Mensch-Roboter-Arbeitssysteme effektiv gestalten - Potenziale der Mensch-Roboter-Zusammenarbeit zur Flexibilisierung von Arbeitssystemen - DR.KORS
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

TOP-THEMA
Foto: ROBOTICS Labor (c) Manuela Schwarzl, JOANNEUM RESEARCH
Titanilla Komenda, Mathias Brandstötter
Mensch-Roboter-Arbeitssysteme effektiv gestalten
Potenziale der Mensch-Roboter-Zusammenarbeit zur Flexibilisierung von
Arbeitssystemen
Mensch-Maschine-Arbeitssysteme sind komplexe Systeme – vor allem, wenn sie die Möglichkeit der direkten Zusam-
menarbeit im Sinne des Kollaborationsbegriffs ermöglichen. Auf den ersten Blick scheint die Mensch-Roboter-Kolla-
boration nicht den operativen Unternehmenszielen genüge zu tragen. In diesem Beitrag werden wesentliche Stellschrau-
ben in diesem komplexen System präsentiert und damit gezeigt, wie Potenziale der Mensch-Roboter-Kollaboration
dennoch für industrielle Unternehmen im Bereich der Produktion nutzbar sind.
1. Einleitung eingeführt und es folgte eine kritische reagieren [DIE15]. Demnach fokus-
Reflexion zum industriellen Einsatz sierten Forschungstätigkeiten eher
Die Mensch-Roboter-Zusammenar- von Kollaboration. operative Kennzahlen, wie Produk-
beit wurde erstmals 2006 mit dem tivität, Wirtschaftlichkeit, Flexibili-
Kollaborationsbegriff in der ISO Obwohl die Mensch-Roboter- tät und Modularität, und argumen-
10218-1 definiert. Hier beschrieb die Zusammenarbeit zur Schließung der tierten gleichzeitig, dass das Wissen
Kollaboration einen Betriebszustand, Lücke zwischen rein manueller Fer- über technische sowie sicherheitstech-
in dem ein dafür konstruierter Robo- tigung und robotergestützter Ferti- nische Möglichkeiten zur Umsetzung
ter innerhalb eines festgelegten Ar- gung identifiziert wurde [MAT13], sowie Wechselwirkungen systembe-
beitsraums direkt mit den Menschen erfuhr sie nach der ersten Euphorie stimmender Faktoren innerhalb von
an einem Objekt zusammenarbeitet. eine Welle der Frustration, da die Mensch-Roboter-Arbeitssystemen ei-
Sinn der Mensch-Roboter-Zusam- Klassifizierung bzw. Einordnung nen entscheidenden Beitrag zur wirt-
menarbeit war es, die Fähigkeiten eines potenziellen Arbeitssystems schaftlichen Implementierung solcher
von Mensch und Roboter in einem in ein zeitlich/örtliches Klassifizie- hybrider Arbeitssysteme leisten.
Arbeitssystem zu bündeln. Anstatt rungsschema keinen entscheidenden
sich auf dieses Ziel zu fokussieren, wirtschaftlichen Umsetzungsfaktor Die Gestaltungsrichtlinien von
folgte eine Klassifizierungsdiskussion darstellt. Viel entscheidender war die Mensch-Roboter-Arbeitssystemen
über die zeitliche und örtliche Syn- Tatsache, dass die Mensch-Roboter- lassen sich also in Analogie zum klas-
chronisation von Mensch und Robo- Zusammenarbeit die Möglichkeit sischen Technologie-Hype-Zyklus
ter, um andere Betriebszustände von bietet, den Automatisierungsgrad an folgenden Zielen festmachen (vgl.
