Industrielle Servicerobotik - Band 4 Studie - BMWi
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Band 4 Industrielle Servicerobotik Studie

Impressum
Herausgeber Das Bundesministerium für Wirtschaft und
Bundesministerium für Technologie ist mit dem Grundzertifikat
Wirtschaft und Technologie (BMWi) zum Audit Beruf & Familie® als familien-
Öffentlichkeitsarbeit freundlicher Arbeitgeber ausgezeichnet
11019 Berlin worden. Das Zertifikat wird von der Beruf &
www.bmwi.de Familie gemeinnützige GmbH, einer
Initiative der gemeinnützigen Hertie-
Stiftung verliehen.
Stand
Januar 2013
Druck Diese Broschüre ist Teil der Öffentlichkeitsarbeit des Bundesmi-
Elch Graphics Digitale- und Printmedien GmbH und Co KG nisteriums für Wirtschaft und Technologie. Sie wird kostenlos
abgegeben und ist nicht zum Verkauf bestimmt. Nicht zulässig
ist die Verteilung auf Wahlveranstaltungen und an Informati-
Gestaltung und Produktion
onsständen der Parteien sowie das Einlegen, Aufdrucken oder
LoeschHundLiepold Kommunikation GmbH, Berlin
Aufkleben von Informationen oder Werbemitteln.
Bildnachweis
Titel, Seite 13, 17: rorarob
Seite 8: TU Berlin
Seite 10: Parrot
Seite 14: PCK
Seite 16: STILL
Seite 17: SaLsA
Seiten 21, 30: AutoPnP
Redaktion
Begleitforschung zum Technologieprogramm AUTONOMIK:
Institut für Innovation und Technik
in der VDI/VDE Innovation + Technik GmbH, Berlin
LoeschHundLiepold Kommunikation GmbH, Berlin
Text
Institut für Innovation und Technik
in der VDI/VDE Innovation + Technik GmbH, Berlin
Inhaltsverzeichnis
1. Einführung – Definition – Markt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2. Aktuelle Anwendungsfelder und Anwendungen der Servicerobotik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1 Einsatz in industriellen Anwendungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Assistenzroboter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Serviceroboter zur Überwachung und Intervention . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Serviceroboter zur Exploration, Inspektion und Wartung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14
3. Beispiele industrieller Servicerobotik aus den AUTONOMIK-Projekten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4. Entwicklungsperspektiven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.1 Wahrnehmung von und Navigation in der Welt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2 Lernfähigkeit und Adaptivität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3 Autonome Interaktion mit der Umgebung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.4 Sichere Mensch-Roboter-Interaktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.5 Energiebedarf und Lebensdauer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.6 Forschungsschwerpunkte in den genannten Anwendungsfeldern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5. Softwarebasis für autonome Systeme, Referenzarchitektur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6. Aktuelle Schlaglichtbefragung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
7. Schlussfolgerungen und Handlungsempfehlungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
7.1 Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
7.2 Empfehlungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
AUTONOMIK „Autonomik – Autonome Systeme und simulati- onsbasierte Systeme für den Mittelstand“ ist ein Technologieprogramm des Bundesministeriums für Wirtschaft und Technologie. Bei AUTONOMIK geht es um zukunftsweisende Ansätze für die Entwick- lung einer neuen Generation von intelligenten Werkzeugen und Systemen, die eigenständig in der Lage sind, sich via Internet zu vernetzen, Situatio- nen zu erkennen, sich wechselnden Einsatzbedin- gungen anzupassen und mit Nutzern zu interagie- ren. Insgesamt haben sich 14 Projektverbünde, u. a. zu fahrerlosen Transportsystemen, robotischen Assistenten, autonomen Logistikprozessen und Klinikanwendungen für eine Förderung durch das BMWi qualifiziert. Die Projekte haben eine Laufzeit von durchschnittlich drei Jahren. Rund 100 Un- ternehmen und wissenschaftliche Einrichtungen wirken an den Vorhaben mit. Das Projektbudget beträgt zusammen ca. 110 Mio. Euro. Die Projekte sind: AGILITA, AutASS, AutoBauLog, AutoPnP, DyCoNet, LUPO, marion, RAN, RoboGasInspector, rorarob, SaLsA, simKMU, smartOR, viEMA.
5
1. Einführung – Definition – Markt
Der Siegeszug der Robotik in Produktionsumgebungen ist nicht mehr aufzuhalten. Nicht zuletzt die rasante Entwick-
lung der Robotik hat einen großen Anteil an der internationalen Wettbewerbsfähigkeit der deutschen Wirtschaft.
Glaubt man den Experten, steht uns nun nach einem halben Jahrhundert der dominanten Industrierobotik ein halbes
Jahrhundert der Servicerobotik bevor. Die Zahlen belegen diesen Trend.
Mit etwa 2,9 Milliarden Euro Umsatz (2011) weltweit Seit 1998 wurden insgesamt mehr als 110.000 Service
beansprucht die Servicerobotik zwar momentan noch Roboter für den professionellen Einsatz in dieser Sta-
einen relativ kleinen Anteil am Gesamtumsatz der tistik gezählt:
Robotik-Branche. Seit 2003 steigen die weltweiten
Einsatzzahlen von Servicerobotern jedoch im Schnitt Laut der Studie World Robotics 2012 Service Robots
um über 20 Prozent jährlich. wird für die Jahre 2012 bis 2015 ein weltweites Markt-
volumen von 12,7 Milliarden Euro prognostiziert. Die
Die Gesamtzahl der im Jahr 2011 verkauften, professi- Hälfte dieses Umsatzes wird durch den Militärbereich
onellen Serviceroboter stieg um 9 % im Vergleich zum und für landwirtschaftliche Anwendungen generiert.
Jahr 2010 (16.408 Einheiten im Vergleich zu 15.027). Weltweit existieren derzeit über 100.000 eingesetzte
Mehr als 1,5 Millionen Roboter werden 2015 weltweit im Einsatz sein
'000 of units
1800
2013 – 2015:
+ 8 % per year on average
1600
1400
+ 10 %
1200
1000
800
600
400
200
0
2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012* 2013* 2014* 2015*
2002 – 2015 (forecast)
Quelle: Worlds Robotics 2012, VDMA
6 1. Einführung – Definition – Markt
Serviceroboter-Systeme und belegen die technische
und wirtschaftliche Machbarkeit der Automatisierung trieroboter nicht hat. Serviceroboter zeichnen sich
eines weiten Spektrums an Dienstleistungstätigkeiten. generell durch größere Flexibilität und höhere
Autonomie aus. Es wird ihnen möglich sein, zu-
Auch nach Einschätzung der EU sind autonome, mo- künftig viele Aufgaben und Assistenzhandlungen
bile Roboter für die Produktion, Logistik und Dienst- anstelle eines oder in Ergänzung zum Menschen
leistung für die Wettbewerbsfähigkeit von Europa auszuführen. Dabei agieren sie als sogenannte
von strategischer Bedeutung bei der Fertigung in der Co-Worker, um in enger Kollaboration mit dem
Hochlohnregion Europa. Menschen komplexe Aufgaben zu erledigen.
Insofern sind erste, in der Industrie eingesetzte
Für das Jahr 2025 darf erwartet werden, dass die Serviceroboter nicht für die Massenproduktion
Servicerobotik zum zentralen Element in Wertschöp- entwickelt worden, sondern um höherwertige,
fungsketten wird und einen entscheidenden Wettbe- individuelle Handlungen, häufig (semi-) autonom
werbsvorteil für die deutsche Wirtschaft darstellt. Im ausführen zu können.
