Diskrete Morsetheorie - Seminar Wintersemester 2018/2019 Susanne Krömker - Universität Heidelberg
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Diskrete Morsetheorie Seminar Wintersemester 2018/2019 Susanne Krömker
Widmung an meine Lehrer
Alle Fotos entstammen der Oberwolfach Photo Collection
Dieter Puppe Willi Jäger Albrecht Dold
16.12.1930 – 13.08.2005 * 15.08.1940 05.08.1928 – 26.09.2011
Topologie, U Heidelberg Analysis, U Heidelberg Topologie, U Heidelberg
1968 – 1996 1974 – to date 1963 – 1996
25. Oktober 2018 Visualisierung & Numerische Geometrie 2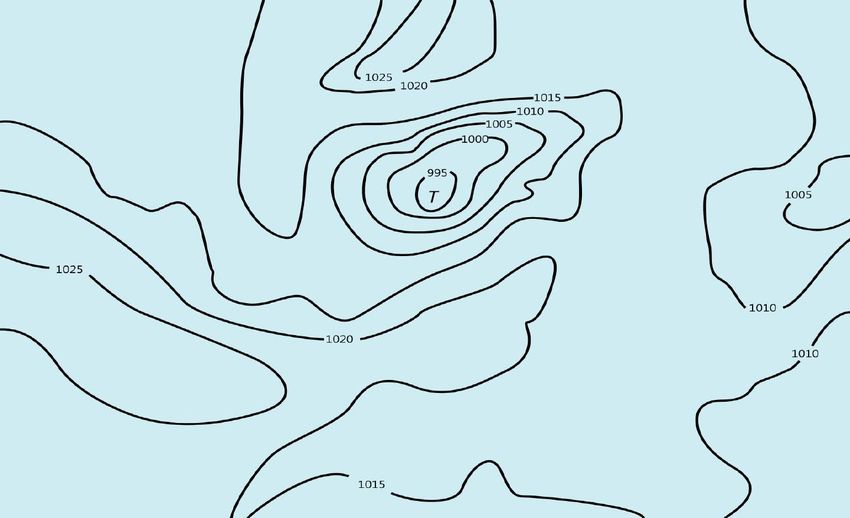
Morsetheorie
analysiert die Topologie einer Mannigfaltigkeit
über das Studium der differenzierbaren
Funktionen auf dieser Mannigfaltigkeit
und gehört in den Bereich der
Differentialtopologie.
Marston Morse
24.03.1892 – 22.06.1977
25. Oktober 2018 Visualisierung & Numerische Geometrie 3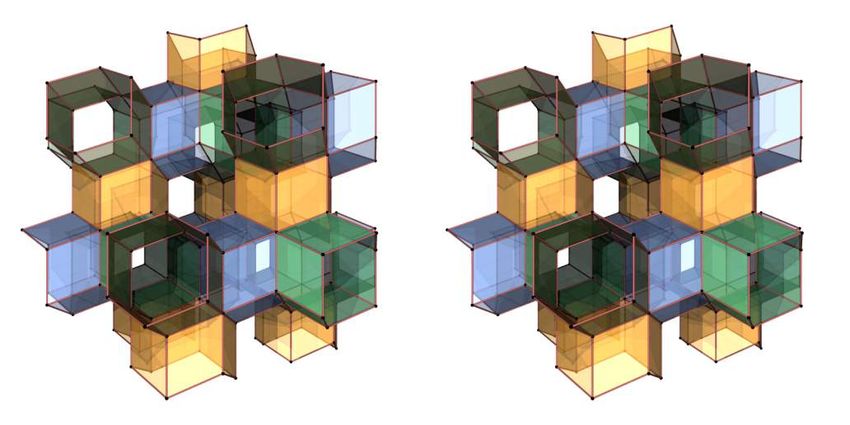
Diskrete Morsetheorie
ist eine diskrete Adaption der Morsetheorie mit
praktischen Anwendungen in der Informatik
zum Berechnen der Homologie.
