HYDROGRAPHISCHE NACHRICHTEN - www.dhyg.de
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
www.dhyg.de HN 95 • 30. Jahrgang • Juni 2013
HYDROGRAPHISCHE
NACHRICHTEN
Fachzeitschrift
Fachzeitschrift für
für Hydrographie
Hydrographie und
und Geoinformation
Geoinformation
Neue Reliefkarten der
deutschen Ostsee
Die Verbindung moderner
und klassischer Gewässer
vermessung – Airborne
Hydromapping und
Echolotvermessung
Blau ist die Hoffnung –
Potenziale maritimer
Geodateninfrastrukturen
»Vermessungsingenieure
streiten sich nicht« –
Ein Wissenschaftsgespräch
mit Gunther Braun
OpenSeaMap -
Wassertiefen per
Crowdsourcing
Vorwort — 06-2013 — HN 95
Liebe Leserinnen und Leser,
wenn etwas ein Mal passiert, ist es ein Unfall. Wenn Nicht nur die Literaturangaben redigieren wir; die
es ein zweites Mal geschieht, handelt es sich um gesamten Beiträge erscheinen nicht immer genau
einen Zufall. Erst wenn es auch ein drittes Mal ein- so wie im Manuskript eingereicht. Die Arbeit der
tritt, kann man von einem Muster sprechen. Redaktion besteht eben genau darin, die Texte et-
Die letzte Ausgabe der HN hatte 56 Seiten. Das was zu bearbeiten, sprachlich, stilistisch und wenn
habe ich im Vorwort als Besonderheit herausge- nötig auch inhaltlich. Damit alles auf eine Seite
stellt. Es handelte sich um einen Unfall, so kam es passt, müssen wir den Text zuweilen etwas kürzen,
uns vor, denn in der Redaktion planen wir immer eine Abbildung verkleinern, sie gar ganz weglas- 3
ein Heft mit etwa 40 Seiten. Nun hat diese Ausga- sen. Das ist eben der Unterschied zwischen einer
be schon wieder 56 Seiten. Ein Zufall? Ich will ger- seitenbasierten Fachzeitschrift und einer HTML-
ne daran glauben. Mal sehen, was uns im Oktober Publikation mit unbeschränktem Platzangebot.
erwartet. Der begrenzte Platz zwang uns, im Artikel über Lars Schiller
Bleiben wir bei dieser Ausgabe. Ganze fünf Fach- die OpenSeaMap einen Cartoon wegzulassen.
beiträge füllen die Seiten, allesamt von renom- Freilich hätten wir uns auch bei ausreichend Platz
mierten Wissenschaftlern verfasst, vom IOW, vom fragen müssen, ob es angemessen ist, einen wis-
GEOMAR, von der Uni Innsbruck, vom DGFI, vom senschaftlichen Beitrag mit einem Cartoon zu
BSH. Hinzu kommt noch das Wissenschaftsge- illustrieren. Nun will ich Ihnen den wahrlich ge-
spräch mit Gunther Braun. Ich glaube, mit Fug und lungenen Cartoon aber nicht vorenthalten (siehe
Recht behaupten zu können, dass dies die ›wis- unten). Er veranschaulicht die Problematik, dass es
senschaftlichste‹ HN-Ausgabe ist, die wir bislang immer noch kein einheitliches Seekartennull gibt.
für Sie zusammenstellen konnten. Ein Blick in die Ich will noch einmal auf den Umfang dieser Aus-
umfangreichen Literaturangaben der einzelnen gabe zu sprechen kommen. So erfreulich das ist,
Beiträge beweist das eindrücklich. bringen so viele Seiten natürlich doch auch etwas
Apropos Literaturangaben: Natürlich prüfen wir höhere Druckkosten mit sich. Das muss die DHyG
jede einzelne Angabe. Das müssen wir schon des- irgendwie gegenfinanzieren. Ich kann nur hoffen,
halb tun, um die unterschiedlichen Quellen nach dass die mittlerweile erreichte Qualität der Zeit-
demselben Muster auflisten zu können. Andern- schrift nicht nur die Autoren anspornt, weiterhin
falls wären die Literaturangaben eine Mischung Beiträge zu schreiben, sondern die gestiegene Ak-
aus Unfall und Zufall – ein Muster wäre jedenfalls zeptanz auch unseren Anzeigenkunden ein attrak-
nicht zu erkennen, zumindest nicht artikelüber- tives Werbeumfeld bietet.
greifend. Bei der Gelegenheit versuchen wir natür- Allen Autoren dieser Ausgabe und allen, die eine
lich auch, die Vornamen der Autoren in Erfahrung Werbung geschaltet haben, möchte ich herzlich
zu bringen. Wir halten die vollständige Namens- danken. Bitte helfen Sie auch zukünftig mit, ein
nennung für eine wichtige Information, die keines- Muster zu schaffen.
wegs geheimgehalten werden muss, auch wenn
sich ein anderer Trend abzeichnet, weil in interna- Ihr
tionalen Journalen oft nur das Initial verraten wird.
