SSR-RTK - Korrekturdatendienst für hochgenaue Positionierung in der deutschen ausschließlichen Wirtschaftszone in der Nordsee: Nordsee-Vernetzung
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Fachbeitrag Jahn et al., SSR-RTK – Korrekturdatendienst für hochgenaue Positionierung …
SSR-RTK – Korrekturdatendienst für hochgenaue
Positionierung in der deutschen ausschließlichen
Wirtschaftszone in der Nordsee: Nordsee-Vernetzung
SSR-RTK – Service for High-Precision Positioning in the
North Sea exclusive Economic Zone: North Sea Networking
Cord-Hinrich Jahn | Robert Schumann | Bernd Vahrenkamp | Patrick Westfeld |
Gerhard Wübbena | Martin Schmitz | Christoph Wallat
Zusammenfassung 1 Einleitung
In einem zweijährigen Forschungs- und Entwicklungsprojekt
(F&E-Projekt) wird der Prototyp eines GNSS (Global Navigation Seit 2009 setzt das Bundesamt für Seeschifffahrt und Hy-
Satellite System) basierten Echtzeitdienstes unter Verwendung drographie (BSH) für die Seevermessung in küstennahen
eines SSR-RTK (State Space Representation-Real Time Kinema- Bereichen den hochpräzisen Echtzeit-Satellitenpositionie-
tic) Ansatzes für die ausschließliche Wirtschaftszone (AWZ) in rungsdienst der deutschen Landesvermessung (SAPOS-
der Nordsee entwickelt. Durch die heterogene Verteilung von HEPS; AdV 2019) ein, der aus einem Netz von GNSS-
GNSS-Referenzstationen, mit der Besonderheit, dass im Zielge- Referenzstationen abgeleitete Korrekturdaten bereitstellt
biet keine Stationen vorhanden sind, kommt der Modellierung (Ellmer 2013). In den Jahren 2014 bis 2015 wurden in
der GNSS-Korrekturdaten und dem Berechnungsalgorithmus Kooperation zwischen dem BSH, der ZSS und der Geo++
eine besondere Bedeutung zu. Das Bundesamt für Seeschiff- GmbH erste Untersuchungen und Testmessungen hoch-
fahrt und Hydrographie (BSH) als Auftraggeber, die Zentrale genauer GNSS-Fehlermodellierung auf der Basis eines
Stelle SAPOS (ZSS) als Dienstbetreiber und die Geo++ GmbH SSR‑RTK-Ansatzes (siehe Abschnitt 3 Verfahrensgrund-
als Softwarelieferant entwickeln gemeinsam diesen Prototy- sätze) im Bereich der AWZ in der Nordsee durchgeführt,
pen. Erste landbasierte Testmessungen, die in einer nachge- um die grundsätzliche Eignung dieser neuen Vernetzungs-
bildeten Testumgebung durchgeführt werden, zeigen vielver- technik nachweisen zu können (Ellmer 2013, Jahn et al.
sprechende Ergebnisse im Hinblick auf die qualitativen Ziele 2017).
des Gemeinschaftsprojektes. Eine entscheidende Aufgabenstellung besteht für das
BSH darin, auch in küstenfernen Bereichen der AWZ in
Schlüsselwörter: SAPOS, SSR-RTK, GNSMART, Echtzeitpositio- der Nordsee hochgenaue Echtzeitpositionen, insbesondere
nierung, Seevermessung in der Höhenkomponente, zuverlässig und präzise zu ge-
nerieren. Da im Gebiet der Nordsee, bis auf wenige Platt-
formen, keine GNSS-Referenzstationen verfügbar sind, ist
Summary die SSR-RTK-Technik für diese spezielle Aufgabenstellung
Within a two-year R&D project (Research and Development), the prädestiniert. Dabei wird der Nutzer nicht mit Korrek-
prototype of a GNSS (Global Navigation Satellite System) based turdaten bezüglich einzelner Referenzstationen versorgt
real-time positioning service is developed using the SSR-RTK (Daten im Beobachtungsraum, Observation Space Repre-
(State Space Representation-Real Time Kinematic) approach for sentation, OSR), sondern mit Parametern eines Fehlermo-
the exclusive economic zone (EEZ) in the North Sea. Because of dells (Daten im Zustandsraum, State Space Representation,
the heterogeneous distribution of GNSS reference stations and SSR). Die grundsätzliche Beschreibung dieses Ansatzes
especially the lack of reference stations in the main area of in- findet sich in Wübbena et al. (2005).