Vordergrund stehen hier die Zahlen für Servicerobotik-
produkte im Bereich Militär, Sicherheit, Überwachung,
Reinigung und mobile Plattformen. Hieraus kann Servicerobotik als Schlüssel zu effizienterer
zumindest für Serviceroboter zur Überwachung und Wertschöpfung
Intervention sowie autonom agierende Serviceroboter
ein spürbares Marktwachstum in den nächsten zehn Aber nicht nur die Zahlen belegen das wirtschaftli-
Jahren abgeleitet werden. che Potenzial der Servicerobotik. In einer durch den
demographischen Wandel beständig älter werdenden
Gesellschaft gewinnt die Rolle assistierender Ser-
viceroboter sowohl im privaten als auch betrieblichen
Servicerobotik Kontext zunehmend an Bedeutung. Im Jahr 2035 wird
in Deutschland mehr als die Hälfte der Bevölkerung
Mit dem Begriff Industrielle Servicerobotik wer- 50 Jahre oder älter und jeder Dritte älter als 60 Jahre
den robotische Systeme bezeichnet, die nicht wie sein. Qualifizierte Mitarbeiter werden ein knappes Gut.
bei der Industrierobotik nahezu ausschließlich in Daher ist zu erwarten, dass der Servicerobotik eine
der Fertigung von Massenprodukten eingesetzt wesentliche Rolle in der industriellen Produktion zu-
werden, sondern als Folge ihrer erweiterten Fähig- fallen wird, um die wachsende demographische Lücke
keiten in vielen Anwendungsfeldern innovative zu füllen.
Prozesse und Dienstleistungen ermöglichen. Die
Verbindung aus Service und Robotik impliziert die Wegen ständig steigender Lebenserwartung und
Verbindung eines Dienstes oder einer Dienstleis- sinkender Geburtenrate sind in Japan bereits mehrere
tung für den Menschen, während Robotik auf die Initiativen gestartet worden, um Serviceroboter zu
automatische und i.d.R. selbstständige Ausführung entwickeln. Diese sollen sowohl assistive Aufgaben
der betreffenden Dienstleistung abzielt. Demnach zur Unterstützung älterer Menschen übernehmen, als
wird heute unter einem Serviceroboter ein meist auch insgesamt die geringere Anzahl an arbeitsfähigen
mobiler Roboter verstanden, der Dienstleistungen Menschen ergänzen. Obwohl die Lage in Deutschland
entweder in direkter Kollaboration mit dem Nut- nicht ganz so dramatisch wie in Japan ist, muss auch
zer oder völlig autonom erbringt. Der Servicero- hier mit einem schnell anwachsenden Bevölkerungs-
boter unterscheidet sich somit grundlegend von anteil älterer Menschen gerechnet werden.
einem Industrieroboter, da er zur Durchführung
seiner Aufgaben besondere Fähigkeiten benötigt Auch die Akzeptanz für Serviceroboter nimmt weiter
(z. B. Umfelderfassung und Interpretation, Lernfä- zu. Die private Nutzung von einfachen Servicerobotern
higkeit, einfache Instruierbarkeit), die ein Indus- wie Staub- oder Rasenmähroboter tragen ihren Teil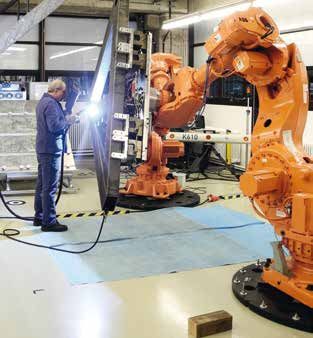
1. Einführung – Definition – Markt 7
dazu bei. Ob als Unterstützung im Alltag Älterer oder finden sich etwa in der Sprach- oder Gestensteuerung.
als effiziente Helfer in der Produktion: die Servicero- Ziel der Entwicklungen ist eine einfache und zuverläs-
botik entwickelt sich langfristig zu einem wichtigen sige Kommunikation, die auch Laien-Anwender in die
Wertschöpfungsfaktor im Dienstleistungs- und Lage versetzt, den Serviceroboter sicher zu bedienen.
Produktionssektor. Besondere Potenziale vielseitig ein- Eine Schlüsselrolle in der Mensch-Technik-Interaktion
setzbarer und anpassungsfähiger Serviceroboter liegen kommt dabei auch der Lernfähigkeit robotischer Syste-
im Bereich kleiner und mittlerer Unternehmen (KMU). me zu. Erst die Anpassungsfähigkeit an neue Situatio-
In spezialisierten Produktionsprozessen und bei nen und Aufgaben ermöglicht den flexiblen Einsatz der
kleineren Stückzahlen können Serviceroboter ökono- Serviceroboter.
misch sinnvoll eingesetzt werden. Investitionen in die
Servicerobotik werden von großem volkswirtschaft-
lichen Interesse sein, um auch in Zukunft die für den Ländervergleich
Wohlstand Deutschlands erforderliche Wertschöpfung
sicherstellen und wirtschaftlich weiterhin eine interna- Die Servicerobotik hat sich in verschiedenen Industrie-
tionale Spitzenposition einnehmen zu können. staaten unterschiedlich schnell entwickelt. In einigen
Ländern ist die Serviceroboterdichte deutlich höher
als in anderen. Die Gründe für diese Fokussierung auf
Herausforderungen der Servicerobotik: einige wenige Länder liegen unter anderem bei den
Sicherheit, Kosten, Nutzerfreundlichkeit vielfältigen notwendigen Voraussetzungen für die
Entwicklung und den Einsatz von hochentwickelten
Serviceroboter müssen sicher sein, damit sie auto- Servicerobotern. Als weitere Ursachen für diese Ent-
nom mit Menschen zusammenarbeiten und sich wicklung sind eine innovationsfreudige Robotik-In-
ein Arbeitsumfeld teilen können. Voraussetzungen dustrie, ein notwendig hoher Automatisierungsgrad in
dafür sind unter anderem eine leistungsfähige Umge- der traditionellen industriellen Produktion, aber auch
bungserkennung, kurze Reaktionszeiten und ein hohe Unterschiede in der Technikaffinität und Nutzerakzep-
Intelligenz der Serviceroboter-Systeme. Einheitliche tanz der Bevölkerung zu nennen.
Sicherheitsstandards bei Hard- und Softwarekompo-
nenten und die Weiterentwicklung rechtlicher Rah- Technologisch ist Deutschland in der Industrierobotik
menbedingungen sind ein weiterer wichtiger Schritt, sehr gut aufgestellt und steht gemeinsam mit Japan
um die Akzeptanz innerhalb der Anwendergruppen und Korea an der Spitze. Die Automobilindustrie und
zu steigern und die Verbreitung von Servicerobotern die Elektronikindustrie sind die Treiber der Ent-
voranzutreiben. wicklung. In Deutschland sind viele technologische
Innovationen, die auch die Servicerobotik betreffen,
Neben Sicherheitsaspekten ist auch die Reduzierung aus der industriellen Robotik hervorgegangen. In Japan
von Anschaffungs-, Betriebs und Wartungskosten, und Korea dagegen, Ländern, in denen eine besonders
sowie das Angebot flexibler Finanzierungsmodelle für hohe Serviceroboterdichte anzutreffen ist, existiert
Betriebe ein wichtiger Faktor, um das Wachstumspo- ein eindeutiger Fokus auf den Heimbereich bei Ser-
tenzial der Servicerobotik weiter auszubauen. vicerobotern. Zudem kann bereits auf erste Ansätze
von definierten Hard- und Softwareschnittstellen
Einheitliche Hard- und Softwarestandards ermöglichen zurückgegriffen werden, die durch Modularisierung
eine einfache Verknüpfung unterschiedlicher System- einfache Austauschbarkeit der Komponenten, soge-
komponenten nach dem „Baukasten-Prinzip“. Zuliefe- nanntes „Plug&Play“, ermöglichen. In beiden Ländern
rer können so höhere Stückzahlen produzieren und die werden Serviceroboter bereits vielfach in öffentlichen
Produktionskosten für Serviceroboter weiter senken. Einrichtungen, wie zum Beispiel Krankenhäusern zum
Für eine effektive Zusammenarbeit von Mensch und Transport bzw. an Grenzübergängen zur Überwachung,
Serviceroboter ist eine einfache und intuitive Bedie- aber auch in Privathaushalten, zum Beispiel als Haus-
nung Voraussetzung. Viel versprechende Ansätze haltsroboter zum Reinigen von Böden, eingesetzt.
