Ergebnispräsentation des Leitprojekts Digibus Austria
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Österreichisches Leitprojekt für automatisiertes
Fahren im öffentlichen Personennahverkehr.
Ergebnispräsentation
des
Leitprojekts
Digibus® Austria
25.03.2021, 10 – 12 Uhr, Zoom-Meeting
Koordinator Partner
Assoziierte Partner Fördergeber
© wildbild/Salzburg Research/EasyMile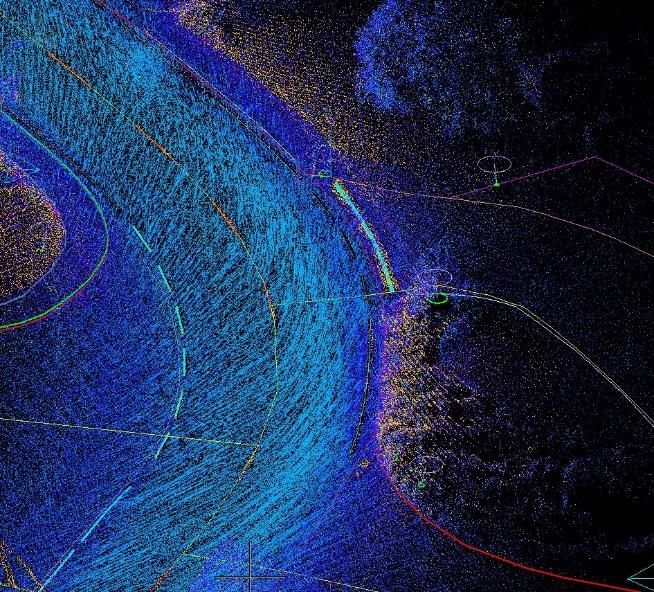
36 Monate Forschung mit dem Digibus®
25.03.2021
2
Digibus® Austria Vorgehensmodell für den
Betrieb von automatisierten Shuttles
25.03.2021
3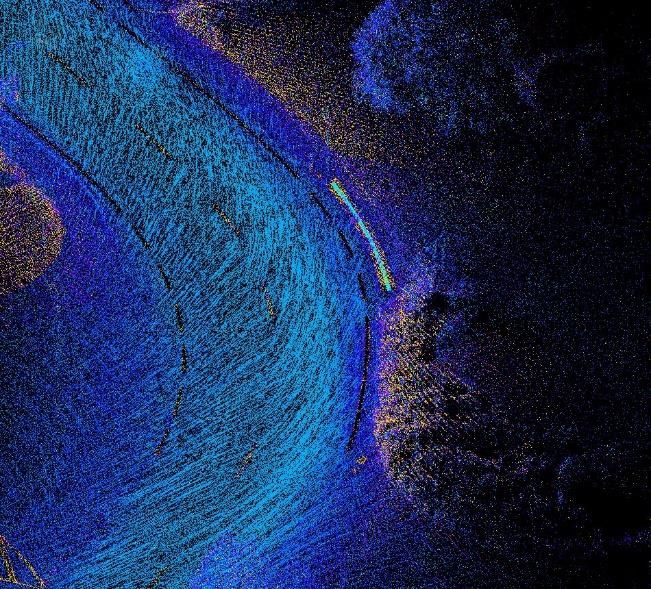
Phase I: Start
• Welche Schritte sind in der
Startphase erforderlich, um
eine realistische Planung für
den Betrieb eines
automatisierten Shuttles
durchzuführen?
25.03.2021
4
Phase I: Machbarkeitsprüfung für Strecken
Dauer ca. 3 Stunden
K.O.-Kriterien Hohes Risiko POIs
Geschw. > 50km/h Geschw. > 30km/h Schule
Eisenbahnkreuzung Unfallhäufungsstelle Kindergarten
Steigung > 14% Parkende Fahrzeuge Altersheim
Unzureichende Hohes Einkaufszentrum
Kommunikation/ Verkehrsaufkommen
Lokalisierung
25.03.2021
5
Phase II: Vorbereitung / Risikobewertung
• Wie lässt sich das Risiko einer
Fahrtstrecke systematisch
bewerten bzw. wie kann
virtuelle Risikoanalyse zum
sicheren Deployment eines
automatisierten Shuttles
beitragen?
