; quadratisches Mittel
SAE Society of Automotive Engineers
Safety-Relevant Data Object
SRDO
Objekt zur sichern Übertragung von Werten bei CANopen Safety
UL Underwriters Laborities
VDC Gleichspannung
VDE Verein Deutscher Elektrotechniker
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959
HIT 1000 / 1500 CANopen Safety 9
1.10. Kundenspezifische Ausführungen
Kundenspezifische Ausführungen des Mess-Systems (Modifikationskennung abweichend
von „-000“; siehe Kapitel 14 Typenschlüssel) können sich von den hier und den in der
Protokollbeschreibung beschriebenen technischen Details, einschließlich der Anschluss-
technik, unterscheiden.
D
Hinweise zu den jeweils vorhandenen Abweichungen zu dem hier
beschriebenen Standard, finden sie im zugehörigen Datenblatt.
Im Zweifelsfall sollte unter Angabe der Artikelnummer Rücksprache mit dem Hersteller
gehalten werden.
2. Sicherheitshinweise
Die hier vorliegende Bedienungsanleitung beschreibt Mess-Systeme der Baureihe HIT 1000
und HIT 1500 mit CANopen Safety Protokoll-Schnittstelle zur Messung von Neigung an
mobilen Arbeitsmaschinen bei Anwendungen mit erhöhten Anforderungen an die
funktionale Sicherheit.
Diese Bedienungsanleitung richtet sich ausdrücklich an Personen mit Fachkenntnissen
hinsichtlich der Erkennung von Risiken durch Maschinenfunktionen,
für den sachgemäßen elektrische Anschluss und
den sachgemäßen mechanischen Anschluss.
Diese Personen sollten sich der unterschiedlichen Anforderungen bei Planung, Inbetrieb-
nahme, Betrieb, Wartung und Instandhaltung sowie Entsorgung bewusst sein. Die
vorliegende Bedienungsanleitung enthält die zur Beurteilung notwendigen Informationen.
Für Anwendungen ohne erhöhte funktionale Sicherheit, stehen Ihnen HYDAC Mess-
Systeme zur Bestimmung der Neigung ohne Sicherheitszertifizierung zur Verfügung. Diese
Produkte sind anhand der Typenschlüsselerweiterung F11 bzw. F12 (siehe Kapitel
14 Typenschlüssel) eindeutig zu erkennen. Sie sind in einer gesonderten Bedienungs-
anleitung beschrieben.
2.1. Verpflichtung des Betreibers vor der Inbetriebnahme
Gemäß der EG-Maschinenrichtlinie entspricht das Mess-System einer Komponente für den
Einbau in eine Anlage bzw. Maschine. Des Weiteren wurde die Konformität des Mess-
Systems hinsichtlich der EMV-Richtlinie geprüft.
Vor der Verwendung des Mess-Systems in einer Maschine ist eine Sicherheits-
betrachung für die Gesamtmaschine erforderlich. Das Ergebnis dieser Betrachtung hat
der Anwender mit dem sicherheitstechnischen Kennzahlen des Mess-Systems zu ver-
gleichen. Zu beachten ist dabei, dass eine Verkettung von Elementen zur Erfüllung einer
Sicherheitsfunktion, die Anforderungen an das Einzelelement gegenüber den Anforde-
rungen an die jeweilige Sicherheitsfunktion erhöhen kann.
Die Inbetriebnahme des Mess-Systems ist deshalb erst dann erlaubt, wenn festgestellt
wurde, dass die Anlage bzw. Maschine, in die das Mess-System eingebaut werden soll, den
Bestimmungen der entsprechenden Richtlinien entspricht (z.B. EG-Maschinenrichtlinie, EG-
EMV-Richtlinie oder entsprechende nationale Normen).
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 66995910 HIT 1000 / 1500 CANopen Safety
2.2. Personalauswahl, Qualifikation und grundsätzliche Pflichten
Qualifiziertes Personal sind Personen, die auf Grund ihrer Ausbildung, Erfahrung und
D Unterweisung sowie ihrer Kenntnisse über einschlägige Normen, Bestimmungen, Unfall-
verhütungsvorschriften und Betriebsverhältnisse, von dem für die Sicherheit der Anlage
Verantwortlichen berechtigt worden sind, die jeweils erforderlichen Tätigkeiten auszuführen,
und dabei mögliche Gefahren erkennen und vermeiden können.
Alle Arbeiten am Mess-System dürfen nur von qualifiziertem Fach-
personal durchgeführt werden.
Zur Definition von „qualifiziertem Personal“ sind zusätzlich die Normen VDE 0105-100 und
IEC 364 einzusehen (Bezugsquellen z.B. Beuth Verlag GmbH, VDE-Verlag GmbH).
Es ist verpflichtend eine klare Regelung der Verantwortlichkeiten für die Montage,
Installation, Inbetriebnahme und Bedienung festzulegen.
Es besteht Beaufsichtigungspflicht bei zu schulendem oder anzulernendem Personal!
2.3. Organisatorische Maßnahmen
Die nachfolgend aufgeführten Maßnahmen sind zur bestimmungsgemäßen Verwendung
des Mess-Systems einzuhalten!
Reparaturen dürfen nur vom Hersteller oder einer vom Hersteller
autorisierten Stelle bzw. Person vorgenommen werden.
