Optische Messung zahnindividueller Formparameter am Beispiel von Geradverzahnungen
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
tm – Technisches Messen 2021; 88(S1): S53–S58 Marc Pillarz*, Axel von Freyberg, Dirk Stöbener und Andreas Fischer Optische Messung zahnindividueller Formparameter am Beispiel von Geradverzahnungen Optical measurement of tooth-individual shape parameters of spur gears DOI 10.1515/teme-2021-0068 measuring systems are precise, but due to their limited speed and measuring volume, they are only suitable to Zusammenfassung: Der Bedarf an skalierbaren Messsys- a limited extent for comprehensive quality inspection of temen für die umfassende Qualitätsprüfung zahnindividu- all teeth. For this reason, a faster optical multi-distance eller Formparameter metergroßer Zahnräder mit einstel- measurement approach with model-based evaluation is liger Unsicherheit im Mikrometerbereich wächst. Taktile being investigated for gear measurement. Going beyond Standardverzahnungsmesssysteme sind präzise, aber auf- previous work, where the mean base circle radius was grund der limitierten Geschwindigkeit und des begrenzten determined as the fundamental shape parameter of all Messvolumens für eine umfassende Qualitätsprüfung al- teeth, the suitability of the measurement approach for ler Zähne nur bedingt geeignet. Aus diesem Grund wird inspecting tooth-individual shape parameters is investi- ein schnellerer optischer Multi-Distanz-Messansatz mit gated here. Measurements on small gears show that the modellbasierter Auswertung zur Verzahnungsmessung un- tooth-individual base circle radius can be determined on tersucht. Über bisherige Arbeiten hinausgehend, in denen average with an uncertainty < 10 µm ( = 2), which zunächst der mittlere Grundkreisradius als grundlegen- provides a promising basis for the future application of der Formparameter von allen Zähnen bestimmt wurde, the multi-distance measurement approach on large gears. wird hier die Eignung des Messansatzes zur Erfassung zahnindividueller Formparameter untersucht. Messungen Keywords: optical gear measurement, multi-distance mea- an kleinen Verzahnungen zeigen, dass der zahnindividu- surements, model-based evaluation, confocal chromatic elle Grundkreisradius im Mittel mit einer Unsicherheit sensor, measurement uncertainty. < 10 µm ( = 2) bestimmt werden kann, was eine vielver- sprechende Grundlage für die zukünftige Anwendung des Multi-Distanz-Messansatzes bei Großverzahnungen bietet. 1 Einleitung Schlüsselwörter: optische Verzahnungsmessung, Multi- 1.1 Motivation Distanz-Messungen, modellbasierte Auswertung, konfokal- chromatischer Sensor, Messunsicherheit. Für eine gleichmäßige Kraftübertragung in Getrieben ist Abstract: The need for scalable measuring systems for die Zahnflankenform entscheidend. Der Grundkreisradius comprehensive quality inspection of tooth-specific form pa- einer Stirnverzahnung mit Evolventenprofil ist der formge- rameters of meter-sized gears with single-digit uncertainty bende Parameter für die Geometrie der Zahnflanke. Übli- in the micrometer range is growing. Tactile standard gear cherweise wird anstelle des Grundkreisradius die Profilwin- kelabweichung zur Bewertung der Zahnflanke ausgewertet, jedoch sind bei Stirnverzahnungen beide Größen inein- *Korrespondenzautor: Marc Pillarz, Universität Bremen, Bremer ander umrechenbar. Abweichungen des Grundkreisradius Institut für Messtechnik, Automatisierung und