Über den Begriff der Persistenz kann damit
Datenrauschen entfernt (Denoising) und
Datenreduktion (Mesh compression) betrieben
werden.
Robin Forman
PhD Harvard University 1985
25. Oktober 2018 Visualisierung & Numerische Geometrie 4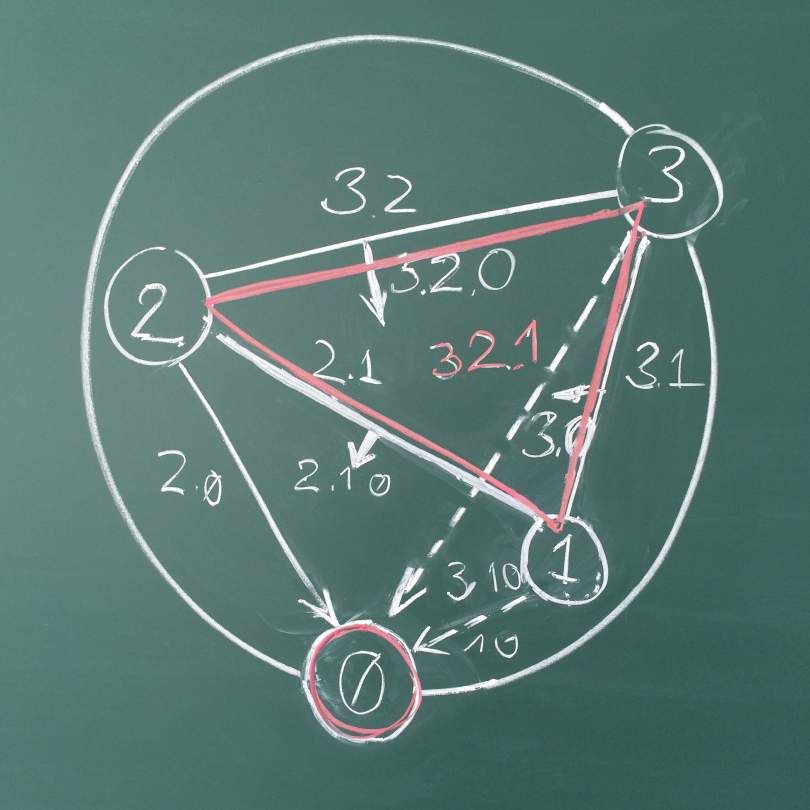
Seminar Diskrete Morsetheorie In diesem Seminar sollen die topologischen Methoden vorgestellt werden, die zunehmend in der Visualisierung und zur Datenreduktion eingesetzt werden. Die für numerische Berechnungen nötige Diskretisierung ist häufig viel feiner als nötig, um Einblick in die qualitative Struktur der Ergebnisse in Begriffen wie Quellen und Senken zu geben. Das Bestimmen von Schwellwerten zur Extraktion von Isoflächen mit hoher Persistenz ihrer kritischen Punkte spielt dabei eine große Rolle. 25. Oktober 2018 Visualisierung & Numerische Geometrie 5

Venue: Heidelberg Institute for Theoretical Studies – Studio Villa Bosch
Herbert Edelsbrunner, IST Austria
Heather Harrington, U Oxford
Ulrich Bauer, TU Munich
Egor Shelukhin, U Montreal
The workshop is free and open to everybody. Due to space limitations, please register
for this workshop with name and affiliation at persistence@mathi.uni-heidelberg.de.
