Sparen mit dem Sparmotor - Energieeffiziente Antriebsstränge mit Motoren nach IEC 60034-30 - Deutsches Kupferinstitut
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Sparen mit dem Sparmotor Energieeffiziente Antriebsstränge mit Motoren nach IEC 60034-30

Sparen mit dem Sparmotor
Energieeffiziente Antriebsstränge 5 Der finanzielle Anreiz für
mit Motoren nach IEC 60034-30 . . . . . . . . . . . . . . . . . . 1 Hochwirkungsgrad-Motoren. . . . . . . . . . . . . . . 20
1 Einführung / Allgemeines. . . . . . . . . . . . . . . . . . 2 5.1 Berechnung der Amortisationszeit . . . . . . . . . . . . 20
1.1 Stromverbrauch . . . . . . . . . . . . . . . . . . . . . . . . . . 2 5.2 Beispiel einer Realisierung der Effizienzklasse IE4 . 20
1.2 Umweltschutz . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Einsparpotenzial. . . . . . . . . . . . . . . . . . . . . . . . . . 3 6 Technologiesprung in Richtung besserer
Wirkungsgrade: Kupferrotoren. . . . . . . . . . . . . . 21
2 Systemeffizienz . . . . . . . . . . . . . . . . . . . . . . . . . 5 6.1 Geringe Eisenverluste . . . . . . . . . . . . . . . . . . . . . . 21
2.1 Grundsätzliches zu Elektromotoren. . . . . . . . . . . . . 5 6.2 Geringeres Anlaufmoment. . . . . . . . . . . . . . . . . . . 22
2.2 Energiesparmotor. . . . . . . . . . . . . . . . . . . . . . . . . 6 6.3 Mehr Drehmoment, mehr Leistung. . . . . . . . . . . . . 22
2.3 Frequenzumrichter (Umrichter). . . . . . . . . . . . . . . . 6 6.4 Einfachere Gestaltung des Läufers . . . . . . . . . . . . . 23
2.3.1 Problem des Frequenzumrichters: EMV. . . . . . . . . . 7
2.3.2 Der nachgerüstete Umrichter. . . . . . . . . . . . . . . . . 8 7 Andere Methoden des Energiesparens in der
Antriebstechnik . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.3 Nutzen des Frequenzumrichters . . . . . . . . . . . . . . . 8
8 Fazit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3 Die ersten Effizienzklassen. . . . . . . . . . . . . . . . . 10
8.1 Nicht jede Sparmaßnahme spart … . . . . . . . . . . . 26
3.1 Entstehung / Historie CEMEP /
EU-Kommission – Abkommen. . . . . . . . . . . . . . . . 10 8.2 …doch wird auch manche Sparmaßnahme
nicht als solche erkannt . . . . . . . . . . . . . . . . . . . 26
3.2 Die ersten Wirkungsgradklassen „EFF3“ bis „EFF1“ –
politische und rechtliche Rahmenbedingungen. . . . 11
9 Warum werden die augenscheinlichen
Vorteile nicht in umweltpolitisch gewünschtem
4 Die gültigen Effizienzklassen
Umfang genutzt?. . . . . . . . . . . . . . . . . . . . . . . . 27
Motorenwirkungsgrad-Klassifizierungsschema
(MEPS) nach DIN EN 60034-30. . . . . . . . . . . . . . . 12
4.1 Übersicht der „MEPS“-Wirkungsgrade. . . . . . . . . . . 12 10 Literatur
10.1 DIN-VDE-EN-IEC-Normen. . . . . . . . . . . . . . . . . . . 28
4.2 Nicht erfasste Motoren . . . . . . . . . . . . . . . . . . . . . 13
10.2 Dokumente der EU. . . . . . . . . . . . . . . . . . . . . . . 28
4.2.1 Doppelt gespeiste Synchronmaschinen. . . . . . . . . . 13
10.3 Weitere. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2.2 Permanentmagnet-Synchronmotoren. . . . . . . . . . . 13
10.4 Entsprechende Quellen für andere Länder. . . . . . . 29
4.2.3 Reluktanzmotoren . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2.4 Hybridmotoren. . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3 Super-Premium-Wirkungsgrad (IE4). . . . . . . . . . . . 18
Herausgeber: Alle Rechte, auch die des aus-
Deutsches Kupferinstitut zugsweisen Nachdrucks und
der photomechanischen oder
Am Bonneshof 5 elektronischen Wiedergabe,
40474 Düsseldorf vorbehalten.
Telefon: (0211) 4 79 63 00
Telefax: (0211) 4 79 63 10
info@kupferinstitut.de
www.kupferinstitut.de 1. Auflage 2011
2 | Deutsches Kupferinstitut
Energieeffiziente Antriebsstränge mit Motoren
nach IEC 60034-30
Schon seit über zehn Jahren gibt es • Diese Motoren senken die Schalt- und Aluminium. Aber gerade dies ist
ihn: den Energiesparmotor. Wegen der schranktemperaturen. Ursache für die Verbesserung des Mo-
hohen und tendenziell weiter anstei- torwirkungsgrads, für die Erhöhung
genden Energiekosten, der jüngsten • Diese Motoren haben größere Über- der Lebensdauer, für das Senken der
internationalen, europäischen sowie lastreserven im Dauerbetrieb. Betriebskosten und damit für all die
deutschen Gesetzgebung und Normung ökonomischen Vorteile, die für den
ist der Einsatz des Energiesparmotors • Diese Motoren bieten dem Maschi- Energiesparmotor sprechen.
trotz der zunächst etwas höheren nenhersteller Wettbewerbsvorteile
Anschaffungskosten ein Gebot der am europäischen und internationa- Trotz der enormen Vorteile des Ener-
Stunde. Viele wirtschaftliche und len Markt. giesparmotors konnte dieser Motortyp
technische Argumente sprechen für nur langsam den ihm gebührenden
seine Anwendung: • Diese Motoren schonen nicht nur die Platz einnehmen. Die Gründe lagen
Umwelt, sondern sind darüber hin- neben der mangelnden Information
• Diese Motoren erwärmen sich weni- aus noch wirtschaftlicher als die auch in der Unsicherheit bei der
ger (geringere thermische Ausnut- Standardmotoren und amortisieren Produktauswahl, in der fehlenden
zung) und sparen dadurch nicht nur sich sogar in kürzester Zeit. Transparenz hinsichtlich des Energie-
Energie, sondern haben damit auch sparpotenzials und dem fehlenden
eine höhere Betriebssicherheit, also Energiesparmotoren haben in der Umweltbewusstsein.
geringere Ausfallwahrscheinlichkeit, Regel dieselben Anbau- und An-
und eine längere Lebensdauer. schlussabmessungen wie Standard- Energie lässt sich insbesondere mit
motoren und sind deshalb mechanisch drehzahlgeregelten Antrieben, auch
• Diese Motoren schonen die vorhan- und elektrisch meistens kompatibel bei häufigen Last wechseln, sowie mit
denen Ressourcen. – sie können oft problemlos an die Energiesparmotoren in Kombination
Stelle von Standardmotoren treten. mit Frequenzumrichtern einsparen.
• Diese Motoren benötigen weniger Nur bei einigen Baugrößen sind die
Schmiermittel, so dass die War- Energiesparmotoren länger. Grund
tungsintervalle verlängert werden hierfür ist ein höherer Anteil an ak-
können. tiven Werkstoffen wie Eisen, Kupfer
Sparen mit dem Sparmotor |1
1 Einführung / Allgemeines
Umweltgutachten wie die der UNO zei-
gen, dass durch die Verbrennung fossi-
ler Brennstoffe das Weltklima verändert
wird. Dies geschieht vornehmlich durch
den hohen Energieverbrauch der In-
dustrieländer. Die stürmische Entwick-
lung der Schwellenländer verschärft
diese Situation weiter dramatisch. Man
kann davon ausgehen, dass, wenn der
Pro-Kopf-Verbrauch dieser Länder das
Niveau der führenden Industrienatio-
nen erreicht, die Primärenergieträger
unserer Welt in absehbarer Zeit der
Erschöpfung entgegengehen.
1.1 Stromverbrauch
In Deutschland belief sich der Netto-
Stromverbrauch im Jahr 2009 auf 512
TWh. Hiervon verbrauchte die Industrie
45 % oder 228 TWh. Davon wiederum
entfallen gut zwei Drittel oder 170 TWh
auf elektrische Antriebe bzw. elektro-
motorisch angetriebene Systeme
(Bild 1, Tabelle 1).
1.2 Umweltschutz
Die Reduzierung des CO2-Ausstoßes ist
das Ziel aller Industrie- und Schwellen-
länder. Eine gigantische Herausforde-
rung, nicht nur für die derzeitige, son-
dern auch für zukünftige Generationen. Bild 1: Nettoverbrauch elektrischer Energie in Deutschland 2009
(www.bdew.de/internet.nsf/id/DE_Energiedaten)
Unternehmen aus Deutschland sind im
Bereich Energieeffizienztechnologien
gut aufgestellt und nehmen internati- bei Klimaschutztechnologien. Man Der Einsatz energieeffizienter Techno-
onal eine Vorreiterrolle ein: Nach An- geht davon aus, dass sich das Welt- logien wirkt sich aber nicht nur auf
gaben des Bundesumweltministeriums marktvolumen in den nächsten Jahren den Klimaschutz und die Wettbe-
im Jahr 2009 verfügen hiesige Firmen für diese Zukunftsbranche noch ver- werbsfähigkeit der Unternehmen aus,
über einen Weltmarktanteil von 16 % doppelt. sondern hat für die gesamte Volks-
wirtschaft positive Effekte. Bei einem
Primärenergieverbrauch von weniger
als 7 GJ pro 1.000 Euro Bruttoinlands-
Netto-Stromverbrauch in Deutschland (BDEW) 2008 2009 produkt zählt Deutschland heute zu
Erzeugung Stromversorger 517,5 TWh 492,4 TWh den produktivsten Industrieländern.