Qualitätswissenschaft (BIMAQ), E-Mail: m.pillarz@bimaq.de von der Nenngeometrie führen zu einem ungleichmäßigen Axel von Freyberg, Universität Bremen, Bremer Institut für Übertragungsverhalten und vorzeitigem Verschleiß der Ver- Messtechnik, Automatisierung und Qualitätswissenschaft zahnungen. Die Herstellung von Verzahnungen ist daher (BIMAQ), E-Mail: a.freyberg@bimaq.de mit engen Toleranzen im Mikrometerbereich verbunden Dirk Stöbener, Andreas Fischer, Universität Bremen, Bremer [4]. Abgeleitet aus [4] werden je nach Verzahnungsqualität Institut für Messtechnik, Automatisierung und Qualitätswis- Grundkreisradiusabweichungen im niedrigen zweistelligen senschaft (BIMAQ), Universität Bremen, MAPEX Center for Materials and Process, E-Mail: d.stoebener@bimaq.de, andre- Mikrometerbereich toleriert. Um die Zuverlässigkeit von as.fischer@bimaq.de
S54 M. Pillarz et al., Optische Messung zahnindividueller Formparameter von Verzahnungen Getrieben zu steigern, muss daher der Grundkreisradi- den jedoch nicht erwähnt. In [11] stellen Pillarz et al. us mindestens mit einer Messunsicherheit im einstelligen einen skalierbaren Multi-Distanz-Messansatz zur schnel- Mikrometerbereich (< 10 µm) erfasst werden. len Prüfung von Großverzahnungen vor, der auf einen Bei Großverzahnungen müssen zudem die Daten aller konfokal-chromatischen Abstandssensor in Kombination Zähne erfasst und individuell bewertet werden, da die mit einem Drehtisch basiert. Die optisch gemessene Punkt- Herstellung von Großverzahnungen in der Regel auf dis- wolke wird hierbei zur Auswertung an ein parametrisches kontinuierlichen Verfahren basiert. Darüber hinaus stellen Geometriemodell der Verzahnung approximiert. Mit dem geometrische Messungen an Großverzahnungen wegen der Multi-Distanz-Messansatz lässt sich der mittlere Grund- metergroßen Abmessungen und Massen größer 500 kg ei- kreisradius von allen Zähnen mit einer Unsicherheit von ne zusätzliche logistische Herausforderung dar. Deshalb < 10 µm ( = 2) bestimmen. Das grundsätzliche Potential sind zur Großverzahnungsmessung Messsysteme mit einem dieses Messansatzes zur Erfassung zahnindividueller Form- flexiblen und variablen Messvolumen erforderlich. Zusam- parameter wird im Ausblick erwähnt, eine Untersuchung menfassend bedarf es skalierbarer Verzahnungsmesssys- zur erreichbaren Messunsicherheit ist jedoch ausstehend. teme, die die Daten aller Zähne erfassen, um zahnindi- viduelle Formparameter wie den Grundkreisradius von Verzahnungen mit einer Unsicherheit im einstelligen Mi- 1.3 Ziel und Struktur des Artikels krometerbereich zu quantifizieren. In diesem Artikel wird daher der skalierbare Multi-Distanz- Messansatz zur Verzahnungsmessung für die Erfassung 1.2 Stand der Technik zahnindividueller Formparameter mit einer Unsicherheit < 10 µm ( = 2) am Beispiel des Grundkreisradius un- Standardmesssysteme für Verzahnungen, wie taktile Ko- tersucht. Dafür wird die modellbasierte Auswertung der ordinatenmessgeräte (KMG) und Verzahnungsmessgeräte Messpunkte um eine weitere Approximationsstufe ergänzt. [1, 5, 10], sind präzise, aber hinsichtlich der Geschwin- Das entsprechend erweiterte Messkonzept wird durch den digkeit und des Messvolumens limitiert. Aufgrund der Einsatz eines konfokal-chromatischen Sensors in Kombi- limitierten Geschwindigkeit werden in Standardverzah- nation mit einem Drehtisch realisiert, um kontinuierli- nungsprüfungen typischerweise nur vier über den Umfang che Abstandsmessungen zu allen