Robuster autonomer Segway
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Robuster autonomer Segway
Ziel: Neukonzeption robuster Segway (äußere Störungen, Limbo,…)
Konzeption des mechatronischen Gesamtsystems
— Modellierung und Simulation der Dynamik
— Lösung der inversen Dynamik für definierte Bewegungen (Fahrten,
Aufrichten aus Schräglage, Aufprall)
Entwurf der Steuerung
— Modellbasierte Steuerung/Regelung
— Adaptive Regelung (Erkennen von externen Lasten)
Sensorik, Umgebungswahrnehmung
— Inertialsensor/Gyroskop (IMU)
— 3D Kamera, Kartenerstellung
— Optimale Anordnung der Sensoren
Implementierung als Prototyp
1
Autonomes kreiselstabilisiertes Fahrrad
Adaption der Hardware
— Leistungselektronik
— Anordnung der Kreisel
— Messung der Radwinkel
für Geschw. Regelung
— Optischer Aufputz
Modellbildung Fahrrad
Bahnregelung
— Kinematisches Modell
— Dynamisches Modell
2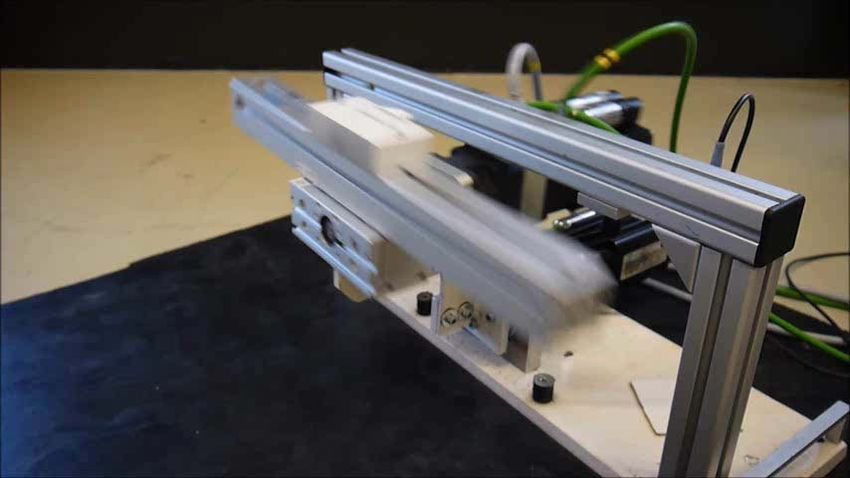
Regelung schneller elastischer Gelenke
Modellierung elastisches System
— Unilaterale Bindungen
Nichtlineare Regelung
— Flachheitsbasiert – ohne ext. Rückführung
— Flachheitsbasiert – mit
ext. Rückführung
Iterative lernende Regelung
Vergleich der Verfahren
3
Nichtlineare Regelung des MeMa – Cube
Hardwareadaption
— Leistungselektronik, µController, IMU, AKKU
(im Moment dSpace, selbstgebaute Elektronik)
Normierung und Auslegungsoptimierung
Entwurf nichtlinearer Regler
— Regler für Satelliten geeignet
— Cubli Regler
4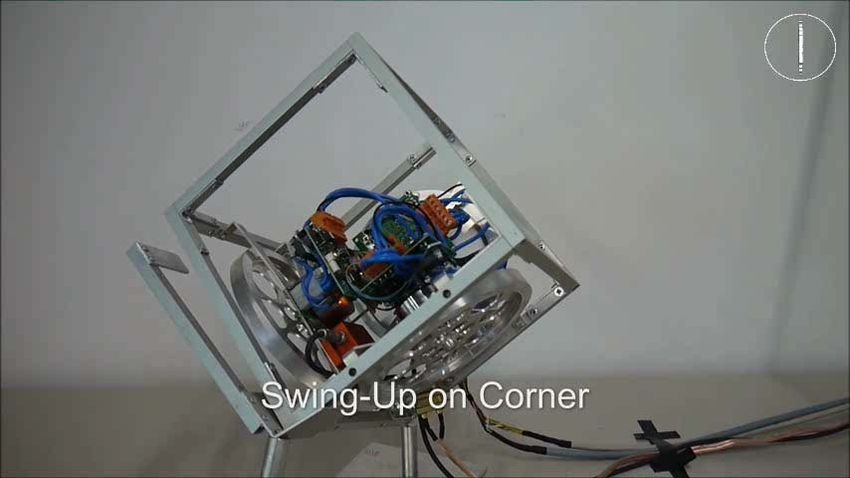
Dynamische Regelung und lokale Bahnplanung eines
mobilen Roboters
