ST 151 S-DIAS Schrittmotor-Endstufe - Betriebsanleitung - SIGMATEK
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

ST 151
S-DIAS Schrittmotor-Endstufe
Betriebsanleitung
Erstellungsdatum: 23.10.2017 Versionsdatum: 17.09.2021 Artikelnummer: 20-014-151-D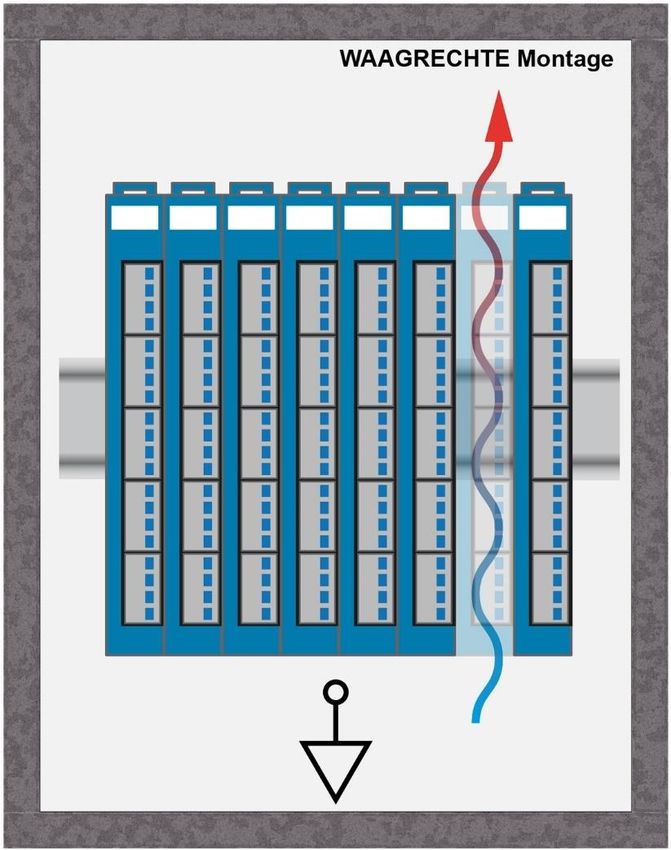
Herausgeber: SIGMATEK GmbH & Co KG
A-5112 Lamprechtshausen
Tel.: +43/6274/4321
Fax: +43/6274/4321-18
Email: office@sigmatek.at
WWW.SIGMATEK-AUTOMATION.COM
Copyright © 2017
SIGMATEK GmbH & Co KG
Originalsprache
Alle Rechte vorbehalten. Kein Teil des Werkes darf in irgendeiner Form (Druck, Fotokopie, Mikrofilm oder in einem
anderen Verfahren) ohne ausdrückliche Genehmigung reproduziert oder unter Verwendung elektronischer Systeme
verarbeitet, vervielfältigt oder verbreitet werden.
Inhaltliche Änderungen behalten wir uns ohne Ankündigung vor. Die SIGMATEK GmbH & Co KG haftet nicht für
technische oder drucktechnische Fehler in diesem Handbuch und übernimmt keine Haftung für Schäden, die auf die
Nutzung dieses Handbuches zurückzuführen sind.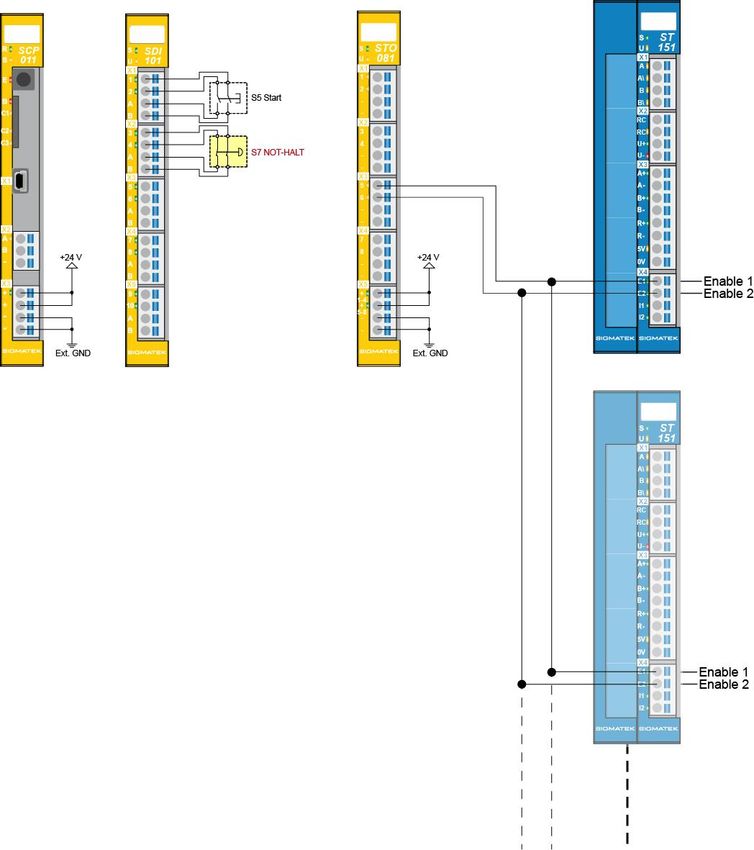
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
S-DIAS Schrittmotor-Endstufe ST 151
mit 1 Schrittmotorendstufe 50 V/5 A
1 Bremschopper
1 Inkrementalgebereingang RS422/TTL umschaltbar
2 Enable-Eingängen +24 V/3,2 mA/0,5 ms mit
STO Funktionalität
2 Latch-/Digitaleingängen +24 V/3,7 mA/10 µs
An der S-DIAS Schrittmotor-Endstufe können 2-phasige Schritt-
motoren mit bis zu 5 A Phasenstrom angeschlossen werden. Im
Standard Schrittfrequenzmodus werden die Betriebsmöglichkei-
ten Vollschritt, Halbschritt und Mikroschritt (bis zu 64-fach) unter-
stützt.
Der integrierte Bremschopper bietet die Anschlussmöglichkeit für
einen externen Bremswiderstand mit dem die überschüssige
Energie, die bei Bremsvorgängen des Motors entsteht und in die
Motorversorgung zurückgespeist wird, abgebaut werden kann.
Zur Positionsrückmeldung steht ein Inkrementalgebereingang zur
Verfügung, der sowohl RS422- als auch TTL-Geber unterstützt.
Mit den beiden Enable-Eingängen wird die Sicherheitsfunktionalität STO umgesetzt.
Die 2 Latch-/Digitaleingänge sind für die Referenzfahrt und zur Überwachung der Endlagen
vorgesehen.