Zahnflanken, zunächst des Zahnrads verteilte Zähne gemessen [1]. Dieser stich- an kleinen Verzahnungen, durchzuführen. Der Messan- probenartige Prüfumfang erlaubt jedoch keine zuverläs- satz wird in Abschnitt 2 beschrieben. Abschnitt 3 erläu- sige Qualitätsprüfung aller Zähne, weshalb die taktilen tert den experimentellen Aufbau zu den Multi-Distanz- Standardmesssysteme nur bedingt für umfangreiche Groß- Verzahnungsmessungen. Die Messergebnisse werden an- verzahnungsmessungen geeignet sind. schließend in Abschnitt 4 veranschaulicht und mit taktilen In jüngster Zeit werden daher schnellere optische Ver- Referenzmessungen basierend auf einer Standardverzah- zahnungsmesskonzepte untersucht, deren Potential zu- nungsauswertung validiert. Der Artikel schließt mit einer nächst am Beispiel kleiner Verzahnungen aufgezeigt wird. Zusammenfassung in Abschnitt 5. Chen et al. detektieren die 3D-Topologie der Zahnflanken eines Stirnrads mittels Moiré-Projektion und ermitteln zahnindividuelle Formparameter wie beispielsweise die Profilwinkelabweichung [2]. Dabei wird eine Messunsicher- 2 Messprinzip heit < 5 µm (ein Erweiterungsfaktor ist nicht angegeben) erreicht. Die erzielten Messergebnisse zeigen ein großes 2.1 Messgröße Grundkreisradius Potenzial für Verzahnungsmessungen, eine Anwendung für Großverzahnungen bzw. die Skalierbarkeit des Ansatzes Zur umfangreichen und aussagekräftigen Qualitätsbeurtei- wird jedoch nicht diskutiert. Ein weiterer optischer Ver- lung von Verzahnungen sind zahnindividuelle Formpara- zahnungsmessansatz wird in [8] beschrieben und basiert meter zu bewerten. Der Grundkreisradius ist der formge- auf Messungen mit einem Laserlinien-Triangulationssensor bende Parameter für die Geometrie der Zahnflanken und in Kombination mit einem Drehtisch. Guo et al. zeigen, wird in diesem Artikel als grundlegender Formparameter dass die Gesamtprofilabweichung der individuellen Zahn- betrachtet. Typischerweise wird bei der Standardverzah- flanken mit einer Unsicherheit von < 5 µm (ein Erweite- nungsmessung die Profilwinkelabweichung zur Bewertung rungsfaktor ist nicht angegeben) gemessen werden kann der Zahnflanke herangezogen und nicht der Grundkreisra- [8]. Skalierbare Messungen von Großverzahnungen wer- dius. Der Ist-Grundkreisradius korreliert jedoch mit der
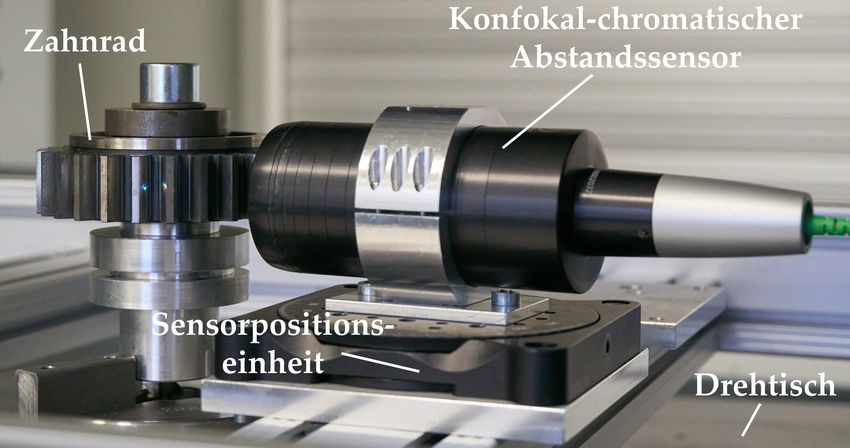
M. Pillarz et al., Optische Messung zahnindividueller Formparameter von Verzahnungen S55 Profilwinkelabweichung und kann gemäß der Beziehung von [13]. Durch Minimierung der Summe der quadrierten H Lotabstände zu den gemessenen Punkten b = b,n · + b,n (1) (︃ ∑︁ )︃ 2 aus dem Nenngrundkreisradius b,n , der Profilwinkelabwei- min plu,i (3) i , 0 , t , t , b =1 chung H und dem Auswertebereich berechnet werden. Die Profilwinkelabweichung definiert die Abweichung der wird nach der Methode der kleinsten Quadrate eine ideale tatsächlichen Winkellage im Vergleich zur Soll-Winkellage Evolvente in Abhängigkeit von den Parametern ( i , 0 , der Zahnflanke [9]. Zur Abschätzung der erreichbaren t , t , b ), d.h. einschließlich des gesuchten mittleren Messunsicherheit bei der Messung zahnindividueller Grun- Grundkreisradius b berechnet. kreisradien mittels des Multi-Distanz-Messansatzes wird Die Approximation einer Evolvente zur Berechnung aus taktil gemessenen, klassisch ausgewerteten Profilwin- des Grundkreisradius ist ein komplexes nichtlineares kelabweichungen und durch Anwendung von Gleichung (1) Minimierungsproblem mit einem