Eigenanlagen 20,9 TWh 19,4 TWh Die Bundesregierung geht in ihrem
Gesamt 538,4 TWh 511,8 TWh
Energieeffizienzplan davon aus, dass
in den kommenden Jahren mehr als
Verbrauch Industrie Stromversorger 232,4 TWh 209,6 TWh 30 Mio. Euro in diesen Bereich fließen
Gesamt 20,0 TWh 18,5 TWh
werden. Dadurch würden 500.000
neue Arbeitsplätze geschaffen werden.
Verkehr 16,5 TWh 16,0 TWh
Öffentliche Einrichtungen 46,0 TWh 46,0 TWh
Mit den errechneten Einsparpotenzia-
len von 27,5 TWh/a für Deutschland al-
Haushalte 139,5 TWh 139,2 TWh leine ergäbe sich eine Entlastung der
Handel und Gewerbe 75,3 TWh 73,8 TWh
Umwelt durch die hier erreichte Redu-
zierung des Ausstoßes von Kohlendi-
Gesamt 529,7 TWh 503,1 TWh oxid in Höhe von etwa 16,9 Mio. Ton-
nen!
Tabelle 1: Stromverbrauch in Deutschland
2 | Deutsches Kupferinstitut
1.3 Einsparpotenzial
Beim Stromverbrauch fällt den Elektro-
motoren eine Schlüsselrolle zu. Sie ver-
brauchen rund ein Drittel der insgesamt
in Deutschland erzeugten elektrischen
Energie. Am meisten könnten effizien-
tere Drehstrommotoren im Leistungsbe-
reich von 1,1 kW bis 37 kW sparen. Die
Herstellkosten steigen pro Wirkungs-
gradklasse jedoch um etwa 10 % bis
20 %. Die Erfahrung lehrt, dass unter
diesen Umständen eine wesentliche
Marktverschiebung nur durch finanzielle
Anreize oder gesetzliche Vorgaben zu
erreichen ist.
Von den rund 100 Mio. Haushaltsgerä-
ten, die mit elektrischen Kleinmotoren
betrieben werden, haben die meisten
Bild 2: Energie-Umsatz in großen und kleinen Motoren
Wirkungsgrade zwischen 40 % und
75 %. Möglich wären nach VDE-Ein-
schätzung 85 %. Damit verbundene Ein weiteres Einsparpotenzial liegt in vielen Möglichkeiten der Energieein-
Energieeinsparpotenziale beziffert der der Verwendung von Energiesparmoto- sparung auf das wichtige Thema der
Verband auf rund 8,2 TWh pro Jahr. Da ren. Auch hier gilt, dass, wenn man elektrischen Antriebe und hier insbe-
auch diese Motoren einen erheblichen die in der deutschen Industrie einge- sondere der Elektromotoren gelenkt
Anteil am gesamten Energieverbrauch setzten 30 Mio. „Alt“-Motoren mit werden. Dieser Sektor stellt zwar den
haben (Bild 2), ist das Sparpotenzial niedrigen Wirkungsgraden sukzessive kleineren Teil des gesamten Sparpo-
hier am größten. gegen „Neu“-Motoren mit hohen Wir- tenzials, umso mehr aber auch den
kungsgraden austauscht, ein jährliches kleineren Teil der Investitionen dar,
In Deutschland gibt es rund 30 Mio. Einsparpotenzial von über 5,5 TWh bietet entsprechend kurze Amortisati-
Heizungspumpen mit einer Leistung von oder 440 Mio. Euro erreicht werden onszeiten und ist daher einer geson-
jeweils unter 200 W. Sie verbrauchen kann. derten Betrachtung wert (Bild 4).
etwa 3,5 % der in Deutschland insge-
samt eingesetzten elektrischen Energie. Da die Energieerzeugung und die me- Überall in den heutigen Produktions-
Das ist so viel wie der Verbrauch aller chanische Systemoptimierung mit ih- prozessen werden elektrische Antriebe
Schienenfahrzeuge der Deutschen Bahn ren großen Einsparpotenzialen nicht verwendet. Keine effiziente Fabrikati-
und des öffentlichen Nahverkehrs. Neu- Gegenstand dieser Broschüre sind, soll onsstruktur und kein moderner Mate-
este elektronisch geregelte Heizungs- das Augenmerk des Lesers aus den rialtransport kommen ohne Elektro-
pumpen kommen mit bis zu 50 % we-
niger Energie aus als moderne Stan-
dardpumpen mit Asynchronmotoren
und mit bis zu 70 % weniger als unge-
regelte Pumpen wie sie vielfach noch in
Gebäuden anzutreffen sind [25].
Wenn man die Anzahl derzeit mit elek-
tronischer Drehzahlregelung betriebener
Antriebe von nur etwa 12 % auf die
sinnvoll machbare Größe von 50 % aus-
weiten würde, ließe sich laut ZVEI eine
Energieeinsparung von rund 40 % oder
etwa 27,5 TWh/a erreichen. Dies ent-
spricht in etwa dem Äquivalent von
neun Kraftwerksblöcken der 400-MW-
Klasse. Bei einem mittleren Strompreis
von etwa 0,08 €/kWh, wie ihn die In-
dustrie heute zahlt, ergeben sich hier
schon Kosteneinsparungen von 2,2 Mrd.
Euro pro Jahr! Bild 3: Durchschnittliche Lebensdauer von Drehstrom-Asynchronmotoren – Große leben länger
Sparen mit dem Sparmotor |3
Pumpe mit nachfolgendem Rohrsys-
tem). Die Wirkungsgrade der einzelnen
Komponenten bestimmen den gesam-
ten Wirkungsgrad, man sollte also die
optimale Anpassung des kompletten
Antriebsstrangs anstreben.
Ein sinnvoller erster Schritt zur Opti-
mierung eines „Antriebsstrangs“ be-
steht immer in der Überprüfung der
Dimensionierung seiner einzelnen
Komponenten. Sehr oft findet man,
dass „Sicherheiten“ eingebaut sind,
die eine Wirtschaftlichkeit ad absur-
dum führen, da Elektromotoren, an-
ders als die meisten anderen elektri-
schen Betriebsmittel, ihre besten Wir-
kungsgrade erst bei einer Auslastung
von 80 % bis 90 % erreichen. Schon
Bild 4: Die Anschaffungskosten fallen im Vergleich zu den Energiekosten nicht ins Gewicht, hier z. die richtige und genaue Anpassung der
B. für einen Normmotor von 11 kW, gerechnet mit 0,066 €/kWh, 3000 h/a Volllast-Betrieb, 10 Jahre einzelnen Bauteile an die geforderten
Lebensdauer
Anwendungen und Leistungen hilft,
Energie zu sparen und die Umwelt zu
motoren aus. Hier lohnt es sich, den Stück bewegt. Das jährliche Absatz- entlasten. Als Nebeneffekt ergeben
Hebel anzusetzen. Die Optimierung der volumen liegt bei rund 3 Mrd. Euro sich darüber hinaus Kosteneinsparun-
Anwendungen und Einsatzbereiche für Niederspannungsmotoren und bei gen bei Beschaffung, Montagefläche
führt zu einer wesentlich besseren etwa 1 Mrd. Euro für Umrichter. etc. durch die Verwendung optimal
Ausnutzung und Schonung der Res- angepasster Bauteile. Diese Broschüre
sourcen, zur Reduzierung von Umwelt- Ein Antriebssystem für einen Prozess stellt zwar den verbesserten Wirkungs-
belastungen und Fertigungskosten. besteht oft aus einer Steuereinheit, ei- grad des Elektromotors in den Vorder-
Man geht davon aus, dass sich der Be- nem Frequenzumrichter, einem Motor, grund, aber auch die anderen Kompo-
stand installierter Antriebe im Nieder- einem Getriebe und einer Kupplung nenten des Prozessflusses werden hier
spannungsbereich bei etwa 30 Mrd. sowie der „Last“ (zum Beispiel eine kurz angesprochen.
4 | Deutsches Kupferinstitut
2 Systemeffizienz
2.1 Grundsätzliches zu Elektro-
motoren
Laut Definition ist ein Elektromotor ei-
ne Maschine, die elektrische in me-
chanische Energie umwandelt. Für An-
lagen und Geräte in allen Bereichen
der Industrie und des Gewerbes wer-
den Elektromotoren als Antriebsma-
schinen eingesetzt. Durch ihre robuste
und kompakte Bauart, durch von Na-
tur aus schon relativ hohe Wirkungs-
grade, durch einfache Installation und
Wartung, durch geringen Verschleiß
und durch einfache Energiezufuhr
werden sie gegenüber anderen An-
triebsmaschinen bevorzugt. Sie lassen
sich bequem an die elektrischen und
mechanischen Anforderungen und die
Betriebseigenschaften der Maschinen
Bild 5: Aufteilung des Motorenmarkts in Deutschland 2008
anpassen.