17.09.2021 Seite 1
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
Inhaltsverzeichnis
1 Grundlegende Sicherheitshinweise ...................................... 6
1.1 Allgemeine Informationen zur Sicherheit ................................... 6
1.2 Weitere Sicherheitshinweise ....................................................... 7
1.3 Allgemeine Anforderungen.......................................................... 8
2 Konformität mit EU-Richtlinien.............................................10
2.1 Normen zur funktionalen Sicherheit ......................................... 10
2.2 EU-Konformitätserklärung ......................................................... 10
2.3 Sicherheitsrelevante Kenngrößen ............................................ 10
3 Technische Daten ..................................................................11
3.1 Spezifikation Schrittmotorausgang .......................................... 11
3.2 Spezifikation Bremschopper ..................................................... 12
3.3 Spezifikation Inkrementalgebereingang ................................... 12
3.4 Spezifikation Enable Eingänge für STO ................................... 13
3.5 Spezifikation Latch-/Digitaleingänge ........................................ 13
3.6 Elektrische Anforderungen........................................................ 14
3.7 Sonstiges ..................................................................................... 16
3.8 Umgebungsbedingungen .......................................................... 16
4 Mechanische Abmessungen.................................................17
5 Anschlussbelegung ...............................................................18
5.1 Status-LEDs................................................................................. 19
5.2 Zu verwendende Steckverbinder .............................................. 20
Seite 2 17.09.2021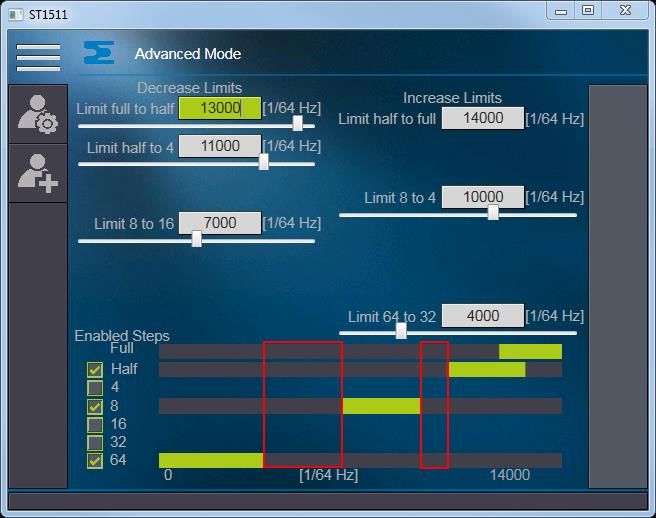
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
5.3 Beschriftungsfeld ....................................................................... 21
6 Verdrahtung ........................................................................... 22
6.1 Anschlussbeispiel ...................................................................... 22
6.2 Hinweise ...................................................................................... 23
7 Funktionsbeschreibung ........................................................ 24
7.1 Betriebsmodi Schrittmotorendstufe ......................................... 24
7.1.1 Vollschrittbetrieb ............................................................................... 24
7.1.2 Halbschrittbetrieb .............................................................................. 24
7.1.3 Mikroschrittbetrieb ............................................................................. 25
7.2 Stromregelung Schrittmotor ...................................................... 26
7.3 Inkrementalgeber ........................................................................ 28
7.3.1 Signalverlauf “Count UP” .................................................................. 28
7.3.2 Signalverlauf “Count DOWN” ............................................................ 28
7.3.3 Signalverlauf “Referenzimpuls (Zero Position)”................................. 28
7.3.4 Latch-Funktion .................................................................................. 29
8 Zusätzliche Sicherheitshinweise ......................................... 30
8.1 STO ............................................................................................... 31
8.2 Funktionsweise ........................................................................... 32
8.3 Funktionsprüfung ....................................................................... 32
9 Anschlussbeispiele ............................................................... 33
9.1 Performance Level e, Kategorie 4 bzw. SIL 3 – Safety-SPS ... 33
9.2 Performance Level e, Kategorie 3 & SIL 3 – Safety-SPS ........ 35
17.09.2021 Seite 3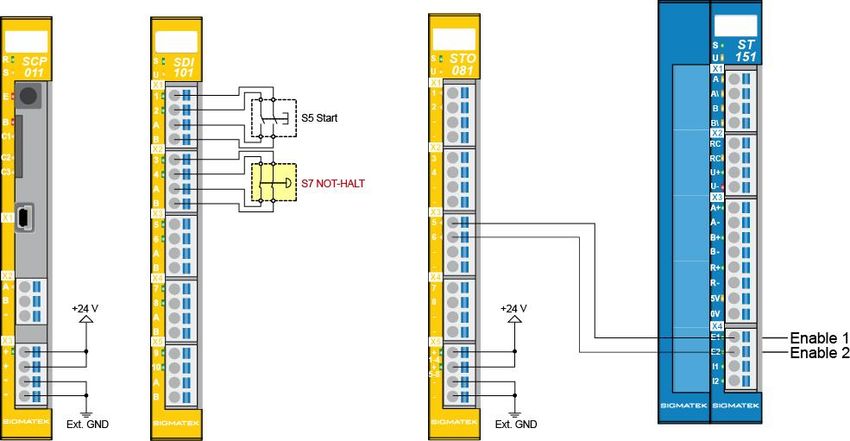
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
9.3 Performance Level e, Kategorie 4 bzw. SIL 3 – Konventionell
...................................................................................................... 37
9.4 Performance Level d, Kategorie 2 bzw. SIL 2 – Konventionell
...................................................................................................... 39
10 Montage ..................................................................................41
11 Entsorgung.............................................................................42
12 Hardwareklasse ST151 ..........................................................43
12.2 Allgemein ..................................................................................... 46
12.3 Inkremental Encoder .................................................................. 47
12.4 Digitale Eingänge 1 und 2 .......................................................... 48
12.5 Stepper Motor ............................................................................. 49
12.6 Asynchrone Werte ...................................................................... 53
12.6.1 Kommunikations-Schnittstellen.......................................................... 54
12.7 Globale Methoden ....................................................................... 55
12.7.1 StartMeasure ..................................................................................... 55
12.7.2 GetMeasureState .............................................................................. 56
12.8 Interne Eigenheiten .................................................................... 56
12.8.1 Visual Object View ............................................................................. 56
12.8.2 Default Mode ..................................................................................... 57
12.8.3 Advanced Mode................................................................................. 58
12.8.4 Adaptives Microstepping.................................................................... 59
12.8.5 Übernehmen von Initalwerten ............................................................ 62
12.8.6 Latchen .............................................................................................. 62
12.8.7 Current Increase ................................................................................ 63
Seite 4 17.09.2021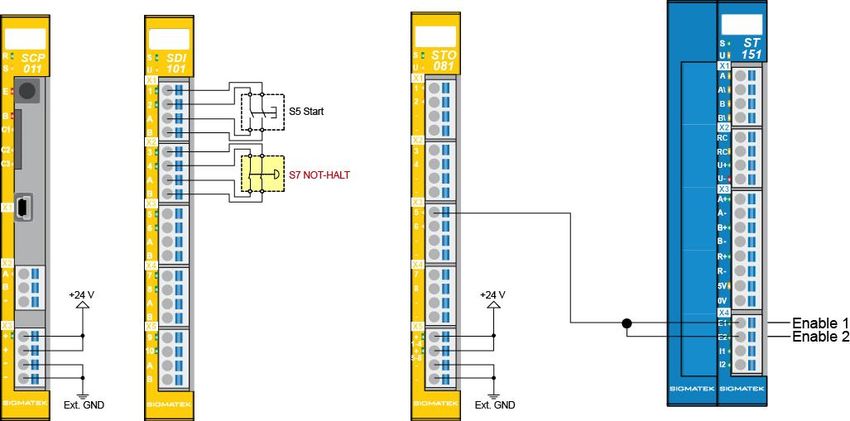
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
12.8.8 Stall Current Reduction ..................................................................... 64
12.8.9 Stepping Hysteresis .......................................................................... 64
17.09.2021 Seite 5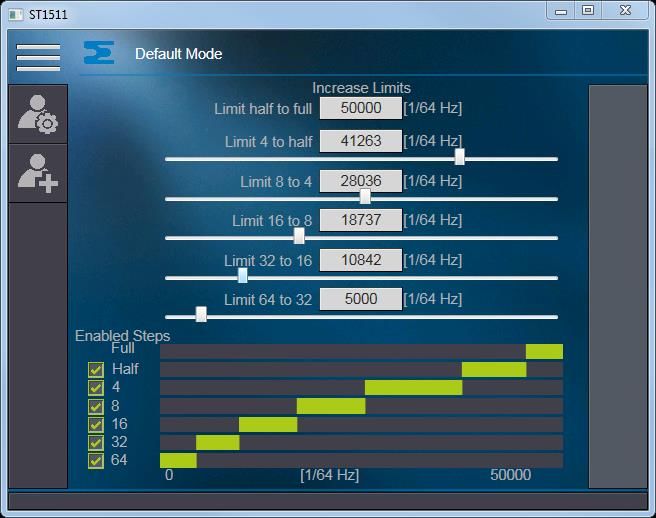
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
1 Grundlegende Sicherheitshinweise
1.1 Allgemeine Informationen zur Sicherheit
Werden Sicherheitshinweise nicht beachtet, können für Personen Gefährdungen entstehen,
die zu leichten bis schwerste Körperverletzungen oder in schwerwiegenden Fällen auch zum
Tod führen können. In leichteren Fällen können Anlagen und Geräte Schaden nehmen.
Die folgenden Symbole kennzeichnen die einzelnen Risiken und den Grad der Gefährdung
und werden in ihrer jeweiligen Bedeutung kurz erläutert. Lernen Sie daher die Sicherheits-
zeichen und ihre Bedeutungen kennen, um Gefährdungen und Risiken frühzeitig verhindern
zu können.
GEFAHR GEFAHR
Kennzeichnet eine unmittelbare Gefährdung mit hohem
Risiko, die unmittelbar Tod oder schwere Körperverlet-
zung zur Folge haben wird, wenn sie nicht vermieden
wird.
WARNUNG WARNUNG
Kennzeichnet eine mögliche Gefährdung mit mittlerem
Risiko, die Tod oder (schwere) Körperverletzung zur
Folge haben kann, wenn sie nicht vermieden wird.
VORSICHT VORSICHT
Kennzeichnet eine Gefährdung mit geringem Risiko,
die leichte Körperverletzung oder Sachschaden zur
Folge haben könnte, wenn sie nicht vermieden wird.
Seite 6 17.09.2021
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
1.2 Weitere Sicherheitshinweise
Warnung vor gefährlicher elektrischer Spannung
Warnung vor heißer Oberfläche
Gefahrenzeichen für ESD-gefährdete Bauteile
Dieses Symbol kennzeichnet wichtige bzw. weiterfüh-
rende Informationen in Bezug auf den Betrieb der ein-
zelnen Sicherheitsmodule.