multidimensionalen ein Referenzwert für den Grundkreisradius ermittelt. Lösungsraum. Bei der zahnindividuellen Grundkreisra- diusapproximation erhöhen die Randbedingungen einer unvollständigen Erfassung der Evolvente und insbeson- 2.2 Modellbasierte Auswertung des dere die lokale Häufung der Messpunkte zusätzlich die Grundkreisradius Wahrscheinlichkeit, nicht das globale Minimum zu finden. Systematische Abweichungen in der Grundkreisradi- In [11, 12] stellen Pillarz et al. ein modellbasiertes Auswer- usberechnung sind die Folge. Zur Reduzierung dieser teverfahren zur Berechnung des Formparameters mittleren systematischen Abweichungen wird eine zweistufige Ap- Grundkreisradius auf Basis eines Geometriemodells von proximation durchgeführt, wodurch der Lösungsraum Evolventenverzahnungen nach [6, 7] vor. Ein Punkt i auf schrittweise bestimmt wird. Zunächst werden die frei- einer idealen Zahnflanke en Parameter ( i , 0 , t , t , b ) über alle gemessenen [︂ ]︂ [︂ ]︂ Zähne gemäß Gleichung (3) bestimmt. In einer anschlie- i cos( i + z − b + 0 ) i = = b · ßenden Approximation nach Gleichung (3) werden dann i sin( i + z − b + 0 ) [︂ ]︂ [︂ ]︂ die ermittelten Parameter ( t , t ) gesperrt. Die zweite sin( i + z − b + 0 ) t Approximationsstufe hat somit weniger freie Parameter, + b · i · + (2) − cos( i + z − b + 0 ) t wodurch systematische Abweichungen bei der Approxima- kann durch die Lageparameter ( i : Wälzwinkel, z : Lage tion des zahnindividuellen Grundkreisradius auf Basis der der Mittelachse von Zahn , b : Zahndickenhalbwinkel, Messdaten von nur einer Evolvente verringert werden. 0 : Verdrehung zum Werkstückkoordinatensystem und ( t , t ): Translation zum Werkstückkoordinatensystem und Mittelpunkt der Verzahnung) und dem Formparame- 2.3 Multi-Distanz-Messansatz ter Grundkreisradius b in einem Messkoordinatensystem beschrieben werden. Die Berechnung des Grundkreisra- Um die zahnindividuellen Grundkreisradien zu bestim- dius erfolgt daraufhin mit der Lösung des inversen Pro- men, wird zur Messung der Zahnflankenform ein Multi- blems von Gleichung (2), wobei die fünf ( + 4) Parameter Distanz-Messansatz bestehend aus optischen Abstands- ( i , 0 , t , t , b ) unbekannt sind und mit nur einem sensoren in Kombination mit einem Drehtisch vorgestellt Messpunkt i = ( i , i ) ein unterbestimmtes Gleichungs- (vgl. Abb. 1). Die Sensoren sind über den Umfang verteilt system vorliegt. Um das inverse Problem zu lösen, sind und tangential zum Nenngrundkreis im Stirnschnitt des dementsprechend mindestens vier Messpunkte ( = 1...4) Zahnrads ausgerichtet. erforderlich. Die Sensoren mit einem Sensorkoordinatensystem Die gemessenen Zahnflanken weichen zudem von der ( , ) und der Drehtisch bilden im Drehzentrum das ge- Nenngeometrie ab. Zur Bestimmung des tatsächlichen meinsame Messkoordinatensystem ( r , r ). Das Sensor- Grundkreisradius wird daher ein iterativer Ansatz verwen- system wird mit einem bekannten Zahnrad nach dem det. Eine mittlere ideale Evolvente wird unter Berücksich- Ansatz von [11] kalibriert und justiert, da die genaue tigung der Abweichungen (Lotabstände plu,i ) zwischen Sensorposition und -ausrichtung nicht bekannt sind und den gemessenen Zahnflanken und der idealen Zahnflanke eine unbekannte Sensoranordnung zu einer systematischen in die Messpunkte aller gemessenen Zahnflanken approxi- Messabweichung bei der Berechnung des Grundkreisra- miert. Die Berechnung der Lotabstände erfolgt auf Basis dius führt. Im Gegensatz zur Kalibrierung hinsichtlich