25. Oktober 2018 Visualisierung & Numerische Geometrie 6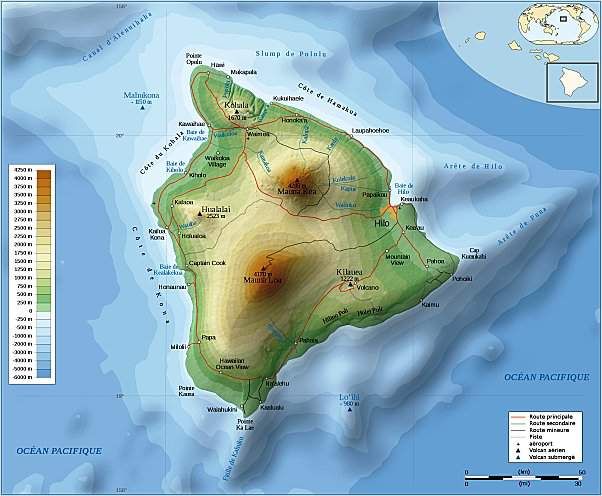
Schedule 10:00-11:00 Registration and coffee 11:00-12:00 Herbert Edelsbrunner – IST Austria 12:00-13:30 Lunch 13:30-14:30 Heather Harrington – University of Oxford 14:30-15:15 Coffee Break 15:15-16:15 Ulrich Bauer – Technische Universität München 16:30-17:30 Egor Shelukhin – University of Montreal 25. Oktober 2018 Visualisierung & Numerische Geometrie 7
Stochastic Geometry with
Topological Flavor Herbert Edelsbrunner
Abstract: We study classical questions in stochastic geometry, such as the expected
density of p-simplices in the Delaunay mosaic of a Poisson point process in
d-dimensional Euclidean space. Using a discrete Morse theory approach, we
distinguish between critical and non-critical points of the radius function and
determine their expected densities dependent on a radius threshold. We generalize
the analytic results to weighted Delaunay mosaics and to order-k Delaunay mosaics,
and we present experimental result for wrap complexes and for weighted Voronoi
tessellations.
25. Oktober 2018 Visualisierung & Numerische Geometrie 8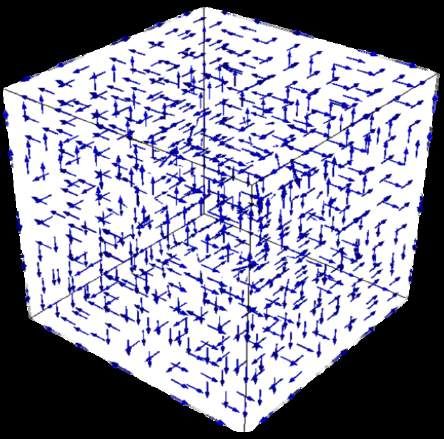
Comparing models
and data Heather Harrigton
Abstract: The challenge with analyzing mathematical models based on differential
equations is that the rate constants, often referred to as parameter values, are
difficult to measure or estimate from available data. Depending on the type of data
available, and the type of model constructed, we have combined techniques from
computational algebraic geometry and topology, with statistics, networks and
optimization to compare and classify models without necessarily estimating
parameters. Specifically, we use computational algebraic geometry (e.g., Gröbner
bases) and computational algebraic topology (e.g., persistent homology).
Applications of our methodology on datasets involve models on cancer. I conclude
with analyzing spatio-temporal datasets with multiple parameters using
computational algebraic topology finding discriminating and computable invariants.
25. Oktober 2018 Visualisierung & Numerische Geometrie 9
On persistence modules in
symplectic topology Egor Shelukhin
Abstract: To resolve V. Arnol'd's famous conjecture from the 1960's on the number of
fixed points of a Hamiltonian diffeomorphism of a symplectic manifold, A. Floer has
associated in the late 1980's a homology theory to the Hamiltonian action functional
on the loop space of the manifold. It has long been known that Floer homology can
be filtered by the values of the action functional, yielding information about metric
invariants in symplectic topology (Hofer's metric, for example). We discuss recent
interactions between this filtered version of Floer theory and persistent homology,
providing examples of new results.
25. Oktober 2018 Visualisierung & Numerische Geometrie 10H. Edelsbrunner im HITS Kolloquium
Computational Geometry stellt eine Brücke zur
Topologie her.
ist eine postgraduale
Wissenschaftseinrichtung
in Klosterneuburg bei
Wien, die ein
interdisziplinäres
Herbert Edelsbrunner PhD-Programm anbietet.
