Projektarbeit Ausarbeitung der rechtlichen Lage von autonomen Fahrzeugen und Untersuchung von Szenarien mit Handlungsempfehlungen
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Projektarbeit Ausarbeitung der rechtlichen Lage von autonomen Fahrzeugen und Untersuchung von Szenarien mit Handlungsempfehlungen im Studiengang TAB4 unter der Leitung von Prof. Dr. Ralf Wörner vorgelegt von Nico Ewelt Mat.-Nr.: 754475 Nico Gelhausen Mat.-Nr.: 755060 Micha Kümmerle Mat.-Nr.: 754377 Mark Roos Mat.-Nr.: 754717 Am 15.06.2018 an der Hochschule Esslingen
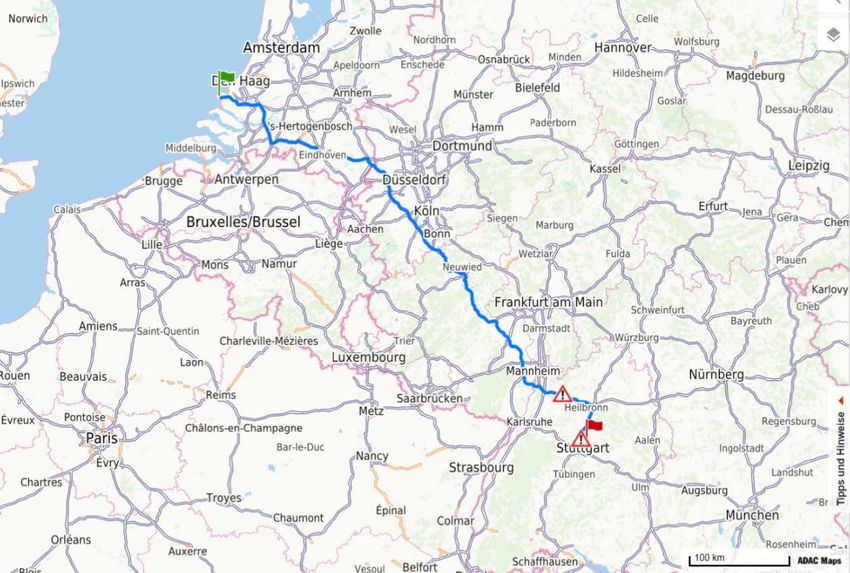
Kurzfassung 2 Kurzfassung Im Studiengang TAB4 ist ein Projekt zu absolvieren, welches sich aus einer Gruppe von 4 Studierenden zusammensetzt. Wir wählten das Thema „B2 – Bewertung Nutzungsszenarien für autonom fahrende LKWs: Anwendungsfelder und Erwartungshaltungen durch Verkehrsraumteilnehmer“. Der Projekttitel hat sich dann zu dem auf dem Deckblatt zu findenden entwickelt. Wir hatten nach einem Gespräch mit Prof. Dr. Wörner einen Teamleiter zu bestimmen, in unserem Fall Nico Gelhausen, sowie die Aufforderung erhalten unsere Aufgabenteilung, Herangehensweise und Organisation selbst einzuteilen. Es ist ein sehr spannendes Thema, welches uns das ganze Semester über beschäftigt hat. Die Projektarbeit lief in Kooperation mit der Projektgruppe B1, welche sich ausschließlich auf die technischen und infrastrukturellen Komponenten des konkreten Use-Cases der Strecke Stuttgart – Rotterdam konzentrierten. Bei der Betrachtung der rechtlichen Rahmenbedingungen des autonomen Fahrens in Deutschland und der Niederlande fällt schnell auf, dass die vorläufige Situation unvorbereitet erscheint. Sowohl auf internationaler als auch auf den nationalen Ebenen sind Rahmenbedingungen nicht ausgereift und werden bisher auch nur zögerlich vorangetrieben. Auffällig ist, dass neue oder noch laufende Gesetzesänderungen fast ausschließlich nur für vollautomatisierte Fahrzeuge bis Level 4 definiert werden. Damit erscheint das autonome Fahren im Sinne einer Level 5 Nutzung legislativ noch in weiter Ferne. Daher entwickelte sich unsere Aufgabe schnell in die Richtung, Handlungsempfehlungen rechtlicher Art aus der Sicht von Nicht-Juristen zu formulieren. Zu diesem Zwecke soll eine Verdeutlichung anhand von zwei Streckenszenarien erfolgen, welche durch eine Analyse teils den technischen und infrastrukturellen Bereich mit abdecken und so ein anschauliches Beispiel zur Lage und Aussicht in der Legislative bieten. Dabei liegt das Augenmerk auf der länderübergreifenden Betrachtung im Sinne des Use-Cases. Unsere Industriepartner Herr Kok von der Daimler AG, Herrn Lennart Schultz von der ACATECH sowie Herrn Heisig und Herrn Dröge von der Volkmann und Rossbach GmbH & Co. KG standen uns mit Rat und Tat zur Seite. Regelmäßige Treffen mit ihnen sowie mit Professor Dr. Ralf Wörner an der Hochschule Esslingen lieferten einen stetigen Abgleich. Ein Highlight war die Demonstration des Mercedes-Benz Actros mit Highway Pilot und einer Demonstrationsfahrt auf der B14 am 30.04.2018. Schlagwörter: Autonomes Fahren, Infrastruktur, Recht, Handlungsempfehlungen, Haftung, Datenschutz, Projektarbeit

Abstract 3 Abstract In our current semester TAB4 we have to complete a project in a group of four. We chose the topic “B2 – Evaluation Usage Scenarios for Autonomous Driving Trucks: Application Fields and Expectations by Traffic Participants”. The project title quickly evolved to the one on the cover. After first conversation with Prof. Dr. Wörner we chose Nico Gelhausen to be our group leader. The project work was carried out in cooperation with the project group B1, which focused exclusively on the technical and infrastructural components of the concrete use- case Stuttgart – Rotterdam. Considering the current legislative framework conditions of autonomous driving in Germany, the Netherlands and international law it quickly becomes apparent that the situation seems to be unprepared. It is also noticeable that new or ongoing legal changes are almost exclusively defined only for vehicles up to level 4 automatization. So far, the autonomous driving in the sense of a level 5 automatization seems to be in the distant future. Thus our task developed to formulate legal recommendations from the point of view of non-lawyers. For this purpose, a clarification is to be made on the basis of two scenarios concerning technical and infrastructural dimensions. Our partners Mr. Kok from the Daimler AG, Mr. Lennart Schultz from the Acatech, Mr. Heisig and Mr. Dröge from Volkmann und Rossbach GmbH & Co. KG assisted our work with ambition as well as our professor Prof. Dr. Wörner. A highlight was the demonstration of the Mercedes-Benz Actros equipped with the Highway Pilot system and the demonstration drive on the B14 at April 30, 2018. Keywords: autonomous driving, infrastructure, law, recommendations, liability, data protection, project work

Inhaltsverzeichnis 4 Inhaltsverzeichnis Kurzfassung ................................................................................................................................... 2 Abstract ......................................................................................................................................... 3 Inhaltsverzeichnis .......................................................................................................................... 4 Abkürzungsverzeichnis .................................................................................................................. 6 Abbildungsverzeichnis................................................................................................................... 9 Tabellenverzeichnis ..................................................................................................................... 10 1. Definitionen............................................................................................................................. 11 2. Allgemeine rechtliche Situation .............................................................................................. 12 2.1 Völkerrecht ........................................................................................................................ 12 2.1.1 Wiener Übereinkommen über den Straßenverkehr .................................................. 12 2.1.2 ECE-Regelungen ......................................................................................................... 14 2.2 Europarecht ....................................................................................................................... 16 2.2.1 Europäisches Zusatzabkommen zum Übereinkommen zum Straßenverkehr ........... 