KOMOD - KOOPERATIVE MOBILITÄT IM DIGITALEN TESTFELD DÜSSELDORF - USE CASES IM ÜBERBLICK
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

KoMoD – Kooperative
Mobilität im digitalen
Testfeld Düsseldorf
USE CASES IM ÜBERBLICK
WWW.KOMOD-TESTFELD.ORG
STARKE PARTNER Impressum
Herausgeber
Landeshauptstadt Düsseldorf
Amt für Verkehrsmanagement
In KoMoD arbeiten 16 Partner im Aufbau und im Be- Verkehrssystemmanagement, Forschungsprojekte
trieb des Testfeldes zusammen. Neben den beteiligten (66/6.3)
Baulastträgern sind Partner aus den Bereichen Tele- Auf’m Hennekamp 45
kommunikation und Verkehrstechnik, sowie Automobil- 40200 Düsseldorf
hersteller und Systemhersteller von Fahrzeugkompo- Kontakt Projektbüro KoMoD
nenten und Forschungseinrichtungen beteiligt. c/o Heusch/Boesefeldt GmbH
Torben Hilgers
Zieglersteg 12
52078 Aachen
FÖRDERUNG komod.pb@heuboe.de
Das Projekt KoMoD wird mit ca. 9 Mio. Euro durch das Telefon: 0241 9669-0
Bundesministerium für Verkehr und digitale Infrastruk-
tur im Rahmen der Förderrichtlinie „Automatisiertes und
vernetztes Fahren auf digitalen Testfeldern in Deutschland“
gefördert .
PROJEKTLAUFZEIT
Juni 2017 bis Juni 2019
PROJEKTVOLUMEN
14.846.832 €
FÖRDERVOLUMEN
9.039.221 €
WWW.KOMOD-TESTFELD.ORG
2
INHALT Projektpartner..............................................................................................................................................................................................2 Vorwort ..............................................................................................................................................................................................................4 USE CASES Strategiekonformes Routing und Parkhausinformationen...................................................................................6 Virtuelle Verkehrsbeeinflussung zentralenbasiert ........................................................................................................10 Virtuelle Verkehrsbeeinflussung RSU basiert & Staumeldungen über RSU ...........................................14 Tunnelsperrung und Tunnelsteuerung ....................................................................................................................................18 eCall+ Unfall-Alarm und Rettungsgassen-Assistent...................................................................................................22 Kooperative Lichtsignalanlagen ..................................................................................................................................................26 ÖPNV-Priorisierung und C2X-Assistenz an der kooperativen LSA .................................................................30 Zentrale Schaltzeitprognose ...........................................................................................................................................................34 Smart Cycling ...............................................................................................................................................................................................38 Smart Parking – Stellplatzgenaue Zielführung ...............................................................................................................42 Fahrzeugbasierte Verkehrsdatenerfassung ......................................................................................................................46 Digitale Karte ..............................................................................................................................................................................................50 Evaluation ........................................................................................................................................................................................................54 Impressum ......................................................................................................................................................................................................59 3

VORWORT
Im Rahmen der Förderbekanntmachung Ziel des Forschungsvorhabens ist die
„Automatisiertes und vernetztes Fahren auf Bereitstellung eines Testfeldes zur Erpro-
digitalen Testfeldern in Deutschland“ des bung neuer Technologien der Fahrzeug-In-
Bundesministeriums für Verkehr und digitale frastrukturvernetzung sowie des teil- und
Infrastruktur (BMVI) wurde ein Konsortium hochautomatisierten Fahrens unter realen
um die beiden Baulastträger Landesbe- Verkehrsbedingungen.
trieb Straßenbau Nordrhein-Westfalen und
Landeshauptstadt Düsseldorf ausgewählt, Adressiert wurden insbesondere folgende
gemeinsam das Forschungsvorhaben Aufgabenbereiche:
„Kooperative Mobilität im digitalen Testfeld Erprobung der Datenbereitstellung und
Düsseldorf (KoMoD)“ umzusetzen. Kommunikation.
Analyse des Zusammenspiels von Infor-
Das Forschungsvorhaben KoMoD startete mationsbereitstellung durch die Infrastruk-
im Juni 2017 mit einer Laufzeit von 25 Mona- tur und Erfassung durch die bordautonome
ten. Das Gesamtprojektvolumen beträgt Sensorik im Fahrzeug.
14,8 Mio. € bei einem Fördervolumen von Analyse des Zusammenspiels der fahr-
9 Mio. €. zeugseitigen Systeme mit hochpräzisem
Kartenmaterial unter Nutzung geeigneter
Das Testfeld Düsseldorf repräsentiert den Ortungstechnologien.
typischen Ballungsraum mit regionalem Bewertung der umgesetzten Anwendun-
und überregionalem Verkehr auf den gen zur Unterstützung von automatisierten
Autobahnen und gleichzeitig ausgeprägten Fahrfunktionen hinsichtlich der Auswirkun-
Pendlerströmen in den Netzen der beiden gen auf Verkehrseffizienz, Verkehrssicher-
beteiligten Baulastträger. Das Testfeld er- heit sowie auf Umwelteinträge.
streckt sich auf einer Länge von 20 km vom
AK Meerbusch (A57/A44) über die A57 und Das Testfeld Düsseldorf zeichnet sich ins-
weiterführend über das AK Kaarst und die besondere dadurch aus, dass die Initiierung
A52, die planfreie Bundesstraße B7 in städti- des Projektes durch die Infrastrukturbetrei-
scher Baulast, den Rheinalleetunnel und die ber (Stadt Düsseldorf und Land NRW) er-
Rheinkniebrücke bis in den innerstädtischen folgte. Die Infrastrukturbetreiber wollen den
Bereich von Düsseldorf-Friedrichstadt. Das Prozess der zunehmenden Automatisierung
linksrheinische Vodafone Parkhaus ist eben- aktiv mitgestalten und die eigenen Anfor-
falls Teil des Testfeldes. derungen in die Entwicklungen einfließen
4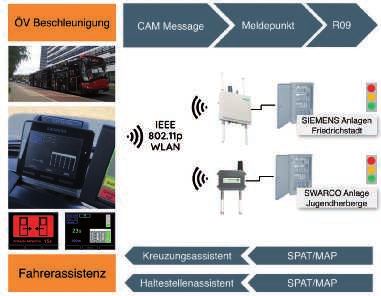
lassen. Auf diese Weise und aufgrund der In- Es gilt nun, diese Entwicklungen in einen
tegration der Applikationen in die bestehen- kontinuierlichen Innovationsprozess zu
den, im Betrieb befindlichen Zentralen und überführen, der nicht nur die fahrzeugseitige
Feldgeräte sind die Voraussetzungen einer Entwicklung berücksichtigt, sondern auch
baldigen Marktreife der entwickelten Appli- technische, organisatorische und betrieb-
kationen und Technologien deutlich höher, liche Rahmenbedingungen auf Seiten der
als bei einer reinen Anwendung in separaten Infrastrukturbetreiber und der Anbieter
Forschungsumgebungen. verkehrstechnischer Infrastruktur schafft.
Die Projektpartner danken dem Bundesmi-
Bei der Umsetzung wurde zudem auf die nisterium für Verkehr und digitale Infrastruk-
Verwendung existierender Standards ge- tur (BMVI) als Fördermittelgeber, dem Pro-
setzt, um die Zugänglichkeit des Testfeldes jektträger VDI/VDE Innovation und Technik
für interessierte Dritte zu gewährleisten. GmbH und der Projektsteuerung Heusch/
Noch während der Projektlaufzeit waren mit Boesefeldt GmbH für die hervorragende Un-
Audi und Daimler zwei prominente Nutzer im terstützung und somit für ihren wertvollen
Testfeld Düsseldorf aktiv. Beitrag zum Projekterfolg.
