Making Better Robots - Beiträge Österreichs zur Europäischen Robotics Research Roadmap - Institut für Vernetzte und Eingebettete ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Elektrotechnik & Informationstechnik DOI 10.1007/s00502-015-0304-7 BERICHT
Making Better Robots – Beiträge
Österreichs zur Europäischen Robotics
Research Roadmap
M. Hofbaur, A. Müller, J. Piater, B. Rinner, G. Steinbauer, M. Vincze, C. Wögerer
Mit dem Programm Horizon 2020 verfügt die Europäische Kommission über das größte zivile Forschungsprogramm der Welt. Robotik
und die eng verbundene Informations- und Kommunikationstechnologie (IKT) bilden einen Schwerpunkt des Programms. Das, für die
gesellschaftliche und ökonomische Entwicklung Europas wichtige, Thema Robotik optimal in diesem Programm zu repräsentieren, ist
Aufgabe des Public-Private Partnership euRobotics. Diese Organisation bildet die Schnittstelle zwischen der Europäischen Kommission
und den Forschern, der Industrie und den Nutzern der Robotik. Um das Marktpotential der Robotik zu heben und die damit verbunde-
nen zukünftigen Forschungs- und Entwicklungsfragen zu identifizieren, wurde eine Strategic Research Agenda für Robotik in Europa
für die Jahre 2014–2020 entwickelt. In diesem Artikel werden Forschungsinstitutionen und Projekte in Österreich vorgestellt, die bereits
an der Umsetzung dieser Roadmap arbeiten. Weiters wird aufgezeigt, wo Österreich noch Bedarf an Forschung und Entwicklung hat.
Diese Bestandsaufnahme wird in die Entwicklung einer österreichischen Robotics Research Roadmap einfließen. Diese Roadmap wird
von der Arbeitsgruppe Robotik der Gesellschaft für Mess-, Automatisierungs- und Robotertechnik (GMAR) entwickelt werden und
sowohl Forschern und der Industrie als auch der öffentlichen Hand als Leitfaden dienen, um das Potential der Robotik in Österreich zu
stimulieren und auszubauen.
Schlüsselwörter: Robotik; Forschung; Horizon 2020; Projekte; Potential
Making Better Robots—Austria’s contribution to the European Robotics Research Roadmap.
With the program Horizon 2020 the European commission has the largest civilian research program worldwide. Robotics and the
closely related field information and communication technology (ICT) form core areas of the program. The optimal representation of
this topic is immensely important for the social and economic development in Europe within the program is the mission of the public-
private partnership euRobotics. This organization acts as an interface between the European commission, researcher, industry and
end-user in the area of robotics. In order to lift the market potential of robotics and to identify the related research and development
questions a Robotics Strategic Research Agenda for Europe for the year 2014–2020 was developed. In this article we present Austrian
research institutions and projects that already work on the realization of that roadmap. Moreover, we will pinpoint areas where Austria
has a need for research and development. This assessment will be integrated in the development of an Austrian Robotics Research
Roadmap. This roadmap will be developed by the robotics working group within society for measurement, automation and robot
technology (GMAR) and should serve research, industry and public stakeholder as a guideline to stimulate and extend the potential of
robotics in Austria.
Keywords: robotics; research; Horizion 2020; projects; potential
© Springer Verlag Wien 2015
1. Einleitung siv verbessern. Neben der Industrialisierung kann die Robotik selbst
Robotik und die eng verbundene Informations- und Kommunika- als Markt zur Lösung ökonomischer Probleme fungieren. Die Ent-
tionstechnologie (ICT) wurden von der Europäischen Kommission wicklung und der Verkauf innovativer Robotik-Komponenten, gan-
als zentrale Zukunftsthemen identifiziert, die dabei helfen können, zer Robotik-Systeme und der relevanten bzw. damit einhergehenden
die zukünftigen ökonomischen und gesellschaftlichen Herausforde-
rungen zu lösen. Hinsichtlich der ökonomischen Herausforderun-
gen, wie zum Beispiel der globalen Konkurrenzfähigkeit europäi- Hofbaur, Michael, Joanneum Research Forschungsgesellschaft mbH, Institut für Robotik
scher Produkte und Services kann Robotik in drei Bereichen wichtige und Mechatronik, Lakeside Park B08a, 9020 Klagenfurt am Wörthersee, Österreich;
Müller, Andreas, Institut für Robotik, Johannes Kepler Universität Linz,
Impulse liefern. Erstens kann der Einsatz von Robotik-Technologie Altenbergerstraße 69, 4040 Linz, Österreich; Piater, Justus, Institut für Informatik,
die Konkurrenzfähigkeit der europäischen Industrie durch einen er- Universität Innsbruck, Technikerstraße 21A, 6020 Innsbruck, Österreich; Rinner,
höhten Automatisierungsgrad und die Möglichkeit der Produktion Bernhard, Institut für Vernetzte und Eingebettete Systeme, Alpen-Adria-Universität
von innovativen und individualisierten Produkten verbessern. Hier Klagenfurt, Lakeside Park B02, 9020 Klagenfurt am Wörthersee, Österreich; Steinbauer,
Gerald, Institut für Softwaretechnologie, Technische Universität Graz, Inffeldgasse 16b/2,
ist ein Ziel zur Sicherung des Wohlstandes eine Reindustrialisierung
8010 Graz, Österreich (E-Mail: steinbauer@ist.tugraz.at); Vincze, Markus, Institut für
Europas. Wobei hier nicht nur auf große Player der Industrie ab- Automatisierungs- und Regelungstechnik, Technische Universität Wien, Gußhausstraße
gezielt wird. Speziell ein vermehrter Einsatz von Robotik in Klein- 25-25a/E376, 1040 Wien, Österreich; Wögerer, Christian, Profactor GmbH,
und Mittelbetrieben kann die ökonomische Stärke Europas mas- Im Stadtgut A2, 4407 Steyr-Gleink, Österreich
0 0000 0. Jahrgang © Springer Verlag Wien heft 0.0000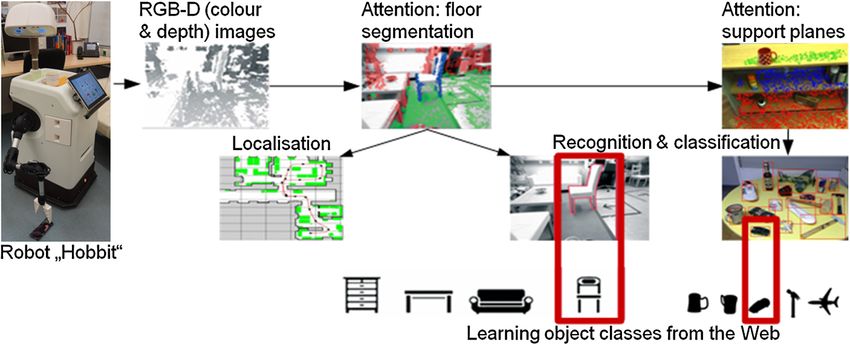
BERICHT M. Hofbaur et al. Making Better Robots – Beiträge Österreichs
Tab. 1. Dimensionen der Strategic Research Agenda
Dimension Subdimension Kategorien
Market Domains Fertigung, Healthcare, Landwirtschaft, Logistik, Civil Robots, Consumer Robots, Commercial
Robots, Militär
Robot Categories Umgebung Luft, Land, Wasser, Unterwasser, Innenbereich, Außenbereich
Interaktion Vorprogrammiert, teleoperiert, überwacht, kooperativ, autonom
Format Manipulatoren, mobile Plattform, Humanoide
Robot Abilities Konfiguration, Adaption, Interaktion, Zuverlässigkeit, Bewegung, Manipulation, Wahrnehmung,
Autonomie, Kognition
Value Chains Technologietransfer, Fertigung von Komponenten und Systemen, Service, Integration
Services soll als globaler Markt aufgebaut werden, der von europäi- formulieren und nationalen Unternehmen, Institutionen und Förder-
schen Playern bedient wird. Drittens kann Robotik, ähnlich wie das gebern als Leitfaden zur Verfügung stellen.
