Kartendaten im Testfeld Niedersachsen - Das Testfeld Niedersachsen bietet, eLib
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Michael Scholz, Lennart Asbach
Das Deutsche Zentrum für Luft- und Raumfahrt e. V. hat in Kooperation mit dem Ministe-
rium für Wissenschaft und Kultur (MWK) und dem Ministerium für Wirtschaft, Arbeit, Ver-
kehr und Digitalisierung (MW) des Landes Niedersachsen das Testfeld Niedersachsen für
die Erprobung und Erforschung vernetzter und automatisierter Mobilität entworfen und
aufgebaut [1].
Kartendaten im Testfeld Niedersachsen
D
as Testfeld Niedersachsen bietet, kehr, müssen also entsprechenden Zulas- wird in den kommenden Jahren um die rest-
insbesondere für kleine und mittel- sungsanforderungen genügen, können aber lichen Module erweitert. Entlang einiger
ständische Unternehmen in der Re- über detaillierte Umgebungsinformationen Streckenabschnitte sind Komponenten der
gion, eine offene Plattform für die Erfor- verfügen, um eigene Bewegungen oder die Erfassungstechnik zur Verkehrsbeobach-
schung und Evaluation des automatisierten der anderen Verkehrsteilnehmer leichter er- tung sowie Komponenten der Kommunika-
und vernetzten Fahrens auf Autobahnen, fassen zu können. Motivation für den Auf- tionstechnik für den Nachrichtenaustausch
Landstraßen und urbanen Bereichen. Der bau des Testfelds ist folglich die Schaffung zwischen Verkehrsteilnehmern und der Stra-
Aufbau wurde hälftig aus EFRE-Mitteln (Eu- eines Nährbodens für die zukünftige Mobi- ßeninfrastruktur installiert. Die Erfassungs-
ropäischer Fonds für regionale Entwicklung) lität und zusätzlich eine umfangreich aus- technik erlaubt die hochgenaue Verfolgung
des Landes Niedersachsen und aus Eigen- gestattete Erprobungsmöglichkeit für Fahr- (< 25 cm) aller Fahrzeuge auf einem Ab-
mitteln des DLR finanziert. zeuge auf dem Weg zur Serienfertigung, schnitt von knapp 8 km. Die Kommunikati-
Das Testfeld soll den Zugang zu digitalen insbesondere im Bereich der Automatisie- onstechnik stellt den Datenaustausch zwi-
Daten im Verkehrsbereich für Unternehmen rung und Vernetzung. schen Fahrzeugen und Infrastruktur auf
vereinfachen und standardisieren. Die Daten etwa 18 km Autobahn und ähnlicher Länge
sollen für neue Konzepte in der Mobilität, für Das Testfeld stellt sich vor im innerstädtischen Bereich sicher. Bei-
neue Dienste oder für Verifikations- und Er- Das Testfeld Niedersachsen umfasst etwa spielsweise Gefahrenmeldungen oder der
probungszwecke genutzt werden können. 280 km verschiedener Straßentypen mit Zustand von Lichtsignalanlagen (Ampeln)
Mit dem Testfeld wurde eine Umgebung ge- Schwerpunkt auf Autobahnen im Großraum können so an die Fahrzeuge übertragen
schaffen, die zwischen Serieneinsatz und Wolfsburg-Braunschweig-Hannover-Hildes- werden. Auf Software- und Dienstseite wer-
Prüfgelände liegt. Fahrzeuge auf dem Test- heim. Aktuell ist der Ausbau der Module 0, den den Partnern Schnittstellen zu ebendie-
feld bewegen sich im realen Straßenver- 1 und 4 abgeschlossen (Titelbild / Bild 1) und sen Systemen und zu Informationssystemen
188 l
VDVmagazin 3/21 Kartendaten im Testfeld Niedersachsen
Aber was eigentlich ist eine HD-Karte und
SD-Karte HD-Karte
was kennzeichnet demgegenüber eine
Fahrstreifengrenzen,
nicht-HD-Karte bzw. SD-Karte (standard-
Abbildungsumfang der Verkehrsachsen und Fahrbahnmarkierungen,
Straßentopografie Einzelstraßenmittelkanten Bordsteinkanten, ggf. definition map)? Die Literatur liefert keine
Fuß- und Radwege eindeutige Definition und der Leistungsum-
Beschilderung, Lichtsignal- fang von “high definition” variiert zwischen
anlagen, Pfosten und Mas- unterschiedlichen Kartenanbietern. Eine
Abbildungsumfang von ggf. verkehrsregelnde
ten, lineare Begrenzungen kürzlich in Australien publizierte Literatur-
Infrastrukturobjekten Beschilderung
wie Leitplanken, Schall- auswertung liefert allerdings einen sehr gu-
schutz, Mauern
ten Überblick [3]. Tabelle 1 stellt die typi-
zus. Signal- und Schild- schen Merkmale von SD- und HD-Karten
Fahrtrichtungs- und
verkehrsregelnde Logik semantik, Fahrstreifen-
Abbiegebeschränkungen gegenüber. Im folgenden Abschnitt werden
nutzung
die Kernanwendungsfälle des Testfelds mit
verkehrsachsengenau fahrstreifengenau mit
Granularität der Logik ihren unterschiedlichen Anforderungen an
und straßengenau Signalverknüpfung
ein detailliertes Abbild des Straßenraums
Granularität des verkehrsachsengenau
fahrstreifengenau näher beleuchtet.