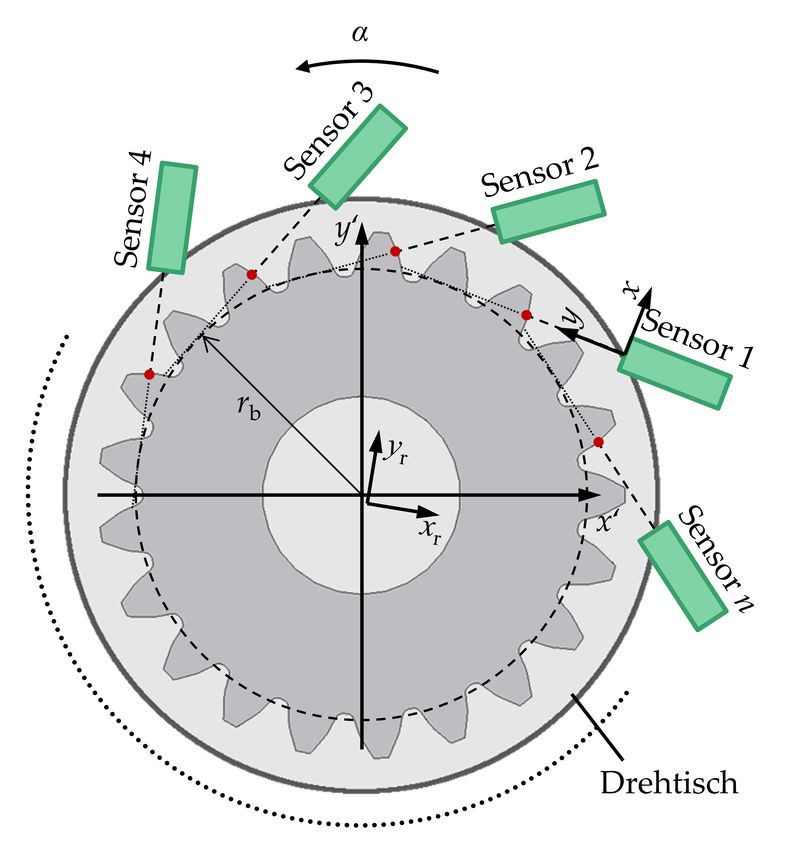
S56 M. Pillarz et al., Optische Messung zahnindividueller Formparameter von Verzahnungen Referenzwerte für die zahnindividuellen Grundkreisradien bestimmt. Zur Kalibrierung des modellbasierten Multi-Distanz- Ansatzes wird ein Kalibrierzahnrad verwendet, welches mittels taktiler Referenzmessungen charakterisiert ist. Da das Kalibrierzahnrad Ähnlichkeitsbedingungen bezüglich des zu messenden Zahnrades erfüllen muss [3], wird ein nicht modifiziertes Stirnrad mit nominell gleicher Geome- trie verwendet. 3.2 Messanordnung In diesem Artikel wird die erreichbare Messunsicherheit für zahnindividuelle Grundkreisradien auf Basis eines Multi- Distanz-Messansatzes bestehend aus einem Sensor ( = 1) Abb. 1: Modellbasierter Multi-Distanz-Ansatz bestehend aus in Kombination mit einem Drehtisch abgeschätzt. Der optischen Abstandssensoren mit einem Sensorkoordinatensystem Messaufbau des Multi-Distanz-Messansatzes ist in Abb. 2 ( , ) in Kombination mit einem Drehtisch in einem gemeinsamen dargestellt. Als Rotationseinheit wird der Drehtisch des Messkoordinatensystem ( r , r ), das kontinuierlich die Zahnform Portal-Koordinatenmessgeräts Leitz PMM-F 30.20.7 einge- eines Stirnrades mit einem Werkstückkoordinatensystem ( ′ , ′ ) setzt, auf dem das Zahnrad durch eine spezielle Spannein- in Abhängigkeit vom Drehwinkel misst. heit positioniert wird. Zur Messung der Form der Zahnflan- ken wird ein konfokal-chromatischer Sensor IFS2405-10 des mittleren Grundkreisradius [13], wird in diesem Arti- von MicroEpsilon eingesetzt. Der Sensor hat einen Mess- kel das Messsystem zahnindividuell kalibriert. Während bereich von 10 mm bei einem Arbeitsabstand von 50 mm das Zahnrad rotiert, werden die Zahnflanken kontinuier- und ist mit einer Abstandsunsicherheit von 2,5 µm spezifi- lich in Form von Distanzen i über die Drehwinkel i ziert ( = 1). Der Messfleck hat auf den Zahnoberflächen gemessen. Die scannende Datenerfassung führt zu einem einen mittleren Durchmesser von 16 µm. Der Sensor wird überbestimmten Gleichungssystem, das die iterative Aus- so positioniert, dass bei der Erfassung der Zahnflanken der wertung des Formparameters Grundkreisradius pro Zahn gesamte Messbereich genutzt wird. Um den Sensor tangen- nach Gleichung (3) ermöglicht. tial zum Nenngrundkreis des Zahnrads auszurichten, wird eine manuelle Dreheinheit verwendet. Durch einen Tau- mel, der aus einer exzentrischen und ggf. leicht schrägen Einspannung des Zahnrades auf dem Drehtisch resultiert, 3 Experimenteller Messaufbau weicht die reale Sensorausrichtung jedoch von der idealen Ausrichtung ab. Die Kalibrierung des Sensorsystems er- 3.1 Messobjekt folgt, indem das Kalibrierzahnrad nahezu konzentrisch auf dem Drehtisch mittels der Spanneinheit montiert wird. Ei- Für die Verzahnungsmessungen wird ein nicht modifizier- ne Herausforderung für den Aufbau ist die reproduzierbare tes Stirnrad verwendet. Das Zahnrad hat 26 Zähne mit Einspannung des Kalibrierzahnrads und des anschließend Evolventenprofil, einen Normalmodul von 3,75 mm und zu messenden Zahnrads. Alle Messungen werden in einem einen Nenngrundkreisradius von 45,8100 mm. klimatisierten Messraum durchgeführt. Die Temperaturän- Zur Abschätzung der erreichbaren Messunsicher- derungen über die Zeit sind kleiner als 0,4 K pro Stunde. heit bei der Erfassung zahnindividueller Formparame- Bei der Multi-Distanz-Messung misst der konfokal- ter mittels dem