der Kollaboration zu unterscheiden innerhalb eines Produktionssystems Abb. 1):
[HAA16], [AAL18]. Begriffe, wie Ko- zu variieren und damit flexibel auf 1. als Marketinginstrument zur
operation oder Koexistenz wurden wechselnde Marktanforderungen zu Schließung einer Fertigungslücke in
WINGbusiness 2/2020 25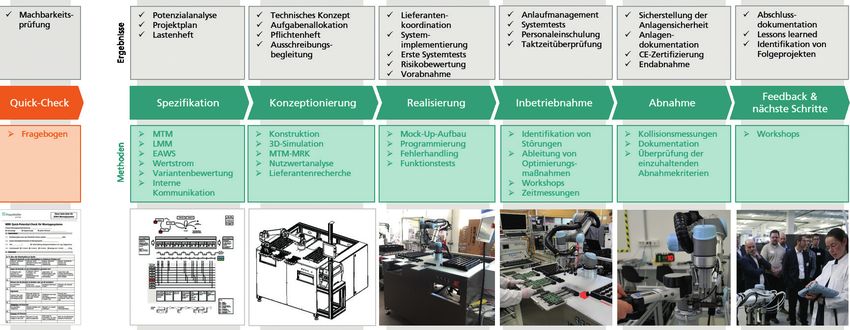
TOP-THEMA
3. Gestaltung von Mensch-Roboter-
Arbeitssystemen
Trotz Zuwachs an Cobot-Herstellern
am Markt, ist für den kollaborativen
Betrieb und damit die Hebung von
operativen Optimierungspotenzi-
alen, nicht die Klassifizierung von
kollaborativ oder kollaborationsfähig
entscheidend, sondern vielmehr der
Einsatz eines Roboters ohne tren-
nende Schutzeinrichtung. Ein hybri-
des Arbeitssystem bringt aufgrund
der variablen Aufgabenzuordnung
zwischen Mensch und Roboter die
notwendige Flexibilität mit sich, um
auf veränderte Produktionsbedin-
gungen zu reagieren [LÜD14]. Die
Unterscheidung zwischen kollabo-
Abbildung 1: Technologie-Hype-Zyklus von Mensch-Roboter-Arbeitssyste- rativ und kollaborationsfähig ist je-
men doch für die sicherheitstechnische
Implementierung der Personenüber-
Hochlohnländern im Rahmen der sen samt Werkzeug und Arbeitsauf- wachung im Kollaborationsraum von
Technologieeinführung [LIN15], gabe sicherheitstechnisch evaluiert wesentlicher Bedeutung. Hierzu gibt
2. als Substitutionsinstrument werden. Kollaborative Roboter un- es verschiedene sicherheitstechnische
des Menschen in der Produktion terscheiden sich von kollaborations- Systeme, die entweder direkt am Ro-
durch günstige Anschaffungspreise fähigen Robotern durch ihr inhärent boter, wie z. B. Sensorhäute, oder im
[ANT16], sicheres Design (keine Quetschstellen Arbeitssystem, wie z. B. optische Sen-
3. als Werkzeug zur Bündelung der oder scharfe Kanten), das geringe Ge- soren, angebracht werden. Die Aus-
Fähigkeiten von Mensch und Robo- wicht, die integrierte Sensorik und wahl der Arbeitssystemabsicherung
ter in einem Arbeitssystem [RAN17], Regelungstechnik zur Leistungs- und hat dann schließlich auch Einfluss auf
und Kraftüberwachung (im Fall einer Kol- die Größe des Arbeitssystems und das
4. als Assistenzsystem zur Unter- lision) und die im Vergleich zu klas- Interaktionsregime im Rahmen der
stützung und Höherqualifizierung sischen Industrierobotern (noch) in- Mensch-Roboter-Zusammenarbeit.
des Menschen in der Produktion tuitiveren Programmierumgebungen Mit der ganzheitlichen Gestal-
[MAY19]. bzw. Mensch-Maschine-Schnittstel- tung von Mensch-Roboter-Arbeits-
len. systemen und der Berücksichtigung
2. Begriffsdefinition und Einordnung von sich beeinflussenden Faktoren
Die Technologie hat den Markt wurde erkannt, dass sich operative
Im Rahmen der Mensch-Roboter- bereichert, doch das Frustrationstal Ziele dennoch mit Mensch-Roboter-
Zusammenarbeit wird zunächst die wurde spätestens mit der Verfolgung Arbeitssystemen erreichen lassen.