Internet oder Smartphone, neue Produkttypen und Märkte schaf- Die SRA ist entlang folgender vier zentraler Dimensionen aufge-
fen. Wobei hier nicht nur auf komplett neue Ideen gesetzt wird, baut: (1) Market Domains, (2) Value Chains, (3) Robot Categories
sondern auch bestehende Anwendungsbereiche, in denen Robotik und (4) Robot Abilities. „Market Domains“ kategorisieren mögliche
bisher nur eingeschränkt oder gar nicht angewandt wird, wie zum Märkte für die Anwendung von Robotik und die dahinterstehen-
Beispiel die Landwirtschaft, positive Impulse bekommen. den Geschäftsmodelle. Die möglichen Anwendungen reichen hier-
Auf Basis dieses Potentials von Robotik und IKT wurden diese ent- bei von der Fertigung über Healthcare bis zu Consumer Robots. „Va-
sprechend im Förderungsprogramm Horizon 2020 der Europäischen lue Chains“ geben an, wie Wertschöpfung in einem Markt gene-
Kommission verankert. Mit dem Programm Horizon 2020 verfügt riert wird. Hier reicht die Bandbreite vom Transfer von Forschungs-
die Europäische Kommission über das größte zivile Forschungspro- ergebnissen in die Industrie über die Produktion von Robotern und
gramm der Welt. Robotik und die eng verbundene Informations- Robotik-Komponenten bis zu der Zur-Verfügung-Stellung von spezi-
und Kommunikationstechnologie (IKT) bilden einen Schwerpunkt ellen Services. „Robot Categories“ geben Aufschluss über die Form,
des Programms. Das für die gesellschaftliche und ökonomische Ent- die Umgebung, die Funktion und Arbeitsweise von Robotern. Die
wicklung Europas wichtige Thema Robotik optimal in diesem Pro- Arbeitsweise reicht von vorprogrammiert oder teleoperiert bis zu
gramm zu repräsentieren, ist Aufgabe des Public-Private Partnership kooperativ oder autonom. „Robot Abilities“ beschreiben Fähigkei-
euRobotics. Neben der euRobotics beschäftigt sich die Public-private ten, die Roboter haben müssen, um Aufgaben in gegebenen Um-
Partnership Factory of the Future vor allem mit den dem Thema Ro-
gebungen umsetzen zu können. Diese reichen von der Wahrneh-
botik in der Fertigung. Diese Organisation bildet die Schnittstelle
mung über die Bewegungsplanung bis bin zu kognitiven Fähigkei-
zwischen der Europäischen Kommission und den Forschern, der In-
ten. Details zu allen Dimensionen sind Tab. 1 und der SRA [1] zu
dustrie und den Nutzern der Robotik. Um das Marktpotential der Ro-
entnehmen.
botik zu heben und die damit verbundenen zukünftigen Forschungs-
Im folgenden Beitrag werden die zentralen Institutionen Öster-
und Entwicklungsfragen zu identifizieren, wurde eine Strategic Re-
reichs, die sich mit Forschung im Bereich Robotik beschäftigen, all-
search Agenda (SRA) für Robotik in Europa für die Jahre 2014–2020
gemein vorgestellt und anhand der Dimensionen der SRA eingehen-
entwickelt. In diesem Artikel werden Forschungsinstitutionen und
der dargestellt. Eine Präsentation exemplarischer Forschungsprojek-
Projekte in Österreich vorgestellt, die bereits an der Umsetzung die-
te der Forschungsinstitute rundet diese Darstellung der österreichi-
ser Roadmap arbeiten. Des Weiteren wird aufgezeigt, wo Österreich
schen Forschungsaktivitäten ab. Der Beitrag schließt mit einem Aus-
noch Bedarf an Forschung und Entwicklung hat. Diese Bestands-
blick auf die mögliche Beteiligung österreichischer Institutionen bei
aufnahme wird in die Entwicklung einer österreichischen Robotics
Research Roadmap einfließen. Diese Roadmap wird von der Arbeits- der Umsetzung der SRA.
gruppe Robotik der Gesellschaft für Mess-, Automatisierungs- und
Robotertechnik (GMAR) entwickelt werden und sowohl Forschern 2. Die Robotik-Forschungslandschaft in Österreich
und der Industrie als auch der Öffentlichen Hand als Leitfaden die- Die österreichische Robotik-Forschungslandschaft zeichnet sich
nen, um das Potential der Robotik in Österreich zu stimulieren, aus- durch eine große Bandbreite der Forschungsinstitutionen und For-
zubauen und schlussendlich nachhaltig zu nutzen. schungsthemen aus. Anhand der drei Dimensionen Forschungsthe-
Um diese Aktivitäten auf europäischer Ebene national besser zu men, Technologie-Reifegrad (Technology Readiness Level—TRL) und
spiegeln und anzudocken, haben sich österreichische Vertreter der Beteiligung an nationalen und internationalen Forschungsprojekten
Forschung und der Industrie zusammengefunden und die Arbeits- sieht man, dass die österreichische Robotik-Forschung zwar klein-
gruppe Robotik unter dem Dach der neu gegründeten österrei- teilig, aber generell stark aufgestellt ist. Die behandelten Themen
chischen Gesellschaft für Mess-, Automatisierungs- und Roboter- reichen von der Bewegungssteuerung von Manipulatoren und mo-
technik (GMAR) gegründet. Die Installation der Arbeitsgruppe im bilen Systemen über die Wahrnehmung und das Verstehen von Um-
Schnittbereich der drei thematisch stark verbundenen Gebiete er- gebungen und der Interaktion zwischen Mensch und Maschine bis
laubt es, die Robotik zentral zu repräsentieren und Synergien zu den zu Themen der Künstlichen Intelligenz. Beim TRL werden aufgrund
anderen Feldern zu nutzen. Die GMAR-Arbeitsgruppe Robotik sieht der verschiedenen Interessen der beteiligten Institution – diese rei-
sich als neutrale Repräsentation der Forschung und Industrie im Be- chen von Grundlagen-orientierter Forschung bis zur Entwicklung
reich Robotik und soll als Schnittstelle sowohl zu den Organisationen marktreifer Prototypen – viele Stufen abgebildet. Wobei bei der
auf europäischer Ebene als auch zu Organisationen auf nationaler langfristigen und sehr grundlegenden Forschung sowie beim Über-
Ebene, der Öffentlichen Hand und Endnutzern bilden. In einem ers- gang zu Produkten, Stichwort „Spin-offs“ und Entrepreneurship,
ten Schritt wird diese Arbeitsgruppe die SRA auf nationaler Ebene noch erheblicher Bedarf besteht.
heft 0.0000 © Springer Verlag Wien e&i elektrotechnik und informationstechnik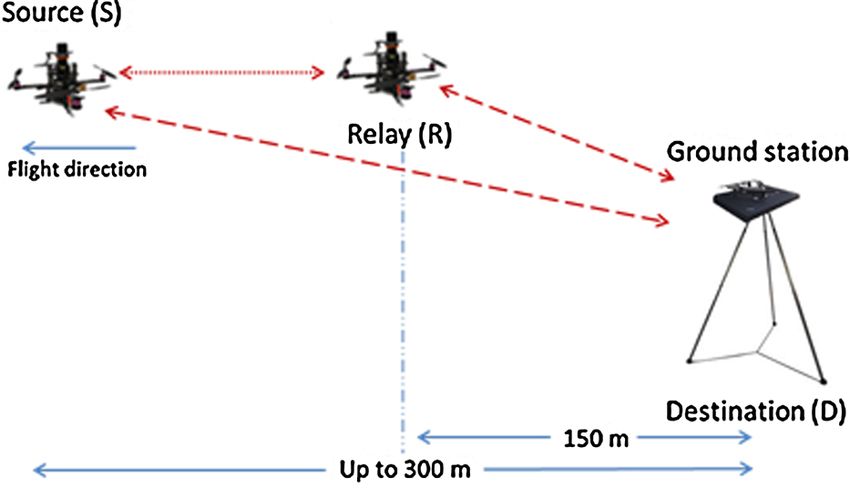
M. Hofbaur et al. Making Better Robots – Beiträge Österreichs BERICHT
2.1 Joanneum Research Forschungsgesellschaft mbH Algorithmen. Als Ergebnis stehen hocheffiziente Modelle und mo-
Die Joanneum Research Forschungsgesellschaft mbH (JR) ist eine un- dellbasierte Regelkonzepte für komplexe Robotersysteme zur Verfü-
ternehmerisch orientierte Innovations- und Technologieanbieterin, gung, die direkt in praxistaugliche Lösungen münden.
