Die Realisierung von Robotik und Mechatronik Tele-Experimenten via Internet für internationale Studenten
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Global J. of Engng. Educ., Vol.10, No.3 © 2006 UICEE
Published in Australia
Die Realisierung von Robotik und Mechatronik Tele-
Experimenten via Internet für internationale Studenten
Florian Zeiger
Marco Schmidt
Klaus Schilling
Institut für Informatik - Robotik and Telematik, Universität Würzburg
Am Hubland, D-97072 Würzburg, Deutschland
In der Ausbildung von Ingenieuren bilden Experimente mit realer Hardware eine wichtige Ergänzung
und eröffnen schon während des Studiums interessante Perspektiven. Dieser Beitrag beschreibt
die Implementierung eines virtuellen Labors mit Hardware-Experimenten im Bereich der Mechatronik,
welche von vier Universitäten in Deutschland, Spanien und Indien betrieben wird. Im Rahmen
dieses virtuellen Labors werden Tele-Experimente zur Steuerung realer Roboter über das Internet
bereitgestellt. Sowohl die Experimente, als auch die nötige Hardware-Infrastruktur sowie die logischen
und softwaretechnischen Architekturen, wie z.B. die verwendeten Datenbanken und Dienste, für
den verteilten Zugriff auf die Ressourcen werden detailliert beschrieben. Am Beispiel von
Experimenten mit mobilen Robotern werden dann Details der technischen Umsetzung ausführlich
dargestellt. Zum Ende des Artikels werden Erfahrungen aus dem internationalen Betrieb der Tele-
Experimente zusammen mit indischen Partnern dargestellt.
EINLEITUNG Experimenten mit realer Roboter Hardware [12-16].
Dabei bieten mobile Roboter ein motivierendes
Der enorme Anstieg der Kommunikations- interdisziplinäres Arbeitsgebiet, in dem theoretisch
möglichkeiten im modernen Internet ermöglichte in den erarbeitetes Hintergrundwissen direkt in die Praxis
letzten Jahren eine rasante Weiterentwicklung, auch überführt werden kann [12].
im Bereich der Teleausbildung. Diese Entwicklung Dieser Artikel präsentiert das Internationale
zusammen mit dem Fortschritt im Bereich der Virtuelle Labor für Mechatronik, für das Partner
Informatik und der Telekommunikation ermöglichten aus Europa (Bayerische Julius-Maximilians Universität
so eine Umsetzung von Tele-Experimenten mit realer Würzburg - Deutschland und Universidad Carlos III
Hardware. In vielen Bereichen wurde in den letzten de Madrid - Spanien) und Indien (Anna University in
Jahren eine Reihe von Onlinevorlesungen und Chennai und Thiagarajar College of Engineering in
Onlineprüfungssystemen entworfen. In dem Bereich Madurai) acht eigenständige Lerneinheiten im Bereich
der Ingenieurs-Ausbildung sollten jedoch darüber Robotik und Regelungstechnik entworfen und
hinaus auch Hardware-Experimente hinzukommen. umgesetzt haben. Alle Lerneinheiten bestehen aus
Hier spielt das Arbeiten und Experimentieren mit realer einem Experiment in dem ein realer Roboter über das
Hardware eine Schlüsselrolle, wobei deren reale Internet gesteuert wird. Um Tele-Experimente mit
Umsetzung anspruchsvolle Fragestellungen aufwirft realer Hardware über große Distanzen und im
[1]. In den letzten 15 Jahren wurden nun viele internationalen Kontext bereitzustellen stellte dabei
Bemühungen unternommen, um Techniken zur mehrerer zu erfüllende Anforderungen an die
Fernsteuerung von Robotern über das Internet zu Projektpartner. Zum einen musste eine Struktur
entwickeln [2][3]. Im Jahre 2000 wurden diese geschaffen werden, die eine einfache Betreuung der
Ansätze in verschiedenen Projekten auf ganze Studenten sowohl am Ort des angebotenen
Lerneinheiten erweitert [4-11]. Seit Mitte der neunziger Experimentes, als auch an entfernten Standorten
Jahre arbeitet unser Team an derartigen Tele- erlaubt, da auch bei Tele-Experimenten eine
245
246 F. Zeiger, M. Schmidt & K. Schilling
Unterstützung der Studenten durch Tutoren notwendig zum Betrieb der verteilten Hardware-Ressourcen. Am
ist. Dies umfasst verschiedene Datenbanken, Server Ende des Artikels werden die Erfahrungen aus dem
mit den dazugehörigen Diensten und auch Betrieb des Tele-Labors beschrieben.
Möglichkeiten den Zustand des gesamten Systems zu
überwachen. Weiterhin muss auch eine geeignete DIE EXPERIMENTE DES
Infrastruktur und Architektur für das Betreiben des INTERNATIONALEN TELE-LABORS
virtuellen Labors bestehen, da hier Experimente, die FÜR MECHATRONIK
an verschiedenen Standorten betrieben werden
integriert werd und dazu auch eine gemeinsame Im Rahmen des European Cross Cultural Program
Benutzer- und Ressourcenverwaltung erforderlich ist. wurde ein internationales Tele-Labor für Mechatronik
Zum anderen stellen die Großen Distanzen der weltweit entwickelt. Jedes der Experimente ist als eigenständige
verteilten Standorte besondere Schwierigkeiten im Lerneinheit zu einem bestimmten Themengebiet
Bezug auf Verlässlichkeit, Bandbreite und konzipiert worden und folgt einer standardisierten
Geschwindigkeit der Kommunikationsverbindung dar. Prozedur. Nachdem sich der Student für einen
Die Experimente wurden alle in die in Abbildung 1 bestimmten Kurs registriert hat stehen ihm die kurs-
gezeigte Architektur integriert. Im Falle der spezifischen Experimente zur Verfügung. Für jedes
beschriebenen Experimente bestand eine der größten Experiment steht ein Tutorial mit dem nötigen
Herausforderungen in einer Anpassung an die Qualität Fachwissen und eine Experimentbeschreibung zum
und Verfügbarkeit der Internetverbindungen. Herunterladen bereit. Nachdem der Student sich das
Möglichkeiten zur Durchführung von Experimenten nötige Wissen aus dem Tutorial und bei Bedarf auch
mit einer großen Verzögerung in der aus weiterführender Literatur angeeignet hat, muss
Kommunikationsverbindung oder einer beschränkten dann ein kurzer Test absolviert werden. Dieser Test
Bandbreite bieten geeignete Lösungen um diese besteht aus einigen multiple-choice Fragen zum
Experimente weltweit von jedem Ort mit einer Thema, von welchen eine bestimmte Anzahl korrekt
verfügbaren Internetverbindung aus durchzuführen beantwortet werden muss. Dieser Online-Test gibt dem
[17][18]. Studenten sofort eine Rückmeldung über seinen
Im Folgenden wird zuerst eine kurze Übersicht aktuellen Wissensstand und kann bei Bedarf bis zu
über die verfügbaren Experimente gegeben. Die dreimal wiederholt werden bevor der Tutor über den
weiteren Abschnitte beschreiben die nötigen Misserfolg unterrichtet wird. Nach dem erfolgreichen
Voraussetzungen für ein internationales Tele-Labor und Absolvieren dieser Prüfung kann dann Zeit zum
die damit verbundenen technischen Notwendigkeiten Experimentieren mit der Hardware reserviert werden.