Routing-Graphen und straßengenau
Dimensionalität der
2-D 3-D Unterschiedliche Anforderungen
Geometrie
aus den Anwendungsfällen
Tabelle 1: Gegenüberstellung typischer Merkmale von SD- und HD-Karten.
Erfassung des Verkehrs
Bevor Fahrzeugfunktionen im realen Um-
des Verkehrsmanagements bereitgestellt Rolle — sogenannte HD-Karten (high-defi- feld getestet und später auch serienmäßig
und Hintergrundsysteme zum Datenmana- nition maps). Das Testfeld Niedersachsen eingesetzt werden können, gilt es diese Sys-
gement betrieben. Auf Datenseite stehen für ermöglicht die Betrachtung verschiedener teme im Hinblick auf Kostenreduktion und
Entwicklungszwecke durch simulationsba- Anwendungsfälle mit unterschiedlichen An- Risikominimierung mithilfe des simulations-
siertes Testen Szenariobeschreibungen und forderungen an solche digitalen Straßenda- basierten Testens hinreichend zuverlässig zu
ausgewählte Modelle bzw. Simulationen be- ten. Simulationen und Funktionstests im La- entwickeln. Dazu werden Szenarien definiert,
reit. Als Kernbestandteil des Testfelds sind bor benötigen Geodaten, die ebenfalls die von solch einem automatisierten System
hochgenaue Straßenkartendaten verfügbar, autonomen Fahrzeugsystemen im realen in einer Computersimulation zufriedenstel-
erweitert um ein Kataster zum Zustand des Umfeld als Orientierungshilfe dienen oder lend absolviert werden müssen. Abgeleitet
Testfeldes (u. a. zu Fahrstreifenmarkierun- als vereinfachte 2-D-Karten einen räumli- werden die Szenarien unter anderem durch
gen und Beschilderung). chen Kontext für die Visualisierung von For- Beobachtung realer Situationen des Stra-
schungsergebnissen bilden. Im Idealfall ßenverkehrs. Die stationär installierte Erfas-
Hochgenaue Straßenkarten existiert ein einziger Geodaten-Pool, der sungstechnik an Kreuzungen (Bild 2) und
In vielen Entwicklungsschritten bei der Er- alle Anwendungsfälle bedienen kann. Häu- entlang einiger Autobahnabschnitte im Test-
probung und Erforschung vernetzter und fig weicht dabei die Datenmodellierung der feld Niedersachsen ermöglicht die Erfassung
automatisierter Mobilität spielen hochgenau Automobildomäne von typischen Ansätzen von Verkehrsteilnehmern und deren Be-
vermessene Straßenkarten eine wichtige der Geoinformationssysteme (GIS) ab [2]. wegungsbeziehungen zwischeneinander
Bild 3: Erfasste Fahrzeuge (grün) mit Trajektorie (rot)
Bild 2: Verkehrserfassungstechnik an einer Kreuzung im Testfeld Niedersachsen. (Quelle: DLR) und Bewegungsrichtung (gelb). (Quelle: DLR)
l
Kartendaten im Testfeld Niedersachsen VDVmagazin 3/21 189
metriemodellierung mit diskreten Koordina-
tenstützpunkten oft als „nicht ausreichend
geschmeidig“ angesehen wird. Stattdessen
werden Liniengeometrien von den Simulati-
onsframeworks als parametrisierte Kurven-
polynome erwartet, die eine Berechnung von
stetigen/”glatten” Bewegungspfaden er-
leichtern. Häufig kommen hier Spezialfor-
mate wie das standardisierte OpenDRIVE [5]
für die Straßenraumabbildung zum Einsatz,
welches auch im Testfeld Niedersachsen
verwendet wird. OpenDRIVE kombiniert die
fahrstreifengenaue Modellierung der Stra-
ßentopografie durch stetige Kurvenbeschrei-
bungen mit einer feingranularen Topologie
Bild 4: Fahrsimulation im Virtual-Reality-Labor (links), in Kombination mit anderen Verkehrsteilnehmern
(rechts oben) und im dynamischen Fahrsimulator. (Quelle: DLR) und der Möglichkeit zur Spezifizierung visu-
eller Attribute für Visualisierungsanwendun-
gen. Wie im vorherigen Anwendungsfall auch
(Bild 3) — natürlich unter Beachtung aktuel- Fahr- und Verkehrssimulation spielt bei der Fahr- und Verkehrssimulation
ler Datenschutzrichtlinien. Man möchte Aus- Im Entwicklungszyklus werden unterschied- die innere Genauigkeit der vermessenen Da-
sagen treffen können zu Fragen wie bei- liche Aspekte simuliert. Menschzentrierte ten eine höhere Rolle als die äußere. Für ei-
spielsweise: Ansätze untersuchen in einer Fahrsimulation nige Fragestellungen werden sogar komplett
•• „Wie weit hinter der Haltlinie kam dieses aus der Fahrerperspektive das Verhalten ei- synthetische Szenarien ohne reales Abbild
Fahrzeug zum Stehen?“ und nes oder mehrerer Verkehrsteilnehmer, bei- im Labor simuliert.