18 2.2.2 Amsterdamer Erklärung ............................................................................................. 19 2.3 Nationale Gesetze – Deutschland ..................................................................................... 19 2.3.1 Straßenverkehrsordnung (StVO) ................................................................................ 19 2.3.2 Straßenverkehrs-Zulassungs-Ordnung (StVZO) ......................................................... 20 2.3.3 Straßenverkehrsgesetz ............................................................................................... 21 2.3.4 Haftung....................................................................................................................... 22 2.3.5 Datenschutz ............................................................................................................... 25 2.3.6 Testfahrzeugzulassung ............................................................................................... 29 2.3.7 Versuchsfelder ........................................................................................................... 30 2.3.8 Autonomous Vehicle Readiness Index – Deutschland ............................................... 31 2.4 Niederlande ....................................................................................................................... 32 2.4.1 Nationale Gesetzeslage .............................................................................................. 32 2.4.2 Versuchsfelder ........................................................................................................... 34 2.4.3 Autonomous Vehicle Readiness Index ....................................................................... 35 2.5 Fazit ................................................................................................................................... 36 2.6 Ausblick – Bericht der Ethikkommission ........................................................................... 37 3. Allgemeine Situation zur Infrastruktur.................................................................................... 41 3.1 Vergleich Verkehrszeichen ................................................................................................ 42 3.2 Straßenmarkierungen ....................................................................................................... 45 3.2.1 Autobahnen in Deutschland ...................................................................................... 47 3.2.2 Unterschiede Straßenmarkierungen .......................................................................... 50 3.3 Lichtsignalanlagen ............................................................................................................. 52
Inhaltsverzeichnis 5 3.4 Völkerrechtliche Hintergründe zu Straßenverkehrszeichen, Straßenmarkierungen und Lichtsignalanlagen ................................................................................................................... 53 3.4.1 Wiener Übereinkommen über Straßenverkehrszeichen ........................................... 53 3.4.2 Europäisches Zusatzabkommen zum Übereinkommen über Straßenverkehrszeichen ............................................................................................................................................. 55 3.5 Arbeitsstellen .................................................................................................................... 55 3.5.1 Richtlinien für die Sicherung von Arbeitsstellen an Straßen (RSA) ............................ 55 3.5.2 Baustellenverordnung ................................................................................................ 60 4. Vorstellung der Situationen .................................................................................................... 61 4.1 Der Use-Case Rotterdam – Stuttgart ................................................................................ 62 4.2 Positionszuordnung + Roboter vs. Umfeld........................................................................ 64 4.2.1 Notwendigkeit von Redundanzen .............................................................................. 67 4.2.2 Anpassungsbedarf Infrastruktur ................................................................................ 73 4.2.3 Empfehlungen ............................................................................................................ 76 4.3 Mobile Baustellen + Szenario Mischbetrieb – Fahrer vs. Roboter .................................... 78 4.3.1 Beschreibung des Videos ........................................................................................... 78 4.3.2 Betrachtung der Infrastruktur .................................................................................... 79 4.3.3 Betrachtung der Technik ............................................................................................ 83 5. Fazit ......................................................................................................................................... 88 6. Anhang .................................................................................................................................... 91 6.1 Reiner Scharrer, Autobahndirektion Südbayern ............................................................... 91 6.2 Falk Ehrlich, Regierungspräsidium Stuttgart, Referat 46.1 - Verkehr ............................... 93 7. Selbständigkeitserklärung ....................................................................................................... 95

Abkürzungsverzeichnis 6 Abkürzungsverzeichnis 3D 3 Dimensionen A9 Autobahn 9 ABS Anti-Blockiersystem Abs. Absatz ACC Adaptive Cruise Control ACSF Automatically Commanded Steering Function AG Aktiengesellschaft ASIL Automotive Saftey Integrity Level B14 Bundesstraße 14 BAB Bundesautobahn BaustellV Baustellenverordnung BDSG Bundesdatenschutzgesetz BfDI Bundesbeauftragter für Datenschutz und Infrastruktur BFU Bundesstelle für Flugunfalluntersuchung BGB Bundesgesetzbuch BMVI Bundesverkehrsministerium Bzgl. Bezüglich Bzw. Beziehungsweise Ca. Circa Car2X, V2X Fahrzeug zu Umgebung Co. Compagnie D.h. Das heißt DBS Digital Business Solutions DIN Deutsche Industrienorm Dr. Doktor e.V. eingetragener Verein E-Call Emergency Call ECE-Regelungen Regelungen der Wirtschaftskommission für Europa der Vereinten Nationen Etc. Et Cetera EU Europäische Union EU-DSGVO EU-Datenschutz-Grundverordnung F Folgende