terest, the modeling of GNSS correction data and the processing Im Rahmen eines gemeinsamen F&E-Projektes wer-
algorithm is of critical importance. The Federal Maritime and den in den Jahren 2020 bis 2021 wissenschaftliche, tech-
Hydrographic Agency (BSH) as the customer, the Central Office nische und dienstbasierte Fragestellungen untersucht. Das
SAPOS (ZSS) as a service provider and Geo++ GmbH as the soft- F&E‑Projekt stellt damit die Fortführung der in den Jah-
ware provider jointly develop the prototype. First land-based test ren 2014 bis 2015 durchgeführten Tests in der AWZ der
measurements have been conducted in a replicated test environ- Nordsee dar, die unter dem Arbeitsbegriff »Weitbereichs-
ment, yielding promising results in view of the quality goals of the vernetzung« firmierten.
collaborative project.
Keywords: SAPOS, SSR-RTK, GNSMART, Real Time Positioning,
Hydrographic Surveying
126 | zfv 2/2021 146. Jg. | DVW © Wißner-Verlag DOI 10.12902/zfv-0342-2021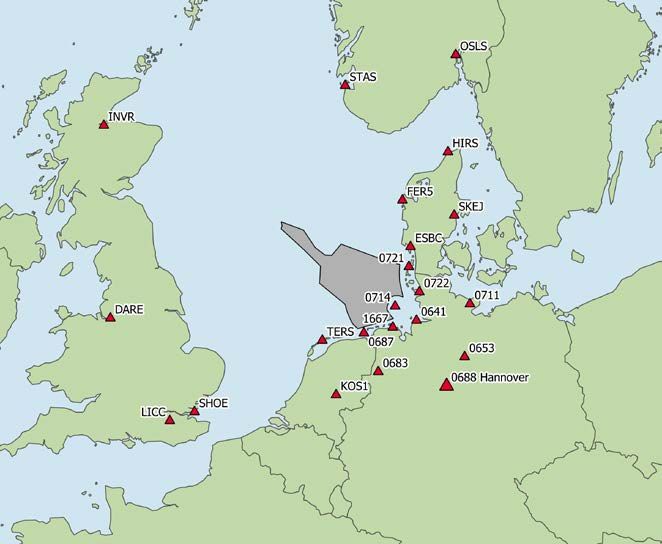
Jahn et al., SSR-RTK – Korrekturdatendienst für hochgenaue Positionierung … Fachbeitrag
2 Zielsetzung und Planungsansätze Seevermessung. Der Nachweis und die Sicherung der ge-
forderten Qualitätsziele stellen somit für alle Partner eine
Das Kernziel des F&E-Projektes besteht darin, das Poten- große Herausforderung dar.
zial der neuen innovativen SSR-RTK-Technologie zur Das F&E-Projekt gliedert sich in unterschiedliche
hochgenauen und zuverlässigen Positionierung in der Arbeitspakete, die in Abb. 1 dargestellt sind. Neben der
AWZ zu erproben und den dabei entstandenen Prototypen Inbetriebnahme des Gesamtsystems stellen die optimale
in einen Korrekturdatendienst »Nordsee-Vernetzung« zu Anpassung der GNSS-Vernetzungssoftware an die Bedin-
überführen. gungen der heterogenen Verteilung der Referenzstationen
und die Durchfüh-
rung umfangreicher
Installation Konfiguration Aufbau Testbetrieb Finalisierung
technische Datenströme, Schiffsinfrastruktur, Land- und Validierung
Testmessungen zum
Infrastruktur, stationäre + Betriebsparameter Schiffstests, Qualitätssicherung Nachweis der Funk-
Testkonfiguration kinematische Konzeptionierung Übergabe tionsfähigkeit des
Landtests eines Wirkbetriebs
Protot ype-Dienstes
eine zentrale Auf-
gabe dar. Fragen der
Q2/Q3 2020 Q4 2020 Q1/Q2 2021 Q3 2021 Q4 2021 Redundanz werden
Abb. 1: Zeitliche und inhaltliche Darstellung des Verlaufs des F&E‑Projektes zunächst konzeptio-
nell betrachtet. Die
Das BSH hat als Initiator und Auftraggeber die folgen- Aspekte der Qualitätssicherung werden durch Aufbau und
den Qualitätsziele des Projektes definiert: Betrieb einer Monitoringstation innerhalb der Süd-Vernet-
p Die Höhengenauigkeit der Position der Antenne im zung (Abb. 3b) analysiert.