Aufgaben:
Dynamische Modellierung und Identifikation
• Modellierung des Chassis
• Bestmögliche Anregung mittels optimierter
B‐Spline Bahnen
• Identifikation und Validierung der
Basisparameter
Regelungskonzept
• Implementierung einer Momentenvorsteuerung mit PI‐
Regelung auf Geschwindigkeitsebene
• Fusion mit dem vorhandenen kinematischen Regler
Navigation
Verwendung des Navigation Stacks von ROS zur Navigation
und Lokalisierung (LaserScanner)
Implementieren eines Interpolators im RTAI‐Prozess
Implementierung eines lokalen Bahnplaners:
Bestmögliches Folgen eines globalen Planes mit
Berücksichtigung der Bindungen, Kollisionen (rollout
approach) 5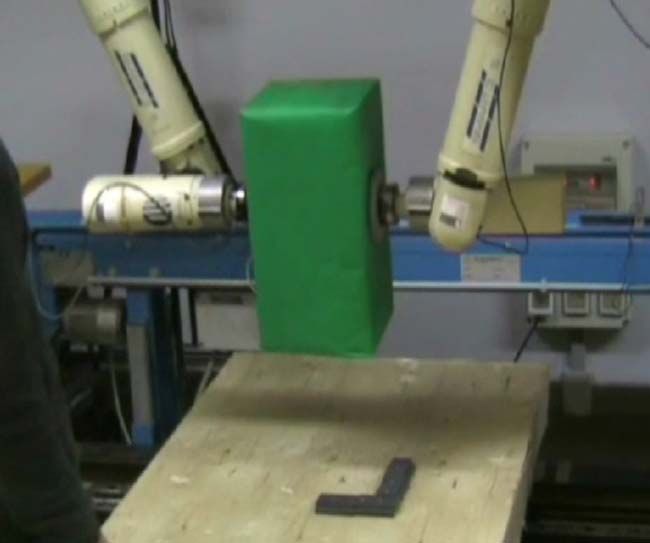
Masterarbeit
Lokalisierung und Kartenerstellung im Wald
Für die Positionsbestimmung von Fahrzeugen wird im Outdoor‐Bereich meist GPS herangezogen. Bewegt sich das
Vehikel jedoch in Regionen ohne Blickkontakt zu den Satelliten (z.B. im Wald), liefert diese Methode zu ungenaue
Ergebnisse. Als Alternative können SLAM (Simultaneous Localization and Mapping)‐Verfahren herangezogen werden.
Diese basieren auf Sensoren wie Laserscannern (z.B. HectorSLAM), oder Stereokameras (z.B. RT‐SLAM, RTAB‐Map),
meist in Kombination mit Inertialsensoren. SLAM‐Algorithmen ermitteln nicht nur die Position und die Orientierung des
Fahrzeugs innerhalb einer (unbekannten) Umgebung, sondern erstellen auch eine Karte der Umgebung selbst.
Ziel: Vergleich von Outdoor‐fähigen SLAM‐Verfahren
auf Basis von Laserscan‐ und 3D‐Kamera‐Daten, und
Fusion der beiden Methoden.
