Maturitätsarbeit - Impuls Mittelschule
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Maturitätsarbeit
Promotion 147b
Titel der Maturitätsarbeit
Der DaVinci Xi in der Ösophagogastrectomie
am St. Claraspital Basel
-
unter Auswertung, Analyse und Vergleich
von Frühresultaten
der mit DaVinci Xi und offen
durchgeführten Ösophagogastrectomie
Autorin
Julia Peter
Gymnasium Unterstrass Zürich
betreuende Lehrperson: Marc Schneider
eingereicht: 07. Januar 2019
1/61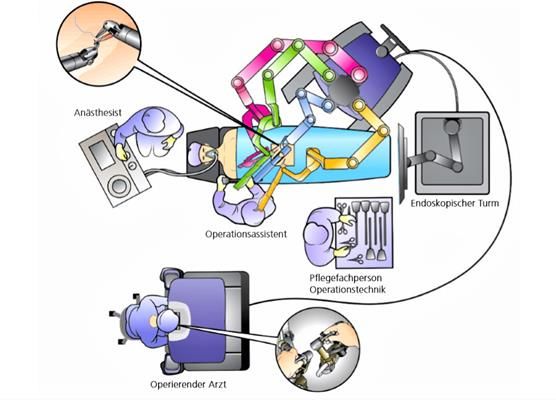
2/61
Inhaltsverzeichnis
1. Vorwort ............................................................................................................................................... 5
2. Einleitung ........................................................................................................................................... 7
3. Der DaVinci Chirurgie-Roboter.................................................................................................. 8
3.1 Allgemeines........................................................................................................................................................ 8
3.2 Die Entwicklung des DaVinci-Systems ................................................................................................ 10
3.3 Aufbau und Anwendung des DaVinci Xi.............................................................................................. 12
3.4 Die Vor- und Nachteile des DaVinci Xi ................................................................................................. 16
3.5 Der Weg des DaVinci Xi-Roboters ans St. Claraspital Basel........................................................ 17
4. Die Speiseröhre ............................................................................................................................ 19
4.1 Allgemeines..................................................................................................................................................... 19
4.2 Die Einteilung des Ösophagus ................................................................................................................. 19
4.3 Die Engstellen des Ösophagus ................................................................................................................ 20
4.4 Der Wandbau des Ösophagus ................................................................................................................. 21
4.5 Die Verschlussmechanismen des Ösophagus ................................................................................... 22
4.6 Der Schluckakt ............................................................................................................................................... 22
5. Die Erkrankungen der Speiseröhre ...................................................................................... 23
5.1 Die benignen Erkrankungen .................................................................................................................... 23
5.2 Die malignen Erkrankungen .................................................................................................................... 24
6. Therapien ....................................................................................................................................... 26
6.1 Allgemeines..................................................................................................................................................... 26
6.2 Die Chemotherapie ...................................................................................................................................... 27
6.3 Die Strahlentherapie ................................................................................................................................... 27
6.4 Die operative Therapie .............................................................................................................................. 28
7. Die Ösophagogastrectomie mit dem DaVinci Xi ............................................................... 29
7.1 Allgemeines..................................................................................................................................................... 29
7.2 Die Vorbereitungsphase ............................................................................................................................ 29
7.3 Der abdominale Teil .................................................................................................................................... 30
7.4 Der thorakale Teil ........................................................................................................................................ 31
7.5 Die Aufräumphase ....................................................................................................................................... 32
8. Die Frühresultate der Ösophagogastrectomie am St. Claraspital .............................. 33
8.1 Einführung ...................................................................................................................................................... 33
8.2 Frühresultate mit DaVinci Xi ................................................................................................................... 33
8.3 Frühresultate ohne DaVinci Xi bzw. offen/konventionell ........................................................... 39
8.4 Vergleich zwischen DaVinci Xi und offener/konventioneller Technik .................................. 43
9. Fazit................................................................................................................................................... 47
Abkürzungsverzeichnis ................................................................................................................................................ 51
Quellen- und Literaturverzeichnis ........................................................................................................................... 52
Glossar .............................................................................................................................................................................. 57
3/61
4/61

1. Vorwort
Da ich Ärztin werden will und technisch interessiert bin, wollte ich meine Maturitätsarbeit zu
einem medizinisch-technischen Thema schreiben.
Als sich meine Grossmutter zur Zeit meiner Maturitätsthemensuche am St. Claraspital Basel ei-
nem viszeralchirurgischen Eingriff zu unterziehen hatte und der Operateur, Prof. Dr. med. Ralph
Peterli, FMH Chirurgie mit Schwerpunkt Allgemeinchirurgie, Traumatologie und Viszeralchirur-
gie sowie Stv. Chefarzt Viszeralchirurgie am St. Claraspital Basel, meiner Grossmutter beim Pati-
entenaufklärungsgespräch mehrere Behandlungsarten vorgestellt hatte, begann ich mich, mit
dem DaVinci auseinanderzusetzen und dabei erkannte ich gleich, dass mich der DaVinci fesselt
und dass ich meine Maturitätsarbeit über ein viszeralchirurgisches Thema mit Bezug zum Da-
Vinci schreiben muss.
Glücklicherweise zeigte sich Prof. Dr. Peterli und das St. Claraspital Basel sehr wohlwollend mei-
ner Idee gegenüber, meine Maturitätsarbeit mit anonymisierten Patientendaten des St. Claraspi-
tals Basel zu verfassen und dabei die Operationsdaten mit und ohne DaVinci zu analysieren und
miteinander zu vergleichen.
Am 18. Juni 2018 durfte ich in Operationsmontur einer zehnstündigen DaVinci Xi-Ösophago-
gastrectomie beiwohnen. Die Operation war sehr interessant und spannend. Im Jahr 2019 werde
ich mit Studentinnen und Studenten der medizinischen Fakultät der Universität Basel an einem
Training auf dem DaVinci-Simulator teilnehmen dürfen.
Ich habe bei meinem Maturitätsarbeitsprojekt ausserordentlich viel gelernt. Diese Erfahrungen
sind für mich sehr, sehr wertvoll. So habe ich im Rahmen meiner Arbeit erste Erfahrungen im
Recherchieren, Zusammentragen, Ordnen und Analysieren von Informationen gesammelt. Dabei
musste ich mir auch eine eigene Meinung bilden. Dies war allerdings nicht ganz einfach, weil mir
zurzeit das medizinische Wissen und die Erfahrung schlicht fehlen. Sehr gut gefiel mir auch der
Kontakt und die Zusammenarbeit mit den Ärzten und den Pflegefachpersonen sowie die Kollegi-
alität unter der Ärzteschaft am Bauchzentrum des St. Claraspitals und auch mir gegenüber. Es
war grossartig, Spitalluft zu schnuppern. Die ganze Arbeit und der Besuch am St. Claraspital Ba-
sel haben mich in meinem Berufswunsch bestärkt.
Herzlich danken möchte ich zunächst Marc Schneider, Lehrer für Biologie, Gymnasium Un-
terstrass Zürich, der mich im Rahmen der Maturitätsarbeit betreute und unterstützte und mir
gleichzeitig grosse Freiheiten in der Bearbeitung meines Themas liess.
5/61Mein besonderer Dank gilt dem St. Claraspital Basel und insbesondere Prof. Dr. Ralph Peterli.
Dank ihres Wohlwollens und ihrer Offenheit wurde es mir erst möglich, meine Idee zu verwirkli-
chen und meine Maturitätsarbeit zu diesem spannenden Thema mit den anonymisierten Patien-
tendaten des St. Claraspitals Basel zu verfassen.
Ganz besonders danke ich Dr. med. Fiorenzo Angehrn, FMH Chirurgie und Oberarzt Viszeralchi-
rurgie am St. Claraspital Basel, welcher mich stets ernst nahm und mich in Verständnis- und
Fachfragen optimal unterstützte.
Herzlichen Dank an alle!