ETRS89 ist besser als 10 cm (2σ-Konfidenzintervall);
p die Zeiten bis zum Erreichen der geforderten Genauig-
keit sollen im Regelfall bei der Erstinitialisierung kleiner 3 Verfahrensgrundsätze
als zwei Minuten und danach in Quasi-Echtzeit erfolgen;
p der Prototyp soll eine hohe Verfügbarkeit für das gesam- Herkömmliche Vernetzungsverfahren, die zum Beispiel
te Gebiet der AWZ der Nordsee garantieren und im Bereich des SAPOS-HEPS-Dienstes verwendet werden
p das Format für die Korrekturdatenübertragung soll of- (AdV 2019), basieren auf einer gewissen Regelmäßigkeit
fen, lizenzfrei und dokumentiert sein. in der Verteilung der GNSS-Referenzstationen mit einem
typischen Abstand von etwa 40 bis 60 Kilometern. Die Re-
Die Bereitstellung hochgenauer Koordinaten, insbeson- präsentation der fehlerbereinigten entfernungsunabhängi-
dere in der Höhenkomponente, sind essenzielle Quali- gen Korrekturdaten erfolgt im Beobachtungsraum (OSR)
tätsziele. Diese sind zur Erledigung der gesetzlichen Auf- mittels Verfahren der Flächenkorrekturparameter (FKP),
gaben des BSH von hoher Wichtigkeit, besonders in der Virtueller Referenzstation (VRS) oder Master Auxillia-
ry Concept (MAC)
(Bauer 2018). Dem
Nutzer werden Kor-
rekturdaten zuge-
wiesen, mit denen
eine Positionslösung
im 1- bis 3‑cm-
Niveau für die Lage-
und Höhenkompo-
nente möglich ist.
Diese Verfahren
sind etabliert und
haben sich als robust
erwiesen. Sie errei-
chen aber ihre Gren-
zen durch notwen-
dige bi‑direktionale
Kommunikations-
verbindungen zwi-
Basierend auf Heckmann und Jahn 2014 schen Referenzsta-
Abb. 2: Prinzipskizze globaler und regionaler Lösungsansätze hochgenauer GNSS-Positionierungs tionen und Rovern.
verfahren Die Limitierung
© Wißner-Verlag DVW | zfv 2/2021 146. Jg. | 127
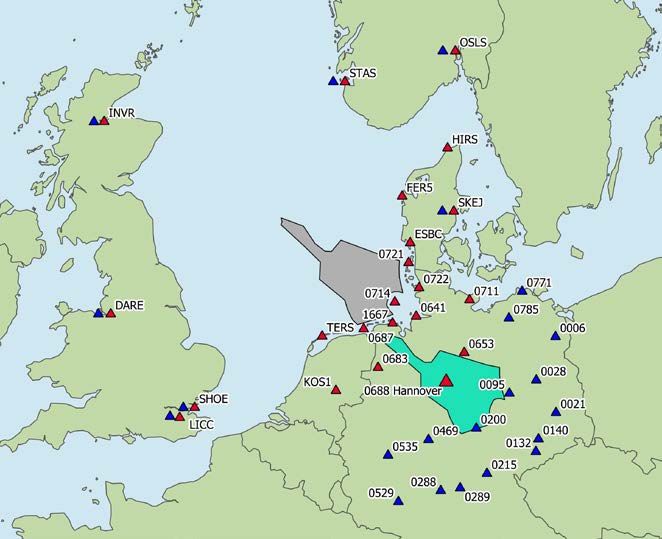
Fachbeitrag Jahn et al., SSR-RTK – Korrekturdatendienst für hochgenaue Positionierung … derartiger Techniken ist nicht zuletzt durch die verwendete zu einer hochgenauen Lösung verarbeiten kann. Als Rück- Telekommunikation gegeben, bei der nur eine begrenzte fallebene ist es möglich, die SSR-basierten Korrekturen in Anzahl paralleler Kommunikationsverbindungen mög- konventionelle RTCM3-Korrekturen (RTCM 2016) im Be- lich ist. Außerdem steigt die erforderliche Bandbreite der obachtungsraum zu transformieren (Wübbena et al. 2005). zu übertragenen Korrekturdaten mit der stark steigenden Einen wesentlichen Meilenstein dieses Projektes bilden Anzahl von verfügbaren Satelliten, weil immer die Summe umfangreiche Testmessungen (vgl. Abb. 1, Teilprojekt Q3 aller entfernungsabhängigen Fehlerkomponenten mit ho- 2021), die mit einem Vermessungsschiff des BSH (Abb. 4) her Datenrate zum Nutzer übertragen wird. innerhalb der AWZ der Nordsee durchgeführt werden sol- Um diese Grenzen zu beseitigen, haben Wübbena et al. len. Dabei werden einerseits die Parameter der geforderten (2005) das Verfahren PPP-RTK (Precise Point Positioning- Qualitätsziele, andererseits die Übertragung der SSR-Mo- Real Time Kinematic) eingeführt, das systematische Fehler dellparameter aus der Vernetzung zum Rover