Art des eingesetzten Roboters unter- des Substitutionsziels erreicht. Die Dazu ist es essenziell, Optimierungs-
schieden. Neben (inhärent sicheren) Anschaffungspreise von kollabora- potenziale in einzelnen Phasen des
kollaborativen Robotern – sogenann- tiven Robotern waren zwar anfäng- Entstehungsprozesses von Mensch-
ten Cobots – lassen sich Mensch- lich niedriger als die von herkömm- Roboter-Arbeitssystemen zu erken-
Roboter-Arbeitssysteme auch mit lichen Industrierobotern, doch die nen (vgl. Abb. 2). Anhand eines
herkömmlichen Industrierobotern sicherheitstechnische Absicherung Quick-Checks erfolgt zunächst die
umsetzen, die mit entsprechenden sowie die normative Reglementierung richtige Arbeitsplatzauswahl auf Ba-
(Sicherheits-)Vorkehrungen kollabo- der Bewegungsgeschwindigkeiten des sis wirtschaftlicher Kennzahlen, wie
rationsfähig gemacht werden. Der Roboters führten zu Unsicherheiten Produktionsvolumina, Restlaufzeiten
Umfang der notwendigen Sicherheits- bzgl. der Erreichung von operativen und Schichtmodelle [ERM19]. Im
vorkehrungen umfasst die Roboter- Zielen. Der anfängliche Hype lässt Rahmen der Spezifikation erfolgt an-
sensorik und -steuerung und erfordert sich auch an den Verkaufszahlen schließend eine Potenzialanalyse, um
das Vorhandensein von sicherheitsbe- messen. Laut Industrial Federation wirtschaftliche sowie ergonomische
werteter Funktionalität des Roboters, of Robotics (IFR) betrug 2018 der Potenziale innerhalb ausgewählter
wie eine sichere Überwachung der Po- Marktanteil von jenen kollaborativen Arbeitsstationen zu quantifizieren
sition, Geschwindigkeit als auch des Robotern nur 3,24 % von mehr als [RAL20].
Halts. 422.000 installierten Industriero- In diesem Schritt wird vor allem
Dabei sind die eingesetzten Robo- botern weltweit – das sind global auch die Automatisierbarkeit einzel-
ter entweder stationär oder mobil im betrachtet nur rund 14.000 Cobot- ner Prozesse innerhalb der Arbeits-
Arbeitssystem eingebettet und müs- Einheiten. station bewertet. Im Rahmen der
26 WINGbusiness 2/2020
TOP-THEMA Abbildung 2: Phasen der Entstehung eines Mensch-Roboter-Arbeitssystems Konzeptionierung erfolgt die Auf- Faktoren, welche die operativen Ziele Während der Entwurfsphase kann gabenteilung zwischen Mensch und bestimmen [ZHA20]. mithilfe geeigneter Softwarepakete Roboter anhand der Fähigkeiten ein- die Gestaltung des Arbeitssystems zelner Ressourcen und der Anforde- 4. Berücksichtigung der wechselsei- unterstützt und optimiert werden. rungen einzelner Prozesse [RAN19]. tigen Beeinflussung von systembe- Dafür stehen diverse Modellie- Hierbei wird vor allem auch ein men- stimmenden Faktoren rungs- und Simulationswerkzeuge schzentrierter Ansatz verfolgt, bei zur Verfügung, wie bspw. Tecnoma- dem es nicht darum geht, alle Aufga- Durch die Auflösung der räumlichen tix Process Simulate oder ema Work ben dem Menschen zuzuordnen, die Trennung von Mensch und Roboter Designer. Obgleich diese nur in einem nicht automatisierbar sind, sondern ergeben sich vor allem auch Wech- beschränkten Umfang die Aspekte ihm jene Aufgaben zuzuteilen, die er selwirkungen zwischen systembe- eines Mensch-Roboter-Arbeitssy- machen kann und möchte. Im Zuge stimmenden Faktoren, wobei diese stems abbilden können, liefern sie ei- der Realisierung geht es dann um ein entweder der Entwurfs- oder der Be- nen wertvollen Einblick in das System sicheres Anlagendesign. Mechanische triebsphase zugeordnet werden kön- und dienen zur Erkennung von Wech- Gestaltungsprinzipien sowie die An- nen. Die systembestimmenden Fak- selwirkungen und Optimierungsan- ordnung von peripheren Einrich- toren sind: sätzen. Die umfassendste Ausprä- tungen innerhalb des Arbeitssystems gung stellt in der Entwurfsphase der haben bereits einen wesentlichen i. Sicherheitsmodus: Sicher- Digitale Zwilling dar, welcher als Einfluss auf die sicherheitstechnische heitstechnische Vorkehrungen ab- Multiparadigmen-Software sämt- Implementierung [PER20]. Für die hängig