Geschwindigkeitsradar basierend auf Time-of-Flight Technologie
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Bachelorarbeit
Geschwindigkeitsradar basierend auf
Time-of-Flight Technologie
Dokumentation über den Entwurf und Bau eines optischen Geschwindigkeitssensors
zur Erlangung des akademischen Grades Bachelor of Science in Systemtechnik an
der Interstaatlichen Hochschule für Technik Buchs SG.
Verfasser: Michael Furxer
Philipp Bruhin
Vertiefungsrichtung: Elektronik und Regelungstechnik
Industriepartner: CEDES AG, Landquart
Referent: Dipl.-Ing. Laszlo Arato
Korreferent: Dipl.-Ing. Kurt Schenk
Datum: 13. August 2010
Zusammenfassung
Zusammenfassung
Der unbestrittene Wunsch nach mehr Lebensqualität in unseren Städten und Dörfern
ist eng verknüpft mit grösserer Verkehrssicherheit, sowie weniger Lärm und Abgasen.
Diese Bedürfnisse sind mit dem Drang nach Mobilität vereinbar, wenn die Chancen der
Mobilität genutzt und deren Risiken gleichzeitig minimiert werden. Genau auf diesem
Leitmotiv baut diese Bachelorarbeit auf.
Zur Verkehrsberuhigung in Tempo-30-Zonen haben wir zusammen mit unserem In-
dustriepartner CEDES AG aus Landquart einen Geschwindigkeitssensor entwickelt,
der die Geschwindigkeit von allen Verkehrsteilnehmern messen kann, egal ob Mofa-
fahrer oder LKW.
Als Grundlage verwenden wir ein low cost 3D-Kamerasensor von CEDES, der mit der
Time-of-Flight Technologie arbeitet. Der Sensor sendet ein moduliertes Signal im Infra-
rotbereich und berechnet aus der phasenverschobenen Reflexion ein Umgebungsbild
mit echten Distanzinformationen.
Den 3D-Kamerasensor haben wir so umgebaut, dass er aus der Ableitung der Distanz
über die Zeit die Geschwindigkeit ermitteln kann. Eine der grössten Herausforderungen
bestand darin, genügend optische Leistung auszusenden, sodass das reflektierte Infra-
rotlicht klar ausgewertet werden kann. Es zeigte sich, dass mit einer optischen Leis-
tung von 10 W eine Reichweite von etwa 70 m erreicht wird. Eine Hauptschwierigkeit
stellte das Herausfiltern und Verfolgen eines Verkehrsteilnehmers auf dem Kamerabild
dar. Mit der Bildverarbeitungs-Toolbox von MATLAB gelang es jedoch, dieses Problem
zu lösen.
Versuche unter verschiedenen Bedingungen im öffentlichen Verkehr lieferten erstaunli-
che Ergebnisse. Als Messpunkte werden gut reflektierende Bauteile wie Nummern-
schilder oder Rücklichter detektiert. Eingeschaltete Scheinwerfer wirken störend und
erschweren die Messung. Anfängliche Befürchtungen, dass das Signal durch Sonnen-
licht beeinträchtigt wird, bewahrheiteten sich nicht. Bei Geschwindigkeiten bis 40 km/h
wird eine Genauigkeit von ±1 km/h erreicht.
Eine rationale Betrachtung der Ergebnisse zeigt, dass es sicherlich noch einige Her-
ausforderungen zu bewältigen gäbe, um dieses Produkt zur Serienreife zu führen. Die
Vorteile gegenüber einem konventionellen Radarsystem sind jedoch beträchtlich. Das
Produkt kann kompakt und kostengünstig hergestellt werden und es können Ver-
kehrsteilnehmer verschiedener Grösse detektiert werden.
