Status Galileo - und dessen Nutzen für die präzise Positionierung - EPOSA Anwendertreffen - 7.Mai 2013
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Status Galileo -
und dessen Nutzen für die präzise Positionierung
EPOSA Anwendertreffen – 7.Mai 2013
Robert Weber
Department für Geodäsie und Geoinformation
FG Höhere Geodäsie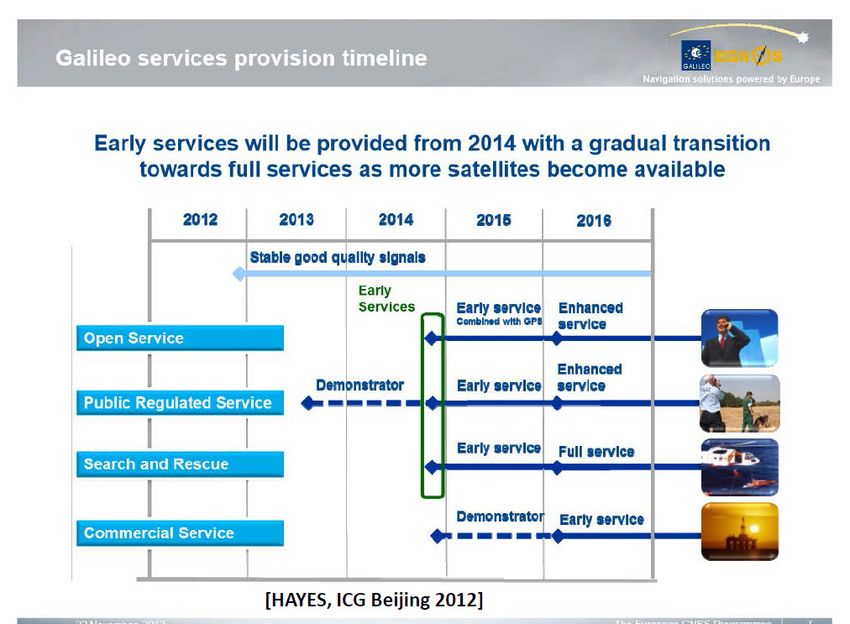
Meldung Standard
Aktive GNSS und SBAS

Galileo Konstellation
Walker 27/3/1 orbit radius ~29990 km
plus 3 in-orbit spares (1/plane)
inclination 56 deg
period: ~ 14 h./4 min./42 s
17 orbits in 10 days
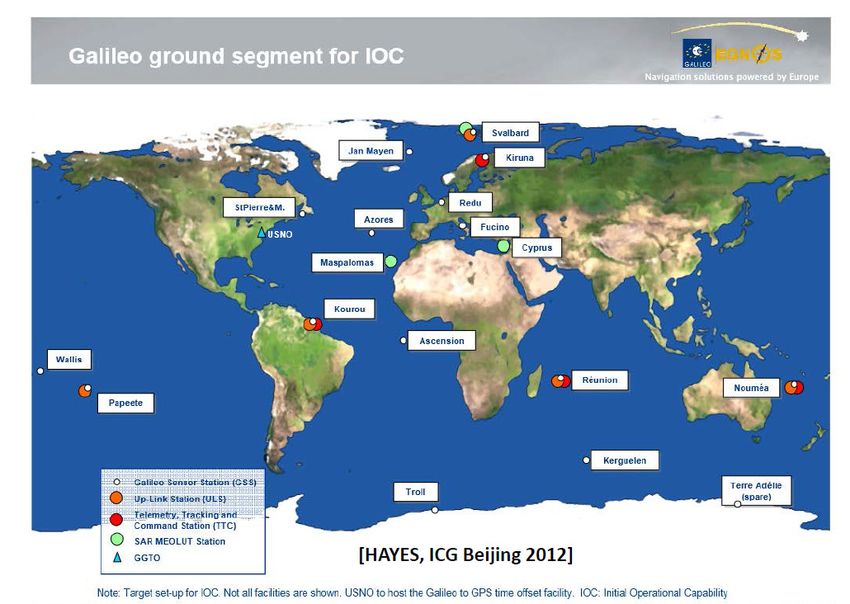
Galileo Kontrollsegment
Galileo Raumsegment - Aufbau
•4 Satelliten bereits im All
– 4 IOV
•Weitere 22 Satelliten finanziert und bestellt
– 14 FOC + 8 FOC
•Launch Services bereitgestellt durch
Arianespace
– Soyuz: 7 Starts für 14 Satelliten (incl.