Abkürzungsverzeichnis 7 F&E Forschung und Entwicklung Ff. Fortfolgende GLONASS russisches Globales Satellitennavigationssystem GmbH Gesellschaft mit beschränkter Haftung GNSS globales Navigationssatellitensystem GPS Global Positioning System HD High Definition Hg. Herausgeber Hr. Herr ISO Internationale Organisation für Normung KBA Kraftfahrt-Bundesamt-Ordnung KG Kommanditgesellschaft Km Kilometer Km/h Kilometer pro Stunde, Angabe einer Geschwindigkeit LKAS Lane Keeping Assistant LKW Lastkraftwagen LTE Long Term Evolution Min Minuten Mm Millimeter Mr. Mister PKW Personenkraftwagen ProdHaftG Produkthaftungsgesetz Prof. Professor R79 Regelung in ECE RL 2007/46/EG Richtlinie 2007/46/EG RMS Richtlinien für die Markierung von Straßen RSA Richtlinien für die Sicherung von Arbeitsstellen an Straßen RTTI Real Time Traffic Information S. Seite SDCU Safety Domain Control Unit StVG Straßenverkehrsgesetz StVO Straßenverkehrsordnung StVZO Straßenverkehrszulassungsordnung TMC Traffic Message Channel TU Eindhoven Technische Universität

Abkürzungsverzeichnis 8 TÜV Technischer Überwachungsverein UMTS Universal Mobile Telecommunications System UN United Nations UNECE Wirtschaftskommission für Europa URL Uniform Resource Locator USA United States of America Usw. Und so weiter V2I Kommunikation Vehicle to Infrastructure V2V Kommunikation Vehicle to Vehicle VAF Vollautomatisiertes Fahren VDA Verbund der Automobilindustrie W-LAN Wireless Lan WVW Wegenverkeerswet XML Extensible Markup Language Z.B. Zum Beispiel ZFZR Zentrale Fahrzeugregister

Abbildungsverzeichnis 9 Abbildungsverzeichnis Abbildung 1: Auszug aus dem StVG .............................................................................. 21 Abbildung 2: Platzierung Deutschlands im Index .......................................................... 32 Abbildung 3: Rangprinzip .............................................................................................. 32 Abbildung 4: Platzierung von den Niederlanden im Index ........................................... 36 Abbildung 5: Timeline mit wichtigsten Daten ............................................................... 37 Abbildung 6: Rangfolge der Vorfahrtseinrichtungen in Deutschland ............................ 41 Abbildung 7: Rangfolge der Vorfahrtseinrichtungen in den Niederlanden .................... 41 Abbildung 8: Unsachgemäße Markierung ...................................................................... 46 Abbildung 9: Undurchsichtige Markierung .................................................................... 47 Abbildung 10: Aufbau einer Autobahn .......................................................................... 50 Abbildung 11: Lichtsignalanlage mit Rundumgrün-Hinweis in Groningen .................. 53 Abbildung 12: Verkehrszeichen 123 Abbildung 13: Verkehrszeichen 1004.............. 56 Abbildung 14: Beispielregelplan für Autobahn .............................................................. 58 Abbildung 15: Ausbau des autonomen Fahrbetriebs Hafen Rotterdam ......................... 63 Abbildung 16: Route von Stuttgart nach Rotterdam ...................................................... 64 Abbildung 17: Verunfalltes Tesla Model X auf dem Highway 85 ................................. 65 Abbildung 18: Screenshots aus dem Beispielvideo; Links Bild 1, Mitte Bild 2, Rechts Bild 3 ........................................................................................................ 65 Abbildung 19: Luftperspektive des Fahrwegs ................................................................ 66 Abbildung 20: Bordsensorik des Tesla Model X............................................................ 67 Abbildung 21: Kommunikationskanäle von autonomen Fahrzeugen............................. 68 Abbildung 22: LTE Abdeckung Deutschland ................................................................ 75 Abbildung 23: LTE Abdeckung in den Niederlanden .................................................... 76 Abbildung 24: Screenshots aus Beispielvideo ................................................................ 79
Tabellenverzeichnis 10 Tabellenverzeichnis Tabelle 1: Vergleich von Verkehrszeichen ..................................................................... 42 Tabelle 2: Anteil gleicher Schilder ................................................................................. 43 Tabelle 3: Vergleich der Beschilderung auf Autobahnen ............................................... 44 Tabelle 4: Unterschiede autobahnrelevanter Verkehrszeichen ....................................... 44 Tabelle 5: Markierungsarten auf Autobahnen ................................................................ 47 Tabelle 6: Unterschiede von Straßenmarkierungen ........................................................ 50 Tabelle 7: Beanspruchungsklassen für Markierungsstreifen .......................................... 80 Tabelle 8: Klassen für Radüberrollungen ....................................................................... 81
1. Definitionen 11 1. Definitionen Situation: Der Ausdruck Situation umfasst die Rahmenbedingungen, vor die jemand oder unter die ein Vorhaben oder eine Sache gestellt wird. Außerdem bezeichnet das Wort Situation die Lage oder Position, die Gebundenheit an Gegebenheiten oder Umstände. Streckenszenario: Konkretisierte Beschreibung einer Fahrsituation, ausgehend aus der Verbindung von zwei oder mehr Szenarien nach Hr. Rahmani; eigene Definition. Szenario: „Beschreibung, Entwurf, Modell der Abfolge von möglichen Ereignissen oder der hypothetischen Durchführung einer Sache“ 1; Hier bezugnehmend auf das Ergebnispapier von Hr. Rahmani. Use-Case: Use Cases dokumentieren die Funktionalität eines geplanten oder existierenden Systems auf Basis von einfachen Modellen. In einem Use Case, auch Anwendungsfall genannt, wird das nach außen sichtbare Verhalten eines Systems aus Sicht der Nutzer beschrieben. Vollautonomes Fahren: Das System übernimmt das Fahrzeug vollständig vom Start bis zum Ziel; alle im Fahrzeug befindlichen Personen sind nur Passagiere. Dabei handelt es sich um die Automatisierungsstufe 5. 1 Dudenredaktion (o. J.): „Szenario“ auf Duden online. URL: https://www.duden.de/rechtschreibung/Szenario (Abrufdatum: 09.04.2018)