8 1. Einführung – Definition – Markt
Hand-Exoskelett
Weiterhin ist bei der Bevölkerung dieser asiatischen In China sind bisher in erster Linie Industrieroboter im
Länder traditionell sowohl eine größere Technikaffini- Einsatz. Es wird damit gerechnet, dass China spätestens
tät als auch Technikakzeptanz vorzufinden. Insgesamt bis 2015 in diesem Bereich die meisten Roboter welt-
sind dennoch als Barrieren für weitere erfolgreiche weit einsetzen wird.
Serviceroboter-Anwendungsfelder technologische
und ökonomische, aber auch gesellschaftliche Aspekte Es werden zukünftig in Europa, Asien und in den USA
wesentlich. erhebliche Mittel zur Verfügung stehen, deren Auswir-
kungen sich jedoch erst in den nächsten Jahren zeigen
In den Vereinigten Staaten werden Serviceroboter werden. Aktuellen Schätzungen zufolge stellt sich der
wie der Staubsauger Roomba zwar ebenfalls bereits Vergleich zwischen Aktivitäten und den erreichten
millionenfach eingesetzt, die meisten industrienahen Ergebnissen wie folgt dar:
Serviceroboter werden jedoch aus Asien oder Europa
importiert. Als technologische Innovatoren fungieren
in den USA vor allem Rüstungsunternehmen und mili-
tärische Forschungsprogramme.
1. Einführung – Definition – Markt 9
Bereiche der Robotik / Grad der Aktivitäten, Ergebnisse und Bewertung
Servicerobotik
USA China Japan Korea Europa Deutschland
Universitäre Grundlagenforschung sehr hoch gering hoch mittel mittel hoch
Anwendungsbezogene mittel gering sehr hoch hoch hoch hoch
Industrieforschung (nationale
Labors in Zusammenarbeit)
Nationale oder multinationale mittel k. A. sehr hoch sehr hoch hoch hoch
Forschungsinitiativen oder
Programme
Forschung-Industrie-Politik Part- gering k. A. sehr hoch sehr hoch hoch hoch
nerschaften, Unternehmenskoope-
rationen
Roboter-Fahrzeuge: gut / sehr gut k. A. gering gering gut gut
Militär und Zivil
Weltraumrobotertechnik sehr gut k. A. gering k. A. mittel mittel
Humanoide Roboter gering k. A. sehr gut gut gering gering
Industrieroboter: gering gering sehr gut gering mittel sehr gut
Fertigung
Serviceroboter: gering k. A. mittel gut mittel mittel
sonstige, nicht in der Fertigung
Personenbezogene Roboter: mittel k. A. gut gut mittel mittel
Wohnung
Biologische / gut k. A. gering gering gut gut
biomedizinische Anwendungen
Tabelle 1: Bereiche der Servicerobotik, Aktivitäten und Ergebnisse der Länder
Quelle: Einschätzung der VDI / VDE - IT 2012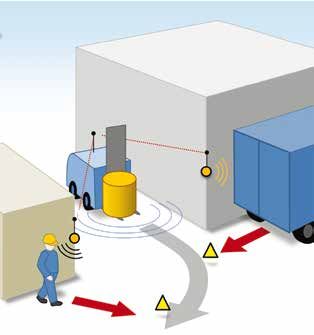
10
2. Aktuelle Anwendungsfelder und
Anwendungen der Servicerobotik
Es wird erwartet, dass in Deutschland – anders als etwa in Asien – die Diffusion der Servicerobotik über den Weg
neuester, für die Servicerobotik adaptierbarer Entwicklungen aus der Industrierobotik stattfinden wird.
Die Servicerobotik bietet Funktionalitäten, die von Regel autonom, sind mit einer Reihe von Sensoren zur
heutigen Industrierobotern nicht erreicht werden. Erfassung der Umgebung ausgestattet, sind energie-
So können u. a. eigentlich schwer automatisierbare autark (Batterien) und besitzen ein Mindestmaß an
Arbeitsabläufe durch robotische Assistenz wesentlich „Intelligenz“, um u. a. den Abgleich von Umwelt-
unterstützt werden. informationen auf die Aufgabenstellung vornehmen
zu können. Die Kommunikation mit anderen Sys-
Besonders deutlich werden die Unterschiede in An- temen oder mit dem Menschen muss üblicherweise
wendungsbereichen der kommerziellen und privaten über Drahtlossysteme sowie optische und akustische
Servicedienstleistungen. Hier leisten bereits heute Schnittstellen geschehen. Auch wurden bereits erste
sogenannte Wachroboter, die in ihrer Wirtschaftlich- Prototypen von Servicerobotern, die im industriellen
keit und Effizienz unumstritten sind, wertvolle Dienste. Umfeld den Werker bei seiner Arbeit unterstützen, im
Auch für andere Anwendungsfelder gibt es bereits realen Einsatz getestet.
kommerziell verfügbare Lösungen. Dazu zählen
Von besonderer Bedeutung für Servicerobotik-Sys-
→
Floorcleaner, teme sind Antworten auf die Frage, unter welchen
Voraussetzungen Serviceroboter für eine Vielzahl von
→
Exoskelette, Anwendungsbereichen wirtschaftlich einsetzbar sind
→
autonome Transportfahrzeuge und und welche technischen oder technologischen Hürden
→
autonome Flugsysteme zur Überwachung. hierzu in naher Zukunft überwunden werden müssen.
Die im Folgenden dargestellte Tabelle zu Anwendungs-
Die bereits vorhandenen Fähigkeiten von Servicerobo- bereichen und Anwendungsfeldern entstand durch
tern decken also einen Bereich ab, der von klassischen die Klassifizierung der aktuellen Entwicklungen im
Industrierobotern nicht erreicht und auch nicht erwar- Themenfeld der Servicerobotik.
tet wird. Die realisierten Serviceroboter agieren in der2. Aktuelle Anwendungsfelder und Anwendungen der Servicerobotik 11
Anwendungsfelder und -Bereiche der Servicerobotik
Anwendungsfelder
Industrie Kommerzielle Häuslicher Sicherheit Raumfahrt
Dienstleistung Service
Robotischer Arbeiter 3.1 3.1
(autonom)
Robotischer Co-worker 3.2 3.2
Assistenzroboter
(Roboter-Mensch)
Anwen- Logistik Roboter
dungs-
bereiche Roboter zur Überwa- 3.3
chung und Intervention
Roboter zur Exploration, 3.4
Inspektion und Wartung
Roboter zur
Schulung und für Spiele
Tabelle: 2
Quelle: VDI / VDE-IT
Die in Tabelle 2 hervorgehobenen Anwendungsfelder te Aufgaben selbstständig und unbeaufsichtigt zu
decken die Anwendungsszenarien und Bereiche ab, die bearbeiten. Man könnte diesen Robotertyp auch als
sowohl nach Ansicht der Autoren als auch von inter- einen autonom agierenden Serviceroboter bezeichnen,
nationalen Fachkreisen1 zukünftig für eine Vielzahl der beliebig oft und einfach an die durchzuführenden
von Applikationen an Bedeutung gewinnen können. Arbeitsprozesse angepasst werden kann. Im Vorder-
Die Darstellung kann als Anhaltspunkt in Bezug auf grund steht die Fertigung kleiner Serien. Durch diese
zukünftig tragfähige und wirtschaftlich relevante Ent- Fähigkeiten könnten robotische Arbeiter prinzipiell
wicklungen lohnenswerter Felder verstanden werden auch im Bergbau, in der Forst- und Landwirtschaft,
und markiert auch die Bereiche der Servicerobotik, beim Recycling und Rückbau sowie bei der Wartung
in denen bereits erste Entwicklungen stattgefunden und Reinigung eingesetzt werden.
haben.