von der Art der Kollaboration liche Modellierungs-, Simulations-, erfolgreiche Implementierung eines zwischen Mensch und Roboter Planungs- und Optimierungswerk- Mensch-Roboter-Arbeitssystems ist ii. Diversität des Bedienperso- zeuge zu vereinen versucht. Diesem aber auch die laufende Einbeziehung nals: Individuelle Ausprägung des steht der Digitale Schatten gegenüber, des prospektiven Bedienpersonals Menschen hinsichtlich Arbeitsaus- mit dessen Hilfe ein kontinuierliches in den Entstehungsprozess entschei- führung, Lernkurve etc. und stets aktuelles Modell des Ar- dend. iii. A rbeitssystemgesta lt ung: beitssystems in der Betriebsphase be- Das Bedienpersonal soll mit der Ausführung und Anordnung des Ro- reitgestellt werden kann. Dieser kann Einführung des Roboters nicht über- boters, der peripheren Einrichtungen zudem menschliche Diversitätsfak- rascht oder überrumpelt werden und und des Arbeits-, Bewegungs- sowie toren abbilden, sofern entsprechende schon gar nicht den Eindruck ver- Kollaborationsraums Menschmodelle und laufende Mess- mittelt bekommen, dass der Roboter iv. Systemdynamik: Bewe- daten dafür vorliegen. Auf systemdy- die manuelle Arbeitskraft ersetzt. gungs-, Kollisions- und Störverhalten namischer Ebene können somit Ent- Vielmehr geht es darum, gemeinsam der einzelnen Ressourcen im Arbeits- scheidungen auf einer weitestgehend mit (im besten Fall direkt von) der system umfassenden und aktuellen Wissens- manuellen Arbeitskraft Arbeitspro- v. Zuverlässigkeit: Berücksich- basis beruhen [WAC20]. zesse zu identifizieren, die mithilfe tigung von Fehlverhalten bei der Ar- Eine stabile Betriebsphase zeichnet des Roboters besser oder leichter um- beitsausführung sich außerdem durch ein robustes und gesetzt werden können [DAC19]. Ziel vi. Aufgabenzuordnung: Aufga- zuverlässiges Systemverhalten aus. ist es, den Roboter als physisches As- benteilung zwischen einzelnen Res- Ein Vorteil des Mensch-Roboter-Ar- sistenzsystem zu betrachten. Im Rah- sourcen im Arbeitssystem, beispiels- beitssystems wird bei unvorhergese- men der Optimierung erfolgt dann weise anhand von Fähigkeiten und henen Fehlerfällen offensichtlich, weil schlussendlich die Berücksichtigung Anforderungen oder individuellen der Mensch in derartigen Situationen der wechselseitigen Beeinflussung von Präferenzen unmittelbar korrigierend eingreifen WINGbusiness 2/2020 27

TOP-THEMA
Systembestimmende Beeinflussende Unterstützende umkonfiguriert, sämtliche Steuerpro-
Faktoren Systemeigenschaften Planungsmethoden gramme von Hand adaptiert und Eva-
• Arbeits- und Bewegungsraum des • Offline-
Roboters Programmierung luierungen des adaptierten Systems
Sicherheitsmodus • Bewegungsgeschwindigkeit des • 3D-Simulation – aufgrund der komplexen Zusam-
Roboters • Diskrete
• Prozesszeiten Ereignissimulation menhänge der systembestimmenden
• Fähigkeiten und damit
• 3D-Simulation mit Faktoren – durch Sicherheitsexperten
Arbeitsaufteilung
Diversität des • Prozessgeschwindigkeiten und
digitalen durchgeführt. Dies widerspricht der
Menschmodellen
Bedienpersonals damit Prozesszeiten
• Diskrete Vorstellung eines jederzeit dynamisch
• Körpergröße und damit Position
einzelner Körperteile
Ereignissimulation anpassbaren Arbeitssystems. Diverse
• Positionierung einzelner peripherer Forschungsgruppen arbeiten an un-
Subsysteme
• Positionierung des Roboters
• Offline- terschiedlichen Teilbereichen dieser
Programmierung
Arbeitssystemgestaltung • Bewegungsraum des Roboters
• 3D-Simulation vielschichtigen Problemstellung, wel-
• Bewegungspfade
• Kollisions- bzw. Quetschstellen
• Digitaler Zwilling che sich dem übergeordneten Ziel –
• Prozesszeiten der Schaffung eines wirtschaftlichen,
• Bewegungsverhalten (im Sinne
einer Annäherung oder eines sich selbstständig und sicher modifi-
• Offline-
Ausweichens) des Roboters sobald
Programmierung zierbaren Mensch-Roboter-Arbeits-
ein Mensch im Kollaborationsraum
Systemdynamik
agiert
• 3D-Simulation systems – zuordnen lassen (siehe Tab.