die, eingebunden in ein internationales Netzwerk, seit mehr als drei- Die Forschungsschwerpunkte des ROBIN sind die Optimalsteue-
ßig Jahren Spitzenforschung auf internationalem Niveau betreibt. rung (zeit- und energieoptimal) und die Kraft-Positionsregelung von
Mit dem Fokus auf angewandte Forschung und Technologieent- Industrierobotern [5] und flexiblen Leichtbaurobotern [7], die opti-
wicklung nimmt sie als „Innovation Company“ an den Standorten male Bahnplanung für mobile Roboter, die modellbasierte Regelung
Steiermark und Kärnten eine Schlüsselfunktion im Technologie- und neuartiger Parallelkinematiken [9, 10], die Regelungskonzepte für
Wissenstransfer ein. Der Stellenwert von Robotik in seinen vielfälti- Spezialanwendungen [6] sowie Humanoide (Laufmaschinen) [8].
gen Ausprägungsformen für das Wirtschafts- und Alltagsleben spie-
gelt sich auch in den Aktivitäten von JR wider und wurde insbeson-
2.3 Universität Innsbruck
dere 2014 durch die Gründung des Institutes ROBOTICS entspre-
Gegründet im Jahr 1669, ist die Universität Innsbruck heute mit
chend zentral verankert. An der Joanneum Research Forschungs-
mehr als 28.000 Studierenden und über 4.500 Mitarbeitenden
gesellschaft mbH sind aktuell die Institute ROBOTICS, das Institut
die größte und wichtigste Forschungs- und Bildungseinrichtung in
DIGITAL sowie das Institut MATERIALS als Forschungspartner für
Westösterreich. Robotik-relevante Forschung wird im Wesentlichen
Robotik-Anwendungen in Wirtschaft und Industrie tätig. Das Jo-
in zwei Arbeitsgruppen betrieben. Der Arbeitsbereich Geometrie
anneum Research-Institut DIGITAL als führender Kompetenzträger
und CAD ist am Institut für Grundlagen der Technischen Wissen-
im Bereich der Informations- und Kommunikationstechnologie (IKT)
beschäftigt sich zum Beispiel mit Themenstellungen des maschinel- schaften an der Fakultät für Technische Wissenschaften angesiedelt.
len Sehens für industrielle Anwendungen als auch mit dem Bereich Die Arbeitsgruppe für Intelligente und Interaktive Systeme ist Be-
Robotik außerhalb von Produktionsbetrieben. Innovative User In- standteil des Instituts für Informatik an der Fakultät für Mathematik,
terfaces und Forschung zu multimodalen Human/Machine Interfa- Informatik und Physik. Die Universität Innsbruck bearbeitet Themen
ces runden das Forschungsportfolio von DIGITAL mit Robotik-Bezug der Kinematik, Wahrnehmung und des Lernens. Der Arbeitsbereich
ab. Am Institut MATERIALS werden einerseits Roboter als Werk- Geometrie und CAD arbeitet im Bereich Computational Kinema-
zeug für innovative Bearbeitungsprozesse eingesetzt, andererseits tics. Es werden verschiedenste Roboterstrukturen, wie z. B. paral-
bieten Forschungsarbeiten des Institutes im Bereich der Sensorik, lele Manipulatoren, auf ihre kinematischen Eigenschaften mit Me-
wie zum Beispiel pyroelektrische Sensoren zur Personen- bzw. Ob- thoden der algebraischen Geometrie, der Differential- und mehr-
jektdetektion, enge Anknüpfungspunkte zur Robotik. Die Schwer- dimensionalen Geometrie untersucht. Untersucht werden z. B. di-
punkte von ROBOTICS umfassen primär Forschungsthemen der rekte und inverse Kinematik, Bauformen, Singularitäten, Arbeitsräu-
Mensch/Roboter-Kollaboration und -Interaktion mit Anwendung in me und Operationsmodi. Wesentliches Forschungsziel ist die globale
innovativen Produktionsprozessen sowie die Thematik Robot-Safety. Beschreibung der Bewegungsmöglichkeiten der Manipulatoren. Die
Zur Abdeckung dieses Themenspektrums werden Forschungsarbei- Arbeitsgruppe für Intelligente und Interaktive Systeme befasst sich
ten aus der Sensorik und Aktuatorik, der rechnergestützten Daten- mit Wahrnehmung und Lernfähigkeiten für autonome Roboter und
fusionierung und Perzeption, der Aufgaben- und Bewegungspla- andere interaktive Systeme. Das Ziel der Forschung ist es, Roboter
nung und Regelungstheorie, der Echtzeit-Datenverarbeitung sowie lernfähig zu machen, damit sie Verständnis für ihre Umgebung ent-
der Robotik-Mechanismen im Allgemeinen behandelt. Die Themen- wickeln können, das es ihnen ermöglicht, mit ihr zweckgerichtet zu
stellung Robot-Safety beinhaltet einerseits hoch-zuverlässige Syste- interagieren.
me, sichere Sensorik und Aktuatorik, aber auch die sicherheitsge-
richtete Systementwicklung funktional sicherer Robotiksysteme.
2.4 Alpen-Adria-Universität Klagenfurt
Mit über 10.000 Studierenden ist die Alpen-Adria-Universität Kla-
2.2 Johannes Kepler Universität Linz
genfurt die führende akademische Bildungsinstitution in Kärnten
Seit ihrer Gründung 1966 hat sich die Johannes Kepler Universi-
und Drehscheibe für Wissenserwerb, Wissensaustausch und Wis-
tät Linz (JKU) als innovatives Zentrum für Wissenschaft und Gesell-
senstransfer in der gesamten Alpen-Adria-Region. Die Fakultät für
schaft etabliert und ist mit ca. 18.000 Studierenden und 1.800 wis-
Technische Wissenschaften an der Alpen-Adria-Universität Klagen-
senschaftlichen Mitarbeiter die größte Bildungs- und Forschungs-
furt wurde im Jahr 2007 gegründet, ist seither stark gewachsen
einrichtung in Oberösterreich. Am Institut für Robotik (ROBIN) der
und gliedert sich aktuell in neun Institute aus den Bereichen Ma-
JKU wird die Robotik als domänenübergreifende Disziplin verstan-
thematik, Informatik, Informationstechnik sowie Didaktik. Das Stu-
den, die einen ganzheitlichen Zugang erfordert, wobei der Fokus auf
dienangebot der Fakultät umfasst Technische Mathematik, Ange-
einer ganzheitlichen Modellierung physikalischer Phänomene liegt.
wandte Informatik, Informationstechnik und die Unterrichtsfächer
Innerhalb des Fachbereichs Mechatronik und mit der engen Verbin-
Informatik und Mathematik. Gemeinsam mit der Fakultät für Wirt-
dung zum Linz Center of Mechatronics (LCM) hat das ROBIN exzel-
schaftswissenschaften werden die Studien Informatikmanagement
lente Voraussetzungen für die disziplinenübergreifende Forschung.