Elektromotoren gliedern sich, je nach Die Zusammenstellung in Tabelle 2 und Läufer. Der Gesamtbetrag dieser
Ausführung, in verschiedene Motorty- gibt eine Übersicht über die Zusam- zusätzlichen Verluste hängt nicht von
pen. Man spricht in erster Linie von mensetzung der Motorverluste sowie der Belastung ab und verkleinert sich
Wechselstrom- oder Gleichstrommoto- der Auslegungs- und Konstruktions- mit wachsender Schaltfrequenz. In un-
ren. Für beide Gattungen gibt es noch faktoren, die ihre Größe beeinflussen. günstigen Fällen können die zusätzli-
ein weites Feld zugeordneter Motor- chen Verluste aufgrund von Umrichter-
arten (Bild 5). Betrachtet werden in Grundsätzlich können die Verluste speisung die gesamten Motorverluste
dieser Broschüre Drehstrom-Asychron- durch vermehrten Einsatz aktiven Ma- um 15 % bis 20 % im Vergleich zur
motoren (dreiphasige Drehfeldmoto- terials am Motor, d. h. die Art und Netzspeisung erhöhen. (Bezüglich
ren). Menge der Leiter- und Magnetmateri- Einzelheiten siehe IEC 60034-17 und
alien, verkleinert werden. Die Span- IEC 60034-25 DIN VDE 0530-17,
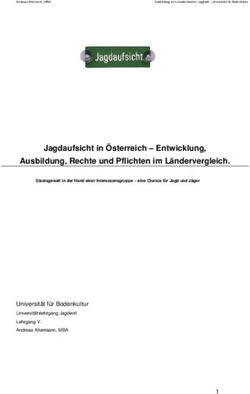
Der Drehstrom-Asynchronmotor ist nungs- und Strom-Oberschwingungen DIN VDE 0530-25).
dank seines einfachen und robusten eines Induktionsmotors mit Käfigläufer
Aufbaus sowie seiner Betriebssicher- bei Speisung aus einem Frequenzum- Der Wirkungsgradverlauf eines Motors
heit und Wirtschaftlichkeit der mit richter verursachen zusätzliche Eisen- wird durch Stromwärmeverluste sowie
Abstand am weitesten verbreitete und Stromwärmeverluste in Ständer die Eisen-, Lager- und Luftreibungs-
Drehstrommotor für industrielle An-
triebe. Der aktive Teil des Motors be-
steht aus einem Ständer- und einem
Läuferblechpaket. Er entspricht elek-
trisch einem Transformator mit einem
primären und einem sekundären Teil.
Der Unterschied des Motors gegen-
über dem statischen Transformator
besteht darin, dass Wicklungen auf
durch Luftspalt getrennte Eisenkerne
aufgewickelt sind. Der Rotor (Läufer)
ist als Sekundärteil drehbar im Stator
(Ständer) des Motors gelagert, dem
Primärteil. Werden der Primärteil an
ein Drehstromnetz angeschlossen und
der Sekundärteil kurzgeschlossen, wird
im Sekundärteil ein Strom also eine
elektromagnetische Kraft erzeugt, und
es entsteht ein Drehfeld. Die zwischen
der Drehfeldleistung und der mecha-
nischen Leistung bestehende Differenz Bild 6: Drehstrom-Asynchronmotor (Normmotor Effizienzklasse IE3 nach DIN EN 60034-30 mit
geht als Stromwärme verloren. Kupferrotor – Werksbild VEM)
Sparen mit dem Sparmotor |5
verluste bestimmt. Stromwärme- Ausgangsleistung von Drehstrommoto-
verluste sind lastabhängig, die ren steigern, indem man diese mit
Eisen-, Lager- und Luftreibungsver- Frequenzen über 50 Hz betreibt, denn
luste sind motorspezifisch und bei , die Motoren laufen dann entsprechend
konstanter Frequenz nicht lastab- also als das Verhältnis von abgegebe- schneller. Typisch werden hier 87 Hz
hängig. Diese Verluste, elektrisch ner zu aufgenommener Energie für ein genannt. Durch die Steigerung der
und mechanisch, bestimmen zusam- definiertes Lastspiel. Leistung kann mitunter auch der Wir-
men mit der Last den Stromverbrauch kungsgrad gesteigert werden, da die
und somit den Wirkungsgrad eines 2.2 Energiesparmotor Verluste nicht notwendigerweise im
Motors. Der Energiesparmotor (Bild 7), auch gleichen Maß steigen wie die Leistung
Hochwirkungsgrad-Motor bzw. ener- (Drehzahl) des Motors.
Die synchrone Drehzahl eines Dreh- gieeffizienter Motor genannt, ist eine
strommotors wird durch die Polzahl wichtige Komponente zur Reduzierung 2.3 Frequenzumrichter (Umrichter)
der Ständerwicklung und durch die des gesamten Energiebedarfs eines Die Optimierung der Systemdrehzahl
Frequenz der Betriebsspannung be- Antriebsstrangs. Die Betriebszeit eines trotz der fixen Netzfrequenz von 50 Hz
stimmt. Bei einer Versorgungsspan- Normmotors kann viele Jahre betra- (bzw. in Nordamerika 60 Hz) und somit
nung mit einer Bemessungsfrequenz gen, oft ist die Lebensdauer eines Mo- das „Fahren“ eines elektrischen An-
von z. B . 50 Hz und einer vierpoligen tors, bedingt durch die wenigen Ver- triebs an der „Lastkennlinie“ setzt also
Wicklung beträgt die Synchrondrehzahl schleißteile (Wälzlager), sogar länger eine elektronische Energieumsetzung
1.500/min. Die unter Last erreichte als die Lebensdauer der von ihm an- (Bild 8 unten, Bild 9), den Einsatz ei-
Drehzahl ist, bedingt durch den getriebenen Maschine (Bild 3). Nur war nes Umrichters, voraus. Durch eine Än-
„Schlupf“ des Rotors, je nach Größe bislang nirgends definiert, was denn derung der „Betriebsfrequenz“ des
des Motors ein bis einige Prozent klei- nun ein „Energiesparmotor“ ist. Motors wird dessen Drehzahl über ei-
ner als die Synchrondrehzahl. Daher nen weiten Bereich geregelt und somit
spricht man hier auch von einem Jeder Hersteller konnte nach Belieben seine Leistungsabgabe, die ein Produkt
Asynchron-Drehstrommotor. jeden Motor so nennen, denn z. B. ab aus Drehmoment und Drehzahl ist, an
etwa 30 kW hat jeder Motor einen den Arbeitsprozess optimal angepasst.
Internationale Normen und Vorschrif- „hohen“ Wirkungsgrad von > 90 %. Die Energiezufuhr wird auf den tat-
ten (ISO, International Organization for So kam es zur Einführung zunächst sächlich benötigten Bedarf begrenzt.
Standardization, sowie IEC, Internatio- der „EFF“-Klassen (Abschnitt 3.2) und
nal Electrotechnical Commission) sind später der „IE“-Klassen (Abschnitt 4). Beim Betrieb ohne Umrichter ist dies
die Grundlagen für die Zuordnung von nicht möglich, da die Drehzahl der
Bauhöhen, Bauformen, Drehzahlen, In Europa liefern die öffentlichen Net- hier betrachteten sogenannten Dreh-
Leistungen, Kühlung und Sicherheits- ze elektrische Energie in Form von ein- feldmotoren nicht etwa von der spei-
vorschriften. phasiger Wechselspannung oder drei- senden Spannung, sondern von der
phasiger Drehspannung einer Frequenz Frequenz abhängig und die Frequenz
Der Wirkungsgrad eines Motors defi- von üblicherweise 50 Hz. Hieraus erge- im Netz konstant ist. Die Ansteuerung
niert sich durch das Verhältnis von ab- ben sich feste Drehzahlen bei den dieses Umrichters erfolgt über einen
gegebener zu aufgenommener Leis- Drehstrommotoren (siehe Abschnitt Mikrorechner und dessen Software.
tung für einen bestimmten Lastpunkt: 2.1). Mittels geeigneter elektronischer Hierdurch wird eine deutliche Steige-
„Schaltgeräte“ lassen sich heute Fre- rung der Energieeffizienz erreicht. Ty-
„Drehzahl / Drehmoment“ (n, M). Der quenzen variieren und somit die Dreh- pisch bei Ventilatoren und Pumpen
Wirkungsgrad η von Drehstrom-Asyn- zahlen der Motoren entsprechend an- sind Einsparungen bis fast 60 %. Ne-
chronmotoren berechnet sich als passen. Unter Umständen lässt sich die ben der reduzierten Energiezufuhr
Verlustart Typischer Anteil an den gesamten Verlusten in Einflussfaktoren der Verlustkomponenten
Vierpolmotoren
Ständerverluste 30 % – 50 % Leiterabmessungen und Material im Ständer
Läuferverluste 20 % – 25 % Abmessungen und Material der Stäbe
Blechpaketverluste 20 % – 25 % Art und Menge der Bleche
Zusatzverluste 5 % – 15 % hauptsächlich Fertigungstechnologie und
Entwurf
Reibungs- und Lüftungsverluste 5 % – 10 % Auswahl/Bemessung der Lüfter und Lager
Tabelle 2: Zusammensetzung der Motorverluste
6 | Deutsches Kupferinstitut
sorgt die Elektronik für einen geregel-
ten Hochlauf des Motors, der als Ne-
beneffekt zusätzlich für die Schonung
des Antriebsstrangs und somit für eine
längere Lebensdauer mit geringeren
Wartungsanforderungen sorgt und
ganz nebenbei noch das Netz von läs-
tigen Spannungseinbrüchen durch ho-
he Einschalt- und Hochlaufströme
entlastet.