Abbildung 1: Tele-Labor Architektur.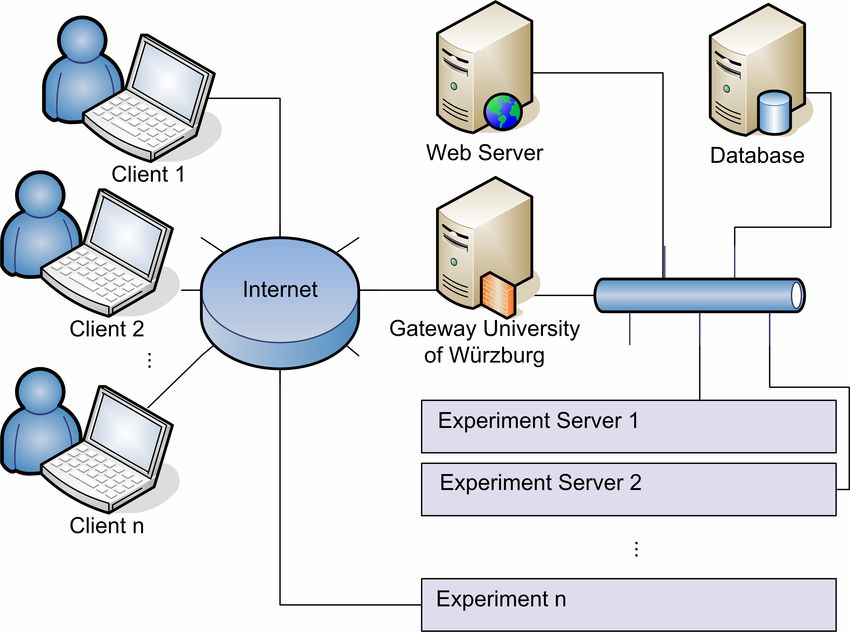
Die Realisierung von Robotik und Mechatronik... 247
Sobald die Zeitreservierung gültig wird, kann der stration der inversen Kinematik dieses Roboters
Student ein Steuerprogramm starten, welches die verwendet. Zuerst werden einzelne Bewegungen zu
Steuerung des Roboters erlaubt und die für das primitiven Manövern, wie der Drei-Punkt-Wende oder
Experiment wichtigen Sensordaten zur Verfügung dem seitlichen Verschieben kombiniert. Im nächsten
stellt. Schritt werden primitive Manöver zu komplexeren
Der Lehrstuhl für Robotik und Telematik der kombiniert um eine gewünschte Zielposition zu
Universität Würzburg entwickelte Experimente zur erreichen. Die aus diesen Bewegungen gewonnenen
Kinematik und zur Pfadplanung mobiler Roboter: Sensordaten werden dann zu einer detaillierten
Fehleranalyse herangezogen. Den Studenten sollen so
Kinematik von mobilen Robotern die komplexen Fragestellungen der inversen Kinematik
bei mobilen Robotern und eine Fehlerfortpflanzung
Dieses Experiment behandelt die Grundlagen der näher gebracht werden.
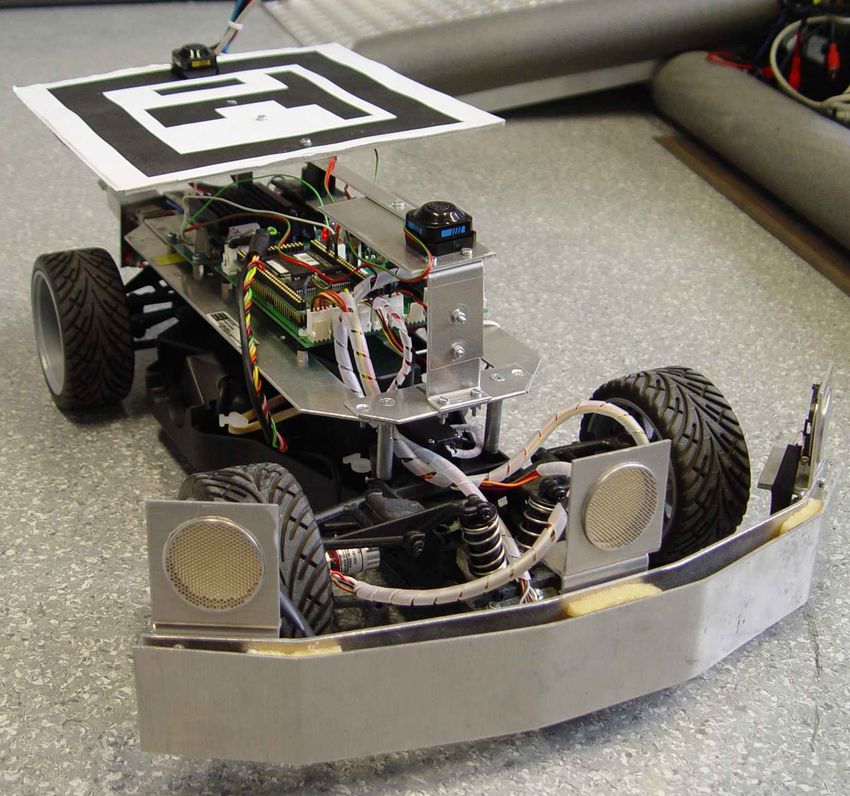
Kinematik von mobilen Robotern. Es wird hier ein Der spanische Projektpartner, das Department of
MERLIN Roboter (Mobile Experimental Rover for System and Automation Engineering der Universidad
Locomotion and Intelligent Navigation, siehe Abbildung Carlos III de Madrid entwickelte ebenfalls
2) verwendet, der, wie bei einem gewöhnlichen Auto, Experimente zum Themengebiet der mobilen
an der Vorderachse lenkbare Räder besitzt und über Roboter. Hier wurde allerdings ein anderer Typ von
die Hinterachse angetrieben wird. Bei diesem Roboter verwendet. Der MAGGIE (siehe
Robotertyp können die nicht holonomischen http://roboticslab.uc3m.es/) ist ein mobiler Roboter mit
Bewegungsbeschränkungen sehr einfach demonstriert Differentialantrieb, welcher einer anderen Kinematik
werden. Eine genauere technische Beschreibung des als der im vorangegangenen Absatz beschriebenen
MERLIN Roboters steht unter [19] zur Verfügung. MERLIN folgt. Bei den zwei folgenden Experimenten
Ein Schwerpunkt dieser Hardware Experimente liegt liegt der Schwerpunkt auf der Sensordatenverarbeitung
in der Ausarbeitung und dem Verständnis der und der Roboternavigation.