Recherche bezüglich outdoor‐fähiger SLAM‐Verfahren
Aufbau von Prototyp‐Systemen
Durchführung von Messungen im Wald
Optimierung bzgl. Positions‐ und Orientierungs‐
Bestimmung ohne loop‐closure
Kontakt: christoph.stoeger@jku.at / florian.hammer@lcm.at In Kooperation mit dem
6
Roboterkooperation
Ziel: Manipulation von schweren Objekten mit Robotern
Literaturrecherche PRISMA, DLR
Dynamische Modellierung und modellbasierte
Regelung von zwei Industrierobotern
Reine Positionsregelung führt zu Verspannungen
bei den Robotern. Ausweg: Kraftregelung
Implementierung einer Kraft/Impedanzregelung
(ein Roboter) zur Manipulation von schweren
Objekten
Praktische Umsetzung im Labor mit B&R
Hardware
7
Elastischer Roboter ElRob
Ziel: Vergleich verschiedener Schwingungsdämpfungsmethoden für elastische
Roboter
Hardwareadaption (defekte 1 Achse –
Verstärkung Ellbogengelenk)
Echtzeitsystem: dSpace
Dynamische Modellierung weitgehend vorhanden
Schwingungsdämpfung erfolgt im Moment über
nichtlokale Krümmungsrückführung – Änderung:
Berechnung der Sollkrümmungen über
Schnittmomente
Alternative Regelung über
Beschleunigungsrückführung
Vergleich der Verfahren
8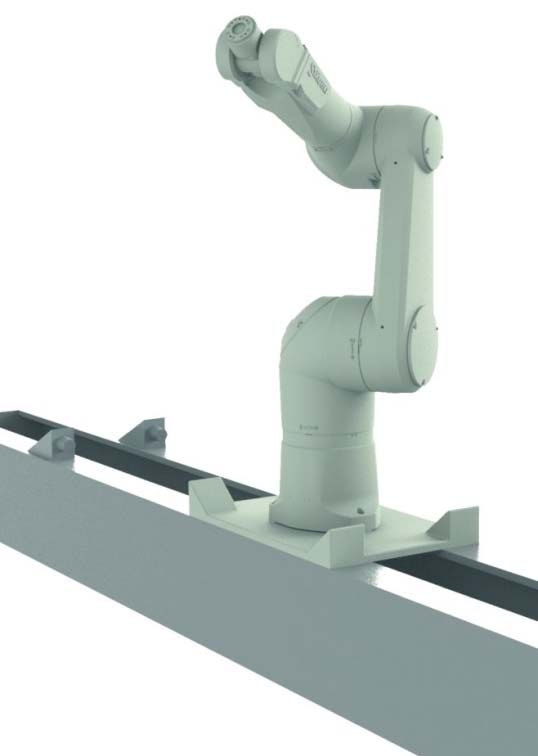
Schnelle iterativ lernende Kraftregelung
mit einem Linearroboter
Ziel: Es soll eine iterativ lernende Kraftregelung am Linearroboter umgesetzt werden,
welche sehr schnell einer Kontur mit unbekannter Kontaktsteifigkeit folgt.
Modellierung und Simulation
Roboter
Umgebung
Regelstrategie
Simulation verschiedener Regelstrategien
Umsetzung erfolgversprechender Strategien
am Industrieroboter
9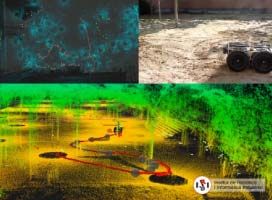
Masterarbeit
Zeitoptimale Bahnplanung mittels
Iterative Learning Control (ILC)
Ziel: Zyklische Performancesteigerung des zeitoptimalen
Bahnplanungsproblems mittels Iterative Learning Control
Literaturrecherche
— Optimierung mittels Log-Barrier Methode
— Optimierung mittels Second Order Cone Problem (SOCP)
— Iterative Learning Control (ILC)
Zeitoptimale Bahnplanung
— Implementierung der Log-Barrier Methode
— Implementierung der Optimierung mittels SOCP
— Convex Relaxation beim SOCP
Iterative Learning Control
— Entwurf eines ILCs
— Kombination ILC und zeitoptimale Bahnplanung
10Masterarbeit
Optimale Trajektorienplanung für
kinematisch redundante Roboter
Ziel: Berechnung von zeit- bzw. energieoptimalen Trajektorien für
kinematisch redundante Roboter entlang von gegebenen Endeffektorpfaden
Optimierung der Trajektorie des Bahnparameters
Lösung der Inverskinematik mit numerischen Methoden
— Ausnutzung der Redundanz durch Maximierung von Performance-Indizes
wie z.B. kinematische oder dynamische Manipulierbarkeit
Modellbildung für einen ebenen Manipulator mittels Projektionsgleichung
— Implementierung eines n-Arm-SCARA-Generators
— Rendering-Modell in Blender
Anwendung auf 6 DOF Stäubli TX90L Industrieroboter mit Linearachse
— Kinematik-Modellbildung
— Simulation
— Experiment am realen Roboter
11
Kontakt: Alexander Reiter, Raum MT503, alexander.reiter@jku.at, +43 732 2468 6497Masterarbeit
Echtzeitfähiger Algorithmus für die
Vorwärtsdynamik serieller Roboter
12
Kontakt: Andreas Müller, Raum MT503, a.mueller@jku.at, +43 732 2468 6491Sie können auch lesen