•• „Wie lang war der Anhalteweg des dar- spielsweise im Umgang mit teil-automatisier-
auffolgenden Fahrzeugs, wie lang sein ten Fahrzeugen (Bild 4). Fahrsimulationen Eigenlokalisierung von Fahrzeugen
Reaktions- und Bremsweg?“ werden in der virtuellen Realität durchge- Ein hochautomatisiertes oder autonomes
führt, welche oft auf Realdaten basiert. Hier Fahrzeug greift für seine Orientierung im
Dies ermöglicht beispielsweise die Identifi- spielen visuelle Objekteigenschaften, wie Straßen- und Verkehrsumfeld nach aktuel-
zierung kritischer Verkehrssituationen, die Texturen und 3-D-Modelle, und eine detail- lem Stand der Technik auf eine Vielzahl in-
ein zukünftiges automatisiertes System getreue Abbildung des Fahrzeugumfelds zu- stallierter Sensoren zurück. Das Zusam-
(besser) bewältigen können muss. Solche sätzlich zur Straßentopografie eine wichtige menspiel dieser Fahrzeugsysteme wird
Situationen werden formalisiert und als zu Rolle. Viele etablierte Simulationssoft- unter anderem mithilfe von Sensorsimula-
testende Szenarien für Simulationen heran- waresysteme der Automobildomäne erwar- tionen entwickelt. Für die Sensorsimula-
gezogen. Das Sammeln von Erkenntnissen ten diese Eigenschaften allerdings ebenfalls tion sind Material- und beispielsweise Re-
aus Beobachtungen des Realverkehrs un- in einer hochgenauen Straßenkarte vorzufin- flexionseigenschaften von Objekten
terstützt die Zusammenstellung von Test- den. Dies stellt hohe Ansprüche an HD-Stra- wichtig. Diese Anforderungen sprengen
fällen für das Absichern autonomer Fahr- ßenkarten, die meist nicht mehr in flachen den Leistungsumfang einer üblicherweise
funktionen und bildet das Forschungsfeld GIS-Modellen abbildbar sind, sondern auf verwendeten HD-Karte und auch der ak-
der Operational Design Domain (ODD). Im
Zuge der Kalibrierung von Erfassungstech- „Im Idealfall existiert ein einziger Geodaten-Pool,
nik während ihrer Installation wird unter an- der alle Anwendungsfälle bedienen kann.“
derem auch auf präzise eingemessene Ele-
mente des Straßenraums zurückgegriffen. einem komplexeren Datenmodell mit vielen tuellen Implementierung im Testfeld Nie-
Dabei reicht es aus, wenn die Straßendaten Querverweisen basieren. Wird über eine Ver- dersachsen (die zweite Phase des Test-
in gängigen GIS-Modellen und -Formaten kehrssimulation zusätzlich sogenannter felds befindet sich aktuell in Planung und
bereitgestellt werden und neben der zwei- Fremdverkehr hinzugezogen, so ist bei einer soll Teile der Karte um die fehlenden Ei-
dimensionalen Lageinformation auch Hö- Straßenraumabbildung neben der detaillier- genschaften ergänzen). Allerdings erfolgt
henwerte enthalten. Da bei diesem Anwen- ten Topografie auch eine konsistente Topo- bei der Entwicklung autonomer Fahrfunk-
dungsfall der Fokus auf Beziehungen von logie wichtig, um die Bewegung anderer Ver- tion eine Transition aus der virtuellen Si-
Verkehrsteilnehmern zueinander und zu ih- kehrsteilnehmer fahrstreifengenau auch über mulationsumgebung hin zu realen Erpro-
rem Umfeld liegt, ist eine innere Genauig- komplexe urbane Kreuzungen hinweg be- bungsfahrten, bei denen eine hochgenaue
keit der Straßendaten (“Präzision” nach DIN rechnen zu können (hierzu auch VDVmaga- Karte in zweierlei Hinsicht relevant ist: für
ISO 5725 [4]) ausschlaggebender als ihre zin 1/21, S.24 ff). Mögliche Bewegungspfade die Positionsbestimmung eines Fahrzeugs
möglichst fehlerfreie absolute Verortung, des Fremdverkehrs werden aktuell (leider) und als sogenannter elektronischer Hori-
also als ihre äußere Genauigkeit (“Richtig- noch oft aus den Straßenkarten selbst ab- zont zur Bewertung des Straßenzustands
keit” nach DIN ISO 5725). geleitet, weswegen eine GIS-typische Geo- auf der geplanten Route.