Das derzeit angebotene Leistungsspek-
trum von Frequenzumrichtern bewegt
sich zwischen wenigen Watt bis zu et-
lichen Megawatt! Die enormen Fort-
schritte der Leistungselektronik und
der sie steuernden Elektronik hat in
den letzten Jahrzehnten zu einer kon-
tinuierlichen Verbesserung der Um-
richter-Eigenschaften, wie Antriebsver-
halten, Verlustleistung und Baugröße
Bild 7: Faktoren, die aus einem Drehstrom-Asynchronmotor einen „Energiesparmotor“ machen geführt.
(Kaeser Kompressoren)
Mit gestiegenem Einsatz und somit
vermehrter Herstellung der Kompo-
nenten hat sich auch eine deutliche
Verbilligung der Frequenzumrichter re-
alisieren lassen. Mit einem Frequenz-
umrichter betrieben, genügt das An-
triebsverhalten eines geregelten Dreh-
strommotors schon heute den höchs-
ten Ansprüchen. Seine Software
übernimmt zunehmend antriebsnahe
Funktionen zur Prozesssteuerung und
Automatisierung. Sicherheitsfunktio-
nen und Automatisierungskonzepte
werden integriert.
2.3.1 Problem des Frequenzum-
richters: EMV
Bild 8: Speisung von Drehfeldmotoren – einst und jetzt: Einst nur direkt mit der Netzfrequenz
möglich, jetzt mit variabler Drehzahl dank künstlich erstellter Frequenz Eine „einfache“ Umrichtung nach Bild
10 würde nur die Gleichspannung des
Zwischenkreises in regelmäßigem
Rhythmus umpolen und hiermit zeit-
weise eine Wicklung, zeitweise zwei in
Reihe liegende Wicklungen des Motors
speisen. Somit läge eine aus Rechteck-
blöcken bestehende Spannung an dem
Motor an. Da die im Motor induzierte
Gegenspannung – denn ein Elektro-
motor und ein Generator sind im Prin-
zip das Gleiche – aber sinusförmig
verläuft, käme es zu erheblichen Aus-
gleichs-Wechselströmen, da die anlie-
gende Spannung und die vom Motor
selbst erzeugte Gegenspannung in fast
jedem Augenblick stark divergieren
würden – einmal in die eine und ein-
Bild 9: Speisung von Drehfeldmotoren – jetzt: Prinzip-Darstellung – aus Gründen der Anschau-
lichkeit hier an einer "einpoliegen" Synchronmaschine (mit Permanentmagnet) dargestellt mal in die andere Richtung. Beträcht-
Sparen mit dem Sparmotor |7
bestimmt. Umrichter werden für eine
zentrale Montage (Schaltschrank) oder
für dezentrale Montage (auf dem Mo-
tor) angeboten. Die dezentrale Mon-
tage bietet deutliche Vorteile bei der
elektromagnetischen Verträglichkeit
(EMV) sowie bei der Installation und
der Inbetriebnahme.
Dabei stellt die EMV bei Umrichtern in
der Tat ein Problem dar, denn sie ar-
beiten umso effizienter, je höher diese
überlagerte Taktfrequenz ist und je
steiler die Schaltflanken sind, also je
schneller die Halbleiterschalter vom
sperrenden in den leitenden Zustand
und wieder zurück zu schalten in der
Lage sind, denn praktisch nur während
des Übergangs entstehen Verluste. Je
höher die Taktfrequenz ist und je stei-
Bild 10: Schaltfolge des Umrichters zur Erzeugung einer Rotationsbewegung ler die Flanken sind, desto höher reicht
aber auch das Spektrum hochfrequen-
ter Störungen, die aufwändig wieder
liche zusätzliche Erwärmung wäre Da die Glättung und somit die Vermei- gefiltert werden müssen.
die Folge. Daher wird die Ausgangs- dung der zusätzlichen Verluste nicht
frequenz des Umrichters von einer vollständig gelingt, muss der Strom Das Problem [16], [17] lässt sich umso
wesentlich höheren Frequenz über- gegenüber dem Betrieb direkt am leichter bewältigen, je kürzer die Ver-
lagert, die über eine Pulsweiten-Mo- Stromnetz etwas reduziert werden. bindung zwischen Umrichter und Motor
dulation gesteuert werden kann. Dies Wie erwähnt, lässt sich dieser Verlust ist. Deshalb besteht hier ein deutlicher
bedeutet, dass sich das Verhältnis von an Leistung oft mehr als ausgleichen, Vorteil für den „integrierten Antrieb“.
Einschaltzeit zu Ausschaltzeit kontinu- indem man den Motor am Umrichter
ierlich verändern lässt. Die Induktivität schneller laufen lässt, als er am 2.3.2 Der nachgerüstete Umrichter
der Motorwicklungen, so zu sagen die 50-Hz-Netz liefe. Prinzipiell lässt sich jeder Drehstrom-
aus dem Magnetfeld stammende Asynchronmotor, der bislang direkt am
„Trägheit“ des elektrischen Stroms, Der Wirkungsgrad eines modernen Netz angeschlossen war, nachträglich
„glättet“ den Strom, wenn man nicht Umrichters liegt typischerweise über mit einem Umrichter ausstatten. Prin-
so genau hinsieht, wieder bis irgend- 96 % und wird durch die Wirkungs- zipiell sollte man das auch tun, wo
wo in die Nähe eines Sinusstroms. grade der Leistungselektronikbauteile immer sich diese Maßnahme rechnet.
Praktisch hat es sich jedoch gezeigt,
dass die extrem schnellen Schaltzeiten
der Umrichter zu einem Nachschwin-
gen und Überschwingen der Spannung
in den Wicklungen des Motors führen,
was die Isolierung des Wicklungsdrahts
stärker beansprucht. Je besser ein Um-
richter ist, desto schärfer werden diese
zusätzlichen Anforderungen.
Die Hersteller der Motoren wirken dem
heute durch Einsatz von Doppellack-
draht, verstärkten Isolierungen und
anderen Maßnahmen entgegen.
Kommt es jedoch nach der Umrüstung
zu einem Schaden oder Ausfall an ei-
nem alten Motor, so bietet sich eine
Neubewicklung an, wobei die Repara-
Bild 11: Einfaches Umschalten nach Bild 8 oder Bild 10 ergibt rechteckförmige turwerkstatt auf die veränderten Ver-
Spannungsverläufe an den Spulen des Motors hältnisse hingewiesen werden muss.
8 | Deutsches Kupferinstitutrichter ermöglicht die Anpassung der
Drehzahl, aber nicht die Erzeugung ei-
ner so reinen Sinusspannung am Aus-
gang wie das Stromnetz sie bietet. Das
hat im Motor eine Erhöhung der Ver-
luste zur Folge, vor allem der Zusatz-
verluste.
Ganz nebenbei stellt das Duo aus
Stromrichter und „EFF1“-Motor bzw.
„IE2“-Motor gleich zwei weitere Bei-
spiele dafür dar, dass jedes Mal Kupfer
bzw. zusätzliches Kupfer im Spiel ist,
wenn elektrische Energie eingespart
werden soll und kann: Nach Schätzun-
gen des Deutschen Kupferinstituts und
der ERA enthält ein Stromrichter –
Glättungsdrosselspule, Entstördrossel-
Bild 12: Die Schaltung nach Bild 8 oder Bild 10 wird überlagert durch eine Pulsweitenmodulation
spulen, Sicherungen, Verbindungsma-
terial – etwa so viel Kupfer wie zu-
2.3.3 Nutzen des hohem Wirkungsgrad stellt oft die op- sätzlich benötigt wird, wenn ein ener-
Frequenzumrichters timale Auswahl dar, da der höhere gieeffizienter Motor statt eines Motors
Ökonomisch wie ökologisch wäre es Anteil „aktiven“ Materials im Motor mit veralteten Effizienzklassen, wie
sinnvoll, jeden zweiten neu installier- die Ausgangsparameter des Umrichters „EFF3“, verwendet werden soll. Der
ten Antrieb mit einer elektronischen verbessert. Die Schere zwischen „Spar- Einsatz „prozessangepasster“ Antriebs-
Drehzahlregelung zu versehen. In motor“ und „Billigmotor“ wird bei systeme, z. B. mit elektronischer Dreh-
Deutschland sind etwa 30 Mio. elektri- deren Betrieb am Umrichter größer als zahlregelung, optimiert den Pro-
sche Antriebe im Einsatz, die sinnvol- sie beim direkten Betrieb am Netz zessablauf und den daraus resultie-
lerweise mit Umrichtern nachzurüsten schon ist. Bei typischen Anwendungen renden Energiebedarf.
wären. Sicherlich eine Herausforde- wie Ventilatoren, Pumpen, Mühlen etc.
rung, deren Annahme sich rechnet! müssen oft Förderströme, Stoffmengen Wenn man bedenkt, dass der industri-
oder Druckwerte geändert werden, um elle Stromverbrauch zu mehr als der
„Ein Frequenzumrichter spart aber den Forderungen der jeweiligen tech- Hälfte auf Pumpenantriebe entfällt, so
mehr Energie ein als ein besserer Mo- nologischen Prozesse zu entsprechen. zeigt sich, wie wichtig eine elektroni-
tor!“: Dieses Argument hört man im- So werden Mengenreduzierungen, die sche Drehzahlregelung der Pumpenan-
mer wieder in der Diskussion um der Arbeits- und Ablaufprozess fordert, triebe für die Energieoptimierung ist.
