Remote Sensing IP Umweltbeobachtungen Versuch A - März 2018 - ETH Zürich
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
IP Umweltbeobachtungen
Versuch A
Remote Sensing
8. März 2018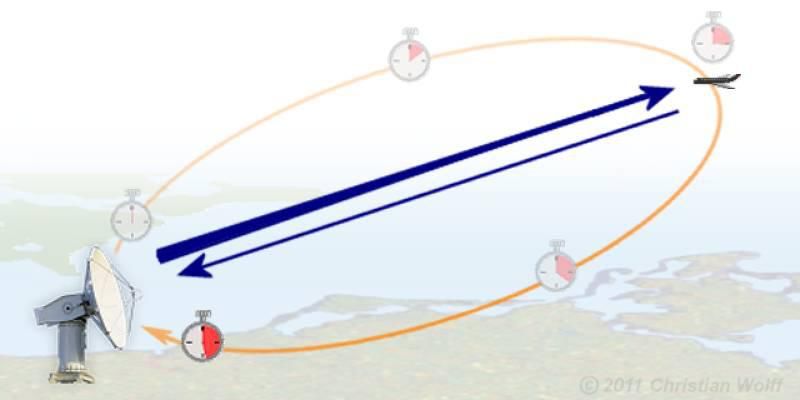
Inhaltsverzeichnis
1 Ziele 1
2 Fragen zur Vorbereitung aufs Kolloquium 1
3 Theorie 1
3.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
3.1.1 Elektromagnetische Strahlung . . . . . . . . . . . . . . . . . . . . 2
3.2 Satelliten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3.2.1 Satellitentypen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3.2.2 Satelliteninstrumente . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.3 Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.4 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.4.1 Drei grundlegende physikalische Gesetzmässigkeiten . . . . . . . . 5
3.5 Funktionsweise Radar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.5.1 Prinzip Radargerät . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.5.2 Informationen, die Radar liefert . . . . . . . . . . . . . . . . . . . 7
3.6 Radarbilder-Interpretation . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.6.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.6.2 Einfluss der Hangneigung . . . . . . . . . . . . . . . . . . . . . . 9
3.6.3 Einfluss der Rauhigkeit . . . . . . . . . . . . . . . . . . . . . . . . 9
3.6.4 Volumenstreuung . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.6.5 Doppelreflextion . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.6.6 Optik und Radar im Vergleich . . . . . . . . . . . . . . . . . . . . 11
4 Theorie für Aufgaben 12
4.0.1 Aufgabe 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.0.2 Aufgabe 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5 Aufgaben 14
5.1 Aufgabe 1: Kennenlernen von Satelliten- und Radarbildern . . . . . . . . 14
5.2 Aufgabe 2: Wetterphänomen über Island . . . . . . . . . . . . . . . . . . 14
5.3 Aufgabe 3: Zyklon Xynthia . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.4 Aufgabe 4: Bildinterpretation einer Radaraufnahme . . . . . . . . . . . . 17
6 Anhang 18
6.1 Berechnung geostrophischer Wind . . . . . . . . . . . . . . . . . . . . . . 18
6.2 Vertikalschnitt durch Feuchtigkeitsverteilung . . . . . . . . . . . . . . . . 19
6.3 Bestimmung der Höhe des Feuchtigkeitsgebietes . . . . . . . . . . . . . . 20
i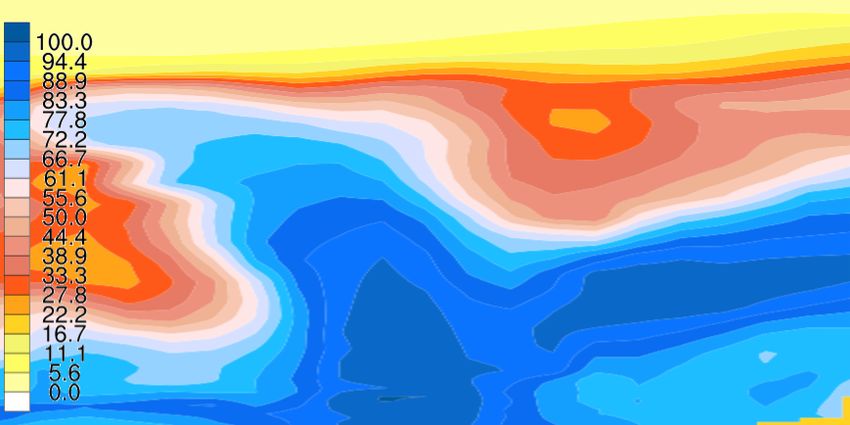
1 Ziele
• Überblick über das Fernerkundungs-Messnetz
• Informationen aus Satelliten- und Radarbilden lesen und Rückschlüsse ziehen
• Möglichkeiten und Grenzen der Fernerkundung
2 Fragen zur Vorbereitung aufs Kolloquium
• Erkläre kurz das Prinzip der Fernerkundung
• Welche Geräte werden zur Fernerkundung genutzt?
• Wie werden Remote Sensing - Daten verwendet?
3 Theorie
3.1 Einführung
Remote Sensing (deutsch: Fernerkundung) schliesst Lücken konventioneller Messsyste-
me. Das Anwendungsspektrum der Fernerkundung ist sehr breit und umfasst neben
der Meteorologie die Kartographie, die Landklassifikation, die Aufzeichnung von Um-
weltgefahren und Katastrophengebiete, dieÜberwachung des Meeres (z.B. Schiffe, Eis-
berge, Ölfelder nach Ölkatastrophen etc.) und vieles mehr. In der Meteorologie können
mit konventionellen Messsystemen, wie unter anderem Balloonsonden oder Messstatio-
nen, vorwiegend punktuelle Messungen von meteorologischen Grössen wie beispielsweise
Temperatur oder Luftdruck gemacht werden und die Auflösung kann dabei nicht belie-
big verkleinert werden. Ausserdem können konventionelle Messsysteme nicht flächende-
ckend aufgestellt werden, weil viele Regionen schlecht zugänglich sind. Als Alternative
verwendet man Interpolationen, welche jedoch stets mit Unsicherheiten behaftet sind.