190 l
VDVmagazin 3/21 Kartendaten im Testfeld Niedersachsen
Die Positionsbestimmung eines Fahr- auf der geplanten Route konsultiert wer- Fahrzeug-zu-Infrastruktur-Kommunikation
zeugs ist essenziell und setzt eine zuverläs- den. Sie dient somit als elektronischer Ho- Das Testfeld Niedersachsen ermöglicht die
sige, echtzeitfähige Ortungslösung voraus. rizont (electronic horizon) [8]: Die Fahr- Entwicklung von WLAN- und Mobilfunk-ge-
In urbanem Umfeld und in „topografisch he- zeugsensorik liefert Erkenntnisse lediglich stützter Kommunikationstechnik, welche
rausfordernden Gebieten“ erfüllen jedoch zum näheren Umfeld, aber „wie eng ist ei- entsprechend ausgerüsteten Fahrzeugen
GNSS-Verfahren (global navigation satellite gentlich die nächste Kurve dort? Ist mit den Nachrichtenaustausch untereinander
system, globales Navigationssatellitensys- Beeinträchtigungen der Fahrbahnbe- (vehicle-to-vehicle communication, V2V)
tem) allein diese Anforderungen oft nicht schaffenheit zu rechnen und ist der kom- und die Kommunikation mit Infrastruktur-
ausreichend, weswegen die Ortungslösung mende Streckenabschnitt frei von Bau- einrichtungen ermöglicht (vehicle-to-road-
der Fahrzeuge mit ausgeklügelten Interti- stellen?“. Diese Meta-Informationen side communication, V2R bzw. vehicle-to-
aleinheiten und der erwähnten umgebungs- müssen nicht eingebettet in hochgenau infrastructure communication, V2I). In
wahrnehmenden Sensorik erweitert ist [6]. erfasste Straßendaten sein, sondern kön- diesem Anwendungsfall können Infrastruk-
So ein System kann beispielsweise stati- nen als alleinstehende Datenquelle hinzu- turkomponenten (roadside units) den Ver-
sche Elemente wie Fahrstreifenmarkierun- gezogen werden. Mittels Verfahren des kehr beispielsweise über Signalphasen in-
gen, Leitplanken, Pfosten oder Schilder er- Inter-Map-Matchings und der linearen Re- formieren, besondere Ereignisse wie
kennen und deren Positionen relativ zum ferenzierung können sie an beliebig de- freizuhaltende Rettungsgassen kommuni-
Fahrzeug berechnen. Eine mitgeführte, tailliert aufgelöste Straßennetze „gehef- zieren oder Nachrichten über das topogra-
hochgenaue Karte ermöglicht den Abgleich tet“ werden [9]. fische und topologische Layout von
dieser erkannten Objekte gegen eingemes-
sene Objekte, deren absolute Geo-Koordi-
naten nun ebenfalls aus der Karte abgreif-
bar sind. Aus den zuvor berechneten
Objektrelationen und den absoluten Geo-
Positionen kann eine Fahrzeugposition „in
der Karte“ bestimmt werden, die generell
zur Verbesserung der GNSS-Lösung ver-
wendet wird und bei abreißender GNSS-Lö-
sung trotzdem eine Eigenlokalisierung des
Fahrzeugs ermöglicht. Bei diesem als Land-
markennavigation bezeichneten Verfahren
fungiert die mitgeführte Karte also als eine
Art zusätzlicher Sensor. Kritisch ist dabei die
schwer zu gewährleistende Aktualität der
hochgenauen Kartendaten, weswegen diese
Verfahren hauptsächlich in prototypischen
Bild 5: Zur Datenerfassung im Testfeld eingesetzter Sensorträger am Fahrzeug. (Quelle: atlatec GmbH)
Testsystemen genutzt werden. Die Automo-
bilindustrie forscht allerdings akribisch an
der Standardisierung von Verfahren, die zu-
künftigen Fahrzeugen laufend aktuelle Kar-
tendaten für solche Anwendungsfälle bereit-
stellen können sollen. Die benötigten
Geodaten für diesen Anwendungsfall der Ei-
genlokalisierung müssen für leistungs-
schwächere Fahrzeugcomputer schlank ge-