2. Allgemeine rechtliche Situation 12 2. Allgemeine rechtliche Situation 2.1 Völkerrecht 2.1.1 Wiener Übereinkommen über den Straßenverkehr Das Wiener Abkommen über den Straßenverkehr ist ein völkerrechtlicher Vertrag unter dem Dach der Vereinten Nationen. Er bildet die Grundlage für die nationalen Straßenverkehrsordnungen, welche durch Vereinheitlichung sicherer gemacht werden sollten. Der Vertrag wurde von der UN-Konferenz in Wien vom 7. Oktober bis 8. November 1968 beschlossen. Seither haben 74 Staaten die Konvention unterzeichnet. In Deutschland wurde das Übereinkommen am 03.08.1978 ratifiziert, die Niederlande sind am 08.11.2007 beigetreten. Bisher stand das Wiener Abkommen in der Fassung von 1968 dem autonomen Fahren entgegen. Verständlich, denn an autonomes Fahren konnte 1968 noch keiner denken. Der wesentliche Grund liegt in der Formulierung, dass zwingend ein Fahrer notwendig ist: Jedes Fahrzeug und miteinander verbundene Fahrzeuge müssen, wenn sie in Bewegung sind, einen Führer haben. 2 Jeder Führer muss dauernd sein Fahrzeug beherrschen oder seine Tiere führen können. 3 Jeder Fahrzeugführer muss unter allen Umständen sein Fahrzeug beherrschen, um den Sorgfaltspflichten genügen zu können und um ständig in der Lage zu sein, alle ihm obliegenden Fahrbewegungen auszuführen. Er muss bei der Wahl der Geschwindigkeit seines Fahrzeugs ständig die Umstände berücksichtigen, insbesondere die örtlichen Verhältnisse, den Strassenzustand, den Zustand und die Beladung seines Fahrzeugs, die Witterungsverhältnisse und die Dichte des Verkehrs, um innerhalb der nach vorn übersehbaren Strecke und vor jedem vorhersehbaren Hindernis sein Fahrzeug anhalten zu können. Er muss langsamer fahren und, wenn nötig, anhalten, sobald die Umstände es verlangen, namentlich wenn die Sicht nicht gut ist. 4 2 Wiener Abkommen, 1968, Artikel 8, Absatz 1 3 Wiener Abkommen, 1968, Artikel 8, Absatz 5 4 Wiener Abkommen, 1968, Artikel 13, Absatz 1
2. Allgemeine rechtliche Situation 13 «Führer» ist jede Person, die ein Kraftfahrzeug oder ein anderes Fahrzeug (Fahrräder eingeschlossen) lenkt oder die auf einer Straße Vieh, einzeln oder in Herden, oder Zug—, Saum— oder Reittiere leitet 5 Dieser Problematik wurde durch eine Änderung aus dem Jahr 2014 begegnet. Seit 23.02.2016 sind nun folgende Formulierungen Teil des Wiener Abkommens: Fahrzeugsysteme, die einen Einfluss auf das Führen des Fahrzeugs haben, gelten mit Absatz 5 dieses Artikels und mit Absatz 1 des Artikels 13 als konform, sofern sie den Vorschriften bezüglich Bauweise, Montage und Benutzung nach Massgabe der internationalen Rechtsvorschriften für Kraftfahrzeuge, Ausrüstungsgegenstände und Teile, die in Kraftfahrzeuge eingebaut und/oder dafür verwendet werden können, entsprechen; Fahrzeugsysteme, die einen Einfluss auf das Führen eines Fahrzeugs haben und die nicht den oben erwähnten Vorschriften bezüglich Bauweise, Montage und Benutzung entsprechen, gelten mit Absatz 5 dieses Artikels und mit Absatz 1 des Artikels 13 als konform, sofern die Fahrzeugsysteme vom Fahrzeugführer übersteuert oder desaktiviert werden können. 6 Der Führer eines Fahrzeugs muss alle anderen Tätigkeiten als das Führen seines Fahrzeugs vermeiden. Die innerstaatlichen Rechtsvorschriften sollten Bestimmungen zur Benutzung von Telefonen durch die Fahrzeugführer vorsehen. In jedem Fall müssen sie die Benutzung von Telefonen ohne Freisprecheinrichtung durch Führer eines sich in Bewegung befindlichen Motorfahrzeugs oder Motorfahrrads verbieten. 7 Mit diesen zusätzlichen Absätzen wird rechtlich sichergestellt, dass der Fahrer weiterhin die Verantwortung für das System trägt und selbiges stets überwachen muss. Ein reiner Passagiertransport, wie es im Falle eines Level-5-VAF-Fahrzeuges vorgesehen ist, ist damit nicht zugelassen. Jedoch wurde durch die Änderung die Entwicklung hoch- und vollautomatisierter Fahrzeugkonzepte unterstützt. Ebenfalls unterstützt wird die Entwicklung autonomer Fahrzeuge durch einen Zusatzartikel, welcher die Verantwortung für Entwicklungsvorhaben auf nationale Ebene hievt: Die Vertragsparteien können im innerstaatlichen Bereich in den folgenden Fällen von den Bestimmungen dieses Anhangs abweichen: 5 Wiener Abkommen, 1968, Artikel 1, Begriffsbestimmung 6 Wiener Abkommen, 1968, Artikel 8, Absatz 5bis 7 Wiener Abkommen, 1968, Artikel 8, Absatz 6
2. Allgemeine rechtliche Situation 14 c) für Fahrzeuge zur Durchführung von Versuchen zur technischen Weiterentwicklung und Hebung der Verkehrssicherheit; 8 Damit ist das Wiener Abkommen zunächst kein Hindernis, sofern jedoch die Entwicklung autonomer Fahrzeuge mit reinem Passagiertransport, oder gar ohne Menschen im Fahrzeug vorangeschritten ist, muss das Wiener Abkommen zwingend geändert oder ergänzt werden um Regelungen zum Fahren ohne Fahrer. Die Gefahr ist groß, dass sich die Politik auf den neuen Paragraphen ausruht und die rechtzeitige Überarbeitung zur Vorbereitung auf das autonome Fahren im Level-5-Stadium vernachlässigt. 2.1.2 ECE-Regelungen Die Wirtschaftskommission für Europa der Vereinten Nationen (Kurz: UNECE) hat am 20. März 1958 Regelungen für technische Vorschriften für Radfahrzeuge und deren Ausrüstungsgegenstände beschlossen. Weiterhin sind durch diese Vorschriften Prüfverfahren und Bedingungen für die Typgenehmigung geregelt, denn nach Aktuell (Stand Februar 2017) haben die Regelungen 62 Vertragsparteien. Eine dieser Vertragsparteien ist die Europäische Union, wodurch auch Länder, welche keine direkten Vertragsparteien aber Teil der Europäischen Union sind, eigene Landeskennzahlen haben. Zu diesen Ländern gehören Irland, Malta und Zypern. Ziel des Abkommens war der Abbau von Schranken zwischen den Vertragsparteien bezüglich der technischen Ausstattung von Kraftfahrzeugen. Von zentraler Bedeutung für den Schritt zum autonomen Fahren ist in den ECE- Regelungen die Regelung R79 zu Lenkanlagen. Dort heißt es (Stand 27.05.2008, Revision 2): Sobald die automatische Lenkfunktion einsatzbereit ist, muss dies dem Fahrzeugführer angezeigt werden, und die Steuerung muss automatisch ausgeschaltet werden, wenn die Fahrzeuggeschwindigkeit den eingestellten Grenzwert von 10 km/h um mehr als 20 % überschreitet oder die auszuwertenden Signale nicht mehr empfangen werden. Bei Beendigung der Steuerung muss der Fahrzeugführer jedes Mal durch ein kurzes, aber charakteristisches optisches Signal und entweder ein akustisches oder ein fühlbares Signal an der Betätigungseinrichtung der Lenkanlage gewarnt werden. 9 Bezüglich der automatischen Lenkfunktion definiert die Regelung 79: 8 Wiener Abkommen, 1968, Artikel 60c 9 ECE Regelungen, 20.03.1958, Regelung 79, Absatz 5.1.6.1, Revision 2