Seite i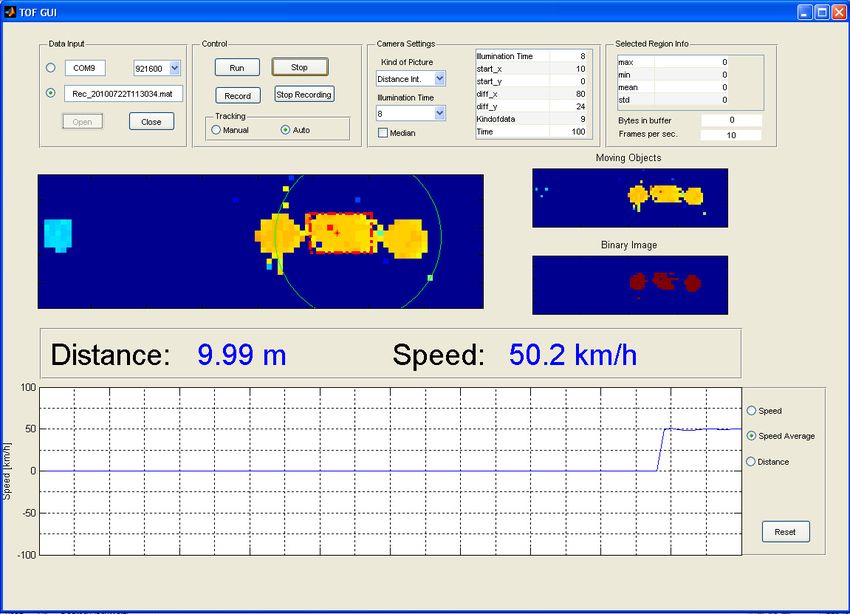
Summary
Summary
The undisputed desire for better quality of life in our towns and villages is closely linked
with greater traffic safety, lower noise and less exhaust fumes. These needs are com-
patible with the urge for mobility, if the use of mobility opportunities and their risks are
minimized simultaneously. Our Bachelor Thesis is based on exactly this issue.
Together with our industrial partner CEDES AG in Landquart we have developed a
speed sensor that can measure the speed of all motorized road users, whether moped
riders or trucks.
As a basis we use a low cost 3D camera sensor from CEDES with Time-of-Flight tech-
nology. The sensor sends a modulated signal in the infrared range and calculates a
picture from the phase-shifted reflection with real distance information.
We have modified the 3D camera sensor, so that it can determine the speed by diffe-
rentiating the distance over time. One of the biggest challenges was to emit enough
optical power so that the reflected infra-red light can be analyzed clearly. It was found
that with an output power of 10 W a distance of about 70 meters can be achieved. A
major difficulty was filtering out and tracking a road participant on the camera image.
With the image processing toolbox of MATLAB, however, we managed to solve this
problem.
Experiments under different conditions in public transport provided astonishing results.
Reflective components such as license plates or tail lights are detected as measuring
points. Activated headlights act interfering with the process and make measuring diffi-
cult. Initial concerns that the signal is affected by sunlight proved not to be true. At
speeds up to 40 km/h an accuracy of ± 1 km/h is achieved.
A rational analysis of the results shows that there are probably still some challenges to
deal with, to make this product ready for production. The advantages over a conven-
tional radar system are considerable. The product can be made compact and inexpen-
sive. Furthermore, it can measure road users of different sizes.
Seite ii
Eidesstattliche Erklärung
Eidesstattliche Erklärung
Hiermit versichern wir, die vorliegende Studienarbeit eigenständig und unter Verwen-
dung der angegebenen Hilfsmittel durchgeführt zu haben.