Rüti ZH / Zürich, im Dezember 2018 Julia Peter
6/612. Einleitung
In der vorliegenden Arbeit werde ich erklären, was der DaVinci ist (siehe unten, Ziffer 3.1), wie
er sich entwickelt hat und möglicherweise entwickeln wird (siehe unten, Ziffer 3.2), wie er funk-
tioniert (siehe unten, Ziffer 3.3), welche Vor- und Nachteile er hat (siehe unten, Ziffer 3.4) und
wie er an das St. Claraspital Basel gekommen ist (siehe unten, Ziffer 3.5). Danach werde ich die
Speiseröhre (siehe unten, Ziffer 4), deren Erkrankung (siehe unten, Ziffer 5) und deren Behand-
lungen (siehe unten, Ziffer 6) sowie die Ösophagogastrectomie als spezielle operative Behand-
lungsform (siehe unten, Ziffer 7) beschreiben. Anschliessend werde ich die Frühresultate der
Ösophagogastrectomie mit DaVinci (siehe unten, Ziffer 8.2) sowie offen/konventionell (siehe un-
ten, Ziffer 8.3) auswerten und diskutieren sowie miteinander vergleichen (siehe unten, Ziffer
8.4). Am Schluss werde ich zur Frage Stellung nehmen, ob und allenfalls weshalb der Einsatz des
DaVincis in der Ösophagogastrectomie Sinn macht.
Meine Untersuchung werde ich auf der Basis der anonymisierten Patientendaten des Bauchzent-
rums des St. Claraspitals Basel führen.
In der nachfolgenden Arbeit verwende ich die Kunstbegriffe “PatientIn“ und “PatientInnen“. Da-
mit werden die zwar korrekten, aber etwas umständlichen Begriffe “Patientin und Patient“ (Sin-
gular) und “Patientinnen und Patienten“ (Plural) vermieden und verkürzt wiedergegebenen.
7/613. Der DaVinci Chirurgie-Roboter
3.1 Allgemeines
In den letzten Jahrzehnten wurden sehr grosse Fortschritte in der Medizin erzielt. Einer dieser
Fortschritte betrifft die Weiterentwicklung der technischen Werkzeuge für die interventionelle
Medizin zu computerunterstützten robotischen Systemen. Diese computerunterstützten roboti-
schen Systeme lassen sich in programmierbare Automaten (= Roboter im eigentlichen Sinne)1,
Kamera geführte chirurgische Assistenzsysteme2 und Telemanipulatoren3 unterteilen.
In der Viszeralchirurgie werden keine Roboter im eigentlichen Sinne, sondern entweder Kamera
geführte chirurgische Assistenzsysteme oder Telemanipulatoren eingesetzt.
Sowohl bei der Kamera geführten chirurgische Assistenzsysteme als auch bei den Telemanipula-
toren ist der Mensch der Handelnde.4
Die Telemanipulatoren verfügen über eine Kamera und mindestens zwei Arme mit Instrumen-
ten.5 Sie funktionieren nach dem sogenannten “Master-Slave-Prinzip“, d.h. der Operateur (Mas-
ter) gibt seine Handgriffe über eine Bedienungskonsole ein, die simultan auf ein computerge-
steuertes Instrument (Slave) übertragen werden.6 Im Gegensatz zu den laparoskopischen Instru-
menten verfügen die Telemanipulatoren über 3-D-HD-Kamerasysteme, Tremorfilter und zusätz-
liche interkorporale Freiheitsgrade.7
Der meist verbreitetste Telemanipulator ist das DaVinci-System.8
1 Als Roboter im eigentlichen Sinne gilt ein System, das Aktionen nach einem definierten Programm selb-
ständig/ohne Benutzereingriff ausführt (FEUSSNER, H./OSTLER, D./WILHELM, D., Robotik und “augmented rea-
lity“ – Aktueller Entwicklungsstand und Zukunftsperspektive, in: Chirurg https://doi.org/10.1007/s00104-
018-0697-z [Puplished online: 21.08.2018]; KÜBLER, BERNHARD/SEIBOLD, ULRICH, Aktueller Stand und Entwick-
lung robotergestützter Chirurgie, in: Informationsmanagement und Kommunikation in der Medizin,
Kramme Rüdiger [Hrsg.], Berlin 2017, S. 119). Ca. 1985 wurden in Kalifornien Robodoc, der erste marktfä-
hige Chirurgieroboter zum Fräsen im Bereich der Hüft- und Kniegelenke, und ca. 1995 CASPAR als Kon-
kurrenzsystem zum Robodoc in Deutschland entwickelt. Nachdem in der Anwendung Komplikationen auf-
getreten waren, wurden diese Systeme ab 2003 nicht mehr eingesetzt (siehe zum Ganzen CAETANO DA ROSA,
CATARINA, Operationsroboter in Aktion – Kontroverse Innovationen in der Medizinaltechnik, Dissertation
2012, RWTH Universität Aachen, Bielefeld 2013, und FEUSSNER ET AL., Robotik [Fn. 1]).
2 Beispiele für Kameraführungssysteme sind AESOP, LapMan, Freehand, VIKY und Naviot. Diese Systeme
übernehmen die Kameraführung während eines laparoskopischen Eingriffes (siehe Siemer, S./Stöckle, M.,
Robotische Medizin in Deutschland: quo vadis?, in: Der Urologe 8/2011 S. 928 ff.).
3 Zu den Telemanipulatoren gehört u.a. das DaVinci System (siehe Siemer/Stöckle, [Fn. 2], S. 928).
4 FEUSSNER ET AL., Robotik (Fn. 1); KÜBLER/ SEIBOLD, (Fn. 1), S. 119
5 FEUSSNER ET AL., Robotik (Fn. 1); KÜBLER/SEIBOLD R, (Fn. 1), S. 120
6 FEUSSNER ET AL., Robotik (Fn. 1); KÜBLER/SEIBOLD, (Fn. 1), S. 119; CAETANO DA ROSA, Operationsroboter in Ak-
tion, (Fn. 1), S. 13
7 FEUSSNER ET AL., Robotik (Fn. 1); KÜBLER/SEIBOLD, (Fn. 1), S. 120 f.
8 HIRZINGER, GERD, Minimal invasive Chirurgierobotik in Deutschland – Eine leidvolle Erfolgsgeschichte, in:
Trillium-Report 2010 (1):17
8/61In der Schweiz gibt es zurzeit rund 163 Spitäler mit akutsomatischen Leistungen.9 Hiervon ha-
ben sich 26 Spitäler/Kliniken einen DaVinci-Telemanipulator angeschafft.10
Am St. Claraspital Basel kommt ein DaVinci Xi zum Einsatz. Der DaVinci Xi ist das System der
sechsten Generation.11
Die US-Amerikanische Firma Intuitive Surgical mit Hauptsitz in Sunnyvale,12 ist die Entwickler-
firma der DaVinci-Operationssysteme, 13 welche mittlerweile in der sechsten Generation angebo-
ten werden. 14
Das Operationssystem ist nach dem berühmten Universalgelehrten Leonardo DaVinci benannt.15
Die DaVinci-Systeme sind Telemanipulatoren und operieren minimalinvasiv.16 Sie haben ein
sehr breites Anwendungsspektrum. Sie kommen in der Herzchirurgie, Urologie, Proktologie, all-
gemeinen Chirurgie, Gynäkologie, Kopf- und Hals-Chirurgie, Thoraxchirurgie und Viszeralchirur-
gie zum Einsatz.17
Die weltweite Verteilung der DaVinci Systeme sah 2016 wie folgt aus18:
Land / Kontinent Stückzahl
USA 2‘501
Europa 644
Asien 476
restliche Welt 182
Dieses weltweite Verteilungsverhältnis ist bis heute im Wesentlichen unverändert geblieben.