Multi-Distanz-Messansatz wird eine Re- chromatische Sensor den Abstand zur Zahnradoberfläche ferenzmessung mit einem Leitz PMM-F 30.20.7 Portal- mit einer Messrate von 1 kHz, während das Zahnrad ro- Koordinatenmessgerät durchgeführt. Bei dieser Standard- tiert wird. Wiederholungsmessungen werden immer am verzahnungsmessung werden die Profilwinkelabweichungen gleichen Zahn auf der linken Flankenseite gestartet. Pro aller Zähne mit einer geschätzten Unsicherheit von 1 µm Zahn werden 1350 Messpunkte entsprechend der opti- ( = 1) gemessen, und basierend auf Gleichung (1) die schen Erreichbarkeit erfasst. Aufgrund der Abschattung durch Nachbarzähne wird nur die Hälfte der Evolvente am
M. Pillarz et al., Optische Messung zahnindividueller Formparameter von Verzahnungen S57 Für die Abschätzung der erreichbaren Messunsicher- heit bei der Erfassung zahnindividueller Grundkreisradi- en werden mit dem Multi-Distanz-Messansatz 22 Wie- derholungsmessungen durchgeführt. In Abb. 3 sind die experimentellen Messergebnisse der zahnindividuellen Grundkreisradien veranschaulicht. Die blauen Kreuze sym- bolisieren die mit dem modellbasierten Multi-Distanz- Messansatz bestimmten gemittelten Grundkreisradien für 22 Wiederholungsmessungen pro Zahn, wohingegen die roten Kreise die taktil gemessenen zahnindividuellen Re- Abb. 2: Messaufbau zur modellbasierten Multi-Distanz-Messung ferenzgrundkreisradien darstellen. Darüber hinaus ist die der zahnindividuellen Grundkreisradien eines nicht modifizier- erweiterte Messunsicherheit für = 2 angegeben. ten Evolventenstirnrads mit einem Nenngrundkreisradius von 45,8100 mm. Der Multi-Distanz-Ansatz besteht aus einem konfokal-chromatischen Abstandssensor und einem Drehtisch zur Durchführung von scannenden Messungen der Zahnflankenform. äußeren Ende bis zum Zahnkopf erfasst. Für die modellba- sierte Auswertung der zahnindividuellen Grundkreisradien werden die winkelabhängigen gemessenen Abstände an- schließend in Koordinaten transformiert. 4 Verzahnungsmessungen Abb. 3: Experimentelle Ergebnisse der Erfassung der zahnindivi- duellen Grundkreisradien b an einer kleinen Verzahnung. Dar- gestellt sind die auf Basis des Multi-Distanz-Ansatzes mit einem Aufgrund der unbekannten Sensoranordnung und der dar- optischen Sensor erfassten mittleren Grundkreisradien pro Zahn aus resultierenden systematischen Abweichung bei der für 22 Wiederholungsmessungen (blaue Kreuze) und die auf Basis Grundkreisradiusbestimmung, muss das Multi-Distanz- einer taktilen Standardverzahnungsmessung ermittelten zahnin- Messsystem zunächst kalibriert werden. Dazu wird die dividuellen Referenzgrundkreisradien (rote Kreise). Zusätzlich ist die erweiterte Messunsicherheit für = 2 für die ermittelten Geometrie eines bekannten Kalibrierzahnrades gemes- Grundkreisradien angegeben. sen, welche zuvor mittels taktiler Referenzmessungen und auf Basis von Gleichung (1) bestimmt wurde. Die Unsi- cherheitsabschätzung für die zahnindividuellen Referenz- Die Messergebnisse in Abb. 3 zeigen, dass die mo- grundgkreisradien basiert dabei auf einer Fortpflanzungs- dellbasierten Multi-Distanz-Messungen mit den taktilen rechnung mit der geschätzten Unsicherheit für die Profil- Referenzmessungen im Rahmen der erweiterten Messun- winkelabweichung von 1 µm. Anschließend zu den Multi- sicherheiten übereinstimmen. Signifikante systematische Distanz-Messungen am Kalibrierzahnrad werden die jewei- Messabweichungen sind mit einer hohen statistischen