EFS Deep Learning für das Fahren der Zukunft - Anton Junker - Microsoft
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
EFS Deep Learning für das Fahren der Zukunft Anton Junker

Wer ist die EFS? Wer sind wir?

Unternehmen
Gründung 2009 Automatisiertes Fahren
Standort Ingolstadt/Wolfsburg
Messdatenmanagement / -Analyse
Beteiligung GIGATRONIK Gruppe (51%)
Audi Electronics Venture (49%)
Technologiecenter
Virtuelle Entwicklung
Mitarbeiter 422 (März 2018)
Fahrwerkregelsysteme
Geschäftsführung
Hochintegrationsplattformen
Wilhelm Schmitt, Audi AG
Régis Sandrin, AKKA Deutschland GmbH
Wo kommen wir her? Wo wollen wir hin?

Entwicklungs Prozess Test Szenarios
Speicherung Berechnung
Traces
Implementation SIL MIL HIL
Wiederver-
Test Ergebnisse Analyse
wendung
Daten, Daten und noch mehr Daten!
Datenvolumen
RADAR in Petabyte
LIDAR
GPS ~10 - 100 KB
pro Sekunde
~10 - 70 MB „Heute generieren wir mehr 700
~50 KB pro Sekunde
Daten an einem einzelnen Tag
pro Sekunde
als im kompletten Jahr 2000“
SONAR
~10 - 100 KB (Andreas Weigert, Daimler, September
KAMERAS pro Sekunde 2017)
~20 - 40 MB
pro Sekunde 350
Autonomes Fahrzeug
4000 GB
pro Tag
0
2016 2017 2018 2019 2020 2021
Datenvolumen Audi 1945 – 2017:
>200.000 Messungen pro Tag
18 Petabyte
Speicherung 1 Petabyte > 1 Petabyte
Berechnung 125 Mio. Nutzer > 125 Mio. Nutzer
Nutzeranalyse Datenanalyse und
Analyse und Film- Funktions-
empfehlungen entwicklung
2008 2010 2014 2015 2017
Definition des Entwicklung Gründung der Verbesserung MDM@Big-
Standards in der Software- Industry Working Group der Software- Data
ASAM e.V. lösung lösung
openMDM openMDM
Peter ist Entwickler bei AUDI und arbeitet
an smarter Lüftungssteuerung
Peter möchte wissen wie sich die smarte
Lüftung nach einem Gewitter bei hohen
Temperaturen auf der Autobahn verhält
Bisher: mit Big Data Plattform:
? ? Peter muss in verschiedenen
Fachabteilungen nachfragen, ob Peter nutzt eine einheitliche
sie zufällig wissen, ob solche Oberfläche um alle Daten zu
Messungen gemacht wurden finden, die im AUDI Konzern
gesammelt wurden
MDM@
Peter muss viele GB an Daten Big Data Er wertet sie mit modernen Tools
herunterladen direkt online aus
Aufwändige Analyseverfahren wie
Peter muss die Daten mit
Machine Learning können
eigenen Methoden
nahtlos integriert werden
durchsuchen
Viel Aufwand, wenig Ergebnis Wenig Aufwand, optimales Ergebnis
Komplette
Migration in
Public Cloud
Cerebro
Hue ….Deep Learning für das autonome Fahren
1961 1984 1997 2007 2012 2017
$ 153 Mrd. $ 44 Mio. $ 30 k $ 57 $ 0.8 $ 0.03
100 Mrd.
10 Mrd.
Preis pro TeraFLOP in Dollar
1 Mrd. Artificial Intelligence (deutsch: Künstliche Intelligenz)
100 Mio.
10 Mio.
1 Mio. Machine Learning (deutsch: Maschinelles Lernen)
100 k
10 k • Deep Learning (deutsch:
1k
100 Tiefes Lernen)
10
1$
0.1
0.01
1950 1960 1970 1980 1990 2000 2010 2020Erkennung komplexer Rechenleistung
Muster
Trainingsdaten
Verarbeitung
verschiedener Inputs Black Box
Bild und
Videodaten• Erkennung komplexer Zusammenhänge ähnlich der menschlichen Wahrnehmung
• Einschätzungen jenseits der Möglichkeiten anderer (teurerer) Sensoren möglich
• Long Range Radar < 200 m
• Lidar < 120 m
Live Bild von Convolutional Neural Erkenntnis über
Fahrzeugkamera Network Straßensituation
Zahlenwert
z.B. Entfernung eines
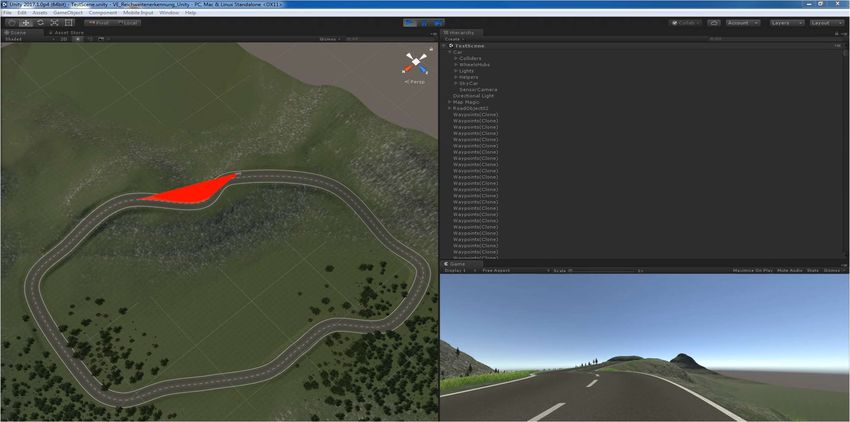
weitentfernten FahrzeugsVirtuelle Trainingsdaten: Reale Trainingsdaten:
- Generierung realistischer Umgebungen in - Aufzeichnen von Testfahrten mit 4K Kamera + GPS
Unity Empfänger
- Vollautomatisches Labeling große Mengen - Labeling von Hand mit Hilfe von Satellitenkarten
an Trainingsdaten - Durch Tools relativ effizient
- Optimale Genauigkeit der Labels - Ungenauigkeit der GPS Daten und des Labelings
- Verschiedenste Einflussfaktoren kontrolliert Schätzungsweise +/- 10 Meter gesamt
darstellbar
Bild von Fzg fehlt
SO VIEL WIE MÖGLICH SO WENIG WIE NÖTIGVirtuelle
Trainings-
daten Azure
…
Reale
Trainings-
daten
Bilder
~200 GB
pro Stunde
manuelles Labeling„Man kann einem neuronalem
Netz fast alles beibringen, wenn
man nur genügend Daten hat“
Daten, Daten, Daten (Andrej Karpathy, Tesla, 2016)
Trainingsdaten
Neuronales Netz
Messdatenmanagement© 2018 Microsoft Corporation. All rights reserved.
Sie können auch lesen

















