Die mechanischen Eigenschaften sind von entscheidender Bedeu- und Informationstechnik: Wirtschaftsingenieur angeboten. An Ro-
tung für die dynamischen Charakteristika und die Leistungsfähig- botikthemen wird an der Alpen-Adria-Universität im Rahmen des
keit eines robotischen Systems. Aus diesem Grund sind der Entwurf strategischen Schwerpunktes Networked and Autonomous Systems
und die Regelung moderner Robotersysteme nicht ohne hinreichend der Fakultät für Technische Wissenschaften geforscht. Insgesamt sie-
genaue Modelle denkbar. Am ROBIN werden mathematische Me- ben Forschungsgruppen (Bettstetter, Elmenreich, Friedrich, Hellwag-
thoden für die Modellierung komplexer mechanischer Systeme ent- ner, Kyamakya, Rinner und Zangl) aus vier Instituten arbeiten in den
wickelt, die als Grundlage für die Analyse und Synthese und letzt- Bereichen: Sensor- und Aktortechnik, Vernetzung, Koordination und
endlich die modellbasierte Regelung dienen. Dabei bedient sich das Selbstorganisation von Multi-Robot-Systemen sowie Modellierung,
ROBIN der Methoden aus der Mehrkörperdynamik und der nichtli- Planung und Optimierung mit den Anwendungsfeldern Automoti-
nearen Steuertheorie und entwickelt bei Bedarf neue Methoden und ve, Transportation, Rescue und Multimedia.
0 0000 0. Jahrgang © Springer Verlag Wien heft 0.0000BERICHT M. Hofbaur et al. Making Better Robots – Beiträge Österreichs
2.5 Technische Universität Graz punkte der Forschung am Institut für Automatisierungs- und Rege-
Die Technische Universität Graz (TU Graz) verfügt über rund 14.000 lungstechnik liegt im Bereich Assistenzroboter für Anwendungen im
Studierende und 2.400 Mitarbeiter/innen und bietet mit sieben Bereich der Industrie und neuen Service-Einsätzen. Die Arbeitsgrup-
Fakultäten technische und naturwissenschaftliche Lehre und For- pe „Sehen für Roboter“ unter der Leitung von Markus Vincze liefert
schung in einer großen Bandbreite. Robotik als interdisziplinäres Feld Lösungen zum Erfassen von Objekten und Assistenzrobotern für al-
ist an der TU Graz in der Lehre durch eine Vielzahl von Instituten te Personen. Insbesondere ist das Ziel, Robotern das „Sehen“ bei-
aus den Bereichen Maschinenbau, Elektrotechnik und Informatik re- zubringen. Dazu entwickelt das ACIN Methoden zur Wahrnehmung
präsentiert. In der Forschung wird die Robotik primär von den In- von Strukturen und Objekten, so dass Roboter handeln und daraus
stituten für Grundlagen der Informationsverarbeitung, Maschinel- lernen können. Eine dreidimensionale Modellierung von Objekten
les Sehen und Darstellen und Softwaretechnologie vertreten. Die erlaubt die anschließende Erkennung, eine Kategorisierung, das Be-
Bandbreite der Robotik-Forschung an der TU Graz reicht von reiner rechnen von Greifpunkten und die Analyse der Form, um Funktio-
Grundlagen-orientierten Forschung bis hin zur angewandten For- nen von Objekten abzuleiten. Die komplette Erfassung von Objek-
schung. Das Institut für Grundlagen der Informationsverarbeitung ten ermöglicht die Handhabung und Interaktion in Anwendungen
forscht an grundlegenden Fragestellungen der Informationsverar- im Service-Bereich als auch in der Industrie. So wird es möglich, die
beitung in biologischen neuronalen Systemen, neuronalen Netzwer- Form von Teilen zu erfassen und je nach den Merkmalen der Form
ken, der Komplexitätstheorie und dem Maschinellen Lernen. Speziell die entsprechenden Bearbeitungsschritte auszuführen. Dies führt zu
das Lernen von natürlichen Bewegungsmustern ist hier für die Ro- flexibler Fertigung bis zu Losgröße eins.
botik interessant. Das Institut für Maschinelles Sehen und Darstellen
ist die einzige österreichische Forschungseinrichtung, die sowohl die 2.7 Profactor GmbH
Computer-Grafik als auch die Computer-Vision unter einem Dach Profactor befasst sich seit seinem Bestehen – mittlerweile 20 Jahre
vertritt. Der Bereich Visual Computing wird in voller Breite in Lehre – mit Robotik. Die Entwicklungen erfolgen im Forschungsschwer-
und Forschung vom Institut vertreten. Das Institut beheimatet vier punkt Industrielle Assistenzsysteme. Im Fokus steht die bestmögli-
Professoren und hat ca. 80 Mitarbeiter/innen, wovon der Großteil che Kooperation von Mensch und Maschine. Das bedeutet einer-
über Drittmittel finanziert wird. Die Forschungsschwerpunkte des seits eine mentale und ergonomische Entlastung des Menschen und
Institutes sind unter anderem Mobile Computer Vision, Augmented gleichzeitig ein Upgrade des menschlichen Arbeitsplatzes in der Pro-
Reality, Object Detection and Recognition, Robot Vision, Aerial Visi- duktion. Der Werker, der sich um schwere Teile in einer Kiste bückt,
on, 3D Reconstruction, Visual Learning, Convex Optimization, Medi- wird damit bald der Vergangenheit angehören. Adaptive Roboter,
cal Visual Computing, Visualization. Speziell die Aerial Vision Group die mit dem Kollegen Mensch sicher agieren können, sind zudem
des Institutes beschäftigt sich mit Fragestellungen aus der Robotik ein Grundstein für eine hochflexible, individualisierte und dennoch
und der Computer Vision. Das Institut für Softwaretechnologie be- wettbewerbsfähige Produktion. Die Abteilung Robotik und Assisti-
fasst sich mit theoretischen, praktischen und angewandten Aspek- ve Systeme umfasst Mitarbeiter/innen aus den Bereichen Mathema-
ten der Softwaretechnologie. Forschungsgebiete liegen im Bereich tik, Informatik, Mechatronik, Physik und Maschinenbau. Die Gruppe
intelligenter Systeme, formale Verifikation und systematisches Tes- hat umfangreiche und mehrjährige Erfahrung in industrieller Bild-
ten von Software, Künstliche Intelligenz, Wissensrepräsentation, Re- verarbeitung (2D und 3D), autonomen Robotersystemen, intuiti-
quirements Engineering, Recommender Systeme, Optimierung von ven Assistenzsystemen und Mensch-Roboter-Interaktion. Der For-
industriellen Problemen, Spieltheorie, Kombinatorik und Komplexi- schungsfokus von Profactor ist hauptsächlich die Entwicklung und
tätstheorie, Algorithmen und Rechnerischer Geometrie. Das Institut Evaluierung von industriellen (Roboter-)Assistenzsystemen. Die un-
beherbergt die Arbeitsgruppe Autonome Intelligente Systeme, die terschiedlichen Abteilungen fokussieren sich auf verschiedene The-
sich mit der Anwendung von Methoden der Künstlichen Intelligenz, men für Assistenzsysteme, wie z. B. Montageassistenz, Entschei-
insbesondere der Self-Awareness und der Entscheidungsfindung in dungsassistenz oder Inspektionsassistenz. Die Assistenzsysteme wer-
autonomen Robotern, beschäftigt. Das Institut beheimatet drei Pro- den Großteils für industrielle Anwendungen entwickelt, wo sie den
fessoren und ca. 30 Mitarbeiter/innen. Mensch bei gefährlichen, langweiligen oder wiederholenden Tätig-
keiten (z. B. Einreichung von Teilen. . .) unterstützen. Dadurch kann
2.6 Technische Universität Wien sich der Mensch auf gewinnbringenden Aufgaben (z. B. Montie-
An der Technischen Universität Wien (TU Wien) wird seit 200 Jah- ren von Teilen. . .) fokussieren. Diese Systeme sind teilautonom und
ren im Dienste des Fortschritts geforscht, gelehrt und gelernt. Die kooperativ in ihrer Zusammenarbeit mit dem Menschen. Basisfähig-
TU Wien zählt zu den erfolgreichsten Technischen Universitäten keiten wie Bewegungsabläufe (z. B. Greifen, Positionieren) und Er-
in Europa und ist mit über 28.000 Studierenden und rund 3.300 kennen von Komponenten sind fix programmiert. Industrielle Assis-
Wissenschaftler/innen Österreichs größte naturwissenschaftlich- tenzsysteme werden für viele unterschiedliche Aufgaben eingesetzt,
technische Forschungs- und Bildungseinrichtung. Das Institut für unter anderem für Montage, Oberflächenbearbeitung, Transport, In-
Automatisierungs- und Regelungstechnik (ACIN) gehört der Fakul- spektion, Greifen und Handling von unterschiedlichen Teilen.