17.09.2021 Seite 7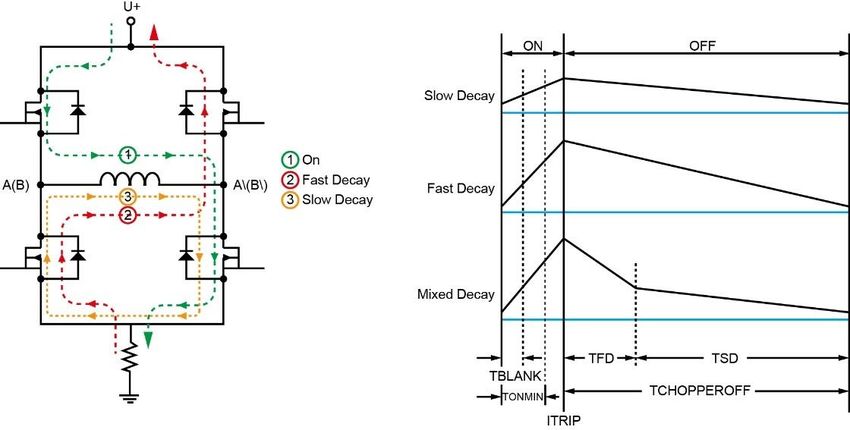
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
1.3 Allgemeine Anforderungen
Technische Diese Technische Dokumentation ist Bestandteil des Produktes.
Dokumentation
• Bewahren Sie die Technische Dokumentation stets
griffbereit in der Nähe der Maschine auf, da sie wichtige
Hinweise enthält.
• Geben Sie die Technische Dokumentation bei Verkauf,
Veräußerung oder Verleih des Produktes weiter.
Kenntnis der Sicher- Vor jeder Handhabung des zu dieser Dokumentation gehören-
heitshinweise den Produktes müssen die Bedienungsanleitung und die Sicher-
heitshinweise zur Kenntnis genommen werden. Für Schäden,
die durch Nichtbeachtung der Sicherheitshinweise oder der je-
weiligen einschlägigen Vorschriften entstehen, übernimmt
SIGMATEK GMBH & CO KG keine Haftung.
Die Kenntnis der Sicherheitshinweise und der Erklärungen die-
ser Dokumentation sowie des Safety-Systemhandbuches (siehe
Homepage1). ist eine Grundvoraussetzung für die bestimmungs-
gemäße Verwendung. Lesen Sie diese Bedienungsanleitung da-
her aufmerksam durch und machen Sie sich im Einzelnen gründ-
lich damit vertraut.
Nähere Hinweise zu Normen und Richtlinien usw. finden Sie im
Systemhandbuch
Qualifiziertes Fachper- Installation, Montage, Programmierung, Inbetriebnahme, Be-
sonal trieb, Wartung und Außerbetriebsstellung von Produkten der
Steuerungs- und Automatisierungstechnik im Allgemeinen sowie
von sicherheitsgerichteten Produkten im Besonderen darf nur
von qualifiziertem Fachpersonal durchgeführt werden.
Qualifiziertes Fachpersonal in diesem Sinne sind Personen, die
durch eine Ausbildung zur Fachkraft oder durch Unterweisung
durch eine Fachkraft die Berechtigung erworben haben, sicher-
heitsgerichtete Geräte, Systeme und Anlagen unter Beachtung
der einschlägigen Richtlinien und Normen der Sicherheitstechnik
zu bedienen und zu betreuen.
1 Unter Verwendung der Suchfunktion mit dem Stichwort „Safety-Systemhandbuch“
Seite 8 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
Bestimmungsgemäße Die Sicherheitsmodule sind für den Einsatz in sicherheitsgerich-
Verwendung teten Anwendungen bestimmt und erfüllen alle notwendigen Be-
dingungen für einen sicheren Betrieb gemäß Performancelevel e
(PL e) nach EN ISO 13849-1/-2 und SIL3 bzw. SIL CL 3 nach EN
62061.
Verwenden Sie das Sicherheitsmodul zu Ihrer und zur Sicherheit
anderer Menschen nur bestimmungsgemäß. Zur bestimmungs-
gemäßen Verwendung gehört auch die EMV-gerechte Installa-
tion und, dass Transport und Lagerung sachgemäß erfolgen.
Als nicht bestimmungsgemäß in diesem Sinne gilt:
• jegliche an Sicherheitsmodulen vorgenommene Verän-
derung jedweder Art.
• der Einsatz beschädigter Sicherheitsmodule.
• der Einsatz der Sicherheitsmodule außerhalb des in die-
ser Bedienungsanleitung beschriebenen Rahmens
• der Einsatz der Sicherheitsmodule außerhalb der in die-
ser Bedienungsanleitung beschriebenen technischen
Daten.
Sorgfaltspflicht des Be- Der Betreiber hat sicherzustellen, dass
treibers • die Sicherheitsmodule nur bestimmungsgemäß ver-
wendet werden.
• die Sicherheitsmodule nur in einwandfreiem, funktions-
tüchtigem Zustand betrieben werden.
• nur ausreichend qualifiziertes und autorisiertes Perso-
nal die Sicherheitsmodule betreibt.
• die Dokumentationen vollständig und in einem leserli-
chen Zustand am Betriebsort zur Verfügung stehen.
17.09.2021 Seite 9ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
2 Konformität mit EU-Richtlinien
2.1 Normen zur funktionalen Sicherheit
- EN / IEC 62061:2005/A2 2015
- EN ISO 13849-1:2015
- EN ISO 13849-2:2012
2.2 EU-Konformitätserklärung
CE-Konformitätserklärung
Das ST 151 ist konform mit folgenden europäischen Richtlinien:
• 2006/42/EG „Richtlinie des europäischen Parlaments und des Ra-
tes vom 17. Mai 2006 über Maschinen und zur Änderung der Richt-
linie 95/16/EG“ (Maschinenrichtlinie)
• 2014/30/EU „Elektromagnetische Verträglichkeit“ (EMV-Richtlinie)
• 2011/65/EU „Beschränkung der Verwendung bestimmter gefährli-
cher Stoffe in Elektro- und Elektronikgeräten (RoHS-Richtlinie)
Die EU-Konformitätserklärungen werden auf der SIGMATEK-Homepage zur
Verfügung gestellt. Unter Verwendung der Suchfunktion mit dem Stichwort
„EU-Konformitätserklärung“.
2.3 Sicherheitsrelevante Kenngrößen
Die Anwendung der angegebenen Kenngrößen setzt eine Risikoanalyse der Endanwen-
dung voraus.
Sicherheitskennwerte für zweikanaligen Betrieb der ST 151
Sicherheitskennwerte Sicherheitslevel
EN 62061 PFHD = 4,99E-08 (1/h)
SIL 3
SFF = 91,92 %
EN ISO 13849-1 MTTFD = 3498 Jahre
PL e / Kat. 4
DC = 99,12 %
Seite 10 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
3 Technische Daten
3.1 Spezifikation Schrittmotorausgang
Anzahl der Phasen 2
Ausgangsspannung Abhängig von der Versorgung (18-55 V)
Stromreglerfrequenz maximal 32 kHz
Ausgangsstrom maximal 5 A RMS
Ausgangsstrom über die Umge- maximal 5 A Dauerstrom bei 45 °C
bungstemperatur
maximal 3 A Dauerstrom bei 55 °C
Zwischenkreiskapazität 10 µF
Betriebsmodi Schrittfrequenzmodus
Schrittauflösung Vollschritt, Halbschritt (1)
4-/8-/16-/32-/64-fach Mikroschritt
Spannungsmessung 15-70 V
Bei Unterspannung < 15 V oder Überspannung > 70 V erfolgt eine hard-
wareseitige Abschaltung des Motorausgangs
Temperaturmessung 0-125 °C
mit Temperaturwarnung bei 103 °C
mit Übertemperaturabschaltung bei 108 °C
(1) In den Betriebsmodi Halbschritt und Mikroschritt erfolgt eine Erhöhung der Stromamplitude um Faktor √2. Durch
diese Stromerhöhung kann im Halbschrittbetrieb annähernd 95 % Drehmoment des Vollschrittbetriebs und im Mik-
roschritt 100 % Drehmoment des Vollschrittbetriebs erreicht werden. Beim Halbschrittbetrieb muss die Stromerhö-
hung softwareseitig aktiviert werden.
Hinweis Resonanzfrequenz
Beim Betrieb eines Schrittmotors im Schrittfrequenzvorgabemodus kann es zu Reso-
nanzen in bestimmten Frequenzbereichen kommen. Dies äußert sich durch Verlust
bzw. durch eine Reduktion des Drehmoments => der Schrittmotor verliert Schritte.