25.03.2021
6
Phase II: Risikobewertung - Methodik
25.03.2021
7
Phase II: Risikobewertung - Methodik
• Streckenbereiche
(ohne Längenbegrenzung)
• Kreuzungsbereiche
+-50m
• Ungeregelte Querungsbereiche
+-25m
• Haltestellenbereiche
+-50m
25.03.2021
8
Phase II: Risikobewertung - Methodik
25.03.2021
9
Phase II: Risikobewertung – Mobiles Tool
25.03.2021
10Phase II: Ergebnis der Risikobewertung
25.03.2021
11Phase II: Virtuelle Risikoanalyse
25.03.2021
12Phase II: Virtuelle Risikoanalyse - Evaluierung von Fahrszenarien
Risk Assessment Deployment
Simulation
Kollisions-
Framework – classic approach
vermeidung
Road
Fahrfunktions- Sensors
Driving Vehicle Network
(.xodr-File)
Surroundings
Function Dynamics
entwicklung
Dynamic Environment
Static Environment (e.g., pedestrians,
traffic)
Virtual
Environment
Virtuelle Umgebung
Scenario
Scenario modelling Trajektorien-
optimierung
Environment tool development
25.03.2021
13Simulation Framework – classic approach
Phase II: Virtuelle Risikoanalyse - Evaluierung von Fahrszenarien
Risk Assessment Deployment
Road
Driving Vehicle Network Surroundings
Sensors (.xodr-File)
Function Dynamics
Pfad- Dynamic Environment
planung Static Environment (e.g., pedestrians,
traffic)
Virtual VRU Erkennung
Environment
Scenario modelling
Scenario
Integration von Sensormodellen
25.03.2021
14Phase II: Virtuelle Risikoanalyse - Ergebnisse
Time to clear junction: 15.82 s
Time to clear junction: 9.81 s
Tieber et al. (2020): A best practice for the lean Weissensteiner et al. (2020): Virtual risk assessment for the
development of automated driving function concepts deployment of autonomous shuttles, Virtual ITS European
to reduce integration risks, ITSC 2020 Congress 2020
25.03.2021
15Phase II: Virtuelle Risikoanalyse - Ergebnisse
Tieber et al. (2020): A best practice for the lean
development of automated driving function
concepts to reduce integration risks, ITSC 2020
Time to clear
Time to clear junction: 15.82 s
junction: 9.81 s Weissensteiner et al. (2021): „Risk minimisation for autonomous shuttles in
Weissensteiner et al. (2020): Virtual risk assessment suburban environments based on virtual validation“ (ITS World Congress 2021,
for the deployment of autonomous shuttles, Virtual
ITS European Congress 2020 Hamburg, Submitted)
25.03.2021
16Phase III: Einrichtung / Virtuelle Fahrumgebung
• Wie kann die virtuelle
Fahrumgebung beim Betrieb
eines automatisierten Shuttles
unterstützen?
25.03.2021
17Phase III: Erstellung der HD-Karte
• Vorgehensmodell zur Erstellung der HD-Karte
25.03.2021
18Phase III: Datenerfassung der Fahrumgebung
Positionierung – 2x Laserscanner
Stereo-Kamerasystem
• Erfassung der Testgebiete Applanix POS LV420 Velodyne VLP-16
Koppl und Teesdorf
Laserscanner
Fraunhofer PPS+
• Laserscanning und Video
• Postprozessierung Trajektorie
• Eposa-Korrekturdaten
• Berechnung Punktwolken
• Boresight-Alignment
• Kalibrierplatz
25.03.2021
19Phase III: Objektextraktion und Export
• Extraktion mit TopoDOT
• Bodenmarkierungen
• Verkehrszeichen
• Ampelmasten
• Straßenlaternen, Leitpflöcke
• Fahrbahnrand (Gehsteig, Bankett)
• Haltestellen
• Export als XML / CSV (Geometrie) als Input für
OpenDrive-Generierung inkl. Objektbedeutung
25.03.2021
20Phase III: Validierung der Genauigkeit
Koppl
25.03.2021
21Phase III: Resümee Datenerfassung
• Erfassung in kurzer Zeit möglich, keine besonderen Vorkehrungen
(Straßensperre etc.)
• Extraktion Automatisierung unterschiedlich weit fortgeschritten und stark von
der Qualität der Infrastruktur abhängig
• Automatisierung für „röhrenförmige Objekte“ (Straßenlaternen, Verkehrszeichensteher)
sehr hoch
• Bodenmarkierungen – stark von Ausführung und Qualität abhängig
• Fahrbahnrand – Bankett – Grenze oft nicht eindeutig
• Validierung muss gut geplant sein - Anforderungen HD Map „10 cm
Genauigkeit“ eingehalten
• Ausblick
• Semantische Klassifizierung als Vorstufe der Extraktion
• Zukünftig Datengrundlage bereits (teilweise) vorhanden?