Hingegen hat sich die Anzahl der sich in Betrieb befindlichen Systeme wesentlich vergrössert. So
sind zurzeit (Stand: 26.12.2018) über 4‘400 Systeme in Betrieb.19 26 dieser Systeme befinden
sich in der Schweiz. Mit dieser hohen Anzahl an DaVinci-Systemen hat die Schweiz die höchste
Dichte an Operationsrobotern weltweit.20
9 BUNDESAMT FÜR GESUNDHEIT. https://www.bag.admin.ch/bag/de/home/zahlen-und-statistiken/zahlen-
fakten-zu-spitaelern/kennzahlen-der-schweizer-spitaeler.html (Stand: 27.12.2018)
10 FAES, ARMIN, Wenn ein Roboter Assistenz-Chirurg wird, in: Kleinbasler Zeitung vom 30./31. 05.2018 S. 5
11 KÜBLER/SEIBOLD, (Fn. 1), S. 119
12 INTUITIVE SURGICAL: INVESTOR FAQS. https://isrg.gcs-web.com/investor-faqs (Stand: 03.12.2018)
13 Trumpfmedical. https://www.trumpfmedical.com/de/uber-uns/presse/pressemitteilungen2/da-vinci-
xi/ (Stand: 18.10.2018)
14 KÜBLER/SEIBOLD, (Fn. 1), S. 121
15 INTUITIVE SURGICAL : Press. https://www.intuitive.com/about-us/press (Stand: 03.12.2018)
16 KÜBLER/SEIBOLD, (Fn. 1), S.121
17 INTUITIVE SURGICAL: SURGEONS. https://www.intuitive.com/healthcare-professionals/surgeons##
(Stand: 18.10.2018)
18 MEES, SÖREN TORGE, Robotik in der Chirurgie: in: BDC Online 01.02.2017 S. 1
19 INTUITIVE SURGICAL: COMPANY. https://www.intuitive.com/about-us/company (Stand: 17.10.2018)
20 FAES, (Fn. 10)
9/613.2 Die Entwicklung des DaVinci-Systems
3.2.1 Die Entstehung
Die Ursprünge der Roboterchirurgie liegen in den 1980er Jahre.21 Nachdem die Telemanipulati-
onssysteme in der Nuklear- und Biotechnik Anwendung gefunden hatten, wollte das amerikani-
sche Verteidigungsministerium die Technologie für seine Bedürfnisse nutzbar machen. Dabei
wurde die Idee verfolgt, verletzte Soldaten nahe am Gefechtsfeld chirurgisch erstzuversorgen,
ohne gleichzeitig den Chirurgen der Gefechts- und Gefahrensituation auszusetzen.22 Aufgrund
dieses Bedürfnisses wurde die Forschung und Entwicklung dieser Roboter vorangetrieben.23
1995 wurde die US Amerikanische Firma Intuitive Surgical gegründet.24 Intuitive Surgical hat
das DaVinci-Roboter-System entwickelt.25
Im März 1997 wurde in Belgien die erste Operation mit einem Prototypen (Mona Lisa) durchge-
führt.26 1999 kam die erste Generation des DaVinci-Operationssystems (DaVinci Surgical Sys-
tem) auf den Markt.27
Dieses System wurde in den USA im Jahre 2000 von der Food and Drug Administration (FDA)
zugelassen.28
Der Roboter Zeus war ihr einziger Konkurrent. Beide stritten sich um Patente. 2003 kaufte Intui-
tive Surgical Zeus auf. Hiermit war der Streit durch Übernahme des Konkurrenten beendeten.
Seitdem hat Intuitive Surgical eine marktbeherrschende Stellung.29 Diese Quasimonopolstellung
führt zu hohen Kosten beim Erwerb und Unterhalt der Geräte.30 Daher sind Konkurrenzpro-
dukte wünschenswert.
3.2.2 Die aktuelle und zukünftige Entwicklungen
Ich habe keine Literatur zur aktuellen und zukünftigen Entwicklung des DaVinci durch Intuitive
Surgical gefunden. Meine diesbezüglichen schriftlichen Anfragen an Intuitive Surgical vom
20.08.2018 und 12.09.2018 blieben unbeantwortet.
21 KÜBLER/SEIBOLD, (Fn. 1), S. 119
22 KÜBLER/SEIBOLD, (Fn. 1), S. 119; Kirchberg J./Mees T./Weitz J., Robotik im Operationssaal - Aus der Nische
in die breite Anwendung, in: Der Chirurg 12 / 2016 S. 1025
23 KÜBLER/SEIBOLD, (Fn. 1), S. 119
24 INTUITIVE SURGICAL: COMPANY, (Fn. 19)
25 KÜBLER/SEIBOLD, (Fn. 1), S. 121
26 MEES, (Fn. 18), S. 1
27 Intuitive Surgical: Company. (Fn. 19)
28 Intuitive Surgical: Company. (Fn. 19)
29 HIRZINGER, (Fn. 8), S. 16 - 17
30 FEUSSNER ET AL., Robotik (Fn. 1), S. 4; HIRZINGER, (Fn. 8), S. 17
10/61ANGEHRN geht davon aus, dass der weiterentwickelte DaVinci zukünftig Strukturen zu erkennen
und dadurch den Operateur zu unterstützen vermag. Möglicherweise wird der DaVinci auch
über die Fähigkeit verfügen, einzelne Teilschritte, wie beispielweise das Knoten, zu automatisie-
ren.
Gemäss ANGEHRN kann die Frage, ob das DaVinci-System sich irgendwann zu einem autonom-
lernenden Roboter entwickeln und den Chirurgen allenfalls ablösen wird, aus heutiger Sicht
nicht verlässlich beantwortet werden. Gemäss ANGEHRN sind die heutigen Chirurgie-Roboter
noch weit von der Autonomie entfernt. Das autonome Operieren ist seiner Meinung nach nicht
nur eine technische Frage, sondern beinhaltet zahlreiche rechtliche Fragen, welche vorab gelöst
werden sollten. Des Weiteren stellt sich gemäss ANGEHRN die sozio-psychologisch-ethische
Frage, ob die Gesellschaft autonom operierende Roboter überhaupt akzeptieren würde. ANGEHRN
stellt heute im Patientenaufklärungsgespräch fest, dass die PatientInnen in der Regel erleichtert
sind, wenn er ihnen erklärt, dass der Roboter nicht selbstständig operiert. ANGEHRN schliesst je-
doch nicht aus, dass es sich in 50 Jahren umgekehrt verhalten wird.31
Gemäss SPEIDEL/BODENSTEDT/MAIER-HEIN/KENNGOTT sowie FEUSSNER/WILHELM wird die Chirur-
gie zukünftig durch technisch-kognitive Systeme ergänzt werden, welche eine operative Situa-
tion erkennen, analysieren, selbständig situationsgerecht handeln und lernen. Dabei soll der
Chirurg nicht ersetzt, sondern mittels kognitiver Assistenz unterstützt werden.32
Dabei erwarten FEUSSNER/WILHELM nicht einen Durchbruch von einzelnen Geräten, wie bei-
spielsweise dem DaVinci. Vielmehr erachten sie eine Neustrukturierung und umfassende In-
tegration des heutigen Operationssaals mit seiner Agglomeration von unterschiedlichsten Ein-
zelgeräten und Instrumenten mit dem Ziel, eine massgeschneiderte Eingriffsumgebung zu
schaffen, welche als Gesamtheit kooperationsfähig wird. 33
31 ANGEHRN, FIORENZO, Interview (unveröffentlicht) Basel, 10.09.2018 (einzusehen bei der Autorin)
32 SPEIDEL, S./BODENSTEDT, S./MAIER-HEIN, L./KENNGOTT, H., Kognitive Chirurgie/Chirurgie 4.0 -Der Weg zur
individualisierten Chirurgie. in: coloproctology 2 2018 S. 114 – 118; FEUSSNER H./WILHELM D, minimalin-
vasive Chirurgie und “robotic surgery“: Chirurgie 4.0?, in Chirurg 2016 87 S. 192
33 FEUSSNER, H./WILHELM, D, minimalinvasive (Fn. 32), S. 192
11/613.3 Aufbau und Anwendung des DaVinci Xi
3.3.1 Allgemeines
Der DaVinci Xi ist das leistungsfähigste, aber nicht das neuste DaVinci-Operationssystem.34 Seine
Anschaffung kostete rund EUR 2‘200‘000. Sein Unterhalt (ohne Personalkosten) kostet rund
EUR 180‘000/Jahr.35
Der DaVinci Xi besteht aus den nachfolgenden drei Einheiten: Konsole, Roboter und Systemwa-
gen.36 (siehe Abbildung 1)
Abbildung 1:Der DaVinci Xi besteht aus drei
Einheiten. Von links nach rechts: Roboter,
Systemwagen, Konsole
Ausserdem ist es möglich, zusätzlich einen speziell für den Roboter angepassten OP-Tisch
(TruSystem 7000dV der Firma Trumpf Medical) zu kaufen. Dieser hat ein Patienten-Positionie-
rungssystem,37 das den Vorteil mit sich bringt, die Position der PatientInnen auf Knopfdruck zu
verändern, ohne die Roboterarme abdocken zu müssen.38 Dadurch kann viel Zeit in der OP ge-
spart werden.39
34 NEW ATLAS. https://newatlas.com/da-vinci-x-surgical-robot/49289/ (Stand: 18.10.2018)
35 EBNER, STEPHAN, Interview (unveröffentlicht), Basel, 17.09.2018 (einzusehen bei der Autorin)
36 INTUITIVE SURGICAL: SYSTEM. https://www.intuitive.com/en/products-and-services/da-vinci/surgical-sys-
tems (Stand: 18.10.2018)
37 KÜBLER/SEIBOLD, (Fn. 1), S. 122
38 TRUMPFMEDICAL. https://www.trumpfmedical.com/de/uber-uns/presse/pressemitteilungen2/da-vinci-
xi/ (Stand: 18.10.2018)
39 KÜBLER/SEIBOLD, (Fn. 1), S. 122
12/613.3.2 Konsole
Die Konsole befindet sich etwas entfernt vom OP-Tisch.40
(siehe unten, Abbildung 5). An ihr nimmt der nichtsterile
Chirurg während der Operation bequem Platz.41 (siehe
links, Abbildung 2)
Mit Hilfe der Konsole steuert er (Master) die durch den Ro-
boter (Slave) auszuführenden Handlungen.