tät für Elektrotechnik und Informationstechnik der Technischen Uni-
versität Wien an. Das Institut betreibt Grundlagenforschung auf den 3. Beiträge Österreichs zur European Robotics Roadmap
Gebieten der industriellen Automatisierungstechnik, der kognitiven Die Beiträge der österreichischen Forschungsinstitute zur Erreichung
Robotik sowie der Modellierung, Optimierung, Steuerung und Rege- der Ziele der European Robotics Roadmap sollen anhand der vier
lung komplexer dynamischer Systeme und ist bestrebt, im Rahmen zentralen Dimensionen gezeigt werden. Im Folgenden wird ge-
von Industriekooperationen die neuesten Erkenntnisse und Metho- zeigt, welche Forschungsinteressen die einzelnen Institutionen ha-
den auf den jeweiligen Gebieten zur Lösung konkreter praktischer ben. Weiters wird dargelegt, in welchen Anwendungsdomänen die-
Problemstellungen anzuwenden. se Forschungen angesiedelt sind, welche Robotertypen bearbeitet
Die TU Wien ist Forschungspartner für namhafte internationale werden und welche neuen Fähigkeiten für Roboter aus diesen For-
und nationale Unternehmen sowohl im Rahmen von Forschungs- schungen entstehen. Eine Zusammenfassung der Beiträge ist in
kooperationen als auch in beratender Funktion. Einer der Schwer- Tab. 2 zu sehen.
heft 0.0000 © Springer Verlag Wien e&i elektrotechnik und informationstechnikM. Hofbaur et al. Making Better Robots – Beiträge Österreichs BERICHT
Tab. 2. Beiträge österreichischer Forschungsinstitutionen zur Erreichung der Ziele der European Roadmap
Institution Forschungsfokus Market Domains Robot Categories Robot Abilities
Joanneum Research Computer Vision, Fertigung, Manipulatoren, Interaktion,
Sensoren, Aktoren, Commercial mobile Plattformen, Wahrnehmung,
Human-Robot Robotics, Logistik Innenbereich, Konfiguration,
Collaboration, Robot Außenbereich, Manipulation,
Safety kooperativ, Zuverlässigkeit
autonom
Johannes Kepler Universität Modellierung Fertigung, Manipulatoren, Bewegungssteuerung,
komplexer Systeme, Healthcare, Logistik mobile Plattformen, Manipulation,
optimale Steuerung, Innenbereich, Autonomie,
Regelungstechnik vorprogrammiert Interaktion
Universität Innsbruck Kinematik, Roboter- Fertigung, Manipulatoren, Konfiguration,
architekturen, 3D Consumer Robots Innenbereich, Bewegungsplanung,
Computer Vision, kooperativ Adaption,
Lernen, Greifen Manipulation,
Wahrnehmung,
Interaktion
Universität Klagenfurt vernetzte und Landwirtschaft, Civil Flug- und Wahrnehmung,
autonome Systeme, Robots Bodenroboter, Autonomie,
Unmanned Aerial Außenbereich, Interaktion
Vehicles, Multi- vorprogrammiert,
Roboter-Systeme autonom
Technische Universität Graz Kamera-basiertes Civil Robots, Flug- und Konfiguration,
SLAM, Computer Commercial Robots, Bodenroboter, Adaption,
Vision, Lernen, Consumer Robots Innenbereich, Wahrnehmung,
neurale Informati- Außenbereich, Autonomie,
onsverarbeitung, teleoperiert, Kognition,
Reasoning, Planen, vorprogrammiert, Zuverlässigkeit
Diagnose, Testen, autonom
Kontrollarchitekturen
Technische Universität Wien Automatisierung, Fertigung, Manipulatoren, Interaktion,
cognitive Robotics, Commercial Robots, mobile Plattformen, Wahrnehmung,
Computer Vision, Consumer Robots Innenbereich, Manipulation,
Navigation, vorprogrammiert, Kognition
Manipulation, autonom
Human-Robot
Interaction
Profactor Industrielle Fertigung, mobile Wahrnehmung,
Assistenzsysteme, Commercial Robots Manipulatoren, Interaktion,
Computer Vision, Innenbereich, Manipulation,
Human-Robot- vorprogrammiert, Kognition
Interaktion kooperativ,
autonom
3.1 Market Domains vem Charakter und Anwendungen in flexiblen Produktionsszena-
Als Forschungspartnerin für Wirtschaft und Industrie sind Themen- rien. Daneben bilden Anwendungen in den Bereichen Healthcare,
stellungen aus der industriellen, aber auch individuellen Fertigung Transport und Consumer Products die Triebfeder der Forschung.
von Gütern mit hoher Wertschöpfung ein wesentliches Anwen- Anvisierte Anwendungsgebiete der Forschung der Universität
dungssegment der bei Joanneum Research erforschten Robotik-
Innsbruck erstrecken sich von der Service- und Haushaltsrobotik
Technologie. Robotik-Systeme an sich und die damit einhergehen-
über flexible Fabrikation bis hin zu wissenschaftlichen Explorations-
den Technologiefelder der Sensorik, Automatisierungs- und Re-
robotern – alle Gebiete, die ein gewisses Maß oder vollständige Au-
gelungstechnik, der informationstechnischen Einbindung in einem
größeren Systemkontext (Stichwort Industrie 4.0 bzw. Industrial In- tonomie des Roboters erfordern, während sie in Umgebungen ope-
ternet) sind hierbei zentrale Schwerpunkte an den beteiligten Insti- rieren, die nicht für sie gestaltet wurden. Zivile Anwendungen, wie
tuten. Aktueller Hauptfokus des Institutes für Robotik der Johan- die Überwachung bzw. Such- und Rettungseinsätze [21], liegen ne-
nes Kepler Universität sind Industrieanwendungen mit repetiti- ben Anwendungen in der Landwirtschaft im Interesse der Alpen-
0 0000 0. Jahrgang © Springer Verlag Wien heft 0.0000BERICHT M. Hofbaur et al. Making Better Robots – Beiträge Österreichs
Adria-Universität Klagenfurt. Daneben sind Mapping und Envi- bar. Selbstverständlich wird jedoch in angewandten Projekten For-
ronmental Monitoring potentielle Anwendungen. schungsarbeit zu spezielleren Anwendungsfällen wie zum Beispiel
Das ACIN der Technischen Universität Wien ist an der Anwen- fliegende Roboter für Dokumentationszwecke geleistet. Die Arbeits-
dung von Robotern in der automatisierten Fertigung und im Bereich gruppe Aerial Vision beschäftigt sich mit dem Bereich Flugrobotik.
Haushaltsroboter, die das tägliche Leben erleichtern, interessiert. Das Institut hat mehrere Flugplattformen (Quadcopter, Octocopter,
Bildgebende Methoden helfen, die Losgröße bis auf eins zu reduzie- Fixed-Wing-Flugzeuge), mit denen Forschung im Bereich der Flug-
ren. Und Sehen ermöglicht zukünftigen Robotern zu Hause und in robotik betrieben wird [26]. Aufgrund der Forschungsausrichtung
der Fertigung, Teile zu erkennen und handzuhaben. Grundsätzlich liegen beim ACIN der Technischen Universität Wien mobile Platt-
versteht sich die Technische Universität Graz als Institution, die formen und Roboterarme und deren Kombination im Fokus, die im
sich mit grundlegenden Fragestellungen aus dem Bereich beschäf- Innenraum zum Einsatz kommen. Die Arbeitsweise der Roboter er-
tigt und die Wertschöpfungskette mit Wissenstransfer aus der For- streckt sich von vorprogrammiert über interaktiv bis zu autonom.
schung hin zur Industrie unterstützt. Dieses Verständnis äußert sich Die bei Profactor im Fokus stehenden Assistenzsysteme sind
auch in der großen Bandbreite der an der TU Graz durchgeführten Kombinationen aus mobilen Plattformen und Roboterarmen, die im
Forschungsprojekte, die von interessanten grundlegenden Projekten industriellen Umgebungen eingesetzt werden und entweder vorpro-
bis hin zu angewandten Projekten mit Industriebeteiligung reichen. grammiert, kooperativ oder autonom betrieben werden.
