Kalibrierung von GPS-Referenzstationen - Volker Böder, Hannover
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Kalibrierung von GPS-Referenzstationen
Volker Böder, Hannover
0. Einleitung
Die Qualitätssicherung der vom Satellitenpositionierungsdienst der deutschen Landesvermessung (SAPOS)
angebotenen Dienste wird durch die wachsende Zahl an Nutzern in naher Zukunft einen immer größeren
Stellenwert erhalten. Zuverlässigkeit und Genauigkeit sind Merkmale, die den Berufsstand des Vermessers
seit jeher charakterisieren. Zuverlässigkeit, Genauigkeit und Wirtschaftlichkeit muß darum auch der Nutzer
des SAPOS-Dienstes von den Anbietern erwarten können. Für Genauigkeitsbereiche, die dem EPS-Dienst
entsprechen, ist dies weitestgehend gegeben. Für die hochpräzise Positionsbestimmung (HEPS) erreichen
die entfernungs- und stationsabhängigen Fehlereinflüsse jedoch schon Größenordnungen, die für den Nut-
zer nicht mehr ausreichend sind. Neben einer Vernetzung ist darum auch eine Kalibrierung der Referenz-
stationen notwendig. Sie kann zusätzlich den SAPOS-Dienst für neue Anwendergruppen öffnen, für die die
Genauigkeit und Zuverlässigkeit des SAPOS-Dienstes bisher nicht ausreichte.
1. Fehlerhaushalt
Der Fehlerhaushalt der hochpräzisen GPS-Positionsbestimmung läßt sich in entfernungsabhängige und
stationsabhängige Fehleranteile unterteilen. Die entfernungsabhängigen Fehleranteile werden zum einen
durch die atmosphärischen Ausbreitungsverzögerungen in Ionosphäre und Troposphäre, zum anderen durch
die Bahnfehler der GPS-Satelliten hervorgerufen. Ein Ansatz, um diese Einflüsse in Echtzeit zu minimieren,
ist die Vernetzung von Referenzstationen. Zu den Fehlern, deren Einfluß nicht entfernungsabhängig, son-
dern auf jeder Station unterschiedlich wirkt, zählt man insbesondere den Mehrwegeeffekt (Multipath), die
Variationen des Antennenphasenzentrums und das Rauschen der Messungen. Diese Einflüsse sind Ge-
genstand von Untersuchungen, die am Institut für Erdmessung der Universität Hannover in einem vom
Bundesministerium für Bildung, Wissenschaft, Forschung und Technologie (BMBF) mit dem Projekträger
Deutsche Luft- und Raumfahrtzentrum e.V. (DLR) geförderten Vorhaben bearbeitet werden. Sie werden im
vorliegenden Beitrag schwerpunktmäßig behandelt.
1.1 Entfernungsabhängige Fehleranteile
Die entfernungsabhängigen Fehleranteile lassen sich auf kurzen Entfernungen zur Referenzstation bei
moderaten Gegebenheiten zum Beispiel durch Differenzbildung oder durch geeignete Modellierung auch in
Echtzeit genügend genau reduzieren. Mit der derzeit ansteigenden Sonnenaktivität und den damit verbun-
denen erhöhten ionosphärischen Störungen wird der Einsatz dieser Verfahren auf Entfernungen von nur
wenigen Kilometern zwischen Referenz- und Mobilstation beschränkt. Das Maximum wird wahrscheinlich
im Jahre 2001 erreicht sein. Die Auswirkungen erhöhter ionosphärischer Störungen auf GPS-Messungen
weist Wanninger [1993] im mitteleuropäischen Raum nach.
In Wübbena et al. [1996] und Wanninger et al. [1998] werden Vernetzungskonzepte beschrieben, die die
entfernungsabhängigen Fehleranteile weitestgehend reduzieren. Erste Testmessungen am Institut für
Erdmessung in Kooperation mit der Landesvermessung und Geobasisinformationen Niedersachsen (LGN)
zeigen, daß mit der Vernetzung in Echtzeit schnellere, sicherere und genauere GPS-Lösungen generiert
werden können. Jedoch zeigte sich, daß zum Teil Variationen von wenigen Zentimetern mit den für Multipath
üblichen Periodenlängen auftraten.
Es ist zu erwarten, daß die durch die Ionosphäre hervorgerufenen Einflüsse in naher Zukunft Werte von
10 ppm und wesentlich mehr erreichen. Dies betrifft besonders Empfänger, die nur mit der L1-Frequenz ihre
Positionen bestimmen.