Cartoon: OpenSeaMap
Macht Probleme:
Immer noch kein einheitliches
Seekartennull!
Geodatenmanagement — 06-2013 — HN 95
OpenSeaMap – Wassertiefen per Crowdsourcing
Ein Beitrag von Wolfgang Bosch und Markus Bärlocher*
Seekarten brauchen Flachwassertiefen – auch OpenSeaMap – die freie Seekarte. Die
Wassertiefen sind zwar weltweit erfasst, aber in den meisten Ländern noch nicht
als OpenData verfügbar. Deshalb sollen die Küsten per Crowdsourcing vermessen
werden. Mit GPS und Echolot an Bord kann jeder mitmachen und Tiefendaten sam
meln. Crowdsourcing von Flachwassertiefen kann auch helfen, amtliche Vermessun
gen zu ergänzen. In vielen Ländern sind die Daten veraltet und ungenau. Kürzungen
von Ressourcen führen auch in europäischen Ländern zunehmend zu Problemen.
Dieser Artikel beschreibt
OpenSeaMap | Seekarte | Crowdsourcing | Open-Data | Tidenmodell | LAT die Erfassung von Was
sertiefen per Crowd
Flachwasserdaten Messschiffe mit hochpräziser Sonar-Messtechnik. sourcing, die Beschi
Von GEBCO wurden Tiefenwasserdaten an Open- Aber nicht alle Länder verfügen über die erforder- ckung der Rohdaten
SeaMap gespendet, die den Bereich von 200 bis lichen technischen und finanziellen Ressourcen. und die anschließende
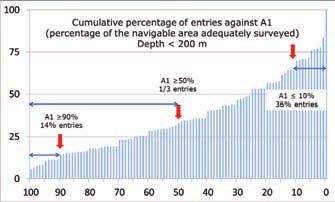
10 000 m abdecken. OpenSeaMap hat daraus Die Dokumentation C-55 der IHO zeigt die un- Berechnung des Gelän 23
ein Geländemodell gerechnet. Täler, Rücken und terschiedliche Leistungsfähigkeit der einzelnen demodells. Die berech
Festlandsockel mit ihren Abbrüchen und unter- Staaten (siehe Abb. 1). Beispielsweise geben nur neten Tiefendaten ste
schiedlichen Steigungen werden anschaulich in 12 Staaten an, ihre Küsten vollständig und aktuell hen dann allen frei und
24 Blaustufen dargestellt. Die Meerestopologie erfasst zu haben. Das BSH meldet für Deutsch- kostenlos zur Verfügung.
ist dadurch detailliert zu erkennen, was beispiels- land 98 % als erfasst. Bei 85 Staaten fehlen noch
weise im Geographie-Unterricht genutzt werden 30 % ihrer Küstengewässer. 53 Staaten haben ge-
kann. In höheren Zoomstufen werden zusätzlich rade mal 50 % erfasst. Und bei 45 Staaten fehlen
Tiefenlinien ab 200 m angezeigt, die 100-m-Linie ganze 90 %. Bei einigen Ländern sind die Daten
ist extrapoliert. Für den Segler und Wassersportler schon über 40 Jahre alt, erfasst mit den damals Autoren
sind jedoch die Wassertiefen unter 50 m entschei- vorhandenen ungenauen Technologien. Und es Dr. Wolfgang Bosch arbeitet
dend. Und diese sind in den GEBCO-Daten nicht gibt Küsten, die überhaupt noch nicht erfasst sind, beim Deutschen Geodätischen
enthalten. Flachwassertiefen werden zwar von beispielsweise Syrien, Eritrea, Malediven und viele Forschungsinstitut (DGFI) in
den Staaten weltweit erfasst, stehen aber leider Inseln und Kleinstaaten wie Bouvet Island oder München. Er ist Spezialist für
Gezeitenmodelle und arbeitet
meistens nicht frei zur Verfügung. Nauru. Hier kann Crowdsourcing helfen. an der Korrektur der Rohdaten
Doch auch die HOs industrialisierter Staaten sind
Open-Data zunehmend von Ressourcenkürzungen betroffen. Markus Bärlocher, Hochsee-
Open-Data will volkswirtschaftlich vorteilhafte Es mangelt an Geld, Personal, Ausrüstung und segler und Segellehrer, ist
Initiator von OpenSeaMap
Entwicklungen einleiten, indem Daten für jeder- Zeit. Dadurch kann die zeitnahe Aktualisierung der
mann frei zugänglich gemacht werden. Freie Wassertiefen auch bei uns kritisch werden. Kontakt unter:
Daten können unbürokratisch synergetisch ver- bosch@dgfi.badw.de
knüpft werden, und damit können innovative Pro- Crowdsourcing für Flachwassertiefen Project@OpenSeaMap.org
dukte und Dienste geschaffen werden. Crowdsourcing von Flachwassertiefen kann amtli-
In den USA ist Open-Data selbstverständlich: che Vermessungen entscheidend ergänzen. Denn * Mitarbeit von Jens Kübler
was der Bürger bezahlt hat, gehört dem Bürger. Crowdcourcing nutzt das Potenzial von Millionen und Martin Over
Das betrifft auch alle Geodaten, beispielsweise freiwilligen Datensammlern, die weltweit unter-
die Daten der NOAA. Diese sind weltweit frei ver- wegs sind. Ziel ist, den Minimum-Standard »Or-
fügbar. Die Open-Data-Kultur setzt sich auch in der 1« des IHO-Standards S-44 zu erfüllen. Das
anderen Ländern zunehmend durch. So hat bei- bedeutet eine horizontale Genauigkeit von 5 m
spielsweise das BSH beschlossen, die Wassertiefen und eine vertikale Genauigkeit von 0,5 m. Wegen
inklusive Flachwassertiefen der Nord- und Ostsee der beschränkten Möglichkeiten der verwendeten
in einem 50-m-Raster freizugeben. Auch Neusee- Consumer-Geräte, müssen Massendaten mit sta-
land und die Niederlande haben ihre Tiefendaten tistischen Methoden verbessert werden.