„EFF1“-Motoren bzw. „IE2“-Motoren mit konventionellen Stellmethoden re- Dadurch entfällt zum einen der
und Kupferläufer, und das völlig zu alisiert (Drosselventile, Bypass-Systeme Druckabbau über ein Stellventil, zum
Recht. Man schreibt der Umstellung oder Dralleinrichtungen), was zu be- anderen werden die hohen Wirbelver-
der Motoren ein Sparpotenzial von achtlichen Energieverlusten führen luste auf ein Minimum reduziert.
1,3 % des gesamten Stromverbrauchs kann.
zu – vorausgesetzt, es würden in der
EU nur noch „EFF1“- Motoren bzw. Da Drehstrommotoren erst mit Einfüh-
„IE2“-Motoren eingesetzt. Das noch rung der Leistungselektronik über-
größere Sparpotenzial von 8 % ergibt haupt drehzahlverstellbar wurden, be-
sich zusätzlich aus dem konsequenten finden sich noch zahllose Antriebe im
Einsatz drehzahlveränderlicher Antrie- Einsatz, die im wahrsten Sinne des
be überall dort, wo dies in Frage Wortes mit der Bremse geregelt wer-
kommt. den. Ausgerechnet bei Lüftern und
Pumpen, die den größten Teil aller An-
Allerdings ist der Einsatz eines Umrich- triebe ausmachen und bei denen das
ters auch deutlich teurer als der Über- erforderliche Drehmoment mit dem
gang auf einen hocheffizienten Motor Quadrat der Drehzahl wächst – und
der Klasse „EFF1“ bzw. „IE2“. Die die Leistung also mit der dritten Po-
Amortisationsraten für beide Maßnah- tenz –, lässt man die Motoren vielfach
men liegen daher in der gleichen Grö- noch mit ihrer fixen Drehzahl laufen
ßenordnung, nämlich sehr kurz, im und drosselt mit Hähnen und Ventilen.
Extremfall unter einem Jahr. Die Kom- Hier bietet es sich an, das eine zu tun,
bination aus Umrichter und Motor mit ohne das andere zu lassen: Ein Strom-
Sparen mit dem Sparmotor |93 Die ersten Effizienzklassen
3.1 Entstehung / Historie CEMEP / für ein freiwilliges Maßnahmenbündel Mindest-Wirkungsgrad zuzuordnen
EU-Kommission – Abkommen eingesetzt, um die gewünschten Ener- (Bild 14), da größere Motoren aus
Die „Geburtsstunde“ der Energiespar- giesparpotenziale zu erzielen, aber ge- Gründen der Physik immer bessere
motoren reicht zurück bis in die spä- setzliche Regelungen zu vermeiden. Die Wirkungsgrade haben als kleinere. Auf
ten 1970er-Jahre (Ölkrise). Anfang der CEMEP [36] (Vertretung des Verbands der den Typenschildern sollten die Wir-
1990er-Jahre (Rio, Kyoto, Buenos Aires) nationalen Hersteller von Elektromoto- kungsgradklasse ausgewiesen (Bild 15)
ergaben statistische Erhebungen, dass ren in Europa) und die Europäische und zusätzliche Angaben in die Doku-
durch den Einsatz von Energiesparmo- Kommission haben hierbei ein Kenn- mentation aufgenommen werden.
toren und Drehzahlregelung mit Fre- zeichnungskonzept („EFF3“ bis „EFF1“) Hierbei wurde zwischen den Klassen
quenzumrichtern allein in Deutschland in Kombination mit einer freiwilligen „EFF3“, „EFF2“ und „EFF1“ unterschie-
folgende Ziele erreicht werden können Selbstverpflichtung zur Reduzierung des den. „EFF3“-Motoren entsprachen den
(Bild 13): Verkaufs von Motoren mit derzeit übli- damals üblichen Wirkungsgraden. Mit
chem Wirkungsgrad erarbeitet. Die „EFF2“ wurden die im Wirkungsgrad
• Reduktion des industriellen Hauptzielsetzungen waren damals: verbesserten Motoren und mit „EFF1“
Stromverbrauchs um über 9 %, die hocheffizienten Motoren bezeich-
• Einsparung mehrerer Mrd. Euro • Gesteigerter Kundennutzen durch net.
Energiekosten, Energiekosteneinsparung,
• Senkung der CO2-Emissionen • Markttransparenz für Kunden und An- In den Herstellerkatalogen wurden
aus fossilen Kraftwerken um wender, Wirkungsgradangaben bei Voll- und
mindestens 25 %. • Motorenwahl für den Anwender Dreiviertellast ausgewiesen. Das Mess-
erleichtern, verfahren zur Bestimmung des Wir-
Schon Mitte der 1990er-Jahre stellten • Bewahrung der Kundensouveränität, kungsgrads beruhte auf der Einzelver-
Kanada und die USA besondere Anfor- • Vermeidung langer Gesetzgebungs- lustmethode nach DIN EN 60034-2-1.
derungen an Motoren hinsichtlich de- prozesse.
ren Wirkungsgrade – gesetzlich gere- 31 europäische Unternehmen hatten
gelt und durch Subventionen gefördert Zwischen der CEMEP und der Europäi- das Abkommen bis zum 20.12.2000 un-
(EPAct). schen Kommission wurde vereinbart, terzeichnet und sich hierbei im Ver-
dass alle zwei- und vierpoligen Nie- trauen auf die Wirkung der neuen
3.2 Die ersten Wirkungsgradklassen derspannungs-Drehstrommotoren von Kennzeichnung verpflichtet, den Anteil
„EFF3“ bis „EFF1“ – politische und 1,1 kW bis 90 kW in Standardausfüh- ihrer „EFF3“-Motoren bis zum Ende
rechtliche Rahmenbedingungen rung entsprechend ihres Wirkungs- des Jahres 2003 um 50 % zu reduzie-
Die europäischen Hersteller hatten sich grads klassifiziert werden. Dazu war es ren. Die Einhaltung dieser Verpflich-
gegen Ende des vorigen Jahrhunderts erforderlich, jeder Baugröße einen tung wurde und wird mittels einer
Bild 13: Mehr als 50 % Energiesparpotenzial stecken in einem typischen industriellen Antriebsstrang
10 | Deutsches Kupferinstitutnach E DIN IEC 60034-2-3 (Einzelver-
lust-Additions-Methode). Das Abkom-
men und die Klassifizierung betrafen
ausschließlich oberflächengekühlte
Drehstrom-Asynchronmotoren, ausge-
legt für
• einen Leistungsbereich von 1,1 kW
bis 90 kW,
• zwei- oder vierpolige Drehzahlen
(1.500/min und 3.000/min),
• eine Netzspannung bzw. eine Be-
messungsspannung von 400 V,
• eine Netzfrequenz bzw. eine Bemes-
sungsfrequenz von 50 Hz,
• Betriebsart S1 (Dauerbetrieb).
Bei anderen Bemessungsdaten, wie
Bild 14: Definition der Wirkungsgradklassen gestern: EFF 1, EFF 2, EFF 3 und Messwerte
Polzahl, Frequenz, Leistung und Span-
zahlreicher Beispiel-Motoren nung sowie für explosionsgeschützte
Motoren wurde die „EFF“-Klassifizie-
jährlichen statistischen Überwachung Selbstverpflichtung erreicht. Folgende rung nicht angewendet!
gegenüber der Europäischen Kommis- Klassifizierungen wurden festgelegt
sion nachgewiesen. („EFF“-Klassifizierung): Wie wichtig eine derartige Kennzeich-
nung war, sieht man daran, wie stark
Ende der 1990er-Jahre haben dann in • EFF3: Motoren mit bisher auf dem die zahlreichen in Bild 14 mit aufge-
der Konsequenz auch die in der CEMEP Markt üblichen Wirkungsgraden (Mo- nommenen Beispielmotoren vonein-
vereinten Motorenhersteller und die toren mit niedrigem Wirkungsgrad), ander abweichen. Die besseren hätten
Europäische Kommission ein freiwilli- • EFF2: Motoren mit verbesserten Wir- zuvor als vermeintlich gleichwertige
ges Abkommen getroffen, das zum Ziel kungsgraden, Produkte neben den schlechteren in
hatte, den Marktanteil von Drehstrom- • EFF1: hocheffiziente Motoren (Moto- Katalogen der Händler gestanden und
Motoren mit bisher üblichen Wir- ren mit erhöhtem Wirkungsgrad). im Regal gelegen, wo sie liegen ge-
kungsgraden („EFF3“) bis Ende 2003 blieben wären.
auf unter 50 % zu senken. Diese Ziel- Für die Klassen EFF2 und EFF1 wurden
vorgabe wurde ohne gesetzliche Vor- Mindestwirkungsgrade vorgegeben. Die Motoren oberhalb der oberen Linie von
schriften und nur durch die Hersteller- Ermittlung der Wirkungsgrade erfolgt Bild 14 fielen in Klasse „EFF1“, was bis
dahin als „Energiesparmotor“ bezeich-
net wurde. Zwischen der oberen und
der unteren Linie lagen die im Wir-
kungsgrad verbesserten Motoren der
Klasse „EFF2“ und unterhalb der unte-
ren Linie die bisherigen Standard-Mo-
toren der Klasse „EFF3“. Diese Be-
zeichnungen und die entsprechenden
Logos waren laut Selbstverpflichtung
auf den Motoren anzubringen.