591.2 Stationsabhängige Fehleranteile
GPS-Empfänger und -Antenne generieren aus einem anliegenden elektrischen Feld ein Meßsignal. Es
treten Verfälschungen dieses Feldes durch Multipath und Störungen durch Fremdsignale auf, die für jeden
Empfängertyp unterschiedlich wirken. Weiterhin variiert das elektrische Phasenzentrum der GPS-Antenne,
in dem die Phasenlagen der Satellitensignale gemessen werden, in Abhängigkeit der Richtung des einfal-
lenden Signals. In gemischten Netzen, wie es mit dem SAPOS-Konzept grundsätzlich gegeben ist, ist eine
Berücksichtigung dieser Einflüsse für hochpräzise Anwendungen notwendig.
1.2.1 Mehrwegeeffekte (Multipath)
Mehrwegeeffekte (Multipath) entstehen durch diffuse oder kohärente (spiegelnde) Reflexionen des Satelliten-
signals an Flächen in der Umgebung der GPS-Antenne. Solche Flächen können durch Gebäude, parkende
Autos usw. gegeben sein. Als wirksame Einflußgrößen auf die Größe des Multipatheffektes sind zu nennen
[siehe auch Becker 1994]
• Material, Größe und Oberflächenbeschaffenheit des Reflektors
• Einfallswinkel auf dem Reflektor
• Frequenz des Satellitensignals
• Antenneneigenschaften
• Meßtechnik des Empfängers.
Die Wirkungsfläche der spiegelnden Reflexion ist
abhängig vom Einfallswinkel und von den Brech-
ungseigenschaften des reflektierenden Materials.
Nach Boithias [1987] hat sie bei einer vollständigen
spiegelnden Reflexion die Form einer Fresnelzone,
deren kleine Halbachse b sich näherungsweise aus
der Formel
1
b≈ ⋅ λ ⋅d (1)
2
mit λ : Wellenlänge des Signals (z.B.L1=19,05 cm)
d : Entfernung zwischen Reflektor und
spiegelnder Fläche
berechnen läßt. Dieser Ansatz kann näherungsweise
dazu verwendet werden, mögliche Reflektoren in der
Antennenumgebung zu identifizieren. Der kleine
Durchmesser 2b einer solchen Fläche ergibt sich
somit in etwa für das L1-Signal des GPS für eine
Entfernung d=10m mit 2b=1.4m, für d=100m mit
2b=4.4m und für d=1000m mit 2b=13.8m. Kleinere
Abb. 1: Entstehung von Multipath; der Multipatheinfluß auf die GPS- Flächen oder unregelmäßige Oberflächen, deren
Phasenmessung ist eine Funktion der Amplitude des reflektierten Rauhigkeiten in der Größenordnung der Wellenlän-
(AR) und des direkten Signals (AD) und der Phasenverschiebung gen oder größer liegen, können aber immer noch
(Θ) zwischen den Signalen diffuse Reflexionen verursachen, deren Auswirkun-
gen sich in einem erhöten Meßrauschen niederschla-
gen. Es wird angenommen, daß die Reflexionseigenschaften der Flächen durch Regen, Schnee und Eis
verändert werden.
Der Einfluß des Umwegsignals kann an der GPS-Antenne durch geeignete Bauweisen verringert werden.
Vielfach werden in vermessungstechnischen Anwendungen besonders leichte Antennen (siehe Abbildung
2) verwendet, damit die Ausrüstung handlicher ist. Bei solchen Antennen werden keine besonderen Vorkeh-
rungen gegen Multipath getroffen. Auf Referenzstationen oder in festen Installationen bietet sich die Mög-
lichkeit an, den Multipath durch eine größere Grundplatte oder besser noch durch sogenannte Choke-Ring-
Antennen zu vermindern. Eine größere Grundplatte schirmt dabei die am Boden reflektierten Signale bes-
ser ab. Jedoch können diese Signale durch Beugungserscheinungen am Rand der Grundplatte trotzdem
noch einen Multipatheffekt hervorrufen. Bei den Choke-Ring-Antennen (Abb. 2A, 2B) wird die Feldstärke
flach einfallender Umwegsignale durch die ringförmig um die Empfangskomponente angeordneten Metall-
streifen reduziert. Desweiteren unterscheiden sich die GPS-Antennen durch die verwendeten Empfangs-
komponenten, aus denen unterschiedliche Dämpfungen und Polarisationen des Signals resultieren.
