Situated Reference in a Hybrid Human-Robot Interaction System - M. Giuliani et al. 2010
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Situated Reference in a Hybrid
Human-Robot Interaction System
M. Giuliani et al. 2010
vorgetragen von Bernadett Smolibocki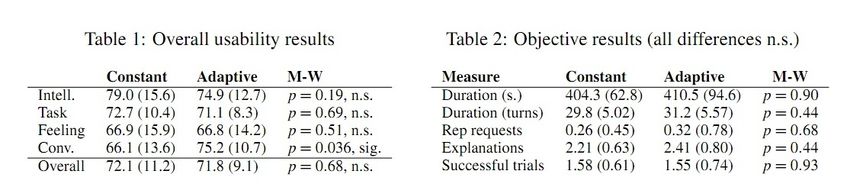
Überblick • Mensch-Roboter-Dialogsysteme • Referenzgenerierung • Experiment (Evaluation) • Ausblick

Mensch-Roboter-Dialoge
Was will der
Was ich alles mir schon
so kann..?! sagen…?!
Guiliani et al. 2010 www.clipproject.info
Mensch-Roboter-Dialoge
First we will build a windmill. Okay.
{Picks up a yellow cube, unnecessary
piece for windmill.}
You don‘t need a yellow cube to
build a windmill.
To build a windmill, you first need to
build a tower.
{Picking up and holding out red
cube.}
To build the tower, insert the green
bolt through the end of this red
cube and screw it into the blue cube.
{Takes cube, performs action}.
Okay.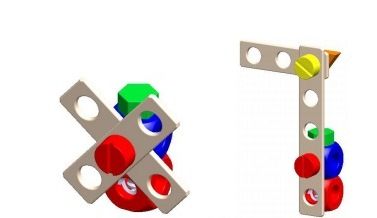
Architektur
Dialogue History
Physical Context speech, object recognition, gesture
Task Context System Input Channel recognition
symbolic
uses
and choose a response
Multimodal
Dialogue unified hypotheses
Fusion
Manager
Component
sends a high-level spezification of
the desired response to the
sub-symbolic
Output
Planner Goal selects the robot`s next action
Inference based on the human user`s actions
and utterances
Module
Output linguistic content (including mulitmodal referring
expressions),
Channel facial expressions, gaze behaviours of the talking
head, actioins of the robot manipulatorsReferenzgenerierung
• für die Generierung werden zwei unterschiedliche Versionen des inkrementellen
Algorithmus` (Dale & Reiter 1995) verwendet
1) konstante Version
soweit bekannt, generiert definite und indefinite Referenzen, und die am ehesten
geeigneten Attributkombinationen
2) adaptive Version
nutzt zusätzliche Informationen (Dialog-, Taskkontexte), produziert pronominale und
deiktische Referenzen (es, hier, dort)Referenzgenerierung
Erweiterung des Algorithmus` von (Dale & Reiter 1995):
- Modul speichert jetzt zusätzlich auch die Historie der Ausdrücke, die bereits
erwähnt wurden, sowohl vom User als auch vom System
- die bereits verwendeten Ausdrücke werden für die Generierung neuer Ausdrücke
zusammen mit einer Distraktorenmenge verwendet
- somit gibt es zwei Arten von Objekten, zu denen Referenzen generiert werden
sollen
1) konkrete Objekte: in unserem Fall alle Objekte auf dem Tisch oder
in der Hand des Users oder Roboters
es sind drei Arten an Distraktorenmengen nötig
2) Objekte, die noch erstellt werden.
Keine Distraktorenmenge nötig, es wird der Name des Objektes
verwendetReferenzgenerierung zu 1) die Distraktorenmengen a) alle Teile, die zur Vervollständigung des Targetobjekts nötig sind b) alle Objekte, die seit der letzten Erwähnung auf dieses jeweilige Objekt hinwiesen c) alle konkreten Objekte in der Welt Wann werden nun welche Typen an DMengen verwendet? a) wird ein falsches Tool verwendet zur Vervollständigung eines Tasks b) in allen Fällen, in denen das jeweilige aktuelle Objekt (OUC) bereits erwähnt wurde c) in allen Fällen, in denen das jeweilige aktuelle Objekt (OUC) nicht erwähnt wurde
Referenzgenerierung
Ablauf:
1. DMenge abarbeiten
Eigenschaften des OUC werden mit den Eigenschaften der Disktraktoren
verglichen
sind die Typen eines Distraktors und des OUC verschieden, so wird der
Distraktor aus der DMenge entfernt
weiter mit allen weiteren Eigenschaften
die Eigenschaften eines OUC werden einer Liste hinzugefügt
2. Typenwahl der jeweiligen Ausdrücke
schaue nach vorherigen Referenzen (PR) des OUC
wenn es welche gibt: entscheide, ob es im Fokus warReferenzgenerierung
1) keine PR:
- verwende einen indefiniten Artikel, wenn OUC noch nicht existiert oder eine negative Referenz
erstellt wird oder wenn OUC und Distraktoren existieren
- verwende einen deiktischen Ausdruck, wenn der Roboter das OUC in der Hand hält
- verwende definite Artikel, wenn das OUC existiert, jedoch keine Distraktoren vorhanden sind
2) PR ist im Fokus:
- verwende ein Pronomen, wenn die PR im aktuellen Prozess ist
- verwende ebenfalls ein Pronomen, wenn PR im vorherigen Schritt vorhanden war, wenn der
Roboter das OUC gerade nicht in den Händen hält
- verwende deiktische Ausdrücke, wenn der Roboter das OUC in den Händen hält
3) PR ist nicht im Fokus:
- siehe 2.3
- verwende einen definiten Artikel, wenn die PR ein Pronomen, definiter oder deiktischer Artikel war
- verwende definite Artikel, wenn die PR indefinit war und keine Distraktoren existieren
- verwende indefinite Artikel, wenn die PR indefinit war und Distraktoren existieren
4) Die Sache mit der OUC-Liste:
- existieren noch Eigenschaften eine OUC und soll kein Pronomen verwendet werden, so füge die Eigenschaften
zum Ausdruck hinzuReferenzgenerierung
Das Beispiel mit „the green bolt“ = „it“:
- bevor das Pronomen verwendet wurde, ist diesen Objekt genannt worden (definit)
- „ To build the tower, insert the green bolt through the end of this red cube and screw it
into the blue cube.“
- DMenge = alles zwischen „the green bolt“ und „it“ {red cube}
- Typ der DMenge ≠ Typ des OUC
Dmenge = Ø
da bereits eine definite Referenz im selben Satz existiert, kann gefahrlos ein
Pronomen verwendet werdenErgebnis
Evaluation
Wie gut wurde der Der soll erst
weiterentwickelte mal sprechen
„Konstant, adaptiv,
Algorithmus beurteilt? lernen..
konstant, adaptiv…“
Guiliani et al. 2010 www.clipproject.infoResultate Welche objektiven Faktoren haben den größten Einfluss, um den User zufrieden zu stellen? Wiederholungsanfragen (negativen Effekt) Korrektes Erstellen eines Targetobjekts (positiven Effekt)
Literatur Guiliani et al. (2010). Situated reference in a hybrid human-robot interaction system. Foster et al. (2008). The roles of haptic-ostensive referring expressions in cooperative, task-based human-robot dialogue.
Sie können auch lesen