25.03.2021
22Phase III: Erstellen der HD-Karte + Fahrspur
HD Karten-Formate:
Extrahierte Statische Verkehrsregeln https://www.asam.
Features Informationen modellieren OpenDRIVE® net/standards/detail
/opendrive/
HD Geometrien modellieren Geschwindigkeits-
Opendrive
2 anelet
(Abgrenzungen, Straßenabschnitte, limit, Fahrverbote,
Fahrbahn- Kreuzungen Vorrangsregeln
markierungen, Mit MODAL-X von Forschungszentrum
Objekte, …) PRISMA solutions Information
Lanelet2 in Karlsruhe
30 STOP
https://www.fzi.de/
graphium
lanelet2
https://github.com/
Graphium graphium-project
25.03.2021
23
Hintergrund Luftbild: © basemap.atPhase III: Einsatzgebiete für die HD-Karte
Site Assessment Report Generierung der Fahrspur für Optimierung der Fahrlinie
Phase II: Vorbereitung
während Planung (Phase 2) autonome Fahrzeuge durch Simulation
(Echtzeit)-Referenzierung der Analyse der Positionierungs-
Phase V: Evaluierung
Fahrdaten (Map Matching) zuverlässigkeit
25.03.2021
24Phase III: Analyse der Positionszuverlässigkeit
Abweichung von Fahrlinie Beispielfahrt
(Fahrten im Dez. 2020) Alle Fahrten
Median p99 p99,9
Gerät
[cm] [cm] [cm]
EZ10-Gen3 1,3 7,8 36,2
Leica GG04plus 8,0 35,7 352,5
Xiaomi Mi9 122,9 369,4 587,4
C-ITS OBU 72,6 280,8 395,1
25.03.2021
25Phase III: Digitale Infrastruktur / V2X / C-ITS
Generelle Gefahrenhinweise: ITS-G5 DENM Ampelsignalphasen: ITS-G5 SPaT/MAP
Positionsgenauigkeitsverbesserung: ITS-G5 RTCMEM Fahrzeug Monitoring: ITS-G5 CAM
25.03.2021
26Phase III: Einrichtung V2X-Kommunikation / C-ITS
Errichtung 5x RSU in Koppl Errichtung 1x RSU & Ampelsteuerung in Teesdorf Ausstattung des Shuttles mit OBU
RSU
Umkehrplatz
2x GPS Antennen ITS-G5 Antenne
Gemeinde OBU
Ext. GPS Modul
Zentralseitige Anbindung
Mobilfunk
V2X RSU C-ITS-Zentrale
25.03.2021
27Phase III: Integration ins Mobilitätssystem
• Wie kann ein automatisiertes
Shuttle in ein regionales
Mobilitätssystem eingebunden
werden?
25.03.2021
28Phase III: Einbindung in Mobilitätssysteme
• Entwicklung eines Modell zur Betriebskonzept + +
Digibus
1 Nutzungsmodell
Var. 1.0, BOKU
+
Anforderungen an
+
Leitzentrale
Begleitpersonal
+
2 Ausschnitt Akzeptanzmodell
Ermittlung von Digibus®
+ + Automatisier
Wartungshäufigkeit + Benötigte Fahrer - ungsgrad
Nachfrage und Wirtschaftlichkeit
Anschaffungskosten Benötigtes -
Digibus
Komplexität
Personal
Betriebskonzept
Bedienqualität Wartungskosten
Personalkosten
+
Model
•1 Qualitativ: Causal-Loop Diagramm
Energiekosten
+ + +
+
+ -
Betriebskosten Finanzierungs
Differenz gewünschte zu +
Digibusse + bedarf
+
tätsächlicher
•2 Quantitativ: Systemdynamisch Fahrgastpotential Fahrgastpotential
Maximale Fahrgäste
pro Digibus
-
Bedienhäufigkeit
-
-
+
Preis Ticket je
Fahrt
+
Auf Fahrgäste
umgelegte Kosten
+
-
Subventionen
+
Preis touristische
Zeitkarte
Potential
Digibus Active Users Lost Users
-
+
+ Durschnittliche
+
Maximale Länge
Fahrtroute
Notwendigkeit
spezieller Infrastruktur
Adopters Adoption Stop Using
Anzahl Fahrtroutenlänge +
Digibusse Preis Zeitkarte
Fahrgäste Digibus R
• Szenariensimulationen 3
Digibus Gesamt + +
Wahrscheinlickeit, - -
-
dass Buss voll ist +
Bedienhäufigkeit
+ Flexibilität der
Fahrtroute
User D
Einwohner (nach
Gruppen und Region) + Potentielle regelmäßige
Fahrgäste (nach Gruppen
+ + Wegerate
Ortskern +
+
-
R
und Region) -
+ wahrgenommene Kosten
• Basisszenario zur Abbildung des Probe-
+ Wegerate regelmäßige Fahrgäste je -
Wahrgenommene - reale
Wegerate überregional Fahrt Anteil Besitzer einer
Kosten Touristen maximale (oder Durchschnittsgeschwindigkeit
Touristen +
Potentielle
Tourismus
+ +
Zeitkarte
+ durchschnittliche?)