60Abb. 2: Unterschiedliche Bauweisen von GPS-Antennen am Beispiel der Ashtech-Produkte; A: Choke-Ring, B: Choke-Ring mit Dome,
C: Geodetic I, D: Geodetic II, E: Geodetic III, F: Marine-B
Als letzter Einflußfaktor auf die Größe des Multipath sollen die unterschiedlichen Meßtechniken der Emp-
fänger genannt werden. Über mehrere Korrelationsprozesse mit den intern im Empfänger erzeugten Kopien
des Satelliten-Codes werden die empfangenen Signale synchronisiert. Üblicherweise entspricht der zeitli-
che Abstand zwischen den Korrelationsfunktionen einer halben Chiplänge (0.5 T). Durch die Wahl eines
kürzeren Abstandes (0.1 ... 0.05 T) bei der narrow correlator spacing -Technik wird der Regelbereich ver-
kleinert und dadurch der Fehlereinfluß des Multipath verringert [Van Dierendonck et al. 1992]. Der Nachteil
dieser Technik ist eine verminderte Signalverfolgungsbandbreite und eine größere Anfälligkeit gegen Stö-
rungen, besonders bei kinematischen Anwendungen.
Die Mehrwegeeffekte wirken sich unterschiedlich stark auf den Fehlerhaushalt der Code- und der Phasen-
messungen aus. Die Größenordnungen werden weitgehend von der Stärke des Multipathsignals und der
jeweiligen Wellenlängen des Signals bestimmt. Bei dem C/A-Code können Fehler von mehreren Metern
auftreten. Für die Trägerphasenmessungen berechnet sich der Mehrwegeeinfluß aus der unten stehenden
Formel (2) [nach Seeber 1993]. Für die Maximalwerte α = 1 und Θ = 90° erhält man für L1 einen maximalen
Einfluß von etwa 5 cm, für L2 etwa 6 cm.
sin Θ AR
∆ϕ = arctan mit α= (2)
1 + cos Θ AD
α
mit AR: Amplitude des reflektierten Signals
AD: Amplitude des direkten Signals
Θ : Phasenverschiebung zwischen den Signalen.
Multipath tritt üblicherweise periodisch auf. Die typischen Perioden des Multipath liegen zwischen 30 Se-
kunden und einer Stunde. Von großer Bedeutung für die Positionsbestimmung ist, daß sich der Multipatheinfluß
nicht durch Differenzbildung der üblichen Einzel-, Doppel- oder Dreifachdifferenzen eliminieren läßt, son-
dern sich vielmehr hierdurch verstärkt.
Weiterführende Literatur findet man in Seeber [1993], Becker [1994], Eissfeller [1997], Jülg [1997], Wanninger
et al. [1997] und Wildt et al. [1998].
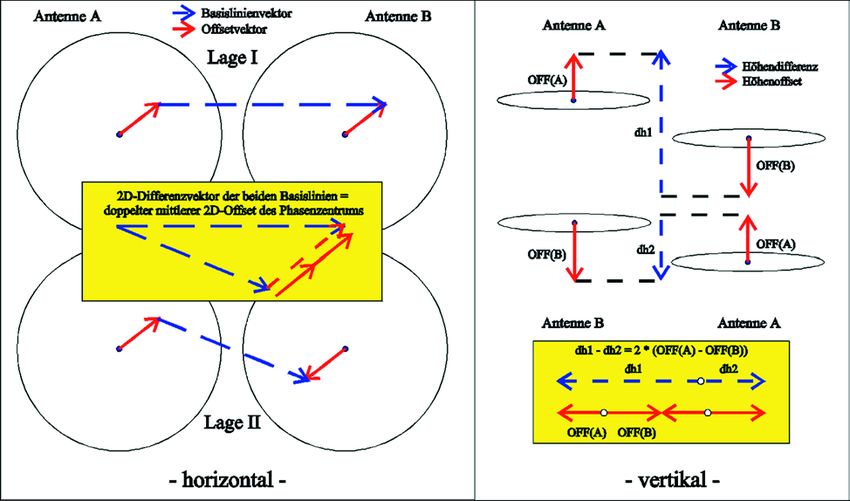
611.2.2 Mittleres Antennenphasenzentrum und dessen Variationen Die Trägerphasenmessung zu einem Satelliten bezieht sich auf ein elektrisches Phasenzentrum an der GPS-Antenne. Normalerweise wird in Auswerteprogrammen ein mittleres Phasenzentrum verwendet, das mit dem mechanischen Zentrum der Antenne übereinstimmt. Antennen verschiedener Bauart unterschei- den sich aber in der Lage ihrer Phasenzentren. Die Lage des elektrischen Phasenzentrums variiert weiter- hin in Abhängigkeit von Azimut und Elevation des eintreffenden Signals und von der Frequenz des Aus- wertesignals. Der GPS-Nutzer kann dieses Problem für herkömmliche Anwendungen umgehen, indem er Antennen glei- chen Typs verwendet und diese gleich nach Norden ausrichtet. Die Flexibilität im SAPOS-Konzept läßt sowohl für die Referenzstationsbetreiber als auch für die SAPOS-Nutzer unterschiedliche Empfänger und Antennen zu. Zur Qualitätssicherung der Referenzstationen und für eine hochpräzise Positionsbestimmung auf Seiten der Nutzer ergibt sich somit die Notwendigkeit der Kalibrierung der GPS-Antennen. Die Bestimmung des mittleren Offsets des elektrischen Phasenzentrums