freigegeben. Und im Rahmen von INSPIRE werden
Abb. 1: Erfassungsgrad der
viele europäische Länder diesem Vorbild folgen. Wassertiefen (Quelle: IHB)
Knappe Ressourcen der HOs
»We know more about Mars and Moon than the
ocean’s floor« (Alberto Neves, IHB).
Die Hydrographischen Dienste (HO) der einzel-
nen Staaten erfassen die Wassertiefen und stellen
sich die bathymetrischen Daten gegenseitig zur
Verfügung, um Seekarten zu erzeugen. Erfasst wer-
den die Daten in regelmäßigen Abständen durch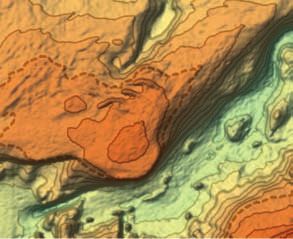
HN 95 — 06-2013 — Geodatenmanagement
Die Ergebnisse werden dabei umso genauer und nen RS-232-zu-USB-Wandler, für NMEA-2000 bzw.
zuverlässiger, je mehr die HOs die Datensammler Seatalk-NG über einen Seatalk-NMEA-Konverter.
unterstützen. Bei der Erfassung und vor allem bei Alternativ ist ein Hardware-Logger in Bau, der
der Auswertung der Daten können die erfahrenen ab August zum Selbstkostenpreis von ca. 40 €
Profis mit ihrem Expertenwissen helfen. Viel Un- erhältlich ist. Zwei Eingänge für NMEA-0183 bzw.
terstützung bekommt OpenSeaMap bereits vom Seatalk-1 empfangen die Daten Optokoppler-
BSH, und auch der Kontakt zu den Schwesterpro- getrennt von GPS und Echolot. Zur Erfassung von
jekten Argos und TeamSurv ist gut. Rollen und Stampfen ist zusätzlich ein Lage- und
Die gemeinsam gewonnenen Ergebnisse kön- Beschleunigungssensor eingebaut. Ein interner
nen zu allseitigem Nutzen zusammengefügt Taktgeber synchronisiert die Datenpakete der ver-
Jeder kann mitmachen
werden. Ziel könnte sein, mit Crowdcourcing den schiedenen Sensoren mit der Atomzeit des GPS.
Sind sie Sportbootfahrer weltweiten Erfassungsgrad der Wassertiefen we- Die Daten werden automatisch auf eine SD-Karte
oder arbeiten Sie in der sentlich zu verbessern. Schwächere Länder, die gespeichert.
Berufsschifffahrt? Fahren Sie sich keine eigene bathymetrische Vermessung Ein WLAN-Logger wurde als Selbstbau-Lösung
Motorboot oder segeln Sie? leisten können, könnten davon ganz besonders auf dem Hydrographentag in Papenburg vorge-
Veranstalten Sie Regatten
oder sind Sie Betreiber einer profitieren. stellt. Er erfüllt zwei Funktionen:
Charterflotte? Sind Sie Angler, 1. Navigationsdaten werden per WLAN übertra-
Taucher oder Seekajakfahrer? Die Ausrüstung gen und sind überall auf dem Schiff per Smartpho-
Sind Sie Reeder oder bauen Jedes Schiff hat ein GPS-Gerät und ein Echolot ne oder Tablet zu empfangen.
24 Sie Offshore-Windparks?
Dann machen Sie mit! an Bord und erfüllt damit die Voraussetzung, um 2. NMEA-Daten werden auf einem USB-Stick ge-
Auch als Fischer oder Kapitän mitmachen zu können. Die Positions- und Tiefen- speichert.
auf einem Ausflugsschiff, daten werden im NMEA-Format übertragen und Beide Aufgaben leistet ein TP-LINK, der für 35 €
mit Taxiboot, Schlepper müssen nur noch gespeichert werden. Dazu gibt über eBay erhältlich ist. Der Trick: dem TP-LINK
oder Hafenfahrzeug können
Sie beitragen. Auch Polizei, es verschiedene Möglichkeiten (siehe Abb. 2): wird eine speziell angepasste Firmware per USB-
DGzRS, DLRG, Wasserwacht • Kartenplotter, Stick zur Verfügung gestellt. (Die Anleitung dazu
und andere Behörden und • Software-Logger, gibts im Wiki von OpenSeaMap.)