Durch die Fokussierung auf grundlegende Fragestellungen aus der
Wahrnehmung, dem Lernen und dem Schlussfolgern sind die For-
3.3 Robot Abilities
schungsergebnisse prinzipiell für alle Marktdomänen anwendbar. Je-
Mensch/Roboter-Interaktion und eine einfach zu konfigurierende,
doch ergeben sich stets Marktdomänen, wie zum Beispiel Such- und
wenn nicht sogar autonome Aufgabendurchführung durch den Ro-
Rettungsroboter, die detaillierter bearbeitet werden.
boter, stellen eine Voraussetzung für kollaborative Robotik und in-
Im Fokus von Profactor stehen Roboterassistenzsysteme für den
novative Produktionsprozesse (Stichwort Losgröße 1) dar. Aus die-
industriellen Einsatz wie etwa die Produktion. Das Ziel ist jedoch,
sem Grund arbeiten die Institute ROBOTICS und DIGITAL von Jo-
dass die Assistenzsysteme nicht nur für eine bestimmte Aufgabe ent-
anneum Research an innovativen, multimodalen Human/Machine
wickelt werden, sondern dass sie frei konfigurierbar sind und intuitiv
Interfaces und Roboter-Aufgabenprogrammierung auf Basis innova-
an neuen Aufgaben angepasst werden können.
tiver, modellbasierter Methoden für die Automatisierung von Robo-
tern. Auch die physikalische Konfiguration, d. h. die Struktur des
3.2 Robot Categories
Roboters, kann für diese Themenstellungen als variabel angesehen
Ein Schwerpunkt der Forschungsarbeiten bei Joanneum Research
werden und ermöglicht eine auf die Aufgabenstellung zugeschnit-
ist die Themenstellung der kollaborativen Robotik in innovativen
tene Robotik-Lösung. Am Institut ROBOTICS werden daher grund-
Logistik- und Produktionsprozessen. Zur Anwendung kommen hier
lagenorientierte Forschungsarbeiten zum Thema rekonfigurierbare
überwiegend serielle Manipulatoren, d. h. Leichtbau-Roboter und
Roboter durchgeführt, die es erlauben, Aufgaben- und Domänen-
industrielle Roboter mit dedizierter sicherheitsbezogener Automati-
spezifische Lösungen mit flexibel gestaltbaren Manipulatoren und
sierung für eine gemeinsame Arbeitsdurchführung von Mensch und
mobilen Robotern für Forschungspartner und Anwendungsfelder
Roboter in einem gemeinsamen, nicht durch Schutzvorrichtungen
anzubieten. Das Thema Sensorik spielt hierbei sowohl in der Dimen-
physikalisch getrennten Arbeitsraum. Mobile Robotik spielt hierbei
sion der Sensor-Technologie an sich als auch in puncto Datenfusion
als Plattform für flexibel platzierbare Manipulatoren und gegebe-
nenfalls auch als Transportplattform eine wichtige Rolle. Weitere und Perzeption einen wesentlichen Schwerpunkt der Arbeiten an
Anwendungen von Sensorik und IKT-Kernkompetenzen, wie z. B. den Instituten MATERIALS und DIGITAL.
3D Machine Vision am Institut DIGITAL, ergänzen das Anwendungs- Der zunehmende Druck zur Verringerung der Zykluszeiten steht
portfolio durch Einbindung in internationalen Projekten, wie z. B. der Tendenz zur energieeffizienten und ressourcenschonenden Pro-
die ESA ExoMars Mission. duktion gegenüber. Letztere führt zu Industrierobotern und Hand-
Das Thema Kollaboration spielt für eine Vielzahl der am Institut habungsgeräten mit deutlich geringerem Gewicht, aber auch mit
für Robotik der Universität Linz bearbeiteten Forschungsprojekte deutlich höherer mechanischer Elastizität. Eine Erhöhung der Ver-
eine wichtige Rolle. Konkrete Ausprägungen der Kollaboration sind fahrgeschwindigkeiten bei gleichzeitiger Gewichtsreduktion ist da-
die kooperative Manipulation von Objekten durch mehrere Roboter her nur mit modellbasierten Regelungskonzepten möglich. Solche
als auch die Mensch-Maschine-Interaktion (MMI) mit den damit ein- Konzepte werden am ROBIN entwickelt und bis zur Anwendungs-
hergehenden Sicherheitsaspekten – beides Themen von großer ak- reife gebracht. Im Zusammenhang mit der Kollaboration nimmt die
tueller Relevanz. Zum Einsatz kommen nichtredundante und redun- Regelung der Interaktionskräfte, mit denen ein Roboter auf seine
dante Industrieroboter mit serieller Kinematik, robotische Manipula- Umgebung einwirkt, großen Raum ein. Von besonderer Bedeutung
toren mit Parallelkinematik und mobile Plattformen mit zusätzlichem ist hierbei eine möglichst niedrige Latenz im Kraftregelkreis. Derar-
Roboterarm, aber auch maßgeschneiderte Spezialsysteme. Von be- tige Konzepte für die Hochgeschwindigkeitskraftregelung sind Ge-
sonderem Interesse für die Universität Innsbruck sind Robotersys- genstand aktueller Forschung an der Johannes Kepler Universi-
teme, die in – für Menschen gemachten – Umgebungen operieren tät. Mobile Roboter stellen eine Antwort auf die Notwendigkeit zur
können und Interaktion mit dem Menschen erlauben. Das Interesse Flexibilisierung des Produktionsprozesses dar. Auch wenn die prinzi-
der Alpen-Adria-Universität Klagenfurt liegt in Teams von Flug- piellen Steuer- und Regelkonzepte hinreichend bekannt und erprobt
und Bodenrobotern, die neben dem Innenbereich auch im Außen- sind, sind die Bahnplanung und die robuste Regelung noch immer
bereich eingesetzt werden können. Hier stehen besonders Mikro- Gegenstand intensiver Forschung. Am Institut für Robotik werden
drohnen (Quad- und Octocopter wie beispielsweise AscTec Pelican, insbesondere Probleme, die aus der Existenz von Singularitäten her-
AscTec Firefly und Microdrones) im Fokus. rühren, behandelt und entsprechend robuste Regelstrategien entwi-
Die grundlagenorientierte Forschung der Technischen Universi- ckelt.
tät Graz ist für eine Vielzahl von Roboterkategorien mit verschiede- Die Universität Innsbruck arbeitet an Methoden der visuellen
nen Umgebungen, Formen, Arbeitsweisen und Funktionen anwend- Wahrnehmung mittels Kameras und Tiefensensoren, um Objekte zu
heft 0.0000 © Springer Verlag Wien e&i elektrotechnik und informationstechnikM. Hofbaur et al. Making Better Robots – Beiträge Österreichs BERICHT
erkennen und deren Lage zu bestimmen [11]. Maschinelle Lernme- Für Profactor sollen Assistenzsysteme generell für verschieden
thoden ermöglichen dem Roboter, das Greifen und die Manipula- Aufgaben eingesetzt werden können. Zusätzlich sollten diese ad-
tion von Objekten zu lernen und zu verbessern, unterstützt durch aptiv sein in Bezug auf Änderungen ihrer Arbeitsumgebung. As-
visuelle und taktile Sensorik [12, 13]. Über die unmittelbare Inter- sistenzsysteme arbeiten mit Menschen in dynamischen Umgebun-
aktion hinaus werden Lernmethoden entwickelt, die dem Roboter gen zusammen, wo z. B. Gegenstände nicht fix positioniert sind.