Im Testbetrieb konnten wertvolle Erfahrun- Ich persönlich möchte mich ganz herzlich
gen darüber gesammelt werden, wie die bei den Projektpartnern für die spannende
bereitgestellten Informationen fahrzeugsei- und stets konstruktive Zusammenarbeit
tig in automatisierten Fahrfunktionen ver- bedanken. Wir haben trotz der relativ kurzen
arbeitet werden können. Durch die zum Teil Projektlaufzeit und der heterogenen Zusam-
redundante Umsetzung einzelner Use Cases mensetzung des Projektkonsortiums schnell
konnten außerdem die beiden unterschiedli- zusammengefunden, tragfähige Lösungen
chen Kommunikations- und Systemansätze erarbeitet und diese in Form von Use Cases
verglichen werden: erfolgreich umgesetzt. Hierfür sage ich:
Dezentraler Ansatz mittels WLAN ITS-G5 „Danke!“
Kommunikation zwischen Fahrzeug und Mit der heutigen Abschlussveranstaltung
Infrastruktur freuen wir uns, Ihnen die umgesetzten Use
Zentraler Ansatz mittels Mobilfunkkommuni- Cases zu präsentieren und erfahrbar zu
kation und Einbindung eines Serviceproviders machen.
Mit KoMoD wurde ein weiterer Schritt in
Richtung des vernetzten und automatisier- Heiko Böhme
ten Fahrens in Ballungsräumen umgesetzt. Projekt-Koordinator KoMoD
Landeshauptstadt Düsseldorf
5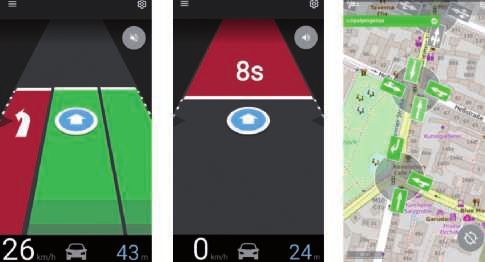
USE CASE 1
Strategiekonformes
Routing und Parkhaus-
informationen
6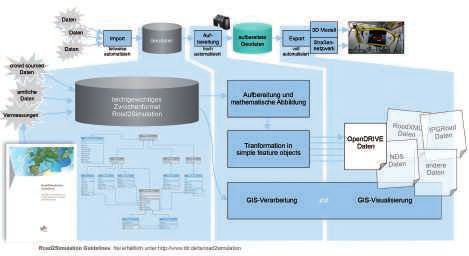
Ein mit dem Testfeld Düsseldorf über Mobilfunk
vernetztes Fahrzeug mit dem Fahrtziel eines
Parkhauses in Düsseldorf-Friedrichstadt nähert
sich auf der A57 aus Norden kommend dem
Autobahnkreuz Meerbusch.
Der Fahrer hat zuvor auf seinem Endgerät im Fahrzeug den Wunsch akti-
viert, im Falle einer (kollektiven) Umleitungsempfehlung des Straßenbetrei-
bers informiert zu werden. Liegt ein detektierter Störfall vor, werden auto-
matisch die Empfehlungen für Alternativrouten über dynamische Anzeigen
(dWiSta, Freitexttafeln) geschaltet sowie im Routing Client zur Auswahl
angeboten. Das Routing wird entlang der gewählten Strecke fortgesetzt.
Am Heerdter Dreieck folgt ein weiterer Entscheidungspunkt. Sollte eine
Alternativroute geschaltet sein, werden dem Fahrer wieder beide Routen
angezeigt und das Routing entlang der gewählten Strecke fortgesetzt.
Im Zielbereich wird der Füllstand des gewählten Parkhauses abgefragt.
Bei Überschreitung des Grenzfüllstandes wird dem Fahrer während der
Anfahrt automatisch ein umliegendes Alternativparkhaus angeboten. Nach
Bestätigung des neuen Ziels, wird das Routing entsprechend angepasst.
Parallel zum obigen Vorgang fragt der Routing-Client im Fahrzeug in
Abhängigkeit der aktuellen Geoposition des Fahrzeugs sowie der Fahrt-
richtung per Webservice beim Provider (hier die HAV-Schicht) nach, ob
und welche verkehrsbeeinflussenden Schilder, wie z.B. dWiSta oder Park-
leitinformationen, relevant sind. Die aktuellen Inhalte dieser Schilder wer-
den dann als Bild auf der Applikation im Fahrzeug bzw. Smartphone zur
Anzeige gebracht.
7
57 44
44 57
52 52
8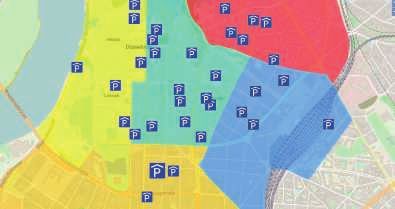
Technik
Bereitstellung der strategischen Routen und Schaltbilder aus
Strategiemanagementsystemen von Stadt und Land am MDM (DATEX II – Format)
Abfrage der Routen und Schaltbilder durch Provider (DATEX II – Format)
Abfrage der Routen und Schaltbilder durch Fahrzeuge über
Mobilfunk beim Provider (DATEX II – Format)
Fahrzeugseitige Informationsverarbeitung im Routing Client
Nutzen
Eine Abstimmung zwischen fahrzeugseitiger Navigation und
kollektiver Routenempfehlung erhöht deren Befolgungsgrad
Dem Fahrer wird eine leistungsfähige Alternativroute angeboten
Im Störfall können die Baulastträger Einfluss auf die Routenwahl nehmen
und Verkehrsströme gezielt umlenken
Beitrag zum vernetzten und
automatisierten Fahren
Vorausschauende Planung der Fahrmanöver in Verbindung mit einer
hochgenauen digitalen Karte und fahrzeugseitiger Sensorik
Automatisierung der Fahrmanöver inklusive neuer Routenwahl
Reduzierung des Parksuchverkehrs durch frühzeitige Informationen
9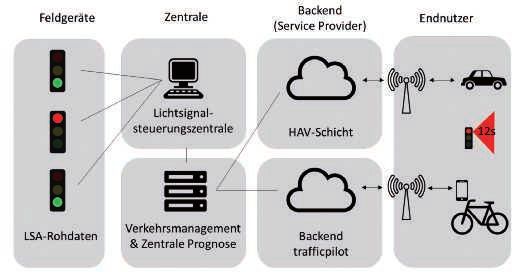
USE CASE 2
Virtuelle Verkehrsbeein-
flussung zentralenbasiert
10Ein Fahrzeug fährt auf der A57 vom Kreuz Meerbusch
in Richtung Süden. Abhängig von seiner Position ruft
es die Anzeigen der Streckenbeeinflussung auf der
A57 wie zulässige Höchstgeschwindigkeiten oder
Überholverbote über eine Mobilfunkverbindung ab.
Bei einer definierten Annährung wird über ein fahrzeugseitiges Display das Schalt-
bild auf der vorausliegenden Schilderbrücke angezeigt. Sobald der Anzeigestandort
passiert wurde, wird das aktuelle Schaltbild „eingefroren“ und damit dem Fahrer bis
zum Erreichen der folgenden Schilderbrücke weiterhin als verkehrsrechtlich bindend
angezeigt.
Gleichzeitig wird das Schaltbild der nächstfolgenden Schilderbrücke im fahrzeugseiti-
gen Display hinzugefügt. Die Schildinhalte weiter entfernt liegender Anzeigestandorte
sind für den Fahrer nicht von Bedeutung und werden ihm daher nicht präsentiert.
Einem automatisiert fahrenden Fahrzeug stehen auch die Schaltbilder der nach-
folgenden Anzeigequerschnitte zur Verfügung. Auf Basis dieser vorausschauenden
Informationen kann im Fahrzeug eine Fahrstrategie gewählt werden, die eine Durch-
fahrt durch den gesamten Streckenabschnitt komfortabel und ressourcenschonend
mit möglichst wenigen Brems- und Beschleunigungsvorgängen ermöglicht.