Das Phänomen ist durch den Aufbau des Schrittmotors bedingt und abhängig von
der Belastung. Die Problematik kann durch Halb- oder Mikroschrittbetrieb minimiert
bzw. vermieden werden.
17.09.2021 Seite 11ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
3.2 Spezifikation Bremschopper
Anzahl 1
Ausgang GND-schaltend
Maximaler Strom 6 A (1)
Kurzschlussfestigkeit ja
Bremswiderstand externer Leistungswiderstand
Schaltschwelle Bremswiderstand 60 V/55 V
ein/aus
(1)
Der Bremswiderstand ist unter Bedachtnahme auf die Anwendung zu dimensionieren. In den meisten Anwendungen
ist ein 15 Ω/100 W Widerstand ausreichend. Werden mehrere Motormodule an einer Zwischenkreisversorgung be-
trieben, so ist es möglich nur ein Modul mit einem Bremswiderstand auszurüsten. Empfohlener Bremswiderstand
ist bei SIGMATEK unter der Artikelnummer 20-014-061-Z1 erhältlich.
Achtung Heiße Oberfläche!
Beachten Sie, dass sich der Bremswiderstand im Betrieb stark erwärmt.
Achtung: während und auch einige Minuten nach Betrieb besteht Gefahr
von Verbrennung beim Berühren der Bremswiderstand-Oberfläche!
3.3 Spezifikation Inkrementalgebereingang
Anzahl 1
Eingangssignale Inkrementalgebersignale RS422 (A, /A, B, /B, R, /R)
RS422-Pegel (150 Abschluss, im Modul integriert)
Inkrementalgebersignale TTL (A, B, R)
TTL-Pegel (1200 Pull-Up, im Modul integriert)
Eingangsfrequenz maximal 125 kHz
Zählerfrequenz maximal 500 kHz
Signalauswertung 4-fach
Zählerauflösung 16 Bit
Geberversorgung +5 V/0,2 A kurzschlussfest
Seite 12 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
3.4 Spezifikation Enable Eingänge für STO
Anzahl 2
Eingangsspannung +24 V DC
Eingangsspannungsbereich minimal +18 V maximal +30 V
Signalpegel low: ≤ +5 V high: ≥ +15 V
Schalthysterese typisch +11 V
Eingangsstrom 3 mA bei +24 V
Eingangsverzögerung typisch 0,5 ms
Sicherheitslevel erfüllt die Anforderungen der Kategorie 4, Performance Level „e“ nach EN
ISO 13849-1 und SILCL 3 nach EN 62061
Sicherheitsfunktionalität STO nach EN61800-5-2, Punkt 4.2.2.2
Dem Motor wird keine Energie zugeführt, die eine Drehung verursachen
kann. Die Schrittmotorendstufe liefert keine Energie an den Motor, die ein
Drehmoment erzeugen kann.
3.5 Spezifikation Latch-/Digitaleingänge
Anzahl 2
Eingangsspannung typisch +24 V maximal +30 V
Signalpegel low: < +8 V high: > +14 V
Schalthysterese typisch +11 V
Eingangsstrom 3,7 mA bei +24 V
Eingangsverzögerung typisch 10 µs
17.09.2021 Seite 13ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
3.6 Elektrische Anforderungen
Versorgungsspannung Motor +18-55 V DC, NEC Class 2
Stromaufnahme Motorversorgung maximal 6 A (lastabhängig)
Stromaufnahme Versorgungs- typisch 80 mA maximal 120 mA
spannung +24 V am S-DIAS-Bus (inkl. +5 V-Versorgung (inkl. +5 V-Versorgung des Inkre-
des Inkrementalgebers) mentalgebers)
Versorgung vom S-DIAS-Bus +5 V
Stromaufnahme am S-DIAS-Bus - -
Hinweise Spannungsripple Motorversorgung
Die Motorversorgung (X2) ist mit einer der Anwendung entsprechenden Zwischen-
kreiskapazität zu beschalten (mindestens 2000 µF/100 V). Dabei ist auf kurze Leitun-
gen und entsprechende Leitungsquerschnitte zu achten.
(maximal 15 cm zwischen Modul und Kondensator / 1,5 mm²)
Um den Spannungsripple im zulässigen Bereich (< 2 Vss) zu halten, ist es erforder-
lich einen Elektrolytkondensator entsprechender Kapazität parallel zu den Motorver-
sorgungsklemmen anzuschließen. Als Richtwert für die erforderliche Kapazität kön-
nen ca. 2000 µF pro Ampere Versorgungsstrom angenommen werden. Um ein günsti-
ges EMV-Verhalten zu erreichen, empfiehlt es sich den Kondensator nahe der Schritt-
motorendstufe zu montieren und die Anschlussleitungen kurz zu halten.
Für USA und Kanada:
Die Versorgung muss limitiert sein auf:
a) max. 5 A bei Spannungen von 0-20 V DC, oder
b) 100 W bei Spannungen von 20-60 V DC
Das limitierende Bauteil (z.B. Trafo, Netzteil oder Sicherung) muss von einem NRTL
(National Recognized Testing Laboratory, z.B. UL) zertifiziert sein.
Seite 14 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
Bremsen eines Schrittmotors
Beim Abbremsen eines Schrittmotors kann es zu einem generatorischen Betrieb kom-
men, bei dem die kinetische Energie des Motors in elektrische umgewandelt wird. Die
Energie des Motors wird dabei in die Versorgung der Schrittmotorendstufe zurückge-
speist, wodurch es zum Anstieg der Versorgungsspannung kommt. Es ist darauf zu
achten, dass eine Rückspeisespannung am Motorversorgungsanschluss von 65 V
nicht überschritten wird. Dafür ist eventuell eine externe Kapazität an der Motorver-
sorgung notwendig. Falls die Kondensatoren des Netzteils nicht ausreichend sind, ist
die Verwendung eines Ballastwiderstandes erforderlich der an die Schrittmotorend-
stufe angeschlossen werden kann, welcher die überschüssige Energie in Wärme um-
wandelt. Bei der Auswahl des Netzteils ist darauf zu achten, dass dieses entsprechend
rückspeisefest bis zur maximal auftretenden Rückspeisespannung ist.
Das Ein- oder Ausstecken des Steckers an X2 während des Betriebs des Motors ist
nicht zulässig!
Hinweis S-DIAS Versorgung
Wird dieses S-DIAS Modul an einem S-DIAS Versorgungsmodul mit mehreren S-DIAS
Modulen eingesetzt, müssen die Summenströme der verwendeten S-DIAS Module er-
mittelt und überprüft werden.
Der Summenstrom der +24 V-Versorgung darf 1,6 A nicht überschreiten!
Der Summenstrom der +5 V-Versorgung darf 1,6 A nicht überschreiten!
Die Angabe der Stromaufnahme findet man in der modulspezifischen technischen
Dokumentation unter „Elektrische Anforderungen“.
Beim fehlerhaften Einstellen von Parametern oder bei falscher Verdrahtung
kann es zu einer Zerstörung des Motors kommen. Besonders muss auf die
Motorströme und die I2T-Einstellungen (A-I2TT, A-I2TERR) geachtet wer-
den, welche über das LASAL Class 2 Tool im DIAS-Drive Editor parametriert
werden können.
17.09.2021 Seite 15ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
3.7 Sonstiges
Artikelnummer 20-014-151
20-014-151-X (Leiterplatte mit Schutzlack)
Hardwareversion 2.x
Normung UL in Vorbereitung
Approbationen CE
3.8 Umgebungsbedingungen
Lagertemperatur -20 ... +85 °C
Umgebungstemperatur 0 ... +55 °C
Luftfeuchtigkeit 0-95 %, nicht kondensierend
Aufstellungshöhe über Meeres- 0-2000 m ohne Derating
höhe
> 2000 m mit Derating der maximalen Umgebungstemperatur um 0,5 °C
pro 100 m
Betriebsbedingungen Verschmutzungsgrad 2
EMV-Störfestigkeit nach 61000-6-7:2015 (Fachgrundnormen - Störfestigkeitsanforderungen an
Geräte und Einrichtungen, die zur Durchführung von Funktionen in sicher-
heitsbezogenen Systemen (funktionale Sicherheit) an industriellen Stand-
orten vorgesehen sind)
nach EN 61000-6-2:2007 (Industriebereich)
(erhöhte Anforderungen nach IEC 62061)
EMV-Störaussendung nach EN 61000-6-4:2007 (Industriebereich)
Schwingungsfestigkeit EN 60068-2-6 3,5 mm von 5 Hz-8,4 Hz
1 g von 8,4 Hz-150 Hz
Schockfestigkeit EN 60068-2-27 15 g
Schutzart EN 60529 IP20
(1)
maximal 5 A Dauerstrom bei 45 °C, maximal 3 A Dauerstrom bei 55 °C
Seite 16 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 4 Mechanische Abmessungen 17.09.2021 Seite 17
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
5 Anschlussbelegung
Das Ein- oder Ausstecken des Motorversorgungssteckers X2 während des Betriebes
ist nicht zulässig!
