Proseminar Biomechanik - Thema: Dynamik der menschlichen Bewegung II - Universität Konstanz
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Universität Konstanz, FB Sportwissenschaft
Proseminar Biomechanik
Thema: Dynamik der menschlichen Bewegung II
Trägheitsmoment, Drehmoment, Drehimpuls
Die folgende Präsentation ist mit geringfügigen Änderungen übernommen aus
dem Seminarvortrag des PS Biomechanik aus dem SS 2006 von Julian Gangl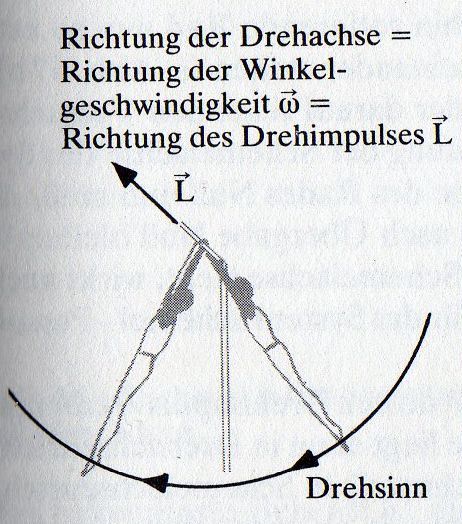
„Bisher haben wir uns mit den dynamischen Begriffen bei Translationen, also geradlinigen Bewegungen, befasst.“ = Masse, Kraft & Impuls „Die dazu analogen Grundbegriffe bei Rotations- bzw. Drehbewegungen sind Thema des heutigen Vortrags!“

Heutiges Thema: die dynamischen Grundbegriffe bei Rotationen
Trägheitsmoment, Drehmoment, Drehimpuls
Aus www.dotnet-magazin.de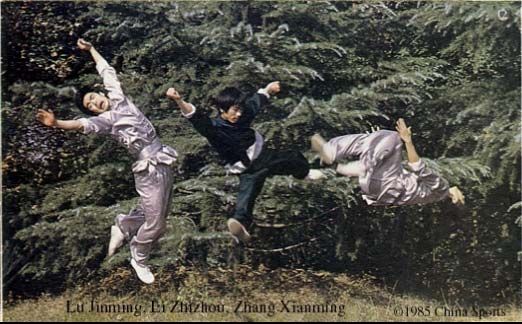
Bisherige Erkenntnis: Bei translatorischen Bewegungen ist der Widerstand, den ein Körper einer Bewegung(sänderung) entgegensetzt, als Trägheit definiert worden. Gemessen wurde durch die Masse m.

1. Das Trägheitsmoment (engl.: moment of inertia)
Beispiele für
Rotationen aus
dem Bereich des
Turnens.
Führt ein Körper eine Rotation um eine bestimmte Achse aus, dann setzt er der
Erzeugung oder der Veränderung dieser Bewegung einen Widerstand entgegen.
Diesen Widerstand bezeichnet man als Trägheitsmoment (Symbol I).
Das Trägheitsmoment ist also die für Rotationen analoge Größe zur Masse bzw. Trägheit
bei Translationen.
Das Trägheitsmoment ist von der Masse m und dem Abstand r von der
Drehachse A abhängig. Die Maßeinheit ist [kg·m²].