mittels Kom- mit unterschiedlichen räumlichen und zeitlichen Eigen- munikationsverfahren näher untersucht. schaften modelliert und im Zustandsraum zur Positionie- Da Schiffszeiten aus wirtschaftlichen Gründen nur rung eines einzelnen Empfängers performant bereitstellt. in begrenztem Maße zur Verfügung stehen, wurde ein Das Verfahren ist eine grundsätzliche Weiterentwicklung zweites Vernetzungsgebiet konzipiert und umgesetzt. In des Standard-PPP-Verfahrens (Bauer 2018), das in Abb. 2 Abb. 3b ist dieses als Süd-Vernetzung benannte Testgebiet (blau) dargestellt ist. Die Ansätze für die SSR-Generierung dargestellt, das während der gesamten Projektlaufzeit für können unterschiedlich sein. So wird oftmals eine Kombi- Untersuchungen bereitsteht. Das Design der Süd-Vernet- nation von SSR-Parametern aus globalen und regionalen zung wurde dem der Nordsee-Vernetzung weitgehend an- Berechnungen unter PPP-RTK verstanden. gepasst. Es verwendet SAPOS-Referenzstationen mit einer Das im Rahmen dieses F&E-Projektes eingesetzte Ver- nach Süd-Osten verschobenen Netzgeometrie. Dadurch fahren bestimmt sämtliche SSR-Parameter konsistent kann das vermeintliche Gebiet der AWZ in der Nordsee und vollständig aus den GNSS-Daten der verwendeten Referenzstationen. Als Unterscheidung wird der Begriff SSR‑RTK verwendet, der eine rigorose Umsetzung des PPP-RTK-Ansatzes darstellt. 4 Aufbau der Testumgebung und einer Monitoringstation Da die Verfügbarkeit von GNSS-Referenzstationen inner- halb der AWZ der Nordsee nicht gegeben ist, muss für das Pilotgebiet eine alternative Variante zu den herkömm- lichen, gleichmäßig verteilten Referenzstationen gewählt werden (vgl. Landstationen in Abb. 3a). Dazu wird das Ge- biet der AWZ in der Nordsee mit einem weit- und einem engmaschigen Netz von GNSS-Referenzstationen um- a schlossen und die GNSS-Daten werden in der Software GNSMART (Geo++ 2020a) verarbeitet. Die unterschied- lichen Entfernungen innerhalb des Netzes (vgl. Abb. 3a/3b) entsprechen im dichten Netzteil denen des SAPOS-Netzes, ergänzt um Stationen in Dänemark und den Niederlanden; im weitmaschigen Teil des Netzes, mit Stationen in Groß- britannien und Südnorwegen, ergeben sich Entfernungen bis zu 900 km. Bedingt durch die ungleichförmige Verteilung der GNSS-Referenzstationen bietet sich das Verfahren der SSR- basierten Positionierung im Zustandsraum für das Gebiet der AWZ der Nordsee geradezu an. Der Nutzer ist nicht mehr gezwungen, sich an eine nahegelegene Referenz- station anzuschließen, sondern kann durch den Empfang und die Verarbeitung der einzelnen Modellparameter die Position seines Rovers im Sinne einer Einzelstationslösung b hochgenau bestimmen. SSR-basierte Korrekturen sind Abb. 3a/3b: Referenzstationsnetz im Bereich der Nordsee grundsätzlich broadcast-fähig. Voraussetzung ist allerdings (Nordsee-Vernetzung) und im Bereich des Festlands (Süd-Ver- ein Endgerät, das die vollständige Modellinformation auch netzung) 128 | zfv 2/2021 146. Jg. | DVW © Wißner-Verlag

Jahn et al., SSR-RTK – Korrekturdatendienst für hochgenaue Positionierung … Fachbeitrag