Rettungsorganisationen • Hardware-Logger, Damit auch Reviere mit dem Schlauchboot ver-
laden wir ein – messen Sie
Wassertiefen! Und auch • WLAN-Logger. messen werden können, wird ein Vermessungs-
Universitäten sind herzlich rucksack zusammengestellt, der GPS, Echolot,
eingeladen, mitzuwirken! Kartenplotter von Raymarine und von Humminbird Logger, Stromversorgung und Befestigungsmate-
können die Position und die Wassertiefe von Haus rial enthält. Als mobile Messeinheit soll er an Segel-
Daten hochladen aus auf eine SD-Karte schreiben. Mit diesen Gerä- vereine, Tauchsportgruppen, Marinabetreiber etc.
http://depth.openseamap.org ten kann jeder sofort Daten erfassen. ausgeliehen werden.
Der kostenlose Software-Logger arbeitet wie ein
Seekartenplotter. In einem Splitscreen werden Metadaten
links die Navigationsdaten angezeigt (Kurs und Zur Korrektur und Verbesserung der rohen Messwer-
Geschwindigkeit, Windrichtung und -stärke, Was- te von GPS und Echolot werden zu jeder Messung
sertiefe, Position und Uhrzeit, GPS-Status). Rechts umfangreiche Metadaten mit etwa 50 Parametern
wird in einem großen Fenster die Seekarte mit ein- manuell erfasst. Gespeichert werden Daten über
Abb. 2: Rohdaten werden geblendeter Schiffsposition gezeigt, darunter sind • das Schiff als Messplattform,
von einem Logger in einem kleinen Fenster die NMEA-Datensätze • eingesetzte Messgeräte,
gesammelt, und zusammen
mit Metadaten auf den
sichtbar. Die gemessenen Daten werden konti- • verwendete Sensoren,
OpenSeaMap-Server nuierlich gespeichert. Angeschlossen wird das • die relative Position der Sensoren.
geladen Notebook für NMEA-0183 bzw. Seatalk-1 über ei-
Auch Messparameter wie z. B. der Öffnungswinkel,
Messdaten die Sendefrequenz und die Abtastmethode der
Kartenplotter Echolote werden erfasst.
Echolot
HW-Logger Daten hochladen
GPS NMEA-Bus
WLAN-Logger Die gesammelten Rohdaten werden vom Daten-
Lagesensor sammler als Datei zusammen mit den Metadaten
SW-Logger über die Messeinrichtung über eine Internetver-
+ Konverter
bindung auf den Server von OpenSeaMap hoch-
geladen. Derzeit können folgende Formate verar-
Metadaten Laptop Server beitet werden: NMEA-0183, NMEA-2000, Seatalk-1,
Spender Seatalk-NT, FSH (Raymarine), FSH (Humminbird),
CSV (Lowrence). Um das Hochladen zu beschleu-
Schiff Formular nigen, werden die Daten komprimiert.
Geräte
Wassertiefen berechnen
Sensoren
Um nun aus den Rohdaten Wassertiefen zu berech-
nen, müssen sie mit Tide und Welle beschickt wer-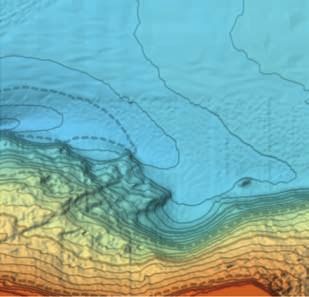
Geodatenmanagement — 06-2013 — HN 95
den. Weitere Einflussgrößen sind die Wasserschall- Shum et al. (1997) erwarten, dass Unterschiede
geschwindigkeit, Eigenbewegungen des Schiffes von etwa 2 cm auftreten. Im Küstenbereich kann
durch Krängung, Rollen und Stampfen sowie die sich der Tidenhub verschiedener Gezeitenmodel- Eine Auswahl brennender
Lage der Sensoren zueinander und zur Wasserlinie. le jedoch durchaus um 1–2 dm oder mehr unter- Forschungsfragen
scheiden. Bereits die unterschiedliche räumliche • Rohdaten und Metadaten
Tidenkorrektur Auflösung der Modelle beeinflusst die Verlässlich- stehen frei zur Verfügung, um
damit zu experimentieren. Für
Im Idealfall erfolgen die Echolotmessungen in der keit der Vorhersage des küstennahen Tidenhubs. die Beschickung der Rohdaten
unmittelbaren Nachbarschaft von Pegeln. Um do- Vielversprechend ist die jüngste Entwicklung von mit Welle, Tide und Salinität
minante Gezeitenkonstanten zu berechnen, sollte FES2012 (Carrère et al. 2012), ein globales, hydrody- können aktuelle Modelle
der Pegel ausreichend kontrolliert sein und min- namisch bestimmtes Gezeitenmodell mit einem verglichen, neue Methoden
entwickelt oder angewandte
destens ein Jahr lang registriert haben. Mit Hilfe Raster von nur 3,75 Bogenminuten. Methoden verfeinert werden.