Der Chirurg steuert die Roboter-Arme über zwei Bedie-
nungselemente, welche er mit Daumen und Mittelfinger
führt.42 (siehe Abbildung 3) Die durch den Master ausge-
Abbildung 2: Chirurg an DaVinci Konsole
führten Bewegungen werden exakt und simultan von den
Instrumenten übernommen. Dabei werden Zitterbewegun-
gen der Hand herausgefiltert.43
Mit den Fusspedalen (siehe unten, Abbildung 4) kann er die
Kamera (Endoskop) bewegen,44 zwischen den Instrumen-
Abbildung 3: Steuerknüppel/ Handhaltung ten hin und her wechseln45 und die Geräte unter Strom
am DaVinci Roboter
setzten, um das Gewebe ohne Blutfluss zu durchtrennen.46
Das über eine Kamera aufgenommene Geschehen in der Pa-
tientIn kann der Chirurg an seiner Konsole ohne wahr-
nehmbare Zeitverzögerung verfolgen.47 Dabei hat er für
beide Augen getrennte Bildschirme, wodurch er einen 3D-
Eindruck bekommt.48
Abbildung 4: Fusspedalen DaVinci Roboter
40 SPITAL USTER. Informationen über roboter- unterstützte Operationstechnik mit daVinci®-System.
Uster 2015 S. 3
41 KÜBLER/SEIBOLD, (Fn. 1), S. 121
42 Spital Uster, (Fn. 40), S. 3
43 DIAKONIE KLINIKUM STUTTGART. https://www.diakonie-klinikum.de/leistungsspektrum/kliniken/urolo-
gie/patienteninformation/davinci-operationsroboter.html (Stand: 17.10.2018)
44 KÜBLER/SEIBOLD, (Fn. 1), S. 121
45 VON FLÜE, MARKUS, Aussagen anlässlich der Ösophagogastrectomie vom 28.06.2018
46 SPITAL USTER, (Fn. 40), S. 3
47 KÜBLER/SEIBOLD, (Fn. 1), S. 121
48 KÜBLER/SEIBOLD, (Fn. 1), S. 121
13/61Das Bild ist bis zu 10-fach optisch und bis zu 40-fach digital vergrösserbar.49 Durch diese mas-
sive Vergrösserung können kleinste, von Auge nicht mehr erkennbare Strukturen, wie beispiels-
weise Nervenbahnen, erkannt werden.50 Somit ist eine optimale Präparation möglich.
Die Blickrichtung des Masters ist auf seine Hände gerichtet; allerdings sieht er anstelle seiner
Hände die Instrumente, welche er bedient. 51
3.3.3 Roboter
Der Roboter hat vier Arme, einen Kameraarm und drei Arbeitsarme (siehe oben, Abbildung 1).52
Die Instrumente an den Roboterarmen sind speziell für den DaVinci-Roboter entwickelt und las-
sen sich austauschen.53 Diese Instrumente haben eine Lebensdauer von lediglich zehn Einsätzen.
Danach müssen sie ausgetauscht werden.54
Zu Beginn der Operation werden an der Operationsstelle der PatientIn von Hand Schnitte für die
Trokare gesetzt. Anschliessend werden die Trokare in die Schnittstelle eingefügt. Danach wird
der Roboter über die PatientIn geschoben. Letztlich werden die Instrumente am Ende der Robo-
terarme durch die Trokare in den Körper der PatientIn eingebracht.55
Aufgrund der Instrumentenaufhängung kommen die Roboterarme von oben. Dadurch ist die Pa-
tientIn während der Operation für das OP-Personal gut zugänglich.56 Dies ist wichtig, weil die
Assistenz während der OP immer wieder Instrumentenwechsel vornehmen muss.57
3.3.4 Systemwagen
Der Systemwagen strahlt das Bild, welches durch das Endoskop im Innern der PatientIn aufge-
nommen wird, für das OP-Personal aus, so dass dieses das OP-Geschehen mitverfolgen kann.
Diese Video-Übertragung ist im Gegensatz zum Konsolenbild des Chirurgen (Masters) nicht 3D.
Des Weiteren findet die Kommunikation zwischen dem OP-Personal und dem Roboterchirurgen
49 MEES, (Fn. 18), S. 2
50 RUSZAT, ROBIN/ANGEHRN, FIORENZO, DaVinci - Robotertechnologie am Claraspital – Roboter im Dienst der
Chirurgie, in : ClaraAktuell 53/2015 S. 2
51 KÜBLER/SEIBOLD, (Fn. 1) S. 121
52 EGBERTS, J.-H./ASELMANN, H./HAUSER, C./BERNSMEIER, A./CARSTENS, A./HOECKER, J./BECKER, T., Roboterchirurgie
am Ösophagus, in: Zentralbl Chir 2016; 141, S. 146
53 INTUITIVE SURGICAL: INSTRUMENTS. https://www.intuitive.com/en/products-and-services/da-vinci/instru-
ments (Stand: 28.12.2018)
54 KIRCHBERG, J./MEES, T./WEITZ, J., Robotik im Operationssaal - Aus der Nische in die breite Anwendung, in:
Der Chirurg 12 / 2016 S. 1025 - 1032
55 KÜBLER/SEIBOLD, (Fn. 1), S. 122
56 KÜBLER/SEIBOLD, (Fn. 1), S. 122
57 KÜBLER/SEIBOLD, (Fn. 1), S. 122
14/61aufgrund der Abschottung des Chirurgen über Mikrophon und Lautsprecher statt. Diese befin-
den sich sowohl an der Kopfinnenseite der Konsole als auch auf dem Systemwagen.58
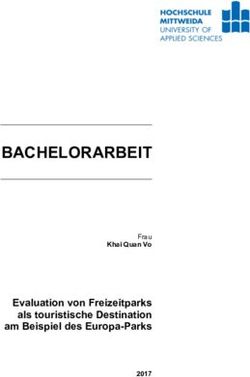
3.3.5 OP-Aufstellung
Aus der Abbildung 5 ist gut ersicht-
lich, wie das OP-Personal über den
Raum verteilt arbeitet, und wo die
einzelnen DaVinci-Einheiten (Kon-
sole, Roboter, Systemwagen und OP-
Tisch) positioniert sind. Sämtliche
DaVinci-Operationssäle sind im We-
sentlichen auf diese Weise struktu-
riert.59
Abbildung 5 DaVinci OP-Saal
3.3.6 Ausbildung zum Konsolenchirurgen
43’000 Chirurgen sind weltweit am DaVinci ausgebildet.60
Ein Konsolenchirurg verfügt als Grundvoraussetzung über ein abgeschlossenes anerkanntes Me-
dizinstudium und über einen Facharzttitel FMH Chirurgie.61 Zusätzlich fordert die Hersteller-
firma Intuitive Surgical ein Minimum an theoretischer und praktischer Weiterbildung; allerdings
gibt es jedoch keinen rechtsverbindlichen Ausbildungslehrplan. Die Ausbildung ist individuali-
siert. Am St. Claraspital Basel beginnt die Konsolenchirurgen-Ausbildung mit der Ausbildung als
DaVinci-Assistenten am Tisch. Hierzu muss eine theoretische Prüfung abgelegt werden. Die prak-
tische Ausbildung erfolgt entweder am Spital durch Instruktoren/Ausbildner von Intuitive Sur-
gical oder am IRCAD62 in Strassburg. Danach erfolgt eine schrittweise Einführung am Tisch. So-
bald der Chirurg am Tisch ausreichend Erfahrung gesammelt hat, beginnt die Ausbildung zum
58 VON FLÜE, (Fn. 45)
59 VON FLÜE, (Fn. 45)
60 INTUITIVE SURGICAL: COMPANY. (Fn. 19)
61 SCHWEIZERISCHE INSTITUT FÜR ÄRZTLICHE WEITER- UND FORTBILDUNG (SIWF).
https://www.fmh.ch/bildung-
siwf/fachgebiete/facharzttitel-und-schwerpunkte/chirurgie.html (Stand: 28.12.2018)
62 Das 1994 in Strassburg gegründete IRCAD (Institut de Recherche contre le Cancer de l’Appareil Digestif
– Institut für Erforschung von Krebserkrankungen des Verdauungstrakts) ist federführend bei der Weiter-
entwicklung der minimal-invasiven Chirurgie. Jährlich kommen rund 5‘500 Chirurgen aus der ganzen
Welt zwecks Weiterbildung ans IRCAD (siehe https://www.alsace.com/de/breves/das-ircad-spitzenchi-
rurgie-auf-weltniveau/ [Stand: 28.12.2018]).