* 14.03.1958
25. Oktober 2018 Visualisierung & Numerische Geometrie 11Computational Topology
Weitere Vortragende am 19. Nov
• Heather Harrington
U Oxford, Mathematical Institute
• Ulrich Bauer
TU München, Angewandte Topologie und Geometrie
• Egor Shelukhin
U Montreal, Mathematics and Statistics
https://sites.google.com/view/persistence-in-heidelberg/home
25. Oktober 2018 Visualisierung & Numerische Geometrie 12Teilnehmer Seminar | Proseminar
––––––––––––––––––––––
Mathematik BSc 50%
Mathematik BSc 100%
Mathematik MSc I
Angewandte Informatik BSc 50% I
Angewandte Informatik BSc 100% I
Angewandte Informatik MSc III
Master of Scientific Computing
25. Oktober 2018 Visualisierung & Numerische Geometrie 13Termine und Vorträge Donnerstags, 14h15, Seminarraum 11 Beginn 25.10. Einführungsvortrag – Susanne Krömker Weitere Termine: 1.11. kein Seminar! (Feiertag) 8.11., 15.11.,19.11. ganztags, 22.11., 29.11. November: 4 Vorträge 6.12., 13.12., 20.12. (Weihnachtsveranstaltung) Dezember: 2 bis 3 Vorträge 10.01.,17.01., 24.01., 31.01. Januar 2019: 4 Vorträge 07.02 Februar 2019: Abschluss 25. Oktober 2018 Visualisierung & Numerische Geometrie 14
Termine – alternativ Blockseminar zu Beginn 2019 (nach Vereinbarung) mit 25.10. Einführungsvortrag – Susanne Krömker Weitere Termine: 19.11. ganztags An Donnerstagen Besprechung und Erarbeitung der Vortragsthemen Februar 2019: Abschluss 25. Oktober 2018 Visualisierung & Numerische Geometrie 15
Topologischer Raum
Definition (Topologie)
Ein topologischer Raum ist ein Paar (X,T), wobei X eine Menge von
Punkten ist und T eine Familie von Untermengen von X, so dass
1) ∅ E T und X E T
∩
2) für T ⊂ T gilt, dass TET
3) für endlich viele T ⊂ T gilt ∩ T E T
Die Menge T der offenen Mengen nennt man eine Topologie.
25. Oktober 2018 Visualisierung & Numerische Geometrie 16Beispiele für (Mengen) Topologien
Drei Topologien T für die gleiche Grundmenge X = { , , }
∅ ∅ ∅
1) ∅ E T und X E T
∩
2) für T ⊂ T gilt, dass TET
3) für endlich viele T ⊂ T gilt ∩ T E T
25. Oktober 2018 Visualisierung & Numerische Geometrie 17Kreis ... oder S1 mit einem Gradientenfluss, so dass vom obersten Punkt entlang der eindimensionalen Mannigfaltigkeit alles abwärts fließt, um sich im untersten Punkt zu sammeln. 25. Oktober 2018 Visualisierung & Numerische Geometrie 18
Sphäre ... oder S2 mit einem Gradientenfluss, so dass vom obersten Punkt entlang der zweidimensionalen Mannigfaltigkeit alles abwärts fließt, um sich im untersten Punkt zu sammeln. 25. Oktober 2018 Visualisierung & Numerische Geometrie 19
Torus ... oder T2 = S1 x S1 mit einem Gradientenfluss, so dass vom obersten Punkt entlang der zweidimensionalen Mannigfaltigkeit alles abwärts fließt, um sich im untersten Punkt zu sammeln. 25. Oktober 2018 Visualisierung & Numerische Geometrie 20
Scheibe …kann auf einen Punkt zusammengezogen werden. 25. Oktober 2018 Visualisierung & Numerische Geometrie 21
Kurze Einführung
• Grundbegriffe
– Simpliziale Komplexe
– Mannigfaltigkeiten und Gitter
• Morsefunktion
– Gradientenfluss
– Kritische Punkte
• Topologische Invarianten
– Homologiegruppen
– Bettizahlen
25. Oktober 2018 Visualisierung & Numerische Geometrie 22Simplex
“In geometry a simplex (pl.: simplices) is a generalization of the
notation of a triangle or tetrahedron to arbitrary dimensions.”