halten werden. Es reichen oft vereinfachte,
diskrete Geometrien im OGC-Simple-Fea-
ture-Modell [7] mit flachen Attributen, wel-
che auch aus einer komplexeren HD-Karte
ableitbar sein müssen. Allerdings ist für die
Selbstlokalisierung des Fahrzeugs eine hohe
innere und äußere Genauigkeit der Karten-
daten erforderlich.
Eine Karte kann zusätzliche, für ein au-
tonomes System relevante Meta-Informa-
tionen bereitstellen, die hilfreich bei der
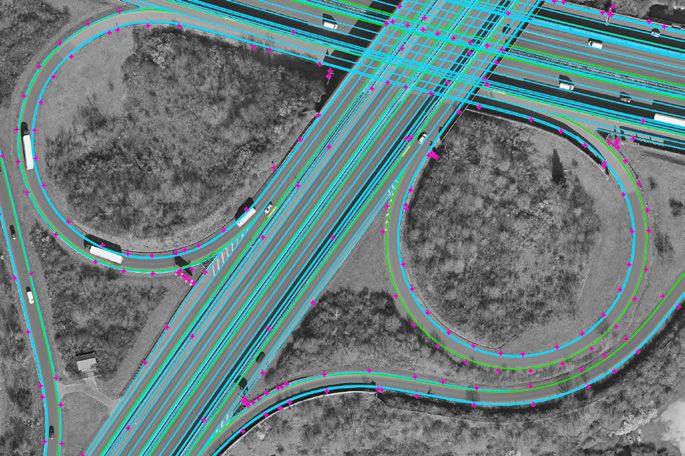
Bild 6: Ausschnitt der HD-Karte im Testfeld Niedersachsen mit Fahrstreifengrenzen (grün, cyan)
Bewegungs- und Verhaltensplanung sind und ausgewählten Infrastrukturobjekten (magenta). (Quelle: DLR, mit Luftbildkarte der Stadt
und zur Bewertung des Straßenzustands Braunschweig)
l
Kartendaten im Testfeld Niedersachsen VDVmagazin 3/21 191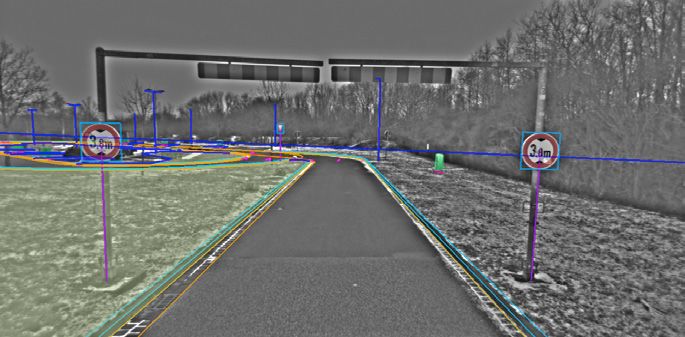
Kreuzungen versenden. Auch hierfür wird Beim Mobile-Mapping-Verfahren wer- den. In der Praxis sind allerdings viele
eine Straßenkarte als statische Datenbasis den Straßenraumdaten von einer an ei- Vermessungsdienstleister spätestens bei
mit hoher Genauigkeit benötigt. nem Vermessungsfahrzeug montierten, der Herleitung semantischer Details und
kalibrierten Erfassungsplattform einge- der durchaus komplexen, logischen Ob-
Vermessung und Aufbereitung der messen. Üblicherweise arbeiten solche jektverknüpfungen einer hochgenauen
Straßendaten im Testfeld Plattformen mit bildgebender Sensorik, Straßenkarte auf eine menschgestützte
Das Institut für Verkehrssystemtechnik meist mit einer Kombination aus Stereo- Objektannotation angewiesen. Im Open-
des DLR in Braunschweig hat in den ver- kameras und LiDAR. Im Testfeld wurde DRIVE-Format kann beispielsweise die
gangenen Jahren viel Erfahrung beim ein vom Dienstleister selbstentwickeltes, Gültigkeit eines Straßenschildes explizit
Aufbereiten heterogener Geodatenba- kompaktes und rein Stereokamera-ba- für lediglich einen Fahrstreifen festgelegt
sen für Simulationsanwendungen sam- siertes Verfahren genutzt, welches eben- werden (Bild 8). Für Simulationsanwen-
meln können [10]. Hauptbestandteil sol- falls die notwendigen Tiefendaten zu den dungen müssen Lichtsignalanlagen an
cher geo-referenzierter Datenbasen sind Bildaufnahmen liefert (Bild 5). Durch eine Kreuzungen zu Signalgruppen zusam-
realitätsnahe Straßenabbilder für die genaue Ortungslösung der Plattform mengefasst oder eine Haltlinie in Bezug
Fahrsimulation, die im Laufe der Zeit werden solche Bildaufnahmen präzise zu einem Stoppschild gesetzt werden.
auch als Basiskarten für Tests in Fahr- georeferenziert, was die spätere Ablei- Für eine KI sind solche — oft formatspe-
zeugen Einzug fanden. Die Akquise sol- tung von Orthofotos und dreidimensio- zifischen — Zuordnungen nicht immer
cher hochgenauen Daten ist allerdings nalen Objekt- und Oberflächeninformati- robust herleitbar. Es herrscht großes
momentan noch sehr komplex, kost- onen entlang der abgefahrenen Strecke Forschungsinteresse an diesen Heraus-
spielig und aufwendig und die Daten ermöglicht. Beim Verfahren von atlatec forderungen. Eine manuelle Annotation
sind in der geforderten Qualität und In- werden Punktmerkmale der digitalisier- oder Korrektur erfolgt mit speziellen 3-D-
formationsfülle selten auf kommunaler ten Objekte aus einem stereoskopischen Editoren direkt in den georeferenzierten
Ebene oder gar frei verfügbar. Für die- Kamerabildpaar rekonstruiert und “die Daten.