Das Typenschild und eventuell aufgeklebte Verbots- bzw. Hinweisschilder auf dem
Mess-System sind stets in lesbarem Zustand zu erhalten.
Diese Bedienungsanleitung soll ständig am Einsatzort des Mess-Systems vorliegen.
Ergänzend zur Bedienungsanleitung sind allgemeingültige gesetzliche und sonstige
verbindliche Regelungen zur Unfallverhütung und zum Umweltschutz zu beachten und
zu vermitteln.
Die jeweils gültigen nationalen, örtlichen und anlagenspezifischen Bestimmungen und
Erfordernisse sind zu beachten und zu vermitteln.
Der Betreiber hat die Verpflichtung das Personal auf betriebliche Besonderheiten und
Anforderungen hinzuweisen.
Das mit Tätigkeiten am Mess-System beauftragte Personal muss vor Arbeitsbeginn die
Bedienungsanleitung, insbesondere das Kapitel 2 Sicherheitshinweise, gelesen und
verstanden haben.
2.4. Allgemeine Gefahren bei der Verwendung
Das Mess-System ist nach dem Stand der Technik und den anerkannten sicherheits-
technischen Regeln gefertigt. Dennoch können bei nicht bestimmungsgemäßer Verwen-
dung Gefahren für Leib und Leben des Benutzers oder Dritter bzw. Beeinträchtigungen des
Mess-Systems und anderer Sachwerte entstehen!
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959HIT 1000 / 1500 CANopen Safety 11
Mess-System nur in technisch einwandfreiem Zustand sowie bestimmungsgemäß, sicher-
heits- und gefahrenbewusst unter Beachtung dieser Bedienungsanleitung verwenden!
Insbesondere Störungen, die die Betriebssicherheit beeinträchtigen können, umgehend
beseitigen (lassen)! D
2.5. Sicherheitstechnische Hinweise
Eine Zerstörung, Beschädigung und/oder Funktionsbeeinträchtigung des Mess-Systems
kann durch die Einhaltung folgender Punkte vermieden werden:
Verdrahtungsarbeiten, Öffnen und Schließen von elektrischen Verbindungen nur im
spannungslosen Zustand durchführen.
Keine Schweißarbeiten vornehmen, wenn das Mess-System bereits verdrahtet bzw.
eingeschaltet ist.
Sicherstellen, dass die Montageumgebung vor aggressiven Medien (Säuren usw.)
geschützt ist.
Bei der Montage sind Schocks (z.B. Hammerschläge) auf das Mess-System zu
vermeiden.
Das Mess-System enthält elektrostatisch gefährdete Bauelemente und Baugruppen, die
durch unsachgemäße Behandlung zerstört werden können.
Berührungen der Mess-System-Anschlusskontakte mit den Fingern sind
zu vermeiden. Bei der Handhabung des Mess-Systems sind ESD-
Schutzmaßnahmen anzuwenden.
3. Transport, Verpackung, Lagerung
3.1. Transport
Der HIT 1x00 wird in einem stabilen Karton verpackt geliefert.
Achten Sie bei der Annahme und beim Auspacken auf evtuelle Transportschäden und
zeigen Sie diese dem Spediteur unverzüglich an.
3.2. Verpackung
Entfernen Sie die Verpackung erst unmittelbar vor der Montage.
Bewahren Sie die Verpackung auf, da diese bei erneutem Transport (z.B. bei wechselnden
Einsatzorten) oder einer Wiedereinlagerung optimalen Schutz für das Gerät bietet.
3.3. Lagerung
Angaben zu den zulässigen Umgebungsbedingungen am Lagerort enthält Kapitel
13.4 Umgebungsbedingungen.
4. Entsorgung
Falls das Mess-Systems nach Ablauf der Lebensdauer entsorgt werden soll, sind die jeweils
geltenden landesspezifischen Vorschriften zu beachten. Die bei Anwendungen mit erhöhten
Anforderungen an die funktionale Sicherheit geltende Gebrauchsdauer entnehmen Sie bitte
dem zugehörigen Safety-Manual.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 66995912 HIT 1000 / 1500 CANopen Safety
5. Lieferumfang und Anlieferzustand
Das Gerät wird mit elektrischem Zubehör gemäß Bestellung geliefert. Zum Lieferumfang
D gehören außerdem
diese Bedienungsanleitung,
das zugehörige Safety-Manual und
die zugehörige Protokollbeschreibung für CANopen Safety.
Die Protokollbeschreibung kann über einen Link heruntergeladen werden (siehe Kapitel
12 Protokolldaten).
Das Gerät wird mit Voreinstellungen für CANopen geliefert. Details dazu enthält Kapitel
12.2.2 Voreinstellung.
6. Produktkontrolle und Prüfzeichen
6.1. Allgemeines
Die Mess-Systeme der Baureihe HIT 1000 und HIT 1500 werden einzeln auf rechner-
gesteuerten Prüfplätzen abgeglichen und einem Endtest unterzogen. Beim Endtest wird die
Einhaltung der im Datenblatt festgelegten technischen Daten überprüft. Voraussetzung für
das Erreichen dieser technischen Daten im Betriebsfall ist die strikte Einhaltung der
technischen Spezifikation.