Der Hauptunterschied zwischen den
beiden Wirkungsgrad-Klassifizierungen
EFF und IE liegt im Verfahren zu deren
Ermittlung. Beim direkten Vergleich am
selben Motor ist davon auszugehen,
dass sich der nach den neuen Mess-
verfahren ermittelte Wirkungsgrad re-
duziert. So ist z. B. ein vierpoliger
EFF1-Motor von 11 kW mit einem Wir-
kungsgrad von 91,0 % physikalisch
Bild 15: Kennzeichnung heute: Dieser Motor muss als Ex-Ausführung weder die alten noch die identisch mit einem IE2-Motor und
neuen Bedingungen erfüllen, trägt aber dennoch eine IE-Klassifizierung auf freiwilliger Basis dem Wirkungsgrad 89,8 % [24].
Sparen mit dem Sparmotor | 114 Die gültigen Effizienzklassen
Motorenwirkungsgrad-Klassifi- Terminen müssen daher die Effizienz- 4.1 Übersicht der
zierungsschema (MEPS) nach klassen MEPS realisiert sein: „MEPS“-Wirkungsgrade
DIN EN 60034-30 In Deutschland war es Ziel der neu ge-
Doch waren der Bereich von 1,1 kW bis • IE2 seit 16.06.2011, schaffenen Norm DIN EN 60034-30,
90 kW und die Beschränkung auf • IE3 ab 01.01.2015 für Motoren 7,5 kW Wirkungsgradklassen weltweit zu
zweipolige und vierpolige Motoren mit bis 375 kW, (oder IE2 + Frequenzum- harmonisieren, denn die Verbesserung
einer Bemessungsfrequenz von 50 Hz richter), des Wirkungsgrads des gesamten An-
alles Andere als umfassend. Auch war • IE3 ab 01.01.2017 alle Leistungsberei- triebssystems (d. h. Motor und Fre-
das Schema von oben „gedeckelt“, che (oder IE2 + Frequenzumrichter). quenzumrichter) zuzüglich der Appli-
denn was sollte nach weiterem tech- Des Weiteren legte die Europäische kation (oder des Prozesses) ist ein we-
nischen Fortschritt folgen? Eine Klasse Kommission mit Datum 27. März 2009 sentlicher Faktor bei den Bemühungen
„EFF 0“? „EFF 1 super“? „EFF 1 extra“? bindend fest, dass die „minimale“ zur Energieeinsparung. Das gesamte
Und was danach? Effizienzklasse IE1 zu folgenden Einsparungspotenzial eines optimier-
Terminen für alle Umwälzpumpen ten Systems liegt typisch bei rund 30
So trafen die EU-Mitgliedstaaten am angewandt werden muss: % bis 60 %. Elektrische Motoren mit
11. März 2009 eine neue Regelung mit verbessertem Wirkungsgrad in Kombi-
einem neuen Klassifizierungsschema • IE1 ab 0,27 kW, ab 01.01.2013, nation mit Frequenzumrichtern kön-
für Motorwirkungsgrade (MEPS – Mini- • IE1 ab 0,23 kW, ab 01.01.2015. nen rund 7 % der weltweit verbrauch-
mum Energy-Efficiency Performance ten elektrischen Energie einsparen. Et-
Standard) von zwei- bis sechspoligen In DIN EN 60034-30 sind die Wirkungs- wa ein Viertel bis ein Drittel dieser
Industrie-Normmotoren der Leistungs- gradklassen für Drehfeldmotoren mit Einsparungen ist auf den verbesserten
klassen 0,75 kW bis 375 kW für 50 Hz Käfigläufer, ausgenommen polum- Wirkungsgrad des Motors zurückzufüh-
und 60 Hz, so dass sich diese Grenz- schaltbare Motoren, definiert und ren. Der restliche Anteil resultiert aus
werte auch auf nordamerikanische auch Prüfverfahren festgelegt. der Verbesserung des Antriebssystems.
Motoren anwenden lassen. Mit dieser
Verordnung hofft man, bis zum Jahr Nun stellt die Baureihe „IE1“ das unte- Zur Information werden im Anhang A
2020 den Stromverbrauch in der re Ende der Skala dar. Nichts und nie- des Entwurfs von E DIN IEC 60034-31
EU-27 um den derzeitigen Verbrauch mand behindert die Einführung einer Grenzen für die Nennwerte des Super-
Schwedens reduzieren zu können. zukünftigen Klasse „IE5“ – und schon Premium-Wirkungsgrads angegeben.
spricht der neue Entwurf zur VDE Im Gegensatz zu den Effizienzklassen
Im Vergleich zum Szenario mit unver- 0530-30 DIN EN 60034-30 von IE5 als IE1 bis IE3 ist die Effizienzklasse IE4
änderten Rahmenbedingungen sind „vorgesehen für die nächste Ausgabe (Super-Premium-Wirkungsgrad) nicht
Energieeinsparungen in der Größen- dieser Norm“! Die Bestimmung des beschränkt auf Asynchron-Drehstrom-
ordnung von rund 158 TWh/a zu er- Wirkungsgrads von Antrieben (Motor motoren. Die hier vorgegebenen Wir-
warten. Das entspricht einer Reduzie- und Umrichter) für veränderliche Dreh- kungsgrade können auch mit anderen
rung der jährlichen CO2-Emission von zahl wird in E DIN IEC 60034-2-3 auf- Elektromotoren erreicht werden, zum
etwa 74 Mio. Tonnen! Zu folgenden genommen. Beispiel Synchronmotoren mit Perma-
nentmagneten. Es ist jedoch zu be-
rücksichtigen, dass hierzu ein Fre-
quenzumrichter erforderlich ist, der
zusätzliche Verluste einbringt (Ab-
schnitt 4.1).
Da die Netzfrequenz und die Polzahl
umrichtergespeister Motoren in keinem
unmittelbaren Zusammenhang zur
Drehzahl dieser Motoren stehen, wer-
den diese üblicherweise für einen
Drehzahlbereich bemessen und durch
das Drehmoment und nicht durch die
Leistung gekennzeichnet. Folglich wer-
den die Grenzen für IE4 nach dem
Drehmoment sortiert und für diskrete
Drehzahlbereiche benannt.
Verbesserte Technologien ermöglichen
den Herstellern die Bemessung von
Motoren dieser Wirkungsgradklasse mit
Bild 16: Wirkungsgradkurven (IE-Code) mechanischen Abmessungen (Flansche,
12 | Deutsches KupferinstitutWellenhöhen usw.), die denen beste- 4.2.1 Doppelt gespeiste Synchron- merwerke mit einem sechspoligen
hender Motoren geringerer Wirkungs- maschinen Synchronmotor und einem zweipoligen
gradklassen vergleichbar sind (siehe Eine klassische Synchronmaschine ver- Synchrongenerator funktioniert so
EN 50347, NEMA MG1 und andere natio- fügt über eine übliche dreiphasige nicht mehr; es muss ein doppelt ge-
nale Normen). Ständerwicklung und eine mit Gleich- speister Drehstrommotor zum Einsatz
strom erregte Läuferwicklung. Für den kommen. Allerdings steht auch diese
Anmerkung: Die Bestimmung des Wir- Läufer reicht damit eine einzige (zwei- Technik kurz vor dem Aussterben,
kungsgrads umrichtergespeister Moto- polige / „einphasige“) Wicklung aus, denn während die Eigen-Erzeugung
ren kann praktisch nur durch das di- so etwa in gängigen Kraftwerksgenera- bei der DB Energie zurück geht und die
rekte Verfahren der Messung von Ein- toren. Man kann die Erregerwicklung Speisung aus dem Drehstromnetz stark
gangs-/Ausgangsleistung erfolgen, weil jedoch auch dreiphasig aufbauen. Dies zunimmt, geschieht dies heute selbst-
alle Einzelverlustverfahren sinusförmi- bietet die Möglichkeit, diese Wicklung verständlich zusehends mehr mit sta-
ge Spannung, feste Frequenz und feste – wiederum über einen Umrichter – tischen elektronischen Umrichtern, die
Bemessungsspannung erfordern. mit einem Drehstrom sehr niedriger die Umformerwerke in den so genann-
Frequenz zu erregen, so zu sagen mit ten Bahn-Unterwerken ersetzen.
Deshalb besitzt der so bestimmte einem Gleichstrom, oder besser gesagt
Wirkungsgrad eine ziemlich hohe drei Gleichströmen, die sich kontinu- Die Technik des doppelt gespeisten
Unsicherheit, insbesondere bei sehr ierlich verändern und auch ihre Pola- Antriebs bedarf also aus heutiger Sicht
hohen Wirkungsgraden (vergleiche ritäten wechseln. So bildet auch der nicht mehr der besonderen Aufmerk-
auch E DIN IEC 60034-2-3). Läufer ein Drehfeld aus, das sich zu- samkeit.
dem nach Belieben umkehren lässt.