Fernerkundung kann die konventionellen Messsysteme zwar nicht ersetzen, aber sinnvoll
mit zusätzlichen Informationen über die Atmosphäre ergänzen. Besonders geeignet ist
Fernerkundung, um einen Überblick über grossräumige Wetterverhältnisse zu verschaf-
fen.
Durch Remote Sensig lassen sich Daten über einen Zustand oder ein Messobjekt aus der
Ferne ("remote- entfernt) gewinnen ohne direkten Kontakt zu haben. Die Informationen
werden fast immer über elektromagnetische Strahlung gewonnen. Je nach untersuchtem
Phänomen (Vegetationsdecke, Temperatur, Ozon, etc.) wird Strahlung anderer Wellen-
länge verwendet. Mit sichtbarem Licht erhält man visuelle Bilder (analog Photographie).
Infratrotbilder liefern Informationen über die Temperatur der Erdoberfläche oder von
Wolken. Hiermit hängt eine Schwierigkeit der Fernerkundung zusammen: Oft wird nicht
die physikalisch (meteorologische) Grösse an sich gemessen, sondern die Amplitude (In-
tensität), das Spektrum oder die Phase der elektromagnetischen Strahlung. Um aus
1
diesen Daten Werte zur Temperatur oder Niederschlagsmenge zu erhalten, müssen oft
komplizierte und approximative Verfahren angewendet werden. Ausserdem können gar
nicht alle meteorologischen Grössen aus der elektromagnetischen Strahlung berechnet
werden.
Remote Sensing lässt sich unterteilen in aktive und passive Systeme. Aktive Systeme
(Radar, Lidar) senden selber Strahlung aus und messen, wie viel dieser Strahlung vom
untersuchten Objekt zurückgestreut wird. Passive Systeme (Satelliten) dagegen senden
keine Strahlung aus: Sie messen nur die Strahlung, welche vom beobachteten Objekt
emittiert (Wärmestrahlung) oder reflektiert wird. Die Sonne oder das Objekt selbst
(Radiometer) dient dabei als Lichtquelle.
3.1.1 Elektromagnetische Strahlung
Da es sich bei der von Radargeräten verwendeten Strahlung immer um elektromagneti-
sche Strahlung handelt, ist es als erstes wichtig zu wissen, was darunter verstanden wird.
Elektromagnetische Strahlung besteht aus gekoppelten elektrischen und magnetischen
Feldern. Die elektromagnetischen Wellen pflanzen sich im Vakuum mit Lichtgeschwindig-
keit fort, in Materie ist die Lichtgeschwindigkeit vermindert. Elektromagnetische Wellen
sind im elektromagnetischen Spektrum eingeteilt in Radiowellen, Mikrowellen, Infrarot-
Strahlung (IR), Ultraviolett-Strahlung (UV) u.s.w. Einen Überblick über das elektro-
magnetische Spektrum ist auf Abbildung 1 zu finden.
Abbildung 1: Elektromagnetisches Spektrum (Quelle: http://www.teialehrbuch.de/
Kostenlose-Kurse/Markup-Sprachen/16367-Elektromagnetische-Wellen-und-Licht.html)
2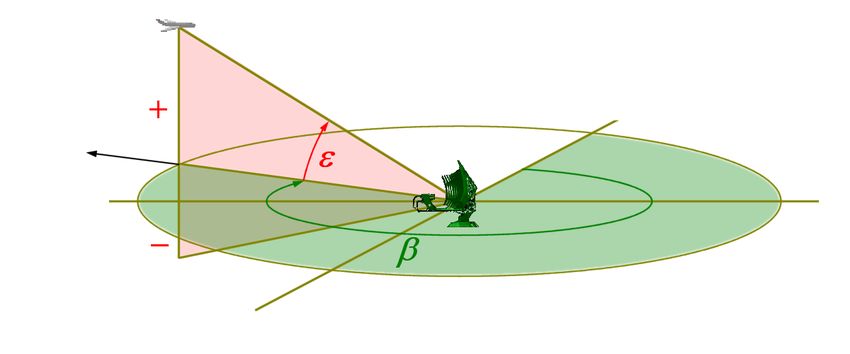
3.2 Satelliten
Im Gegensatz zum Mond, der ein natürlicher Satellit ist, sind die vom Menschen gebaute
Raumflugkörper künstliche Satelliten. Sie werden für viele Anwendungen in der Wissen-
schaft (Umweltnaturwissenschaften, Geowissenschaften) oder in der Technik eingesetzt.
Beispielsweise gibt es Satelliten für die Erfassung geologischer Daten oder für die Vegeta-
tionsbestimmung. In diesem Versuch beschränken wir uns jedoch auf die Anwendung von
Satelliten zur Gewinnung von Daten über die Atmosphäre. Die vom Satelliteninstrument
gemessenen Strahlungsintensitäten werden in der Regel nicht direkt verwendet, sondern
müssen aufwändig weiter verarbeitet werden. Beispielsweise müssen mittels Bildverar-
beitung Verzerrungen korrigiert werden.
3.2.1 Satellitentypen
Damit ein Satellit auf einer stabilen Umlaufbahn um die Erde kreisen kann, muss die
auf den Satelliten wirkende Erdanziehungskraft durch die aus der Kreisbewegung um die
Erde hervorgerufene Zentrifugalkraft genau kompensiert werden. Somit erfordern nied-
rige Umlaufbahnen, auf welchen die Erdanziehungskraft stärker wirkt, höhere Bahnge-
schwindigkeiten. Satelliten müssen sich mindestens in einer Höhe von 200km befinden,
weil sonst die bremsende Wirkung der Erdatmosphäre zu stark ist. Im Allgemeinen
unterscheidet man zwischen geostationären und nicht geostationären Satelliten.