sen Zweck hat das DLR den Road2Si-
mulation-Leitfaden veröffentlicht [11], „Die Straßendaten wurden mit 5 cm innerer und
der die Erschließung hochgenauer Stra- 20 cm äußerer Genauigkeit erfasst.“
ßengeodaten für solche speziellen An-
wendungsfälle der Automotive-Domäne Punktkorrespondenz der relevanten Für Forschungsvorhaben wie das
einer breiteren Masse von Datenlieferan- Punkte durch aufwendige Optimierung Testfeld Niedersachsen mit seinen un-
ten ermöglichen soll. Auch im Testfeld sehr genau bestimmt”. Im Idealfall folgt terschiedlichen Anwendungsfällen stellt
Niedersachsen wurde die hochgenaue darauf eine hochautomatisierte Klassifi- sich die Frage nach zu erwartenden Ko-
Straßenkarte nach diesem Leitfaden mit zierung von relevanten Straßenraumob- ordinatenfehlern einer auf diese Weise
allen dort spezifizierten Straßenraumob- jekten wie Fahrstreifenmarkierungen, erstellten Straßenkarte. Sehr hohe äu-
jekten durch den Dienstleister atlatec im Bordsteinkanten und Straßenschildern ßere Genauigkeiten im einstelligen Zen-
Mobile-Mapping-Verfahren „eingefah- mithilfe von KI-Algorithmen (künstliche timeterbereich benötigen ein dichtes
ren“ und als XML-basierter OpenDRIVE- Intelligenz) auf Basis vorher trainierter Passpunktnetz entlang der Strecke, wel-
Datensatz sowie als vereinfachte Referenzdaten (Bild 7). In diesem auto- ches bei klassischer terrestrischer Ver-
Road2Simulation-Datenbasis bereitge- matisierten Prozessierungsschritt können messung die Kosten- und Zeitvorgaben
stellt [12]. Bild 6 zeigt einen Ausschnitt auch die individuellen Objektgeometrien schnell explodieren lässt. Revolutionie-
der HD-Karte. der späteren Straßenkarte generiert wer- ren könnte dies zukünftig eine hochge-
naue, großflächige Passpunkterfassung
mit Fernerkundungsmethoden basie-
rend auf Radarsatellitendaten, wie sie
am Institut für Methodik der Fernerkun-
dung im Verfahren DriveMark® entwi-
ckelt wurde [13]. Diese Passpunkte kön-
nen zur Orthorektifizierung von Bilddaten
und daraus abgeleiteten Straßenraum-
elementen/Landmarken (landmarks) ver-
wendet werden [14]. Im Testfeld Nieder-
sachsen wurde für die Vermessung der
Straßenkarte eine äußere Genauigkeit
von 20 cm oder besser gefordert. Laut
Dienstleister liegt diese statistisch “in
den meisten Fällen” jedoch sogar unter
Bild 7: Klassifizierte Straßenraumobjekte der HD-Karte als bunte Überblendung 10 cm. Aus vermessungstechnischer
georeferenzierter Kameradaten. (Quelle: atlatec GmbH) Sicht mag das ungenau erscheinen, al-
192 l
VDVmagazin 3/21 Kartendaten im Testfeld Niedersachsen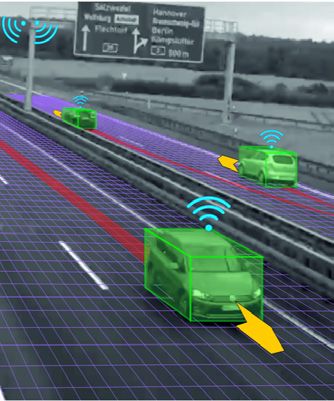
Bild 8: Beispielhafte Querverweise zwischen verschiedenen Elementen eines OpenDRIVE-Datensatzes im XML grün unterstrichen. (Quelle: DLR)
lerdings ist für die skizzierten Anwen- in ähnlicher Magnitude bewegen. Selten konvertiert. Dies ermöglicht einerseits den
dungsfälle selten eine höhere äußere kommen noch manuelle Annotationsfeh- performanten Zugriff durch räumliche In-
Genauigkeit notwendig. Es ist davon ler hinzu. dizierung der OpenDRIVE-Daten — die im
auszugehen, dass selbst autonome For- Testfeldgebiet schnell hundert Megabyte
schungsfahrzeuge mit ihren prototypi- Datenbereitstellung und mehr umfassen — und andererseits
schen Sensorsystemen und Echtzeit-Or- Für die Verteilung der Straßendaten an Be- deren Bereitstellung ebenfalls über WMS
tungslösungen selten höhere äußere teiligte im Testfeld Niedersachsen wird auf und WFS. Allerdings sind für den WFS le-
Genauigkeiten bei einer Objekterken- etablierte Werkzeuge und Schnittstellen diglich standardmäßig vom GeoServer un-
nung auf der Straße erzielen, weswegen der GIS-Domäne zurückgegriffen. Die Da- terstützte Ausgabeformate wie GML,
Kartendaten für den Objektabgleich zur tenhaltung erfolgt in einer PostGIS-Daten- Shapefile, KML, JSON und CSV verfügbar.
Eigenlokalisierung nicht unnötig genau bank und die eigentliche Datenbereitstel- Für eine Ausgabe in OpenDRIVE wurde der
sein müssen und dadurch bei solch ei- lung erfolgt über vom OGC (Open GeoServer vom DLR entsprechend erwei-
nem großflächigen Vorhaben Kosten Geospatial Consortium) standardisierte tert [15]. Auf diese Weise können zugrei-
eingespart werden können. Die Erfah- Dienste WMS (Web Map Service) und WFS fende Applikationen über den WFS weiter-
rung zeigt: Für viele Erprobungsfahrten (Web Feature Service). Hierfür wird Geo- hin standardisiert nach Attributwerten
ist die äußere Genauigkeit der Karte bis- Server als quelloffene Softwarekompo- filtern oder die OpenDRIVE-Ausgabe auf
her ausreichend. Die innere Genauigkeit nente verwendet. GeoServer unterstützt eine räumliche Teilmenge per Bounding
der Daten hängt im Grunde von der Sen- nativ das performante Bereitstellen von Box beschränken.