Si- ligen zahnindividuellen Grundkreisradien modellbasiert cherheit nicht sichtbar und werden somit zahnindividuell ausgewertet. Die Kalibrierung des Systems erfolgt dar- kompensiert. Im Mittel beträgt die erweiterte Messunsi- aufhin in Form einer zahnindividuellen Offsetkorrektur, cherheit ( = 2) des zahnindividuellen Grundkreisradius indem die ermittelten Grundkreisradien mit der zahnindi- der Multi-Distanz-Messungen 9,8 µm, womit die Zielset- viduellen Referenzgeometrie verglichen werden. Für jeden zung von einer Messunsicherheit < 10 µm ( = 2) knapp er- Zahn ergibt sich so ein Korrekturwert für den Grundkreis- reicht ist. Die erreichbare Messunsicherheit ergibt sich aus radius, welcher auf folgende Multi-Distanz-Messungen an zufälligen Messabweichungen aus den optischen Distanz- ähnlichen Verzahnungen angewendet werden kann. Die Messungen und der Unsicherheit aus der Kalibrierung des erreichbare Messunsicherheit bei der zahnindividuellen Messsystems. Der Beitrag der zufälligen Messabweichun- Grundkreisradiusbestimmung wird daraufhin an einem gen resultierend aus der optischen Messung errechnet sich weiteren Stirnrad mit vergleichbarer Nenngeometrie quan- aus der Standardabweichung der 22 Wiederholungsmes- tifiziert. Das Zahnrad wird entsprechend der Kalibriermes- sungen pro Zahn zu 4,1 µm ( = 1) und dominiert die sungen auf dem Drehtisch positioniert und eingespannt. erreichbare Messunsicherheit. Durch eine Steigerung der
S58 M. Pillarz et al., Optische Messung zahnindividueller Formparameter von Verzahnungen Messpunktezahl kann der Beitrag der zufälligen Messab- weichungen resultierend aus der optischen Messung und Literatur damit die gesamte erreichbare Messunsicherheit bei der [1] F. Balzer, N. Steffens, M. Stein und K. Kniel. Traceable mea- zahnindividuellen Grundkreisradiusbestimmung mittels surement of large gears with micron accuracy: a mandatory des modellbasierten Multi-Distanz-Messansatzes zukünftig basis for reliable wind energy systems. In Engineering for noch reduziert werden. Daraufhin ist dann die Limitie- a Changing World: Proceedings; 59th IWK, Ilmenau Scien- rung der erreichbaren Messunsicherheit aufgrund der Ka- tific Colloquium, Band 59, Technische Universität Ilmenau, September 11-15, 2017. librierunsicherheit zu berücksichtigen, welche mit 2,7 µm [2] Y.-C. Chen und J.-Y. Chen. Optical inspection system for ( = 1) einen nicht zu vernachlässigenden Beitrag zur gear tooth surfaces using a projection moiré method. Sensors, Messunsicherheit leistet. Zusammenfassend zeigen die Er- 19(6):1450, 2019. 10.3390/s19061450. gebnisse an der kleinen Verzahnung das Potential des mo- [3] DIN EN ISO 15530-3. Geometrical product specifications dellbasierten Multi-Distanz-Messansatzes zur Erfassung (GPS) - Coordinate measuring machines (CMM): Technique for determining the uncertainty of measurement - Part 3: zahnindividueller Formparameter und bieten eine vielver- Use of calibrated workpieces or measurement standards (ISO sprechende Grundlage für die zukünftige Anwendung an 15530-3:2011), Sept. 2018. Großverzahnungen. [4] DIN ISO 1328-1. Cylindrical gears - ISO system of flank tolerance classification - Part 1: Definitions and allowable values of deviations relevant to flanks of gear teeth (ISO 1328-1:2013), Mar. 2018. 