der IOV ; bis Herbst 2014)
– Ariane 5: 3 Starts für 12 Satelliten
IOV: In-Orbit Validation
(Ende 2014 bis Mitte 2015) Photo: ESA
Galileo Services

IGS- MGEX Netzwerk (Frühjahr 2013)
• ~10 Organisationen
• ~50 Stationen weltweit
• real-time Stationen (NTRIP,
RTCM3-MSM) R/T stations
• 6 Empfängertypen http://mgex.igs-ip.net/home
7 Antennentypen
• Datnaufnahme:
Galileo, BeiDou, QZSS
• Datenarchive
CDDIS, IGN, BKG
• RINEX 3
• R/T Caster BKG
• Freier Datenzugang
Offline stations
ftp://cddis.gsfc.nasa.gov/pub/gps/data/campaign/mgex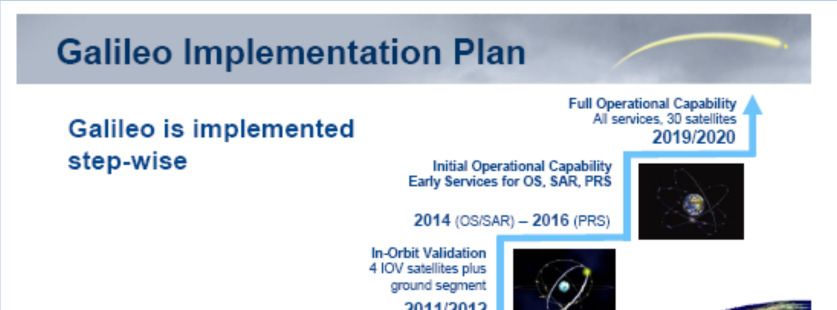
Koordinatenlösungen berechnet durch AIUB Bern
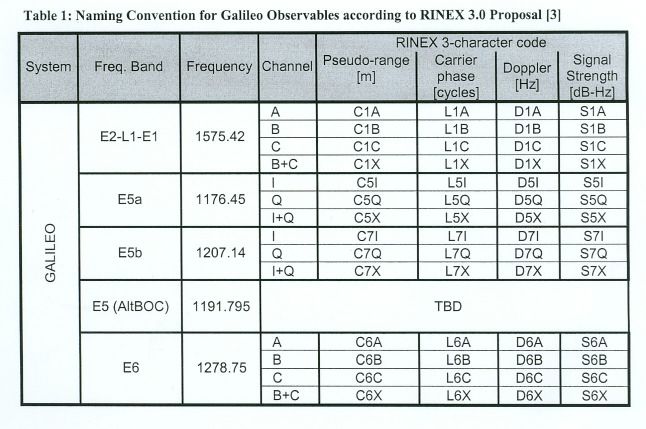
Vielfalt neuer Signale
Galileo Signale und Trägerfrequenzen
Graphik : ESA
Galileo sendet
10 unterschiedliche
Signale
Pilot bzw. Data-ChannelsGiove-A / GPS Signalqualität
T.Springer et al.