Für ein Masseteilchen der Masse m mit dem Abstand r
zur Drehachse A ergibt sich somit:
I = m · r²
Trägheitsmoment Masse mal Rotationsradius
Aus Bäumler/ Schneider,
Sportmechanik.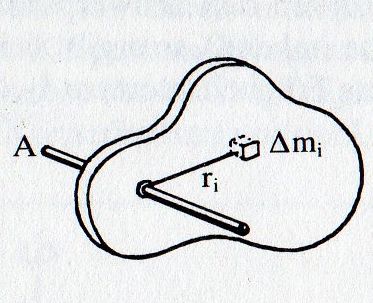
Problem: „Ein Körper besteht aus vielen Masseteilchen!!!“
Lösung: die Trägheitsmomente der einzelnen Teilchen ITeil werden aufsummiert
zu IGesamt:
I Gesamt = ∑I Teil
= ∑ i
Δ m i ⋅ ri 2
Δmi besagt, dass es sich
um das i-te
Massenteilchen mit dem
Abstand ri zur Drehachse
A handelt
Aus Bäumler/ Schneider, Sportmechanik.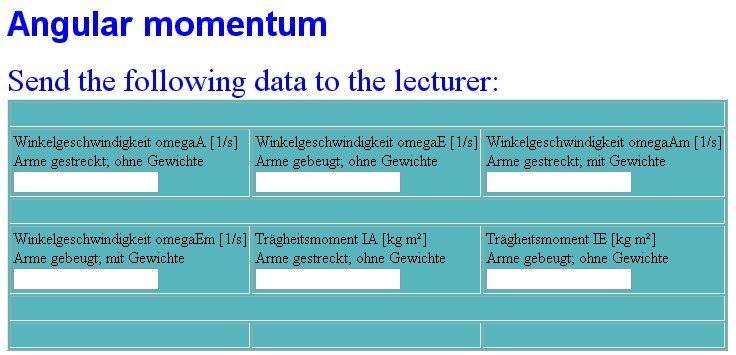
Berechnung des Trägheitsmoments für einfache Körper:
i) Berechnung von I für eine Scheibe
(Rotationsachse durch Mittelpunkt und senkrecht auf der Oberseite)
1
I Sch = m Sch ⋅ rSch ²
2
Beispiel 1: Für mSch=2kg und rSch=0.1m ergibt sich:
ISch=0.01kg m²
Aus Bäumler/ Schneider,
Sportmechanik.
ii) Berechnung von I für eine Kugel
(Rotationsachse durch Mittelpunkt)
2
IK = m K ⋅ rK ²
5
Beispiel 2: Für mK=7kg und rK=0.1m ergibt sich:
IK=0.028kg m²
Aus Bäumler/ Schneider,
Sportmechanik.
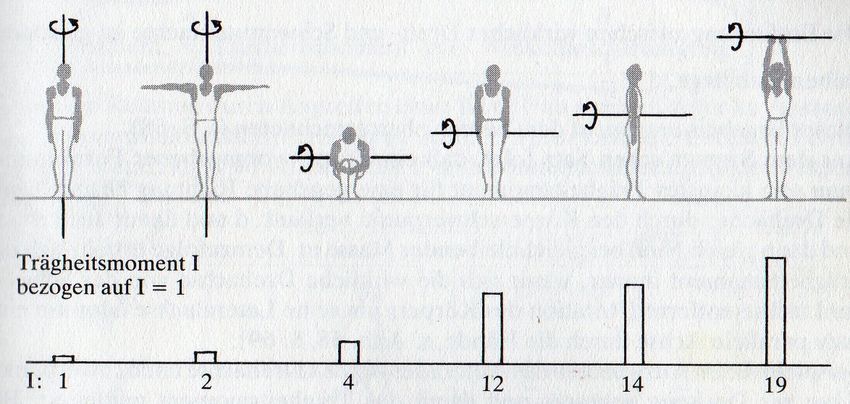
Veränderung des Trägheitsmoments durch unterschiedliche Körperhaltung
am Beispiel „Turmspringen“
I I
„eher groß“: „eher klein“:
Körperteile weit von der Rotationsachse Körperteile nahe an der Rotationsachse
entfernt gelegen
STEINER‘scher Satze: Berechnung von I wenn die Rotationsachse nicht durch
den Körperschwerpunkt fällt:
I = I KSP + d ² ⋅ m
Aus Ballreich/ Baumann, Grundlagen der
Biomechanik des Sports.Das Trägheitsmoment eines Körpers ist abhängig von
a) der unterschiedlichen Körperform,
b) der Körperhaltung und
c) der Lage der Rotationsachse.
Unterschiedliche Körperhaltungen und unterschiedliche Lagen der
Rotationsachse:
Aus Bäumler/ Schneider, Sportmechanik.Merke: Je geringer die Körpermasse ist,
je enger die Körperteile an der Rotationsachse liegen und
je näher die Rotationsachse am KSP liegt,
desto geringer ist der Widerstand = das Trägheitsmoment.„Wie kommt eine Rotation überhaupt zustande?“
„Durch das Einwirken von Drehmomenten!!“Die Verallgemeinerung des
Trägheitsmoments ist der
Trägheitstensor
• Dies ist eine Größe, die als 3x3-Matrix
dargestellt wird.