der Gezeitenkonstanten lässt sich dann der aktu- Eine internationale Vergleichsstudie der globa- Unterstützung ist auch bei
elle Tidenhub unter günstigen Umständen recht len Gezeitenmodelle ist in Vorbereitung. Open- der Datenspeicherung und
gut berechnen. SeaMap wird die Ergebnisse dieser Studie heran- -verarbeitung und bei der
Automatisierung der Prozesse
Die Realität sieht leider anders aus. Pegel sind ziehen und das am besten geeignete Modell für gefragt. Ziel ist es, die Daten-
nicht in ausreichender Dichte verfügbar. Sie sind die Tidenkorrektur der Rohdaten verwenden. Zur auswertung und -korrektur zu
meistens in Häfen oder Flussmündungen installiert jeweiligen Messposition wird der relevante Teil des optimieren.
und ihre Registrierungen sind nicht zwangsläufig Modellrasters extrahiert (siehe Abb. 3). Dann wer- • Vergleichsstudien zwischen
professioneller Vermessung
repräsentativ für den offenen Ozean. Kontrollierte den die Gezeitenkonstanten auf die Messposition und Crowdsourcing sind 25
Messreihen von ausreichender Länge stehen auch interpoliert und der Tidenhub τ berechnet. geplant. Dabei können Consu-
nicht immer zu Verfügung oder sind der Öffent- In gleicher Weise kann auch der LAT-Tidenhub mer-Echolote mit hochpräzi-
lichkeit nicht zugänglich. τLAT berechnet werden. Da τLAT als Minimum des sen Sonarsystemen verglichen
werden, oder der eingesetzte
Stehen Gezeitenkonstanten von benachbarten Tidenhubs über 18,6 Jahre aber unabhängig von Low-Cost-Lagesensor mit prä-
Pegeln nicht zur Verfügung, muss auf Gezeiten- der aktuellen Beobachtungszeit ist, soll diese Be- zisen Lage-Messeinheiten.
modelle zurückgegriffen werden. Gezeitenmodel- rechnung einmal vorab erfolgen. Die Ergebnisse • Globale Gezeitenmodelle
le stellen die Gezeitenkonstanten für die wichtigs- können dann als globale Rasterwerte auf dem könnten auf Zuverlässigkeit
in Küstennähe untersucht
ten Partialtiden in einem bestimmten Gebiet zur OpenSeaMap-Server bereitgestellt werden. werden. Interessant wäre auch
Verfügung, in der Regel auf einem regelmäßigen die Kombination von globalen
Raster. Die Gezeitenkonstanten werden meistens Wellenkorrektur Modellen mit Küstenpegeln.
durch hydrodynamische Modellierung gewonnen Wellen, aber auch das Stampfen und Rollen des • Lagesensoren könnten
bezüglich ihrer Aussagefähig-
(die im Übrigen von zuverlässigen Flachwassertie- Schiffes beeinflussen die Echolotmessung. Diese keit zu Krängung, Rollen und
fen abhängen – ein Münchhausen-Problem!?). Sol- Störeffekte können – im Gegensatz zum Tidenhub Stampfen untersucht werden,
che Modellierungen werden auf unterschiedlichen – nur statistisch verarbeitet und müssen in geeig- und wie mit den Daten auf
Raumskalen durchgeführt, von regional bis global. neter Weise gefiltert werden. die Wellenhöhen und -längen
geschlossen werden kann.
Regionale Modelle passen sich der Küstenstruktur Als Standardverfahren für eine solche Aufgabe • Wellenmodelle könnten auf
besser an als globale Modelle und versprechen bietet sich das Kalman-Filter an. Das Kalman-Filter Anwendbarkeit zur Verbesse-
daher eine genauere Berechnung des Tidenhubs. ist ein Verfahren, das sich dynamisch den Messfeh- rung der Tiefenmessungen
Jedoch sind regionale Gezeitenmodelle selten öf- lern anpasst und damit einen optimalen Zustand geprüft werden.
• Methoden zur Beurteilung
fentlich zugänglich. Hier eröffnet sich ein weiteres des Messsystems in jedem Zeitschritt ermittelt. der Qualität der Rohdaten wä-
Feld für Crowdsourcing, die Sammlung und Auf- Ausgehend von der Modellierung des Wellen- ren hilfreich, um diese für die
bereitung regionaler Gezeitenmodelle. Dort, wo systems über die Modellierung der Messung und Auswertung zu wichten.
keine regionalen Gezeitenmodelle zur Verfügung deren erwarteten Varianzen kann der dynamische • Optimale Interpolations-
verfahren zur Ableitung von
stehen, ermöglichen globale Gezeitenmodelle Systemzustand optimal bezüglich minimaler Feh- Tiefenlinien aus regional un-
weltweit die Bestimmung von Wassertiefen. ler geschätzt werden. Dadurch kann das auftre- terschiedlich dicht verteilten
Die Tabelle führt einige globale, öffentlich ver- tende Sensorrauschen weitestgehend unterdrückt Messpunkten sollen gefunden
fügbare Gezeitenmodelle auf. Einige Modelle sind werden. Fehler, die außerhalb der Varianzen liegen, werden.