2. Allgemeine rechtliche Situation 15 Die „automatische Lenkfunktion“ ist die Funktion in einem komplexen elektronischen Steuersystem, bei der die Betätigung der Lenkanlage aufgrund der automatischen Auswertung von Signalen erfolgen kann, die gegebenenfalls im Zusammenwirken mit passiven Infrastrukturelementen innerhalb des Fahrzeugs ausgelöst werden, um eine stetige Steuerung zu erreichen, durch die der Fahrzeugführer bei dem Folgen einer bestimmten Fahrspur, beim Rangieren bei niedriger Geschwindigkeit oder beim Einparken unterstützt wird. 10 Die ECE-Regelung R79 beschreibt damit lediglich ein leichtes automatisiertes Fahren bis Level 1, maximal Level 2. Diese Automatisierungsfunktion ist aber lediglich verbunden mit dem Fahren bis 10 km/h ± 2 km/h. Vorzufinden ist ein solches System lediglich bei Rangieraufgaben wie dem Parkassistenten. Auch die aktuellste Version, welche nur in Englisch vorzufinden ist (Stand: 14.09.2017, Revision 3), weist lediglich auf einen Nutzbereich bis 10 km/h + 2 km/h hin: The system shall only operate until 10 km/h (+2 km/h tolerance) 11 Bezug nimmt die Regelung in dieser Fassung auf Absatz 5.6.: Provisions for ACSF 12 ACSF steht dabei für „Automatically commanded steering function“, was der oben genannten automatischen Lenkfunktion entspricht. Automatically commanded steering function (ACSF)" means a function within an electronic control system where actuation of the steering system can result from automatic evaluation of signals initiated on-board the vehicle, possibly in conjunction with passive infrastructure features, to generate control action in order to assist the driver. 13 Die ECE-Regelung 79 spricht einer automatisierten Nutzung bis Level 4 oder gar einer autonomen Nutzung des Fahrzeuges im Level 5-Stadium entgegen. Zugrunde liegt lediglich eine Nutzung zum Parken oder Rangieren bis etwa 10 km/h. Aufgrund dieser Bestimmungen dürften hoch- und vollautomatisierte sowie vollautonome Fahrzeuge in Deutschland ausschließlich als Testfahrzeuge (§ 70 StVZO Ausnahmen und § 46 StVO Ausnahmegenehmigung und Erlaubnis) zugelassen werden. Experten fordern eine Aufhebung der Geschwindigkeitsbegrenzung, mindestens jedoch eine Anhebung auf 130 km/h, also der Richtgeschwindigkeit auf deutschen 10 ECE Regelungen, 20.03.1958, Regelung 79, Absatz 2.3.4.1, Revision 2 11 ECE Regelungen, 20.03.1958, Regelung 79, Absatz 5.6.1.1.1, Revision 3 12 ECE Regelungen, 20.03.1958, Regelung 79, Absatz 5.6, Revision 3 13 ECE Regelungen, 20.03.1958, Regelung 79, Absatz 2.3.4.1, Revision 3
2. Allgemeine rechtliche Situation 16 Autobahnen. Laut der Acatech Studie „Neue autoMobilität“ 14 sei eine vergleichbare Erweiterung der Regelung 79 bereits in der Entwicklung. Damit wäre eine hoch- oder vollautomatisierte Nutzung prinzipiell möglich, wenn auch nicht im vollen Umfang. Betrachtet man den völkerrechtlichen Charakter der Regelungen, so ist eine solche Änderung zwingend notwendig, um kollektiv den Weg für die Zukunft zu bereiten. Eine weitere Regelung ist in der Regelung 48 zu finden in Bezug auf Warnblinkanlagen und Fahrtrichtungsanzeiger, welche umgangssprachlich als „Blinker“ bezeichnet werden. Dort ist festgelegt, dass eine Warnblinkeinrichtung nach einem Unfall oder dem Aktivieren des Notbremsassistenten automatisch vom Fahrzeug aktiviert werden kann und darf: Das Warnblinklicht kann sich automatisch einschalten, wenn das Fahrzeug in einen Unfall verwickelt wurde oder nachdem das Notbremssignal wie in Absatz 6.23 beschrieben erloschen ist. In solchen Fällen kann das Warnblinklicht von Hand abschaltbar sein. 15 Problematischer ist die Situation bei der Betrachtung des Fahrtrichtungsanzeigers. Hier muss die Betätigung per Hand erfolgen, es ist also ganz klar eine Fahrerperson vorausgesetzt. Das Einschalten der Fahrtrichtungsanzeiger muss durch eine handbetätigte Einrichtung erfolgen, die ein synchrones Blinken aller Fahrtrichtungsanzeiger ermöglicht. 16 Das steht einem autonomen Betrieb entgegen, bei dem das Fahrzeug zur Orientierung im Verkehrsgeschehen eigenständig in der Lage sein muss, den Fahrtrichtungsanzeiger auszulösen um die umliegenden Fahrzeuge (sowohl autonome als auch von einem Fahrer gesteuerte Fahrzeuge) über die aktuelle Fahrsituation zu informieren. 2.2 Europarecht „Das Europarecht im weiteren Sinne umfasst darüber hinaus auch das Recht der anderen europäischen internationalen Organisationen.“ 17 Dabei teilt es sich in das Primärrecht und das Sekundärrecht. Das Primärrecht umfasst alle Verträge, sowohl diejenigen völkerrechtlicher Art wie das Wiener Abkommen und die ECE-Regelungen als auch innereuropäische Verträge wie zum Beispiel den EU-Vertrag und dessen Reformen. Das Sekundärrecht ist das Gemeinschaftsrecht, also die Gesetzgebung 14 Lemmer, Karsten: „Neue autoMobilität“ von: ACATECH Studie (Hg.), 2016 15 ECE Regelungen, 20.03.1958, Regelung 48, Absatz 6.6.7.2, Revision 2 16 ECE Regelungen, 20.03.1958, Regelung 48, Absatz 6.6.7.1 17 Wikipedia (Hg.), “Europarecht”, 18.05.2018, URL: https://de.wikipedia.org/wiki/Europarecht (Abrufdatum: 03.06.2018)
2. Allgemeine rechtliche Situation 17 innerhalb der Gemeinschaft wie zum Beispiel Richtlinien und Verordnungen. Somit ist es ein vom Primärrecht abgeleitetes Recht und darf nicht gegen das Primärrecht verstoßen. Nun gibt es zwei Sekundärrechte, welche genauer betrachtet werden sollten. Beide Regelungen haben Einfluss, wenn es um die Zulassung und den Betrieb von VAF innerhalb Europas geht. Zuerst gibt es das Sekundärrecht RL 2007/46/EG, welches am 05.09.2007 verabschiedet wurde. Es bezieht sich auf die Schaffung eines Rahmens für die Genehmigung von Kraftfahrzeugen und Kraftfahrzeuganhängern sowie von Systemen, Bauteilen und selbstständigen technischen Einheiten für diese Fahrzeuge. Zudem bezieht sich auch § 1a (3) der StVG zu diesem Recht und schreibt vor, dass § 1a (1) und (2) der StVG nur auf Fahrzeuge zutreffen „deren hoch- oder vollautomatisierte Fahrfunktionen, 1. in internationalen, im Geltungsbereich dieses Gesetzes anzuwendenden Vorschriften beschrieben sind und diesen entsprechen oder 2. eine Typgenehmigung gemäß Artikel 20 der Richtlinie 2007/46/EG“ besitzen. Damit ist festgestellt, dass hoch- oder vollautomatisierte Fahrzeuge bzw. Fahrzeuge mit solchen Funktionen, wie ganz normale Fahrzeuge auch, eine Betriebserlaubnis, Einzelgenehmigung oder Typgenehmigung haben müssen. Bedeutet aber auch, dass wenn die benötigten Voraussetzungen vorhanden sind und die „EG-Typgenehmigung gemäß Artikel 20 der Richtlinie 2007/46/EG haben, trotzdem am Verkehr teilnehmen dürfen, obwohl noch keine UN-ECE-Regelung (Internationale Vorschrift) zu einer automatisierten Fahrfunktion vorliegt.“ Wird über diese Genehmigung noch entschieden, ist sie erst mal nur in dem Hoheitsgebiet des Mitgliedstaates gültig, welcher den Antrag gestellt hat. Andere Mitgliedstaaten dürfen auch beschließen diese Genehmigung für dieses Fahrzeug auch in ihrem Hoheitsgebiet anzuerkennen. Die Genehmigung darf auch zeitlich begrenzt werden, wobei die kürzeste Begrenzungszeit bei 36 Monaten liegt. Somit ermöglicht diese Richtlinie bereits jetzt die Zulassung von hochautomatisierten oder fortgeschrittener Fahrzeugen, sofern vor allem laut Artikel 20 (2) c) „eine Beschreibung der durchgeführten Prüfungen und ihrer Ergebnisse zum Nachweis, dass Sicherheit und Umweltschutz mindestens in dem gleichen Maße gewährleistet sind wie durch die Anforderungen, von denen eine Ausnahme beantragt wird“ vorliegt. 18, 19 Die zweite Richtlinie trägt die Bezeichnung RL 2014/45/EU und wurde am 03.04.2014 verabschiedet. Sie bezieht sich auf die regelmäßige technische Überwachung von Kraftfahrzeugen und Kraftfahrzeuganhängern und zur Aufhebung der Richtlinie 2009/40/EG. Sie beschreibt also die neuen Richtlinien, die für die regelmäßig 18 Daubner, Robert: “Automatisiertes Fahren – Gesetz, Begriffe, Fahrzeugführer“ von: Daubner Verkehrsrecht (Hg.), 28.07.2017, URL: https://daubner-verkehrsrecht.info/2017/automatisiertes-fahren- gesetz-stufen (Abrufdatum: 15.04.2018) 19 EUR-Lex (Hg.), URL: https://eur-lex.europa.eu/legal-content/DE/ALL/?uri=celex:32007L0046 (Abrufdatum: 15.04.2018)