idealisierten theoretischen Modelle und den in der
Realität existierenden Abweichungen davon. Die Ereigniserkennung
durch die Experimente gewonnenen Sensordaten
können dann zur Verbesserung der Genauigkeit und In diesem Experiment soll der Roboter mit Hilfe seines
der mathematischen Modellierung herangezogen Laserscanners eine Türe erkennen. Die Studenten
werden. sollen den Roboter in einem Labor frei bewegen und
die gewonnenen Sensordaten geeignet auswerten.
Pfadplanung eines Mobilen Roboters Dazu müssen sie Algorithmen zur Erkennung von
Türen und Hindernissen entwickeln welche sie dann
Auch im Pfadplanungsexperiment wird der MERLIN auch auf dem Roboter ausprobieren können. In diesem
Roboter mit seiner Ackerman-Steuerung zur Demon- Experiment wird dann deutlich welche Filter- und
Messmethoden nötig sind um die rohen Messdaten
überhaupt in eine für die Algorithmen geeignete Form
zu bringen.
Topologische Navigation
Das Experiment zur topologischen Navigation
verwendet einen Algorithmus zur Türenerkennung um
einfache Navigationsaufgaben wie das Bewegen des
Roboters zu einer Türe und das anschließende
Durchqueren dieser Türe. Dabei kann sich der Roboter
frei im Raum bewegen und die Studenten müssen die
zur Verfügung stehenden Sensordaten in geeigneter
Weise verwenden um die Problemstellungen dieser
Navigationsaufgabe zu lösen.
Der indische Projektpartner in Chennai, das
Department of Mechanical Engineering der Anna
University, entwickelte zwei Experimente im Bereich
Abbildung 2: Der MERLIN Roboter. der Regelungstechnik. Jedes der Experimente beleuchtet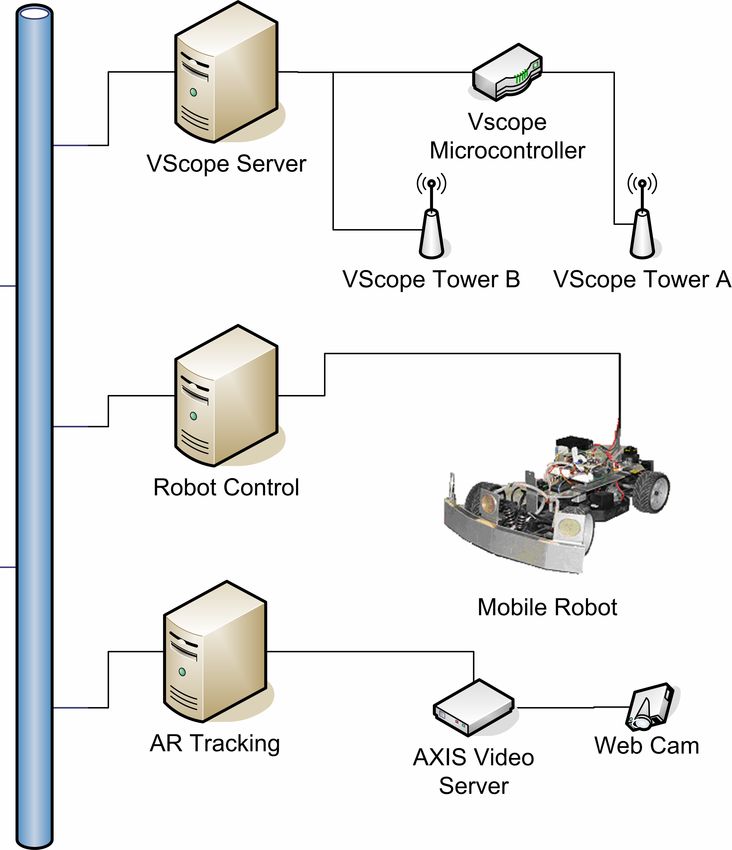
248 F. Zeiger, M. Schmidt & K. Schilling
ein Teilsystem komplexer industrieller Fertigungs- Analyse der Wiederholbarkeit von
maschinen wie zum Beispiel einer Fräse oder eines Bewegungen von Robotern
Manipulatorarmes:
Hier ist das Ziel eine Auswertung der Wiederholbarkeit
Motor Regelung und der Genauigkeit von Bewegungsabläufen eines
mobilen Roboters. Dazu werden Techniken aus dem
In Fertigungsanlagen werde oft CNC-Fräsen Bereich Computer Vision eingesetzt. Der
eingesetzt. In diesen Fräsen müssen Elektromotoren Experimentaufbau besteht aus einem mobilen Roboter
genau gesteuert werden um geeignete Drehzahlen zu und einer hoch auflösenden Kamera die über der
halten. Dieses Experiment bringt den Studenten die Experimentierfläche montiert ist. Die Sensordaten
Grundlagen der Regelung von Elektromotoren und verschiedener Bewegungen werden aufgezeichnet und
Schrittmotoren näher. Auch hier steht dem Studenten der Student muss diese dann im Hinblick auf
eine Bedienoberfläche zur Verfügung, über die er alle Genauigkeit und Wiederholbarkeit analysieren.