vom mechanischen Phasenzentrum und dessen Variationen kann durch relative und absolute Feldkalibrierverfahren oder aufwendiger absolut in speziellen Labors erfolgen. Der Nachteil relativer Verfahren besteht darin, daß ein Anbringen der Korrektu- ren immer nur bei der Nutzung von Antennen möglich ist, die miteinander kalibriert wurden. Die Laborkalibrierungen finden in reflexionsarmen Räumen statt, in denen die Mehrwegeeffekte durch spezielle Installationen weitgehend unterdrückt werden [Schupler et al. 1995]. Im folgenden sollen nur die weniger aufwendigen Feldkalibrierverfahren betrachtet werden. Bestimmung der mittleren Offsets des Antennenphasenzentrum Die Bestimmung des absoluten mittleren Offsets des Phasenzentrums kann für die horizontalen Kompo- nenten recht einfach mit handelsüblicher Software für präzise Anwendungen durch die ”Messung in zwei Lagen” vorgenommen werden (siehe Abbildung 3). Hierzu wird eine kurze Basislinie für wenige Stunden mit zwei Antennen des gleichen Typs besetzt, wobei die Antennen gleich ausgerichtet sind. Anschließend wird eine Antenne um 180° gedreht und wiederum mit beiden Antennen mehrstündig beobachtet. Die Differenz der beiden gerechneten Vektoren zwischen Referenz- und Prüfantenne ergibt den doppelten horizontalen Offset des Phasenzentrums. Die vertikale Komponente kann derart nicht absolut bestimmt werden. Eine entsprechende Drehung der Antenne würde das Phasenzentrum zum Boden hin ausrichten, dort können aber keine Satelliten beobachtet werden. Abb. 3: Beispiel für die Bestimmung der absoluten horizontalen und relativen vertikalen Komponenten des mittleren Offsets des Antennenphasenzentrums; Messung in 2 Lagen und Antenna-Swap 62
Die Bestimmung des vertikalen Offsets gelingt im einfachsten Fall nur relativ zwischen zwei Antennen. Zum
einen kann der Offset aus einem Vergleich zwischen der GPS-Lösung einer kurzen Basislinie und einem
präzisen Nivellement zwischen den beiden Punkten abgeleitet werden, zum anderen durch den Vergleich
zweier Sessions mit getauschten Antennen bei gleicher Ausrichtung (Antenna-Swap, siehe Abbildung 3).
Alle Verfahren können relativ einfach mit handelsüblicher Software durchgeführt werden. Die Verfahren
haben generell den Nachteil, daß die Beobachtungen durch Mehrwegeeffekte beeinflußt werden. Die mitt-
leren Offsets können besonders in der Höhenkomponente Größenordungen von wenigen Zentimetern errei-
chen.
Bestimmung der Variationen des Phasenzentrums (Phase Center Variations, PCV)
Wie bereits erwähnt, ist die Lage des elektrischen Phasenzentrums der Antenne von der Einfallsrichtung,
der Frequenz und der Stärke des eintreffenden Signals abhängig. Die Wirkung der Phasenzentrumsvariationen
(PCV) erreicht mehrere Millimeter bis zu etwa 2 cm. Bleibt z. B. der elevationsabhängige Phasenfehler der
Antenne unberücksichtigt, führt dies speziell bei der Modellierung der troposphärischen Laufzeitverzögerung
zu systematischen Höhenfehlern, die mehrere Zentimeter erreichen können.
Relative Bestimmungen der PCV’s werden im allgemeinen mit Choke-Ring-Antennen als Referenz durch-
geführt, da der Multipatheinfluß bei ihnen gering ist. Solche PCV-Bestimmungen werden in Breuer et al.
[1995], Rothacher et al. [1996], Mader [1998] und Kaniuth [1998] beschrieben. Ist das individuelle PCV-
Modell der Referenzantenne bekannt, können auch absolute Werte abgeleitet werden.