sorplattform des Mobile-Mapping-Fahr- PostGIS-Geodaten. Die HD-Straßendaten
zeugs und der Datenprozessierung des im Road2Simulation-Datenmodell können Zusammenfassung und Ausblick
Providers ab und ist somit robuster ge- auf diese Weise direkt “mit Bordmitteln” Die skizzierten Anwendungsfälle des Test-
genüber äußeren Einflüssen. Im Testfeld veröffentlicht werden, da sie als Daten- felds Niedersachsen zeigen, dass der ein-
wurde eine innere Genauigkeit von 5 cm bank-Dump in PostGIS geladen werden gedeutschte Begriff “HD-Karte” (von “HD
oder besser gefordert, die laut Dienst- und bereits Tabellen mit Standard-Geome- map” im Englischen) im Sinne von “high
leister innerhalb des Fahrbahnbereichs trietypen enthalten. definition” eher den hohen Detailreichtum
erfüllt wird. Theoretisch liegt die innere Für die Anwendungsfälle, die auf kom- einer zusammenhängenden Straßeninfra-
Genauigkeit für Objekte im direkten Um- plexe OpenDRIVE-Daten mit ihren parame- strukturdatenbasis beschreibt als notwen-
feld des Vermessungsfahrzeugs im Be- trisch spezifizierten Geometrien und ver- digerweise hohe innere und äußere Ge-
reich von einigen Millimetern bis hin zu schachtelten Objektverweisen angewiesen nauigkeiten dieser Daten. Es ist zwar
etwa zwei Zentimetern. Unabhängig von sind, ist ebenfalls eine Bereitstellung über wünschenswert, wenn die Geodaten hohe
den bisher beschriebenen technischen den GeoServer realisiert worden. Dafür Genauigkeiten aufweisen, allerdings ha-
Rahmenbedingungen entstehen bei der werden die ursprünglichen XML-Daten des ben sich Genauigkeiten im Zentimeter- bis
Überführung dieser erfassten Daten in OpenDRIVE-Netzes ebenfalls in PostGIS- niedrigen Dezimeterbereich bereits als zu-
das gewünschte Zielformat Ungenauig- Tabellen überführt und dabei die parame- friedenstellend herausgestellt. In diesem
keiten durch beispielsweise mathemati- trischen Geometrien durch Abtastung in Zusammenhang kann im Kontext der Ent-
sche Kurvenanpassungen, die sich aber diskrete Simple-Feature-Vektorgeometrien wicklung automatisierter und vernetzter
l
Kartendaten im Testfeld Niedersachsen VDVmagazin 3/21 193
Mobilität die für “HD map” im Deutschen OGC Member Meeting - Smart Roads Summit, [11] A. Richter und M. Scholz, „Road2Simulation-
geläufige Übersetzung “hochgenaue Stra- Juni 2020, Online: https://elib.dlr.de/135239. Leitfaden“, Deutsches Zentrum für Luft- und
ßenkarte” irreführend sein beziehungs- [3] iMOVE Australia, „HD maps for automated Raumfahrt e. V. Zenodo, 2019. doi: 10.5281/ze-
driving – literature review“. Jan. 2021, Online: nodo.3375549.
weise falsche Versprechungen wecken.
https://imoveaustralia.com/project/hd-maps- [12] atlatec GmbH, „Clients & success stories:
Aufgrund des aktuell noch hohen Auf- for-automated-driving. German Aerospace Center“. 2021, [Online].
wands für die Erfassung solcher detailreicher [4] DIN, „DIN ISO 5725 Genauigkeit (Richtigkeit Available: https://atlatec.de/german-aero-
Straßendaten, und vor allem durch die und Präzision) von Messverfahren und Messer- space-center-dlr.
schwerfällige “Instandhaltung”, eignen sich gebnissen - Teil 1: Allgemeine Grundlagen und [13] H. Runge, U. Balss, S. Suchandt, R. Klarner,
Begriffe (ISO 5725-1:1994)“, Deutsches Institut und X. Cong, „DriveMark – Generation of high
HD-Straßenkarten primär für Test- und Ent-
für Normung e. V., Nov. 1997. doi:1030/7344872. resolution road maps with radar satellites“,
wicklungszwecke auf dem Weg zum ver- [5] ASAM e. V., „ASAM OpenDRIVE“. 2016, [Online]. Available: https://elib.dlr.
netzten und (hoch-)automatisierten Fahren. Online: https://www.asam.net/standards/detail/ de/105774.
Zukünftige Fahrzeugsysteme werden gänz- opendrive. [14] F. Kurz, T. Krauß, H. Runge, D. Rosenbaum,
lich ohne Karte oder nur mit kleinen, leicht- [6] F. Andert und H. H. Mosebach, „LiDAR SLAM und P. d’Angelo, „Precise aerial image
positioning quality evaluation in urban road orientation using SAR ground control points for
gewichtigen Teilmengen der heute verwen- mapping of urban landmarks“, ISPRS - Interna-
traffic“, in Intelligent transport systems. From
deten HD-Karten zuverlässig funktionieren research and development to the market up- tional Archives of the Photogrammetry, Remote
müssen. Solche Kartenextrakte werden take. INTSYS 2019. Lecture notes of the insti- Sensing and Spatial Information Sciences,
wahrscheinlich schwarmbasiert (crowd- tute for computer sciences, social informatics Bd. XLII-2/W13, S. 61–66, Juni 2019, doi:
and telecommunications engineering, Bd. 310, 10.5194/isprs-archives-xlii-2-w13-61-2019.
sourced) durch sensorisch ausgestattete Se-
A. Martins, J. Ferreira, und A. Kocian, Hrsg. [15] M. Scholz, „High-performance serving of
rienfahrzeuge erfasst und bedürftigen Ver- Springer International Publishing, 2020, large-scale OpenDRIVE datasets using stan-
kehrsteilnehmern kontinuierlich über zentrale S. 277–291. dardized GIS technology“. Presentation at 6th
Systeme „aus der Luft“ bereitgestellt wer- [7] Open Geospatial Consortium Inc., „OpenGIS Symposium Driving Simulation, Nov. 2020,
implementation standard for geographic [Online]. Available: https://elib.dlr.de/136079.