• Physik-Engine
• Abschätzbarkeit der
• Digitaler Schatten 2).
Roboterbewegungen
• Kollisionsverhalten
• Psychophysiologie des Menschen • Erweiterte digitale 6. Diskussion und Zusammenfas-
• Systemverhalten bei Fehlfunktionen Menschmodelle
Zuverlässigkeit
des Steuer- und Regelkreises des • Diskrete sung
Robotersystems Ereignissimulation
• Bewegungspfade und damit
mögliche Kollisionsstellen
• 3D-Simulation Ein wirtschaftlicher Einsatz der
Aufgabenzuordnung • Digitaler Zwilling
• Automatisierungsgrad und damit
• Digitaler Schatten Mensch-Roboter-Kollaboration war
Taktzeit
aufgrund normativer Reglementie-
Tabelle 1: Abhängigkeiten in Mensch-Roboter-Arbeitssystemen rungen und der daraus folgenden
Einschränkung der Flexibilität hin-
kann und je nach Schwere der Fehler- eines sicheren Arbeitssystems. Es er- sichtlich der Modifikation jener
auswirkung eine laufende Produktion weisen sich allerdings drei Faktoren Arbeitssysteme kaum darstellbar.
sicherstellt. Demnach kann ein nicht als maßgeblich: das Design des Ro- Forschungstätigkeiten haben nun
hinreichend zuverlässiges Arbeitssy- boterarms und der mit ihm physisch allerdings systembestimmende Fak-
stem mit wiederkehrenden partiellen wechselwirkenden Systemelemente, toren identifiziert, die es trotz der nor-
Systemausfällen durch eine dyna- seine kinetische Energie bei der Be- mativen Reglementierungen möglich
mische Aufgabenzuordnung stabili- wegungsausführung und die Häufig- machen, Mensch-Roboter-Arbeitssy-
siert werden. Bei einer geänderten Zu- keit des Auftretens einer potenziellen steme so einzusetzen, dass operative
teilung der Aufgaben sind allerdings Mensch-Roboter-Kontaktsituation Ziele erreicht werden können.
die neu entstehenden Verfahrwege im Kollaborationsraum [VIC20].
des Roboters unter der zeitlichen und Eine Zusammenfassung der Die Gestaltung eines solchen Ar-
örtlichen Synchronisation des Men- systembestimmenden Faktoren, de- beitssystems wird dadurch nicht
schen hinsichtlich neu auftretender ren beeinflussende Systemeigenschaf- mehr nur auf die Geschwindigkeit des
Kontaktstellen zu berücksichtigen. ten sowie unterstützende Planungs- Roboters beschränkt, um Kraft- und
Bei einer Aufgabenzuordnung im methoden sind in Tab. 1 aufgelistet. Druckgrenzwerte bei einer möglichen
Rahmen eines Systemausfalls, kann Kollision einzuhalten. Vielmehr geht
die optimal erreichbare Taktzeit u. 5. Mittelfristig einsetzbare Techno- es darum, eine Reihe an Stellgrößen
U. nicht eingehalten werden. Dies ist logien zur ganzheitlichen Gestaltung zu kennen, um ein Arbeitssystem, in
aber im Vergleich zu einem Produkti- von Mensch-Roboter-Arbeitssyste- dem Mensch und Maschine gemein-
onsstillstand durchaus akzeptierbar. men sam arbeiten, effektiv zu gestalten.