2. Allgemeine rechtliche Situation 18 stattfindende Hauptuntersuchung der Fahrzeuge vorgeschrieben sind. Es kamen neue hinzu, sowie wurden bestehende verschärft. Wichtig ist auch das ab dem 20.05.2018 dürfen nur noch die Prüfeinrichtungen verwendet werden, welche den in diesen Richtlinien stehenden Mindestanforderungen entsprechen. Ausnahmen dürfen die Mitgliedstaaten nur noch bis zum 20.05.2021 erteilen. Bezüglich hochautomatisierter Fahrzeuge und weiter fortgeschrittenen Fahrzeuge betrifft es dabei z.B. die Funktion des Auto-Piloten, welcher ein Leben lang zuverlässig zu funktionieren hat und deshalb geprüft werden müssen. Somit haben Betriebe wie z.B. der TÜV nun die Aufgabe sichere Prüfmethoden für die Typzulassung zu entwickeln. Viel wird zukünftig wohl auch durch simulationsbasierte Prüfungen stattfinden, da es zu komplex werden wird alle automatisierten Funktionen im Feldversuch zu überprüfen. Zudem äußerte sich die Bundesregierung dazu, in dem sie angab mit der Automobilindustrie bereits zusammen zu arbeiten, um „geeignete Systemstrukturen und Systemtests für das Test- und Freigabeverfahren für Funktionen des hochautomatisierten Fahrens“ zu bewerten und neue Testeinrichtungen zu etablieren. Solche sollen dann in die Richtlinie 2014/45/EU und auch in die 2007/46/EG aufgenommen werden. 20, 21 Seit September 2017 stehen grenzüberschreitende Routen für Testfahrzeuge in der Europäischen Kommission in Diskussion. Geplant sind Routen zwischen Portugal und Spanien, der Niederlande und Belgien sowie zwischen Norwegen und Finnland. Ziel ist die Entwicklung grenzüberschreitender Infrastruktur, damit automatisierte und autonome Fahrzeuge zukünftig nicht durch Grenzen aufgehalten oder deren Fahrt infrastrukturbedingt unterbrochen wird. Dies geschieht auch in der Hoffnung, damit die Entwicklung in Europa nicht der Entwicklung in Ländern wie z.B. den USA hinterher hinkt. 22 2.2.1 Europäisches Zusatzabkommen zum Übereinkommen zum Straßenverkehr Ergänzend zum Wiener Abkommen über den Straßenverkehr wurde am 28. Mai 1971 in Genf das Europäische Zusatzabkommen zum Übereinkommen zum Straßenverkehr geschlossen. Das Ziel war die stärkere Vereinheitlichung der Verkehrsregeln im Europäischen Raum. Jedoch findet eine Bindung an die Inhalte dann nicht statt, wenn der Vertragspartner einen Vorbehalt gegen bestimmte Teile des Zusatzabkommens bei 20 EUR-Lex (Hg.), URL: https://eur-lex.europa.eu/legal-content/DE/TXT/?uri=celex%3A32014L0045 (Abrufdatum: 23.05.2018) 21 Schachtner, M. / Väthroder, D. / Winkler, D.: “Auch Software muss geprüft werden“ von: Verkehrs Rundschau (Hg.), 10.11.2017, URL: https://www.verkehrsrundschau.de/nachrichten/auch-software-muss- geprueft-werden-2035760.html (Abrufdatum: 23.05.2018) 22 Knop, Carsten: “Neue grenzüberschreitende Testregionen für autonomes Fahren“ von: Frankfurter Allgemeine Zeitung (Hg.), 13.09.2017, URL: http://www.faz.net/aktuell/wirtschaft/autonomes-fahren- soll-grenzueberschreitend-getestet-werden-15196912.html (Abrufdatum: 09.05.2018)
2. Allgemeine rechtliche Situation 19 der Vertragsunterzeichnung formuliert. Auch ein Austreten aus dem Abkommen ist jederzeit mit einer Frist von 12 Monaten möglich. Inhalt des Anhangs sind Änderungen oder Ergänzungen zu den Inhalten des Wiener Übereinkommens über den Straßenverkehr, die jedoch keine Auswirkungen auf das autonome oder hoch- und vollautomatisierte Fahren haben. In Deutschland ist das Zusatzabkommen am 03.08.1979, in den Niederlanden am 08.11.2008 in Kraft getreten. 23 2.2.2 Amsterdamer Erklärung Am 14. und 15.04.2016 trafen sich die 28 Verkehrsminister der EU-Mitgliedstaaten in Amsterdam, unter anderem um über das autonome und vernetzte Fahren untereinander und mit den Automobilherstellern zu reden zu reden. Am Ende des informellen Treffens stand die „Amsterdamer Erklärung“ 24, in welcher Maßnahmen für eine gemeinsame Entwicklung des autonomen Fahrens abgesprochen wurden. Das Ziel sei eine rechtliche und technische Basis für den grenzüberschreitenden, europäischen und autonomen Verkehr bis 2019 zu schaffen, sowie eine Behinderung der Markteinführung, durch zu viele verschiedene Gesetze, zu verhindern. Dabei wurden auch die Themenbereiche Umweltschutz, Haftung und Verkehrsoptimierung diskutiert. Mit dieser Erklärung ist damit der Grundstein für eine gemeinsame europäische Zusammenarbeit und Standardisierung gelegt. Es bedarf allerdings noch viel Arbeit, um dem informellen Treffen Taten folgen zu lassen. Eine europäische Lösung ist notwendig, um die Entwicklung des autonomen Fahrens voranzutreiben und eine einheitliche Infrastruktur und einheitliche Gesetze für den Betrieb autonomer Fahrzeuge zu schaffen. 25 2.3 Nationale Gesetze – Deutschland In Deutschland sind vor allem die Straßenverkehrsordnung (StVO) und das Straßenverkehrsgesetz (StVG) wesentliche Bausteine der legislativen Ordnung bezüglich des autonomen Fahrens. 2.3.1 Straßenverkehrsordnung (StVO) In der Straßenverkehrsordnung werden Anforderungen an den Fahrer festgehalten. 23 Schweizer Bundesrat (Hg.), „Europäisches Zusatzübereinkommen zum Übereinkommen über den Straßenverkehr“, 28.03.2006, URL: https://www.admin.ch/opc/de/classified- compilation/19710098/200603280000/0.741.101.pdf (Abrufdatum: 09.05.2018) 24 Deutsches Verkehrsforum (Hg.), „Automatisiertes Fahren muss in ganz Europa funktionieren“, 15.04.2016, URL: https://www.verkehrsforum.de/application/files/8015/0520/7959/16-04- 15_Amsterdamer_Erklaerung.pdf (Abrufdatum: 16.05.2018) 25 Steudel, Ulrich: „Autonomes Fahren gewinnt an Tempo“ von: Deutsche Handwerks Zeitung (Hg.), 19.04.2016, URL: https://www.deutsche-handwerks-zeitung.de/autonomes-fahren-gewinnt-an- tempo/150/3097/327501 (Abrufdatum: 16.05.2018)