1112
Technik
Bereitstellung der Schaltbilder der Anzeigequerschnitte der Verkehrsbeeinflussungsanlagen
von der Verkehrszentrale des Landes Nordrhein-Westfalen über den MDM (DATEX II - Format)
Abfrage der Schaltbilder durch Provider (DATEX II – Format)
Abfrage der Schaltbilder durch Fahrzeuge über Mobilfunk bei der HAV-Schicht
(DATEX II - Format)
Fahrzeugseitige Informationsverarbeitung und Darstellung
Nutzen
Zweifelsfreie Kenntnis der dynamischen Verkehrsschilder
(Vorschrift- und Gefahrzeichen) durch Redundanz bei Erkennung mittels Fahrzeugsensorik
Verringerung von Brems- und Beschleunigungsvorgängen durch Vorausschau
Erhöhung der Verkehrssicherheit bei Zufahrt auf Stau- und Gefahrensituationen
Beitrag zum vernetzten und
automatisierten Fahren
Umgehende digitale Bereitstellung der Anzeigen (Geschwindigkeit, Überholverbot, etc.)
als Voraussetzung für die Automatisierung von Fahrfunktionen
Vorausschauende Planung der Fahrmanöver und Fahrstrategien auf Basis der aktuellen
Informationen für den Streckenabschnitt
Wahl von Fahrstrategien insbesondere im Vorfeld und im Bereich von Gefahrensituationen
(z.B. Stauende, Unfall)
Verringerung der Anzahl und Intensität von Brems- und Beschleunigungsvorgängen.
Initiierung von frühzeitigen Fahrstreifenwechseln im Falle von
Fahrstreifensperrungen
13USE CASE 3
Virtuelle Verkehrs-
beeinflussung RSU
basiert & Staumeldungen
über RSU
14Ein Fahrzeug des Testfeldes bewegt sich von der A52
kommend auf die B7 Richtung stadteinwärts. Ab der
Anschlussstelle Büderich ist das Fahrzeug im Kommu-
nikationsbereich einer Road Side Unit (RSU) des Test-
feldes.
Broadcast virtuelle VBA
Das Fahrzeug erhält bei Einfahrt in den Wirkbereich der RSU die für den Streckenab-
schnitt geltende Geschwindigkeitsbegrenzung als sogenannte In-Vehicle-Information
(IVI). Diese von der RSU versendete IVI wird durch die Onboard-Unit (OBU) im Fahrzeug
interpretiert und visualisiert.
Ermittlung einer Verkehrslage mit RSU und Broadcast einer Stauwarnung
Die Fahrzeuge liefern der RSU ihrerseits die eigene Position, Fahrtrichtung und Ge-
schwindigkeit als sog. Cooperative Awareness Message (CAM). Eine auf der RSU akti-
ve Anwendung ermittelt auf Basis der eingehenden CAM Nachrichten der Fahrzeuge
eine Verkehrslage. Wenn ein definierter Schwellenwert erreicht wird, generiert die
RSU eine lokale Staumeldung als Decentralised Environmental Notification Messages
(DENM) und gibt diese als Broadcast zurück. Die von der RSU versendete DENM wird
durch die OBU im Fahrzeug interpretiert und visualisiert.
1516
Technik
Übertragung von fahrzeugseitig generierten Meldungen (CAM) an die RSU
via ITS-G5
RSU überträgt Geschwindigkeitsinformationen an die Fahrzeuge mittels ITS-G5
(IVI - Format)
RSU errechnet eine lokale Verkehrslage und generiert bei Erkennen einer
Stausituation eine Stauwarnung als DENM-Nachricht
RSU überträgt Stauwarnung an die Fahrzeuge mittels ITS-G5 (DENM - Format)
Fahrzeugseitige Interpretation und Verarbeitung der ITS-G5 Meldungen
Nutzen
Erhöhung der Verkehrssicherheit bei Zufahrt auf Stau- und Gefahrensituationen
Beitrag zum vernetzten
und automatisierten Fahren
Vorausschauende Planung der Fahrmanöver und Fahrstrategien auf Basis
der aktuellen Informationen für den Streckenabschnitt
Wahl von Fahrstrategien insbesondere im Vorfeld und im Bereich von
Gefahrensituationen (z.B. Stauende, Unfall)
17USE CASE 4
Tunnelsperrung und
Tunnelsteuerung
18Ein mit entsprechender Kommunikationstechnik ausgestatte-
tes Fahrzeug fährt auf der B7 stadteinwärts in Richtung Rhei-
nalleetunnel. Im Annäherungsbereich des Tunnels erhält der
Fahrer über ein fahrzeugseitiges Display Informationen über
ggf. vorherrschende verkehrliche Besonderheiten im Tunnel
(z.B. liegengebliebenes Fahrzeug, Personen auf der Fahrbahn)
sowie die aktuell geschaltete Tunnelschaltung (z.B. Tunnel-
sperrung, zulässige Höchstgeschwindigkeit).
Die Informationen zwischen Tunnel und Fahrzeug werden hierbei sowohl über Mobilfunk (4G/5G)
als auch über den WLAN Standard IEEE 802.11p / ITS-G5 übertragen. Das Fahrzeug nutzt diesel-
ben Übertragungswege um seinerseits fahrzeugseitig generierte Status- (CAM) und Warnmel-
dungen (DENM) zu übermitteln. Die übermittelten Warnmeldungen können dabei Informationen
über das Fahrzeug selbst (Ego-Informationen: z.B. Bin liegen geblieben, Tank leer) oder vom
Fahrzeug beobachtete Informationen (Observer-Informationen: z.B. Personen auf der Fahrbahn)
enthalten. Alle Status- und Warnmeldungen für den Tunnelbereich werden an den Datenkonzen-
trator übergeben und dort mit infrastrukturseitig (Messsensor: Intelligente Induktionsschleife)
erhobenen Verkehrsdaten (z. B. liegengebliebenes Fahrzeug) fusioniert. Das infrastrukturseitige
Erfassungssystem Intelligente Induktionsschleife erfasst dabei alle Fahrzeuge. Eine besondere
Ausstattung der zu erfassenden Fahrzeuge ist nicht nötig. Der Datenkonzentrator stellt diese
fusionierten Verkehrsinformationen der Tunnelzentrale mittels TLSoIP zur Verfügung. Basierend
auf diesen detaillierten Verkehrsinformationen können dann in der Tunnelzentrale bei Bedarf
entsprechende Tunnelschaltungen geschaltet werden und/oder entsprechenden Informationen
über aktuell vorherrschende verkehrliche Besonderheiten an die entsprechenden Fahrzeuge im
Tunnelbereich übermittelt werden.
Stadteinwärts
Im Falle einer Sperrung des Rheinalleetunnels wird eine Umleitungsempfehlung am Heerdter
Dreieck über die Theodor-Heuss-Brücke geschaltet. Der Fahrer erhält im Annäherungsbereich
zum Heerdter Dreieck bereits die Information, dass der Rheinalleetunnel gesperrt ist. Zusätzlich
werden das Schaltbild, welches auf den straßenseitigen Wechselzeichengeber (WZG) angezeigt
wird, sowie Informationen über die aktuelle Fahrstreifenzuordnung auf dem fahrzeugseitigen
Display angezeigt.
Stadtauswärts
Mit der Sperrung des Rheinalleetunnels wird gleichzeitig die Ausleitung des stadtauswärtigen
Verkehrs nach Oberkassel initiiert. Die Anzeigen des dortigen WZG werden in das Fahrzeug
übertragen und die empfohlene Fahrstreifenzuweisung sowie die Ausleitung auf dem fahr-
zeugseitigen Display angezeigt.