Die Aktionen der robotischen Arbeiter werden im All-
gemeinen nicht durch den Menschen, sondern von den
2.1 Einsatz in industriellen Anwendungen zu bearbeitenden Objekten ausgelöst. Auch Prozesse
können hier die Aktionen bestimmen. Die in diesem
Die Vorstufe zum Assistenzroboter, der mit dem Bereich verfügbaren Anwendungen sind u.a. Roboter
Menschen innerhalb eines industriell durchzuführen- für die schnelle und adaptive Fertigung für geringe
den Prozesses interagiert, ist der robotische Arbeiter. bis mittlere Stückzahlen in einem begrenzten Umfeld
Er wird als ein weitgehend autonomer Fertigungsro- (heute aufgrund von Beschränkungen und möglichen
boter angesehen, der in der Lage ist, innerhalb eines Gefährdungen meist in einer Fertigungszelle).
festgelegten Rahmens flexibel und adaptiv bestimm-
1
Diskussionen im Rahmen der Automatica 2012, HMI 2012 und und des EUROP-Meetings Odense 201212 2. Aktuelle Anwendungsfelder und Anwendungen der Servicerobotik
Voraussetzung dafür sind die gegenüber bisherigen Erste Entwicklungen sind für den kommerziellen
Industrierobotern verbesserten Fähigkeiten auf der Einsatz in der Werkstatt und industriellen Produktion
Basis neuer Sensorik, Sensorfusion und Software. Sie von Kleinserien vorgesehen, allerdings sind in Zukunft
ermöglichen auch die einfache Anpassung an Ände- auch Anwendungen in der Agrar- und Forstwirtschaft,
rungen im Arbeitsprozess durch robotereigenes Pro- der Bauwirtschaft, im Handwerk oder im häuslichen
zesswissen und intelligente Verfahren der Instruktion Bereich (Home Care) denkbar. Aber auch Assistenz-
durch einen Menschen. funktionen im medizinischen Bereich, insbesondere
im Krankenhaus (OP-Roboter, Rehabilitation, etc.)
Neben den ortsfest agierenden Servicerobotern ge- kommen für eine Umsetzung infrage.
winnen mobile Servicerobotik-Systeme an Bedeutung.
Sie können sich je nach auszuführendem Prozess z. B. Die aktuellen Entwicklungen haben vor allem ein
auf vorgegebenen Bahnen zwischen den jeweiligen hohes Maß an Alltagstauglichkeit und eine einfache
Arbeitsplätzen bewegen. Zur Umgebungserfassung „Unterweisung“ des Serviceroboters im Fokus. Dabei
und Navigation ist ein gewisser Grad an „Intelligenz“ soll das System wesentliche Instruktionen z. B. durch
und „Lernfähigkeit“ erforderlich. Betreffende Systeme „Zeigen“ und „Vormachen“ erlernen. Jedoch sind die
haben das Prototypenstadium noch nicht wesentlich taktilen Fähigkeiten (Tastsinn) sowie die Erfassung
überschritten. und Interpretationen der Umgebungen (Recognition,
Tracking, Classification) in Echtzeit noch nicht ausrei-
In allen genannten Bereichen sowie im industriellen chend entwickelt. Aktuelle Forschungen befassen sich
Umfeld werden bereits heute erste robotische Systeme u.a. mit der Entwicklung leistungsfähiger Mensch-Ma-
getestet. Obwohl die hier adressierten robotischen schine-Interfacees (HMI) zur Instruktion derartiger
Systeme eine nur geringe oder bedingt vorhandene Servicerobotik-Systeme. Die dabei bisher erreichten
Alltagstauglichkeit aufweisen, werden sie heute bereits Ergebnisse sind ermutigend, jedoch für einen kommer-
als Serviceroboter bezeichnet, da ihre Fähigkeiten für ziellen Einsatz noch nicht ausreichend.
die Servicerobotik von hoher Bedeutung sind.
Fähigkeiten wie die Wiederholgenauigkeit, das Tragen
und genaue Positionieren unterschiedlich schwerer
2.2 Assistenzroboter Objekte sind aufgrund leistungsfähiger Sensorik und
Adaptionsfähigkeit bereits Stand der Technik und im
Robotische Co-Worker oder Assistenzroboter sind industriellen Einsatz nötig. Auch die Erstellung eines
aufgrund ihrer dynamischen Menschmodells, das eine unabdingbare
1. im Rahmen des vorgegebenen Kontextes Voraussetzung zur Darstellung der Mensch-Robo-
frei bestimmbaren Funktionalität, ter-Kooperation (MRK-Applikationen) ist, wurde be-
reits erfolgreich getestet und in realistischen Demons-
2. Adaptionsfähigkeit an entsprechende Prozesse, trationen gezeigt (u.a. AUTONOMIK-Projekt rorarob).
3. s ensorischen Fähigkeiten wie Umgebungs- Die betreffenden Entwicklungen befinden sich in der
erfassung in Echtzeit, Erprobungsphase.
4. L
ernfähigkeit bzw. leichten Instruierbarkeit
und ihrer In der Industrie eingesetzte Systeme (Bosch) können
zwar hinreichend akkurat Aufgaben in einem ver-
5. Kommunikationsfähigkeit mit dem Menschen teilten Fertigungsprozess durchführen, die Übergabe
des bearbeiteten Werkstücks an den Menschen hängt
als echte Serviceroboter zu verstehen. Der robotische jedoch davon ab, wann dieser mit seinen Arbeiten
Co-Worker ist speziell für die Zusammenarbeit mit fertig ist. Bisher muss der Werker ein Signal geben (z. B.
dem Menschen vorgesehen. Kennzeichnend ist die den Knopfdruck), damit der Serviceroboter weiß „jetzt bin
Menschen (Arbeiter) in unterschiedlichem Arbeitskon- ich wieder dran“. Mit entsprechender Intelligenz könn-
text unterstützende Funktion. Die Anwendungsberei- te der Serviceroboter diesen Moment selbst erkennen.