Seite 18 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
5.1 Status-LEDs
Modul Status grün EIN Modul aktiv
AUS Keine Versorgung vorhanden
BLINKT (5 Hz) Keine Kommunikation
User gelb EIN Von Applikation einstellbar
AUS (z.B. kann die LED des Moduls über die Visualisierung blinkend
eingestellt werden um die Modulfindung im Schaltschrank zu er-
BLINKT (2 Hz) leichtern)
BLINKT (4 Hz)
Motorphase A, A\, gelb EIN Motorphase aktiv
B, B\
AUS Keine Ansteuerung der Phase
Bremschopper gelb EIN Bremschopper aktiv
AUS Bremschopper inaktiv
Motorversorgung grün EIN Motorversorgung vorhanden, Motor aktiv
BLINKT Motorversorgung vorhanden, Motor inaktiv
AUS Motorversorgung nicht vorhanden
Motor Error rot EIN Fehler Schrittmotorendstufe (externe Enable-Eingänge E1 & E2
inaktiv/ fehlen oder interner Modulfehler, STO-Fehler)
AUS Kein Fehler
Gebersignal A, B, grün EIN Gebersignal HIGH
R
AUS Gebersignal LOW
Geberversorgung gelb EIN Geberversorgung OK
AUS Keine Geberversorgung vorhanden
Enableeingang 1, 2 grün EIN Eingang EIN
AUS Eingang AUS
Latch-/ Digitalein- grün EIN Eingang EIN
gang 1, 2
AUS Eingang AUS
17.09.2021 Seite 19ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
5.2 Zu verwendende Steckverbinder
Steckverbinder:
X1-X4: Steckverbinder mit Federzugklemme (im Lieferumfang enthalten)
Die Federzugklemmen sind für den Anschluss von ultraschallverdichteten (ultraschallver-
schweißten) Litzen geeignet.
Anschlussvermögen:
Abisolierlänge/Hülsenlänge: 10 mm
Steckrichtung: parallel zur Leiterachse bzw. zur Leiterplatte
Leiterquerschnitt starr: 0,2-1,5 mm2
Leiterquerschnitt flexibel: 0,2-1,5 mm2
Leiterquerschnitt Litzen ultraschallverdichtet: 0,2-1,5 mm2
Leiterquerschnitt AWG/kcmil: 24-16
Leiterquerschnitt flexibel m. Aderendhülse ohne Kunststoffhülse: 0,25-1,5 mm2
Leiterquerschnitt flexibel m. Aderendhülse mit Kunststoffhülse: 0,25-0,75 mm2 (Reduzierungsgrund d2 der
Aderendhülse)
Seite 20 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 5.3 Beschriftungsfeld Hersteller Weidmüller Typ MF 10/5 CABUR MC NE WS Artikelnummer Weidmüller 1854510000 Kompatibler Drucker Weidmüller Typ Printjet Advanced 230V Artikelnummer Weidmüller 1324380000 17.09.2021 Seite 21
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE 6 Verdrahtung 6.1 Anschlussbeispiel Seite 22 17.09.2021
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
6.2 Hinweise
Folgende Installationshinweise sind zu beachten:
• Die Hutschiene muss eine ordentliche Masseverbindung aufweisen.
• Zur Verdrahtung des Inkrementalgebers ist ein geschirmtes Kabel zu verwenden. Bei ei-
nem RS422-Geber empfiehlt sich der Einsatz eines geschirmten und verdrillten Kabels.
Der Schirm ist so nah wie möglich vor dem Modul aufzulegen.
• Zur Verdrahtung der Motorleitungen ist ein geschirmtes Kabel zu verwenden. Der Schirm
ist so nahe wie möglich am Modul aufzulegen.
• Die Schirmung ist auf einer Schirmungssammelschiene anzulegen
Erdungsschiene nach Möglichkeit mit Schaltschrank-Erdungsschiene verbinden!
Die maximale Leitungslänge der Geber- und Motorleitungen beträgt 30 m.
WICHTIG:
Das S-DIAS Modul darf NICHT unter Spannung an- oder abgesteckt werden!
17.09.2021 Seite 23ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE 7 Funktionsbeschreibung 7.1 Betriebsmodi Schrittmotorendstufe 7.1.1 Vollschrittbetrieb Im Vollschrittbetrieb werden die Wicklungen wie unten dargestellt bestromt. Dies hat zur Folge, dass der Motor nur volle Schritte ausführt. Er führt also bei einer Umdrehung die Nenn- schrittzahl des Motors aus. 7.1.2 Halbschrittbetrieb Im Halbschrittbetrieb werden die Wicklungen wie unten dargestellt bestromt. Es wird nun zwischen jedem Vollschritt ein Zwischenschritt ausgeführt. Die Auflösung pro Umdrehung wird dadurch verdoppelt. Beim Halbschrittbetrieb kann eine Stromerhöhung softwareseitig aktiviert werden, um annä- hernd 95 % Drehmoment des Vollschrittbetriebs zu erreichen. Seite 24 17.09.2021
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 7.1.3 Mikroschrittbetrieb Beim Mikroschrittbetrieb werden die einzelnen Wicklungen mit einem annähernd sinusförmi- gen Strom beaufschlagt. Beim ST 151 wird die Sinusschwingung mit 256 Schritten aufgelöst. Daraus ergeben sich 64 Mikroschritte pro Vollschritt. 17.09.2021 Seite 25
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE 7.2 Stromregelung Schrittmotor Die Stromregelung des Schrittmotors wird durch die Stromanstiegszeit bzw. die Stromab- fallszeit in der Motorwicklung beeinflusst. Diese Zeiten sind maßgeblich abhängig von der Höhe der Versorgungsspannung, der Induktivität und dem Wicklungswiderstand des Motors. Die Stromanstiegszeit kann durch die Höhe der Versorgungsspannung beeinflusst werden. Je höher die Versorgungsspannung, umso schneller steigt der Strom in der Motorwicklung an. Der Stromregler arbeitet prinzipiell so, dass die H-Brücke die Motorwicklung aktiv bestromt bis der Stromsollwert (ITRIP) erreicht wird. Danach wird der Stromabklingvorgang (Decay) ein- geleitet. Die Stromabfallszeit in der Motorwicklung wird durch den Decay Mode beeinflusst. Beim Slow Decay Mode wird die Motorwicklung über die H-Brücke kurzgeschlossen. Die in der Wicklung gespeicherte Energie wird über den Innenwiderstand des Motors und den Innenwiderstand der H-Brücke der Endstufe abgebaut. Beim Fast Decay Mode geht das Abklingen des Stroms wesentlich schneller, indem die Wick- lung durch Umpolen kurzgeschlossen wird. Die in der Wicklung gespeicherte Energie wird dabei in die Versorgung zurückgespeist. Werden beide Varianten beim Abklingen des Motorstroms verwendet spricht man vom Mixed Decay Mode. Bei diesem Modus werden die Vorteile beider Verfahren vereint. Es wird zuerst der Strom mittels Fast Decay auf eine Schwelle abgebaut und dann auf Slow Decay umge- schaltet um den Stromripple klein zu halten. Seite 26 17.09.2021
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 Die ST 151 besitzt einen adaptiven Fast Decay Stromregler bei dem automatisch der opti- male Decaymode angewendet wird. Der Stromregler entscheidet dabei anhand der benötig- ten Zeit für Erreichen des Sollstromwertes und der konfigurierten ChopperOnTimeMin (TONMIN) Wertes, welcher Decay Mode verwendet wird und ob die FastDecayTime (TFD) re- duziert, erhöht oder beibehalten wird. Die ChopperOnTimeMin, die maximale FastDecay- Time und die maximale FastDecayTimeFallingStep für negative Stromsollwertsprünge kön- nen über Parameter konfiguriert werden. Mit dem Parameter ChopperOffTime (T CHOPPEROFF) wird die Stromreglerbasisfrequenz definiert. Wenn die Motorwicklung über die H-Brücke geschalten wird, entstehen durch das Laden bzw. Entladen parasitärer Kapazitäten Stromspitzen. Die Strommessung wird hierzu für eine konstante Zeit (Blanking Time TBLANK) deaktiviert. 17.09.2021 Seite 27
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE 7.3 Inkrementalgeber 7.3.1 Signalverlauf “Count UP” 7.3.2 Signalverlauf “Count DOWN” 7.3.3 Signalverlauf “Referenzimpuls (Zero Position)” Seite 28 17.09.2021
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 7.3.4 Latch-Funktion Diese Funktion wird vorwiegend für die Referenzfahrt verwendet. Die Inkrementalgeberdaten und Taktzählerwerte können zum Zeitpunkt eines Events an ei- nem gewählten Eingang gespeichert (gelatched) werden. Über Latchregister sind die Event- quelle (Eingang) und die Eventart (Flanke) einstellbar. 17.09.2021 Seite 29
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
8 Zusätzliche Sicherheitshinweise
Die Sicherheitsfunktion „STO“ ist ein integraler Bestandteil der Schrittmotorendstufe. Es er-
füllt alle notwendigen Bedingungen für einen sicheren Betrieb nach SIL 3 gemäß EN 62061
und nach PL e, Kat.4 gemäß EN ISO 13849-1.