• Diese Größe ist unabhängig von der
aktuellen Richtung der Drehachse durch
den KSP.2. Das Drehmoment (engl.: torque) Ein drehbarer Körper vollzieht dann eine Rotationsbewegung, wenn der Kraftangriffspunkt nicht mit dem Körperschwerpunkt zusammenfällt. Es entsteht ein Drehmoment (Symbol T), das dem Körper eine Winkelbeschleunigung erteilt. Das Drehmoment ist das Produkt aus dem Trägheitsmoment I und der Winkelbeschleunigung α, gemessen in Newtonmeter [Nm] bzw. [kg·m²/s²]. G G T = I ⋅α Drehmoment = Trägheitsmoment mal Winkelbeschleunigung
Das Drehmoment T ist die für rotierende Körper analoge Größe zur Kraft F
bei Translationen.
Die Größe des Drehmoments lässt sich somit auch berechnen aus:
T=r·F
Das Drehmoment ist somit das
Produkt der Kraft F und dem senk-
rechten Abstand r ihrer Wirkungslinie
von der Drehachse.
r ⊥ F
r wird auch als Hebelarm bezeichnet.
Aus Baumann, Grundlagen der Biomechanik.
Streng genommen ist das Drehmoment eine vektorielle Größe, die sich aus dem
Vektorprodukt des Abstandsvektors mit dem Kraftvektor ergibt: G G G
T = r ×F
Beschränkt man sich aber auf senkrecht angreifende Kräfte, so kann man die oben
angeführte einfachere Formel benutzen.Das Drehmoment in der Form T = r · F ist entscheidend für das Verständnis des
sogenannten Hebelgesetzes.
Hebel = eine um eine Achse drehbare
Stange, an der zwei oder mehrere
Kräfte wirken.
Zweiseitiger Hebel im Gleichgewicht (eigene Grafik)
(Wippe als Beispiel für einen zweiseitigen Hebel)
Wenn gilt: F1 · r1 = F2 · r2 ,
dann befindet sich der Hebel im Gleich-
gewicht.Das Hebelgesetz lautet somit: Last mal Lastarm = Kraft mal Kraftarm
und umgeformt: Last = Kraft · (Kraftarm : Lastarm)
In der Praxis:
Je größer das Verhältnis von Kraftarm und
Lastarm ist, desto geringer die benötigte
Kraft, um am Kraftarm zu ziehen bzw. zu
drücken.
(Praktische Anwendung des
Hebelgesetzes)Auch in des sportlichen Praxis haben wir es mit Hebeln zu tun: z.B. beim Rudern An einem Ruder wirken auf der einen Seite die Muskelkraft, auf der anderen Seite die Kraft des Ruderblatts. Die Drehachse befindet sich in der Dolle.
Wann ist beim Rudern die Kraftausübung optimal?
a) Die Kräfte F1 an den Ruderblättern wirken
parallel zum Boot. Also ist auch die
Triebkraft des Bootes 2 mal F1. Die
Kraftausübung ist optimal.
b) Die Kräfte F1 wirken nun nicht mehr parallel. Es
entstehen Vektorparallelogramme und somit die Kräfte
F2 und F3 auf beiden Seiten.
Die Kräfte F2 wirken nun parallel, die Triebkraft ist
2 mal F2. Die beiden F3 heben sich dagegen auf.3. Drehimpuls -
(engl.: angular momentum)
Drehimpulserhaltungssatz
Der Drehimpuls (Symbol L) beschreibt den Bewegungszustand eines
Körpers bei rotatorischen Bewegungen.
(Wie der Impuls p bei translatorischen Bewegungen.)
Man stelle sich den Drehimpuls als Pfeil vor, dessen Richtung die Drehachse
angibt und dessen Länge den Schwung darstellt.
G
Mathematisch betrachtet erhält man somit den Drehimpulsvektor : L
Der Drehimpuls berechnet sich als Produkt von Trägheitsmoment I und
Winkelgeschwindigkeit ω und wird in [kg·m²/s] gemessen:
G G
L = I ⋅ω Drehimpuls = Trägheitsmoment mal WinkelgeschwindigkeitDie Richtung des Drehimpulsvektors stimmt bei Drehung um eine feste Achse
mit der Richtung des Winkelgeschwindigkeitsvektors und mit der Richtung der
Drehachse überein.