1920
Technik
Übertragung von fahrzeugseitig generierten Statusmeldungen (CAM) und Warnmeldungen
(DENM) an den Datenkonzentrator (via Mobilfunk: 4G/5G ; via WLAN Standard:
IEEE 802.11p/ ITS-G5)
Übertragung von infrastrukturseitig generierten Verkehrsdaten an den Datenkonzentrator
(proprietäres Format)
Übertragung von detaillierten Verkehrsinformationen vom Datenkonzentrator an die
Tunnelzentrale (TLSoIP - Format)
Bereitstellung aktueller Schaltbilder der für den Rheinalleetunnelrelevanten WZG durch
die Verkehrssystemmanagement-Zentrale Düsseldorf. Die entsprechenden Daten werden auf
dem Mobilitätsdatenmarktplatz (MDM) bereitgestellt (DATEX II - Format)
Abfrage der Schaltbilder auf dem MDM durch den Provider HAV-Schicht (DATEX II - Format)
Abruf der Schaltbilder von der HAV-Schicht durch die Fahrzeuge mittels Mobilfunk
(DATEX II - Format)
Bereitstellung der Schaltbilder an den Tunnelportalen über Road-Side-Units (RSU) und WLAN
Standard (IVI - Format)
Nutzen
Generierung und Bereitstellung von hochwertigen und detaillierten Verkehrsinformationen
für den Tunnelbereich
Optimierung der Verkehrslageerfassung im Tunnel (fahrzeug- und infrastrukturseitig)
Signifikante Steigerung der Verkehrssicherheit im Annäherungsbereich auf den Tunnel
z.B. durch frühzeitige Informationen über Tunnelsperrungen und Umleitungsempfehlungen
Signifikante Steigerung der Verkehrssicherheit im Tunnel z.B. durch frühzeitige Warnung vor
vorausliegenden Stau- und/oder Gefahrensituationen im Tunnel
Frühzeitiges Anpassen des Fahrverhaltens. Hierdurch ist eine Verringerung von unnötigen
Brems- und Beschleunigungsvorgängen möglich
Beitrag zum vernetzten und
automatisierten Fahren
Bereitstellung von infrastruktur- und fahrzeugseitig erfassten Verkehrsinformationen, die für
das automatisierte Durchfahren der sicherheitskritischen Infrastruktur Tunnel wichtig sind. Hier-
bei handelt es sich speziell um sicherheitsrelevante Informationen, welche vom gerade in den
Tunnel einfahrenden Fahrzeug mittels eigener Bordsensorik nicht bzw. noch nicht erfasst werden
können. Derartige Informationen können z.B. liegen gebliebene (brennende) Fahrzeuge, Perso-
nen auf der Fahrbahn oder Geisterfahrer sein
Bereitstellung von Informationen zur frühzeitigen Reaktion des automatisiert fahrenden Fahr-
zeugs auf vorausliegende Gefahrensituationen im Tunnel. Einleiten von geeigneten Maßnahmen
von z.B. einem Fahrstreifenwechsel bei eingeschränkter Befahrbarkeit des Tunnels, über das au-
tomatisierte Anhalten des Fahrzeugs vor dem Tunnel bis hin zur Übergabe der automatisierten
Fahrfunktion an den Fahrer
Bereitstellung von potentiellen Umfahrungsmöglichkeiten im Falle einer Tunnelsperrung
21USE CASE 5
eCall+
Unfall-Alarm und
Rettungsgassen-Assistent
22Ein mit dem Unfall-Alarm (eCall+) ausgestattetes Fahrzeug
fährt im Testfeld KoMoD und hat einen Störfall mit Stillstand
(„Crash“). Das Fahrzeug sendet per C2X-Technologie (Mo-
bilfunk) einen Unfall-voraus-Alarm an umliegende Fahrzeu-
ge zur Einleitung entsprechender Fahrstrategien.
Ebenso wird der Alarm an die Verkehrssystemmanagement-Zentrale der Stadt Düsseldorf zur
Generierung einer kollektiven Verkehrsmeldung und gegebenenfalls Einleitung von Verkehrs-
managementstrategien gesendet. Gleichzeitig geht der Alarm bei der KoMoD-Notrufzentrale
von Vodafone (PSAP – Public Safety Answering Point) ein. Ein Rettungswagen informiert per
Mobilfunk automatisch die Fahrzeuge, die auf der Strecke zwischen Rettungswagen und Unfall-
ort fahren, über die Einsatzfahrt und fordert die Bildung einer Rettungsgasse an. Das Einsatz-
fahrzeug erhält freie Fahrt, um störungsfrei zum Unfallort zu gelangen.
2324
Technik
Übertragung von fahrzeugseitig generierten Warnmeldungen (eCall+) an den
C2X-Server via Mobilfunk
Weiterleitung der Meldungen an die Verkehrssystemmanagement-Zentrale der
Stadt Düsseldorf via MDM (DATEX II - Format)
Warnung der Fahrzeuge im Umfeld des Unfalls über C2X-Server via Mobilfunk
Übertragung von fahrzeugseitig generierten Warnmeldungen (Rettungsgassenruf)
an den C2X-Server via Mobilfunk
Anforderung Rettungsgasse im Umfeld des Unfalls über C2X-Server via Mobilfunk
Nutzen
Vermeidung von (Folge-) Unfällen und Massenkarambolagen, weil Verkehrsteilnehmer
vorrausschauend vor Gefahren gewarnt werden
Schnellere Einleitung von Rettungsmaßnahmen durch Einsatzzentralen
Reduzierung der Anfahrtszeit für Rettungsfahrzeuge
Reduzierung der Verlustzeiten durch frühzeitige Verkehrslenkungsmaßnahmen
Beitrag zum vernetzten und
automatisierten Fahren
Aussenden und Empfangen von Gefahrenmeldungen und Sicherheitshinweisen, um
das eigene Fahrverhalten anzupassen und (Folge-) Unfälle zu vermeiden
25USE CASE 6
Kooperative
Lichtsignalanlagen
26Ein mit einer Onboard-Unit ausgestattetes Fahrzeug
nähert sich einer mit einer Road-Side-Unit (RSU) aus-
gerüsteten Lichtsignalanlage (LSA). Während der Zufahrt
auf die LSA erhält das Fahrzeug mittels ITS-G5 Nachrichten
zur Kreuzungstopologie (MAP) sowie Zustands- und Prog-
noseinformationen (SPAT).
Die bereitgestellten Daten zur Kreuzungstopologie beinhalten Informationen zur Anzahl der
Fahrstreifen, Positionen der Haltlinien, zulässige Fahrbeziehungen, etc. Mit Hilfe der Kreu-
zungstopologie kann sich das Fahrzeug in Relation zu den festen Positionen von Fahrstrei-
fen, Haltlinien und Signalgebern verorten. Zudem kann das Fahrzeug die für seine Zufahrt
relevanten Signalgruppen identifizieren.
Die Zustands- und Prognoseinformationen beinhalten den aktuellen Zustand aller Signale
der Kreuzung sowie eine Prognose der Restgrün- und -rotzeit. Die Ermittlung der Schaltzeit-
prognose erfolgt entweder lokal im Steuergerät der LSA oder zentral in der Verkehrssystem-
management-Zentrale. Die Nachrichten werden sekündlich aktualisiert und vom Fahrzeug
empfangen.
Die für den Fahrer relevanten Informationen werden im Fahrzeug zur Anzeige gebracht. Mit
Hilfe dieser Informationen kann der Fahrer seine Geschwindigkeit entsprechend anpassen,
um unnötige Brems- und Beschleunigungsvorgänge zu vermeiden. Im Falle eines unvermeid-
baren Haltes wird dem Fahrer die für ihn relevante Restrotzeit angezeigt. Sämtliche Daten
sind Grundlage für einen Kreuzungsassistenten im Fahrzeug, um eine verbrauchsoptimierte
Fahrstrategie umzusetzen.