che können sehr breit gestreut sein.2. Aktuelle Anwendungsfelder und Anwendungen der Servicerobotik 13
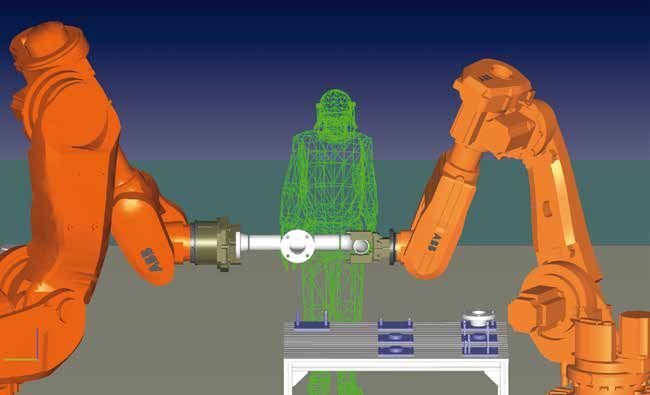
rorarob-Montagesimulation
Dieser sehr klein anmutende Schritt, das Mitdenken im 2.3 Serviceroboter zur Überwachung
Prozess, stellt jedoch sehr hohe Anforderungen an die und Intervention
perzeptive Intelligenz und an das Kontextwissen des
Roboters. Zusätzlich ist ein Minimum an Lernfähigkeit Serviceroboter zur Überwachung und Intervention
notwendig, um sich auf Varianzen im Prozess einstel- sind in der Regel mobile und autonom agierende
len zu können. Zwischen kooperierenden Robotern Serviceroboter. Diese Klasse von Servicerobotern führt
wird diese Fähigkeit größtenteils durch die übergeord- im Gegensatz zum Co-Worker ihre Funktionen völlig
nete Prozesssteuerung ersetzt. autonom, also nicht notwendigerweise in direkter Ko-
operation mit Menschen, aus. Kennzeichnend sind je
Es zeigt sich, dass das Thema Mobilität einen zusätzli- nach Anwendungsbereich die erforderliche Mobilität,
chen Komplexitätsgrad darstellt, der durchaus un- die Fähigkeit zur Navigation in einer unstrukturierten
abhängig vom eigentlich durchzuführenden Prozess und ggf. sich bewegenden Umgebung, die Fähigkeit,
behandelt werden kann. Im industriellen Umfeld sind dieses Umfeld zu erkennen, zu interpretieren und zu
intelligente Hol- und Bringdienste (z. B. Werkstück klassifizieren sowie Objekte zu verfolgen (recogni-
annehmen, transportieren, Werkstück anreichen; tion, tracking and classification). Zur Durchführung
AUTONOMIK-Projekt: AGILITA) im Fokus der Be- der spezifischen Aufgaben muss ein gewisses Maß
trachtung. Im Unterschied zu einem Fahrerlosen an „Intelligenz“ und „Lernfähigkeit“ vorhanden sein.
Transportsystem (FTS) sind jedoch die Assistenzfunk- Zudem sind besondere Fähigkeiten zum Austausch von
tionalitäten zur Übergabe eines Werkstücks an den Informationen aller Art, zum Beispiel mit anderen Sys-
Werker bzw. Übernahme vom Werker wesentlich. temen oder Servicerobotern erforderlich. Die Kommu-
nikation findet drahtlos statt, beispielsweise mit nicht
störbaren Kommunikationsverfahren.14 2. Aktuelle Anwendungsfelder und Anwendungen der Servicerobotik
Die größten Anforderungen werden an Serviceroboter
zur Überwachung und Wartung in Gebäuden oder auf
dem Gelände gestellt. Hier sind vor allem robuste und
störungssichere Fortbewegungsmodule (Mobilitäts-
plattformen) erforderlich, die über eine zuverlässige
Steuerung und Koordination verfügen. Gleiches gilt
für die Navigation. Für den Einsatz in bzw. aus der Luft
oder unter Wasser sind diese Anforderungen erstaunli-
cherweise weniger komplex, weil es weniger Probleme
mit Hindernissen gibt (Balkenproblem).
Inzwischen ist die Entwicklung derartiger Systeme
weit fortgeschritten. Ursache hierfür sind vor allem
die Bemühungen der USA, konventionelle Systeme im
Bereich Verteidigung und „Homeland Security“ durch
automatische bzw. autonome Systeme zu ersetzen
(Aufklärungsdrohnen und Drohnen zur Intervention RoboGasInspector findet Gaslecks
sind aktuell im Einsatz u.a. in Afghanistan und Pakis-
tan). Die zur Verfügung stehenden Finanzmittel sind
hier um ein vielfaches höher als diejenigen für zivile Während sich ein an Land operierender Inspektions-
bzw. kommerzielle Entwicklungen. und Wartungsroboter per Funk, GPS und weitere
Kommunikations- und Lokalisierungsverfahren orien-
Die betreffenden Systeme werden heute weitgehend tieren kann, ist dies unter Wasser nur mithilfe weiterer
aus militärischen Entwicklungen abgeleitet. Im pri- Orientierungs- und Navigationsverfahren möglich. Sie
vaten Umfeld ist diese Klasse von Servicerobotern u.a. sorgen dafür, dass sich der Inspektions- und War-
mangels Bedarf, Akzeptanz und aufgrund der hohen tungsroboter genau orientieren, selbst lokalisieren
Systempreise kaum anzutreffen. und parallel dazu eine Karte der eigenen Umgebung
erstellen bzw. sich anhand einer vorgegebenen Karte
orientieren kann.
2.4 S erviceroboter zur Exploration,
Inspektion und Wartung Die Beurteilung des zu prüfenden Gutes (Unterseeka-
bel) oder der zu messenden Parameter (CH4-Gehalt)
Serviceroboter zur Exploration, Inspektion und wird von am Serviceroboter vorhandenen Sensoren
Wartung haben in der jüngsten Vergangenheit eine oder Sensorclustern ermöglicht. Besitzt der Ser-
wachsende Aktualität gewonnen. Einsatzszenarien wie viceroboter die entsprechende „Intelligenz“, ist eine
sie bei dem Reaktorunfall in Fukushima entstanden, unmittelbare Aus- und Bewertung der vorgefundenen
befeuern die Entwicklungen entsprechender Ser- Situation und damit die direkte Intervention möglich
vicerobotersysteme. Ein weiteres Anwendungsfeld sind (z. B. Absperren eines Ventils; AUTONOMIK-Projekt:
sogenannte AUV’s (Autonomous Underwater Vehicle) RoboGasInspector). Allerdings wird für die Wartung
zur Inspektion von Pipelines und Unterseekabeln. ein geeigneter Manipulator benötigt.
Diese Arbeiten werden heute noch häufig von RUV’s
(Remote controlled Underwater Vehicle’s) erledigt, also
von schiffsgeführten Missionen mit entsprechendem
Technik-, Personal- und Kosteneinsatz. Gleiches gilt für
die Erkundung von submarinen Lagerstätten und das
Auffinden von verlorengegangenem Gut (Reaktorkerne
russischer U-Boote in der Barentssee).15
3. Beispiele Industrieller Servicerobotik aus den
AUTONOMIK-Projekten
AutoBauLog ponenten ohne großen Aufwand ausgetauscht oder
bestehende Robotersysteme erweitert werden können.
Im Projekt AutoBauLog werden Baumaschinen einer
Großbaustelle intelligent vernetzt, so dass sie ihre Situa- Der Austausch mit oder die Erweiterung um einzelne
tion im Zusammenhang mit den ihnen übertragenen Komponenten ist innerhalb eines Serviceroboter-Sys-
Aufgaben wahrnehmen, bewerten und optimieren kön- tems nur möglich, wenn die einzelnen Bestandteile
nen. Dazu werden sie in die Lage versetzt, als weitgehend miteinander kompatibel sind. Diese Plug&Play-Fähig-
eigenständige und zielgesteuerte Einheiten zu handeln. keit der Komponenten verkürzt nicht nur den Produk-
tionsaufwand der Maschinen, sondern ermöglicht auch
Die im Projekt AutoBauLog eingesetzten servicero- eine kostengünstigere und schnellere Wartung.
botischen Baumaschinen sollen selbständig mitei-
nander kooperieren und damit einen effektiveren AutoPnP entwickelt eine offene Software-Infrastruk-
Baustellenbetrieb ermöglichen. Eine wesentliche Rolle tur, in die neue Komponenten wie Prozessoren, Sen-
spielt dabei die sinnvolle Koordination der einzelnen soren und Aktoren unkompliziert integriert werden
Akteure, wie Bagger, LKW oder Walzen. Um unge- können, ähnlich neuer Software-Module beim PC.
wollte Leerlaufphasen im Bauprozess zu vermeiden Gleichzeitig erforscht das Projekt, wie Serviceroboter
ist es notwendig, dass sich die einzelnen Maschinen ihr Zusammenspiel, z. B. in einer Produktionsstraße,
miteinander absprechen. Gleichzeitig müssen sie möglichst autonom organisieren können. Analog zur
kontinuierlich über den Baufortschritt berichten. Die Informationstechnik, bei der eine sogenannte ser-
Informationen zu den einzelnen Bauprozessen müssen viceorientierte Architektur (SOA) dazu dient, Dienste
an zentraler Stelle zusammengeführt, strukturiert und einheitlich zu beschreiben und wieder verwendbar
übersichtlich aufbereitet werden. zu machen, zielt AutoPnP auf die Entwicklung einer
neuen Grundlage für eine standardisierte Beschreibung
Durch intelligente Software und Sensorik werden die von Diensten, Komponenten und Schnittstellen in der
Baumaschinen in die Lage versetzt, ihre Situation im Automatisierungstechnik.