das Verständnis zunehmend komplexer Fertigkeiten, Konzepte und Intuitive Interaktion zwischen Mensch und Roboter muss realisiert
Zusammenhänge ermöglicht [14, 15]. werden, weil sonst die Akzeptanz solcher Systeme nicht gewähr-
Forschungsarbeiten der Alpen-Adria-Universität Klagenfurt, leistet werden kann. Optimale Interaktionsmodalitäten wurden be-
die zur Verbesserung der Fähigkeiten von Robotern beitragen, um- reits in mehreren Forschungsprojekten bei Profactor entwickelt. Um
fassen die Entwicklung von Konzepten und Software für Multi- richtig und sicher mit Menschen zu interagieren, muss ein Assis-
Robotersysteme [16], adaptiven Datentransfer und zuverlässige tenzsystem die Fähigkeit haben, um seine Umgebungen wahrzu-
Netzwerke [17, 24], Planung, Koordination und Selbstorganisation nehmen. Profactor hat jahrelange Erfahrung im Bereich industriel-
in Multi-Robotersystemen [18–20] sowie Sensordatenauswertung le 3D-Bildverarbeitung (3D-Objekterkennung und -Rekonstruktion)
und Bildverarbeitung [22, 23, 25]. Die konkreten Forschungsschwer- und ermöglicht damit Systemen, ihre Umgebungen zu interpretie-
punkte liegen in der experimentellen Untersuchung von Architektu- ren. Assistenzsysteme müssen nicht nur die Umgebung interpretie-
ren und Protokollen (802.11a, n, ac) für zuverlässige Kommunika- ren, sondern auch die Aktivitäten von den kooperierenden Men-
tion, im Entwurf und der Analyse von zentralisierten und verteil- schen, um intuitive Zusammenarbeit zu garantieren. Dies beinhaltet
ten Algorithmen zur Planung und Koordination von Drohnen sowie unter anderem, dass der Roboter entscheidet welche Aktionen ge-
in der adaptiven Übertragung von multimedialen Daten und der macht werden, um die Interaktion mit dem Menschen zu realisieren.
Software-Integration unter dem Robot Operating System ROS. Der Roboter braucht dazu kognitive Fähigkeiten.
Die Dimension der Roboterfähigkeiten ist jedoch für die Techni-
sche Universität Graz besonders interessant, da alle beteiligten In- 4. Robotik-Forschungsprojekte in Österreich
stitute daran arbeiten, die Fähigkeiten der Roboter zu verbessern. Die österreichischen Forschungsinstitutionen sind an einer Vielzahl
Insbesondere die Themen Konfigurierbarkeit und Adaptabilität so-
von Forschungsprojekten im Bereich Robotik beteiligt. Die Band-
wie die Wahrnehmung als auch die Zuverlässigkeit und Kognition
breite der Projekt reichen von rein grundlagenorientierter Forschung
werden bearbeitet. Der Fokus des Institutes für Maschinelles Sehen
über angewandte Forschung bis bin zu Arbeiten, die bereits nahe
und Darstellen liegt auf der Wahrnehmungsfähigkeit und dabei auf
am Produkt sind. Die Projekte sind lokal, national oder international
visueller Sensorik und hier im Speziellen durch Kameras und 3D-
ausgerichtet und werden von lokalen Institutionen, nationalen För-
Sensorik (Time of Flight, Structured Light etc.). Die Forschung kon-
dergebern wie dem FWF und der FFG, lokal und national von Indus-
zentriert sich auf den Bereich der 3D-Rekonstruktion [26, 27] aus
triepartnern oder der Europäischen Kommission gefördert. Im An-
Bildern sowie Objektdetektion und -erkennung [28], aber auch Be-
schluss finden sie eine Aufstellung von Projekten die, die Bandbreite
reiche wie autonomes Lokalisieren und Navigieren (z. B. SLAM) [29]
und Qualität der österreichischen Robotikforschung dokumentiert.
werden abgedeckt. Digitale Bildsensoren und Algorithmen der Com-
puter Vision finden fundamentale Anwendungen in der Robotik.
4.1 Joanneum Research Forschungsgesellschaft mbH
Die Flexibilität und Robustheit autonomer Systeme und insbeson-
Eine direkte Roboter-Mensch-Interaktion eröffnet viele über die tra-
dere deren Entscheidungsfindung und Aktionsausführung stehen im
ditionelle Anwendung von Robotern hinausgehende Möglichkeiten,
Fokus des Institutes für Softwaretechnologie. Um Flexibilität und Au-
da einerseits die kognitive Fähigkeit des Menschen als auch anderer-
tonomie von Roboter-Systeme zu ermöglichen, beschäftigt sich das
seits die Stärken der Robotertechnologie in puncto Präzision, Leis-
Institut mit deklarativer Programmierung, Planen, Wissensrepräsen-
tation und automatischem Schließen [30, 31]. Um die Robustheit tungsfähigkeit etc. synergetisch genutzt werden können. Es wird er-
autonomer Systeme zu erhöhen, forscht das Institut an Methoden, wartet, dass dieser aus der Servicerobotik-Forschung bekannte An-
die sowohl während der Designphase als auch in der Implementati- satz in naher Zukunft auch für klassische Handhabungsroboter dras-
onsphase sowie auch zur Laufzeit eingesetzt werden können. Dazu tisch an Bedeutung gewinnen wird. Im Forschungsprojekt CollRob
zählt Requirement Engineering, systematisches Testen sowie auto- wird eine umfassende sensorische Umgebungswahrnehmung des
matische Diagnose und Reparatur. Testen, Diagnose und Reparatur Roboters und eine wechselseitige, sowohl für Mensch als auch Ro-
erfolgt auf den Ebenen der Hardware, Software [32], Entscheidungs- boter verständliche Interaktion in der Aufgabenplanung und Durch-
findung [33] und dem gesamten Robotersystem [34]. führung erforscht. Die Thematik Sicherheit, insbesondere auch die
Die Technische Universität Wien entwickelt Methoden zur funktionale Sicherheit des Systems aus Sensorik und Datenverar-
Wahrnehmung von Strukturen und Objekten, so dass Roboter han- beitung, spielt hierbei eine wesentliche Rolle. Als zentrale Aspekte
deln und daraus lernen können. Die Lösungen entwickeln den An- einer Mensch-Roboter-Kollaboration werden im Projektkontext so-
satz des situierten Sehens: Wahrnehmung wird an das Wissen von wohl regelungstechnische Themen, wie eine inhärent sichere Nach-
der Aufgabe, der Domäne und des Roboters gebunden (siehe auch giebigkeitsregelung des Roboters, als auch die Planung einer koope-
Beitrag in 4.6). Die Kompetenz des Institutes ist die sichere Naviga- rativen Handhabungsaufgabe und deren, in der Roboter-Mensch-
tion, 2D- und 3D- Aufmerksamkeitsmethoden sowie und eine kom- Interaktion dynamisch angepassten, Ausführung erforscht.
plette Erfassung von Objekten für Aufgaben mit Robotern. So kön- Im Projekt Stereo Machine Vision für ExoMars entwickeln und
nen Objekte von allen Seiten modelliert und ein vollständiges Ob- liefern die Experten/innen der Forschungsgruppe Bildanalyse und
jektmodell erstellt werden. Dieses Modell dient dazu, spezifische Ob- Messsysteme wesentliche Bestandteile für Robotik-Anwendungen,
jekte zu erkennen. Dies kann erweitert werden auf das Lernen von mit einem Schwerpunkt auf 3D-Bildverarbeitung und Rekonstrukti-
Modellen aus dem Web, um Objektklassen zu erkennen. Alle diese on. Die dreidimensionale Rekonstruktion von Landschaften und Ob-
Modelle liefern den Ausgangspunkt für Affordanz-basiertes Greifen jekten mittels Kameras und Laserscannern hat in den letzten Jahren
– also eine autonome Erkennung von möglichen Greifpunkten, die in vielen Anwendungen ihren Einzug gehalten. Die Technologie ist
auch verschiedene Arten einer Nutzung von Objektfunktionen für sowohl für die Weltraum-Robotik von Bedeutung, wenn unbemann-
die Manipulation einschließt. te Raumsonden und Roboterfahrzeuge die Oberfläche von Planeten
0 0000 0. Jahrgang © Springer Verlag Wien heft 0.0000BERICHT M. Hofbaur et al. Making Better Robots – Beiträge Österreichs
und des Mondes erkunden, als auch in der Kartierung von kom-
merziell und sicherheitstechnisch relevanten Oberflächen auf der Er-
de. Die in der Forschungsgruppe entwickelten und integrierten Ver-
fahren sind für diese Anwendungsgebiete gleichermaßen geeignet.