Geostationäre Satelliten: Der geostationäre Satellit befindet sich stets über demselben
Punkt der Erde, was nur möglich ist bei einer Umlaufzeit von genau 24 Stun-
den. Die Richtung des Umlaufkurses und die Dauer einer Erdumrundung sind mit
der Richtung der Erddrehung und ihrer Dauer identisch. Von der Erde aus gesehen
scheint der Satellit still zu stehen (stationär), obwohl er sich in Richtung der Erdro-
tation bewegt. So ist eine kontinuierliche Beobachtung derselben Gebiete (ca. ein
Drittel der Erdoberfläche) und stetiger Kontakt mit den Bodenstationen möglich.
Bilder von derselben Bodenfläche werden in kurzen Zeitintervallen aufgenommen,
was sinnvoll für die Wetterbeobachtung ist. Ein Beispiel für einen geostationären
Satelliten ist Meteosat mit seinem Hauptinstrument SEVIRI: Er befindet sich in
36’000km Höhe über dem Äquator auf 0° geografischer Länge und nimmt alle 15min
ein Bild auf.
Nicht geostationäre Satelliten: Zu den nicht geostationären Satelliten zählen jene Sa-
telliten mit Umlaufbahnen mit allen möglichen Geschwindigkeiten und Winkeln
ihrer Bahnebene zur Äquatorebene. Die häufigste nicht geostationäre Satelliten-
umlaufbahn ist die polare. Polare Satelliten überfliegen beide Pole. Sie sind somit
stark geneigt gegenüber der Äquatorebene und befinden sich in geringerer Höhe
über der Erde als geostationäre (meist unter 1000km). Während des Fluges von
Pol zu Pol dreht sich die Erde unter dem Satelliten weg, es werden stets nur Strei-
fen der Erdoberfläche beobachtet. Diese Streifen haben, je nach verwendeter Optik,
Breiten von 30 bis 2.600 km. Für die globale Erdbeobachtung müssen die einzelnen
3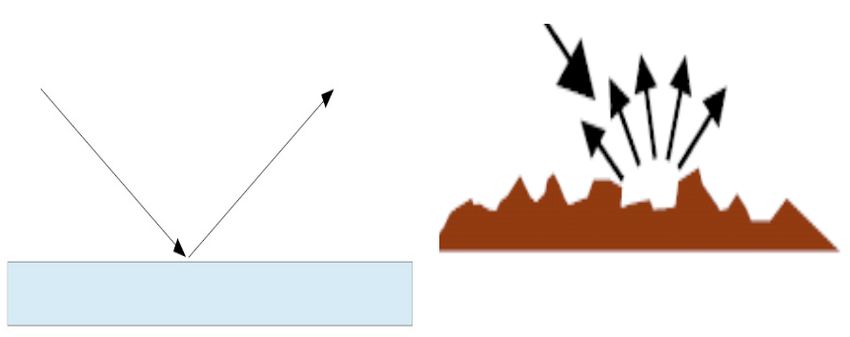
Beobachtungsstreifen aneinandergefügt werden. Beispiele für Satelliten mit pola-
rem Orbit sind die NASA Satelliten Aqua und Terra mit dem Instrument MODIS,
welches sich in 705km Höhe befindet und die Erde ca. 15 Mal pro Tag umkreist.
3.2.2 Satelliteninstrumente
Satelliten sind selbst nur die Träger für die eigentlichen Instrumente, von denen oft
mehrere an Bord des Satelliten installiert sind. So ist das Instrument MODIS auf den
Satelliten Terra und Aqua installiert. Die Leistung einzelner Instrumente ist durch den
aktuellen Stand der Technik, durch finanzielle Mittel aber auch durch physikalische Ge-
setzmässigkeiten limitiert. Die wichtigen Grössen, die die Leistungsfähigkeit eines Instru-
mentes charakterisieren sind die geometrische (örtliche) Auflösung, die zeitliche Auflö-
sung, die spektrale Auflösung und die radiometrische Auflösung, mit der ein bestimmter
Punkt auf der Erdoberfläche oder in der Atmosphäre gemessen werden kann. Diese ver-
schiedenen Auflösungen hängen voneinander ab und bedingen einander. Es muss also
für eine bestimmte Anwendung immer ein Kompromiss gefunden werden.
Die geometrische Auflösung beschreibt, wie gross ein Punkt (Pixel) auf der Erdoberflä-
che ist, für den ein bestimmter Messwert ermittelt werden kann. Sie hängt vom Betrach-
tungswinkel und der Umlaufbahn des Satelliten ab. Bei einer hohen Auflösung kann nur
ein kleiner Teil der Erdoberfläche abgebildet werden und umgekehrt. Die zeitliche Auf-
lösung bestimmt, wie viel Zeit zwischen zwei aufeinanderfolgenden Messungen desselben
Punktes vergeht. Sie hängt von der Umlaufbahn des Satelliten ab. Die spektrale Auf-
lösung gibt an, wie breit der Wellenlängenbereich eines bestimmten Kanals des Sensors
ist. Ein breites Frequenzband bedeutet eine niedrige spektrale Auflösung. Damit wird
in meteorologischen Anwendungen gearbeitet. Die radiometrische Auflösung beschreibt,
wie empfindlich der Sensor Unterschiede in der Strahlung messen kann. Sie entspricht
z.B. der Anzahl Graustufen eines Bildes.