Sensordaten auswerten und dem Motor Steuerbefehle
geben kann. VORAUSSETZUNGEN FÜR TELE-
EXPERIMENTE
Fernsteuerung eines Roboter-Arms
Um nun die möglichen Vorteile von Tele-Experimenten
Das zweite Experiment der Anna University nutzen zu können müssen zuerst einmal einige
verwendet den Roboter aus Abbildung 3. Die Voraussetzungen technischer und infrastruktureller Art
Studenten können kleine Steuerprogramme schreiben erfüllt sein. Wichtig für einen zuverlässigen Betrieb
und die einzelnen Gelenke so ansteuern dass sie sind Sicherheitsaspekte. Diese betreffen zum einen
einfache Aufgaben wie z.B. das Heben und Bewegen den Roboter, d.h. der Roboter muss durch
von Gegenständen ausführen können. mechanische, elektronische und softwaretechnische
Der zweite indische Partner, das Department of Sicherheitsmaßnahmen so abgesichert werden, dass
Computer Science and Engineering des Thiagarajar auch durch eine gegebenenfalls absichtliche
College of Engineering in Madurai, stellt ein Experi- Fehlbedienung weder der Roboter noch die Umwelt
ment mit einem kleinen Roboter mit Differentialantrieb, in irgendeiner Weise Schaden nimmt. So muss z.B.
dem Boe Bot, und ein Experiment zum Thema Com- der Fall behandelt werden, in dem der Roboter
puter Vision zur Verfügung. absichtlich gegen ein Hindernis gesteuert wird.
Weiterhin müssen Schutzmaßnahmen vorhanden sein,
Wandverfolgung dass der Motor keinen Schaden nimmt oder die
Geschwindigkeit des Roboters bei der Hindernis-
Das Ziel dieses Experimentes ist es mit verschiedenen berührung nicht zu hoch ist.
Algorithmen eine Wandverfolgung des Boe Bots zu Zum anderen müssen auch die Sicherheitsaspekte
ermöglichen. Den Studenten werden eine der Software des gesamten Tele-Experiment Portals
Programmier-schnittstelle und eine Sensordaten- berücksichtigt werden. Da Studenten hier anerkannte
schnittstelle zur Verfügung gestellt welche über das Prüfungsleistungen ablegen, müssen auch
Internet bedient werden kann. Vorkehrungen getroffen werden um allen Prüflingen
gleiche Bedingungen zu garantieren. Ein
Betrugsversuch muss daher erkannt und verhindert
werden. Auch verursacht der große Vorteil der
immerwährenden weltweiten Verfügbarkeit einige
Probleme. So wird es sich nur um eine Frage der Zeit
handeln bis Hacker versuchen sich Zugang zu der
Roboter Hardware zu verschaffen. Auch dieses
Szenario muss bedacht werden und schon im Voraus
Mechanismen implementiert werden um solche
Angriffe zu erkennen und gegebenenfalls zu
verhindern.
Ein völlig anderer Aspekt ist der große Aufwand
um die Experimentier-Hardware zu Warten und zu
Pflegen, sowie der Administrationsaufwand zum
Abbildung 3: Manipulatorarm an der Anna University. Verwalten der Studentenzugänge. So müssen für die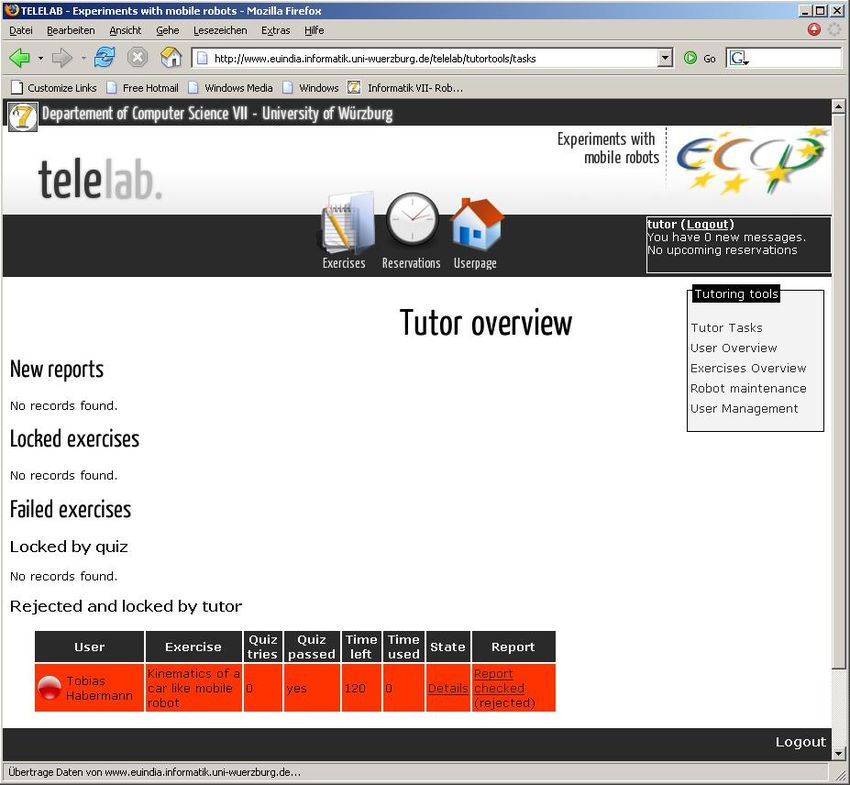
Die Realisierung von Robotik und Mechatronik... 249
Administratoren geeignete Schnittstellen zur Techniken wie e-mail oder ein in das System
Verfügung stehen, um den Verwaltungsaufwand in integriertes Messaging zwischen dem Tutor und
einem erträglichen Maß zu halten. Das gleiche gilt den Studenten.
auch für die Tutoren der einzelnen Kurse. Auch hier Der letzte zu berücksichtigende Aspekt betrifft die
darf der administrative Aufwand nicht unterschätzt Umsetzung des Experiments selbst. Die verschiedenen
werden. Diese Punkte sollten unbedingt beachtet am Experiment beteiligten Komponenten (Hardware
werde da sonst einer der großen Vorteile - das und auch Anzeigeelemente auf der Benutzer-
effektive Nutzen der Hardware und die damit schnittstelle) sollten so zu bedienen sein, dass eine
verbundene Zeitersparnis - nicht ausgenutzt werden intuitive Steuerung der Hardware möglich ist und sich
können. Um dies zu erreichen wurde im präsentierten die Studenten voll und ganz auf den Lerninhalt
Tele-Labor eine flexible Zuordnung von Tutoren, des Experiments konzentrieren können.