Bei Fragen bezüglich der technischen Daten oder Eignung für Ihre Anwendungen, wenden
Sie sich bitte an unseren technischen Vertrieb.
6.2. CE Zeichen
Alle Mess-Systeme der Baureihe HIT 1000 und HIT 1500 sind CE-konform entwickelt und
gefertigt (siehe Anhang 1: Konformitätserklärung).
6.3. ECE-Prüfzeichen
Alle Mess-Systeme der Baureihe HIT 1000 und HIT 1500 tragen das E-Zeichen und haben
eine internationale ECE Zulassung für den öffentlichen Straßenverkehr (siehe Kapitel
13.4 Umgebungsbedingungen.
6.4. UL-Zertifikat
Unter unserer UL-Zertifikatsnummer (siehe Kapitel 13.4 Umgebungsbedingungen)
können Sie alle nach UL zertifizierten Produkte der HYDAC ELECTRONIC GmbH einsehen.
7. Wartung und Instandhaltung
Alle Mess-Systeme der Baureihe HIT 1000 und HIT 1500 sind wartungsfrei. Falls trotzdem
Fehler auftreten wenden Sie sich bitte an die HYDAC Systems & Services GmbH.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959HIT 1000 / 1500 CANopen Safety 13
8. Montage
8.1. Allgemeine Montagehinweise
Das Mess-System wird über seine Flanschplatte direkt an der Arbeitsmaschine montiert.
Die Befestigung sollte nach Möglichkeit mit 4 Schrauben erfolgen.
D
Der Einbauort ist so zu wählen, dass der Einfluss von Vibrationen oder Schlägen
möglichst gering ist. Die Montage in unmittelbarer Nähe einer Krafteinleitung (z.B.
Kraftanschluss eines Hydraulikzylinders oder Motorträger des Hauptantriebs) kann sich
nachteilig auf das Messergebnis auswirken.
Unsere Erfahrungen haben gezeigt, dass Dämpfer zur Reduktion von Vibrationseinleitung
sehr sorgfältig dimensioniert werden müssen, da meist unterschiedliche Frequenzen
vorherrschen welche verschiedenes Dämpfungsmaterial erfordern.
Die Einbaulage ergibt sich aus der gewählten Variante gemäß Typenschlüssel -
Longitudinal bzw. Hauptachse und Lateral bzw. Nebenachse. Es ist zu beachten, dass der
Neigungswinkel immer als Drehwinkel um die jeweilige Achse berechnet wird. Die
Anordnung des Koordinatensystems ist in Kapitel 10 Koordinatensystem und
Drehrichtung beschrieben.
Im nachfolgenden Beispiel ist das Mess-System liegend auf dem Fahrzeugchassis montiert.
Die longitudinale Neigung soll mit der X-Achse, die Laterale mit der Y-Achse gemessen
werden. Dazu zeigt die Y-Achse in Fahrtrichtung (Steckverbinder zeigen zum Heck). Eine
Steigung bzw. ein Gefälle kann das Mess-System somit über die Drehung um die X-Achse
messen. Mit Hilfe der lateralen Achse (Y) kann die Querneigung zur Fahrtrichtung nach links
oder rechts gemessen werden – Drehung um die Y-Achse, siehe Abbildung 1.
Beispiel für den Typenschlüssel eines Mess-Systems mit dieser Ausrichtung:
HIT 1508-F11-X-180-Y-90-1-000
Abbildung 1 – Mess-System in Standardeinbaulage X-180-Y-90
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 66995914 HIT 1000 / 1500 CANopen Safety
8.2. Anforderungen an die mechanische Montage
Nachfolgende Montagehinweise sind für eine bestimmungsgemäße Verwendung einzu-
D halten:
Die Montagefläche ist so zu wählen, dass das Mess-System vollständig, plan und flächig
aufliegt. Die empfohlene Ebenheit der Montagefläche beträgt 0,1 mm.
Es ist darauf zu achten, dass das Gehäuse des Mess-Systems durch die Befestigung
keinen mechanischen Belastungen und keinen Verwindungskräften ausgesetzt wird.
Nichtbeachtung kann zu Undichtigkeit und in Folge davon zur Fehlfunktion des Mess-
Systems führen.
Für die Montage sollten Edelstahlschrauben verwendet werden. Diese Schrauben
sollten mit einem Anzugsdrehmoment von 5 ±0,1 Nm angezogen werden. Es ist darauf
zu achten, dass das Mess-System mit mindestens 3 Schrauben befestigt wird. Bei der
Auswahl der Position der Schrauben ist darauf zu achten, dass diese symmetrisch
angeordnet sind. Empfohlen wird jedoch die Befestigung mit 4 Schrauben jeweils
an den Gehäuseecken.
Durch Modifikation des Gehäuses können Undichtigkeiten am Mess-System auftreten
welche zu Fehlfunktionen führen können. Daher darf das Gehäuse nicht modifiziert
werden.
8.3. Anforderungen an die elektrische Montage
Bei der elektrischen Montage sind folgende Punkte für eine bestimmungsgemäße
Verwendung einzuhalten:
Verdrahtungsarbeiten, Öffnen und Schließen von elektrischen Ver-
bindungen nur im spannungslosen Zustand durchführen!