15/61DaVinci-Konsolen-Chirurgen. Diese beinhaltet erneut theoretische Prüfungen. Des Weiteren
wird am DaVinci-Simulator geübt. Am Simulator wird auch die praktische Prüfung absolviert.
Am IRCAD in Strassburg folgen Operationen am lebenden Schwein. Danach erfolgt die Einfüh-
rung an der Konsole schrittweise bei realen Operationen. Dabei arbeitet der angehende Konso-
len-Chirurg an der Zweitkonsole während der erfahrene Konsolenchirurg an der Erstkonsole
sitzt. Ebenso wird mit einfachen Operationen begonnen. Die Patientensicherheit muss jederzeit
gewährleistet sein. Schliesslich kommt der DaVinci nur dann zum Einsatz, wenn sich für die Pati-
entIn dadurch einen Mehrwert ergibt.63
3.4 Die Vor- und Nachteile des DaVinci Xi
3.4.1 Vorteile
Zu den Vorteilen des DaVinci Xi gehören vorab sämtliche Vorteile der minimal-invasiven Chirur-
gie. Diese Vorteile sind: (1.) kleinere Schnitte, (2.) weniger Blutverlust, (3.) ein sinkendes Infekti-
onsrisiko und (4.) ein verkürzter Spital-/Klinik-Aufenthalt.
Der DaVinci hat weitere Vorteile, welche ihn von der nicht Robotersystem unterstützten mini-
malinvasiven Chirurgie abheben. Dies sind: (5.) zitterfreie Umsetzung64 der Handbewegungen,
(6.) die dreidimensionale Bildwahrnehmung und (7.) die verbesserte Detailerkennung65 durch
die bis zu 10-fache optische66 Vergrösserung, weshalb dem Chirurgen eine (8.) präzise Präpara-
tion ermöglicht wird.67
Des Weiteren haben (9.) die Instrumente sieben Freiheitsgrade68. Dies ist ein Gelenk mehr, als
die laparoskopischen Instrumente haben.69 Dadurch sind die Instrumente bewegungsfreier. Dies
macht die (10.) Steuerung intuitiv und natürlich.70 Dies ermöglicht wiederum eine leichtere und
exaktere Präparation.
Ebenso ist (11.) die bequeme Sitzhaltung des Chirurgen gerade bei langen Operationen ein nicht
vernachlässigbarer Vorteil.71 Sie bewahrt den Chirurgen davor, wie bei der herkömmlichen lapa-
roskopischen Operation, während der ganzen Operation stehen zu müssen.
63 ANGEHRN, Interview (Fn. 31)
64 RUSZAT/ANGEHRN, (Fn. 50), S. 1
65 RUSZAT/ANGEHRN, (Fn. 50), S. 2
66 MEES, (Fn. 18), S. 2
67 RUSZAT/ANGEHRN, (Fn. 50), S. 2
68 GILFRICH, CHRISTIAN/GILLITZER, ROLF, DaVinci Operation, in: urology guide (https://www.urology-
guide.com/therapie/davinci-operation/[Stand: 28.12.2018])
69 ANGEHRN, FIORENZO, Interview (unveröffentlicht), Basel, 09.12.2018 (einzusehen bei der Autorin)
70 RUSZAT/ANGEHRN, (Fn. 50), S. 1
71 GILFRICH/GILLITZER, (Fn. 68)
16/61Ein weiterer Vorteil ist (12.) die Funktion der “Firefly Fluoreszenzbildgebung“,72 mit welcher di-
rekt an der Konsole die Durchblutung des Gewebes kontrolliert werden kann.73
Der (13.) mit dem System kombinierbare OP-Tisch ist ein grosser Vorteil des DaVinci Xi gegen-
über seinen Vorgängermodellen.74
Ein weiterer entscheidender Vorteil des DaVinci Xi gegenüber den Vorgängermodellen ist, dass
(14.) alle vier Quadranten im Abdomen ohne Abdocken zugänglich sind. Dies ist vor allem ein
Vorteil für die Viszeralchirurgie, weil dort beim Grossteil aller Operationen in mehreren Quad-
ranten operiert wird.75
3.4.2 Nachteile
Zu den Nachteilen des DaVinci-Systems zählen die (1.) hohen (Operations-)Kosten.76 So kostet
eine DaVinci-Operation rund 1/3 mehr als die gleiche Operation ohne Roboter.77 Da die Grund-
versicherung die Operations-Mehrkosten nicht übernimmt, bleibt das Spital auf diesen unge-
deckten Kosten sitzen. Die Zusatzversicherung übernimmt einen Teil der Mehrkosten für die In-
strumente. Eine Zusatzpauschale gibt es nicht.78
Ebenso wenig sind (2) die Anschaffungs- und Wartungskosten vernachlässigbar. So hat das
St. Claraspital Basel für die Anschaffung des DaVinci Xi rund EUR 2‘200‘000 aufgewendet. Für
den Unterhalt fallen zusätzlich rund EUR 180'000 pro Jahr an.79
Der einzige mögliche Nachteil, welcher die PatientIn bei der DaVinci unterstützten Operation di-
rekt betrifft, ist die (3.) verlängerte Operationszeit. Diese wird durch die genauere Präparation
verursacht.80
3.5 Der Weg des DaVinci Xi-Roboters ans St. Claraspital Basel
Das St. Claraspital Basel kaufte den DaVinci Xi im Januar 2015 für rund EUR 2‘200‘000.81 So
wurde zwar bereits das Vorgängermodell in Paris angeschaut; allerdings entschied sich das Spi-
tal schliesslich gegen die Anschaffung des Vorgängermodells, weil mit diesem Typ nicht in allen
72 DIAKONIE KLINIKUM STUTTGART, (Fn. 43)
73 RUSZAT/ANGEHRN, (Fn. 50), S. 2
74 KÜBLER/SEIBOLD, (Fn. 1), S. 122
75 ANGEHRN, Interview (Fn. 31)
76 UNIVERSITÄTSKLINIKUM DRESDEN. https://www.uniklinikum-dresden.de/de/das-klinikum/kliniken-polikli-
niken-institute/uro/fachinformation/da-vinci-op-roboter (Abruf: 19.10.18)
77 CARYN RABIN, RONI, Questions About Robotic Hysterectomy, iIn: The New York Times vom 26.02.13 S. D4
78 ANGEHRN, Interview (Fn. 31)
79 EBNER, Interview (Fn. 35); FEUSSNER, H., Computerunterstützte Chirurgie – Mehr als nur Robotik!, in co-
loproctology 2 2018 S. 101
80 ANGEHRN, Interview (Fn. 31); FEUSSNER, Computerunterstützte (Fn. 79), S. 101
81 EBNER, Interview (Fn. 35)
17/61vier Quadranten ohne Abdocken operiert werden kann. Der DaVinci Xi hat diese Einschränkung
beseitigt. Deshalb hat sich das St. Claraspital Basel für den DaVinci Xi entschieden.82
Mitte Mai 2015 wurden die ersten Operationen mit DaVinci Xi durchgeführt.83
Der DaVinci Xi wird am St. Claraspital Basel in der Viszeralchirurgie, Urologie und Gynäkologie
verwendet. Vier Chirurgen der Viszeralchirurgie, zwei bis drei Chirurgen der Urologie und ein
Chirurg der Gynäkologie bedienen die Konsole.
Das St. Claraspital Basel ist ein sog. DaVinci-Referenz- und Epizentrum.
Als Referenzzentrum wurde es wegen seiner Fallzahlen und seines breiten Spektrums der Indik-
tionen angefragt.