https://en.wikipedia.org/wiki/Simplex
0-Simplex ist ein Punkt
1-Simplex ist ein Strecke
2-Simplex ist ein Dreieck
3-Simplex ist ein Tetraeder
…
K-Simplex ist ein Polytop, die konvexe Hülle von (k+1) Eckpunkten
25. Oktober 2018 Visualisierung & Numerische Geometrie 23Ein simplizialer Komplex K …ist eine Menge zusammenhängender oder unzusammenhängender Simplizes. 25. Oktober 2018 Visualisierung & Numerische Geometrie 24
Simplizialer Komplex K
Definition
Ein simplizialer Komplex K ist eine Menge von Simplizes, die
folgende Bedingungen erfüllen
1. Jeder Rand (face) eines Simplex aus K ist wieder in K.
2. Der Schnitt von je zwei Simplizes σ1, σ2 aus K ist leer oder stellt
den Rand (face) beider Simplizes σ1 und σ2 dar.
25. Oktober 2018 Visualisierung & Numerische Geometrie 25Kubischer Komplex
Häufig in numerischen Simulationen
für die Diskretisierung des 3D Raums
genutzt oder …
… bei der schichtweisen
Aufzeichnung von CT- oder
MRT-Messdaten
25. Oktober 2018 Visualisierung & Numerische Geometrie 26Konstruktion eines Torus
ausgedehnt zum Reifen
mit weiterem Henkel
ausgedehnt zum Zylinder
mit einem Henkel
Scheibe
Bemerkung:
Ein CW-Komplex ist ein Closure-finite complex mit einer Weak topology
Punkt nach J.H.C. Whitehead, Begründer der Homotopie-Theorie
25. Oktober 2018 Visualisierung & Numerische Geometrie 27Homeomorphismus
Ein Homeomorphismus (auch topologischer Isomorphismus) ist ein zentraler
Begriff aus der Topologie. Die Definition der Stetigkeit hängt dabei von
der betrachteten Topologie ab.
Definition (Homeomorphismus)
Seien X und Y topologische Räume. Eine Abbildung f: X → Y heißt
homeomorphismus genau dann wenn
1) f ist bijektiv
2) f ist stetig
3) die Umkehrfunktion f –1 ist ebenfalls stetig
25. Oktober 2018 Visualisierung & Numerische Geometrie 28Homotopie
Eine stetige Deformation zwischen
zwei Abbildungen.
Beispiel: Ein Becher wird in einen
Torus deformiert.
Definition (Homotopie)
Eine Homotopie zwischen zwei stetigen Abbildungen
f,g: X → Y eines topologischen Raums X in einen
anderen topologischen Raum Y ist eine stetige Abbildung
H: X x [0,1] → Y
mit der Eigenschaft
H (X,0) = f(x) und H (X,1) = g(x)
auf dem Einheitsintervall [0,1].
Der erste Parameter stellt die Urbildmenge dar und der zweite den Grad
der Deformation, eine Art „zeitlicher“ Entwicklung in der Animation.
25. Oktober 2018 Visualisierung & Numerische Geometrie 29Morsetheorie
Eine Landschaft mit Wasser zu fluten ändert die Topologie der Region
oberhalb eines festen Werts für die Höhe f(x) = a. Die Bereiche unter
Wasser (mit Höhenwerten ≤ a) sind das Bild der inversen Funktion
f −1 (-∞, a] = { xi , yi }. Die Qualität der Oberfläche ändert sich, sobald
a die Höhe eines kritischen Punkts erreicht. In kritischen Punkten
verschwindet der Gradient von f.
Die Topologie ändert sich genau dann
wenn das Wasser beginnt
1) ein Tal oder Senke zu füllen = Minimum
2) einen Bergpass zu queren = Sattelpunkt
3) eine Bergkuppe zu fluten = Maximum
25. Oktober 2018 Visualisierung & Numerische Geometrie 30Morsefunktion Eine Morsefunktion f : M → IR ist eine Funktion, die jeden Punkt einer Mannigfaltigkeit M beispielsweise auf die Höhe über dem Meeresspiegel abbildet. 25. Oktober 2018 Visualisierung & Numerische Geometrie 31
Was sind Isolinien?