Es ist weder erforderlich, den Motor Die Ständerwicklung wird bei dieser 4.2.2 Permanentmagnet-Synchron-
für den gesamten Drehzahlbereich von Konfiguration üblicherweise direkt am motoren
801/min bis 3.600/min zu bemessen, Drehstromnetz betrieben, und durch Einen aufkommenden, wenn auch
noch ist eine Konstant-Drehmoment- die flexible Speisung des Läufers lässt vielfach überschätzten Markt stellen
bemessung über den gesamten sich die Drehzahl wahlweise etwas ab- dagegen Synchronmotoren mit Perma-
Bemessungsdrehzahlbereich not- senken oder etwas über die Synchron- nentmagnet-Läufern dar. Abhängig
wendig. Um die Austauschbarkeit mit drehzahl hinaus fahren. Dieses Prinzip von der Menge des eingesetzten Mag-
netzbetriebenen Motoren für eine kommt dort zur Anwendung, wo bei netmaterials kann ein Permanentmag-
Drehzahl aufrecht zu erhalten, ist aus Maschinen großer Leistung nur eine net-erregter Motor einen höheren
E DIN IEC 60034-31 die Umrechnungs- begrenzte Veränderung der Drehzahl Leistungsfaktor besitzen als ein Induk-
tabelle A.3 von Drehmoment und erforderlich ist. Eine klassische An- tionsmotor und dadurch den Wir-
Drehzahl auf genormte Leistungspegel wendung sind Windkraftanlagen, doch kungsgrad des Verteilungsnetzes und
wiedergegeben (Tabelle 3). befindet sich das Verfahren hier schon des Frequenzumrichters verbessern.
wieder auf dem Rückzug. Sein Vorteil
Anmerkungen aus E DIN IEC 60034-31 besteht darin, dass der Umrichter nicht So jedenfalls wird gelegentlich argu-
Das erhaltene Drehmoment muss zu für die gesamte Nennleistung der Ma- mentiert, doch der Vorteil nimmt sich
dem nächsten Wert der R10-Reihe be- schine, sondern nur für die Drehzahl- etwas dünn aus, wenn man bedenkt,
vorzugter Zahlen gerundet werden, Differenz, die Schlupfleistung, bemes- wie einfach sich die zur Erregung eines
siehe ISO 3. Für vereinfachte Anwen- sen werden muss. Die Nachteile ent- Asynchronmotors erforderliche Blind-
dung gibt Tabelle A.3 die Standardleis- sprechen denjenigen der klassischen leistung mittels Kompensations-Kon-
tungen zugehörig zu den Drehmomen- elektrisch erregten Synchronmaschine: densatoren bereit stellen lässt. Biswei-
ten von Tabelle A.2 an. Es werden Schleifringe erforderlich, len werden diese Kondensatoren di-
und das sind Verschleißteile. Mittler- rekt am Motor oder in unmittelbarer
Zur vereinfachten Anwendung auf be- weile sind die Kosten für große Um- Nähe angebracht und also mit diesem
stimmte Motorgrößen können die richter schon wieder so weit gefallen, parallel geschaltet: Ist der Motor aus,
Nenngrenzen von Tabelle A.2 (hier Ta- dass sich die Inkaufnahme des War- so ist auch die Kapazität vom Netz ge-
belle 4) angewandt werden. tungsaufwands nicht mehr lohnt, trennt, die anderenfalls zu einer Über-
schon gar nicht etwa bei Windkraftan- kompensation und somit zum Gegen-
4.2 Nicht erfasste Motoren lagen auf hoher See. teil, zu einer zusätzlichen Belastung
Synchronmotoren mit Dauermagnet- statt zu einer Entlastung des Netzes,
Erregung und Reluktanzmotoren sowie Eine andere Anwendung des Prinzips führen könnte. Doch auch ohne dies
Kombinationen dieser Bauformen besteht bei der Bahnstrom-Versorgung entfaltet die Kompensation – man
wurden bereits entwickelt und sind für aus dem öffentlichen Netz. Seit die kann nicht oft genug darauf hinweisen
bestimmte Anwendungen auf dem Frequenz des Einphasen-Bahnstrom- – nur dann ihre volle Wirksamkeit,
Markt erhältlich. Man darf jedoch kei- netzes von 162/3 Hz auf 16,7 Hz ange- wenn sie in unmittelbarer Nähe der
ne Wunder – und auch nicht die bal- hoben wurde, läuft dieses Netz nicht Entstehung der zu kompensierenden
dige Ablösung des asynchronen Dreh- mehr synchron zum öffentlichen Dreh- Blindleistung stattfindet. Dann aber ist
strommotors – erwarten. stromnetz. Die Speisung über Umfor- das Argument der geringen Blindleis-
Sparen mit dem Sparmotor | 13Mindest-Wirkungsgrade für Drehstrom-Asynchronmotoren nach DIN EN 60034-30 (VDE 0530-30):2009-08
Klasse IE1 IE2
Polzahl 2-pol 4-pol 6-pol 2-pol 4-pol 6-pol
Nenn-
50 Hz 60 Hz 50 Hz 60 Hz 50 Hz 60 Hz 50 Hz 60 Hz 50 Hz 60 Hz 50 Hz 60 Hz
Frequenz
0,75 kW 72,1 % 77,0 % 72,1 % 78,0 % 70,0 % 73,0 % 77,4 % 75,5 % 79,6 % 82,5 % 75,9 % 80,0 %
1,10 kW 75,0 % 78,5 % 75,0 % 79,0 % 72,9 % 75,0 % 79,6 % 82,5 % 81,4 % 84,0 % 78,1 % 85,5 %
1,50 kW 77,2 % 81,0 % 77,2 % 81,5 % 75,2 % 77,0 % 81,3 % 84,0 % 82,8 % 84,0 % 79,8 % 86,5 %
2,20 kW 79,7 % 81,5 % 79,7 % 83,0 % 77,7 % 78,5 % 83,2 % 85,5 % 84,3 % 87,5 % 81,8 % 87,5 %
3,00 kW 81,5 % 81,5 % 79,7 % 84,6 % 85,5 % 83,1 %
3,70 kW 84,5 % 85,0 % 83,5 % 87,5 % 87,5 % 87,5 %
4,00 kW 83,1 % 83,1 % 81,4 % 85,8 % 86,6 % 84,6 %
5,50 kW 84,7 % 86,0 % 84,7 % 87,0 % 83,1 % 85,0 % 87,0 % 88,5 % 87,7 % 89,5 % 86,0 % 89,5 %
7,50 kW 86,0 % 87,5 % 86,0 % 87,5 % 84,7 % 86,0 % 88,1 % 89,5 % 88,7 % 89,5 % 87,2 % 89,5 %
11,00 kW 87,6 % 87,5 % 87,6 % 88,5 % 86,4 % 89,0 % 89,4 % 90,2 % 89,8 % 91,0 % 88,7 % 90,2 %
15,00 kW 88,7 % 88,5 % 88,7 % 89,5 % 87,7 % 89,5 % 90,3 % 90,2 % 90,6 % 91,0 % 89,7 % 90,2 %
18,50 kW 89,3 % 89,5 % 89,3 % 90,5 % 88,6 % 90,2 % 90,9 % 91,0 % 91,2 % 92,4 % 90,4 % 91,7 %
22,00 kW 89,9 % 89,5 % 89,9 % 91,0 % 89,2 % 91,0 % 91,3 % 91,0 % 91,6 % 92,4 % 90,9 % 91,7 %
30,00 kW 90,7 % 90,2 % 90,7 % 91,7 % 90,2 % 91,7 % 92,0 % 91,7 % 92,3 % 93,0 % 91,7 % 93,0 %
37,00 kW 91,2 % 91,5 % 91,2 % 92,4 % 90,8 % 91,7 % 92,5 % 92,4 % 92,7 % 93,0 % 92,2 % 93,0 %
45,00 kW 91,7 % 91,7 % 91,7 % 93,0 % 91,4 % 91,7 % 92,9 % 93,0 % 93,1 % 93,6 % 92,7 % 93,6 %
55,00 kW 92,1 % 92,4 % 92,1 % 93,3 % 91,9 % 92,1 % 93,2 % 93,0 % 93,5 % 94,1 % 93,1 % 93,6 %
75,00 kW 92,7 % 93,0 % 92,7 % 93,2 % 92,6 % 93,0 % 93,8 % 93,6 % 94,0 % 94,5 % 93,7 % 94,1 %
90,00 kW 93,0 % 93,0 % 93,0 % 93,2 % 92,9 % 93,0 % 94,1 % 94,5 % 94,2 % 94,5 % 94,0 % 94,1 %
110,00 kW 93,3 % 93,0 % 93,3 % 93,5 % 93,3 % 94,1 % 94,3 % 94,5 % 94,5 % 95,0 % 94,3 % 95,0 %
132,00 kW 93,5 % 93,5 % 93,5 % 94,6 % 94,7 % 94,6 %
150,00 kW 94,1 % 94,5 % 94,1 % 95,0 % 95,0 % 95,0 %
160,00 kW 93,8 % 93,8 % 93,8 % 94,8 % 94,9 % 94,8 %
185,00 kW 94,1 % 94,5 % 94,1 % 95,4 % 95,4 % 95,0 %
200,00 kW 94,0 % 94,0 % 94,0 % 95,0 % 95,1 % 95,0 %
250,00 kW 94,0 % 94,0 % 94,0 % 95,0 % 95,1 % 95,0 %
315,00 kW 94,0 % 94,0 % 94,0 % 95,0 % 95,1 % 95,0 %
355,00 kW 94,0 % 94,0 % 94,0 % 95,0 % 95,1 % 95,0 %
375,00 kW 94,0% 94,0% 94,0% 95,0% 95,1% 95,0%
Diese Zahlenwerte wurden aus NEMA MG1 übernommen. Es handelt sich nicht um Schreibfehler
Der Wirkungsgrad für „Energy Efficiency“ wird im NEMA Standard festgelegt auf 95,0 % bei 185 kW und 95,8 % bei 375 kW
Tabelle 2 a: Nominale Grenzwerte (in %) für Standard-Wirkungsgrad (IE1)
tung beim Synchronmotor keines ein Läufer-Lagegeber (Encoder) erfor- • geringeres Bauvolumen und Ge-
mehr, denn der Aufpreis für die Mag- derlich – es sei denn, es wird ein wicht, daher interessant als Fahr-
nete ist deutlich höher als der Preis für lagegeberfreier Regelalgorithmus des zeugantrieb.