Die Aufgaben des St. Claraspitals Basel als DaVinci-Referenz- und Epizentrums sind im Wesentli-
chen das Führen einer Datenbank mit den DaVinci-Eingriffen, Aufnahme von Gastärzten zwecks
Weiterbildung, indirekte Beteiligung an der Weiterentwicklung des Systems durch Feedback an
den Hersteller sowie die regelmässige Präsentation seiner Daten im Rahmen von Vorträgen bei
Kongressen.84
82 ANGEHRN, Interview (Fn. 31);
83 RUSZAT/ANGEHRN, (Fn. 50), S. 1
84 EBNER, Interview (Fn. 35),
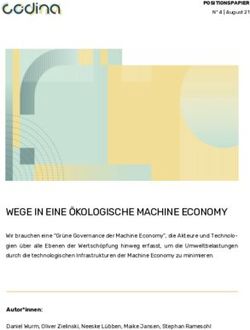
18/614. Die Speiseröhre
4.1 Allgemeines
Die Speiseröhre auch Ösophagus genannt85, zählt zu
den Hohlorganen.86 Sie ist ein etwa 23 bis 28 cm langer
muskulärer Schlauch, der Rachen und Magen mitei-
nander verbindet.87 Die Speiseröhre beginnt auf der
Höhe des 6./7. Halswirbels88 beim Kehlkopf.89 Ihr Ein-
gang wird Ösophagusmund genannt.90 Die Speiseröhre
befindet sich zwischen Luftröhre und Wirbelsäule91.
Sie verläuft entlang der Luftröhre sowie der Aorta
durch den Brustraum, wo sie das Zwerchfell passiert
und im Bauchraum92 auf der Höhe des 10./11. Brust-
wirbels93 in den Magen mündet.94 Sie dient aus-
schliesslich zum Weitertransport von Nahrung und
Abbildung 6: Abbildung der Speiseröhre
Flüssigkeit.95
4.2 Die Einteilung des Ösophagus
Der Ösophagus wird in die nachfolgenden drei Teile unterteilt: kurzer Halsteil, Brustteil und
Bauchteil.
Der kurze Halsteil auch Pars cervicalis genannt,96 beginnt beim Ringknorpel und endet bei der
Kehlgrube. Er ist etwa 4 bis 7 cm lang.97
85 PSCHYREMBEL-KLINISCHES WÖRTERBUCH, 267. neu bearbeitet Auflage, Berlin/Boston 2017, S. 1293
86 LECTURIO. https://www.lecturio.de/magazin/oesophagus/ (Stand: 01.09.2018)
87 MUTSCHLER, ERNST/SCHAIBLE, HANS-GEORG/VAUPEL, PETER, Anatomie, Physiologie, Pathophysiologie des
Menschen, 6. Auflage, Stuttgart 2007, S. 385
88 KIRSCH, JOACHIM/MAY, CHRISTIAN ALBRECHT/LORKE, DIETRICH/WINKELMANN, ANDREAS/SCHWAB, WOLFGANG/HERR-
MANN, GUDRUN/FUNK, RICHARD, Taschenlehrbuch - Anatomie, Stuttgart 2011, S. 337
89 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs/Ösophaguskarzinom – Eine Information der Krebsliga für Be-
troffene und Angehörige, 3. überarbeite Auflage, Bern 2016, S.12
90 KIRSCH ET AL., (Fn. 88), S. 337
91 MUTSCHLER ET AL., (Fn. 87), S.385
92 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89) S. 12
93 KIRSCH ET AL., (Fn. 88), S. 337
94 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89) S. 12
95 MUTSCHLER ET AL., (Fn. 87), S. 386
96 KIRSCH ET AL., (Fn. 88), S. 337
97 VON HACKER, VIKTOR/LOTHEISSEN, GEORG, Chirurgie der Speiseröhre, in: Neue Deutsche Chirurgie, Band 34 ,
Hrsg. von Hermann Küttner, Stuttgart 1926, S. 2
19/61Der längste der drei Abschnitte ist der Brustteil auch Pars thoracica genannt.98 Er beginnt bei
der Kehlgrube und reicht bis zum Zwerchfell. Er ist etwa 14 bis 19 cm lang.99
Der Bauchteil auch Pars abdominalis genannt,100 ist der kürzeste Abschnitt. Er ist ca. 2 bis 4 cm
lang und mündet in den Magen.101
4.3 Die Engstellen des Ösophagus
Der Ösophagus ist nicht, wie früher angenommen, ein zylindrisches Rohr, das konstant den glei-
chen Durchmesser hat. Es gibt drei Engstellen.102 Sie werden die obere Enge, die mittlere Enge
und die untere Enge genannt. 103 Die obere Enge befindet sich auf Höhe des Ringknorpels, die
mittlere Enge auf Höhe der Luftröhrengabelung und die untere Enge auf Höhe des Zwerchfell-
durchtritts.104
Der Durchmesser der Speiseröhre beträgt bei Erwachsenen an den engen Stellen etwa 13 bis
15,5 mm. Da die Speiseröhre sehr dehnbar ist, kann sie sich bis zu 2 cm ausdehnen.105
98 KIRSCH ET AL., (Fn. 88), S. 337
99 VON HACKER/LOTHEISSEN,(Fn. 97), S. 2
100 KIRSCH ET AL.,(Fn. 88), S. 337
101 VON HACKER/LOTHEISSEN, (Fn. 97), S. 2
102 VON HACKER/LOTHEISSEN, (Fn. 97), S. 3
103 KIRSCH ET AL., (Fn. 88), S. 338
104 MUTSCHLER ET AL., (Fn. 87), S. 386
105 VON HACKER/LOTHEISSEN, (Fn. 97), S. 4
20/614.4 Der Wandbau des Ösophagus
Abbildung 7: Querschnitt der Speiseröhre
Die Speiseröhre besteht aus vier verschiedenen Schichten. Die innerste Schicht ist die Schleim-
haut (Tunica mucosa). Sie besteht aus einem mehrschichtigen unverhornten Plattenepithel.