Bei der ITS-G5 Kommunikation zwischen Fahrzeug und RSU übermittelt die RSU die relevan-
ten Daten, sobald sich das Fahrzeug in deren Empfangsbereich befindet.
27Technik
SPAT / MAP
Signalzustand und MAP: Echtzeit Signalphaseninformation wird dem LSA Steuergerät lokal
entnommen und gemeinsam mit der auf der RSU liegenden Kreuzungstopologie an alle PKW
und ÖV Fahrzeuge ausgesendet (sekündlicher Broadcast)
Prognose von Restrotzeit und Restgrünzeit: lokal am LSA Steuergerät wird eine Prognose der
Restrotzeit und Restgrünzeit errechnet und an alle PKW und ÖV-Fahrzeuge ausgesendet
(sekündlicher Broadcast)
Kreuzungstopologie kommt aus der Verkehrsplanung der Stadt Düsseldorf
Fahrzeugseitige Umsetzung
PKWs setzen in der eigenen Fahrzeugeinheit Kreuzungsassistents-Funktionalität um
ÖV Fahrzeuge setzen auf C2X OBU Betriebs- und Fahrerassistenzanwendungen um
Nutzen
Vermeidung von Halte- sowie Brems- und Beschleunigungsvorgängen
Reduktion von Fahrzeugemissionen
Erhöhung der Verkehrssicherheit
Reduzierung des Unfallrisikos
Beitrag zum vernetzten und automatisierten Fahren
Umsetzung von Prognoseinformationen in Fahrstrategie (automatisierte Zufahrt/Durchfahrt)
2829
USE CASE 7
ÖPNV-Priorisierung
und C2X-Assistenz an der
kooperativen LSA
30Anwendungsfälle mit C2X Onboard-Units
Ein mit einer C2X OBU ausgestatteter Rheinbahn-Linienbus (in Summe sind 16 Busse ausgestat-
tet) nähert sich einer LSA. Sobald der Bus in Reichweite der an der Kreuzung befindlichen RSU ist,
kommunizieren die OBU und RSU miteinander mittels ITS-G5.
Use Case 1 – ÖPNV Priorisierung
In der RSU werden Detektionszonen definiert, die Meldepunkte für die ÖPNV Bevorrechtigung an
LSA darstellen. Bei Überfahren eines Meldepunktes (Voranmelder, Hauptanmelder, Abmelder)
erfolgt fahrzeugseitig (C2X OBU) die Aussendung einer Nachricht mit Informationen zur aktuel-
len Position, Fahrtrichtung, Geschwindigkeit sowie die Kennung von Linie und Kurs. Nach Entge-
gennahme dieser Nachricht durch die RSU erfolgt eine Vorrangschaltung für das ÖV-Fahrzeug
mittels Signalwechsel oder Grünzeitverlängerung im LSA Steuergerät.
Use Case 2 – ÖPNV Fahrerassistenzfunktionen an der kooperativen LSA
Ein sich im Wirkbereich der RSU befindendes ÖV-Fahrzeug mit C2X OBU erhält bei Zufahrt auf
den Knoten sekündlich Signalzustand (SPAT) und Kreuzungstopologie (MAP) des vor ihm liegen-
den Knotens, sowie Prognosedaten zur Restrotzeit und Restgrünzeit dieser LSA (SPAT). Auf Basis
dieser Meldungen werden auf der C2X OBU Assistenzfunktionen umgesetzt und für den Fahrer
visualisiert.
Kreuzungsassistent
Der Kreuzungsassistent unterstützt den Fahrer mit einer auf der OBU visualisierten Geschwindig-
keitsempfehlung im Zulauf auf die LSA, welche auf Basis der Prognosedaten zu Restrotzeit und
Restgrünzeit ermittelt wird.
Kreuzungsassistent im Expertenmodus zu Analyse- und Vorführungszwecken
Für Analyse und Vorführzwecke ist ein Kreuzungsassistent umgesetzt, welcher detailliertere
Informationen auf der C2X OBU visualisiert: Entfernung zum Knoten, Countdown Restrotzeit und
Restgrünzeit der LSA, Kreuzungstopologie mit Hervorheben des Linienverlaufs am Knoten und
LSA-Zustand.
Haltestellenassistent
Der Haltestellenassistent unterstützt den Fahrer mit einem auf der C2X OBU visualisierten Tür-
schluss-Countdown in der Haltestelle. Auf Basis der ermittelten Prognosedaten zur Restrotzeit und
Restgrünzeit wird der Fahrer informiert, wie lange er in der Haltestelle verbleiben kann (späteste
Abfahrt in Sekunden, früheste Abfahrt in Sekunden).
Anwendungsfall ÖV Priorisierung über Mobilfunk
Alternativ zur ÖV-Priorisierung mittels ITS-G5 wird eine zentrale ÖV-Priorisierung über Mobilfunk
realisiert. Hierfür ist der Rheinbahnbus mit einer weiteren OBU ausgestattet. Diese ermittelt mit
Hilfe von Satellitenortung die Position des Busses und vergleicht diese mit Meldepunkten, welche
im Verkehrsrechnersystem konfiguriert und auf der OBU hinterlegt werden.
Überfährt der Bus einen Meldepunkt, wird der Priorisierungsprozess angestoßen. In der Regel sind
es drei Meldepunkte, welche bei Zufahrt auf die Kreuzung von einem Bus passiert werden.
3132
Technik
Kooperativ dezentral
C2X OBU im Bus versendet zur Anforderung der Priorisierung eine Nachricht mit Informationen
zur aktuellen Position, Fahrtrichtung, Geschwindigkeit sowie Kennung mit Linie und Kurs an die
RSU der LSA mittels ITS-G5
Umsetzung der ÖV-Priorisierung in der LSA
Die RSU an der LSA überträgt Kreuzungstopologie-Informationen (MAP) sowie Zustands- und
Prognoseinformationen (SPAT) an die Busse mittels ITS-G5
Visualisierung von Fahrerassistenzfunktionen auf der C2X OBU
Zentral
OBU im Bus versendet zur Anforderung der Priorisierung eine Nachricht an einen Zentralen-
server über Mobilfunk
Kombinierter Betrieb von GPS – GLONASS
Beschleunigungssensorik für die Positionierungsalgorithmik
Flexible Anpassung und Versorgung von Meldepunkten über Zentrale
Zentrale überträgt Priorisierungswunsch an die LSA
Umsetzung der ÖV-Priorisierung in der LSA
Nutzen
Verbesserung des (Linien-)Betriebes des ÖV durch Umsetzung neuer Assistenz-Anwendungen
im ÖV-Fahrzeug
Erhöhung der Attraktivität des ÖV
Erneuerung und Erweiterung der ÖV-Priorisierung
Beitrag zum vernetzten und
automatisierten Fahren
Digitalisierung der ÖV-Priorisierung (lokal und zentral)
Standardisierung und Erneuerung der ÖV-Priorisierung
Nutzung von Potentialen von erweiterten und integrierten Anwendungsfällen für den ÖV am Knoten
Integration des ÖV in ein kooperatives Ökosystem mit Hilfe von C2X-Technologie
33USE CASE 8
Zentrale
Schaltzeitprognose
34Ein mit einer Onboard-Unit ausgestattetes Fahrzeug bzw.
ein mit einem mobilen Endgerät ausgestattetes Fahrrad
nähert sich einer Lichtsignalanlage (LSA). Während der
Zufahrt auf die LSA erhält der Fahrer die Informationen,
mit welcher Geschwindigkeit er die nächste LSA ohne Halt
passieren kann. Im Falle eines unvermeidbaren Haltes wird
dem Fahrer die für ihn relevante Restrotzeit angezeigt.