empirisch mit Hilfe der Satellitenaltimetrie (Mes- können mit dem Chi-Square-Test vorab eliminiert
sung von Höhe und Welligkeit der Meeresoberflä- werden, sodass der Filter konvergiert. Diese Eigen-
che per Radar) bestimmt worden und daher unab- schaften plus Erweiterungen, die auch nichtlineare
hängig von Kenntnissen der Bathymetrie. System- und Messmodelle betrachten, machen
Abb. 3: Raster im Gezeitenmo-
Modell Methode Auflösung Referenz
dell mit Schiffsposition (blaues
FES2004 hydrodynamisch 7,5' × 7,5' Lyard et al. (2006) Kreuz) und relevanten Raster-
punkten (rot) zur Berechnung
GOT4.7 empirisch 30' × 30' Ray, pers. Auskunft
der Gezeitenkonstanten an der
TPX07.2 hydrodynamisch 15' × 15' Egbert et al. (2010) Schiffsposition
EOT11a empirisch 7,5' × 7,5' Savcenko u. Bosch (2012)
DTU empirisch 7,5' × 7,5' Cheng u. Andersen (2012)
FES2012 hydrodynamisch 3,75' × 3,75' Carrère et al. (2012)
Im offenen Ozean unterscheiden sich die globalen
Gezeitenmodelle nur wenig. Hier kann man nach
HN 95 — 06-2013 — Geodatenmanagement
den Filter geeignet, um aufgezeichnete Positions- den relevanten Tiefen erfasst. Consumer-Echolote
und Tiefendaten zu prozessieren und Fehler der verfügen meist über einen Sensor für die Wasser-
Literatur
Aufzeichnung zu eliminieren. temperatur, können aber die anderen Parameter
Carrère, Loren; Florent Lyard; OpenSeaMap hat in einer ersten Implementie- nicht erfassen. Wenn Temperatur- und Salzgehalt-
Amandine Guillot; Mathilde rung zur Auswertung der Rohdaten eine einfache messungen nicht zur Verfügung stehen, muss mit
Cancet; Laurent Roblou Systemgleichung gewählt, die nur die Position, plausiblen Annahmen gerechnet werden und die
(2012): FES 2012: A new glo- Geschwindigkeit und Tiefe in jedem Filterschritt dabei verursachten Fehler müssen abgeschätzt
bal tidal model taking ad-
vantage of nearly 20 years aktualisiert. werden. Hilfreich wäre, wenn die Echolot-Herstel-
of altimetry measurements; Fossen u. Perez (2009) haben gezeigt, wie kom- ler die im Gerät verwendeten Algorithmen zur
Proceedings of meeting »20 plexere Systemmodelle für Kalman-Filter verwen- Korrektur der Laufzeiten oder wenigstens die rohe
Years of Altimetry«, OSTST, det werden können, die auch Wind, Welle und Zeit zur Verfügung stellten.
Venice, 22.–29.09.2012
Chen, Chen-Tung; Frank J. Mil- Schiffsmasse betrachten. Manche Schiffe führen
lero (1977): Speed of sound in zusätzlich zu Echolot und GPS weitere Sensoren Lagemessung
seawater at high pressures; mit, wie z. B. Gyroskop, Beschleunigungs- oder Krängung, Rollen und Stampfen des Schiffes ver-
Journal of the Acoustical Windmesser. Die Messmodelle können anhand ändern die Richtung des Messstrahls und damit
Society of America, Vol. 62,
No. 5, S. 1129–1135 der verfügbaren Sensoren variiert werden. Für op- die Position seines Fußpunktes. Deshalb ist im
Cheng, Yongcun; Ole Baltazar timale Ergebnisse und minimale Fehler werden bei OpenSeaMap-Hardware-Logger ein Lagesensor
Andersen (2010). Improve- der Auswertung System- und Messmodelle bereit- eingebaut. Der Chip MPU-6050 misst Lage und
ment of global ocean tide gestellt, die zu den auf dem Schiff verwendeten Beschleunigung in allen drei Achsen (siehe Abb. 4).
26 models in shallow water
regions; Poster, SV.1-68 45, Sensoren passen. Der Logger setzt die Lagedaten in das NMEA-
OSTST, Lisbon, 18.–22.10.2010 Datenformat um. Die Auflösung beträgt 16 Bit für
Del Grosso, V.A. (1974): New Wasserschallkorrektur alle sechs Werte. Die Lagewerte können in den
equation for the speed of Die in verschiedenen Tiefen unterschiedliche Bereichen ±250°/sec, ±500°/sec, ±1000°/sec und
sound in natural waters
(with comparisons to other Wasserschallgeschwindigkeit beeinflusst die Lauf- ±2000°/sec eingestellt werden.
equations); Journal of the zeit des Echolotsignals. Die Geschwindigkeit des Die Beschleunigung kann in den Bereichen
Acoustical Society of America, Schalls cw im Meerwasser hängt vor allem von der ±2 g, ±4 g, ±8 g und ±16 g gemessen werden.