2. Allgemeine rechtliche Situation 20 In §1 Abs. 2 S. 1 StVO steht: „…die Pflicht desjenigen, der am Verkehr teilnimmt, sich so zu verhalten, dass kein anderer geschädigt, gefährdet oder –als nach den Umständen unvermeidbar –behindert oder belästigt wird.“ und in §3 Abs. 1 S. 1 StVO: „die Pflicht desjenigen, der ein Fahrzeug führt, zur Fahrzeugbeherrschung in Bezug auf die Geschwindigkeit. Diese Geschwindigkeit darf nur so hoch sein, wie das Fahrzeug noch ständig beherrscht wird.“ Nach diesen Definitionen muss ein Fahrer das Fahrzeug dauerhaft überwachen und gegebenenfalls über ein teilautomatisiertes System übersteuernd eingreifen. 26 Die Straßenverkehrsordnung sagt im §3 Satz 1: Wer ein Fahrzeug führt, darf nur so schnell fahren, dass das Fahrzeug ständig beherrscht wird. Die Geschwindigkeit ist insbesondere den Straßen-, Verkehrs-, Sicht- und Wetterverhältnissen sowie den persönlichen Fähigkeiten und den Eigenschaften von Fahrzeug und Ladung anzupassen. 27 Dabei geht die StVO von einer menschlichen Person als Fahrer aus. Dies steht im Widerspruch zum autonomen Fahren, weshalb eine Neudefinition des Fahrers, welcher im Falle eines autonomen Fahrzeuges ein Computer ist, oder eine Änderung der Gesetzesformulierung notwendig ist. Andere Paragraphen, wie der §36, sind auf ein autonomes Fahrzeug nicht anwendbar. Polizeibeamte dürfen Verkehrsteilnehmer zur Verkehrskontrolle einschließlich der Kontrolle der Verkehrstüchtigkeit und zu Verkehrserhebungen anhalten. Das Zeichen zum Anhalten kann auch durch geeignete technische Einrichtungen am Einsatzfahrzeug, eine Winkerkelle oder eine rote Leuchte gegeben werden. 28 Eine Fahrzeugkontrolle ist damit zwar für einen menschlichen Fahrer gesetzlich geregelt, nicht jedoch für ein autonomes Fahrzeug. Hier besteht der Bedarf nach neuen rechtlichen und eventuell auch technischen Möglichkeiten, eine Fahrzeugkontrolle eines autonomen Fahrzeuges durchzuführen. 2.3.2 Straßenverkehrs-Zulassungs-Ordnung (StVZO) Die StVZO basiert auf Grundlage des Straßenverkehrsgesetzes und wird von dem Bundesministerium für Verkehrs-, Bau- und Wohnungswesen herausgegeben. Bis 1998 regelte die StVZO gemeinsam mit der StVO den größten Teil des Straßenrechts, sie 26 Wörner, Ralf: „Skript Mobilitätskonzepte“, 09.03.2018, S.160 (Abrufdatum: 21.05.2018) 27 StVO §3 Satz 1 28 StVO §36 Satz 5
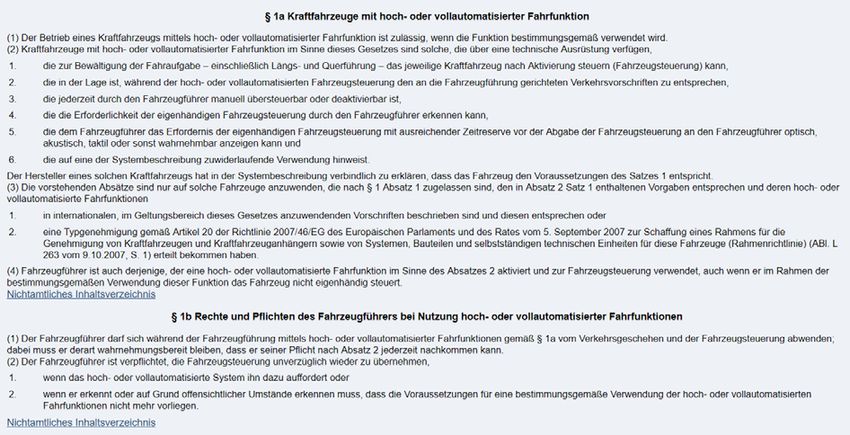
2. Allgemeine rechtliche Situation 21 wird inzwischen aber abgeschafft und in andere Verordnungen überführt. 29 Im StVZO werden vor allem Anforderungen an das Fahrzeug gestellt, welche zu Teilen ebenfalls autonomes Fahren betreffen. In §3 Abs. 1 S. 2 steht: „Voraussetzung für eine Fahrzeugzulassung ist das Vorliegen einer EG-Typgenehmigung, einer nationalen Typgenehmigung oder einer Einzelgenehmigung sowie das Bestehen einer Kraftfahrzeughaftpflichtversicherung“. Auf die Sonderzulassungen kommen wir in einem späteren Punkt zurück. In §4 Abs. 2 RL 2007/46/EG dazu weiter: „die Mitgliedstaaten dürfen eine Genehmigung für Fahrzeuge, Systeme, Bauteile oder selbstständige technische Einheiten nur erteilen, wenn diese den Anforderungen dieser Richtlinie entsprechen“. In §35 Abs. 1 RL 2007/46/EG wird allerdings auf die ECE-Reglungen der Vereinten Nationen verwiesen, was eine Abhängigkeit auf das international beschlossene Recht deutlich macht: „Verweis in Anhang II des §35 auf ECE-Regelungen der Vereinten Nationen und erklärt diese für gleichwertige Bestandteile des sekundären Gemeinschaftsrechts“. 30 2.3.3 Straßenverkehrsgesetz Am 30.03.2017 wurde eine Anpassung des StVG vorgenommen und verabschiedet. Es wurden im Wesentlichen die Paragraphen §1a und §1b eingefügt. Paragraph §1c verweist auf eine Prüfung der Änderungen nach 2019. Abbildung 1: Auszug aus dem StVG 29 Wikipedia (Hg.), „Straßenverkehrs-Zulassungs-Ordnung“, 13.11.2017, URL: https://de.wikipedia.org/wiki/Stra%C3%9Fenverkehrs-Zulassungs-Ordnung (Abrufdatum: 20.05.2018) 30 Wörner, Ralf: „Skript Mobilitätskonzepte“, 09.03.2018, S.161 (Abrufdatum: 21.05.2018)
2. Allgemeine rechtliche Situation 22 §1a beschreibt die Rahmenbedingungen an das automatisierte Fahren besonders für den Hersteller. Dieser Paragraph legitimiert damit Fahrzeuge bis Level 4 der Automatisierung. Eine Nutzung im Level 5 Bereich wird durch die Formulierung „Fahrzeugführer“ nicht gestattet. §1b klärt Rechte und Pflichten des Fahrzeugführers, welcher zwar dem Verkehrsgeschehen nicht mehr aktiv folgen muss, jedoch in jeder Situation in der Lage sein muss die Fahrzeugsteuerung auf Anweisung oder dem Erkennen von offensichtlichen Umständen zu übernehmen. Damit stellen die Paragraphen §1a und §1b die Umsetzung der Änderung des Wiener Abkommens aus dem Jahr 2016 dar, welche hier auf die nationale Ebene gespiegelt wurde und damit den Weg für das hoch- und vollautomatisierte Fahren seitens des StVG freimacht. Das autonome Fahren im Charakter des Level 5 wird mit diesem Gesetz jedoch nicht erlaubt, eine weitergehende Anpassung muss zwingend stattfinden, sobald die Ausstattung mit Level 5 Technologie in greifbare Nähe rückt. Auf dieser Gesetzesgrundlage ist jedoch ein Betrieb auf dem „Digitalen Testfeld Autobahn“, namentlich der A9 zwischen Nürnberg und München, möglich. Das „Digitale Testfeld Autobahn“ ist ein Projekt, das 2015 gestartet wurde und seither die Möglichkeit für Wissenschaftler und Automobilhersteller bietet, die automatisierten Fahrzeuge in einem Mischbetrieb unter realen Bedingungen zu testen. 2.3.4 Haftung 2.3.4.1 Halter- und Fahrerhaftung Wird bei dem Betrieb eines Kraftfahrzeugs oder eines Anhängers, der dazu bestimmt ist, von einem Kraftfahrzeug mitgeführt zu werden, ein Mensch getötet, der Körper oder die Gesundheit eines Menschen verletzt oder eine Sache beschädigt, so ist der Halter verpflichtet, dem Verletzten den daraus entstehenden Schaden zu ersetzen. 31 Das bedeutet, dass eine Haftung des Fahrzeughalters verschuldensunabhängig ist – die Haftung für sein Kraftfahrzeug muss er in jedem Fall antreten, auch wenn er nicht gleichzeitig Fahrer war. Damit ist der Fall des hoch- und vollautomatisierten Fahrzeuges abgedeckt, sogar ein autonomes Fahrzeug kann in diesem Rahmen abgedeckt sein, unabhängig davon ob der Halter gleichzeitig Passagier ist. Ausnahmen für die Halterhaftung sind nach §7 (2) und §7 (3) lediglich auf höhere Gewalt und den Fall der Benutzung ohne Wissen und Willen des Halters begrenzt. 31 StVG §7 (1)