Aus Bäumler/ Schneider, Sportmechanik.
Zur Veranschaulichung:
Die gekrümmten Finger zeigen die
Richtung der Drehung,
der Daumen die Richtung des Dreh-
Impulses.
Aus www.wikipedia.de„Wie kommt es, dass eine Frisbeescheibe, der
ein Drehimpuls erteilt wird, eine gleichmäßige
Flugbahn vollzieht?“
Angenommen es greifen keine Drehmomente von außen an, so verändern
sich weder Betrag noch Richtung des Drehimpulses, der Drehimpuls bleibt
also erhalten.
Der Drehimpulserhaltungssatz lautet:
„Wenn keine äußeren Drehmomente angreifen, bleibt der gesamte Drehimpuls
zeitlich konstant.“
(Bäumler/ Schneider, S. 76)
(Der Drehimpulserhaltungssatz gilt streng genommen nur in einem „abgeschlossenen
System“, in dem zwischen einem Körper und seiner Umwelt keine Wechselbeziehungen
stattfinden.)Der Drehimpuls L hängt sowohl vom Trägheitsmoment I als auch von der
Winkelgeschwindigkeit ω ab (L = I · ω).
Bleibt nun L stets konstant, so muss ,wenn I sich verkleinert, ω im gleichen Maße
größer werden und andersrum.
Eines der gängigsten Beispiele für die Nutzung des Drehimpulserhaltungssatzes ist
die Pirouettenbewegung beim Eiskunstlauf.
Aus Ballreich/ Baumann, Grundlagen der
Biomechanik des Sports.
I groß I klein
ω klein ω groß
Legt der Eiskunstläufer während der Pirouette die zuvor ausgestreckten Arme
eng an den Körper, so verkleinert er sein Trägheitsmoment I und erhöht im
selben Ausmaß seine Winkel- bzw. Drehgeschwindigkeit ω.
Die Drehung wird somit beschleunigt.Fazit: „die Drehgeschwindigkeit ist steuerbar!!“
Weitere Beispiele für die Nutzung des Drehimpulserhaltungssatzes im Sport:
-Sprünge im Turnen (Salti), Turmspringen, Ballett, Kampfsport...
-Diskuswerfen (beim Abwurf wird dem Diskus ein Eigendrehimpuls erteilt,
bei optimaler Ausführung behält der Diskus eine stabile Lage in der Luft)
-Videobeispiele-Literatur
Bäumler G., Schneider K.: Sportmechanik. Grundlagen für Studium und Praxis.
München 1981.
Ballreich R., Baumann W.: Grundlagen der Biomechanik des Sports.
Probleme, Methoden, Modelle. Stuttgart 1996.
Baumann W.: Grundlagen der Biomechanik. Schorndorf 1989.
Baumann H., Reim H.: Bewegungslehre. Frankfurt am Main 1989.
http://www.wikipedia.de (letzter Zugriff am 19.06.2006)Activity 06
Activity
Wir messen die Zeit T für eine Umdrehung um die Körperlängsachse auf einem
Drehstuhl:
TA = Zeit, wenn Arme gestreckt TA′ = Zeit, wenn Arme gestreckt mit Gewichten
TE = Zeit, wenn Arme gebeugt TE′ = Zeit, wenn Arme gebeugt mit Gewichten
2π 2π
aus TA folgt ωA =
TA
aus TA′ folgt ω ′A =
T A′
2π 2π
aus TE folgt ωE =
TE
aus TE′ folgt ω E′ =
T E′
Wir erhalten somit die jeweiligen Winkelgeschwindigkeiten ω.Aufgrund des Drehimpulserhaltungssatzes muss gelten:
LA = LE L′A = LE′
und damit auch: und damit auch aufgrund des Steiner‘schen
Satzes:
I A ⋅ω A = I E ⋅ωE ( I A + d ² ⋅ m) ⋅ ω ′A = ( I E + h ² ⋅ m) ⋅ ω E′
(es gilt h = 0)
Durch weitere Umformungen lässt sich das Trägheitsmoment IA bestimmen:
ωE TA
I A = IE ⋅ = IE ⋅
ωA TESie können auch lesen