Sicherheitsmodule dürfen nur von Netzteilen betrieben werden, die den Anfor-
derungen von PELV nach EN60204 entsprechen.
Installation, Montage, Programmierung, Inbetriebnahme, Betrieb, Wartung und
Außerbetriebsstellung von Sicherheitsmodulen darf nur von geschultem
Fachpersonal durchgeführt werden.
Geschultes Fachpersonal in diesem Sinne sind Personen, die durch eine Aus-
bildung zur Fachkraft oder durch Unterweisung durch eine Fachkraft die Berech-
tigung erworben haben sicherheitsgerichtete Geräte, Systeme und Anlagen un-
ter Beachtung der einschlägigen Richtlinien und Normen der Sicherheitstechnik
zu bedienen und zu betreuen.
Verwenden Sie das Sicherheitsmodul zu Ihrer und zur Sicherheit anderer
Menschen nur bestimmungsgemäß.
Zur bestimmungsgemäßen Verwendung gehört auch die EMV-gerechte
Installation.
Als nicht bestimmungsgemäß in diesem Sinne gilt
• jegliche an Sicherheitsmodulen vorgenommene Veränderung jedwe-
der Art oder der Einsatz beschädigter Sicherheitsmodule
• der Einsatz der Sicherheitsmodule außerhalb des in dieser Bedie-
nungsanleitung beschriebenen technischen Rahmens
• der Einsatz der Sicherheitsmodule außerhalb der in dieser Bedie-
nungsanleitung beschriebenen technischen Daten (siehe Abschnitt
„Technische Daten“ in der jeweiligen Produktdokumentation).
Beachten Sie ferner unbedingt die Warnhinweise in den anderen Ab-
schnitten dieser Anleitung. Diese Hinweise sind optisch durch Symbole
besonders hervorgehoben.
• Nur geschultes Fachpersonal darf die „Sichere Wiederanlaufsperre“ STO
(Safe Torque off) installieren und parametrieren.
• Alle Steuerungseinrichtungen (Schalter, Relais, PLC, etc.) und der Schalt-
schrank müssen den Anforderungen von EN ISO 13849 entsprechen. Dies
beinhaltet:
– Türschalter, etc. mit mindestens Schutzklasse IP54
– Schaltschrank mit mindestens Schutzklasse IP54
• Geeignete Kabel und Endhülsen sind zu benutzen.
Seite 30 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
• Alle Kabel, die die Sicherheit betreffen (z.B. Steuerkabel für die Eingänge
ENABLE 1 und ENABLE 2) müssen außerhalb des Schaltschranks in ei-
nem Kabelkanal verlegt sein. Kurz- oder Querschlüsse in den Signalleitun-
gen müssen vermieden werden! Siehe EN ISO 13849.
• Sollten externe Kräfte auf die mit der Sicherheitsfunktion STO verwendeten
Achsen einwirken (z.B. hängende Last), so müssen weitere Maßnahmen
ergriffen werden (z.B. eine elektromagnetische Zweiflächen-Federdruck-
bremse, anstatt einer Permanentmagnetbremse).
Nichtbeachtung dieser Vorsichtsmaßnahmen kann zu schweren Verletzungen führen.
Die Hauptspannungsversorgung des Servoverstärkers muss in folgenden Fällen über den
Hauptschalter abgeschaltet werden:
• Reinigungs-, Wartungs- oder Reparaturmaßnahmen
• Längerer Außerbetriebssetzung
Nichtbeachtung dieser Vorsichtsmaßnahmen kann zu schweren Verletzungen führen.
8.1 STO
Die Schrittmotorendstufe unterstützt die Sicherheitsfunktionen STO (Safe Torque Off) und
erfüllt die Anforderungen der Kategorie 4, Performance Level „e“ nach EN ISO 13849-1 und
SIL3 nach EN 62061.
Zu diesem Zweck verfügt die Endstufe über zwei sichere Eingänge ENABLE 1 und ENABLE
2.
Als 24 V-Spannungsversorgung dürfen nur PELV/SELV-Netzteile verwendet werden.
17.09.2021 Seite 31ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
8.2 Funktionsweise
Die Sicherheitsfunktionen der Schrittmotorendstufe werden durch zwei sichere digitale Ein-
gänge gesteuert.
Die folgende Tabelle zeigt die Zustände, die die sicheren Eingänge ENABLE 1 und ENABLE
2 annehmen müssen um Normalbetrieb zu ermöglichen bzw. die Sicherheitsfunktion auszu-
lösen.
Zustand der Eingänge Beschreibung
ENABLE 1 ENABLE 2
Offen Offen Sicherer Zustand des
Antriebssystems
Offen Low
Low Offen
Low Low
High High Antriebssystem bereit
Werden die Eingänge ENABLE 1 und ENABLE 2 von einem beliebigen Zustand in den Zu-
stand „Antrieb betriebsbereit“ gebracht, so ist die Schrittmotorendstufe nicht sofort freige-
schaltet. Um das System in den Zustand „Antriebssystem bereit“ zu bringen, muss ein Wech-
sel vom „Low – Low“ in den „High – High“ Zustand erfolgen.
8.3 Funktionsprüfung
Die Funktionsprüfung der Sicherheitsfunktion ist notwendig um den korrekten
Betrieb zu gewährleisten. Die gesamte Sicherheitsschaltung ist auf volle Funk-
tionalität zu prüfen.
Die Prüfung ist zu den folgenden Zeitpunkten durchzuführen:
• Nach der Installation
• In regelmäßigen Abständen, mindestens jedoch einmal jährlich
Führt die Funktionsprüfung zu einem unzulässigen Zustand der Maschine, muss der
Fehler gesucht und behoben werden, bevor die Sicherheitsfunktion erneut getestet
wird. Im Falle des erneuten Fehlers während der Funktionsprüfung, darf die Ma-
schine nicht mehr in Betrieb genommen werden.
Die Nichtbeachtung dieser Vorsichtsmaßnahmen kann zu schweren Verletzungen und
Sachschäden führen.