Lehrern und Studenten ermöglicht. So können die Auch die Tutorials spielen hier eine große Rolle -
involvierten Tutoren einen schnellen Überblick über je besser deren Struktur, umso leichter wird der
den Lernfortschritt der zu betreuenden Studenten Student durch das Experiment geführt, was gleich-
erlangen. zeitig auch zu einer Entlastung des Tutors führt. Da
Die dritte wichtige Voraussetzung ist die nötige man allerdings nicht voraussetzen kann, dass alle
Flexibilität des Systems. Um das Verteilte Entwickeln Studenten über den gleichen Wissensstand verfügen
und Bereitstellen der Experimente zu ermöglichen und wurde im vorliegenden Tele-Labor folgender Ansatz
um hohe Kosten bei der Erweiterung des gewählt: Die Tutorials geben eine kurze Darstellung
Kursangebotes zu vermeiden ist zwingend ein über das benötigte Wissen. Sollte das Wissen schon
modularer Aufbau mit der damit verbundenen vorhanden sein können diese Kapitel übersprungen
Definition der Schnittstellen notwendig. Hier spielen werden. Für den Fall dass noch Nachholbedarf besteht,
die festgelegten Schnittstellen zusammen mit einer ist zu den einzelnen Themengebieten noch
logischen Trennung der experimentellen und der weiterführende Literatur aufgeführt.
administrativen Seite eine tragende Rolle. Nur so lässt
sich das Ziel eines von Ort und Zeit unabhängigen DIE ARCHITEKTUR - INFRASTRUKTUR
Bedienens des Experimentes vom Studenten
realisieren. Zusätzlich müssen auch noch ganz Um den im folgenden Abschnitt beschriebenen
alltägliche Dinge wie z.B. die Unabhängigkeit vom logischen Aufbau zu realisieren ist ein gewisses
Betriebssystem des Benutzerrechners oder dessen Minimum an Infrastruktur nötig. Grundlegende
Computerarchitektur bedacht werden. In der Eigenschaften wie Skalierbarkeit, Zuverlässigkeit und
vorliegenden Architektur wurde deswegen ein vertretbarer Verwaltungsaufwand, sowie der
großer Wert auf die Bedienbarkeit über einen modulare Aufbau der gesamten Architektur sind hierbei
gewöhnlichen Web-Browser gelegt, da in diesem unabdingbar. Abbildung 1 zeigt die Hauptbestandteile
Bereich eine systemübergreifende Standardisierung des realisierten Systems. Die Systeme aus früheren
schon soweit fortgeschritten ist, um die Projekten wurden weiterentwickelt um die nötige
problemlose Bedienung auf allen Benutzerrechnern zu höhere Modularität für den geplanten internationalen
garantieren. Einsatz in Verbindung mit der verteilten Bereitstellung
Auch muss in Bezug auf die benutzerfreundliche zu erreichen [15][16].
Auslegung des Angebotes eine möglichst flexible Die im folgenden Abschnitt beschriebene logische
Buchung der einzelnen Reservierungszeiträume Komponente ist dabei auf einem Web-Server realisiert
möglich sein. Ebenfalls muss man sich auch über die worden. In Verbindung mit dem Datenbank-Server
Rolle der Tutoren in diesem System klar werden. Bei können so das zentralisierte Resource-Management,
einer durchgehenden Verfügbarkeit haben Erfahrungen die Benutzerverwaltung, die Authentifizierung, das
aus deutschlandweit angebotenen Experimenten Überwachen des Lernfort-schritts der Studenten, die
gezeigt, dass die Roboter zu jeder Tages- und Nachtzeit Zugangskontrolle und die Administration des
benutzt werden. eingesetzten Portals relativ problemlos bereitgestellt
Bei dem hier bereitgestellten weltweiten Zugang werden. Wie man auch noch in Abbildung 1 sehen
und bei der Benutzung der Experimente durch kann sind die einzelnen Experiment Module völlig
Studenten auf verschiedenen Kontinenten und somit eigenständig. Sie benötigen so lediglich eine
auch aus verschiedenen Zeitzonen werden die Internetverbindung und eine übersichtliche
Roboter rund um die Uhr im Betrieb sein. Somit Schnittstelle für die benötigte Authentifizierung - diese
bleibt als einzige sinnvolle Art den Tutor einzubinden wird in einem der folgenden Abschnitte genauer
eine asynchrone Kommunikation über bewährte beschrieben.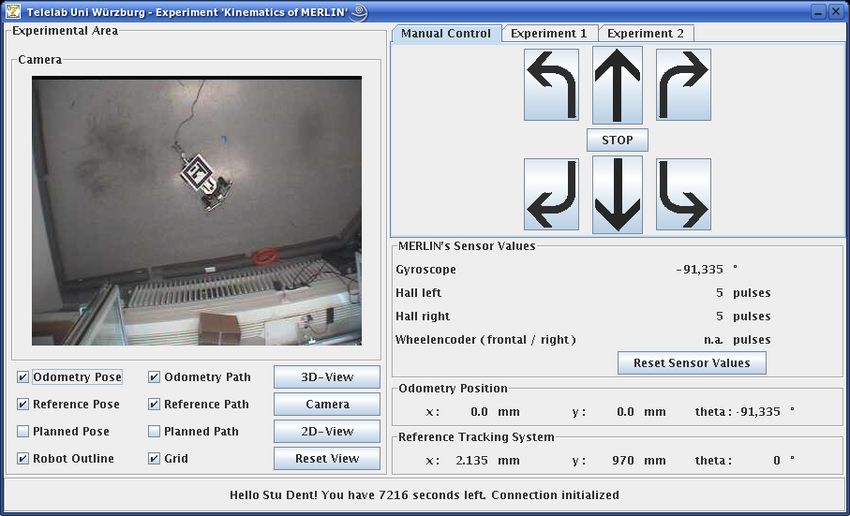
250 F. Zeiger, M. Schmidt & K. Schilling
DIE VERWALTUNG - DER LOGISCHE Ein wichtiges Attribut ist der Typ der Ressource.
AUFBAU Es gibt zum einen multiple use und zum anderen
exclusive resource. Eine Resource vom Typ
Die Schlüsselkomponente des vorgestellten Tele- exclusive resource kann nur von einem Studenten zur
Labors ist der implementierte logische Aufbau gleichen Zeit genutzt werden - d.h. sollte nur ein
(administrative framework). Dieser Abschnitt wird Exemplar eines bestimmten Roboters zur Verfügung
eine kurze Übersicht über die wichtigsten stehen, wäre dieser natürlich vom Typ exclusive
Funktionalitäten geben welche den Grundstein für die resource. Der Typ multiple use wurde eingeführt um
benötigte Flexibilität und Skalierbarkeit legen. In z.B. entwickelte Simulationsprogramme, die in
Abbildung 4 werden die Beziehungen der wichtigsten mehreren Instanzen laufen können, von mehreren
Komponenten des logischen Aufbaus beschrieben. Auf Studenten gleichzeitig ausführen zu lassen.
der untersten Ebene befinden sich die Ressourcen - Die Experimente selbst werden in der komponente
in unserem Fall sind dies die Roboter. Eine Ressource Experiments repräsentiert. Hier wird dann auch die
kann einer Anzahl Experimenten zugeordnet werden, benötigte Hardware (Resources) mit den
wobei ein Experiment immer nur eine Ressource entsprechenden Beschreibungen und des Tutorials des
besitzen darf. Experiments in Verbindung gebracht.