Eine Voraussetzung für den Be- Die Identifikation dieser systembe-
trieb eines Mensch-Roboter-Arbeits- Mensch-Roboter-A rbeitssysteme stimmenden Faktoren stellt nun einen
systems ist die Sicherstellung der können im Idealfall auf neue Gege- größeren Lösungsraum und damit die
physischen Sicherheit des Menschen. benheiten, wie bspw. einer Änderung Konfiguration einer Vielzahl an Sys-
Notwendige Sicherheitsvorkehrungen des Produktionsprogramms oder temvarianten dar, um operative Ziele
sind von dem gewählten Sicherheits- der Ressourcenverfügbarkeit, ange- zu erreichen. Die Anzahl dieser Fak-
modus abhängig. Die zugehörigen glichen werden. Dieses Flexibilitäts- toren macht die optimale Lösungsfin-
technischen Normen und Spezifika- potenzial lässt sich aktuell jedoch dung aber auch komplex. Aus diesem
tionen legen hierfür die Rahmenbe- nur mit entsprechendem Personalauf- Grund wurden Methoden und Werk-
dingungen fest und geben auch si- wand durch Änderung des Arbeitssy- zeuge in diesem Artikel zusammen-
cherheitsrelevante Grenzwerte beim stems, organisatorische Maßnahmen gefasst und gegenübergestellt, die die
Kontakt zwischen Mensch und Robo- und manuelle Systemanpassungen Auswirkungen dieser systembestim-
ter vor. Sie bieten jedoch keine Hin- vollständig ausschöpfen. Periphere menden Faktoren ermitteln und vali-
weise zur technischen Ausgestaltung Einrichtungen werden dazu manuell dieren können.
28 WINGbusiness 2/2020TOP-THEMA
Systemparameter
System- Technologie/ Realisierungs- Forschungs ate Assembly Systems’ HRI Potential’,
eigenschaft Werkzeug methode -projekte
Wie wird es Welche Wer forscht
in Tagungsband des 4. Kongress Mon-
Was betrifft es? Was wird erreicht?
realisiert? Herangehensweise? daran? tage Handhabung Industrieroboter, S.
Abstands- und Kombination von Aktive
Sicherheitsmodus Geschwindigkeits- mehreren Sensoren Kollisionsvermeidung
SYMBIOTIC, 128-137.
COROMA
überwachung im Arbeitsraum durch Sensorfusion [HHA16] Haag, M. 2014, ‘Kollabora-
Kombinatorische
Sicherheitsmodus
Sichere Änderung
Software Analyse möglicher DR.KORS
tives Arbeiten mit Robotern – Vision und
des Arbeitssystems
Systemvarianten realistische Perspektive’, in Zukunft der
Ermittlung Smarte
Auswertung von Arbeit in Industrie 4.0, A. Botthof und E.
Diversität des individueller Arbeitskleidung mit AnDy,
bewegten
Bedienpersonals Personen- textilintegriertem SHERLOCK A. Hartmann (Hrsg.), Springer-Verlag,
Sensorquellen
eigenschaften Sensorsystem
Berlin, S. 59-64.
Schutz und Sensorbasierte Onlinefähige
Diversität des [LIN15] Lindekamp, C. 2015, ‘Roboter
Unterstützung des Bewegungsmessung Ergonomie- CoLLaboratE
Bedienpersonals
Bedienpersonals überwachung 4.0 in Hannover’, Handelsblatt 16. April.
Manipulation Weiche und
Arbeitsplatz-
schwerer Lasten im
Cobot für Traglasten
dämpfende SHERLOCK Verfügbar unter: . (13.