Diese Schicht dient als mechanischer Schutz der Speiseröhre beim Schluckakt.106 Danach kommt
die innere Bindegewebsschicht107 (Tela submucosa)108. Die zweitäusserste Schicht ist eine Mus-
kelschicht (Tunica muscularis). Sie besteht aus einer inneren Ringmuskelschicht und aus einer
äusseren Längsmuskelschicht.109 Im obersten Drittel enthält der Ösophagus ausschliesslich quer
gestreifte Muskulatur. Im mittleren Drittel befinden sich glatte und quer gestreifte Muskeln. Das
unterste Drittel enthält ausschliesslich glatte Muskulatur.110 Die bindegewebige Aussenschicht
(Tunica adventitia)111 sorgt für die freie Beweglichkeit der Speiseröhre während des
Schluckaktes. Ausserdem verlaufen die grossen Versorgungsgefässe, Lymphgefässe und Nerven-
faserbündel in ihr.112
106 KIRSCH ET AL., (Fn. 88), S. 339
107 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 12
108 KIRSCH ET AL., (Fn. 88), S. 339
109 KIRSCH ET AL., (Fn. 88), S. 339
110 MUTSCHLER ET AL., (Fn. 87), S. 386
111 KIRSCH ET AL., (Fn. 88), S. 339
112 LECTURIO, (Fn. 86)
21/614.5 Die Verschlussmechanismen des Ösophagus
Der Ösophagus besitzt an beiden Enden je einen Schliessmechanismus. Sie werden oberer und
unterer Ösophagussphinkter genannt.113
Der obere Ösophagussphinkter ist ein 2 bis 4 cm. langer Bereich, der von der Muskulatur zu-
sammengedrückt wird. Beim Schluckakt öffnet er sich für 1 bis 2 Sekunden, um den Bissen
durchzulassen.114 Er verhindert das ständige Eindringen von Luft in die Speiseröhre.115
Der untere Ösophagussphinkter ist ebenfalls ein Bereich, der von der Muskulatur zusammen-
gedrückt wird. Er befindet sich am Übergang von Ösophagus zum Magen und verhindert den
Rückfluss des Mageninhaltes.116
4.6 Der Schluckakt
Der Schluckakt wird in die nachfolgenden drei Phasen unterteilt: die Vorbereitungsphase, der
Schluckvorgang und die Transportphase.117
In der Vorbereitungsphase wird die zuvor zerkleinerte und mit Speichel angereicherte Nah-
rung von der Zunge gegen den Gaumen gedrückt. Dies löst den Schluckreflex aus, mit dem die
pharyngeale Phase beginnt.118
Während des Schluckvorganges wird der Bissen bis zur Speiseröhre befördert. Um zu verhin-
dern, dass Nahrung während dieses Vorgangs eingeatmet wird, verschliesst sich die Stimmritze
und die Atmung wird für kurze Zeit unterbrochen. Dies geschieht, in dem sich der Kehlkopfde-
ckel über den Eingang der Luftröhre legt.119
In der Transportphase passiert der Bissen den oberen Ösophagussphinkter und landet in der
Speiseröhre.120 Mit Hilfe von Kontraktionswellen wird der Bissen in Richtung Magen befördert,
wo er den unteren Ösophagussphinkter passiert und schlussendlich im Magen landet.121
113 LECTURIO, (Fn. 86)
114 MUTSCHLER ET AL., (Fn. 87), S. 388
115 MUTSCHLER ET AL., (Fn. 87), S. 389
116 MUTSCHLER ET AL., (Fn. 87), S. 389
117 KIRSCH ET AL., (Fn. 88), S. 532
118 MUTSCHLER ET AL., (Fn. 87), S. 388
119 MUTSCHLER ET AL., (Fn. 87), S. 388
120 MUTSCHLER ET AL., (Fn. 87), S. 388
121 MUTSCHLER ET AL., (Fn. 87), S. 389
22/615. Die Erkrankungen der Speiseröhre
Oft haben Erkrankungen der Speiseröhre schwere Folgen. Da die Speiseröhre zum Beispiel eine
sehr wichtige Rolle in der Nahrungsaufnahme spielt, kann es bei ihrer Erkrankung Probleme mit
der Ernährung des Körpers geben. Dies kann unbehandelt bis zum Hungertod führen. Ein weite-
rer Grund für schwere Krankheitsfolgen ist die an andere Organe angrenzende Lage der Speise-
röhre (z.B. Aorta, Herz und Lunge). Diese Nähe kann zur Folge haben, dass sich die Erkrankung
der Speiseröhre auf die anliegenden Organe auswirkt.122 Erkrankungen der Speiseröhre haben
einige Leitsymptome. Dazu gehören Schluckstörungen, Zurückfliessen bereits geschluckter Spei-
sen in den Rachen, Schmerzen hinter dem Brustbein und Gewichtsverlust.123 Die Erkrankungen
der Speiseröhre können in benigne (gutartige) (siehe unten Ziffer 5.1) und maligne (bösartige)
Erkrankungen (siehe unten Ziffer 5.2) unterteilt werden.124
5.1 Die benignen Erkrankungen
Zu den häufigsten benignen (gutartigen) Erkrankungen der Speiseröhre gehören die Diverti-
kelerkrankung, die Achalasie, die Refluxerkrankung, die Hautushernie, die Ösophagusperfora-
tion125 , die Ösophagusvarizen126 und die Ösophagitis.127
Ein Divertikel ist eine Ausbuchtung der Speiseröhre. Diese Ausbuchtung kann an Stellen mit
schwächerer Muskulatur entstehen, wenn sich die Speiseröhre durch lokale Überbelastung so
weit ausdehnt, dass eine Ausbuchtung entsteht.128
Die Achalasie beruht auf einer neuromuskulären Störung im unteren Ösophagus, was zur unko-
ordinierten und fehlerhaften Öffnung des unteren Ösophagussphinkters führt.129
Der Rückfluss von Magensaft wird als Reflux bezeichnet. Diese Erkrankung muss unbedingt be-
handelt werden, da die aggressive Magensäure die Speiseröhrenschleimhaut angreift, was zu
bösartigen Tumoren führen kann.130
122 VON HACKER /LOTHEISSEN, (Fn. 97), S. 1
123 BILLMANN, FRANCK/KECK, TOBIAS, Facharztwissen Viszeral- und Allgemeinchirurgie, Berlin/Heidelberg
2017, S. 3
124 BILLMANN/KECK, (Fn. 123), S. 4 und 10
125 BILLMANN/KECK, (Fn. 123), S.4
126 MUTSCHLER ET AL., (Fn. 87), S. 429
127 PSCHYREMBEL-KLINISCHES WÖRTERBUCH, (Fn. 85), S. 1292
128 STADT ZÜRICH STADTSPITAL TRIEMLI. https://www.stadt-zuerich.ch/triemli/de/index/kliniken_insti-
tute/viszeralchir_thoraxchir_gefaesschir/oberer_oberbauch/speiseroehre.html (Stand: 01.07.2018)
129 MUTSCHLER ET AL., (Fn. 87), S. 429
130 STADT ZÜRICH STADTSPITAL TRIEMLI, (Fn. 128)
23/61Bei der Hautushernie, auch Zwerchfellbruch genannt, sind Teile des Magens durch den Zwerch-
fellspalt des Ösophagus in den Brustraum hochgerutscht.131 Diese Erkrankung wird am St. Cla-
raspital Basel mit dem DaVinci Xi behandelt.132
Ösophagusvarizen sind Krampfadern im Bereich des Ösophagus. Der Schluckakt schädigt die
Krampfadern, was zu einer Ösophagusvarizenblutung führen kann.133
Bei der Ösophagusperforation entsteht ein Loch, das durch alle Schichten der Speiseröhre
geht.134
Die Ösophagitis ist eine Entzündung der Speiseröhrenschleimhaut.135
5.2 Die malignen Erkrankungen
5.2.1 Allgemeines
Zu den malignen (bösartigen) Erkrankungen gehören alle möglichen Krebsarten.
Krebs definiert sich als unkontrollierte Vermehrung von Zellen, welche in das umliegende Ge-
webe eindringen, dieses verdrängen und zerstören. Es besteht auch die Möglichkeit, dass ein-
zelne Zellen sich vom Tumor loslösen, über die Blut- und Lymphbanen in tumorferne Gebiete
des Körpers vordringen und dort Tochtergeschwülste bilden. Diese Tochtergeschwülste werden
als Metastasen bezeichnet.136
Aber wie entsteht überhaupt Krebs? Krebs entsteht durch eine Schädigung am Erbgut. Dies kann
durch Fehler bei der Zellteilung, aber auch durch viele andere Faktoren, wie beispielsweise
übermässiger Nikotin- und Alkoholkonsum, UV-Strahlung oder genetische Faktoren, verursacht
werden.137
131 MUTSCHLER ET AL., (Fn. 87), S. 429
132 PETERLI, RALPH, Interview (unveröffentlicht), Basel, 18.06.2018 (einzusehen bei der Autorin)
133 MUTSCHLER ET AL., (Fn. 87), S. 429
134 BILLMANN/KECK, (Fn. 123), S. 6
135 PSCHYREMBEL-KLINISCHES WÖRTERBUCH, (Fn. 85), S. 1292
136 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 6
137 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 8
24/615.2.2 Der Speiseröhrenkrebs (Ösophaguskarzinom)
Der Speiseröhrenkrebs auch Ösophaguskarzinom genannt138, gehört zu den bösartigen epitheli-
alen Geschwulsten, den Karzinomen.139 Er wird in Plattenepithelkarzinom und in Adenokarzi-
nom unterteilt. Falls das Karzinom keiner dieser Untergruppen zugeordnet werden kann, wird
es als undefinierbares Karzinom benannt.140
Die Plattenepithelkarzinome bilden sich aus den Oberflächenzellen der Speiseröhrenschleim-
haut.141 Sie können in der gesamten Speiseröhre auftreten,142 entstehen jedoch häufiger im obe-
ren Teil der Speiseröhre.143
Die Adenokarzinome entstehen aus Zellen der drüsenhaltigen Schleimhaut.144 Sie treten zu
95 % im unteren Ösophagus auf.145
In der Schweiz erkranken jedes Jahr etwa 380 Männer und 120 Frauen neu an Speiseröhren-
krebs. Die Anzahl der Neuerkrankungen nimmt zu.