3.3 Radar
Radar steht für "Radio Detecting and Ranging". Dieser Begriff bezeichnet elektronische
Geräte, welche mittels Reflexionen von elektromagnetischen Wellen (meist Mikrowellen)
an Objekten diese analysieren und z.B. Abstand (=range). Radargeräte zählen zu den
aktiven Fernerkundungssystemen, weil sie aktiv Strahlung aussenden. Sie sind deshalb
nicht auf die Sonne als Beleuchtungsquelle angewiesen. Mikrowellen breiten sich unab-
hängig von Dunkelheit aus und können Nebel oder Wolken fast ungehindert durchdrin-
gen, daher kann ein Radargerät die Position von Flugzeugen, Schiffen oder Hindernissen
auch dann bestimmen, wenn diese Objekte aufgrund schlechtem Wetter oder Dunkelheit
mit optischen Methoden nicht sichtbar sind.
4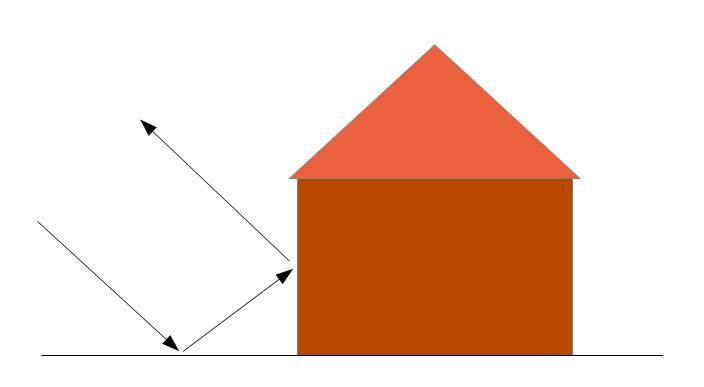
Radar wird in vielen Bereichen angewendet. Für verschiedene Einsatzzwecke wurden
unterschiedliche Radargeräte entwickelt. Einige Beispiele dazu sind:
• Rundsichtradar: Zur Überwachung von Schiffs- und Flugverkehr
• Wetterradar: Ortung Niederschlag
• Radar-Bewegungsmelder: Zur Überwachung von Gebäuden und Gelände
• Radargeräte zur Messung der Geschwindigkeit im Strassenverkehr
Radar in der Schweiz
Die MeteoSchweiz betreibt momentan ein Netz von 4 Radaranlagen. Die Radar-Stationen
befinden sich:
• Auf dem Albis bei Zürich
• In La Dole bei Genf
• Auf dem Monte Lema im Tessin
• Auf der Pointe de la Plaine Morte im Wallis
Die 3 Wetterradaranlagen in Zürich, Genf und im Tessin sind nun bereits seit über 20
Jahren im Einsatz. Im August 2012 wurde das Projekt Rad4alp gestartet. Dabei wur-
den die bestehenden Anlagen erneuert sowie das Radarmessnetz um zwei Radaranlagen
erweitert. Diese zwei neuen Anlagen sind, wie der Projektname bereits vermuten lässt,
in den Alpen. Eine davon im Wallis, die andere im Graubünden. Im November erfolgte
die Inbetriebnahme der Anlage im Wallis. Der zweite neue und insgesamt fünfte Wet-
terradar in Graubünden auf dem Weissfluhgipfel befindet sich seit Mai 2014 in Bau
(voraussichtlich bis Ende 2016)
3.4 Grundlagen
3.4.1 Drei grundlegende physikalische Gesetzmässigkeiten
Das Arbeitsprinzip der Radargeräte ist einfach zu verstehen, obwohl die theoretischen
Grundlagen recht komplex sind. Einige Naturgesetze haben dabei eine besonders gros-
se Bedeutung, denn für die Arbeit eines jeden Radargerätes wirken drei grundlegende
physikalische Gesetzmässigkeiten:
a) Die Reflexion oder Streuung (=diffuse/ungerichtete Reflexion) elektromagnetischer
Wellen. Treffen diese Wellen auf einen glatten Körper so werden sie reflektiert (Ein-
fallswinkel = Ausfallswinkel), treffen sie auf einen rauhen Körper so werden sie ge-
streut (einfallende Strahlung wird in alle Richtungen gestreut).
b) Die konstante Ausbreitungsgeschwindigkeit der elektromagnetischen Wellen. Die elek-
tromagnetischen Wellen breiten sich mit annähernder Lichtgeschwindigkeit c0 aus.
c0 = 3 ∗ 108 m/s (1)
5c) Die geradlinige Ausbreitung der elektromagnetischen Wellen. Bei der Ausbreitung
der elektromagnetischen Wellen im Frequenzbereich der Radargeräte geht man von
einer geradlinigen Ausbreitung aus. Durch die konsequente Nutzung aller drei Gesetz-
mässigkeiten kann man (bei stark fokussierten Strahlen) mit Hilfe eines Radargerätes
die Entfernung, Richtung und Höhe eines Zieles feststellen.
3.5 Funktionsweise Radar
3.5.1 Prinzip Radargerät
Abbildung 2 zeigt stark vereinfacht das Prinzip eines Radargerätes. Das Radargerät
strahlt mit einem Mikrowellenimpuls das Flugzeug an, der dann dort reflektiert wird
und mit dem Radargerät wieder empfangen wird. Der reflektierte Impuls, der durch die
Antenne empfangen wird, wird Echosignal genannt. Der Mikrowellenimpuls wird durch
einen leistungsfähigen Sender erzeugt und mit einem hochempfindlichen Empfänger wie-
der empfangen. Die Reflexion an den Flugzeugen geschieht diffus (diffuse Reflexion =
Streuung), das heist, es wird in viele verschiedene Richtungen gestreut. Das in Richtung
des Radargerätes reflektierte Echosignal wird oft mit dem englischen Begriff Backscatter
(=Rückstreuung) bezeichnet. Jedes Radargerät sendet also Strahlung aus, welche dann
Abbildung 2: Radarprinzip (Quelle: http://transistorgrab.de/en/category/radar/)
an Objekten reflektiert/zurückgestreut wird. Je kleiner ein Objekt, desto kleinere Wellen
sind notwendig um es zu detektieren.