Vol. 56, No. 4, S. 1084–1091 Wassertemperatur T, dem Salzgehalt S und dem Die Abtastrate ist frei wählbar zwischen 4 Hz und
Egbert, Gary (2010): TPXO7.2;
http://volkov.oce.orst.edu/ hydrostatischen Druck P ab. Um die Laufzeit Δt des 1 kHz. Da Schiffe eher träge reagieren, wurde der
tides/, Aufruf vom 17.06.2013 Echolotsignals in Tiefe D = ½∙Δt∙cw umzurechnen, kleinste Lage- und Beschleunigungsbereich ge-
Fossen, Thor I.; Tristan Perez muss die Schallgeschwindigkeit cw(T, S, P) berech- wählt, also ±250°/sec und ±2 g. Die Auflösung
(2009): Kalman filtering for net werden. Dazu dient z. B. der UNESCO-Algo- beträgt dann: 131 LSB/(º/s) und 16,384 LSB/g. Die
positioning and head-
ing control of ships and rithmus (Chen u. Millero 1977), ein Internationaler Hoffnung ist, damit Krängung, Rollen und Stamp-
offshore rigs; IEEE Control Standard, der von Wong u. Zhu (1995) an die In- fen gut erfassen zu können. Hub ist nur begrenzt
Systems Magazine, Vol. 29, ternationale Temperaturskala von 1990 angepasst erfassbar; Dünung kann selbst mit professionellen
No. 6, S. 32–46 wurde. Statt der UNESCO-Formel wird aber auch Lagesensoren nicht erfasst werden. Alle Schiffe,
…
die ebenfalls von Wong u. Zhu angepasste Glei- die den Hardware-Logger verwenden, liefern also
chung von Del Grosso (1974) verwendet. zusätzlich Lageinformation.
In der professionellen Seevermessung werden Das gilt natürlich auch für alle Schiffe mit einge-
Temperatur, Salzgehalt und Druck zur Bestimmung bautem Lagesensor, z. B. die Vermessungsschiffe
der Wasserschallgeschwindigkeit regelmäßig in des BSH oder andere Forschungsschiffe. Damit
Abb. 4: Lage- und
Beschleunigungssensor
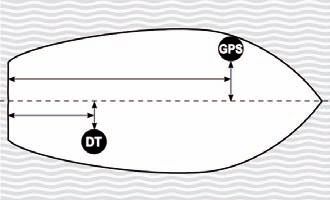
Abb. 5: Position von GPS-
Antenne und Echolotgeber
Abb. 6: Zusammenhänge der
Bezugssysteme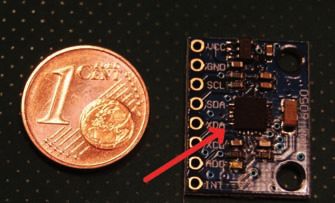
Geodatenmanagement — 06-2013 — HN 95
können sie hochwertige Referenzdaten für die Ak- ode von mindestens 18,6 Jahren unter mittleren
tion »Wassertiefen durch Crowdsourcing« liefern. meteorologischen Bedingungen einstellt. LAT ist
heute als Seekartennull von der IHO international
…
Sensorposition empfohlen und auch in ECDIS übernommen wor- Lyard, Florent; Fabien Lefevre;
Die horizontale Position der GPS-Antenne ist den. Alle Nordseeanrainer verwenden LAT. Thierry Letellier; Olivier
meist versetzt zur Position des Echolotgebers (sie- Allerdings haben sich weltweit nicht alle Län- Francis (2006): Modelling the
he Abb. 5). Auf kleinen Segelschiffen beträgt der der den IHO-Empfehlungen angeschlossen oder global ocean tides: a mo-
dern insight from FES2004;
Unterschied meist nur wenige Meter, auf einem diese umgesetzt. Beispielsweise verwenden Grie- Ocean Dynamics, Vol. 56, No.
Fischerboot können das jedoch mehrere Dutzend chenland und die USA Mean Lower Low Water 5–6, 394–415, S. 394–415
Meter sein. Die Position in Bezug auf die Längs- (MLLW). Japan verwendet ungefähr Lowest Low Ray, R. D. (1999): A global ocean
und Querachse wird in den Metadaten erfasst und Water (LLW). Erschwerend kommt hinzu, dass die tide model from TOPEX/
Poseidon altimetry: GOT4.7;
bei der Auswertung der Rohdaten mit der GPS- Abweichung des verwendeten Seekartennulls zu NASA Tech. Memorandum
Position verrechnet. LAT keine konstante Größe ist, sondern von Ort zu 209478, Goddard Space
Die Höhe der GPS-Antenne über dem Wasser- Ort unterschiedlich, selbst innerhalb eines Landes. Flight Center, Greenbelt, 58 S.