5 Zusammenfassung [5] F. Franceschini, M. Galetto, D. Maisano und L. Mastro- giacomo. Large-scale dimensional metrology (lsdm): from In diesem Artikel wird die Eignung eines neuartigen tapes and theodolites to multi-sensor systems. International Journal of Precision Engineering and Manufacturing, 15(8): modellbasierten Multi-Distanz-Messansatzes nach [11] 1739–1758, 2014. 10.1007/s12541-014-0527-2. zur Messung zahnindividueller Formparameter am Bei- [6] G. Goch. Gear metrology. CIRP Annals, 52(2):659 – 695, spiel von Geradverzahnungen mit einer Messunsicherheit 2003. 10.1016/S0007-8506(07)60209-1. < 10 µm ( = 2) vorgestellt. Durch die Kombination [7] A. Günther, J. Peters und G. Goch. Flächenhafte numerische eines optischen konfokal-chromatischen Abstandssensors beschreibung, ausrichtung und auswertung von zylinderrä- mit einem Drehtisch kann die Oberfläche aller Zähne er- dern (3d-surface-like numerical description, alignment, and evaluation of involute cylindrical gears). tm - Technisches fasst und anschließend modellbasiert ausgewertet werden. Messen Plattform für Methoden, Systeme und Anwendungen Zur Reduzierung von Unsicherheiten in der Messanord- der Messtechnik, 68(4/2001):160, 2001. nung wird das Multi-Distanz-Messsystem mittels eines [8] X. Guo, Z. Shi, B. Yu, B. Zhao, K. Li und Y. Sun. 3d Kalibrierzahnrades kalibriert, sodass sich systematische measurement of gears based on a line structured light Messabweichungen bei der Grundkreisradiusberechnung sensor. Precision Engineering, 61:160 – 169, 2020. 10.1016/j.precisioneng.2019.10.013. korrigieren lassen. Die Eignung zur Erfassung zahnindivi- [9] H. Linke, J. Börner und R. Heß. 8 - ensuring the accuracy dueller Formparameter wird zunächst an kleinen Verzah- of cylindrical gears. In H. Linke, J. Börner und R. Heß, nungen veranschaulicht. editors, Cylindrical Gears, S. 554 – 589. Hanser, 2016. ISBN Die experimentellen Untersuchungen zeigen, dass sys- 978-1-56990-489-3. 10.3139/9781569904909.008. tematische Messabweichungen korrigiert werden und die [10] G. N. Peggs, P. G. Maropoulos, E. B. Hughes, A. B. For- bes, S. Robson, M. Ziebart und B. Muralikrishnan. Recent Multi-Distanz-Messungen im Rahmen der erweiterten developments in large-scale dimensional metrology. Pro- Messunsicherheit mit den Referenzmessungen überein- ceedings of the Institution of Mechanical Engineers, Part B: stimmen. Das Ziel, eine Messunsicherheit < 10 µm ( = 2) Journal of Engineering Manufacture, 223(6):571–595, 2009. zu erreichen, ist erfüllt und demonstriert das Potential des 10.1243/09544054JEM1284. Multi-Distanz-Messansatzes zur Erfassung von zahnindivi- [11] M. Pillarz, A. von Freyberg und A. Fischer. Gear shape duellen Formparametern. Die zukünftigen Forschungsakti- parameter measurement using a model-based scanning multi- distance measurement approach. Sensors, 20(14):3910 (16 vitäten konzentrieren sich daher auf die Skalierbarkeit des pp.), 2020. 10.3390/s20143910. Multi-Distanz-Ansatzes, um entsprechende geometrische [12] M. Pillarz, A. von Freyberg, D. Stöbener und A. Fischer. Messungen von Großverzahnungen zu validieren. Gear shape measurement potential of laser triangulation and confocal-chromatic distance sensors. Sensors, 21(3):937(22 Danksagung: Die Autoren bedanken sich herzlich bei der pp.), 2021. 10.3390/s21030937. [13] D. Stöbener, A. von Freyberg, M. Fuhrmann und G. Goch. Deutschen Forschungsgemeinschaft (DFG) für die Förde- Areal parameters for the characterisation of gear distortions. rung des Forschungsprojektes (FI 1989/2-1). Materialwissenschaft und Werkstofftechnik, 43(1-2):120–124, 2012. 10.1002/mawe.201100898.
Sie können auch lesen