63.5.2 Informationen, die Radar liefert
Mittels Radar können Informationen bezüglich Entfernung, Richtung und oft auch Hö-
he, Kurs und Geschwindigkeit von (weit entfernten) Objekten gewonnen werden. Die
Position des Objektes kann bereits mit den Werten der Entfernung und der Richtung
eindeutig ermittelt werden.
Entfernung:
Erfolgt am Ursprungsort ab Beginn der Aussendung eines hochfrequenten Impulses eine
Laufzeitmessung (Zeitmessung bis zum Eintreffen der Reflexion), so lässt sich mit der
bekannten Ausbreitungsgeschwindigkeit (c0 ) der Abstand zwischen Ursprungsort und
Hindernis errechnen. Dieses Prinzip ist auf Abbildung 3 dargestellt. Da bei der Lauf-
zeitmessung der Hin- und Rückweg der sich ausbreitenden elektromagnetischen Welle
berücksichtigt werden muss, ergibt sich für die Entfernung folgende einfache Gleichung:
R = c0 ∗ t/2 mit t = gemessene Laufzeit [s], R = Entfernung Antenne - Flugziel [m], c0
= Lichtgeschwindigkeit.
Abbildung 3: Entfernungsbestimmung (Quelle: http://www.radartutorial.eu)
Richtung:
Eine Bestimmung des Seitenwinkels des Objektes (=Azimuth) ist durch die Bündelung
der gesendeten Strahlung (= Bildung fokussierter Strahl) durch die Antenne möglich. Die
Winkelmessung wird dadurch möglich, dass die Antenne genau in die Richtung zeigen
muss, aus der sie das Echosignal empfängt. Dieser Winkel kann als Seitenwinkel am An-
tennendrehtisch gemessen werden. Radarantennen drehen sich im Regelfall horizontal,
um die Radarerfassung auf eine grose Fläche auszudehnen. Dieser Drehbewegung werden
Winkelwerte von 0◦ bis 360◦ zugeordnet. Die Bezugsrichtung ist geografisch Nord und
7wird mit einem Seitenwinkel von 0◦ definiert. Die Erhöhung des Seitenwinkels erfolgt im
Uhrzeigersinn (Drehrichtung einer rundumsuchenden Antenne). Die volle Umdrehung
entspricht einem Winkel von 360◦ . Auf Abbildung 4 wird dies veranschaulicht. Neueste
Radargeräte verzichten teilweise oder völlig auf eine mechanische Bewegung und steuern
die Richtung des Strahls durch sogenannte Phased-Array-Antennen.
Abbildung 4: Seitenwinkelbestimmung (Quelle: http://www.radartutorial.eu)
Höhe:
Der Höhenwinkel (Elevation) ist im Gegensatz zum Seitenwinkel ein vertikaler Winkel.
Die Bezugsrichtung, 0◦ Höhenwinkel, ist eine horizontale Linie in Ausbreitungsrichtung,
beginnend an der Antenne. Der Höhenwinkel wird über dem Horizont (0◦ Höhenwinkel)
positiv gezählt, unter dem Horizont negativ. In Abbildung 5 wird der Höhenwinkel mit
dem griechischen Buchstaben (Epsilon) und der Seitenwinkel mit β bezeichnet.
Abbildung 5: Definition des Höhenwinkels. = Höhenwinkel und β = Seitenwinkel (Quelle:
http://www.radartutorial.eu)
Kurs und Geschwindigkeit:
Die Ermittlung des Kurses eines Objekts (z.B. Flugzeug) und dessen Geschwindigkeit
erfolgt durch mehrmaliges, kurz aufeinanderfolgendes Aufnehmen der Position des Ob-
jekts.
83.6 Radarbilder-Interpretation
3.6.1 Einleitung
Es gibt zwei Methoden um aus Radarreflexion Bilder zu erzeugen: side-looking (mit
synthetical aperture radar, SAR) und beam-steering with real-aperture radar (ein scharf
gebündelter Strahl scannt einen Bereich ab). Im Folgenden beschränken uns auf side-
looking Radar und befassen uns mit Radarbildern der Erdbeobachtung. Die Plattform
(Flugzeug/Satellit) fliegt einen geraden Kurs in einer festen Höhe. Das Radar strahlt im
rechten Winkel zum Kurs schräg zur Erdoberfläche und beleuchtet einen breiten Streifen
auf ihr.
Die Graustufen eines Radarbildes hängen von der Energie der elektromagnetischen Wel-
len ab, die von den Landschaftselementen (Gebäude, Wasser, Wald etc.) zurückgestreut
werden. Mit diesem Wissen muss ein Radarbild betrachtet und interpretiert werden. Die
Intensität des zurückgestreuten Signals hängt im Wesentlichen von zwei Eigenschaften
der Landschaftsoberfläche ab:
• Form des Geländes (Hangneigung etc.)
• Rauhigkeit (Beschaffenheit)
3.6.2 Einfluss der Hangneigung
Den ausgesandten Radarwellen zugewandte Hangneigungen reflektieren direkt zurück,
wodurch die rückgestreute Strahlungsintensität höher ist und die Stelle hell dargestellt
wird. Abgewandte Flächen werden hingegen von den Wellen nicht erreicht und erschei-
nen auf dem Radarbild gar nicht. Dieses Phänomen nennt man Radarschatten. Es lässt
die zugewandte Seite zusammengeklappt erscheinen, wodurch das Bild "verzerrt"wird.
Der Grund ist das range-sampling, d.h. was den selben Abstand hat, erscheint im sel-
ben Pixel (Vergleich Optik: Was unter dem selben Winkel erscheint (hintereinander ist),
erscheint im selben Pixel). Je mehr ein Hang im rechten Winkel zur einfallenden Strah-
lung steht, desto stärker ist das zurückgestreute Signal und umso heller wird die Fläche
auf dem Radarbild. Dargestellt ist der Einfluss der Hangneigung auf das Radarsignal in
Abbildung 6.