drei Kondensatoren. Umrichters eingesetzt, was mit ent-
sprechendem Mehraufwand immerhin Insbesondere denkt man hierbei an
Doch wie erwähnt, laufen diese Moto- möglich ist. das Elektroauto. Unabhängig davon,
ren nicht von selbst an, wenn sie an ob es hierzu kommt, was auch be-
das Drehstromnetz geschaltet werden, Auch ist darauf zu achten, dass eine zweifelt werden darf [18], muss bei
und erfordern für eine einwandfreie Kuh nicht gleichzeitig gemolken und Äußerungen wie „größeres Drehmo-
Betriebsweise also einen Frequenzum- geschlachtet werden kann. Wiederholt ment“ immer die Frage gestellt wer-
richter, der zudem über eine Pulswei- liest man in der Fachpresse, die Vor- den, worauf der Vergleich denn nun
tenmodulation der Spannung mit teile des Permanentmagnet-Motors abzielt:
hoher Schaltfrequenz (üblicherweise seien
4 kHz und darüber) verfügen muss, • Ist die Baugröße gemeint – „größe-
sonst entstehen Wirbelstromverluste • größeres Drehmoment, daher könne res Drehmoment als ein gleich großer /
im Läufer (s. u.). Darüber hinaus ist oftmals ein Getriebe entfallen, und gleich schwerer Asynchronmotor“,
14 | Deutsches KupferinstitutMindest-Wirkungsgrade für Drehstrom-Asynchronmotoren nach DIN EN 60034-30 (VDE 0530-30):2009-08
Klasse IE3 IE4
Polzahl 2-pol 4-pol 6-pol 2-pol 4-pol 6-pol
Nenn-
50 Hz 60 Hz 50 Hz 60 Hz 50 Hz 60 Hz 50 Hz 50 Hz 50 Hz
Frequenz
0,75 kW 80,7 % 77,0 % 82,5 % 85,5 % 78,9 % 82,5 % 84,9 % 85,6 % 83,1 %
1,10 kW 82,7 % 84,0 % 84,1 % 86,5 % 81,0 % 87,5 % 86,7 % 87,4 % 84,1 %
1,50 kW 84,2 % 85,5 % 85,3 % 86,5 % 82,5 % 88,5 % 87,5 % 88,1 % 86,2 %
2,20 kW 85,9 % 86,5 % 86,7 % 89,5 % 84,3 % 89,5 % 89,1 % 89,7 % 87,1 %
3,00 kW 87,1 % 87,7 % 85,6 % 89,7 % 90,3 % 88,7 %
3,70 kW 88,5 % 89,5 % 89,5 %
4,00 kW 88,1 % 88,6 % 86,8 % 90,3 % 90,9 % 89,5 %
5,50 kW 89,2 % 89,5 % 89,6 % 91,7 % 88,0 % 91,0 % 91,5 % 92,1 % 90,2 %
7,50 kW 90,1 % 90,2 % 90,4 % 91,7 % 89,1 % 91,0 % 92,1 % 92,6 % 91,5 %
11,00 kW 91,2 % 91,0 % 91,4 % 92,4 % 90,3 % 91,7 % 93,0 % 93,6 % 92,5 %
15,00 kW 91,9 % 91,0 % 92,1 % 93,0 % 91,2 % 91,7 % 93,4 % 94,0 % 93,1 %
18,50 kW 92,4 % 91,7 % 92,6 % 93,6 % 91,7 % 93,0 % 93,8 % 94,3 % 93,5 %
22,00 kW 92,7 % 91,7 % 93,0 % 93,6 % 92,2 % 93,0 % 94,2 % 94,7 % 93,9 %
30,00 kW 93,3 % 92,4 % 93,6 % 94,1 % 92,9 % 94,1 % 94,5 % 95,0 % 94,3 %
37,00 kW 93,7 % 93,0 % 93,9 % 94,5 % 93,3 % 94,1 % 94,8 % 95,3 % 94,6 %
45,00 kW 94,0 % 93,6 % 94,2 % 95,0 % 93,7 % 94,5 % 95,1 % 95,6 % 94,9 %
55,00 kW 94,3 % 93,6 % 94,6 % 95,4 % 94,1 % 94,5 % 95,4 % 95,8 % 95,2 %
75,00 kW 94,7 % 94,1 % 95,0 % 95,4 % 94,6 % 95,0 % 95,6 % 96,0 % 95,4 %
90,00 kW 95,0 % 95,0 % 95,2 % 95,4 % 94,9 % 95,0 % 95,8 % 96,2 % 95,6 %
110,00 kW 95,2 % 95,0 % 95,4 % 95,8 % 95,1 % 95,8 % 96,0 % 96,4 % 95,6 %
132,00 kW 95,4 % 95,6 % 95,4 % 96,0 % 96,5 % 95,8 %
150,00 kW 95,4 % 96,2 % 95,8 %
160,00 kW 95,6 % 95,8 % 95,6 % 96,2 % 96,5 % 96,0 %
185,00 kW 95,8 % 96,2 % 95,8 %
200,00 kW 95,8 % 96,0 % 95,8 % 96,3 % 96,6 % 96,1 %
250,00 kW 95,8 % 96,0 % 95,8 % 96,4 % 96,7 % 96,1 %
315,00 kW 95,8 % 96,0 % 95,8 % 96,5 % 96,8 % 96,1 %
355,00 kW 95,8 % 96,0 % 95,8 % 96,6 % 96,8 % 96,1 %
375,00 kW 95,8 % 96,0 % 95,8 % 96,6 % 96,8 % 96,1 %
Diese Zahlenwerte wurden aus NEMA MG1 übernommen. Es handelt sich nicht um Schreibfehler
Der Wirkungsgrad für „Energy Efficiency“ wird im NEMA Standard festgelegt auf 95,0 % bei 185 kW und 95,8 % bei 375 kW
Tabelle 2 b: Nominale Grenzwerte (in %) für Standard-Wirkungsgrad (IE1)
dann sind die beiden Aussagen iden- ge. Der Verzicht auf ein Getriebe dank tor schnell laufen, und das Getriebe
tisch und fallen zu einer zusammen. hohen Drehmoments bedeutet alle- muss bleiben. Beide Vorteile im Dop-
mal, dass der Motor in dem betreffen- pelpack gibt es nicht.
• Bezieht sich der Vergleich auf die den Anwendungsfall sehr langsam
Bemessungsleistung, so ist beim je- läuft, viel langsamer als er bauartbe- Als weiterer, im Zusammenhang dieser
weiligen Synchronmotor die Drehzahl dingt könnte, und daher nur einen Broschüre besonders interessierender
im gleichen Verhältnis niedriger wie Bruchteil der Leistung abgibt, die von Vorteil wird der höhere Wirkungsgrad
das Drehmoment höher ist als beim der betreffenden Baugröße eigentlich des Permanentmagnet-Motors ange-
hierdurch ersetzten Asynchron-Getrie- erwartet werden könnte. Der Motor führt. Oft kann dadurch auch auf die
bemotor – sonst wäre die Bemes- wird also bei weitem nicht „ausge- Eigen- oder Fremdbelüftung eines Mo-
sungsleistung eben nicht die gleiche! nutzt“ und wird daher eher größer tors verzichtet werden. Die hieraus re-
und schwerer sein als ein schnell lau- sultierende Geräuschminderung stellt
In den genannten Darstellungen wird fender Asynchronmotor mit Getriebe. einen weiteren Vorteil dar. Drehstrom-
der Bezug jedoch niemals angegeben. Um den Vorteil bei Masse und Volumen Asynchronmotoren haben nämlich,
Damit sind derartige Darstellungen – etwa 30 % werden meist angegeben bedingt durch ihr Funktionsprinzip,
und Vergleiche ohne Wert und Aussa- – ausnutzen zu können, muss der Mo- Läuferverluste, die durch die induzier-
Sparen mit dem Sparmotor | 15Sie können auch lesen