Abbildung 4: Die wichtigsten Beziehungen im logischen Aufbau.Die Realisierung von Robotik und Mechatronik... 251
Auf der nächsten Ebene befinden sich die einem oder mehreren der vorerst acht erstellten
Komponenten Student Groups, Experiment Groups Experimente, wobei dann ein Kurs von ebenfalls
und Timeslot. Die Komponente Experiment Groups mehreren Studentengruppen genutzt werden kann.
dient dazu einen Kurs mit einer bestimmten Abbildung 5 zeigt die Web-Oberfläche für einen
Kombination von Experimenten zu repräsentieren. Sie Tutor. Hier sieht dieser einen Überblick über alle
enthält Elemente des Typs Experiments und bekommt wichtigen Aktivitäten in der von ihm betreuten Gruppe
einen Tutor zugeordnet - in diesem Fall ist dies dann und erlangt Zugriff auf wichtige Werkzeuge die zum
der Ansprechpartner für technische Probleme. Die Verwalten und Betreuen seiner Gruppe nötig sind.
Komponente Student Groups wird zur Erfassung des So kann in diesem Portal je nach Berechtigung auf
Kurses verwendet. Je nach Teilnehmeranzahl werden Teile der Benutzerverwaltung, die Übersicht über den
hier dann Tutoren zur fachlichen Betreuung Zustand der relevanten Hardware, die Aufgaben-
zugeordnet. Timeslot repräsentiert ein reserviertes verteilung und deren Verwaltung zugegriffen werden.
Zeitintervall für ein Experiment. Die Rechtevergabe über die jeweiligen
Es ist genau einem Student, ein Experiment und Funktionalitäten wird von zuständigen Personen aus
eine Ressource zugeordnet. Bei der Implementierung der Administratoren-Gruppe vorgenommen.
ist auch zu beachten dass hier sowohl der Typ der
Ressource als auch die Verfügbarkeit zur gewünschten BEISPIELIMPLEMENTIERUNG EINES
Zeit beachtet werden muss, da eine Ressource ja auch EXPERIMENTS AN DER JMUW
durchaus von mehreren Experimenten genutzt werden
kann. Für die Implementierung eines Experimentiermoduls
Des Weiteren existieren auch noch Komponenten werden mindestens ein Internetzugang und eine
für die Studenten (Students), Tutoren (Tutors) und logische Einheit, der robot control server, benötigt
Administratoren (Administrators). Students enthält [18]. Der robot control server ist für die Verarbeitung
alle persönlichen Informationen über den registrierten der Steuerkommandos zuständig, welche er über das
Studenten wie z.B. die zugeordnete Universität, der Internet von dem experimentierenden Studenten
Name und der jeweilige Kursname. Die Tutors- empfängt. Die Verarbeitung umfasst dabei mehrere
Komponente enthält den Namen des Tutors und den Teilschritte, wie Umsetzung von Steuerkommandos,
zugeteilten Kurs. Die Administratoren sind berechtigt Weiterleitung von Nachrichten und Auswerten von
die Tutor-Kurs Zuordnungen und die Studenten- Sensorwerten. Als Schnittstelle zum robot control
Zuordnungen indirekt festzulegen. Im Vergleich zu server wurde eine spezielle Anwendung entworfen,
früheren Implementierungen verfügt das hier die es dem Studenten ermöglicht die gewünschten
präsentierte System über viele Verbesserungen, die Befehle einzugeben und die empfangenen Sensorwerte
es zu einem mächtigen Werkzeug zum weltweiten des Roboters zu überprüfen, weiterhin ist die
Anbieten von Hardware-Experimente mit einem Anwendung für die Authentifizierung zuständig. Diese
geringen Verwaltungsaufwand und der geforderten ist besonders wichtig, da sie den unrechtmäßigen
Skalierbarkeit machen [16]. Die vorgestellte modulare, Gebrauch der Hardware durch Dritte verhindert und
aber dennoch übersichtliche Architektur, ermöglicht so auch erst die Koordination von vielen Studenten
ein leichtes Erstellen von verschiedenen Kursen mit ermöglicht. Für die Implementierung der
Authentifizierung steht das authentication interface
des administration framework zur Verfügung. Um
diese Schnittstelle der Authentifizierung möglichst
flexibel zu halten und den hohen Sicherheits-
anforderungen der Hardware zu genügen, wurde der
Authentifizierungsmechanismuns auf Basis des http
Protokolls aufgebaut. Eine weitere Schnittstelle zur
Kommunikation mit den Studenten ist das eingebaute
Prüfungsfragen-System. Damit ein Student den
Zugang zu einem Experiment erhält, muss er sich
zunächst in den zu erarbeitenden Lerninhalt einlesen.
Zu diesem Zweck können individuell gestaltete
Tutorials im administration framework von der
Universität bereitgestellt werden. Mit Hilfe einfacher
Prüfungsfragen soll der gelesene Inhalt abgefragt
Abbildung 5: Tutoren Web-Oberfläche. werden. Auf diese Weise wird verhindert, dass252 F. Zeiger, M. Schmidt & K. Schilling
Studenten unvorbereitet die Experimente beginnen und
dafür Zeit reservieren. Die Prüfungsfragen müssen
im XML Format angelegt werden und können so vom
administration framework selbstständig für den Test
benutzt werden. Bis auf diese wenigen Schnittstellen
können die teilnehmenden Partner-Universitäten die
Gestaltung ihrer Experimentiermodule vollkommen
selbst bestimmen, die Schnittstellen dienen lediglich
der Erleichterung ansonsten aufwendiger Arbeits-
schritte, sowie der Koordination der Studenten. Der
folgende Abschnitt beschreibt im Detail die
Realisierung des Experimentmoduls der Julius
Maximilians Universität Würzburg.
In der Realisierung des Experiments an der
Universität Würzburg sind ebenfalls die oben
genannten Schnittstellen implementiert, dabei wurde
strikt auf die Trennung des Experimentiermoduls und
des administration framework geachtet. Die
abstrakte Darstellung der Architektur ist in Abbildung
6 gezeigt. Das Experimentiermodul an sich ist
wiederum in drei große Teile untergliedert. Teil 1
umfasst die Hardware, in diesem Fall den Roboter
MERLIN und die Steuerungseinheit (robot control). Abbildung 6: Experimentaufbau.