3.6.3 Einfluss der Rauhigkeit
Auch die unterschiedliche Beschaffenheit einer Landschaft ist entscheidend für die Dar-
stellung auf dem Radarbild. Ist ein Gelände eher glatt, wird mehr schräg einfallende
Strahlung gespiegelt und gelangt nicht mehr zurück zum Radarempfänger (siehe Abbil-
dung 7 links). Dies lässt das Echo schwächer werden. Ein See beispielsweise spiegelt fast
die gesamte schräg einfallende Strahlung weg vom Empfänger, weshalb Seeoberflächen
fast schwarz erscheinen. Eine raue Oberfläche (zum Beispiel Wald) hingegen, streut die
reflektierte Strahlung in verschiedene Richtungen, wobei der grössere Teil davon wieder
zurück zum Radarempfänger gelangt (siehe Abbildung 7 rechts). Dieses Echo ist somit
stärker.
9Abbildung 6: Unterschiedliche Hangneigungen erbringen unterschiedliche Helligkeiten auf
dem Radarbild. Abgewandte Hänge (rechts) werden als Radarschatten dargestellt.
Abbildung 7: Links: Glatte Oberfläche spiegelt die schräg einfallende Strahlung.
Rechts: Raue Oberfläche streut die reflektierte Strahlung.
Ein Objekt ist rau, wenn Strukturen so gross oder grösser als die Wellenlänge sind.
So ist beispielsweise ebener Sand glatt, da Sandkorn < Wellenlänge. Ein Wald hingegen
ist rau, da Baum > Wellenlänge.
3.6.4 Volumenstreuung
Dringt Licht in einen (teilweise) lichtdurchlässigen Körper ein (z.B. Seifenschaum, Schnee),
wird das eintreffende Licht nicht nur an der Oberfläche, sondern auch in der Materie an
Inhomogenitäten reflektiert. Dies nennt man Volumenstreuung, auf Abbildung 8 ist eine
Darstellung dazu zu finden.
10Abbildung 8: Volumenstreuung führt zu einer Reflexion an sowie innerhalb der Materie.
3.6.5 Doppelreflextion
Das Phänomen der Doppelreflexion führt zu einer sehr starken Rückstreuung (Vergleich
Optik: "Katzenaugen"). Verursacht wird dieser Effekt bei Mikrowellen beispielsweise
durch Gebäude, wie auf Abbildung 9 dargestellt. Auf dem Radarbild ist dies dann als
sehr helle Stelle erkennbar.
Abbildung 9: Doppelreflexion hat eine sehr starke Rückstreuung zur Folge, dies wirkt sich
auf dem Radarbild aus.
3.6.6 Optik und Radar im Vergleich
Ein optischer Sensor hat eine Winkelauflösung: Pixel pro (Raum)Winkel. Zwei Punkte,
die vom Betrachter aus weniger als ein Minimalwinkel auseinanderliegen, können nicht
mehr aufgelöst werden. Ein Radar hat eine Abstandsauflösung: Pixel pro Abstand: Zwei
Punkte, die vom Betrachter aus weniger als ein Minimalabstand auseinanderliegen, kön-
nen nicht mehr aufgelöst werden. Dies bewirkt beispielsweise bei der Betrachtung eines
11Berges unterschiedliche Darstellungen. Optisch sieht man die einem zugewandte Seite
des Berges gut, und die abgewandte Seite eher weniger gut. Mit Radar hingegen sieht
man die einem zugewandte Seite des Berges schlecht, und die abgewandte Seite sehr gut.
Für beide Methoden aber gilt: was im ’Schatten’ liegt, sprich Punkte welche sich nicht
direkt mit dem Sensor verbinden lassen, sind nicht sichtbar. (Hinter einen Baum oder
hinter einen steilen Berg kann man weder mit dem Auge, noch mit dem Radar schauen.)
4 Theorie für Aufgaben
4.0.1 Aufgabe 2
Geostrophischer Wind
Information: In der Meteorologie spricht man von einem ’Luftpaket’ um die Bewegung
eines bestimmten Luftvolumens zu beschreiben.
Herrscht in der Atmosphäre ein horizontaler Druckgradient, wirkt die sogenannte Druck-
Abbildung 10: Entstehung des geostrophischen Windes
kraft (oder Gradientenkraft) auf ein Luftpacket. Diese Kraft wirkt vom höheren zum
niedrigeren Druck und bewegt somit das Luftpacket von der Seite höheren Druckes in
Richtung tieferen Drucks. Sobald sich das Luftpaket aber in Bewegung setzt, beginnt
eine zweite Kraft zu wirken: die Corioliskraft. Diese lenkt das Luftpaket von seiner Bahn
ab (auf der Nordhalbkugel nach rechts, auf der Südhalbkugel nach links). Diese Ablen-
kung geschieht solange, bis Druckkraft und Corioliskraft sich gegenseitig aufheben. In
diesem Gleichgewicht läuft die Bewegung des Luftpaktes parallel zu den Isobaren (Linien
gleichen Druckes), was dem geostrophischen Wind entspricht. (Siehe Abbildung 10)
Zur Berechnung der Geschwindigkeit des geostrophischen Windes gibt es folgende For-
mel:
12g δz
|v| = ∗ (2)
f δx
Dabei bedeuten die einzelnen Variablen:
g = Gravitationsbeschleunigung (g = 9.81 sm2 )
f = Coriolisparameter für den betrachteten Breitengrad = 2 ∗ ω ∗ sin(φ)
mit ω= Erdrotationsgeschwindigkeit und φ= betrachteter Breitengrad
δz
δx
= z2 (xx22)−z
−x1
1 (x1 )
δ z = Äquidistanz der Höhenlinien des Geopotentials
δ x = geographischer Abstand der Höhenlinien
4.0.2 Aufgabe 3
Barometrische Höhenformel
Für die Teilaufgaben d) und e) der Aufgabe 3 werdet ihr die barometrische Höhenformel
brauchen. Diese Formel (4) wird aus der hydrostatischen Grundgleichung (3) hergeleitet
dp
= −gρ (3)
dz
T0
− ∗ hh
p = p0 ∗ e T 0 (4)
wobei p0 der Druck auf Meereshöhe und h0 die sogenannte Skalenhöhe (für Normal-
bedinungen 8km) ist. Da wir in unserem Fall nur einzelne Druckniveaus betrachten,
verwendet man die diskrete barometrische Höhenformel 5:
T0 h2 −h1
∗
p1 = p2 ∗ e T 0 h0
(5)
Dabei ist p1 das untere, p2 das obere Druckniveau und T 0 die mittlere Temperatur in
der Schicht zwischen den beiden Druckniveaus.