Um Multipath und PCV’s trennen zu können, schlagen Wübbena et al. [1997] ein gemeinsam vom Institut
für Erdmessung und der Geo++, Gesellschaft für satellitengestützte und navigatorische Technologien GmbH
in Garbsen entwickeltes Feldverfahren vor, bei dem Kalibrierungsmessungen mit einer Referenz- und einer
Prüfantenne an zwei aufeinanderfolgenden Tagen durchgeführt werden. Bei diesem Verfahren wird ausge-
nutzt, daß sich die Konstellation der Satelliten etwa alle 23 h 56 min, entsprechend einem siderischen Tag,
wiederholt. Bei unveränderten Umgebungsbedingungen wiederholt sich somit der geometrieabhängige
Multipatheinfluß für die entsprechenden Satelliten und kann durch die Bildung von Tagesdifferenzen redu-
ziert werden. Die Informationen über die PCV erhält man, indem die Antenne um das Phasenzentrum
gedreht und gekippt bewegt wird. Dazu wurde eine Antennenhalterung entwickelt, die Drehungen und
Kippungen um einen Punkt erlaubt. Das Verfahren kann gleichzeitig genutzt werden, um das mittlere Phasen-
zentrum zu ermitteln. Die Modellierung der PCV wird durch eine Kugelfunktionsentwicklung über Azimut
und Elevation durchgeführt.
Abbildung 4 zeigt eine qualitative Darstellung der PCV des L1-Signals einer Choke-Ring-Antenne. In Abbil-
dung 5 ist das Ergebnis einer Antennenkalibrierung am Beispiel einer Geodetic II Antenne der Firma Ashtech
dargestellt.
Abb.4: Qualitative Darstellung der PCV‘s für eine Ashtech Abb.5: Variationen des Phasenzentrums am Beispiel
Choke Ring Antenne (Völksen, Menge 1998) einer Ashtech Geodetic II-Antenne (Isolinien in mm)
Weitergehende Literatur zu der Bestimmung von Phasenzentrumsvariationen mit dem absoluten Feldkalibrier-
verfahren ist in Wübbena et al. [1997], Seeber et al. [1997], Völksen und Menge [1998] und Menge et al.
[1998] und Köhncke [1998] zu finden.
631.2.3 Weitere Störeinflüsse
Zusätzliche Einflüsse, die durch eine sorgsame Auswahl des Antennenstandpunktes ausgeschlossen wer-
den müssen, sind Störungen durch künstliche elektromagnetische Strahlungen. Kolb [1997] klassifiziert
verschiedene Störquellen nach ihrer Wirkung auf GPS-Signale. Demnach müssen z. B. UKW-Rundfunk-
sender, VHF-TV-Sender, UHF-TV-Sender mit hoher Sendeleistung im Umkreis von 100..500 m gemieden
werden. Besonders störanfällig sind die GPS-Messungen in Digipeater-Richtfunkstrecken des Amateur-
funks, die mit ca. 1240,5 Mhz eine dem GPS L2-Signal ähnliche Frequenz betreiben. Auch spezielle Radar-
anlagen der Deutschen Flugsicherung (L-Band-Air-Traffic-Control-Radar, SREM oder SRELL, normaler-
weise nicht in der direkten Nähe der Flughäfen) können noch Störungen im Abstand von bis zu 20 km
hervorrufen. Grundsätzlich sollte die unmittelbare Nähe der meisten Stahlungsquellen gemieden werden.
Für Referenzstationen sollten solche Störeinflüsse konsequent ausgeschlossen werden. Weiteres zu elek-
tromagnetischen Störungen findet man auch in Butsch [1997].
Die Bauweise des Gebäudes und des Pfeilers oder Stativs, auf dem die Antennen montiert sind, muß eine
Bewegung nahezu ausschließen. Bei der Auswahl des Standpunktes soll natürlich auch auf eine geringe
Abschattung der Satellitensignale und auch auf einen geringen Multipatheinfluß geachtet werden. Jeder
Aufbau oberhalb des Antennenhorizonts kann Multipath und Abschattungen der Signale hervorrufen.
2. Untersuchungen am Institut für Erdmessung zur Kalibrierung von GPS-
Stationen
Am Institut für Erdmessung wurden in Kooperation mit der Geo++ verschiedene Erfahrungen bei der An-
tennenkalibrierung und bei der Anbringung der Korrekturen gemacht, die auch in den oben genannten
Veröffentlichungen zu finden sind. In den bisher unternommenen Untersuchungen mit der Antennenhalterung
zeigten sich Schwächen. Insbesondere war der Kalibrierungsvorgang sehr zeitaufwendig und die Kalibrier-
einrichtung mußte regelmäßig mit einem hohen Arbeitsaufwand selbst überprüft werden.