Level Sets
sind Mengen mit konstanten Werten (Höhe).
Punkte oder Isowerte am Konturlinien oder Isolinien als Gekrümmte oder Isoflächen
Rand von Schnittlinien Rand von Schnittebenen als Rand von Volumina
f(x1) = x2 = const. f(x1,x2 ) = x3 = const. f(x1,x2,x3) = x4 = const.
25. Oktober 2018 Visualisierung & Numerische Geometrie 33Stabile/instabile Mannigfaltigkeiten
Die potentielle Höhe einer Mannigfaltigkeit ist eine Morsefunktion.
Das (negative) Gradientenvektorfeld der Höhenfunktion induziert einen
Gradientenfluss entlang der Oberfläche.
Stabile Mannigfaltigkeiten
allen Punkte, die sich auf einen Zustandswert
hin entwickeln.
Instabile Mannigfaltigkeiten
allen Punkte, die sich von einen Zustandswert
weg entwickeln.
25. Oktober 2018 Visualisierung & Numerische Geometrie 34Kritische Punkte bei f(x1, x2) = x3
Minimum
dim(Minstabil) = 0
Sattelpunkt
dim(Minstabil) = 1
Maximum
dim(Minstabil) = 2
25. Oktober 2018 Visualisierung & Numerische Geometrie 35Affensattel, degenerierter kritischer Punkt Sei f(x,y) = x3 – 3 xy2 Erste Ableitungen df(x,y)/dx = 3 x2 – 3 y2, df(x,y)/dy = – 6 xy verschwinden im kritischen Punkt f(0,0) = 0 df(0,0)/dx = 0, df(0,0)/dy = 0 Zweite Ableitungen d2f (0,0)/dx2 = 0, d2f(0,0)/dxdy = 0, d2f(0,0)/dy2 = 0 verschwinden ebenfalls. Der kritische Punkt ist degeneriert. 25. Oktober 2018 Visualisierung & Numerische Geometrie 36
Morse Lemma
Theorem
Sei f : IRn → IR eine Funktion in C∞ (oder mindestens C2 ) und 0 ein nicht
degenerierter kritischer Punkt, also ∇f(0) = 0 und die Hesseform in 0 hat
trivialen Kern. Dann gibt es in einer lokalen Umgebung U von 0 einen C∞
Diffeomorphismus
φ : U → V ⊂ IRn,
mit φ(0)= 0, so dass die Abbildung f´ = f ∘φ−1 von der Form
f´(x) = f(0) – x12 – … – xλ2 + xλ+12 … + xn2
ist. Dabei ist λ der Morseindex des kritischen Punktes von f, also die Anzahl
der negativen Eigenwerte der Hessematrix mit algebraischer Vielfachheit.
25. Oktober 2018 Visualisierung & Numerische Geometrie 37Morse Lemma in 2D
Theorem
Sei f : IR2 → IR eine Funktion in C∞ (oder mindestens C2 ) und 0 ein nicht
degenerierter kritischer Punkt, also ∇f(0) = 0 und die Hesseform in 0 hat
trivialen Kern. Dann gibt es in einer lokalen Umgebung U von 0 einen C∞
Diffeomorphismus
φ : U → V ⊂ IR2,
mit φ(0)= 0, so dass die Abbildung f´ = f ∘φ−1 von der Form
f´(x) = f(0) + x12 + x22 oder f´(x) = f(0) – x12 + x22 oder f´(x) = f(0) – x12 – x22
ist. Hier kann der Morseindex λ nur die Werte 0, 1 oder 2 annehmen.