Robotersystem nehmung mittels
Augmented Reality Mai 2020).
Arbeitsplatz- Automatisierte
SHERLOCK, [LÜD14] Lüdtke, A. 2014, ‘Wege aus der
Personenabsicherung Software HORSE,
gestaltung Risikobewertung
DR.KORS Ironie in Richtung ernsthafter Automati-
Sensitive Fähigkeiten
Regelungstech-
Regelungsverfahren sierung’, in Zukunft der Arbeit in Indus-
Systemdynamik des Roboters bei auf Basis variabler CogiMon
Montagevorgängen
nischer Algorithmus
Impedanz trie 4.0, A. Botthof und E.A. Hartmann
Abbildung der Ganzheitliche (Hrsg.), Springer-Verlag, Berlin, S. 125-
wechselseitigen Modellierung von StaProZell,
Systemdynamik
Beeinflussung von
Digitaler Zwilling
Mensch-Roboter- KOMPI
146.
Ressourcen Arbeitssystemen [MAT13] Matthias, B. und Ding, H.
Automatisierte An-
passung an neue
Datenaustausch
Selbstlernfähigkeit CoLLaboratE,
2013, ‘Die Zukunft der Mensch-Roboter
Systemdynamik zwischen System-
System-
komponenten
des Systems COROMA Kollaboration in der industriellen Mon-
anforderungen
Intuitive Semantische
tage’, in Tagungsband Internationales
Systemdynamik
Roboterprogrammie- Programmierung Wahrnehmung der AnDy, Forum Mechatronik (ifm), Winterthur,
rung durch Nicht- durch Demonstration menschlichen FlexRoP
Experten Fähigkeiten
Schweiz.
Anpassung des [MAY19] Mayrhofer, W., Ansari, F.,
maschinellen
Systemdynamik
Bewegungsverhalten
Modell Studie CogiMon Sihn, W. und Schlund, S. 2019, ‘Konzept
san den Menschen für ein Assistenzsystem für arbeitsplatz-
Erweitertes digitales Vorhersagemodelle
Prognose des nahes, reziprokes Lernen in hochautoma-
Zuverlässigkeit Menschmodell inkl. für menschliches COROMA
menschl. Verhaltens
Verhaltensprognose Verhalten tisierten Produktionsumgebungen’, Früh-
Deklarative jahrskonferenz, GfA (Hrsg.).
Validierung von
Systembeschreibung
Zuverlässigkeit Programm- Systemarchitektur SAMY [PER20] Pérez, L., Rodriguez-Jiménez,
und formale
modifikationen
Verifikation S., Rodriguez, N., Usamentiaga, R., Gar-
Sensorbasierte
Aufgaben-
Onlinefähige
Prädiktive Daten- Schätzung der cia, D.F. und Wang, L. 2020, ‘Symbiotic
Adaption von CoLLaboratE
zuordnung
Aufgabenplänen
bzw. Menschmodelle menschlichen Human-Robot Collaborative Approach
Bewegung
for Increased Productivity and Enhanced
Tabelle 2: Adressierte Forschungsaspekte zur Berücksichtigung von system- Safety in the Aerospace Manufacturing
bestimmenden Faktoren in Mensch-Roboter-Arbeitssystemen Industry’, The International Journal of
Advanced Manufacturing Technology,
Literatur qualitative Analyse zur Auswahl Springer.
von MRK-Arbeitsplätzen unter Be- [RAL20] Rally, P. und Scholtz, O. 2020,
[AAL18] Aaltonen, I., Salmi, T. und rücksichtigung der Mitarbeitersicht’. ‘Abschätzung der Wirtschaftlichkeit für
Marstio, I. 2018, 'Refining Levels of Col- Dissertation. Fakultät der Human- MRK-Anwendungen', ZWF, Ausgabe
laboration to Support the design and wissenschaften der Otto-von-Gue- 115, Band 3, S. 166-170.