2. Allgemeine rechtliche Situation 23 Eine juristische Klarstellung wäre dennoch empfehlenswert, denn es ist fraglich, ob dem Halter tatsächlich eine juristische Verantwortung aufgetragen werden kann, wenn es im Falle eines Level 5 Fahrzeuges keine Verpflichtung oder gar Möglichkeit zum Eingreifen ins Fahren gibt. Der Bericht der Ethikkommission schlägt in These 10 seines Berichtes hier eine ganzheitliche Übertragung der Verantwortung auf die Hersteller und Betreiber der technischen Systeme vor. In den Fällen des § 7 Abs. 1 ist auch der Führer des Kraftfahrzeugs oder des Anhängers zum Ersatz des Schadens nach den Vorschriften der §§ 8 bis 15 verpflichtet. Die Ersatzpflicht ist ausgeschlossen, wenn der Schaden nicht durch ein Verschulden des Führers verursacht ist. 32 Im Falle des voll- und hochautomatisierten Fahrens empfehlen wir für den §17 eine Konkretisierung des Paragraphen um den Gedanken einer sogenannten Blackbox, welche im Falle eines Unfalles beweist, ob zum jeweiligen Zeitpunkt der Fahrzeugführer oder das automatisierte System gefahren ist. Damit könnte im Zweifelsfall eindeutig definierbar sein, ob ein Verschulden des Fahrzeugführers vorliegt. Alternativ könnte der Absatz im Falle eines bis Level 4 ausgestatteten Fahrzeuges so interpretiert werden, dass allein durch die Möglichkeit des Deaktivierens des automatisierten Eingriffs der Fahrer in der Haftung ist. 33 Allerdings muss spätestens in Vorbereitung auf Level 5 Fahrsysteme eine Konkretisierung erfolgen. 2.3.4.2 Produkthaftung Bei einem hoch- und vollautomatisierten Fahrzeug sowie dem autonomen Fahrzeug handelt es sich nach §474 (1) BGB um ein Verbrauchsgut. In diesem Fall gilt grundlegend die Beweislastumkehr nach §477, was bedeutet, dass der Hersteller im Falle eines Unfalls des Fahrzeuges in den ersten, kritischen Monaten, Beweise für die Fehlerlosigkeit vorbringen muss. Damit finden bereits heute ein Schutz des Verbrauchers und eine Haftung des Herstellers statt. Verbrauchsgüterkäufe sind Verträge, durch die ein Verbraucher von einem Unternehmer eine bewegliche Sache kauft. 34 Zeigt sich innerhalb von sechs Monaten seit Gefahrübergang ein Sachmangel, so wird vermutet, dass die Sache bereits bei Gefahrübergang mangelhaft war, es sei denn, diese Vermutung ist mit der Art der Sache oder des Mangels unvereinbar. 35 32 StVG §17 (1) 33 Oppermann, Bernd / Stender-Vorwachs, Jutta: „Autonomes Fahren“ von: C.H. Beck (Hg.), 2017, Seite 63 34 BGB §474 (1) 35 BGB §477
2. Allgemeine rechtliche Situation 24 Auch berufen kann man sich bei Sachmängeln auf §823 (1) BGB, welcher die Schadenersatzpflicht definiert: Wer vorsätzlich oder fahrlässig das Leben, den Körper, die Gesundheit, die Freiheit, das Eigentum oder ein sonstiges Recht eines anderen widerrechtlich verletzt, ist dem anderen zum Ersatz des daraus entstehenden Schadens verpflichtet. 36 Im Sinne der Produkthaftung definiert zusätzlich und damit spezifizierend das Produkthaftungsgesetz: Wird durch den Fehler eines Produkts jemand getötet, sein Körper oder seine Gesundheit verletzt oder eine Sache beschädigt, so ist der Hersteller des Produkts verpflichtet, dem Geschädigten den daraus entstehenden Schaden zu ersetzen. 37 Für einen Fehler definiert das Produkthaftungsgesetz weiter: Ein Produkt hat einen Fehler, wenn es nicht die Sicherheit bietet, die unter Berücksichtigung aller Umstände, insbesondere des Gebrauchs, mit dem billigerweise gerechnet werden kann, berechtigterweise erwartet werden kann. 38 Damit ist grundlegend auch seitens der Produkthaftung der Fall des automatisierten Einsatzes geregelt, denn zu jedem Zeitpunkt ist entweder der Halter nach §7 (1) StVG oder der Hersteller nach §1 ProdHaftG verschuldensunabhängig in der Haftung. Auch der Bericht der Ethikkommission empfiehlt das Produkthaftungsgesetz in seiner jetzigen Gestalt in These 11, um eine stetige Verbesserung der Systeme seitens der Hersteller zu fördern. Ein Beispiel für einen solchen Fehler liefert §4 (1) Satz 2 StVO: Wer vorausfährt, darf nicht ohne zwingenden Grund stark bremsen. 39 Das ist daher unpraktisch, als das auch eine herumfliegende Plastiktüte von einem autonomen Fahrzeug nach aktuellem Stand der Technik als Gefahr und damit als Grund zum Abbremsen erkannt werden kann. Eine Gefahrenbremsung wäre die Konsequenz. Fraglich ist, wie der zwingende Grund definiert ist – Im letzten erschiene es logisch, wenn ein autonomes Fahrzeug eine Gefahrenbremsung zu viel wegen einer Plastiktüte oder vergleichbarem macht, als dass es wie zuletzt am 18.03.2018 in Tempe (Arizona) 36 BGB §823 (1) 37 ProdHaftG §1 38 ProdHaftG §3 (1) b 39 StVO §4 (1) Satz 2
2. Allgemeine rechtliche Situation 25 mit weniger sensiblen oder gar ausgeschalteten Notbremsassistenten eine Passantin übersieht 40. Denn: Der Abstand zu einem vorausfahrenden Fahrzeug muss in der Regel so groß sein, dass auch dann hinter diesem gehalten werden kann, wenn es plötzlich gebremst wird. 41 Eine Spezifizierung für autonome Fahrzeuge bezüglich des §4 (1) Satz 2 StVO erscheint also notwendig, um nach aktuellem Stand der Technik Passanten zu schützen. Was dagegen noch offen im Raum steht ist die Frage, wie sich die Haftung im Falle von vernetzten Systemen gestaltet und welche Institution oder Technologie dabei für die Verfolgung der Fehlerursachen verantwortlich ist. Dabei wäre es gut vorstellbar, dass die von uns empfohlene Blackbox auch gleichzeitig die Datenmengen abspeichert, die das autonome Fahrzeug über V2V- oder V2I-Schnittstellen empfängt und für Zwecke der eigenen Positionierung, Vorausschau im Verkehr oder ähnlicher, zum Unfall führender Aktionen abspeichert. Hilfreich sind dabei Redundanzen, also das gleichzeitige Speichern von gesendeten Daten, damit in jedem Fall sowohl Daten im verunfallten Fahrzeug als auch in dem Fahrzeug, das beschuldigter Weise dafür verantwortliche Daten gesendet haben soll, verfügbar sind. Während für die empfangenen Daten eine recht kurze Zeitspanne der Speicherung nötig sind (Beispielsweise vom Unfallzeitpunkt zurückgerechnet 10 Min, um das unmittelbare Geschehen davor zu analysieren) muss die Speicherung der gesendeten Daten über einen längeren Zeitraum erfolgen, da das sendende Fahrzeug nicht unmittelbar am Unfall beteiligt ist und Fahrer oder Fahrzeug erst durch Ermittlungen der Behörden mit der Thematik behelligt wird. Ziel soll es dabei sein, anhand der Blackboxen die Fehlerursache zu identifizieren. Momentan ist der Fall von vernetzten Fahrzeugen noch nicht abgedeckt. Zukünftig muss das Fahrzeug nicht mehr als alleiniges Objekt, sondern als Netzwerk aus vielen Fahrzeugen verstanden und auch rechtlich definiert sein im Hinblick auf Datenschutz und Haftung. Ein Einstieg wäre die Identifizierung der Unfallherkunft auf Basis der Blackboxen und Daten von den Verkehr regelnden Institutionen durch polizeiliche Ermittlung. 2.3.5 Datenschutz Bundesdatenschutzgesetz (BDSG) Im Gegensatz zu anderen Rechtskulturen (wie in den USA) dürfen Unternehmen laut EU-DSGVO grundsätzlich nur dann persönliche Daten verarbeiten – dies beinhaltet das 40 Spiegel Online (Hg.), „Automatische Notbremsung war nicht eingeschaltet“, 24.05.2018, URL: http://www.spiegel.de/auto/aktuell/uber-unfall-automatische-notbremsung-bei-roboterwagen-war-nicht- eingeschaltet-a-1209424.html (Abrufdatum: 24.05.2018) 41 StVO §4 (1) Satz 1
Sie können auch lesen