Die Schaltzeitprognosen dafür werden für alle an die Lichtsignalsteuerungszentrale ange-
schlossenen LSA zentral erstellt, basierend auf den über die Zentrale erhaltenen LSA-Rohdaten.
Die Prognosen werden auch zentral verbreitet, dazu werden sie zunächst an ein Backend eines
Service Providers übermittelt. Von dort werden sie über das Mobilfunknetz an die Verkehrsteil-
nehmer (Endnutzer) weitergeleitet, wobei anhand deren Position die relevanten Prognosen
ausgewählt werden.
Bild 1: Kommunikationskette zentrale Schaltzeitprognose
35Technik
Prognoseerstellung für die Schaltzeiten nahezu aller LSA des Stadtgebiets Düsseldorf
in der VSM-Zentrale
Keine Erweiterung der Feldgeräte notwendig
Keine Ausstattung der LSA mit RSU erforderlich
Bereitstellung der LSA-Prognosen für den Use-Case Smart Cycling
Bereitstellung der LSA-Prognosedaten über den Service Provider HAV-Schicht an die
Versuchsträgerfahrzeuge für die Verwendung in verschiedenen Use-Cases
Nutzen
Vermeidung von Halte- sowie Brems- und Beschleunigungsvorgängen
Reduktion von Fahrzeugemissionen
Erhöhung der Verkehrssicherheit
Reduzierung des Unfallrisikos
Beitrag zum vernetzten und automatisierten Fahren
Umsetzung von Prognoseinformationen in Fahrstrategien (automatisierte Zufahrt/Durchfahrt)
Beispiel: Referenzimplementierung für ein amerikanisches Testfeld
Web-App GEVAS/TTS
3637
USE CASE 9
Smart Cycling
38Zeigt die nächste Ampel in ein paar Sekunden Grün? Durch-
fahren oder Bremsen? Lieber etwas langsamer fahren, um
in der Grünen Welle zu bleiben? Oder ausrollen lassen, weil
es bis zum Grün noch dauert? Und wann genau wird es wie-
der Grün?
Gerade beim Radfahren in der Stadt stellt man sich diese Fragen, weil ständiges Bremsen und
wieder Anfahren vor den Ampeln besonders unangenehm ist und den Spaß am Radfahren
reduziert. Die Smart Cycling Applikation nutzt die in KoMoD entwickelten C2I-Technologien, um
einen Ampel-Phasen-Assistenten für die Radfahrer in Düsseldorf zu realisieren.
Die Smartphone-App signalisiert dem Fahrer visuell und akustisch, mit welcher Geschwin-
digkeit er die nächste LSA ohne Halt passieren kann. Mit Einhaltung der Geschwindigkeits-
empfehlung kann der Radfahrer seine Halte- sowie Brems- und Beschleunigungsvorgänge
reduzieren. Muss er vor der Ampel halten, so wird ihm die verbleibende Wartezeit bis zum
nächsten Grün angezeigt.
„Erleben Sie Smart Cycling in Düsseldorf! Holen Sie sich die traf-
ficpilot App auf Ihr Smartphone!“
39Technik
Smartphone zur Positionsbestimmung und Anzeige/Ansage der Rot-Grün-Prognose
Mobilfunk zum Prognose-Abruf vom Server
Digitale Karten (serverseitig) mit Rad-Infos
Funktionen zur automatischen Kartenanalyse und zur Bestimmung der in Fahrtrichtung
voraus liegenden LSA (serverseitig)
Abruf von LSA-Daten über den Verkehrsrechner
Automatische LSA-Daten-Analyse zur Prognose-Erstellung und -Optimierung in der
Zentrale
Nutzen
Verhinderung unnötiger Stopps
Vermeidung von starken Brems- oder Beschleunigungsmanövern
Verringerung des Kraftaufwands beim Radfahren (bzw. von Kraftstoffverbrauch und
Emissionen beim Auto)
Entspanntes und gleichmäßigeres Fahren durch die Stadt
Radfahren wird weniger anstrengend und folglich komfortabler, so dass in Zukunft
häufiger vom Pkw auf das Fahrrad umgestiegen wird
Beitrag zum vernetzten und automatisierten Fahren
Unterstützung beim Fahren durch Anzeige bzw. Ansage der passenden Geschwindigkeit
für die Grüne Welle und weiterer Informationen
4041
USE CASE 10
Smart Parking
Stellplatzgenaue
Zielführung
42Beim automatisierten Valet Parken steuert der Fahrer mit
dem Testfahrzeug zunächst eine Übergabezone (Drop-off
Zone) im Bereich der Parkhauseinfahrt an. Anmeldung an
einen Server und Abgabe des Fahrzeugs geschehen dann
über das Smartphone.
Der Server weist dem Fahrzeug anschließend eine freie Parklücke zu und übermittelt
entsprechende Wegpunkte von der Übergabezone zum zugewiesenen Parkplatz an das
Fahrzeug über Mobilfunk (4G und 5G). An den Parklücken angebrachte Ultraschallsensoren
detektieren kontinuierlich den Belegungsstatus der Parklücken und senden diesen über eine
Narrowband IoT Mobilfunkverbindung zum Server.
Nach Zuweisung einer Parklücke fährt das Fahrzeug diese vollautomatisiert an und parkt
dort selbstständig ein. Wird das Fahrzeug vom Fahrer über das Smartphone wieder ange-
fordert, erhält es vom Server eine Route zurück zur Übergabezone und folgt dieser vollauto-
matisiert. Am Übergabepunkt übernimmt der Fahrer dann das Fahrzeug wieder und setzt die
Fahrt ohne Automatisierung fort.
Für die automatisierte Fahrzeugführung, muss das Fahrzeug zunächst seine Position im
Parkhaus bestimmen. Hierfür nutzt es fahrzeugseitig verbaute Sensoren (wie zum Beispiel
Lidar und Kamera) und vergleicht das von den Sensoren erfasste Bild mit vorab bekannten
Informationen aus einer hochgenauen Karte. Entlang der übermittelten Wegpunkte plant
das Fahrzeug kontinuierlich einen Pfad, um auch statischen Hindernissen ausweichen zu kön-
nen. Auf Basis des geplanten Pfades wird dann eine passende Trajektorie generiert, welche
sowohl andere Verkehrsteilnehmer wie Fußgänger als auch entsprechende Restriktionen von
Fahrzeugseite (wie zum Beispiel maximale Lenkraten) berücksichtigt. Über entsprechende
Aktoren wird die geplante Fahrzeugbewegung dann vom Testfahrzeug umgesetzt.
43Technik
Vernetzung des Vodafone-Parkhauses im Maschinennetz von Vodafone (Narrowband IoT)
Smarte NB-IoT Parksensoren auf den Stellflächen zur Erkennung freier/belegter Parkplätze
Server mit Schnittstelle zu den Fahrzeugen und Informationsaustausch per Mobilfunk
(4G und 5G)
Hochgenaue digitale Karte des Parkhauses
Vollautomatisierung des RWTH-Versuchsfahrzeugs
Lokalisierung des Fahrzeugs im Parkhaus
Umgebungserfassung zur Interaktion mit anderen Fahrzeugen und Fußgängern
Nutzen
Maximale Parkplatzausnutzung in Städten und Parkhäusern
Zeitersparnis und Komfortgewinn für Autofahrer
Vermeidung von Unfällen in Parkhäusern
Beitrag zum vernetzten und automatisierten Fahren
Bereitstellung von Echtzeit-Informationen zur Belegung von
Verfügbarkeit von Stellplätzen im Parkhaus
Umsetzung von automatisierten Parkservices und fahrerloser
Indoor-Navigation in Parkhäuser
4445
USE CASE 11
Fahrzeugbasierte
Verkehrsdatenerfassung
46Eine heterogene Fahrzeugflotte (ca. 90 Fahrzeuge) wur-
de mit einer Aftermarket-Lösung zur fahrzeug- und
kamerabasierten Verkehrserfassung ausgerüstet. Die
Fahrzeuge agieren als mobile Sensoren im Verkehr und
stellen die georeferenzierten Informationen wie z.B.