Kurzschlüsse, Spannungsspitzen usw. können zur Fehlfunktion, zu
unkontrollierten Zuständen der Anlage und zu erheblichen Personen-
und Sachschäden führen.
Der elektrische Anschluss ist von einem Fachmann nach den jeweiligen Landes-
vorschriften durchzuführen (z.B. VDE 0100 in Deutschland).
Es gelten die EMV-Normen: EN 61000-6-1, -2, -3 und -4. Die Forderungen der Normen
werden nur bei ordnungsgemäßer und fachmännischer Verkabelung und Erdung des
Gehäuses des Mess-Systems erreicht.
Bei Mess-Systemen mit zusätzlicher CAN-Buchse ist deren Schutzkappe vor dem
Einsatz des Mess-Systems zu entfernen und durch einen geeigneten Steckverbinder zu
ersetzen. Der Steckverbinder soll die für die Anwendung erforderliche IP-Schutzklasse
erfüllen.
o Die Nichtbeachtung kann zum Eindringen von Feuchtigkeit oder Feinstaub in
das Gehäuse führen und in Folge dessen zur Fehlfunktion.
o Bei Montage geeignetes Anzugsdrehmoment der Steckverbinder beachten!
Direkte Nähe zu Verbindungsleitungen von Leistungsverbrauchern oder störenden
Elektro- oder Elektronikgeräten, wie z.B. Frequenzumrichtern, ist möglichst zu
vermeiden.
Möglichst kurze Leitungsverbindungen herstellen.
Konfektionierte Leitungen mit ausreichendem Querschnitt verwenden.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959HIT 1000 / 1500 CANopen Safety 15
9. Anschlussbelegungen
In Abbildung 2 ist die Belegung der Steckverbinder des Mess-Systems dargestellt. Die
rechts dargestellte „Buchse M12x1, 5-pol.“ ist nur bei Mess-Systemen mit zusätzlicher CAN-
Buchse vorhanden (siehe Kapitel 14 Typenschlüssel). Die Nummerierung ist in Blick-
richtung auf den Steckverbinder dargestellt.
D
Das Mess-System besitzt keinen internen CAN-Abschlusswiderstand.
Zur Terminierung kann die im Kapitel 16 Elektrisches Zubehör aufgeführte Bus-Terminie-
rung verwendet werden. Bei Mess-Systemen mit 2 Steckverbindern kann diese an der
rechten Buchse angeschlossen werden.
9.1. Darstellung Steckverbinder
Abbildung 2 zeigt die Anschlussbelegung von Stecker und Buchse.
Abbildung 2 – Anschlussbelegung
Stecker M12x1, 5-pol. Buchse M12x1, 5-pol.
9.2. Pinbelegung
Pin Signal Beschreibung
1 CAN_SHLD CAN shield
2 CAN_V+ CAN external positive supply
3 CAN_GND Ground / 0V / V-
4 CAN_H CAN_H bus line (dominant high)
5 CAN_L CAN_L bus line (dominant low)
Belegung gemäß CIA-DR-303 Part 1: Cabling and connector pin assignment
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 66995916 HIT 1000 / 1500 CANopen Safety
10. Koordinatensystem und Drehrichtung
Das Koordinatensystem des Mess-Systems ist bei allen Baureihen identisch und fest mit
D dem Mess-System verbunden (siehe Abbildung 3).
Abbildung 3 – Koordinatensystem und Drehrichtung
Auf dem Typenschild ist das Koordinatensystem, wie in Abbildung 4 dargestellt,
aufgedruckt:
Abbildung 4 – Typenschild und Rechte-Hand-Regel
Koordinatensystem auf Typenschild Rechte-Hand-Regel
Die Bestimmung des jeweiligen Neigungswinkels entspricht einer Drehung um die jeweilige
Achse (siehe Beispiel in Kapitel 8 Montage).
Die positive Drehrichtung wird dabei mit der „Rechte-Hand-Regel“ bestimmt. Dabei zeigt der
Daumen in Pfeilrichtung des Koordinatensystems und die Krümmung der Finger in Richtung
eines positiven Drehwinkels. Bezogen auf das o.g. Beispiel würde eine Steigung in
Fahrtrichtung (Longitudinal bzw. Hauptachse X) mit einem positiven Winkel gemessen
werden.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959HIT 1000 / 1500 CANopen Safety 17
11. Produktbeschreibung
Die Mess-Systeme der Familie HIT 1000 und HIT 1500 sind ein- bzw. zweiachsige Mess-
Systeme zur Erfassung der Neigung bezogen auf die horizontale Ebene. Ein solches Mess-
System wird auch Neigungsgeber genannt. D
Das Mess-System verfügt über sehr präzise und robuste Sensorzellen auf MEMS Basis
(Micro-Electro-Mechanical System). Durch herausragende Temperatur- und EMV-
Eigenschaften, sowie die kompakte Bauform sind die Mess-Systeme im mobilen Bereich in
einem breiten Anwendungsfeld einsetzbar.