Wartezeit für Digibus
Digibus Adoption from Adoption from
touristische Fahrgäste
touristische
+
regelmäßige
+ Länge des Intervalls am
Wegezeit zum
Einstiegspunkt + - Marketing Word of Mouth Users with Negative
Realbetriebs
+ + Fahrzeit zu Umsteigeknoten zu Öff. +
Tagesgäste Fahrgäste Fahrgäste
+
+
+
+
touristischen Zielen - Fernverkehr
- Gesamt-Wegezeit zum
+ Experience with Shuttle
- - - Umsteigpunkt Fahrtzeit Digibus zu
Umsteigpunkt
Attraktivität für
Attraktivität für + Maximum
• Sensitivitätsanalysen
Fahrten zu +
+ touristischen Zielen - überregionale Fahrten -
Existierende ÖV
Nutzung
Bereitschaft,
Digibus-Angebot zu +
-
+ + - Distanz zum
Umsteigeknoten
Addressable Market Imitation
Gesamt-Wegezeit
Marketing von
nutzen (nach Gruppen)
Vorhandenheit Attraktivität
zum Ortskern Coefficient
+ Touristische Begleitung Alternative
• Betriebskonzepte
Digibus +
+ Verkehrsmittel
Fahrtzeit Digibus zu
+
- Ortskern Weight Ease of Technology Reliability of Shut
+
- -
Use Weight Usefulnes
Positive Mundpropaganda Attraktivität für
-
Acceptance Share Service
- Digibus Fahrten zum Ortskern +
Negative Media Verfügbarkeit von Einbindung in integrierte
Coverage
• Identifikation von kritischen
Ansprechpartnern Mobilitätsdienste -
+ +
+ + Distanz zum
- + im Ortskern
+
??? (Sicherheit, Sauberkeit,
Fahrweise, mit/ohne Operator ....) integrierter
Mobilitätsplattformen
Akzeptanz Verkehrsmittelwahl
Akzeptanz .
in ein regionales, intermodales
Mobilitätssystems 3
Positive Effekte bei on-Demand Einsatz durch
eine Verringerung der Wahrscheinlichkeit von
Wartezeiten durch Überfüllung erst bei hohem
Nachfragepotential
Höhere Geschwindigkeiten von Vorteil
29Phase III: Wirkungsanalyse verkehrlicher Aspekte
Simulationsmethode
Verkehrssimulation mittels Modellierung in der „Eclipse SUMO“
suite (Simulation of Urban MObility)
Zielsetzung
• Abschätzung der Einflüsse auf PKW Reisezeiten
Kalibrierung
• Openstreetmap (OSM, 2019), SAGISOnline-System (SAGIS,
2019), Verkehrsregulatorische Vorgaben, Verkehrsdaten
4 Szenarien
• Variation der Digibus® Stationen (Anzahl, Verortung)
• Veränderte Digibus® Linienführungen
Ergebnis
Verkehrsmessungen bestätigen Simulationen
Keine signifikanten Auswirkungen auf den übrigen Verkehr zu erwarten
Leichte Verzögerungen des PKW-Verkehrs entlang Linienführungen falls wenig Überholmöglichkeiten
Schnelleres Busfahrzeug von Vorteil
30Phase III: Integration in die MaaS-App wegfinder
1) Start-Ziel wählen 2) Anzeige Digibus im Routing (Übersicht und Detail- 3) Ticket-
und nach möglichen Ansichten) buchung
Verbindungen suchen ©ÖBB © ÖBB
Erfolgreiche Einbindung des Digibus in ein automatisiertes Mobilitätssystem
Digitale Abdeckung der gesamte Mobilitätskette
Realerprobung in Koppl (Anbindung an überregionale Buslinie,
Operatorenausbildung, Fahrgastbefragung)
31Phase III: Integration Echtzeit-Daten & Auslastungen
Echtzeit-Information Auslastungs- und Positionsanzeige
Integration des Digibus im FluidHub
Übertragung der Echtzeitdaten von Easymile mittels ID-Matching zur ÖBB
Verlinkung auf Website für Auslastungsanzeige
Anzeige der Echtzeitposition, Auslastung und Geschwindigkeit auf FluidGo-Website
32Phase IV: Betrieb / Interaktionskonzepte
• Welche Konzepte eignen sich
zur Kommunikation mit anderen
VerkehrsteilnehmerInnen bzw.