Die Monitoringstation ermöglicht den Vergleich der
SSR-RTK-Lösung mit herkömmlichen SAPOS-HEPS-
Lösungen. Wie in Abb. 5 zu erkennen ist, wird dabei der
Empfänger 1 mit RTCM3-Korrekturdaten aus dem Stan-
dardbetrieb von SAPOS-Niedersachsen versorgt. Dessen
Koordinatenlösungen lassen sich mit unterschiedlichen
Repräsentationen aus der Süd-Vernetzung vergleichen.
Die Monitoringstation liefert damit nicht nur Informatio-
nen über den grundsätzlichen Lösungszustand der Ver-
netzungsumgebung, sondern dient auch als Nachweis der
Qualitätsanforderungen des Auftraggebers.
© BSH
Abb. 4: Vermessungsschiff KOMET des BSH im Einsatz in der 5 Erste Testmessungen und Ergebnisse
Nordsee
Die GNSS-Vernetzung mit dem Geo++ GNSMART-Paket
vollständig auf Land abgebildet werden und steht für die und weitere Betriebssoftware wurde auf einem Cloud-
gesamte Projektlaufzeit für unterschiedlichste Messungen rechner installiert. Der Vorteil dieser Lösung liegt in der
zur Verfügung. einfachen Skalierbarkeit und der Performanz des Systems.
In der Süd-Vernetzung wird die Station »0688 Hanno- Weiterhin können alle Projektbeteiligten von jedem Stand-
ver« als Monitoringstation (Abb. 3b, Abb. 5) betrieben. ort aus mit Zugang zum Internet und der erforderlichen
Unterschiedliche GNSS-Empfänger sind über einen An fachlichen und IT‑sicherheitsrelevanten Berechtigung auf
tennensplitter an einer gemeinsamen GNSS-Antenne an- das System zugreifen.
geschlossen und werden dauerhaft (24/7) betrieben. Durch Die Daten der deutschen SAPOS-Stationen und der
die hochgenauen Referenzkoordinaten des Antennenträ- europäischen Referenzstationen werden in Echtzeit im
gers, die mit SAPOS-HEPS bestimmt wurden, steht eine Format RTCM3 über das Internet übertragen. Im Multi-
genaue Referenz für Analysen zur Verfügung. GNSS-Auswerteansatz werden die Beobachtungen von
In der Grundkonfiguration der Monitoringstation wer- GPS, GLONASS, Beidou und Galileo verwendet. Für eine
den Korrekturmodelle aus der Süd-Vernetzung im Format optimale Performanz innerhalb der Prozesskette und zur
SSRZ (Geo++ 2020b) dem Empfänger 2 bereitgestellt. Da Modellierung der SSR-Modellparameter müssen bei-
gegenwärtig eine direkte Verarbeitung von SSRZ nur in spielsweise die Koordinaten sämtlicher Referenzstationen
Prototyp-Konfigurationen, jedoch noch nicht von han- in einem homogenen, einheitlichen Koordinatensystem
delsüblichen Empfängern zur Verfügung steht, erfolgt bereitstehen. Diese Berechnungen finden außerhalb des
eine Formatumwandlung auf einem Laptop (siehe Abb. 5 eigentlichen Vernetzungsprozesses statt. Nach einer aus-
»SSR2OBS«). Dabei werden die modellbasierten Zustands- reichenden Trainingsphase aller Parameter innerhalb der
parameter aus der SSR-Vernetzung in ein Standardkorrek- Vernetzung, stehen die SSR-Modellparameter über stan-
turdatenformat RTCM3 gewandelt, das von jedem Emp- dardisierte NTRIP-Schnittstellen (Networked Transport of
fänger zu einer Positionslösung verarbeitet werden kann. RTCM via Internet Protocol, RTCM 2011) für die Testmes-
Für diesen Übergang vom Zustands- in den Beobachtungs- sungen bereit.