Zur Erfüllung der Anfoderungen an die erhöhte funktionale Sicherheit verfügt das Mess-
System über redundante Sensorzellen. Die Architektur der sicheren Mess-Systeme
entspricht Kategorie 2 (ISO 13849) bzw. 1oo1 (EN 61508) oder Kategorie 3 (ISO 13849)
bzw. 1oo2 (EN 61508). Die verwendete Architektur kann über den Typenschlüssel
ausgewählt werden (siehe Kapitel 14 Typenschlüssel).
11.1. Neigungsmessung
Die Berechnung des Neigungswertes kann in einer oder zwei der 3 Raumachsen erfolgen.
Ausgegeben wird die Neigung Longitudinal (Haupt- oder Primärachse) und die Neigung
Lateral (Neben- oder Sekundärachse). Die verbleibende Achse ist die Rotation um die
Vertikale. Die Lage der Longitudinal- und Lateral-Achse im Raum wird bei der Bestellung
über den Typenschlüssel festgelegt (siehe Kapitel 14 Typenschlüssel).
Der maximale Messbereich Longitudinal (Haupt- oder Primärachse) beträgt ±180°.
Der maximale Messbereich Lateral (Neben- oder Sekundärachse) beträgt ±90°.
Die Reihenfolge der Eulerwinkel ist immer Longitudinal vor Lateral, also Hauptachse vor
Nebenachse.
11.1.1. Statische Neigung [funktional sicher]
Beide Produktfamilien - HIT 1000 und HIT 1500 - liefern ein Signal „statische Neigung“,
das hervorragend zur Nivellierung von Maschinen oder Maschinenteilen geeignet ist. Dieses
Signal wird aus den Einzelkomponenten eines Mehrachs-Beschleunigungssensors
berechnet und stellt in Ruhe den absoluten Neigungswinkel in Bezug zur horizontalen
Ebene dar.
Anwendungen mit erhöhten Anforderungen an die funktionaler Sicherheit können
dieses Signal zur sicheren Überwachung der Neigung verwenden. Das Signal kann als
CANopen SRDO (Safety-Relevant Data Object) zur Verfügung gestellt werden.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 66995918 HIT 1000 / 1500 CANopen Safety
11.1.1.1. Auswertung
Gültig ist das Signal nur in Ruhelage des Sensors und in Kombination mit dem
Statussignal der „statischen Neigung“. Das Statussignal liefert wichtige Informationen
D über die Gültigkeit des Neigungssignals und sollte in der Anwendung ausgewertet werden
(siehe Kapitel 1.7 Bestimmungsgemäße Verwendung).
Für eine korrekte Auswertung der Neigung muss sich der Sensor beim
Anlegen der Spannungsversorgung sich für ca. 5 s „in Ruhe“ befinden,
es sollte also keine Maschinenbewegung vorliegen.
Da die Berechnung des Signals „statische Neigung“ auf den aktuellen
Werten der Beschleunigungskomponenten beruht, wird das Signal durch
externe Beschleunigungen (z.B. durch Abbremsen, Beschleunigen oder
Kurvenfahrt eines Fahrzeuges) beeinflusst.
Das Statussignal der statischen Niegung beinhaltet ein Kennzeichen, welches anzeigt,
dass eine störende, externe Beschleunigung vorliegt – „Gerät in Bewegung“. Ist dieses
Kennzeichen gesetzt, so kann dem aktuellen Signalwert „statische Neigung“ nicht
vertraut werden. Im Umkehrschluß kennzeichnet das nicht gesetzte Signal den zuvor
beschriebenen Zustand „in Ruhe“.
Bei Auslieferung ist die Übertragung der Signale „statische Neigung“ Longitudinal, Lateral
sowie des zugehörigen Statussignals über das SRDO1 vorkonfiguriert (siehe Kapitel
12.2.2 Voreinstellung).
Eine detaillierte Beschreibung der bestimmungsgemäßen Signalaus-
wertung finden Sie im zugehörigen Safety-Manual.
Die Beschreibung über den Aufbau der Signale finden Sie in der
zugehörigen Protokollbeschreibung.
11.1.1.2. Signalverlauf
Das Signal wird über einen Tiefpass gefiltert und hat daher eine Verzögerung gegenüber
dem wahren Wert. In der Standardversion erreicht das Ausgangssignal bei einem
gedachten Sprung in der Neigung nach 0,5 s ca. 63 % des aktuellen Endwertes, nach 1,0 s
ca. 86 % des Endwertes, nach 1,5 s ca. 95 % des Endwertes, nach 2,0 s ca. 98 % des
Endwertes und nach 2,5 s ca. 99 % des Endwertes (siehe Abbildung 5).
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959HIT 1000 / 1500 CANopen Safety 19
Abbildung 5 - Sprungsignalverlauf
D
11.1.2. Bewegungskompensierte Neigung
Mess-Systeme der Baureihe HIT 1500 liefern zusätzlich zum Signal „statische Neigung“ ein
dynamisches, bewegungskompensiertes Neigungssignal. Die bewegungskompensierte
Neigung wird durch die Fusionierung zweier komplementärer Signale errechnet. Damit
werden dynamische Nivellierungsaufgaben während der Maschinenbewegung ermöglicht.
Das Signale „bewegungskompensierte Neigung“ darf nicht ohne zusätz-
liche Maßnahme zur Plausibilisierung in Funktionen mit erhöhten
Anforderungen an die funktionale Sicherheit verwendet werden.