Zusammenhang mit den ihnen übertragenen Aufgaben
wahrzunehmen und sich zu Maschinenteams zu for-
mieren. Dadurch wird eine weitreichende Kooperation marion
der am Bauprozess beteiligten Maschinen möglich. Die
Planungsphase des Bauprozesses wird durch Simulati- Ziel des Projekts marion ist eine Roboterisierung von
onen unterstützt, auf deren Basis dann die Prozesssteu- Arbeitsprozessen mit autonomen Fahrzeugen unter
erung erfolgt. Hierzu werden die von den einzelnen Berücksichtigung des gesamten landwirtschaftlichen
Fahrzeugen bereitgestellten Daten in einem zentralen Wertschöpfungsprozesses. Alle beteiligten Maschinen
Leitstand zusammengeführt. Für eine effektive Koor- müssen hierfür miteinander kooperieren. Dafür ist es
dination und Prozesskontrolle werden die aktuellen nicht nur notwendig, dass die Maschinen wie Mähdre-
Prozessdaten der beteiligten Baumaschinen laufend scher oder Traktoren auf Veränderungen in der Um-
mit den vorgegebenen Prozessdaten verglichen. Die gebung eigenständig reagieren können, sondern auch,
Visualisierung des Bauprozesses geschieht mit Hilfe dass sie sich untereinander absprechen und sicher
von Virtual-Reality-Software. So haben die verant- zusammenarbeiten. Auch die Interaktion zwischen
wortlichen Baustellenbetreiber zu jeder Zeit Einsicht in autonomen und personengeführten Fahrzeugen stellt
die servicerobotischen Bauprozesse. eine wesentliche Herausforderung dar.
Durch die Fusion unterschiedlicher Sensoren in Kom-
AutoPnP bination mit Ortungssystemen können die Maschi-
nen die jeweils vorliegende Situation bewerten. Das
Das Projekt AutoPnP entwickelt einheitliche Hard- Planungsergebnis wird dann per Funk an die mitei-
und Softwarestandards, damit einzelne Roboterkom- nander vernetzten mobilen Maschinen übertragen.16 3. Beispiele Industrieller Servicerobotik aus den AUTONOMIK-Projekten
Autonomes FTS der Still GmbH
Dies versetzt die Fahrzeuge in die Lage, den gesamten wendig, dass der Serviceroboter sich selbst lokalisiert
Ernteprozess vollkommen eigenständig durchführen und parallel dazu eine Karte der eigenen Umgebung er-
zu können. Über eine intelligente Planungssoftware stellt. Diese SLAM-Fähigkeit, Simultaneous Localization
kann der Anwender darüber hinaus die ökonomischen and Mapping, ist grundlegend für die sichere Mobilität.
und ökologischen Kriterien des Planungssystems indi-
viduell gewichten. Eine vorausschauende Simulation Die autonome und mobile Serviceroboterplattform,
unterstützt die Optimierung der Planung. Die entwi- die im RoboGasInspektor verwendet wird, kann sich
ckelten Technologien sind auch auf andere Automa- durch eine GPS-Lokalisation und RFID-Unterstützung
tisierungsszenarien im innerbetrieblichen Transport innerhalb eines Geländes verorten. Durch die Vernet-
übertragbar. zung mit dem Internet können nicht lokal gemessene
oder gespeicherte Daten übermittelt werden, wie z. B.
aktuelle Wetter- oder Anlageninformationen. Darüber
RoboGasInspector hinaus kann der RoboGasInspektor so mit anderen
Robotern und dem Anwender kommunizieren.
Wie Roboter frühzeitig Gaslecks in technischen Anla-
gen finden, zeigt das Projekt RoboGasInspektor. Dort
wird ein innovatives Mensch-Maschine-System mit in- rorarob
telligenten, kooperierenden und mit Gasfernmesstech-
nik ausgestatteten Inspektionsrobotern entwickelt. Ziel des Projekts rorarob ist die Entwicklung ei-
So können Inspektionen von technischen Anlagen nes Roboterassistenzsystems zur Bearbeitung von
weitgehend autonom bewältigt werden. Schweißaufgaben in der Rohr- und Rahmenfertigung.
Die Interaktion zwischen Mensch und Maschine unter
Damit ein Serviceroboter vorbestimmte Wegpunkte ergonomischen und ökonomischen Aspekten ist ein
autonom anfahren kann, muss er sich innerhalb eines wesentlicher Aspekt des Projekts.
Raumes genau orientieren können. Hierfür ist es not-3. Beispiele Industrieller Servicerobotik aus den AUTONOMIK-Projekten 17
Der Roboter unterstützt den Schweißer bei seiner Arbeit Sichere und schnelle Fortbewegung durch Umgebungsbild
Um den Schweißer bei seiner Arbeit zu unterstützen, SaLsA
muss der Roboter das Werkstück in die für den Arbeits-
prozess günstige Position bewegen. Dabei darf jedoch SaLsA entwickelt autonome Transportfahrzeuge, die
kein Sicherheitsrisiko für den beteiligten Facharbeiter sich im Außenbereich sicher und schnell in einer ge-
entstehen. Für das Zusammenfügen der komplexen meinsamen Arbeitsumgebung mit klassischen perso-
Konstruktionen sind darüber hinaus zusätzliche Daten nengeführten Fahrzeugen und Personen bewegen.
über Werkstoffe und Werkzeuge nötig. Diese müssen
dem Schweißer während des Arbeitsprozesses zur Ein wichtiger Faktor für die Verbreitung von Service-
Verfügung gestellt werden. robotern ist ihre Fähigkeit, sich autonom, sicher
und schnell bewegen zu können. Bisher können sich
Eine 3D-Kamera überwacht den Fertigungsprozess, beispielsweise Fahrerlose Transportfahrzeuge (FTF)
damit der Facharbeiter während des Schweißens nicht aufgrund von Sicherheitsbestimmungen nur sehr lang-
aus Versehen vom Roboter gestoßen und verletzt wird. sam bewegen. Besonders auf großen Betriebsgeländen
Sie erfasst den Arbeiter und fertigt ein jeweils aktuelles ist ein effektiver Transport so nur bedingt möglich. Um
3D-Modell an. Die Software errechnet ein Gesamtbild sich jedoch schnell und sicher fortbewegen zu können,
von Mensch und Maschine und verhindert dadurch müssen die Roboter andere Verkehrsteilnehmer wie
ungewollte Kollisionen. Online übertragene Daten zu Fußgänger oder personengeführte Fahrzeuge erkennen
den verwendeten Schweiß-Komponenten informieren und sie in ihre Routenplanung integrieren. Potenziel-
den Arbeiter zusätzlich über Materialbeschaffenheit le Gefahrensituationen müssen frühzeitig erkannt
oder Werkzeuge. werden. Die Transportroboter müssen dafür über ein
Umgebungsbild verfügen, das über den Sichtbereich
der Fahrzeuge hinausgeht.18 3. Beispiele Industrieller Servicerobotik aus den AUTONOMIK-Projekten
Zur Gewährleistung eines sicheren autonomen Fahrens Wichtig für den flexiblen Wechsel zwischen Hand- und
kombiniert SaLsA Daten aus Fahrzeugsensoren und automatisierter Montage ist die Möglichkeit, neue
stationären Sensoren sowie weiteren Informationsquel- Tätigkeiten ohne kompliziertes Anleiten schnell zu
len wie Kartendaten oder Prozessinformationen. Diese erlernen. Gleichzeitig muss er die Fähigkeit besitzen
Informationen werden zu einem Gesamtmodell der Werkstücke zu erkennen, von einer Ablage zu greifen
aktuellen Umgebungssituation verknüpft und ermög- und einen Werkstückträger an einer vordefinierten
lichen SaLsA, auch schwer einsehbare Umgebungen Stelle einzufügen.