Im Rahmen des von BMBF und DLR geförderten
Vorhabens ”Entwicklung und Erprobung eines Ver-
fahrens zur hochpräzisen Kalibrierung von GPS-
Antennenaufstellungen” soll das unter 1.2.2 beschrie-
bene Konzept zur Erfassung von absoluten An-
tennenphasenzentrumsvariationen und Multipath-
einflüssen ausgearbeitet, erprobt und zu einem zu-
verlässigen, operationellen Kalibrierungsverfahren für
Antennenaufstellungen entwickelt werden. Ange-
strebt wird ein Genauigkeitsniveau von 1 mm für
kurze Meßzeiten.
Teilziele sind dabei die Bestimmung von absoluten
Phasenzentrumsvariationen der Antennen sowie die
Erfassung von variablen Multipathsituationen durch
Abtasten der Antennenumgebung mittels kontrollier-
ter präziser Antennenbewegungen. Im Vordergrund
der Untersuchungen und Entwicklungen steht die
Nutzung des GPS. Es soll aber in zunehmendem
Maße auch GLONASS berücksichtigt werden, da
inzwischen leistungsfähige Zweifrequenzsysteme auf
dem Markt sind und zunehmend in der Praxis einge-
setzt werden.
Durch den Einsatz eines frei beweglichen Roboter-
armes (siehe Abb. 6) wird die Antennenkalibrierung
Abb. 6: Roboterarm zur automatisierten Antennenkalibrierung weitestgehend automatisiert. Im Zuge der ersten
Untersuchungen im Vorhaben wurde eine Meßanord-
nung mit dem Roboterarm zur absoluten Antennenkalibrierung entworfen und realisiert. Die Programmie-
rung des Roboterarmes wird von der Firma Geo++ vorgenommen.
Die Grundidee des Kalibrierungsverfahrens der GPS PCV ist auch auf GLONASS übertragbar. Jedoch
64wiederholt sich die Satellitenkonfiguration erst nach 8 Tagen, so daß für eine Nutzung des Auswerteverfahrens
noch eingehende Untersuchungen und Sonderentwicklungen erforderlich sind. Über absolute
Antennenkalibrierungen für GLONASS Empfangsanlagen liegen bislang keine Erkenntnisse vor. Desglei-
chen ist wenig über Multipatheffekte bei GLONASS bekannt geworden.
Abb. 7: Reduzierung des Multipatheinflußes durch Differenzbildung; Doppelte Differenzen und Differenzbildung zwischen Doppel-
ten Differenzen zweier aufeinanderfolgenden Tage (216, 217)
Eine am Institut für Erdmessung im Rahmen des Pilotprojektes entwickelte Meßanordnung ermöglicht eine
nicht automatisierte Abtastung räumlicher Multipathvariationen. Eine automatisierte Wetterstation wurde
auf der Basis handelsüblicher Einzelkomponenten zusammengestellt. Das erfolgreiche Detektieren der
Oberflächenfeuchte in der Antennenumgebung wird gegenwärtig in mehreren Meßreihen untersucht. Die
vorläufigen Ergebnisse dieser Meßreihen zeigen für einen gegebenen Aufstellungsort, daß sich die
Multipathsignale täglich wiederholen, sofern sich die Satellitenbahn oder die Umgebung bzw. die Oberflä-
che des Reflektors nicht durch besondere Einflüsse stark verändern. Dies ist sowohl in den Residuen der
GPS-Messungen als auch in den Darstellungen des Signal/Rausch-Verhältnisses der Satellitensignale zu
erkennen.
In Abbildung 7 wird anhand einer Messung an den Tagen 216 und 217 die Reduzierung der Multipatheffekte
unter Beweis gestellt. Die Residuen der doppelten Differenzen zwischen den Satelliten 03 und 17 zeigen ein
periodisches Verhalten mit einer Amplitude von ca. 2 cm. Bildet man die Tagesdifferenz dieser Residuen, so
wird der periodische Anteil eliminiert und es verbleibt ein Rauschen von wenigen Millimetern. Es fällt aber
auf, daß ab der Mitte der Darstellung der Tagesdifferenz die Streuungen größer werden und Werte bis zu
1 cm erreichen. Dies läßt sich mit einsetzendem Regen in Verbindung bringen, der mit einem Regensensor
(Sekunde 201800) detektiert wurde. Diese vorläufigen Ergebnisse weisen auf eine Veränderlichkeit des
Multipatheffektes durch Witterungsbedingungen hin.