raum liefert der Empfänger seine Positionen und Epheme- In verschiedenen Testszenarien werden im Projekt
riden der Satelliten. Somit können auch verschiedene Ro- unterschiedliche Ansätze zum Einsatz kommen. Im ersten
ver in Testmessungen eingesetzt werden. Schritt wird die grundsätzliche Funktionalität des Gesamt-
prozesses untersucht. Erste Ergebnisse
dieses Tests auf Grundfunktionalität sind
im Vergleich der Positionierung der Mo-
nitoringstation mit SSRZ aus der Süd-
Vernetzung in Bezug auf den Mittelwert
der jeweiligen Datenreihe erfolgreich
(vgl. Abb. 3b, Abb. 6).
Die Qualitätswerte der in Abb. 6 dar-
gestellten Höhen- und Lageabweichun-
gen betragen für den optimistischen,
statischen Funktionstest auf Land 3 cm,
bzw. 2 cm für die Standardabweichung in
der Höhen- und den Lagekomponenten.
Es gilt nun, diese Qualitäten im weiteren
Abb. 5: Schematische Darstellung der Monitoringstation Hannover
© Wißner-Verlag DVW | zfv 2/2021 146. Jg. | 129Fachbeitrag Jahn et al., SSR-RTK – Korrekturdatendienst für hochgenaue Positionierung …
a b
Abb. 6a/6b: Höhen- und Lageabweichungen der Monitoringstation in der Süd-Vernetzung, erster grundsätzlicher, statischer
Funktionstest, Vergleich zum Mittel über ca. 22 Stunden
Verlauf des Projektes in den unterschiedlichen Testszena- Bauer, M. (2018): Vermessung und Ortung mit Satelliten. 7. Aufl.,
rien zu bestätigen. Wichmann, 253 f.
Ellmer, W. (2013): RTK in Referenznetzen auf See – Fokus Kommuni-
In den SSR-Vernetzungen werden über einen SSR2OSR-
kation. In: DVW e. V. (Hrsg.): GNSS 2013 – Schneller. Genauer. Effi-
Wandler (Wübbena et al. 2005) die SSR-Modellparame- zienter. DVW-Schriftenreihe, Band 70, 181–188.
ter vom Zustands- in den Beobachtungsraum gewandelt. Geo++ (2020a): www.geopp.de/gnsmart, letzter Zugriff 12/2020.
Dieser Schritt ist notwendig, da kein standardisiertes SSR- Geo++ (2020b): Geo++ State Space Representation Format (SSRZ). Ver-
Datenformat existiert, das alle notwendigen Modellpara- sion 1.0, 21. September 2020, Geo++ GmbH, Garbsen. www.geopp.
de/ssrz, letzter Zugriff 12/2020.
meter für die angestrebten Genauigkeiten bereitstellen
Heckmann, B., Jahn, C.-H. (2014): Geodätischer Raumbezug. In: Kum-
kann. Das offene Geo++ SSRZ-Format (Geo++ 2020b) stellt mer/Kötter/Eichhorn (Hrsg.): Das deutsche Vermessungs- und Geo-
sämtliche SSR-basierten Korrekturen bereit, die ein Rover informationswesen 2015, Wichmann, Berlin-Offenbach, 255–323.