wahrzunehmen. Der Serviceroboter kann so „um die
Ecke schauen“. Das aus den unterschiedlichen Sensor- Durch die Entwicklung sogenannter Einlern- und Aus-
daten kombinierte Umgebungsmodell ergibt zusammen führungsstrategien können Arbeiter den Roboter „an
mit Vorhersagetechniken einen Planungshorizont für die Hand“ nehmen und mit neuen Aufgaben vertraut
die möglichen Bewegungen aller mobilen Objekte. So machen. In einer Objekt- bzw. Skill-Datenbank werden
können die Transportroboter eine sichere Bahnplanung vordefinierte und erlernte Bewegungsabläufe gespei-
und Spurführung entwickeln. chert und können bei Bedarf wieder abgerufen werden.
Über das Internet oder andere Netzwerkverbindun-
gen kann der Roboter auch auf externe Datenbanken
viEMA zugreifen und Bewegungsabläufe von anderen Robo-
tern integrieren. Die sensorgestützte Wahrnehmung
viEMA entwickelt ein skalierbares, roboter- und sen- ermöglicht dem viEMA-Roboter eine 3D-Objekter-
sorgestütztes Montagekonzept, das je nach Situation den kennung und ein sicheres Greifen und Anordnen von
Wechsel von Hand- auf Automatenmontage zulässt. Gegenständen.19
4. Entwicklungsperspektiven
Neben den bereits genannten Herausforderungen Sicherheit, Kosten und Nutzerfreundlichkeit sind für die Mensch-
Serviceroboter-Kollaboration nachfolgend aufgeführte weitere Forschungsarbeiten notwendig. Nur ein möglichst
interdisziplinäres, paralleles und eng verzahntes Entwickeln aller im Gesamtsystem erforderlichen Komponenten
wird letztlich eine optimale Systemlösung hervorbringen können.
4.1 Wahrnehmung von und Navigation lich wie beim Menschen, durch aktive Exploration der
in der Welt Umwelt Daten gesammelt und bewertet werden. Dies
ist sowohl für die Robotik- als auch für die Kognitions-
forschung absolut wesentlich. Dabei bedeutet Lernen
Eine immer noch bestehende Kernproblematik für den
auch, Abstraktionen zu entwickeln und Begrifflich-
erfolgreichen Einsatz von mobilen Servicerobotern
keiten oder Sichtweisen zu finden, die das Erfahrene
stellt die Verbesserung der Wahrnehmungsfähigkeiten
beschreib-, handhab- und überschaubar machen.
dar, um in schneller Geschwindigkeit die Umgebung
Grundsätzlich wird auf diese Art und Weise aus den
akkurat zu erfassen und zu interpretieren, Hindernisse
Fehlern gelernt und die Komplexität von Bewegungen
zu erkennen und Objekte zur Bearbeitung zu identifi-
und Handlungen reduziert. Das Ziel solcher Verfahren
zieren und zu verfolgen. Bei beinahe allen autonomen
ist letztlich, aktuelle Sensorinformationen so zu nutzen,
Servicerobotern ist der Einsatz von „intelligenten“ Sen-
dass immer nur das der jeweiligen Situation angemes-
soren vorgesehen, die die eigene Standortbestimmung
senste Verhalten verwendet wird. Auf diese Weise wird
und Umgebungserfassung vornehmen bzw. erleichtern.
die Fähigkeit zur Anpassung an die Umwelt forciert,
die für einen angemessenen Einsatz in dynamischen
Ein wesentliches Ziel wissenschaftlicher Forschung ist
Umgebungen essentiell ist.
auch das 3D-Sehen in Echtzeit. Dazu ist der Einsatz von
verbesserter Sensorik notwendig, die in Kombination
mit neuen, fortgeschrittenen Verfahren zur Informa-
4.3 Autonome Interaktion mit der
tions- und Sensorfusion für eine deutlich verbesserte
Umgebung
Datenbasis für die Umgebungserkennung und Ob-
jektidentifikation sorgen soll. Die aktuelle Forschung Um erfolgreich verschiedene Aufgaben autonom
beschäftigt sich zum Beispiel mit in Spielkonsolen durchzuführen, ist neben entsprechend fortgeschrit-
eingebauten, und damit günstig verfügbaren, Tiefen- tenen Wahrnehmungsfähigkeiten und geeigneten
bild-Sensoren (Microsoft Kinect als separates Addon zu Adaptions- beziehungsweise Lernfähigkeiten auch
Microsofts X-Box), die ein relativ genaues Bild der Um- eine direkte Interaktionsfähigkeit mit der Umwelt
gebung liefern, aber bei deren Sensorik die Objektun- von großer Bedeutung. Dabei spielen Fähigkeiten wie
terscheidung noch Schwierigkeiten macht. Weiterhin das Aufsammeln, Tragen und Positionieren (verkürzt
gibt es Bemühungen vieler Hersteller, entsprechende im englischen Sprachraum: „Pick-and-Place-Robots“,
Tiefenbildkamera-Sensorik weiter zu verkleinern und „bin-picking“) von beweglichen Objekten eine große
noch leichter integrierbar zu machen. Rolle. Eine große Herausforderung besteht hierbei vor
allem im Zusammenspiel aus „intelligenter“ taktiler
und optischer Sensorik und dem Manipulieren von
4.2 Lernfähigkeit und Adaptivität Objekten in einer unstrukturierten, dynamischen und
komplexen Welt, die das Planen und Ausführen von
Die Kognitionsforschung stellt einen weiteren wichti- Handlungen erschweren. Auch hierfür sind neben
gen Forschungs- und Entwicklungsschwerpunkt dar. einer besseren Datenbasis basierend auf immer präzi-
Zur Interpretation und Klassifikation der Umgebung serer Sensorik hochentwickelte Verfahren des maschi-
und von Objekten in der Umgebung ist neben verbes- nellen Lernens notwendig, die mittels probabilisti-
serter Sensorik eine entsprechende kognitive Leistung scher Techniken lernen und Entscheidungen treffen.
notwendig. Hier sind vor allem Verfahren des maschi- Prinzipiell sind auch die taktilen Fähigkeiten aktueller
nellen Lernens zu erwähnen, bei denen zum Teil, ähn- Serviceroboter noch nicht ausreichend entwickelt.20 4. Entwicklungsperspektiven
Mehrere aktuelle Forschungsstränge beschäftigen sich 4.5 Energiebedarf und Lebensdauer
zum Beispiel mit sensorischer Roboter-„Haut“, die über
eine große Empfindlichkeit gegenüber Berührungen Eine gewisse Unabhängigkeit von Energiequellen und
und Temperatureinflüssen verfügt. angemessene Ladezeiten sind für autonome Servicero-
boter essentiell. Ebenfalls wird besonders pflegeleichte
und wenig wartungsintensive Soft- und Hardware
4.4 Sichere Mensch-Roboter-Interaktion erforscht, die den dauerhaften Einsatz erleichtern und
ökonomisch Sinn machen sollen.