zur Interaktion mit Fahrgästen?
25.03.2021
33Phase IV: Evaluierung Außenkommunikation
Szenariengeneration…. … Konzept, Design, Laborerprobung…
B
A
…Realerprobung
25.03.2021
34Phase IV: Evaluierung Außenkommunikation
Icons
Countdowns LED-Leisten
25.03.2021
35Phase IV: Ergebnisse Außeninteraktion
• Bedarf an zusätzlicher Kommunikation und Information:
• Fußgänger (nicht motorisierter Verkehr):
• Problemfelder Zustieg, Querung mit bestehenden Bildzeichen, Countdowns adressierbar
• Hohes Lösungspotential
• Kfz (motorisierter Verkehr):
• Problemfeld Fahrinitiative mit Beschleunigungsindikatoren (Ampelmetapher+animiert)
adressierbar
• Moderates Lösungspotential
• „Weniger ist mehr“: so weit wie möglich bestehende Signale und Kommunikationsmetaphern verwenden
• Gewöhnungsphase an automatisiertes Fahrverhalten nicht durch Gewöhnungsphase an neue
Signalgebung ersetzen
• Signalinterferenzgefahr mit bestehenden Kommunikationsvorrichtungen
• Regulationsbedarf und systematische Einführung
25.03.2021
36Phase IV: Themen Fahrgastinteraktion
Anforderungen und Themenfelder
Informationen
Kapazitäts- über Fahrziel,
Ticketing
management Haltestellen und
Fahrplan
Störfall/
Haltewunsch
Sicherheit
25.03.2021
37Phase IV: Konzepte Fahrgastinteraktion
Digibus
38Phase IV: Evaluierung Fahrgastinteraktion
25.03.2021
39Phase IV: Ergebnisse Fahrgastinteraktion
• Bedarf an zusätzlicher Kommunikation und Information
• Barrierefreiheit muss auf allen Ebenen mitgedacht werden
• In Not- oder Ausnahmefällen ist menschliche Ansprechperson
bevorzugt, mit direkter Audio und Video Verbindung
• Integration von Shuttle in bestehende Systeme essenziell
• Chatbot für Informationsanfragen
• Kapazitätenmanagement: flexibel vs. planbar
• Erster vollständig fahrerloser Test außerhalb
EasyMile Testgelände durchgeführt
© Salzburg Research/wildbild
25.03.2021
40Phase V: Evaluierung
• Welche Potenziale existieren?
• Welche Erkenntnisse wurden
aus den Realerprobungen
gewonnen?
• Wie sieht ein Blick in die
Zukunft aus?