Das Mess-System selbst kann keine hinreichend belastbare Zustands-
information für die bewegungskompensierte Neigung liefern.
Die Fusionsfilter der HYDAC Mess-Systeme berechnen aus 6 unabhängigen Eingangs-
größen (DoF; Degrees of Fredom; Freiheitsgrade) die Systemgröße „bewegungskom-
pensierte Neigung“. Basis hierfür ist je ein Beschleunigungs- sowie ein Drehratensensor,
welcher in jeweils 3 unabhängigen Raumachsen Messwerte erfassen kann.
11.1.2.1. Filterauswahl
Zur Berechnung der bewegungskompensierten Neigung stehen zwei Filteralgorithmen
zur Wahl. Beide Filter basieren auf unterschiedlichen mathematischen Verfahren zur
Signalfusionierung. Jedes dieser Verfahren hat seine besonderen Stärken. Welcher Filter
für die jeweilige Anwendung geeignet ist, sollte der Anwender vor der Inbetriebnahme
entscheiden.
Der jeweils aktive Filter kann über ein Parameterobjekt im Mess-System geändert und ge-
speichert werden. Dieser Parameter wird beim Start des Mess-Systems ausgewertet.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 66995920 HIT 1000 / 1500 CANopen Safety
11.1.2.2. Komplementärfilter
Der Komplementärfilter gewichtet die Messwerte der einzelnen Sensorelemente, Beschleu-
D nigung und Drehrate abhängig von störenden, äußeren Beschleunigungen. So wertet dieser
Filter das Ergebnis der Winkelberechnung auf Basis der Beschleunigungs-komponenten
sehr stark, wenn keine äußere Beschleunigung erkannt wurde. Liegt jedoch eine von der
Erdanziehung abweichende äußere Beschleunigung vor, so wird der Neigungswinkel ver-
stärkt über das zeitliche Integral der Drehrate berechnet.
Der Komplementärfilter ist bei Auslieferung des Mess-Systems zur
Berechnung der bewegungskompensierte Neigung voreingestellt.
Maßgeblich für die Eignung dieses Filters ist, dass Einflüsse durch externe Beschleunigun-
gen nur kurzfristig, d.h. im Sekundenbereich, anliegen. Vibrationen mit hoher Vibrations-
amplitude (> 1 m/s²) oder auch größere Zentrifugalkräfte, welche bei höheren Rotations-
geschwindigkeiten oder größerer räumlicher Ausdehnung der Maschine entstehen, können
zu einer fehlerhaften Bewertung der Neigung führen.
Ein typisches Anwendungsbeispiel wäre ein Lade- oder Mobilkran.
Die Verstellgeschwindigkeiten dieser Maschinen sind in der Regel so,
dass ein Mensch der Bewegung noch ausweichen kann. Mögliche
Funktionen wären Kippschutz oder Erfassung des Auslegerwinkels. Beim
Einsatz von zwei Sensoren am unteren und oberen Ende eines Auslegers
kann auch dessen Durchbiegung unter Last gemessen werden.
Ein Beispiel für eine wenig geeignete Anwendung wäre ein Kompakt-
bagger, welcher im zügigen Umschlagbetrieb Erdaushub durchführt.
Wird der Filter in diesem Zustand betrieben, so kann dies zu einer
deutlichen Drift des Neigungssignals führen.
Ein Vorteil dieses Filters ist, dass das zuvor beschriebene Verhalten im Mess-System
erkannt werden kann. Anhand der bereitgestellten Statusinformation kann der Anwender in
der Bewegungssituation ermitteln, ob die dynamischen Grenzen des Mess-Systems
eingehalten werden. Im Falle einer Überschreitung können so geeignete Gegenmaß-
nahmen ergriffen werden – z.B. Reduktion der Bewegungsgeschwindigkeit.
11.1.2.3. Erweiterter Kalman-Filter
Für Anwendungen mit höheren Anforderungen an die Dynamik bieten die HYDAC Mess-
Systeme der Baureihe HIT 1500 einen weiteren Fusions-Filter – den Kalman-Filter - an.
Diese Art von Filter versucht aus störbehafteten Einzelmesswerten über ein mathe-
matisches Modell einen auf Statistik basierenden Schätzwert für eine nicht messbare
Systemgröße zu bilden - die Neigung. Bedingung hierfür ist, dass die gesuchte System-
größe sich durch eine Bewegungsgleichung (räumlicher, zeitlicher Zusammenhang eines
mechanischen Systems) beschreiben läßt. Durch Iteration versucht dieser Filter aus
Schätzung und nachfolgender Korrektur immer das Optimum zwischen den Störungen und
dem gesuchten Systemsignal zu erreichen.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959HIT 1000 / 1500 CANopen Safety 21
Der Vorteil dieses Filters ist, dass sich dynamische Systeme sehr gut
abbilden lassen. So werden Vibrationen gut gefiltert und langanhaltende
dynamische Situationen führen nicht zu einer Drift des Ausgangssignal.
D
Die Einschränkung ist darin zu sehen, dass sich diese Art von Filtern innerhalb des Mess-
Systems nicht beobachten lassen. Daher kann dieser Filter keine Statusinformation zur
Beurteilung der Genauigkeit des aktuell vom Filter ermittelten Neigungssignals anbieten.