25. Oktober 2018 Visualisierung & Numerische Geometrie 38Morsefunktion Definition (Morsefunktion) Eine glatte, reellwertige Funktion f auf einer Mannigfaltigkeit M heißt Morsefunktion, wenn sie keine degenerierten kritischen Punkte hat. Bemerkung: Ein einfaches Ergebnis der Morsetheorie besagt, dass fast alle Funktionen Morsefunktionen sind. Sie bilden eine offene dichte Untermenge aller glatten Funktionen f : M → IR in der C2 Topologie. 25. Oktober 2018 Visualisierung & Numerische Geometrie 39
Morseindex
Definition (Morseindex)
Der Morseindex λ eines nicht-degenerierten kritischen Punkts von
f : M → IR ist die Anzahl der negativen Eigenwerte der Hessematrix
von f in 0 mit algebraischer Vielfachheit.
λcrit1 = 2
λcrit2 = 1
λcrit3 = 1
λcrit4 = 0
25. Oktober 2018 Visualisierung & Numerische Geometrie 40Morseindex
Der Morseindex ist eine natürliche Zahl, die die Anzahl unabhängiger
Richtungen an einem nicht-degenerierten kritischen Punkt (Maxima,
Sattelpunkte, Minima) zählt, auf denen man absteigt, d.h. auf denen die
Werte der Morsefunktion abnehmen = dim {instabile Mannigfaltigkeit}
Beispiel:
Sei M eine Landschaft. Die Morsefunktion F : M → IR ist definiert als
F (x1, x2, f(x1, x2)) = f(x1, x2) = x3 .
Die Dimension der instabilen Mannigfaltigkeit ist
2 für Maxima 1 für Sattelpunkte 0 für Minima.
25. Oktober 2018 Visualisierung & Numerische Geometrie 41Diskrete Morsetheorie Diskrete Werte für Grundbausteine – Konstruktion eines diskreten Vektorfelds – Kettenkomplexe – Datenreduktion und Persistenz – Schwellwerte für Isoflächen 25. Oktober 2018 Visualisierung & Numerische Geometrie 42
Eindimensionale Kurve mit einem diskreten Gradientenfluss: Werte in den Punkten gleich Höhe über Null 25. Oktober 2018 Visualisierung & Numerische Geometrie 43
Kreis ... oder S1 mit einem Gradientenfluss, so dass vom obersten Punkt entlang der eindimensionalen Mannigfaltigkeit alles abwärts fließt, um sich im untersten Punkt zu sammeln. 25. Oktober 2018 Visualisierung & Numerische Geometrie 44
Dreieck ist homotop zur Sphäre S1. Mit diskreten Werten in drei Punkten und zweistelligen Werten auf den verbindenden Kanten wird das qualitative Verhalten des Gradientenflusses beschrieben. 25. Oktober 2018 Visualisierung & Numerische Geometrie 45
Sphäre ... oder S2 mit einem Gradientenfluss, so dass vom obersten Punkt entlang der zweidimensionalen Mannigfaltigkeit alles abwärts fließt, um sich im untersten Punkt zu sammeln. 25. Oktober 2018 Visualisierung & Numerische Geometrie 46
Tetraeder ist homotop zur Sphäre S2. Mit diskreten Werten in vier Punkten, zweistelligen Werten auf den verbinden- den Kanten und dreistellig- en Werten auf den Flächen wird das qualitative Verhal- ten des Gradientenflusses beschrieben. 25. Oktober 2018 Visualisierung & Numerische Geometrie 47
A
B
25. Oktober 2018 Visualisierung & Numerische Geometrie 48Torus ... oder T2 = S1 x S1 mit einem Gradientenfluss, so dass vom obersten Punkt entlang der zweidimensionalen Mannigfaltigkeit alles abwärts fließt, um sich im untersten Punkt zu sammeln. 25. Oktober 2018 Visualisierung & Numerische Geometrie 49