Beim Einsatz von industriellen Servicerobotern ist zu
erwarten, dass eine räumlich und arbeitsteilig enge
Kooperation von menschlichem und robotischem 4.6 Forschungsschwerpunkte in den
Arbeiter stattfinden wird. Ein wünschenswertes, aber genannten Anwendungsfeldern
noch nicht komplett umgesetztes Ziel aktueller For-
schung besteht dabei darin, über Einlernstrategien den 4.6.1 Assistenzroboter (3.1 und 3.2)
Roboter zu instruieren, so dass er Handlungen und Be-
wegungen unmittelbar an Ort und Stelle übernehmen In der Landwirtschaft steht je nach Einsatzart beson-
und ausführen kann. Intuitiv nutzbare Gesten- und ders die Wahrnehmung und Geschwindigkeit und
Sprachsteuerungen sollen gleichfalls für eine einfache- Wirtschaftlichkeit des Roboters im Vordergrund. Hier
re Programmierbarkeit, aber auch Steuerung sorgen. ist es erforderlich, dass zum Beispiel Ernteroboter
innerhalb kürzester Zeit reife von unreifen Früchten
Vor allem durch neuartige Sensorik, die im Zentrum unterscheiden können, wofür in Echtzeit arbeitende
vieler aktueller Forschungsprojekte steht, soll grö- optische Sensoren und ausreichend schnelle Aktorik
ßere Sicherheit bei der Mensch-Roboter-Interaktion nötig sind, um zum Beispiel Greif- und Manipulations-
erreicht werden, die vor allem gerade dann relevant bewegungen zu realisieren. Weiterhin ist entscheidend,
wird, wenn Roboter und Menschen direkt miteinander dass etwa Transportroboter auch in sehr unwegsamen,
arbeiten und die Gefahr einer Kollision oder sonstigen hügeligen Geländen in verschiedenen Witterungsver-
Gefährdung besteht. Zusätzlich wird auch die Gefahr hältnissen navigieren können müssen. Auch eine funk-
der Manipulation der Steuerungssoftware als poten- tionierende Hinderniserkennung und, falls gewünscht,
zielles Missbrauchsproblem gesehen und als weiterer die Fähigkeit, im Schwarm mit anderen Robotern
Forschungsbedarf identifiziert. Es wird erwartet, dass zusammen agieren zu können, ist von Bedeutung.
sicherheitsrelevante Aspekte einen deutlich höheren
Stellenwert als heute haben werden, sowohl bezüg- Während in der medizinischen Robotik vor allem
lich der Robustheit gegenüber Missbrauch, als auch sehr präzises, lokales Arbeiten gefordert ist, und die
hinsichtlich der Betriebssicherheit (Safety & Security). Mobilität keine große Rolle spielt, ist der Anspruch an
Bei der engen Zusammenarbeit zwischen Mensch und die Mobilität bei Pflegerobotern generell eher groß.
Roboter wird ebenfalls eine Erkennung des menschli- In der medizinischen Robotik sollen Roboter zumeist
chen Verhaltens inklusive seiner Intention durch den innerhalb einer Operationssaal-Umgebung Ärzten und
Roboter angestrebt, um eine bessere Kollaboration anderen medizinischen Kräften helfen, zum Beispiel
zu ermöglichen. Umgekehrt soll das Verhalten des indem sie medizinische Instrumente anreichen oder
Roboters für den Menschen jederzeit vorhersehbar und tatsächlich bei der Operation assistieren. Hierfür
nachvollziehbar sein, um gefährliche Situationen zu müssen die Kommunikationsfähigkeiten des Roboters
vermeiden und dem Menschen den Umgang mit dem besonders ausgeprägt und zusätzlich weitentwickelte
Roboter zu erleichtern. Greif- und Manipulationsfähigkeiten vorhanden sein.
Außerdem ist ein für den Nutzer nachvollziehbares
Verhalten und ein menschliches Erscheinungsbild des
Roboters von großer Bedeutung. Ausgestattet mit die-4. Entwicklungsperspektiven 21
4.6.2 Roboter für Militär, Sicherheit und
Überwachung (3.3)
Für den Schwerpunkt militärische Anwendungen
und dabei speziell Überwachung und Sicherheit ste-
hen in der Servicerobotik Mobilitätsaspekte und die
Weiterentwicklung vorhandener optischer Sensorik
im Vordergrund. Ob als robotische Gefängniswächter
oder zur Grenzüberwachung eingesetzt, Roboter zur
Überwachung und Sicherung von Infrastrukturen,
Grenzen und Gebäuden benötigen Fähigkeiten, die
es ihnen ermöglichen, autonom größere Strecken zu
bewältigen und Areale zu überwachen. Generell hoher
Bedarf besteht in der Weiterentwicklung von Sensorik
zur Umfelderkennung, wie zum Beispiel optische oder
akustische Sensorik, um die Überwachungsfunkti-
on bestmöglich ausüben zu können. Aber auch hier
muss weiter an Verfahren geforscht werden, die die
Kooperation mit anderen Robotern vereinfachen, um
gemeinsam das zu observierende Objekt oder Gelände
zu bearbeiten.
Care-O-bot
4.6.3 Roboter für Inspektion und Wartung (3.4)
sen Fähigkeiten können zur Pflege eingesetzte Roboter Für Roboter, deren Einsatzgebiete im Wesentlichen bei
Materialien transportieren, aber auch Menschen bei der Inspektion und Wartung liegen, gelten ähnliche
Bewegungen und anderen Tätigkeiten assistieren. Da- Herausforderungen wie bei der Assistenzrobotik im
für ist es dringend erforderlich, dass der Roboter auch industriellen Umfeld. Der Fokus liegt allerdings noch
eine angemessene soziale Kompetenz sowie Kommu- mehr auf der Mobilität und Autonomie der Roboter,
nikationsfähigkeit besitzt. um eine robuste und störungssichere Navigation in
unstrukturierten Umgebungen vorzunehmen und in
Einen großen Forschungsschwerpunkt im Heimbe- diesen autark Handlungen durchzuführen. Dazu ist
reich stellt sicherlich die Mensch-Maschine-Schnitt- gleichfalls fortschrittliche Sensorik zur Umfelderken-
stelle dar. Eine dem Stand der Technik entsprechende nung und ein hohes Maß an Lernfähigkeit beziehungs-
Sprachkommunikation muss integriert werden, Wahr- weise Adaption, bestenfalls in Echtzeit, notwendig.
nehmungssensorik muss einwandfrei funktionieren Zur besseren Datenkommunikation mit diesen zum
und die Aktionen des Roboters müssen nachvollzieh- Teil sehr verteilten Systemen besteht ein weiterer
bar gestaltet werden. Auch hier ist das äußere Erschei- Forschungsbedarf auch in verbesserten Kommunikati-
nungsbild für die Nutzerakzeptanz wesentlich. Die onstechniken sowie Rechner- und Softwaretechniken.
aktuelle Forschung beschäftigt sich mit der Frage, ob Da diese Roboter häufig weite Strecken zurücklegen
ein Roboter eher ein maschinelles oder ein menschli- müssen, bestehen auch hohe Anforderungen in Bezug
ches Erscheinungsbild besitzen sollte. Bei Robotern für auf die Energieautarkie.
den Heimbereich spielt Energieautarkie keine große
Rolle, während, ähnlich wie bei der medizinischen Die folgende Tabelle gibt eine vorläufige Einschätzung,
Robotik, Fähigkeiten wie die genaue manuelle Mani- wann die Forschung die aufkommenden Bedarfe vor-
pulation von Objekten und adäquate Bewegungs- und aussichtlich adressieren und eventuell lösen wird.
Navigationsfähigkeiten relevant sind.Sie können auch lesen