Auf Grund unserer Erfahrungen mit Maschinen kann in dynamischen Situationen von einer
mittleren systembedingten Abweichung vom wahren Neigungswert von 0,5° bis 2°
ausgegangen werden. Die maximale Abweichung ist jedoch stark vom jeweiligen
Maschinenverhalten abhängig.
Durch Bereitstellung eines extern erfassten Geschwindigkeitssignals kann die Berechnung
des kompensierten Neigungssignals in manchen Situationen verbessert werden. Die EKF
Implementierung des HIT 1500 stellt dazu einen optionalen Geschwindigkeitseingang zur
Verfügung. Nähere Informationen zu diesem Signal finden sie in der zugehörigen
Protokollbeschreibung.
11.1.3. Sonderfälle
11.1.3.1. Eingeschränkter Messbereich
Bei einem Mess-System mit eingeschränktem Messbereich erfolgt bei einer Überschreitung
des eingeschränkten Messbereichs ein Sprung auf den jeweiligen Richtungs-Maximal-
endwert der betroffenen Achse, also + oder -180° bzw. + oder -90°. Bei der Überprüfung
der Messwertgrenze wird ein Toleranzwert von 1° zugrunde gelegt.
Abbildung 6 stellt den Zusammenhang zwischen der tatsächlichen Neigung des Mess-
Systems und dem ausgegebenen Neigungssignal dar.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 66995922 HIT 1000 / 1500 CANopen Safety
Abbildung 6 – Ausgangssignal Winkeleinschränkung
D
Beim beispielhaft dargestellten Mess-System sind beide Achsen auf 60° beschränkt. In der
Abbildung ist die longitudinale Achse (im Beispiel die X-Achse) dargestellt, Im Bereich von
±60° wird der tatsächliche Messwert ausgegeben. Wird jedoch ein Wert von z.B. > +61°
erreicht so wird der maximale Endwert der Hauptachse von +180° ausgegeben.
11.1.3.2. Messachse in Richtung Erdbeschleunigung
Liegt z.B. der Neigungswinkel der lateralen Achse (Neben- oder Sekundärachse) im Bereich
von ±90°, wird der Neigungswinkel der longitudinalen Achse (Haupt- oder Primärachse)
nicht mehr erfassbar, da diese dann in die Richtung der Erdbeschleunigung g zeigt. Der
Neigunswinkel der longitudinalen Achse ist in diesem Bereich nicht mehr eindeutig bestimm-
bar.
Der Neigungswinkel einer Achse, Longitudinal oder Lateral, kann nur
dann gemessen werden, wenn dieser nicht mit der Achse der Erd-
beschleunigung zusammenfällt.
Nach einer Drehung um die Nebenachse (Y; Lateral) um +90° zeigt die X-Achse
(Longitudinal) in Richtung der Erdbeschleunigung g (ehemals die Richtung der Z-Achse),
siehe Abbildung 7. Eine weitere Bewegung um die X-Achse wird in diesem Zustand zur
Rotation um die um die Vertikale und ist keine Neigung.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959HIT 1000 / 1500 CANopen Safety 23
Abbildung 7 - Achsorientierung nach 90° Drehung
Ausgangslage 90° Drehung um Y
D
Beispiel: HIT 1508-F11-X-180-Y-90-1-000
Sobald der kritische Winkelbereich verlassen wird, kann die Neigung in longitudinaler
Richtung wieder erfasst werden.
11.2. Zusätzliche Signale
11.2.1. Beschleunigungssignal [funktional sicher]
Außer den Neigungswerten können alle Mess-Systeme der Baureihe HIT 1000 und
HIT 1500 auch die normierten Beschleunigungskomponenten [m/s²] des Beschleunigungs-
sensors (ACC) in 3 Raumachsen zur Verfügung stellen. Für Anwendungen mit erhöter
funktionaler Sicherheit können die Beschleunigungskomponenten zur Übertragung als
SRDO konfiguriert werden.
Bei Verwendung des Beschleunigungssignals mit erhöhten Anforde-
rungen an die funktionale Sicherheit, ist es notwendig das Kennzeichen
„Abweichung der Beschleunigung“ aus dem Status der „statische
Neigung“ auszuwerten.
Das Beschleunigungssignal kann zur Optimierung von Regelfunktionen,
der Beschränkung von Lastmomenten oder der Erkennung von Überlast
der Maschinenkonstruktion, z.B. verursacht durch Stöße, verwendet
werden.
11.2.2. Drehratensignal [funktional sicher]
Bei Mess-Systemen der Baureihe HIT 1500 stehen zusätzlich noch die normierten Signal-
komponenten des Drehratensensors (Gyroskop; GYRO), die Winkelgeschwindigkeit [°/s], in
den 3 Raumachsen zur Auswertung bereit. Für Anwendungen mit erhöter funktionaler
Sicherheit können die Komponenten der Winkelgeschwindigkeit zur Übertragung als SRDO
konfiguriert werden.
Bei Verwendung des Signal „Drehrate/Winkelgeschwindigkeit“ in Anwen-
dungen mit erhöhten Anforderungen an die funktionale Sicherheit, ist es
notwendig das Kennzeichen „Abweichung der Winkelgeschwindigkeit“
aus dem Status der „statische Neigung“ auszuwerten.