Die Krankheit tritt nur sehr selten vor dem 50. Lebensjahr auf. 146
Gemäss aktuellem Wissensstand ist der Speiseröhrenkrebs nicht vererbbar. Jedoch werden fa-
miliäre Häufungen beobachtet. Dies liegt jedoch nicht nur an den gemeinsamen Erbanlagen, son-
dern auch daran, dass Familien ähnliche Lebens- und Essgewohnheiten pflegen.147
Mögliche Risiken für Speiseröhrenkrebs sind starkes Rauchen, regelmässiger Alkoholkonsum,
stark gewürzte Speisen,148 sehr heisse Getränke, mit Schimmelpilz verunreinigte Nahrung,149
über viele Jahre hinweg grosse Belastung durch Röntgen- und Gammastrahlung, Verätzungen
durch bestimmte Chemikalien, die Refluxerkrankung150, die Achalasie151 und Übergewicht.152
138 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89) S. 14
139 MUTSCHLER ET AL., (Fn. 87), S. 116
140 BILLMANN/KECK, (Fn. 123), S. 10
141 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89) S. 14
142 BILLMANN/KECK, (Fn. 123), S. 10
143 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 14
144 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 14
145 BILLMANN/KECK, (Fn. 123), S. 10
146 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 15
147 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 15
148 STADT ZÜRICH STADTSPITAL TRIEMLI, (Fn. 128)
149 MUTSCHLER ET AL., (Fn. 87), S. 439
150 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 14
151 STADT ZÜRICH STADTSPITAL TRIEMLI, (Fn. 128)
152 LEITLINIENPROGRAMM ONKOLOGIE, Deutsche Krebsgesellschaft, Deutsche Krebshilfe, AWMF: S3-Leitlinie Di-
agnostik und Therapie der Plattenepithelkarzinome und Adenokarzinome des Ösophagus, Kurzversion 1.0,
2015, AWMF Registernummer: 021/023OL, http://leitlinienprogramm-onkologie.de/Leitlinien.7.0.html
(Stand: 27.12.18), S.17
25/61Häufig verläuft Speiseröhrenkrebs sehr lange symptomlos. Dies ist problematisch, weil der
Krebs deshalb oft erst in einem fortgeschrittenen, kaum mehr heilbaren Stadium diagnostiziert
wird.153 Bei Speiseröhrenkrebs ist die Prognose schlecht. Er ist die sechsthäufigste krebsbe-
dingte Todesursache. Lediglich 15 bis 25 % der PatientInnen überleben die 5-Jahresgrenze.154
Die Symptome bei Speiseröhrenkrebs sind: ungewollter Gewichtsverlust, Schmerzen hinter dem
Brustbein, Bluterbrechen, Teerstuhl, Blutarmut,155 Schluckbeschwerden, schmerzhafte Krämpfe
der Speiseröhre und häufiges Aufstossen.156
6. Therapien
6.1 Allgemeines
Bei Speiseröhrenkrebs gibt es zahlreiche Behandlungsformen. Die hauptsächlichen Verfahren
sind: Chemotherapie (siehe unten, Ziffer 6.2), Strahlentherapie (siehe unten, Ziffer 6.3) und ope-
rative Therapie (siehe unten, Ziffer 6.4). Oft werden diese Behandlungsmöglichkeiten kombi-
niert, um den Tumor effizient zu entfernen.157
Bei der Therapie wird zwischen neoadjuvanter und adjuvanter Therapie unterschieden.
Die neoadjuvante Therapie erfolgt vor der Operation.158 Sie besteht meist aus einer Radioche-
motherapie.159 Ihr Ziel ist es, den Tumor zu verkleinern, und somit die Ausgangssituation für die
Operation zu verbessern.160 Die optimale Zeitspanne zwischen Operation und Abschluss der
Vorbehandlung liegt bei 6 bis 8 Wochen.161
Die adjuvante Therapie ist die Behandlung, welche nach der Operation folgt.162 Hierbei wird
meist eine Chemotherapie gemacht.163 Ihr Ziel ist es, die im Körper zurückgebliebenen Krebszel-
len zu zerstören.164
153 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 15
154 ANGEHRN, FIORENZO/BOLLI, MARTIN/VON FLÜE MARKUS, Ösophaguskarzinom - Frühe Diagnose und individu-
elle Nachsorge, in: In: Hausarzt Praxis 2018 Vol. 13 Nr. 9 S. 2; siehe auch unten, Ziffer 8.3.3.4.
155 BILLMANN/KECK, (Fn. 123), S. 11
156 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 15
157 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 23
158 PSCHYREMBEL-KLINISCHES WÖRTERBUCH, (Fn. 85), S. 1237
159 Anonymisierte Patientendaten des SCS mit DaVinci Xi und offen/konventionell
160 PSCHYREMBEL-KLINISCHES WÖRTERBUCH, (Fn. 85), S. 1237
161 ANGEHRN/BOLLI/VON FLÜE, Ösophaguskarzinom (Fn. 154), S. 3
162 PSCHYREMBEL-KLINISCHES WÖRTERBUCH, (Fn. 85), S. 26
163 Anonymisierte Patientendaten des SCS mit DaVinci Xi und offen/konventionell
164 PSCHYREMBEL-KLINISCHES WÖRTERBUCH, (Fn. 85), S. 26
26/616.2 Die Chemotherapie
Die Chemotherapie ist ein Sammelbegriff für Medikamente, welche zur Bekämpfung von Krebs
eingesetzt werden.165 Die Medikamente werden in mehreren Zyklen verabreicht. Dabei wird
zwischen den Zyklen eine Pause von einigen Tagen eingelegt.166 Sie können der PatientIn mit ei-
ner Infusion, einer Spritze, Tabletten, Kapseln, Dragees, Suspensionen oder Cremes verabreicht
werden.167 Die Medikamente verteilen sich über die Blutbahnen im ganzen Körper.168 Somit wir-
ken sie nicht lokal, sondern im ganzen Organismus.169 Die bei einer Chemotherapie verabreich-
ten Medikamente haben den Überbegriff Zytostatika. Es gibt davon über hundert.170 Meist wird
nicht nur eine Zytostatika, sondern mehrere der PatientIn verabreicht. So werden die Krebszel-
len in verschiedenen Phasen gestört.171 Zytostatika wirken zellschädigend oder wachstumshem-
mend. Das soll die schnellteilenden Krebszellen daran hindern, sich zu teilen. Nachteilig ist je-
doch an diesen Medikamenten, dass auch schnellteilende gesunde Zellen geschädigt werden.172
So entstehen Nebenwirkungen. Welche Nebenwirkungen auftreten und wie stark diese sind,
hängt vom Medikamententyp, der Medikamenten-Kombination, der Dosierung und der individu-
ellen Empfindung ab. Zu den möglichen Nebenwirkungen gehören: Veränderungen des Blutbil-
des, Übelkeit und Erbrechen, Magen-/Darmbeschwerden, Nervenstörungen, trockene Schleim-
häute, Sinnesstörungen, schmerzhafte Rötungen und Schwellungen an Händen und Füssen,
Haarausfall,173 Hautirritationen, Abnahme oder Verlust der Fruchtbarkeit und Zeugungsfähigkeit
und die vorübergehende oder langfristige Abnahme der Leistungsfähigkeit von Herz und Lunge.
174 Diese Nebenwirkungen können mittels komplementär medizinischen Präparaten etwas ge-
lindert werden.175
6.3 Die Strahlentherapie
Die Strahlentherapie, auch Radiotherapie genannt, ist ebenfalls ein Mittel der Krebsbekämp-
fung.176 Sie wird lokal angewendet.177 Der Tumor und die umliegenden Lymphknoten werden
165 KREBSLIGA SCHWEIZ, Medikamentöse Tumortherapien/Chemotherapien und weitere Medikamente – Eine
Information der Krebsliga für Betroffene und Angehörige, 3. überarbeitete Auflage, Bern 2018, S. 18
166 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 26
167 KREBSLIGA SCHWEIZ, Chemotherapie, (Fn. 165), S. 31
168 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 25
169 KREBSLIGA SCHWEIZ, Chemotherapie, (Fn. 165), S. 11
170 KREBSLIGA SCHWEIZ, Chemotherapie, (Fn. 165), S. 18
171 KREBSLIGA SCHWEIZ, Chemotherapie, (Fn. 165), S. 19
172 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 25
173 KREBSLIGA SCHWEIZ, Speiseröhrenkrebs, (Fn. 89), S. 26
174 KREBSLIGA SCHWEIZ, Chemotherapie, (Fn. 165), S. 19
175 KREBSLIGA SCHWEIZ, Chemotherapie, (Fn. 165), S. 16
176 KREBSLIGA SCHWEIZ, Strahlentherapie/Radiotherapie – Eine Information der Krebsliga für Betroffene und
Angehörige, 10. überarbeitete Auflage, Bern 2018, S. 11
177 KREBSLIGA SCHWEIZ, Chemotherapie, (Fn. 165), S. 11
27/61Sie können auch lesen