den. Die Kommunikation dieser Daten wird
information – Simple Feature access – Part 1: [16] F. Kurz, S. Azimi, C.-Y. Sheu, und P. d’Angelo,
über standardisierte Schnittstellen der Da- Common architecture“, 2011. Online: „Deep-Learning segmentation and 3D reconst-
tenanbieter oder Fahrzeughersteller und/ https://www.ogc.org/standards/sfa. ruction of road markings using multi-view ae-
oder per Fahrzeug-zu-Infrastruktur-Kommu- [8] J. Ludwig, „Elektronischer Horizont für vor- rial imagery“, ISPRS International Journal of
nikation erfolgen. Die Übergangsphase der ausschauende Kartendaten“, ATZelektronik, Geo-Information, Bd. 8, Nr. 1, Jan. 2019, doi:
Bd. 9, Nr. 7, S. 24–27, Okt. 2014, doi: 10.1365/ 10.3390/ijgi8010047.
Kartendatenerfassung können bildbasierte
s35658-014-0486-5. [17] Bayerischer Rundfunk, „Autonomes Fahren
Fernerkundungsverfahren prägen, die in Ver- [9] R. Ebendt, „A flexibly linkable meta layer of mit Hilfe von Satelliten: HD-Straßenkarten aus
bindung mit einem hohen Automatisierungs- geographic features supplementary for driving dem All“. März 2021, [Online]. Available: https://
grad der Bildprozessierung Teile einer HD- automation and simulation“, in 19th Driving youtu.be/niLEQMWdsBM.
Karte für räumlich ausgedehnte Gebiete in Simulation & Virtual Reality Conference & [18] A. Babu, S. Baumgartner, und G. Krieger,
Exhibition (DSC 2020 europe VR), 2020, „Road surface condition monitoring using fully
kurzer Zeit liefern könnten [16] [17]. Dabei S. 19–26, [Online]. Available: https://elib.dlr. polarimetric airborne SAR data“, Apr. 2021,
bleibt die Gewährleistung der Datenaktuali- de/136011. [Online]. Available: https://elib.dlr.de/133971.
tät allerdings weiterhin eine Herausforde- [10] Deutsches Zentrum für Luft- und Raumfahrt,
rung, wenn auch solche Verfahren kürzere Institut für Verkehrssystemtechnik, „Eine virtu-
elle Welt für ein reales Fahrgefühl“. 2016, [On-
Update-Zyklen als terrestrische Mobile-
line]. Available: https://www.dlr.de/ts/desktop-
Mapping-Befahrungen in Aussicht stellen. default.aspx/tabid-11264/19778_read-46760.
Wo in urbanen Räumen oder kleineren Re-
gionen Drohnen infrage kommen, können
satellitengestützte Verfahren zukünftig an
Bedeutung gewinnen. Dabei kann sogar eine
hohe äußere Genauigkeit erzielt werden,
wenn Landmarken aus Radarmessungen zur
Referenzierung verwendet werden [13]. Luft-
gestützte Radarmessungen eignen sich
ebenfalls zur Erfassung der Fahrbahnbe-
schaffenheit und können so den autonomen
Systemen Meta-Informationen einer zu er-
wartenden Straßenqualität während des
Routings liefern [18].
Dipl.-Geoinf. Michael Scholz Dipl.-Ing. Lennart Asbach
E-Mail: Michael.scholz@dlr.de E-Mail: Lennart.Asbach@dlr.de
Literatur
[1] Deutsches Zentrum für Luft- und Raumfahrt e. Deutsches Zentrum für Luft- und Raumfahrt e.V. (DLR)
V., „Testfeld Niedersachsen für automatisierte Institut für Verkehrssystemtechnik
und vernetzte Mobilität“. 2019, Online:
Lilienthalplatz 7, 38108 Braunschweig, www.dlr.de/ts
https://testfeld-nds.de.
[2] M. Scholz, „Of geodata challenges in Open-
DRIVE standardization“. Presentation at 115th
194 l
VDVmagazin 3/21 Kartendaten im Testfeld Niedersachsen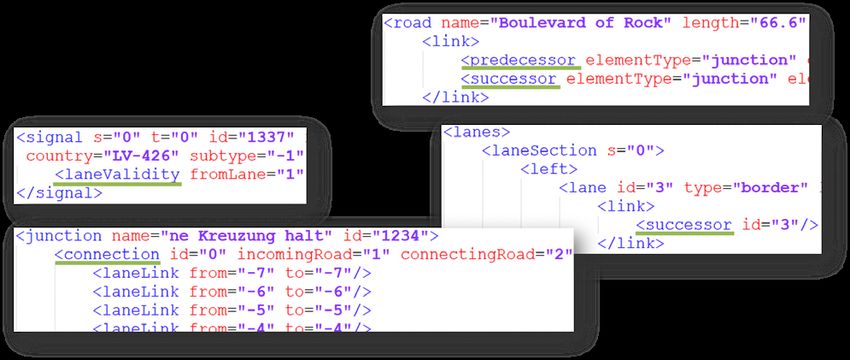
Sie können auch lesen