65Ein weiterer Indikator für den Multipatheffekt ist das Signal/Rausch-Verhältnis. Hier zeigen Meßreihen im Rahmen des Pilotprojektes, daß sich eine Veränderung des Aufstellungsortes der GPS Antenne um wenige Dezimeter deutlich in einer Veränderung des Signal/Rausch-Verhältnisses widerspiegelt, wenn Multipath vorhanden ist. Die gefundenen Erkenntnisse müssen noch durch weitere Meßreihen bestätigt werden. Sie lassen aber erwarten, daß die räumlichen Variationen des Multipath unter anderem mit Hilfe des Signal/ Rausch-Verhältnisses detektierbar sind. 3. Zusammenfassung und Ausblick Der vorliegende Beitrag sollte einen Einblick in die stationsabhängigen Fehleranteile und deren Kalibrierung im Hinblick auf die Verbesserung der Zuverlässigkeit und Genauigkeit der Referenzstationen geben. Durch die Vielzahl der Anwender, die einen DGPS-Dienst wie SAPOS nutzen, werden auch verschiedene Empfängertypen zum Einsatz kommen. Dies macht die Kalibrierung der Antennen und der Stationsverhältnisse (z.B. Multipath) notwendig, um den Nutzer auch in Echtzeit ein hohes Genauigkeitspotential anbieten zu können. Im Rahmen eines Vorhabens, das am Institut für Erdmessung in Zusammenarbeit mit der Geo++ durchge- führt wird, wird ein automatisiertes Verfahren zur Antennen- und Stationskalibrierung entwickelt. Dazu wird ein modular aufgebauter Roboterarm eingesetzt. Es wird angestrebt, daß dem Nutzer mit Hilfe von kalibrier- ten Referenzstationen eine Genauigkeit im Millimeterbereich angeboten werden kann. Ein Schwerpunkt der Arbeiten wird dabei auf der Modellierung des Multipath liegen. Die automatisierte Kalibrierung der Antennen wird bereits im laufenden Projektjahr umgesetzt werden. Die Untersuchungen beschränken sich nicht nur auf das GPS, sondern auch auf GLONASS. Zu GLONASS sind bisher wenig Erfahrungen zu den Variationen des Antennenphasenzentrums und zum Multipathverhalten bekannt. Es werden weiterhin Erkenntnisse zu hochpräzisen kinematischen Anwendungen erwartet. Das Projekt wird Anfang des Jahres 2001 abgeschlossen werden. Kalibrierte Referenzstationen werden die Zuverlässigkeit, Genauigkeit und Wirtschaftlichkeit der Positions- bestimmung mit GPS und GLONASS für den Nutzer sichern. Die Verfahren sind nicht nur für die Referenz- stationsbetreiber nutzbar, sondern auch auf die Anwender auf der Nutzerseite übertragbar. Zu guter Letzt sei dem Verfasser eine Vision erlaubt: um den Nutzer eines Referenzstationsnetzes Sicher- heit und Zuverlässigkeit garantieren zu können, sollten alle Referenzstationen auf ihre Qualität untersucht und abschließend zertifiziert werden. Dies würde der Transparenz dienen, das Vertrauen in den Referenz- stationsbetreiber und die Akzeptanz des SAPOS-Dienstes seitens der Kunden wesentlich steigern. 4. Dank Teile der Untersuchungen wurden in einem Vorhaben am Institut für Erdmessung vom Bundesministerium für Bildung, Wissenschaft, Forschung und Technologie (BMBF) mit dem Projektträger Deutsche Luft- und Raumfahrtzentrum e.V. (DLR) unter dem Kennzeichen NA98098 und dem Projektträger Biologie, Energie und Ökologie (BEO) unter dem Kennzeichen 03PL022B gefördert. Der Geo++ GmbH (Dr. Wübbena, Dr. Schmitz) in Garbsen möchte ich meinen Dank für die Zusammenar- beit bei den Untersuchungen und bei der Programmierung des Roboterarmes aussprechen. Mein besonderer Dank gilt dem Leiter des Projektes, Herrn Professor Seeber, und meinen Kollegen Herrn Falko Menge und Herrn Christof Völksen am Institut für Erdmessung, die gemeinsam mit der Geo++ die Entwicklung des Feldkalibrierverfahren betrieben haben. Literatur Becker, D. (1994): Mehrwegeeinfluß bei GPS. Zeitschrift für Satellitengestützte Positionierung, Navigation und Kommunikation (SPN), Nr. 4, 1994. Boithas, L. (1987): Radio Wave Propagation. North Oxford Academic Publishers Ltd.; London, 1987. Breuer, B.; J. Campbell; B. Görres; J. Hawig; R. Wohlleben (1995): Kalibrierung von GPS-Antennen für hochgenaue geodätische Anwendungen. Zeitschrift für Satellitengestützte Positionierung, Navigation und Kommunikation (SPN), Nr. 2, 1995. 66
Butsch, F. (1997): Elektromagnetische Störungen bei GPS. Allgemeine Vermessungsnachrichten, Vol. 104,
Nr. 5, 1997.