Seite 32 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 9 Anschlussbeispiele Es handelt sich in den folgenden Unterpunkten um Verdrahtungsbeispiele. Es muss darauf geachtet werden, dass alle konstruktiven Maßnahmen etc. eingehalten und angewandt wer- den, um die Anforderungen der angewendeten Kategorie zu erfüllen. 9.1 Performance Level e, Kategorie 4 bzw. SIL 3 – Safety-SPS Zur Einhaltung der Kategorie 4, Performance Level „e“ nach EN ISO 13849-1 und SIL 3 nach EN 62061 müssen zwei fehlersichere Ausgänge einer Sicherheits-SPS benutzt werden. Hier- bei ist eine Querschlusserkennung zwischen den beiden Leitungen durch die Ausgangstests des STO 081 möglich. 17.09.2021 Seite 33
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE Seite 34 17.09.2021
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 9.2 Performance Level e, Kategorie 3 & SIL 3 – Safety-SPS Zur Einhaltung der Kategorie 3, Performance Level „e“ nach EN ISO 13849-1 und SIL 3 nach EN 62061 muss ein fehlersicherer Ausgang einer Sicherheits-SPS benutzt werden. Grund für die Kategorie 3 ist hier, dass keine Querschlusserkennung der beiden Leitungen möglich ist. 17.09.2021 Seite 35
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE Seite 36 17.09.2021
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 9.3 Performance Level e, Kategorie 4 bzw. SIL 3 – Konventionell Zur Einhaltung der Kategorie 4, Performance Level „e“ nach EN ISO 13849-1 und SIL 3 nach EN 62061 muss die Verlegung der Leitung lt. EN ISO 13849-2, Tabelle D.4 eingehalten wer- den (getrennte Verlegung, Fehlerausschlüssen von Kurzschlüssen zwischen Leitern), da hier keine Querschlusserkennung möglich ist. 17.09.2021 Seite 37
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE Seite 38 17.09.2021
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 9.4 Performance Level d, Kategorie 2 bzw. SIL 2 – Konventionell Hierbei handelt es sich um eine 1-kanalige Verdrahtung, wobei die Enable Eingänge eigens getestet werden. Hier ist keine Querschlusserkennung möglich. 17.09.2021 Seite 39
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE Seite 40 17.09.2021
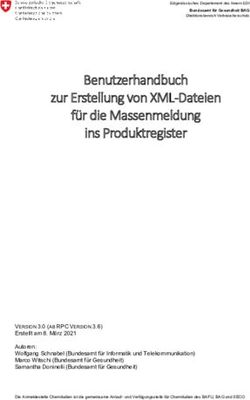
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 10 Montage Die S-DIAS Module sind für den Einbau im Schaltschrank vorgesehen. Zur Befestigung der Module ist eine Hutschiene erforderlich. Diese Hutschiene muss eine leitfähige Verbindung zur Schaltschrankrückwand herstellen. Die einzelnen S-DIAS Module werden aneinanderge- reiht in die Hutschiene eingehängt und durch Schließen der Rasthaken fixiert. Über die Er- dungslasche auf der Rückseite der S-DIAS Module wird die Funktionserdverbindung vom Modul zur Hutschiene ausgeführt. Es ist nur die waagrechte Einbaulage (Modulbezeichnung oben) mit ausreichend Abstand der Lüftungsschlitze des S-DIAS Modulblocks zu umgeben- den Komponenten bzw. der Schaltschrankwand zulässig. Das ist erforderlich, um die opti- male Kühlung und Luftzirkulation zu erreichen, sodass die Funktionalität bis zur maximalen Betriebstemperatur gewährleistet ist. 17.09.2021 Seite 41
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE Empfohlene Minimalabstände der S-DIAS Module zu umgebenden Komponenten bzw. der Schaltschrankwand: a, b, c … Abstände in mm (inch) 11 Entsorgung Für die Entsorgung des Produktes sind die jeweiligen Richtlinien, möglicherweise länderab- hängig, einzuhalten und zu befolgen. Seite 42 17.09.2021
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 12 Hardwareklasse ST151 Hardwareklasse ST151 für das S-DIAS-Motor-Modul ST 151 Diese Hardwareklasse wird zum Ansteuern des Hardwaremoduls ST151 mit 1x Steppertrei- ber, 1x Brake Chopper und 1x Inkrementalencoder (RS422/TTL) verwendet. Genauere Hard- wareinformationen findet man in der Moduldokumentation. 17.09.2021 Seite 43
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE Seite 44 17.09.2021
S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151 17.09.2021 Seite 45
ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
12.1 Allgemein
ClassState State Dieser Server zeigt den aktuellen Status der Hardwareklasse an.
Device ID State Auf diesem Server wird die Device-ID des Hardwaremoduls angezeigt.
FPGA Version State FPGA-Version des Modules im Format 16#XY (z.B. 16#10 = Version 1.0).
Hardware Ver- State Hardware-Version des Modules im Format 16#XXYY (z.B. 16#0120 = Version
sion 1.20)
Serial Number State Auf diesem Server wird die Seriennummer des Hardwaremoduls angezeigt.
Retry Counter State Der Retry Counter wird hoch gezählt, wenn ein Transfer fehlschlägt.
LED Control Output Mit diesem Server kann das Applikations-LED des S-DIAS-Moduls gesteuert
werden, um das Modul im Verbund schneller finden zu können.
0 LED aus
1 LED ein
2 langsam blinken
3 schnell blinken
Online State Wird auf 1 gesetzt, wenn die Hardware betriebsbereit ist.
Required Property Diese Einstellung ist standardmäßig aktiviert, d.h. dieses S-DIAS-
Hardwaremodul an dieser Position ist für das System zwingend erforderlich
und darf keinesfalls fehlen, ausgesteckt werden oder einen Fehler liefern, an-
sonsten wird die gesamte Hardware abgeschaltet. Fehlt das Hardwaremodul,
liefert es einen Fehler oder wird es entfernt, löst dies einen S-DIAS-Fehler
aus. Wird dieser Client mit 0 initialisiert, ist dieses Hardwaremodul an der Po-
sition nicht zwingend erforderlich, d.h. es kann jederzeit an- bzw. abgesteckt
werden. Es sollte aber mit Bedacht die Sicherheit des Systems ausgewählt
werden, welche Komponenten „nicht required“ sein sollen.
Seite 46 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
12.2 Inkremental Encoder
Encoder Posi- Input Position des Inkrementalgebers (32 Bit Up-/Down-Zähler mit Vorzeichen).
tion Die Statusabfrage erfolgt über Read().
Z Puls Input Referenzposition des Encoders.
0 aktuelle Position ungleich Referenzposition
1 aktuelle Position entspricht Referenzposition
Die Statusabfrage erfolgt über Read().
Z Puls Latched Input Gelatchte Referenzposition des Encoders.
0 Referenzposition wurde seit der letzten Statusabfrage nicht er-
reicht
1 Referenzposition wurde seit der letzten Statusabfrage erreicht
Die Statusabfrage erfolgt über Read(). Im Zuge der Statusabfrage wird der
Server auf 0 zurückgesetzt.
Latch Position Input Gelatchte Position des Inkrementalgebers an der Referenzmarke.
Encoder Zero
Pulse
Latch Position Input Gelatchte Position bei einer positiven Flanke an Eingang 1/2
Input 1-2 Rising Je nach Option LatchType wird die Position des Inkrementalgebers oder des
internen Schrittzählers gelatcht.
Latch Position Input Gelatchte Position bei einer negativen Flanke an Eingang 1/2
Input 1-2 Falling Je nach Option LatchType wird die Position des Inkrementalgebers oder des
internen Schrittzählers gelatcht.
Invert Encoder Property Zählrichtung des Encoders.
0 normal (Default)
1 invers
als Initialisierungswert
Invert Zero Po- Property Mit Aktivierung dieser Einstellung werden die Server ZPuls und ZPulsLatched
sition invertiert ausgegeben.
Diese Einstellung ist vom verwendeten Encoder abhängig und muss so erfol-
gen, dass der Ruhezustand als „0“ und der Referenzimpuls als „1“ an den
Servern ZPuls und ZPulsLatched dargestellt wird.
0 normal (Default)
1 invertiert
als Initialisierungswert
Encoder Samp- Property Hier kann die Einstellung für die Flankenauswertung des Gebers eingestellt
ling werden.
0 Encoder Aus
1 1-fach Auswertung
2 2-fach Auswertung
3 4-fach Auswertung (Default)
als Initialisierungswert
Encoder Mode Property Modus des Encoders.
0 TTL-Modus (Default)
1 RS422-Modus
als Initialisierungswert
17.09.2021 Seite 47ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
Latch Type Property Auswahl der Quelle für die gelatchten Positionen.
0 Schrittzähler der Hardware
1 Inkrementalgeber
als Initialisierungswert
A/B Count Property Einstellung des Zählmodus des Inkrementalgebers als Initialisierungswert.
Mode Wenn die 1-fach Auswertung ausgewählt wurde.
0 A pulses und B direction
1 true A/B (Default)
12.3 Digitale Eingänge 1 und 2
Digital Input 1-2 Input Digitale Eingänge 1-2.
0 aus
1 ein
Input 1-2 Input Signal der positiven Flanke des Digitaleingangs 1-2
Latched Rising Wird erst bei Ausführen der Read-Methoden rückgesetzt.
Input 1-2 Input Signal der negativen Flanke des Digitaleingangs 1-2
Latched Falling Wird erst bei Ausführen der Read-Methoden rückgesetzt.
Seite 48 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
12.4 Stepper Motor
Enable Output Wird zum Einschalten des Motors verwendet.
0 Motor ausgeschalten
1 Motor eingeschalten
Der Serverwert kann über die Methode write() geändert werden.
Wird der Motor ausgeschalten (Server „Enable“ auf 0), dann wird die einge-
stellte Geschwindigkeit (Server „SetFreqOut“) auf 0 zurückgesetzt.
Der Server kann nicht auf 1 gesetzt werden, solange ein aufgetretener Kurz-
schlussstrom oder eine zu hohe Induktionsspannung des Motors nicht über
den Server „QuitError“ quittiert wurde.
Actual Position Input Aktueller Schrittcounter der Hardware mit einer Auflösung von 64 Microsteps.
Set Frequency Output Setzt die Frequenz für den Stepper-Ausgang in [1/64 Hz].