25.03.2021
41Phase IV: Potenziale automatisierter Shuttles
25.03.2021
42Phase IV: Potenziale automatisierter Shuttles
25.03.2021
43Phase IV: Potenziale automatisierter Shuttles
44Phase IV: Potenziale automatisierter Shuttles
45Phase IV: Gesamtergebnisse der Realerprobungen
2018 - 2021
1.423
2.895
1.423 2.895 1.290
durchgeführte Testfahrten beförderte Fahrgäste gefahrene Kilometer
25.03.2021
46Phase IV: Charakteristika der Teststrecken –
öffentliche Teststrecke
331 Fahrten
467 Fahrgäste
659 km
Koppl, Salzburg
47Phase IV: Charakteristika der Teststrecken –
öffentliche Teststrecke
969 Fahrten
2.2243
Fahrgäste
620 km
Wiener Neustadt, Niederösterreich
48Phase IV: Charakteristika der Teststrecken –
nicht-öffentliche Teststrecke
55 Fahrten
136 Fahrgäste
ÖAMTC Verkehrstechnikzentrum Teesdorf, Niederösterreich
49Phase IV: Charakteristika der Teststrecken –
nicht-öffentliche Teststrecke
68 Fahrten
49 Fahrgäste
10,5 km
Salzburgring, Koppl, Salzburg
50Phase IV: Charakteristika der Teststrecken –
privater Firmenparkplatz
20 Fahrten
29 Fahrgäste
4,6 km
Parkplatz von Commend International Salzburg
51Phase IV: Charakteristika der Teststrecken –
privater Firmenparkplatz
24 Fahrten
13 Fahrgäste
7,7 km
Postbusgarage, Salzburg 52Phase IV: Resümee – Forschungsfelder und -bedarf
Begleit-
forschung
Recht
Ethik
Wirt- Gesellschaft
schaftlichkeit
Vereinheit-
Technische Grundlagen- lichung
Robustheit forschung
Interaktion Verkehrsteilnehmerinnen
Standardi- Öffnung der
sierung Systeme
Risikobewertung
Schnittstellen Einbindung Mobilitätssystem
Fahr-
Standardi- Verläss-
zeug sierung lichkeit
Schnittstellen Digitale Infrastruktur
Technische Keine
Robustheit Anpassungen
Sensorik Physische InfrastrukturPhase IV: Resümee – Forschungsbedarf und Akteure
Fahrzeughersteller GEMEINSAM Öffentliche Verwaltung
Verkehrsunternehmen/verbünde
Begleit- Forschungseinrichtungen
forschung Wirtschaft
Recht
Ethik
Wirt- Gesellschaft
schaftlichkeit
Vereinheit-
Technische Grundlagen- lichung
Robustheit forschung
Interaktion Verkehrsteilnehmerinnen
Standardi- Öffnung der
sierung Systeme
Risikobewertung
Schnittstellen Einbindung Mobilitätssystem
Fahr-
Standardi- Verläss-
zeug sierung lichkeit
Schnittstellen Digitale Infrastruktur
Technische Keine
Robustheit Anpassungen
Sensorik Physische InfrastrukturPhase IV: Resümee – Vision und Status Quo
Salzburg- Vision
ring
4
F&E-Strategie ?
SAE-Level
3
Teesdorf
Postbus Wiener
Commend Neustadt Koppl
2
Komplexität der ODD
Leeres Privatgelände Öffentlicher StraßenverkehrPhase IV: Resümee – Der Weg zur Vision
Pfad der Implementierug
Schritt 1 Schritt 2 Schritt 3 Schritt 4 Vision
z.B. Leeres z.B. Park z.B. Fußgänger- z.B. Straßen- Straßen-
Privatgelände ohne zone mit wenig verkehr mit verkehr ohne
ohne KFZ- KFZ- Einschrän- Einschrän-
4
Verkehr Verkehr Verkehr kungen kungen
SAE-Level
ERTRAC
3
Roadmap
Stand der Forschung & Entwicklung
2 Stand der Technik
Komplexität der ODD
Leeres Privatgelände Öffentlicher StraßenverkehrExpert*innendiskussion
Anna Mayerthaler Michael Nikowitz Martin Russ Benno Nager Benedikt Sperling
Teamkoordinatorin Stabstelle Geschäftsführer AustriaTech Tech. Jurist Geschäftsführer
ÖBB 360 - Mobility&More IVS & digitale Transformation Mission Board GPL Innovationen Intelligente DACH & Osteuropa
Mobilität für die erste/letzte Meile BMK Climate-neutral & Transportsysteme EasyMile
Smart Cities ASTRA Schweiz
in Horizon Europe
25.03.2021
57Österreichisches Leitprojekt für automatisiertes
Fahren im öffentlichen Personennahverkehr.
Kontaktdaten
Dr. Karl Rehrl
Projektleiter
Salzburg Research Forschungsgesellschaft mbH
Jakob Haringer-Straße 5, 5020 Salzburg
E-Mail: karl.rehrl@salzburgresearch.at, Tel.: 0664/1440368
https://www.digibus.at | Twitter: @digibus_at | Facebook: digibus.at
Koordinator Partner
Assoziierte Partner FördergeberSie können auch lesen

















