E5a (C5I, C5Q) , E5b (C7Q), E5a+b (C8Q, derzeit kaum unterstützt),
E1A bzw E6 derzeit ‚restricted‘ ;
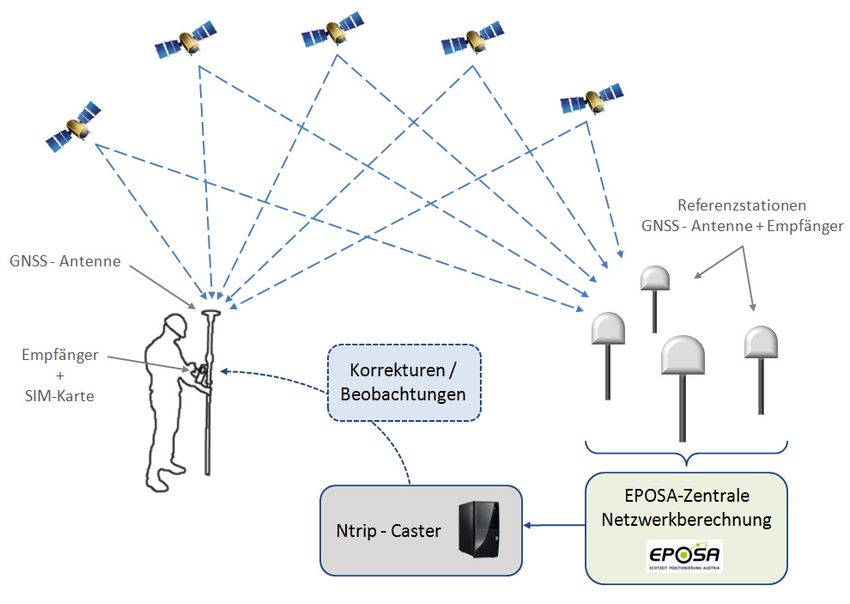
Spezielle Galileo Signale bieten Rauschlevel vonRTK: Referenzstationsnetze – Systemaufbau (schematisch)
RTK: Referenzstationsnetze – Datenfluss/Prozessierung
Datenaufnahme ->
Reference
an Zentrale senden
Mehrdeutigkeits-
lösung in Zentrale
Interface
MAC
Processing
Aussendung von Residuen im
Netz bzw. Erstellung + Aus-
sendung von Fehlermodellen
Korrigiere Messungen für
Roverposition
Interface
VRS
Rover
Berechne
RoverpositionLinearkombinationen
L x = κ 1,x L1 + κ 1,x L2
Px = κ 1,x P1 + κ 1,x P2
Beispiele:
c
Widelane λ5 =
f1 − f 2
GPS (L1/L2) : λ5 ≈ 0.86m
Galileo (E5a/E5b) : λ5 ≈ 9.77 m
Galileo (E5a/E5) : λ5 ≈ 19.54m
Melbourne-Wübbena
1
∆L6j , AB = ( f1 ∆L1 − f 2 ∆L2 ) − 1 ( f1 ∆P1 + f 2 ∆P2 )
f1 − f 2 f1 + f 2
Achtung: Signal-Linearkombination erhöhen auch das Rauschniveau verglichen
mit den Grundsignalen bzw. TrägerwellenmessungenSchritte zur Koordinatenbestimmung des Rovers
Schritt 1: Melbourne-Wübbena- Linearkombination L6
1 1
∆L6j , AB = ( f1 ∆L1 − f 2 ∆L2 ) − ( f1 ∆P1 + f 2 ∆P2 )
f1 − f 2 f1 + f 2
Diese Linearkombination eliminiert die ionosphärische Verzögerung, die
Geometrie, die Satelliten- und Empfängeruhrfehler als auch die
troposphärische Verzögerung. Bei Vorliegen guter P-Code Beobachtungen
mit einem Rauschlevel von < 3 dm ist diese Linearkombination
hervorragend zur Fixierung der Wide-Lane Ambiguities N5 geeignet
Schritt 2: Narrow-Lane Linearkombination L 3 = ionosphärenfrei
f2 c
∇∆B3jk,AB =c ∇∆N 5jk,AB + ∇∆N 1jk,AB
f 12 − f 22 f1 + f 2
Liefert fixierte Mehrdeutigkeit auf einer ca. 11cm Wellenlänge. Einsetzen in
Beobachtungsgleichung erlaubt Festlegung der Basislinie zur Referenzstation
mit hoher Genauigkeit.
•Lösung in Quasi-Echtzeit gesucht -> Kalman-Filter
r
Parameter: x Rover , ∆t Rover , N SRei f ,RovGalileo im Überblick • Galileo liefert Trägerphasen- und Codesignale höchster Qualität • Broadcast Bahnfehler+ Uhrenfehler < 65 cm • Galileo Koordinatenrahmen: ITRF2008 • Galileo Systemzeit: GST • Galileo weitgehend GPS-interoperabel •Galileo Signalcodierung unterstützt Multipath-Mitigation •Der Rauschlevel spezieller Galileo Signale ist sehr klein (z.B E5 AltBoc < 10cm) • Galileo erlaubt Extra Widelaning (direkte Mehrdeutigkeitsfixierung) • Galileo erlaubt Trilaning (Ionosphärenfreie LC mit Integermehrdeutigkeiten)
GNSS –Positionierung allgemein
GNSS = GPS + GLONASS + (GALILEO) + (Beidou)...