Eissfeller, B. (1997): Ein dynamisches Fehlermodell für GPS Autokorrelationsempfänger. Schriftenreihe
des Studiengang Vermessungswesen, Universität der Bundeswehr München, Heft 55, Neubiberg, 1997.
Jülg, T. (1997): Einfluß der Mehrwegesignalausbreitung auf die Laufzeit- und Phasenmessungen beim Glo-
balen Navigationssystem GPS. Dissertation, Technische Hochschule Darmstadt, Fachbereich Elektrotech-
nik und Informationstechnik. DLR Forschungsbericht 97-28. Oberpfaffenhofen, 1997.
Kaniuth, K,; D. Kleuren; H. Tremel; W. Schlüter (1998): Elevationsabhängige Phasenzentrumsvariationen
geodätischer Antennen. Zeitschrift für Vermessungswesen (ZfV), Nr. 10, 1998.
Köhncke, H. (1998): Untersuchungen zum Multipath bei GPS Beobachtungen. Diplomarbeit am Institut für
Erdmessung, Universität Hannover, unveröffentlicht.
Kolb, W. (1997): Interferenzprobleme bei GPS-Signalen - Grundlagen, Erfahrungen und Tips bei Störungen
des GPS-Empfanges. Unterlagen vom 46. DVW-Seminar ”GPS-Praxis und Trends”, Frankfurt am Main,
29.09.-01.10.1997.
Menge, F.; G. Seeber; C. Völksen; G. Wübbena; M. Schmitz (1998): Results of Absolute Field Calibration of
GPS Antenna PCV. ION GPS-98, Nashville, Tennessee, USA, 15.-18.09.1998.
Schupler, B.R.; T.A. Clark; R.L. Allshouse (1995): Characterization of GPS User Antennas; Reanalysis and
New Results. In: Beutler et al. (Eds.). GPS Trends in Precise Terrestrial, Airborne, and Spaceborn Applications.
IAG Symposium, No. 113, Boulder, Colorado, USA, 03.-04.07.1995.
Seeber, G. (1993): Satellite Geodesy - Foundations, Methods, and Applications. Walter de Gruyter, Berlin,
New York, 1993.
Seeber, G.; F. Menge; C. Völksen; G. Wübbena; M. Schmitz (1997): Precise GPS Positioning Improvements
by Reducing Antenna and Site Effects. Scientific Assembly of the International Association of Geodesy
IAG97, Rio de Janeiro, Brasil, 03.-08.09.1997.
Van Dierendonck, A.J.; P. Fenton; T. Ford (1992): Theory and Performance of Narrow Correlator Spacing in
a GPS Receiver. Proceedings ION GPS-92, San Diego, 1992.
Völksen, C., F. Menge (1998): Nutzung unterschiedlicher GPS-Antennen und ihr Einfluß auf die relative
Positionsbestimmung. Erschienen in: HPPS-Seminar, Landesvermessung und Geobasisinformationen Nie-
dersachsen, Hannover, 05.02.1998.
Wanninger, L. (1993): Der Einfluß ionosphärischer Störungen auf präzise GPS-Messungen in Mitteleuropa.
Zeitschrift für Vermessungswesen, ZfV, 118, Heft 1, 1993.
Wanninger, L.; S. Wildt (1997): Identifikation von Mehrwegeeinflüssen in GPS-Referenzstations-
beobachtungen. Allgemeine Vermessungsnachrichten (AVN), Vol. 104, Nr. 1, 1997.
Wanninger, L.; J. Bohme (1998): Verwendung virtueller Referenzstationen in regionalen GPS-Netzen. All-
gemeine Vermessungsnachrichten (AVN), Vol. 105, Nr. 4, 1998.
Wildt, S.; L. Wanniger (1998): Validierung von GPS/GLONASS-Referenzstationen. DGON-Seminar
SATNAV98, Dresden, 1998.
Wübbena, G., A. Bagge, G. Seeber, V. Böder, P. Hankemeier (1996): Reducing Distance Dependent Errors
for Real-Time Precise DGPS Applications by Establishing Reference Station Networks. in: Proceedings
ION GPS-96, Kansas City, September 1996
Wübbena, G.; M. Schmitz; F. Menge; G. Seeber; C. Völksen (1997): A New Approach for Field Calibration
of Absolute GPS Antenna Phase Center Variations. Navigation: Journal of the Institute of Navigation, Vol.
44, No. 2, 1997.
67Sie können auch lesen