Mit der Drehrate (Winkelgeschwindigkeit) können leistungsfähige
unterlagerte Regelfunktionen, wie eine Beschränkung oder Regelung der
Verstellgeschwindigkeit eines Auslegers, realisiert werden.
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 66995924 HIT 1000 / 1500 CANopen Safety
12. Protokolldaten
12.1. Protokollbeschreibung
D Die entsprechende Protokollbeschreibung finden Sie zum Download auf unserer Homepage
unter:
(http://www.hydac.com/de-de/produkte/sensorik/show/Material/index.html)
Produkte Sensorik Produktsuche
Bei Eingabe der Materialnummer (9xxxxx) erscheint die entsprechende ZIP Datei
(EDS_9xxxxx_HIT1XXX-XXX-X-XXX-X-XX-X-XXX.ZIP), welche die Protokollbeschrei-
bung enthält.
Bei Mess-Systemen mit CANopen Schnittstelle, ist das für die Parametrierung hilfreiche
elektronische Datenblatt (EDS Datei) zusätzlich enthalten.
12.2. CANopen
12.2.1. Allgemeines
Weitere Informationen entnehmen Sie bitte der “Protokoll-Beschreibung CANopen Safety
HIT 1000 / 1500“.
Communication Profile CiA DS 301 V4.2
NMT-Services CiA DSP 302 V4.1
Layer Setting Services and Protocol CiA DSP 305 V2.2
Device Profile CiA DS 410 V1.3
CANopen Safety CiA DS 304 V1.0.1
Baudraten 10 kbit/s .. 1 Mbit/s gem. DS 305 V2.2
Profile einstellbar über Manufacturer
Node Id und Baudrate
Specific & LSS
Übertragungsdienste
SRDO statische Neigung, ACC, GYRO, Status
PDO Messwerte als 16-bit Wert, Status
Transfer synchron, asynchron, zyklisch
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959HIT 1000 / 1500 CANopen Safety 25
12.2.2. Voreinstellung
Nachfolgend die Liste der CANopen Voreinstellung bei Auslieferung des Mess-Systems:
Allgemeine
Einstellungen
Baudrate:
Node-ID
250 kbit/s
1
D
Power ON Status Pre-Operational
SRDO1 Transmiss. Type 254
Direction transmit
Refresh/SCT 10 ms
SRVT 5 ms
Byte 1, 2 statische Neigung Longitudinal
INTEGER16; 0,01 °/Bit
Byte 3, 4 statische Neigung Lateral
INTEGER16; 0,01 °/Bit
Byte 5 Status statische Neigung
UNSIGNED8
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 66995926 HIT 1000 / 1500 CANopen Safety
13. Technische Daten
Der Anschluss der Versorgungsspannung ist gegen Verpolung und Überspannung
D geschützt.
Ist eine Kenngröße im Datenblatt auf eine bestimme Mess-System Baureihe beschränkt, so
ist diese mit der Baureihenbezeichnung gekennzeichnet, z.B. HIT 1500.
Nur Kenngrößen mit dem Vermerk [funktional sicher] dürfen für Funktionen mit erhöhter
Anforderung an die funktionale Sicherheit verwendet werden.
13.1. Eingangskenngrößen
Eingangskenngrößen kennzeichen Eigenschaften der Messzellen, die zur Signalauf-
bereitung der Ausgangssignale des Mess-Systems herangezogen werden.
13.1.1. Neigung
Liste der Kenngrößen welche die Qualität und die Eigenschaften der berechneten Signale
“statische” und “bewegungskompensierte” Neigung kennzeichnen.
Kenngrößen Neigung
Achsen 1/2
Messbereich longitudinal ±180
°
(Primärachse) (±15 / ±60 / ±120 möglich)
Messbereich lateral ±90
°
(Sekundärachse) (±15 / ±60 möglich)
Auflösung ° 0,01
Temperaturkoeffizient
°/10K typ. (RMS) < 0,03 | max. 0,06
(-20 bis +60 °C)
Langzeitstabilität °/1000h typ. (RMS) < 0,1 | max. 0,15
Statisch [funktional sicher]
Dynamik Hz 2 (-3 dB)
Genauigkeit ° typ. (RMS) < 0,1 | max. 0,2
Wiederholbarkeit ° typ. (RMS) < 0,05 | max. 0,1
Bewegungskompensiert HIT 1500
Dynamik Hz 50 (-3 dB)
Update Rate Hz 200
13.1.2. Beschleunigung (ACC) [funktional sicher]
Kenngrößen der Beschleunigungssensorik
Achsen 3
Messbereich m/s² ±30 in 3 Achsen
Auflösung m/s² 0,01
Grenzfrequenz Hz 50 (-3 dB)
Genauigkeit m/s² typ. (RMS) < 0,02 | max. 0,04
Temperaturkoeffizient (m/s²)/
typ. (RMS) < 0,005 | max. 0,01
(-20 bis +60 °C) 10K
(m/s²)/
Langzeitstabilität typ. (RMS) < 0,01 | max. 0,02
1000h
Stand: 30.09.2020 HYDAC ELECTRONIC GMBH Mat. Nr.: 669959Sie können auch lesen