ab 2016 werden rund 80-100 Navigationssatelliten zur
Verfügung stehen
Die Nutzung von GPS+GLONASS+ GALILEO+Beidou
+ erhöht die Anzahl der verfügbaren Beobachtungen
+ erhöht den Prozentsatz erfolgreicher Positionierungen im
sichteingeschränkten Gebieten (z.B. Stadtgebiet)
+ verbessert weitgehend die Schnittgeometrie (DOP)
+ verringert die Mehrdeutigkeits-Fixierungszeit bei RTK
- erhöht die Komplexität der Signalakquisition
- Inter- und Intrasystem Biases (->Kalibrierung der Kanäle)
- erhöht die Anforderungen an standardisierte Übertragungsformate
(-> RTCM 3.2 Multi-Signal-Messages -> RINEX 3.02)
- erhöht die Anforderungen an Hard- und Software bei
Nutzer und ReferenzstationsbetreiberBesten Dank
für Ihre
AufmerksamkeitObservation Exchange Format -> RINEX 3.0 (by W. Gurtner)
Methoden der Mehrdeutigkeitslösung
Im Prinzip ein Suchverfahren der zur Geometrie Rover-Satelliten passenden
Mehrdeutigkeiten auf 1.Differenzniveau
-> Beobachtungen mit mm- bis einige cm Genauigkeit
Vorgangsweise:
•Anbringen der für die Rover-Position interpolierten ‚Range-
Corrections‘ an die Roverstreckenmessungen
•Differenzbildung zu Referenzstation
•WideLane/Narrow-Lane (L5/L3) Lösung oder nach wegen
bereits erfolgter Iono-Korrektur direkte L1/L2-Lösung
(In beiden Fällen ist der Startwert eine gute Code-Position)
•Lösung in Quasi-Echtzeit gesucht -> Kalman-Filter
Parameter:
•Probleme: Datenübertragungsausfälle, Multipath
r
x Rover , ∆t Rover , N SRei f ,RovEarly Services : OS, PRS, Search&Rescue ab Ende 2014
Beobachtungsgleichungen für die Code- und Phasenmessung PSR,i + v SR,i = ρSR + ∆ρSR,Ion,i + ∆ρSR,Trop + ∆ρSR,rel + c*∆tR - c*∆tS L SR,i + v SR,i = ρSR - ∆ρSR,Ion,i + ∆ρSR,Trop + ∆ρSR,rel + c*∆tR - c*∆tS + λi*NSR,i Netzwerk RTK Korrekturen / RTCM V3.x = 1.Differenzen zwischen Master und Auxiliary Referenzstationen ∆LSM ,A − δ∆ρSM ,A − c ∆t M ,A − λ∆NSM ,A = bekannt = geometrische Fehleranteile (M1015) • Troposphäre, Orbits, .. + dispersive Fehleranteile (M1016) • Ionosphäre Troposphärische Korrektur, Ionosphärische Korrektur und Orbitfehler sind räumlich korreliert – erste Differenzen reduzieren diese Effekte über große Distanzen
Linearkombinationen L x = κ 1,x L1 + κ 1,x L2
c Px = κ 1,x P1 + κ 1,x P2
Widelane λ5 =
f1 − f 2
GPS (L1/L2) : λ5 ≈ 0.86m
Galileo (E5a/E5b) : λ5 ≈ 9.77 m
Galileo (E5a/E5) : λ5 ≈ 19.54m
n(L1) m (E5a) k(E5b) l (E5) r(E6) Wavel. Iono Iono/Wavel.
0 1 -1 0 0 9.768 -1.748 -0.18
0 1 0 -1 0 19.537 -1.770 -0.09
0 2 -3 0 -1 29.305 -0.769 -0.03
1 4 1 -3 -3 3.907 -0.001 -0.00
3 -5 0 0 3 0.112 0.000 0.00
4 -3 1 1 0 0.109 -0.000 -0.00Sie können auch lesen