Die vertikale Verteilung der absoluten Luftfeuchtigkeit unterscheidet sich stark von der
vertikalen Verteilung der relativen Luftfeuchtigkeit. Während die absolute Luftfeuchtig-
keit aufgrund der Druck- und Temperaturabnahme (Volumenänderung des Luftpakets)
mit der Höhe stark abnimmt, kann die relative Luftfeuchtigkeit bis hoch in die obere
Troposphäre noch hohe Werte annehmen, da diese stark von der Temperatur abhängig
ist. Das heisst, bei kalten Temperaturen in der oberen Troposphäre ist der Sättigungs-
dampfdruck viel tiefer als in der unteren Troposphäre/in Bodennähe. Somit können auch
bei einer tiefen absoluten Luftfeuchtigkeit hohe relative Werte vorliegen.
Abbildung 11 zeigt die vertikale Verteilung der relativen Feuchte im Zentrum der Zyklone
Xynthia zum Zeitpunkt ihrer maximalen Intensität am 28. Februar 2010.
13Abbildung 11: Vertikale Verteilung der relativen Luftfeuchtigkeit durch das Zentrum der
Zyklone Xynthia. Der Schnitt wurde durch den 46. Breitengrad gezogen. Von 15°W bis 5°O.
5 Aufgaben
Für die Aufgaben benötigte Links sind auf der Website für den Versuch Remote Sensing
abgelegt: http://iacweb.ethz.ch/igp3.
5.1 Aufgabe 1: Kennenlernen von Satelliten- und Radarbildern
Mithilfe der in Echtzeit verfügbaren Radar- und Satellitenbilder könnt ihr das aktuelle
Wetter beschreiben und verfolgen. Dazu findet ihr auf der Website für Versuch A einige
Links.
Verschafft euch einen ersten Eindruck davon. Es wird anschliessend im Plenum bespro-
chen werden, wie diese Bilder zu verstehen sind.
5.2 Aufgabe 2: Wetterphänomen über Island
a.)
Auf der Website ist an dieser Stelle eine Abfolge von Satellitenbildern zu sehen. Macht
euch ein paar Gedanken, was hier zu sehen ist. Der rote Kreis, ersichtlich in der Variable
BT108, markiert ein bestimmtes Phänomen. Was ist es?
Tipp: Die Ursache war ein Naturereigniss in Island, welches in den Medien sehr präsent
war.
b.)
Dasselbe Phänomen könnt ihr hier auf verschiedenen Kanälen betrachten:
14• VIS (’visible’, sichtbar)
• IR (Infrarot)
• WV (’water vapor’, Wasserdampf)
Was sind die Unterschiede zwischen den Kanälen, respektive zwischen den Infos, die
uns die jeweiligen Kanäle liefern? Tipp: Die Einträge im Fernerkundungslexikon aus der
Aufgabe 1 könnten dabei nützlich sein, euch über die Eigenschaften der verschiedenen
Kanäle zu informieren.
Ihr wollt nun die Höhe des Phänomens bestimmen. Dazu wendet ihr 2 unterschiedli-
che Methoden an.
Methode 1: Ihr bestimmt die Temperatur des Phänomens, dann bestimmt ihr auf wel-
cher Höhe diese Temperatur mit der Umgebungstemperatur übereinstimmt. Annahme:
Phänomen ist im thermischen Gleichgewicht mit der Atmosphäre, das heisst Phänomen-
Temperatur entspricht Umgebungstemperatur.
Methode 2: Ihr bestimmt die Geschwindigkeit des Phänomens, dann bestimmt ihr auf
welcher Höhe diese Bewegungsgeschwindigkeit mit der Geschwindigkeit des geostrophi-
schen Windes übereinstimmt.
c.)
Wendet Methode 1 an. Überlegt euch dazu als erstes, welcher Kanal zur Temperaturbe-
stimmung des Phänomens am besten geeignet ist.
Tipp: Die Umgebungstemperatur auf verschiedenen Höhen könnt ihr mithilfe der Tem-
peraturkarten aus den ECMWF-Daten abschätzen.
d.)
Wendet Methode 2 an. Bestimmt dazu als erstes, die Geschwindigkeit des Phänomens.
Bestimmt dann die Geschwindigkeit des geostrophischen Windes auf einzelnen Druckle-
vels (in Absprache mit den Assistenten). Die Formel dazu findet ihr im Theorieteil. Tipp:
Um die Geschwindigkeit des Phänomens zu bestimmen sucht ihr euch am besten einen
gut erkennbaren Teil aus und bestimmt davon die Koordinaten zu verschiedenen Zeit-
punkten. Für die Entfernungsberechnung verschiedener Koordinatenpunkte, kann dann
die zu dieser Aufgabe verlinkte Website verwendet werden. Benutzt für diese Aufgabe
die Tabelle in Anhang 6.1.
e.)