Mittels Stereo-Rekonstruktion von Bildern des 2018 geplanten Exo-
Mars Rovers der europäischen Weltraumagentur ESA soll die Suche
nach Leben auf unserem Nachbarplaneten unterstützt werden, zu-
dem dienen am Institut entwickelte Navigationsmechanismen dazu,
die Planung der täglichen Rover-Trajektorie zu unterstützen.
4.2 Johannes Kepler Universität Linz
Grundlage für jede modellbasierte Steuerung und Regelung ist ein
Modell. Die Regelgüte hängt folglich von der Qualität des Modells,
Abb. 1. Beispiel für eine Multi-Drohnen-Netzwerkarchitektur
d. h. insbesondere der Modellparameter ab. Methoden für die Iden-
tifikation der Parameter von nichtredundanten Robotern sind hin-
länglich bekannt. Für redundante Roboter war dieses Problem bis- derer ein Roboterarm die Rolle einer dritten, halbautonomen Hand
her nicht erschöpfend behandelt. Als Lösung wurde im Projekt Pa- für kollaborative Fabrikation übernehmen kann. Die IIS-Gruppe trägt
rameteridentifikation redundanter Roboter ein Verfahren zur Para- hierzu Methoden der visuellen Wahrnehmung bei, sowohl von Ob-
meteridentifikation für redundante Roboter entwickelt [1]. Damit ist jekten als auch für die Mensch-Roboter-Interaktion. Das PaCMan-
ein wichtiger Schritt für den Einsatz redundanter Manipulatoren ge- Projekt (2013–2016) entwickelt hierarchische, multimodale Objek-
macht. trepräsentationen für die Wahrnehmung von und Interaktion mit
Die Anwendung klassischer Regelungsstrategien auf flexible Objekten. Diese Repräsentationen ermöglichen beispielsweise die
(Leichtbau-)Roboter führt zu großen Positionierfehlern, insbeson- Planung von Exploration und Manipulation, die Generalisierung zu
dere dann, wenn es sich um Bewegungen mit großen Geschwindig- neuen Objekten über gemeinsame Eigenschaften etc. IIS spielt eine
keiten handelt. Dieses Problem wurde im Rahmen mehrerer Projekte zentrale Rolle in der probabilistischen Zusammenführung visueller,
angegangen und eine allgemeingültige Methode für die modellba- taktiler und anderer Sensorinformationen in hierarchischen Model-
sierte Regelung entwickelt [2, 3]. Für verschiedene Manipulatoren len. Das Ziel des SQUIRREL-Projekts (2014–2018) ist ein Spielzeugro-
wurde auf Grundlage detaillierter dynamischer Modelle jeweils ein boter, der gemeinsam mit seinem Besitzer das Kinderzimmer auf-
Minimalmodell abgeleitet, das als Basis für die Regelung dient. Das räumt. Forschungsziele umfassen die Lokalisierung und Navigation,
modellbasierte Regelkonzept wurde auf einer Industriesteuerungs- das Erkennen und die Klassifikation von Objekten, die Entwicklung
einheit der Firma Bernecker & Rainer implementiert. Die Methode von Hardware und die Mensch-Roboter-Interaktion. Die IIS-Gruppe
ermöglicht beispielsweise, eine Positionieraufgabe mit einem elasti- untersucht Methoden des Greifens und der Wegsortierung bekann-
schen Roboter durchzuführen, wobei nur 10 % des Energiebedarfs ter und unbekannter Objekte. Das Xperience-Projekt (2011–2015)
eines Standardindustrieroboters benötigt werden. Die zeitoptimale hat Lernmethoden zum Ziel, die es Robotern ermöglichen, kom-
Bahnplanung ist natürlich auf Standardindustrieroboter anwendbar. plexe Fertigkeiten und Zusammenhänge unter Nutzung von bereits
Dabei werden sowohl Begrenzungen der Motormomente, der Be- Gelerntem zu erlernen. IIS ist nicht nur an der visuellen Wahrneh-
schleunigungen und Rücke, also auch Hindernisse, berücksichtigt. mung beteiligt, sondern spielt eine zentrale Rolle im Erlernen von
Für die Interaktion mit der Umgebung und aus Sicherheitsaspek- Analogien und hat gezeigt, wie Roboter sensomotorische Interak-
ten ist die Regelung der Kraft, die ein Roboter auf seine Umgebung tionen selbstständig nach Schwierigkeit sortiert lernen können, wo-
ausübt, notwendig. Es wurde ein adaptiv lernendes Verfahren ent- bei einfachere Fertigkeiten gegebenenfalls komplexeren behilflich
wickelt, welches sicherstellt, dass eine vorgegebene Kraft oder ein sind, um anschließend komplexe, zielgerichtete Interaktionssequen-
Kraftprofil erzeugt wird [4]. Der adaptive Charakter des Verfahrens zen planen und durchführen können.
sichert eine Robustheit der Methode.
4.4 Alpen-Adria-Universität Klagenfurt
4.3 Universität Innsbruck Das über die Lakeside Labs vom KWF geförderte Forschungsprojekt
Der Arbeitsbereich Geometrie und CAD leitet bzw. leitete eine Viel- Self-organizing Intelligent Network of UAVs (SINUS) untersucht Ent-
zahl durch den FWF geförderter Grundlagenprojekte. Darunter sind wurfsmethoden für Multi-Robotersysteme am Beispiel von batterie-
Kinematic Analysis of Lower-Mobility Parallel Manipulators Using Ef- getriebenen Flugrobotern (Mikrodrohnen). Mikrodrohnen-Systeme
ficient Algebraic Tools, FWF grant I 1750-N26, Algebraic Methods können prinzipiell in vier Hauptkomponenten aufgeteilt werden:
in Kinematics: Motion Factorisation and Bond Theory, FWF grant (i) die Drohnen-Plattform, (ii) die Datenerfassung und -auswertung,
P 26607, und Algebraic Methods in Collision Detection and Path (iii) die drahtlose Datenübertragung zwischen Drohnen und Boden-
Planning, FWF grant P 23832-N13. Daneben gibt es Projekte im station und (iv) die Koordinierung der einzelnen Drohnen-Aufgaben
WTZ–Programm (Wissenschaftlich Technische Zusammenarbeit) mit (vgl. Abb. 1). Das wesentliche Ziel von SINUS ist die Abstraktion
Rumänien (Untersuchungen von parallelen Manipulatoren für den und Interaktion dieser vier Komponenten, um sensing–networking–
chirurgischen Einsatz (Brachytherapie) und Frankreich (Algebraische acting einfach zu integrieren und für verschiedene Anwendungen
Methoden zur Untersuchung niedrigdimensionaler paralleler Mani- realisieren zu können.
pulatoren). Ein weiteres über die Lakeside Labs vom KWF gefördertes Pro-
Die Arbeitsgruppe für Intelligente und Interaktive Systeme (IIS) jekt verfolgte das Ziel, Sensordaten mit Hilfe von kooperierenden
ist derzeit in vier EU-FP7-Projekten aktiv, die sich mit verschiede- und vernetzten Mikrodrohnen zu erfassen und zu interpretieren so-
nen Aspekten der autonomen Robotik befassen. Alle erweitern die wie diese abstrahierten Daten in geeigneter Form Einsatzkräften zur
Grenzen der Autonomie an verschiedenen Fronten. Das Projekt 3rd Verfügung zu stellen. Dazu formieren sich die Mikrodrohnen selbst-
Hand (2013–2017) entwickelt maschinelle Lernmethoden, mittels organisierend, überfliegen das Einsatzgebiet und übermitteln die er-
heft 0.0000 © Springer Verlag Wien e&i elektrotechnik und informationstechnikSie können auch lesen