Evaluation of Human-Robot Interac- ricke-Universität Magdeburg. [RAN17] Ranz, F., Hummel, V. und
tion in the Manufacturing Industry', [DIE15] Dietz, T. und Oberer- Sihn, W. 2017, 'Capability-based Task
Procedia CIRP, Ausgabe 72, S. 93-98. Treitz, S. 2015, ‘Mensch-Roboter- Allocation in Human-Robot Collabora-
[ANT16] Antonelli, D., Astanin, S. Kooperation wirtschaftlich ein- tion', Procedia Manufacturing, Ausgabe
und Bruno, G. 2016, ‘Applicability of setzen’, MM Maschinenmarkt 16. 9, S. 182-189.
Human-Robot-Collaboration to Small Juli. Verfügbar unter: . (13. Mai 2020). acturing’, in Proceedings of the Internati-
[DAC19] Dachwitz, J. 2019, ‘Zu- [ERM19] Ermer, A.-K., Seckelmann, onal Conference on Competitive Manuf-
kunftsorientierte Arbeitsplatz- T., Barthelmey, A., Lemmerz, K., Glo- acturing (COMA), D. Dimitrov (Hrsg.),
gestaltung unter Anwendung der gowski, P., Kuhlenkötter, B. und Deu- Stellenbosch University, Stellenbosch, 30.
Mensch-Roboter-Kooperation – Eine se, J. 2019, ‘A Quick-Check to Evalu- Januar-01. Februar, S. 278-284.
WINGbusiness 2/2020 29TOP-THEMA
[VIC20] Vicentini, F. 2020, ‘Termino- von roboterge-
logy in safety of collaborative robotics’, stützten Automa-
Robotics and Computer-Integrated Ma- tisierungsanlagen
nufacturing, Ausgabe 63. und beschäftigt Titanilla Komenda,
[WAC20] Wache, H., Dinter, B. 2020, sich seit knapp
MSc
‘The Digital Twin – Birth of an Inte- 4 Jahren mit der
grated System in the Digital Age’, in menschzentrierten Wissenschaftliche Mit-
Tagungsband des 53rd Hawaii Internati- industriellen Im- arbeiterin Fraunhofer
onal Conference on System Sciences, S. plementierung der Austria Research im
5452-5461. Mensch-Roboter- Geschäftsbereich
[ZHA20] Zhang, Z., Tang, Q., Ruiz, R. Kollaboration. Advanced Industrial
und Zhang L. 2020, 'Ergonomic Risk Management
and Cycle Time Minimization for the Dipl.-Ing. Dr. Ma-
U-Shaped Worker Assignment Assembly thias Brandstöt-
Line Balancing Problem: A Multi-Objec- ter ist seit 2015
tive Approach’, Computers and Opera- stellvertretender
tions Research. Direktor bei RO-
Dipl.-Ing. Dr.
BOTICS, dem In- Mathias Brandstötter
Autoren stitut für Robotik
Stellvertretender Di-
und Mechatronik
rektor bei ROBOTICS,
Titanilla Komenda, MSc, Jahrgang der JOANNE-
dem Institut für Robo-
1988, hat Mechatronik/Robotik UM RESEARCH
tik und Mechatronik
an der Fachhochschule Technikum Forschungsgesell-
der JOANNEUM RE-
Wien studiert. Sie ist wissenschaft- schaft.
SEARCH Forschungs-
liche Mitarbeiterin bei Fraunhofer Seine wissen-
gesellschaft
Austria Research im Geschäftsbe- schaftliche Aus-
reich Advanced Industrial Manage- bildung und be-
ment. Ihr Hauptarbeitsgebiet liegt rufliche Laufbahn sind überwiegend seiner wissenschaftlichen Arbeiten
im Bereich der Mensch-Roboter-Zu- dem Thema Robotik gewidmet und liegen in den Bereichen kollaborative
sammenarbeit. Sie hat bereits knapp er bringt seine Erfahrungen unter an- Robotersysteme, Robotersicherheit,
10 Jahre Erfahrung in der Planung, derem als Forschungskoordinator bei sensitive mobile Manipulation und
Implementierung und Optimierung ROBOTICS ein. Die Schwerpunkte Roboterkinematik.
30 WINGbusiness 2/2020Sie können auch lesen

















