sonst nur als konventionelle RTCM3-Korrekturen erhält. Jahn, C.-H., Riecken, J., Trautvetter, C., Freitag, M., Kurtenbach, E., Fa-
Im weiteren Verlauf des F&E-Projektes wird angestrebt, die bian, G., Dick, H.-G. (2017): Quo vadis SAPOS®? – Zukünftige Ent-
wicklungen des Positionierungsdienstes der Landesvermessung. In:
SSR-Modellparameter der Vernetzung direkt einem Ro- DVW e. V. (Hrsg.): GNSS 2017 – Kompetenz für die Zukunft. DVW-
ver bereitzustellen und für die Positionierung zu nutzen. Schriftenreihe, Band 87, 133–150.
RTCM (2011): RTCM Standard 104010.1, Networked Transport of
RTCM via Internet Protocol (Ntrip) – Version 2.0, June 28, 2011.
RTCM (2016): RTCM Standard 10403.3, Differential GNSS (Global
6 Ausblick
Navigation Satellite Systems) Services – Version 3, October 7, 2016.
Wübbena, G., Schmitz, M., Bagge, A. (2005): PPP-RTK: Precise Point
Ein Schwerpunkt des zweijährigen F&E-Projektes ist der Positioning Using State-Space Representation in RTK Networks. 18th
Nachweis der hohen Positionierungsgenauigkeit eines International Technical Meeting, ION GNSS-05, September 13-16,
GNSS-basierten Echtzeitdienstes unter Verwendung des 2005, Long Beach, California. www.geopp.com/pdf/ion2005_fw.pdf,
letzter Zugriff 12/2020.
SSR-RTK-Ansatzes für die AWZ in der Nordsee. Dazu wer-
den nach den ersten vorgestellten, erfolgreichen Ergebnis-
sen umfangreiche Testmessungen mit unterschiedlichen Kontakt
Dr. Cord-Hinrich Jahn | M. Sc. Robert Schumann
Messungsszenarien, in kinematischen Anwendungen und
Zentrale Stelle SAPOS beim Landesamt für Geoinformation und
Nachbilden von Schiffsbewegungen durchgeführt. Da- Landesvermessung Niedersachsen
bei wird als Kommunikationsmedium satellitengestütztes Podbielskistraße 331, 30659 Hannover
Internet ohne eine Einschränkung hinsichtlich der Band- cord-hinrich.jahn@lgln.niedersachsen.de
breite der zu übertragenen SSR-Korrekturen eingesetzt robert.schumann@lgln.niedersachsen.de
werden. SSR-basierte Dienste können aufgrund ihre Bro- Dipl.-Ing. Bernd Vahrenkamp
adcastfähigkeit auch alternative Kommunikationsmedien Bundesamt für Seeschifffahrt und Hydrographie
eingeschränkter Bandbreite nutzen. Dies ist ein weiterer Bernhard-Nocht-Straße 78, 20359 Hamburg
bernd.vahrenkamp@bsh.de
Aspekt der SSR-Technologie, der für Aufgaben im Bereich
der Nordsee zukünftig untersucht werden kann. Dr.-Ing. Patrick Westfeld
Bundesamt für Seeschifffahrt und Hydrographie
Neptunallee 5, 18057 Rostock
patrick.westfeld@bsh.de
Literatur
AdV (2019): Produktdefinition SAPOS. www.adv-online.de/AdV-Pro Dr. Gerhard Wübbena | Dr. Martin Schmitz | M. Sc. Christoph Wallat
dukte/Integrierter-geodaetischer-Raumbezug/SAPOS/binarywriter Geo++ GmbH, Steinriede 8, 30827 Garbsen
servlet?imgUid=a9770a75-b667-ad61-f27f-31c403b36c4c&uBas gerhard.wuebbena@geopp.de
Variant=11111111-1111-1111-1111-111111111111, letzter Zugriff martin.schmitz@geopp.de
12/2020. christoph.wallat@geopp.de
130 | zfv 2/2021 146. Jg. | DVW © Wißner-Verlag Dieser Beitrag ist auch digital verfügbar unter www.geodaesie.info.Sie können auch lesen