Hindernisse auf der Fahrbahn/ Liegengebliebene Fahr-
zeuge, Fußgänger, Geisterfahrer (auf Autobahnen und
autobahnähnlichen Abschnitten) den Projektpartnern zur
weiteren Verwendung zur Verfügung.
Über Mobilfunk werden die detektierten Ereignisse an eine Cloud zur weiteren Verarbei-
tung/Aggregierung gesendet. Relevante Meldungen im Bereich des Rheinalleetunnels
werden über eine Internetanbindung via Server an den Datenkonzentrator des Tunnels zur
direkten Tunnelsteuerung übertragen.
Im Bereich der weiteren autobahnähnlichen Abschnitte erfolgt die Weiterleitung via Server
und MDM an die Verkehrssystemmanagement-Zentrale der Stadt Düsseldorf zur Generie-
rung kollektiver Verkehrsmeldungen und gegebenenfalls zur Einleitung von Verkehrsma-
nagementstrategien.
Die Aftermarket-Lösung unterstützt den Fahrer in Form eines „dritten Auges“, kontinuierlich
das Geschehen vor dem Fahrzeug im Blick zu behalten. Das System identifiziert bestimm-
te potentielle Gefahrensituationen und warnt den Fahrer durch akustische und optische
Signale, um eine Kollision zu verhindern oder die Unfallschwere zu reduzieren.
47Technik
Erfassung des Umfelds mittels bordeigener Sensorik (Kamera)
Übertragung der Daten via Mobilfunk an eine Cloud
Weiterleitung der Meldungen an den Datenkonzentrator des Rheinalleetunnels
via Server
Weiterleitung der Meldungen an die Verkehrssystemmanagement-Zentrale der Stadt
Düsseldorf via Server und MDM (DATEX II - Format)
Nutzen
Schnelle Lokalisierung und Kommunikation von Gefahrenstellen
Optimierung der Meldekette bei Gefahrenwarnungen
Frühzeitiges Schalten von Verkehrsmanagementstrategien (Tunnelsperrung,
Umleitungsempfehlungen)
Gefahrenwarnung und Unfallprävention für den Fahrer
Beitrag zum vernetzten und automatisierten Fahren
Identifizierung und Georeferenzierung kritischer Verkehrssituationen mit Hilfe
des Kamerasystems
Frühzeitige Kommunikation von Gefahrenwarnungen
Reduzierung von Unfallrisiken sowie eine Erhöhung der Verkehrssicherheit
Mischverkehrsszenarien: nicht ausgestattete Fahrzeuge erhalten über die
Informationskanäle der Landeshauptstadt Düsseldorf die detektierten Informationen
4849
USE CASE 12
Digitale Karte
50Eine der Hauptanforderungen bei der Automatisierung
von Systemen besteht darin, dass die Regelungstechnik
der beteiligten Objekte (hier: Fahrzeuge im Verkehrs-
system) Kenntnisse über alle relevanten statischen und
dynamischen Objekte im aktuellen Manöverraum in Zeit
und Ort haben.
Während die dynamischen Objekte (z.B. Autos, Fußgänger) durch Bordsensorik und/oder
Echtzeit-Kommunikation in das Fahrzeug eingespielt werden können, bietet sich für die
statischen Objekte eine hochgenaue digitale Karte an, aus der unter Kenntnis der Egoposi-
tion des Fahrzeugs die relevanten manöverleitenden Bebauungen („Features“) ausgelesen
und mit der Manöverplanung in Einklang gebracht werden können.
51Technik
Vermessungsfahrten durch Spezialmesstechnik und Überführung der gemessenen
Punkte in spezielle Objektdaten
Konvertierung in das spezielle Kartenformat für HD-Maps: OpenDRIVE V1.4
Abrufmöglichkeit der gesamten Karte oder von Abschnitten vom DLR Geoserver
Anwendungsgebiete
Planung der Fahrtrajektorie durch Kenntnis über den möglichen
Manöverraum. Dies setzt eine exakte Egoposition voraus, z.B. durch D-GPS und
Koppelnavigation
Rejustage der aktuellen Egoposition durch Vergleich der durch die Bordsensorik
erkannten Objekte mit denen der im Manöverraum „vermuteten“ Objekte der digitalen
Karte (sogenannte „Optische Relativortung“). Dies setzt eine grobe Kenntnis über die
Egoposition des Fahrzeugs voraus (10m Genauigkeit sind hier ausreichend, also genügt
normale GPS-Position und Stützung durch Bordodometrie)
Anwendung der Karte für Road-Maintenance, also automatisches Erkennen von
Abweichungen der Karte mit der Realität durch sensorisch passend ausgestattete
Fahrzeuge
Nutzung der Karte für Simulationen von Verkehrsszenarien im mikroskopischen Bereich.
Dies können sowohl Verkehrsflusssimulationen (z.B. SUMO, VISSIM) sein, aber auch
Fahrten mit Probanden in Fahrsimulatoren zum Testen z.B. von innovativen Assistenz-
systemen oder VR-Komponenten in einem realistischen Umfeld
Beitrag zum vernetzten und automatisierten Fahren
Vorausschauende Planung der Fahrmanöver in Verbindung mit einer hochgenauen
digitalen Karte und fahrzeugseitiger Sensorik
Automatisierung der Fahrmanöver inklusive neuer Routenwahl
Visualisierung und Verarbeitung von Karteninhalten in GIS-Anwendungen
Automatisierung der Fahrmanöver inklusive neuer Routenwahl
Simulation von Verkehrssituationen auf dem digitalen Testfeld Düsseldorf
5253
EVALUATION
Die Bewertung in KoMoD betrachtet infra- die hiermit einhergehende Bereitstellung
strukturgestützte Services zur Unterstützung von fahrzeuggenerierten Daten, zuverlässi-
von automatisierten Fahrfunktionen und ge Informationen liefern und so die Infra-
Fahrmanövern unter den Gesichtspunkten struktursysteme sinnvoll ergänzen können.
der Verkehrseffizienz, der Verkehrssicherheit Gleiches gilt für die Bereitstellung von Daten
sowie der Wirkungen auf die Umwelt. Die im und Informationen für die Unterstützung
Testfeld erhobenen Fahrzeug- und Infra- von automatisierten Fahrfunktionen, die
strukturdaten gehen in die Beschreibung zumindest eine Redundanzebene zu der
des Verkehrsprozesses sowie in die Abbil- bordautonomen Sensorik bilden.
dung der Sollfunktionen der automatisier-
ten Fahrzeuge ein. Auf diese Weise werden Die Realisierung der Use Cases im Testfeld
sowohl die Systemfunktionen als auch die zielte vor allem auf die Umsetzung der
Systemrealisierung, unter Berücksichtigung Vernetzung selbst, sodass automatisierte
der eingangs genannten Bewertungskrite- Fahrfunktionen für die Bewertung nur im
rien, betrachtet. Hierzu erfolgte eine De- Use Case Parken zur Verfügung standen.
komposition der Fahrtverläufe in typische Die Analyse der Verkehrsprozesse erfolge
Verkehrssituationen sowie eine umfang- daher vornehmlich über Simulationsstudien,
reiche Analyse der Systemarchitektur. Die die auch eine Abbildung unterschiedlicher
Systemeinführung wird zudem durch ein Flottenzusammensetzungen ermöglichten.