Vergleicht die Ergebnisse zur Höhe die ihr durch die beiden Methoden erhalten habt.
Wie erklärt ihr euch den Unterschied?
15f.)
Welche Auswirkungen auf den Flugverkehr sind zu erwarten?
5.3 Aufgabe 3: Zyklon Xynthia
Der Sturm Xynthia hatte auf viele europäische Länder Europas einen Impakt, darunter
auch die Schweiz. Starke Böen am 27. und 28. Februar 2010 verursachten ausgedehnte
Schäden auf Verkehrswegen, Stromausfälle, Zerstörungen durch Überschwemmungen an
der französischen Atlantikküste und den Verlust von mehr als 60 Menschenleben. Die
meisten Schäden gab es in Frankreich und im westlichen Deutschland. Xynthia entstand
am Freitag, den 26. Februar aus einem anfänglich flachen Tiefdruckgebiet, das sich über
dem subtropischen Seegebiet südlich der Azoren bildete. Der südwärtige Fluss von käl-
teren Luftmassen in der höheren Atmosphäre verursachte die Vertiefung eines breiten
Troges über dem mittleren und östlichen Atlantik. Ein kurzwelliger Trog innerhalb dieses
breiteren Systems und eine hohe Temperaturdifferenz zwischen extrem warmer Luft über
Afrika und kälterer Luft über dem östlichen Atlantik bewirkte eine starke Zyklogenese
von Xynthia. Am Samstag, den 27. Februar zog das Tief nordostwärts über Portugal und
die Biskaya zu den westlichsten Gebieten Frankreichs und intensivierte sich sehr rasch
zu einem Kerndruck von etwa 967 hPa um Mitternacht, das bedeutet eine Vertiefung um
etwa 20 hPa innerhalb von 24 Stunden. Während der folgenden drei Tage begann sich
das Tief abzuschwächen und zog weiter nordostwärts entlang der Küstenlinie von Nord-
frankreich und der Nordsee, dann überquerte es die südliche Ostsee bis nach Finnland
bis zum 3. März. Dort hatte es einen Kerndruck von 990 hPa bei weiterer langsamer
Verlagerung und Abschwächung.
a.)
Ihr habt Satellitenbilder dieses Sturms zu verschiedenen Zeitpunkten. Versucht diese
richtig anzuordnen.
b.)
Ihr wollt nun die vertikale Feuchtigkeitsverteilung entlang des 45 Breitengrad zur Zeit
12 UTC erstellen. Benutzt dazu das vorgefertigte Raster in Anhang 6.2 und füllt bei
den Punkten jeweils die entsprechende Feuchtigkeit ein. Zeichnet dann die Konturen
der Gebiete: >20%, >50%, >80% und >95% ein. Tipp: Am einfachsten ist dies, wenn
ihr einmal auf den Längen- und Breitengrad von Interesse klickt und dann dort die
unterschiedlichen Höhen durchklickt. In der Theorie zu dieser Aufgabe könnt ihr eure
Feuchtigkeitsverteilung mit der Abbilung 11 vergleichen.
c.)
Auf der von euch angefertigten Karte ist nun die vertikale Verteilung des Wasserdampfs
zu sehen. Welche Informationen gibt uns dies bezüglich der Dynamik innerhalb des
16Sturms? Zeichnet mit aufsteigenden und absinkenden Pfeilen die Luftbewegung ein. Wo
und wieso findet Kondensation statt?
d.)
Um die Höhe des Feuchtigkeitsgebietes(>95%) zu ermitteln, benutzt ihr die barometri-
sche Höhenformel. Benutzt dazu die vorbereitete Tabelle in Anhang 6.3 .
e.)
Was sind mögliche Fehlerquellen bei der Bestimmung der Höhe mithilfe der barometri-
schen Höhenformel?
5.4 Aufgabe 4: Bildinterpretation einer Radaraufnahme
a.)
Was kann man erkennen?
b.)
Warum sind manche Gebiete hell, warum andere dunkel?
c.)
Woran erkennt man Gebäude?
d.)
Wie unterscheiden sich Weideland von Wald? Warum?
e.)
Warum sind hohe Gletscher hell und tiefere dunkel? (Aufnahmedatum beachten!)
f.)
Von welcher Seite nahm der Radar das Bild auf (bzw. von woher ’blickt’ er auf das Bild)?
g.)
Wie kann man aus einer topographischen Karte und der Analyse der Aufnahme den
Aufnahmewinkel berechnen? Wir gross ist der Aufnahmewinkel?
h.)
Warum sind keine Wolken erkennbar?
176 Anhang
6.1 Berechnung geostrophischer Wind
Geschwindigkeit Phänomen =
δz
δz δx δx
|v|
100
hPa
250
hPa
300
hPa
400
hPa
500
hPa
700
hPa
850
hPa
1000
hPa
Tabelle 1
Vermutete Höhe des Phänomens =
186.2 Vertikalschnitt durch Feuchtigkeitsverteilung
Tabelle 2: Vertikales Raster entlang des 45. Breitengrades zur Erstellung des Vertikalschnittes
der relativen Feuchte f von Aufgabe 3.
100
hPa
250
hPa
300
hPa
400
hPa
500
hPa
700
hPa
850
hPa
1000
hPa
20°W 10°W 0° 10°E 20°E
196.3 Bestimmung der Höhe des Feuchtigkeitsgebietes
T0
Höhe h = δhi mit: δhi = h0 ∗ ∗ ln pp12
P
T0
mittlere Temperatur T 0 = 12 (Toben + Tunten )
T0 = 273K h0 = 8000m
Bereich T0 p1 /p2 δhi
1000 - 850
hPa
850 - 700
hPa
700 - 500
hPa
500 - 400
hPa
400 - 300
hPa
300 - 250
hPa
250 - 100
hPa
Tabelle 3
Höhe des Feuchtigkeitsgebietes h =
20Sie können auch lesen