Mit Hilfe der robot control Komponente kann der
MERLIN Roboter über das Internet gesteuert werden. Der letzte und wichtigste Teil ist der robot control
Sie übersetzt hierfür Befehle aus dem Internet (über server (siehe Abbildung 7), welcher die Software und
TCP/IP) in Befehle für MERLIN (über serielle Hardware Komponenten organisiert und
Schnittstelle). Teil 2 besteht aus verschiedenen Sen- synchronisiert. Das Organisieren umfasst zum einen
sor Komponenten, die das Experiment überwachen das Sammeln von Sensorwerten und deren
und Werte zum Ablauf des Experiments aufzeichnen. Weiterleitung an den Benutzer, sowie auch die
Abbildung 7: Der Robot Control Server in Würzburg.Die Realisierung von Robotik und Mechatronik... 253
Weiterleitung von Steuerkommandos an die Hardware. oberfläche (GUI) für jedes Experiment zur Verfügung
Die Funktionen des robot control server müssen stellen, um den Anforderungen des Experimentier-
deshalb besonders zuverlässig sein, da nur durch ablaufs möglichst gut zu entsprechen. Durch die
seine korrekte Arbeitsweise ein reibungsloser Möglichkeit neue Module in die Experimentier-
Experimentierablauf garantiert werden kann. umgebung zu integrieren, können so auch verschiedene
Zusätzliche Aufgabe des robot control server ist Testreihen mit dem gleichen robot control server
das Ausführen der Authentifizierungsprozedur. Ein durchgeführt werden.
sehr nützliches Feature, das weiterhin integriert In Abbildung 7 wird dieses Modul mit experiment
wurde, ist das eigenständige Erkennen von Fehlern, module bezeichnet, es besitzt eine Instanz des Objekts
welche das System zu einer Benachrichtigung des Client Connection Module, welches sich mit dem
Administrators veranlassen. So können auftretende spezifischen Client Programm verbinden kann. Eine
Fehler (z.B. Ausfall der Stromversorgung) schnell detaillierte Beschreibung der Anforderungen, des
erkannt und behoben werden um den regelmäßigen Entwurfs und der Implementierung des robot con-
Betrieb wieder aufnehmen zu können. Die komplette trol server wird in weiteren technischen Veröffent-
Architektur des Systems wurde in Java geschrieben lichungen publiziert. Teil 3 des Systems, die Sensorik,
und ist so unabhängig von dem zugrunde liegenden wird benutzt um den Benutzer einen Eindruck von der
Betriebssystem. Für das International Virtual Experimentierumgebung zu vermitteln. Dabei werden
Laboratory on Mechatronics wurde eine SuSe Linux verschiedene Arten von Sensoren eingesetzt um den
Distribution als Betriebssystem gewählt. Benutzer über die Position und Status des Roboters
Ein besonderes Merkmal des robot control server zu informieren. Darunter befinden sich Hall Sensoren,
ist die Möglichkeit ihn für verschiedene Experimente Gyroskop und Ultraschallsensoren auf dem mobilen
einsetzen zu können. Natürlich können nicht zwei Roboter.
Experimente mit der gleichen Roboterhardware Weiterhin werden zwei verschiedene Systeme zur
gleichzeitig durchgeführt werden, aber es ist möglich genauen Positionsbestimmung des Roboters
für Experimente mit komplett unterschiedlichen bereitgestellt. Dies ist zum einen ein Vscope, welches
Lerninhalten diese eine Hardware zu verwenden. Das sehr präzise mit Infrarotsensoren die Position und
modulare Design (siehe Abbildung 7) ermöglicht den Orientierung des Roboters messen kann, zum anderen
Einsatz in verschiedenen Experimenten. Normalweise eine Webcam die ebenfalls eine Positionsbestimmung
sollte ein Experiment eine spezialisierte Benutzer- ermöglicht [17]. Eine automatische Nachführung der
Abbildung 8: Bedienoberfläche mit Videobild.254 F. Zeiger, M. Schmidt & K. Schilling
Abbildung 9: Bedienoberfläche mit 2D Experimentumgebung.
Kamera bei Bewegung des Roboters ist implementiert, ZUSAMMENFASSUNG
zusätzlich wird das Kamera Bild über das Internet zum
Benutzer übertragen. Die hier vorgestellte Plattform verbindet die Vorteile
des Tele-learnings mit der hardware-nahen Arbeit an
GESAMMELTE ERFAHRUNGEN Experimenten. Unter dem Namen International
Virtual Laboratory on Mechatronics stellen
Bei dem präsentierten internationalen Projekt mussten verschiedene Universitäten aus Indien, Spanien und
insbesondere noch neue Probleme hinsichtlich Deutschland Studenten aus aller Welt neue
Beschränkungen in der Kommunikationsverbindung Möglichkeiten des Studiums zur Verfügung. Die
berücksichtigt werden - im Gegensatz zu inner- Lerninhalte sind überall und ständig verfügbar. Es wird
europäischen Verbindungen, die sich durch kurze so eine effiziente Nutzung von hochwertiger Hard-
Verzögerungszeiten, kaum Paketverluste und einer ware zu Ausbildungszwecken ermöglicht. Die durch
großen Bandbreite auszeichneten. Gerade die die großen Distanzen auftretenden Probleme - von
durchschnittliche Verzögerung und Paketfehlerrate bei der Betreuung der Studenten, über die Verwaltung der
Verbindungen zwischen Europa und Indien schränkten verteilten Hardware-Komponenten bis hin zu
das Design der Experimente für Tele-Labors zusätzlich Problemstellungen im Bereich der Kommunikations-
ein. verbindung, lassen sich mit dem hier vorgestellten
Das Problem einer zu geringen Bandbreite konnte Framework lösen.
gelöst werden, indem der bandbreiten-intensive Video- Die modulare Struktur des Systems erlaubt ein
Stream durch eine virtuelle Darstellung des Experi- individuell zugeschnittenes Design der Lerneinheiten
ments ersetzt wurde [17]. Um dabei eine möglichst für die Anforderungen der zugrunde liegenden
detailgetreue Darstellung zu erzeugen, werden die Telekommunikationsstruktur. Alle Experimente können
Positionsdaten der Sensoren für diesen Zweck daher auch leicht zu verschiedenen Zwecken
eingesetzt (vgl. Abbildung 8 und Abbildung 9). Als kombiniert werden, wie beispielsweise bei virtuellen
weitaus schwierigere Probleme erweisen sich die Klassenräumen oder Tele-Praktika. Die Betreuung der
auftretenden Paketfehler und die große Verzögerung Experimente kann dabei ebenfalls individuell durch
in den Griff zu bekommen. Hier wird in Zukunft eine individuelle Zuteilung von Tutoren gestaltet
verstärkt daran gearbeitet die Steuerung oder die werden. Die für das International Virtual Labora-
Regelung von Robotern zu verbessern. tory on Mechatronics entwickelte ArchitekturDie Realisierung von Robotik und Mechatronik... 255
ermöglicht so die weltweite Vernetzung von Automatic Control in Aerospace, Bologna, Italy,
Ressourcen um den internationalen Einsatz von 326-331 (2001).