spiegel wird nicht erfasst, da die Höhendaten ei- Eine Aufstellung, in welchem Land welches See- Savcenko, Roman; Wolfgang
Bosch (2012): EOT11a –
nes Consumer-GPS zur Bestimmung des Wasser- kartennull gilt, konnte bisher nicht gefunden wer- Empirical Ocean Tide Model
spiegels viel zu ungenau sind. Der Offset, also der den. from Multimission Satellite
Abstand des Echolotgebers zur Wasserlinie, ist da- Altimetry; DGFI Report No.
gegen für die Datenauswertung wichtig. Tiefenlinien erzeugen 89, Deutsches Geodätisches
27
Forschungsinstitut (DGFI),
Prototypisch wurden bisher Tiefenmodelle für den München
Datenauswertung Brombachsee (im Fränkischen Seenland) und für Shum, C. K. et al. (1997): Accuracy
Um nun aus den Rohdaten Wassertiefen zu be- Teile des Streitköpflesees (in Baden-Württemberg) assessment of recent ocean
rechnen, sind erforderlich: die Echolotmessung, berechnet. Die nutzergenerierten Daten wurden tide models; Journal of Geo-
physical Research: Oceans,
der Bezug des Echolotgebers zur Wasserlinie des mit Quantum-GIS in ein Tiefenmodell umgeformt. Vol. 102, No. C11, S. 25173–25194
Schiffes und die Fähigkeit, den aktuellen Wasser- Dazu wurden zunächst aus den OpenStreetMap- Wong, George S.K.; Shi-ming
stand für die Messposition des Schiffes zu berech- Daten die Umrisse der Seen abgeleitet. Entlang der Zhu (1995): Speed of sound
nen. Abb. 6 skizziert eine vereinfachte Situation Uferlinie wurden Messpunkte mit dem Tiefenwert in seawater as a function of
salinity, temperature and
der Datenerfassung, aus der sich die notwendigen »0« generiert, und damit die äußere Grenze des pressure; Journal of the
Größen ableiten lassen: Modells definiert. Acoustical Society of America,
d Echolotmessung Mit dem Standard-Interpolationsverfahren (In- Vol. 97, No. 3, S. 1732–1736
D Wassertiefe relativ zum Seekartennull verse Distance Weighting, IDW) aus Q-GIS wurde
(hier LAT) aus dem Punktdatensatz ein Rasterbild mit Tiefen-
δEL2WL Offset zwischen Echolotgeber und angaben erzeugt. Anschließend wurden die Tie-
Wasserlinie fenlinien berechnet (siehe Abb. 7). Die Verteilung
τ aktueller Tidenhub und Dichte der Messpunkte war in beiden Fällen
τLAT Tidenhub für das Seekartennull nicht dazu geeignet, die Tiefenstrukturen hinrei-
chend zu repräsentieren. Dennoch konnte beim
Daraus folgt: Brombachsee eine Abweichung von einem RMS
D = d + δEL2WL – (τ – τLAT ) Error von unter ±1 m erzielt werden.
Die Erfassung der Tiefen per Crowdsourcing er-
Für die Berechnung wird vereinfachend angenom- folgt nicht systematisch, z. B. nach einem Raster,
men, dass die horizontale Bezugsebene der Echo- sondern zufällig und chaotisch. Deshalb müssen
lotmessung bekannt ist und die Echolotmessung Wege gefunden werden, mit der ungleichmäßi-
die Schallgeschwindigkeit des Meerwassers be- gen Verteilung der Messwerte umzugehen.
rücksichtigt. Außerdem wird angenommen, dass Als direktes Feedback werden de Tracks im Quali-
der Offset δEL2WL zwischen Echolotgeber und täts-Layer der Karte angezeigt. Auch die Punktmes-
Wasserlinie den Ladezustand des Schiffes berück- sungen und die vorläufig abgeleiteten Tiefenlinien
sichtigt, d. h. den Unterschied zwischen Konstruk- werden visualisiert. So ist die Dichte unmittelbar
tionswasserlinie und aktueller Wasserlinie. Weiter- sichtbar. Dritte können dann gezielt Lücken füllen.
hin wird der Squat-Effekt ignoriert, ein Einsinken Und der Nutzer erhält einen ersten Eindruck zur
des Schiffes, wenn es Fahrt aufgenommen hat. Qualität der Tiefenlinien in einem Revier.
Abb. 7: Messpunkte und
Normalisierung von LAT erzeugte Tiefenlinien
Wassertiefen in Seekarten müssen sich auf eine fest-
gelegte und klar definierte Höhenbezugsebene –
das Seekartennull (SKN) – beziehen. Früher hat man
das mittlere Springniedrigwasser (MspNW) genutzt.
In Gewässern mit geringem Tidenhub (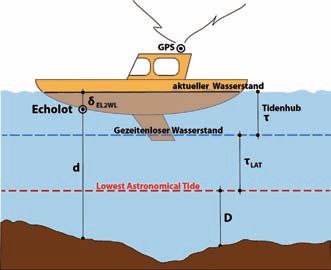
Sie können auch lesen