Algorithmische Aspekte Kurze Einführung in Datenstrukturen und Prozessierung • Algorithmus 1: ProcessLowerStars • Algorithmus 2: ExtractMorseComplex • Algorithmus 3: PairCells • Algorithmus 4: EliminateBoundaries • Kubische VTK-Daten • Signifikante Wahl der Schwellwerte 25. Oktober 2018 Visualisierung & Numerische Geometrie 50
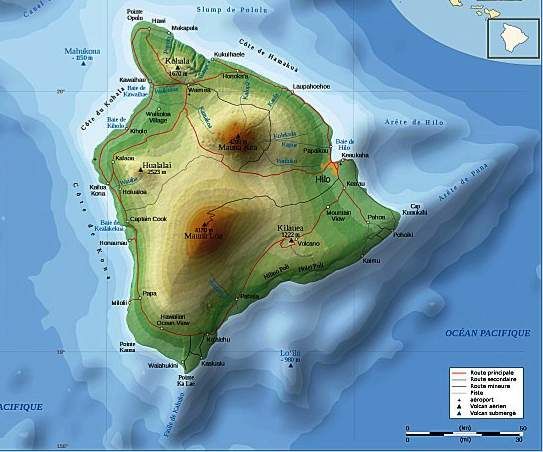
Messungen und Simulationen • Industriell erfasste Meßdaten Computed Tomography (CT) – Sandsteinblock – Metallischer Schaum • Cytokine Dynamik in Lymphzellen – Mathematisches Modell – Zeitabhängige Simulationen 25. Oktober 2018 Visualisierung & Numerische Geometrie 51
Literatur
Th. F. Banchoff
Beyond the Third Dimension. Scientific American Library (1990)
H. Carr, J. Snoeyink, U. Axen
Computing contour trees in all dimensions. University of North Carolina at Chapel
Hill (2001)
R. Forman
Morse theory for cell complexes. Advances in Mathematics, p. 90–145 (1998)
A user’s guide to discrete Morse theory. Séminaire Lotharingien de Combinatoire,
(48):1–35 (2002)
A. Gyulassy, V. Natarajan, B. Hamann
Efficient Computation of Morse-Smale Complexes for Three-dimensional Scalar
Functions. IEEE Transactions on Visualization and Computer Graphics (2007)
25. Oktober 2018 Visualisierung & Numerische Geometrie 52Literatur H. Edelsbrunner, J. Harer, A. Zomorodian Hierarchical Morse-Smale complexes for piecewise linear 2-manifolds. Proceedings of the seventeenth annual symposium on Computational geometry, ACM (2001) H. Edelsbrunner, J. Harer Persistent homology – a survey. Contemporary Mathematics, Vol. 453 (2008) L. Kolb Visualizing High-Resolution Numerical Data with Isosurfaces using Topological Methods. Bachelor Thesis, Heidelberg University (2013) L. Kolb, S. Krömker All about Cells, in: Complexity and Synergetics, Springer-Verlag Berlin (2017) J. Milnor Morse theory, volume 51 of Annals of Math. Studies. Princeton, NJ, USA (1963) 25. Oktober 2018 Visualisierung & Numerische Geometrie 53
Literatur V. Pascucci, K. Cole-McLaughlin, G. Scorzelli Multi-resolution computation and presentation of contour trees. L. Livermore Nat. Labs (2004) V. Robins, P. J. Wood, A. P. Sheppard Theory and algorithms for constructing discrete Morse complexes from grayscale digital images. IEEE Transactions on pattern analysis and machine intelligence 33(8), 1646–1658 (2011) J. Smoller Shock Waves and Reaction-Diffusion Equations. Springer Series Comp. Stud. in Math. 258 (1994) K. Thurley, D. Gerecht, E. Friedmann, T. Hoefer Three-dimensional gradients of cytokine signaling between T cells. PLOS Comput. Biol. 11(4), doi:10.1371, 1–22 (2015) 25. Oktober 2018 Visualisierung & Numerische Geometrie 54
Kontakt
Dr. Susanne Krömker
kroemker@iwr.uni-heidelberg.de
Interdisziplinäres Zentrum für Wissenschaftliches Rechnen
Universität Heidelberg, MATHEMATIKON
Im Neuenheimer Feld 205
69120 Heidelberg
Raum 05.218, Telefon 06221 54-14413
http://www.iwr.uni-heidelberg.de/groups/ngg/
25. Oktober 2018 Visualisierung & Numerische Geometrie 55Sie können auch lesen