Lerneinheiten in der Ausbildung effektiv zu 11. White, W.E., Zywno, M.S., Brimley, W.J.G. und
ermöglichen. Northwood, D.O., Integrating new and traditional
pedagogies for effective interactive learning in en-
DANKSAGUNG gineering education. Proc. 12th Canadian Conf.
on Engng. Educ., Victoria, Canada, 223-228
Die Autoren bedanken sich für die finanzielle (2001).
Unterstützung im Rahmen des European Cross 12. Schilling, K., Roth, H. und Rösch, O.J., Mobile
Cultural Programme der EU. Dieser Beitrag stützt mini-robots for engineering education. Global J.
sich auf gemeinsame Forschungsaktivitäten mit dem of Engng. Educ., 6, 1, 79-84 (2002).
Department of System and Automation Engineering 13. Zysko, G., Barza, R., Schilling, K., Ma, L. und
der Universidad Carlos III de Madrid in Spanien, dem Driewer, F., Remote experiments on kinematics
Department of Mechanical Engineering der Anna and control of mobile robots. Proc. 5th IFAC Symp.
University in Chennai, Indien und dem Department of on Intelligent Autonomous Vehicles, Lisbon,
Computer Science and Engineering des Thiagarajar Portugal (2004).
College of Engineering in Madurai, Indien. 14. Zysko, G., Barza, R. und Schilling, K., TeleLab
using non-holonomic car-like mobile robot. Proc.
QUELLENANGABEN IFAC Workshop, Grenoble, France (2004).
15. Zeiger, F. und Schilling, K., Remote laboratories
1. Dormido, S. (Hrsg.), Proc. IFAC Workshop on on mobile robotics. IEEE Computer Society -
Internet Based Control Education. Madrid: Technical Committee on Learning Technology
Pergamon Press (2001). (LTTC), 7, 3 (2005).
2. Goldberg, K. und Siegwart, R., Beyond Webcams 16. Zeiger, F. und Schilling, K., Experiments with
- an Introduction to Online Robots. Boston: mobile robots in tele-education. Proc. 3 rd .
MIT Press (2001). Deutsche e-learning Fachtagung Informatik
3. Schilling, K., Roth, H. und Lieb, R., Remote (DeLFI 2005), Rostock, Deutschland (2005).
control of a Mars Rover via Internet to support 17. Sauer, M., Zeiger, F., Driewer, F. und Schilling,
education in control and teleoperations. Acta K., Remote control on mobile robots in low band-
Astronautica, 50, 173-178 (2002). width environments. Proc. Inter. Conf. on
4. Schilling, K. und Roth, H. (Hrsg.), Proc. Inter. Informatics in Control, Automation and Robot-
Workshop on Tele-Education in Mechatronics ics, Barcelona, Spain, 163-168 (2005).
Based on Virtual Laboratories. Weingarten, 18. Zeiger, F. und Schilling, K., Remote laboratories
Deutschland (2001). for mobile robots. Proc. Research and Educa-
5. Weinberg, J.B. und Yu, X., IEEE Robotics & tion in Mechatronics (REM2005), Annecy,
Automation Magazine. Special Issue auf Robot- France (2005).
ics in Education, 10, 2/3 (2003). 19. Schilling, K. und Meng, Q., The MERLIN vehi-
6. Casals, A. und Grau, A., Proc. 1st Workshop on cles for outdoor applications. Proc. 4th SPIE Conf.
Robotics Education and Training. RET, on Unmanned Ground Vehicle Technology,
Weingarten, Deutschland (2001). Orlando, USA (2002).
7. Schmid, D., Gruhler, G. und Fearns, A. (Hrsg.),
eLearning. Haan-Gruiten: Verlag Europa- BIOGRAPHIEN
Lehrmittel (2003).
8. Marin, R., Sanz, P. und Schilling, K. (Hrsg.), Florian Zeiger war bis 2004
J. of Robotic Systems. Special Issue auf Internet Informatikstudent an der
und Online Robots für Telemanipulation, 22, 3 Bayerischen Julius-
(2005). Maximilians Universität
9. Bicchi, A., Caiti, A., Pallottino, L. und Tonietti, G., Würzburg. Nach dem
Online robotic experiments for tele-education at erfolgreichen Abschluss
the University of Pisa. J. of Robotic Systems, begann er im Mai 2004 seine
22, 4, 217-230 (2005). Promotion am Lehrstuhl für
10. Schilling, K., Adami, T.M. und Irwin, R.D., A Robotik und Telematik. Die
virtual laboratory for space systems engineering derzeitigen Arbeitsgebiete
experiments. Proc. 15 th IFAC Symp. on umfassen die Fernsteuerung256 F. Zeiger, M. Schmidt & K. Schilling
und Vernetzung mobiler Roboter, Telematik und Satelliten und Tele-Ausbildung mit mobilen Robotern.
Telekommunikation für vernetzte mobile Roboter und
Tele-Laboratorien im Bereich der mobilen Roboter. Klaus Schilling ist Ordinarius
am Lehrstuhl für Robotik
Marco Schmidt promoviert und Telematik im Institut für
zurzeit am Lehrstuhl für Informatik der Universität
Robotik und Telematik in Würzburg. Er arbeitete in
Würzburg. Nach dem der Raumfahrtindustrie und
Absolvieren seines war für Machbarkeits-
Informatik-Studiums an der analysen interplanetarer
Universität Würzburg Raumfahrtmissionen
beschäftigt er sich nun seit verantwortlich. Die
Mai 2006 mit den Bereichen Forschungsschwerpunkte
Telekommunikation bei liegen in den Bereichen Sensor- und Regelungssysteme
mobilen Robotern, Pico- für autonome und ferngesteuerte mobile Roboter.Sie können auch lesen

















