Out
Target Fre- Output Setzt die gewünschte Ziel-Frequenz in [1/64 Hz].
quency Out Wird für die Berechnung des adaptiven Microstepping benötigt, siehe Punkt
1.2.1 bei den „Internen Eigenheiten“.
-1 .. deaktiviert.
Current In- Output Einschalten der Funktion CurrentIncrease im Halfstep-Mode. Durch diese Op-
crease tion wird ein ruhigerer Lauf des Rotors erreicht, indem ein Zwischenschritt mit
um den Faktor sqrt(2) erhöhtem Strom eingefügt wird.
Für den Microstep-Mode ist diese Stromerhöhung immer aktiv.
Control Word Output Steuerwort nach DS402.
Bit12 ManufactureSpec1: wird verwendet um die CurrentIncrease Funktion zu
aktiveren.
State Word Input Statuswort nach DS402.
Bit 1 ReadyToSwitchOn
Bit 2 SwitchedOn
Bit 3 OperationEnabled
Bit 4 Fault
Bit 5 VoltageDisabled
Bit 6 QuickStop
Bit 7 SwitchOnDisabled
Bit 8 Warning
Bit 9 ManufactureSpecific1
Bit 10 Remote
Bit 11 TargetReached
Bit 12 InternalLimitActive
Bit 13 OperationModeSpecific1
Bit 14 OperationModeSpecific2
Bit 15 Manufacture Specific2
Bit 16 Manufacture Specific3
17.09.2021 Seite 49ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
Error Info State Zeigt an, wenn von der Hardware ein Fehler erkannt wurde. Die Fehler ab Bit
17 werden je nach Einstellung von „Refresh Values“ aktualisiert.
Bit 1 reserved
Bit 2 Fault (Bridge not OK)
Bit 3 Temperature not OK
Bit 4 Over current
Bit 5 STO switch off (en1/en2)
Bit 6 STO test switch off (negative test during operation)
Bit 7 reserved
Bit 8 reserved
Bit 9 Brake chopper over current (disable brake chopper)
Bit 10 reserved
Bit 11 reserved
Bit 12 reserved
Bit 13 reserved
Bit 14 reserved
Bit 15 reserved
Bit 16 reserved
Asynchrone Daten
Bit 17 Regen resistor load warning
Bit 18 Over temperature warning
Bit 19 Over temperature failure (disable drive)
Bit 20 Over current failure GND (disable drive)
Bit 21 Over current failure bridge 1 (disable drive)
Bit 22 Over current failure bridge 2 (disable drive)
Bit 23 Regen resistor load disable bridge
Bit 24 Regen resistor load disable resistor
Bit 25 Bridge voltage too low
Bit 26 Bridge voltage too high
Bit 27 External enable 1 (STO) not OK
Bit 28 External enable 2 (STO) not OK
Bit 29 Safety start up status test not OK
Bit 30 Motor enable error
Bit 31 Three time sync in lost
Bit 32 Safe ramp down pending
Axis Error State Zeigt einen Fehler in der Stepperkomponente an. (Übertemperatur, Über-
spannung, Überstrom ….)
Error Quit Output Quittieren eines Fehlers, wenn bei „Axis Error“ ein Fehler angezeigt wird.
HW Enable Output Aktiviert die softwareseitige Abschaltrampe, für den Fall das der Enable de-
Software aktiviert wird.
Rampdown 0 Hardware-Rampe
1 Software-Rampe
Seite 50 17.09.2021S-DIAS SCHRITTMOTOR-ENDSTUFE ST 151
HW Rampdown Output Legt die Schrittweite in (Hz * 64 Mikroschritte) der Frequenzverringerung bei
Delta Fre- Ansprechen des Sicherheitseinganges fest.
quency Bei einer Änderung des Wertes wird dieser Asynchrone zum Modul übertra-
gen.
HW Rampdown Output Legt den Zeitabstand zwischen den Frequenzverringerungen nach Anspre-
Delta Time chen des Sicherheitseinganges fest.
Enable Steps Output Legt fest welche Schritte verwendet werden sollen. Der Vollschrittmodus kann
nicht deaktiviert werden.
Bit 1 Vollschrittmodus
Bit 2 Halbschrittmodus
Bit 3 4-Mikroschritte-Modus
Bit 4 8-Mikroschritte-Modus
Bit 5 16-Mikroschritte-Modus
Bit 6 32-Mikroschritte-Modus
Bit 7 64-Mikroschritte-Modus
Frequency Li- Output Legt das Frequenzlimit in [1/64 Hz] bei steigender Frequenz fest, bei dem auf
mit Increase den nächsten Schritt geschalten wird. Wird nur im komplexen Netzwerk an-
gezeigt.
Bei einer Änderung des Wertes wird dieser Asynchrone zum Modul übertra-
gen.
Frequency Li- Output Legt das Frequenzlimit in [1/64 Hz] bei fallender Frequenz fest, bei dem auf
mit Decrease den nächsten Schritt geschalten wird. Wird nur im komplexen Netzwerk an-
gezeigt.
Bei einer Änderung des Wertes wird dieser Asynchrone zum Modul übertra-
gen.
Bei 0 wird das Decrease Limit automatisch aufgrund der „SteppingHysteresis“
Einstellung berechnet.
Maximum Cur- Output Maximalstrom des Ausgangssignals.
rent Bei einer Änderung des Wertes wird dieser Asynchrone zum Modul übertra-
gen.
ACHTUNG: Durch CurrentIncrease kann der Wert um den Faktor sqrt(2) im
Halfstep Modus ansteigen!
Stall Current Property Prozent, um die der maximale Strom im Stillstand reduziert werden soll [0,1
Reduction % von MaxCurrent]. Stillstand bedeutet, der Absolutwert von SetFreqOut ist
kleiner gleich dem eingestellten Stillstandsfenster (StallCurrentWindow), wel-
ches über StallCurrentWindow gesetzt werden kann und Default mäßig auf 0
ist.
Wertebereich 0-1000 (0-100 %).
als Initialisierungswert
Stall Current Property Legt das Fenster für die Reduktion des Stroms bei Stillstand (StallCurrentRe-
Window duction) fest (Standardwert: 0). Ein Wert von z.B. 2 definiert, dass bei einer
SetFreqOut-Servers zwischen -2 und +2 der Stillstandsstrom verwendet wird.
als Initialisierungswert
Enable Regen Property Wird zum Aktivieren des externen Regenerativen Widerstandes verwendet.
Resistor als Initialisierungswert
Property Wird zum Angeben des Widerstandwerts des Regenerativen Widerstands in
Regen Re- [Ohm/10] verwendet. Aufgrund dieser Information wird die Kapazität des Re-
sistance generativen Widerstands berechnet.
als Initialisierungswert
Rated Maximum Property Wird zum Angeben der Leistung des Regenerativen Widerstands in [Watt/10]
Power verwendet. Aufgrund dieser Information wird die Kapazität des Regenerativen
Widerstands berechnet.
als Initialisierungswert
17.09.2021 Seite 51ST 151 S-DIAS SCHRITTMOTOR-ENDSTUFE
Load Threshold Property Legt die Schwelle für die Auslastung des Regenerativen Widerstands in [%]
Warning an, ab dem eine Warnung gesetzt wird.
als Initialisierungswert
Load Threshold Property Legt die Schwelle für die Auslastung des Regenerativen Widerstands in [%]
Bridge an, ab dem die H-Brücke deaktiviert wird.
Bei Erreichen dieser Schwelle wird die H-Brücke abgeschalten.
als Initialisierungswert
Load Threshold Property Legt die Schwelle für die Auslastung des Regenerativen Widerstands in [%]
Resistor an, ab dem der Regenerative Widerstand abgeschalten wird.
Bei Erreichen dieser Schwelle wird die H-Brücke und der Regenerativen Wi-
derstands abgeschalten.
als Initialisierungswert
Stepping Hyste- Property Legt die Hysterese in [1/64 Hz] für die „DecreaseLimits“ fest, falls diese auto-
resis matisch berechnet werden (DecreaseLimit = 0).
als Initialisierungswert
Compatibility Property Kompatibilitätsmodus zu VST01x.
Mode VST 0 Frequenz als 64 Mikroschritte - Standard
1 Frequenz als 32 Mikroschritte
Diese Einstellung wirkt sich auf alle "FrequencyLimitsIncrease", "Frequency-
LimitsDecrease", "SetFreqOut" „ActPosition“ und „LatchPositionInput1/2“-
Server aus, falls der „Latch Type“ = 0 ist.
als Initialisierungswert
Use Oszi Property Wird zum Aktivieren der Oszilloskop Funktion benötigt. Um die Oszi Funktion
zu verwenden müssen die Methoden "StartMeasure()" und "GetMea-
sureState()" verwendet werden.
als Initialisierungswert
Seite 52 17.09.2021Sie können auch lesen