Rollen- und Prozessmodell zur integrierten Die Vorbereitung, sowie die Durchführung
Betrachtung von technischen, rechtlichen der Simulationen, zeigte aber deutlich, dass
und betrieblichen Aspekten unterstützt. neben der zuverlässigen Bereitstellung von
Weiterhin erfolgte eine Prozessevaluation, Information und der hieraus resultierenden
die den Ablauf der Forschungsarbeiten Abbildung des Fahrzeugumfeldes natürlich
betrachtete. die fahrzeugspezifische Implementierung
der Fahrfunktion große Auswirkungen auf
Verkehrsprozess die, für die Beschreibung des Verkehrspro-
Die Applikationsentwicklung in KoMoD zesses relevanten, Parameter haben. Die
zielte nur begrenzt auf die Entwicklung Wirkungszusammenhänge sollen hier exem-
neuer verkehrstechnischer Steuerungsver- plarisch am Beispiel des Use Cases Koope-
fahren, sondern vielmehr auf die Nutzung rative Lichtsignalanlagen gezeigt werden:
fahrzeuggenerierter Daten in bestehenden Die Anzahl der Halte kann in einem ge-
Steuerungsverfahren sowie die Bereitstel- radeaus fahrenden Strom je nach Fahr-
lung von Infrastrukturinformationen an die strategie bis zu 50 % reduziert werden. Die
Fahrzeugsysteme. Die Ergebnisse zeigen, menschliche oder automatisierte Logik des
dass zukünftig eine umfassende Vernetzung Fahrprozesses muss jedoch entscheiden,
der Fahrzeuge mit der Infrastruktur, sowie ob ein „Durchsegeln“ des Streckenabschnit-
54
54tes mit sehr geringer Geschwindigkeit oder Die Kapazität kann bei einem rechts
alternativ ein Halt an der Lichtsignalanlage abbiegenden Strom um rund 80% erhöht
die individuell sinnvolle Strategie ist. werden.
Die Wahl der Geschwindigkeit beeinflusst Dieser Wert fällt mit nur rund 50% Kapazi-
die Zeitlücken, die dem den Geradeaus- tätssteigerung deutlich niedriger aus, wenn
strom querenden Strom zur Verfügung aufgrund eines hohen Aufkommens von
stehen. Simulationsszenarien zeigen, dass Fußgängern und Radfahrern das Fahrzeug
sich durch eine geringe Geschwindigkeit im eine risikovermeidende Fahrstrategie wählt,
Geradeausstrom die Anzahl der Halte beim d.h. auf größere Zeitlücken bei Fußgängern
bedingt verträglichen Linksabbiegerstrom und Radfahrern wartet.
um bis zu 25% erhöhen kann.
Eine weitere Reduktion von rund 30% der
Automatisierte Fahrzeuge können auf- Kapazitätssteigerung ist zu erwarten, wenn
grund geringer Abstände und wiederum aus die Geschwindigkeit beim Abbiegen auf-
der hieraus resultierenden Pulkbildung die grund von Sicherheitsüberlegungen weiter
Nachteile kompensieren, sodass die Anzahl gesenkt wird.
der Halte des querenden Linksabbiegers
sich wieder dem Ausgangsniveau anglei- Auch die Untersuchungen der übrigen Use
chen. Cases zeigen, dass die Wirkungen nicht
zuletzt durch die Umsetzung der Informati-
Der situative Vergleich der Ausstattungs- on in eine ggf. automatisierte Fahrstrategie
grade zeigt, dass bereits Ausstattungsgrade abhängen. So kann die Umsetzung des Use
von 10 % zu den genannten positiven Effek- Cases Parken im Quartier den Parksuchver-
ten im Geradeausstrom führen. Aufgrund kehr reduzieren. Die Automatisierung der
der hieraus resultierenden Beeinflussung Fahrt in das Parkhaus und das Aussteigen
der Pulkbildung im Hauptstrom machen sich von Personen kann die Qualität des Ver-
höhere Ausstattungsraten positiv bemerk- kehrsflusses auf der Strecke verschlechtern.
bar, die zusätzlichen Wirkungen fallen doch
deutlich geringer aus. Systemfunktion, Systemrealisierung und
Mit Blick auf die Automatisierung sind in Rollenmodell
der Zukunft auch stärker die Zusammen- Die Systemarchitektur wurde im Zuge der
hänge zwischen den Sicherheitsstrategien Bewertung der Systemsystemrealisierung
im Fahrzeug und den Steuerungsstrategien mittels Sequenzdiagrammen, die mit den
der Lichtsignalanlage zu berücksichtigen. jeweils für die Use Cases verantwortlichen
Auch dies soll exemplarisch am Beispiel der Partnern in einem iterativen Prozess erar-
LSA-Steuerung gezeigt werden: beitet wurden, bewertet. Eng verknüpft mit
55dieser technisch-systemischen Sicht sind Bewertung ohne das Wissen der Rahmen-
die organisatorischen Rollenmodelle, die bedingungen, die nicht zuletzt auch einen
Verantwortlichkeiten in dem System wie- politischen Aushandlungsprozess darstellen,
derspiegeln. In diesem Zusammenhang galt nur bedingt möglich.
es, die Vor- und Nachteile eines stärker auf
Mobilfunk (aktuell 4G) sowie Service-Pro- Prozessevaluation
vider gestützten Ansatzes mit dem eines Neben den verkehrlichen und technischen
dezentralen Ansatzes zu vergleichen, der Wirkungen erfolgte eine Bewertung des Pro-
die Fahrzeuge mit der Infrastruktur mittels jektes hinsichtlich der internen Prozesse und
WLAN (ITS-G5) verbindet. der mit ihnen verbundenen Zielsetzungen.
So zeigt sich, dass trotz Nutzung bekannter
Die Testergebnisse zeigen, dass beide Standards im Rahmen der Entwicklung eine
Ansätze generell geeignet sind. Hinsichtlich Vielzahl von Abstimmungen zur Realisierung
des Systemverhaltens (Latenzzeiten) zeigt der Infrastruktursysteme erforderlich war.
der Service-Provider gestützte Ansatz eine Die im Projekt realisierten Infrastruktur-
ausreichende Performance, wobei für eine services bewerten die Partner, die auf die
abschließende Bewertung auch hier wieder Realisierung von Fahrzeugsystemen zielen
gilt, dass die genauen Realisierungsformen jedoch sehr positiv und sehen hierin einen
und somit die Systemanforderungen zu- wertvollen Beitrag zur Weiterentwicklung
künftig automatisiert fahrender Fahrzeuge automatisierter Fahrfunktionen. Diese Sicht
noch nicht bekannt sind. Der schnellen Ver- auf den Forschungs- und Entwicklungspro-
fügbarkeit von Infrastrukturdaten, aufgrund zess zeigt die Notwendigkeit neuer For-
der Bereitstellung über einen zentralen schungsdesigns, die stärker einen konti-
Verkehrsrechner, steht eine vergleichsweise nuierlichen Betrieb einer technischen und
komplexe Wertschöpfungskette gegenüber. organisatorischen Forschungs-Basisinfra-
WLAN-basierte Systeme zeichnen sich hier struktur vorsehen, die kontinuierlich durch
durch eine geringere Komplexität aus, sind innovative Infrastrukturfunktionen ergänzt
jedoch aufwändiger in der Realisierung. werden kann, die aber auch eine stetige
Diese müssen mit Blick auf die Systemlauf- fahrzeugseitige Entwicklung, sowie die
zeiten sowie der notwendigen Governance Schärfung der Rollenverständnisse der
Regeln zwischen den beteiligten Partnern, beteiligten Akteure, sowie den Aufbau trag-
unter Berücksichtigung neuer fahrzeugseiti- fähiger Kooperationsstrukturen ermöglicht.
ger Systemanforderungen, weiter betrach-
tet werden. Aktuell ist eine abschließende
5657
58
Sie können auch lesen