Michael Furxer: Datum: 13. August 2010
Philipp Bruhin: Datum: 13. August 2010
Seite iii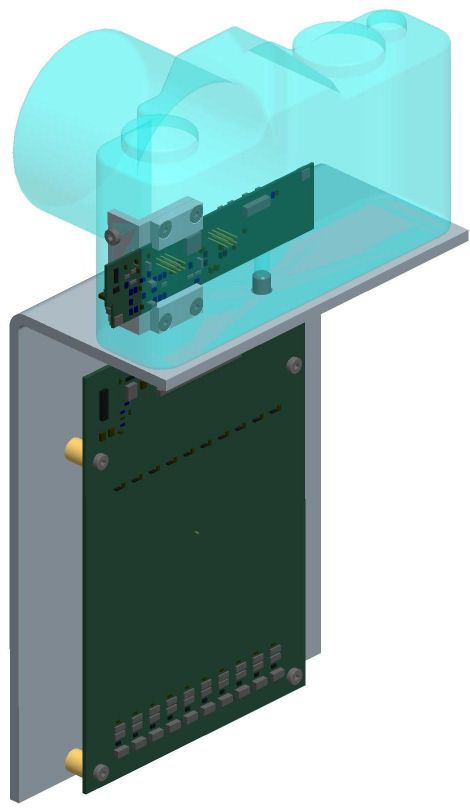
Inhaltsverzeichnis
Inhaltsverzeichnis
1 Offizielle Aufgabenstellung ................................................................................ 1
1.1 Allgemeine Beschreibung............................................................................... 1
1.2 Ziel der Arbeit................................................................................................. 1
1.3 Der Industriepartner CEDES AG .................................................................... 2
2 Einführung in das Funktionsprinzip .................................................................. 3
2.1 Time-of-Flight Technologie ............................................................................. 3
2.2 TOF Anwendung beim Sensor IMS 100 von CEDES ..................................... 4
2.3 Prinzip der Geschwindigkeitsmessung ........................................................... 7
2.4 Hardwarebeschreibung CEDES TOF Kamerasensor IMS 100 ....................... 9
3 Evaluation und Aufbau Geschwindigkeitssensor ............................................11
3.1 Elektronischer Aufbau ...................................................................................12
3.1.1 Hardwarekomponenten 10-LED-Print.....................................................13
3.1.2 Berechnungen und Schaltungsbeschreibung 10-LED-Print ....................14
3.1.2.1 Testresultate und Folgerungen 10-LED-Print ..................................16
3.1.3 Augensicherheit und optische Leistung ..................................................16
3.1.4 Aufbau definitiver Beleuchtungsprint ......................................................17
3.2 Mechanischer Aufbau Geschwindigkeitssensor.............................................19
4 Software ..............................................................................................................20
4.1 DSP Software ...............................................................................................20
4.1.1 Zeitmessung ..........................................................................................21
4.1.2 Reichweite .............................................................................................21
4.1.3 Bildrate...................................................................................................21
4.2 Objektverfolgung ...........................................................................................23
4.2.1 Stillstehende Objekte entfernen .............................................................23
4.2.2 Binärbild erzeugen .................................................................................25
4.2.3 Entfernung messen ................................................................................26
4.2.4 Geschwindigkeit berechnen ...................................................................27
4.3 Benutzeroberfläche .......................................................................................28
Seite iv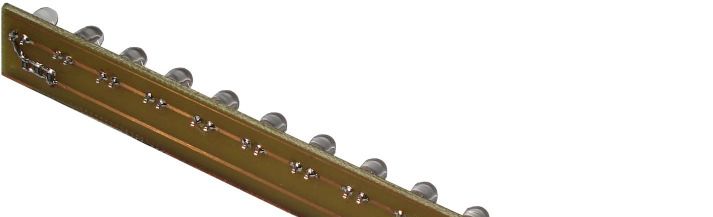
Inhaltsverzeichnis
4.3.1 Datenquelle ............................................................................................28
4.3.2 Programmsteuerung ..............................................................................29
4.3.3 Aufnahme ..............................................................................................29
4.3.4 Kameraeinstellungen .............................................................................29
4.3.5 Anzeige der Ergebnisse .........................................................................30
5 Mess- und Testergebnisse ................................................................................31
5.1 Beleuchtung ..................................................................................................31
5.2 Distanzgenauigkeit ........................................................................................34
5.3 Reichweite ....................................................................................................37
5.4 Fremdlichteinflüsse .......................................................................................38
5.5 Geschwindigkeitsgenauigkeit ........................................................................39
6 Kundennutzen ....................................................................................................42
7 Schlussfolgerung und Ausblick ........................................................................43
8 Danksagung........................................................................................................44
Glossar.......................................................................................................................45
Abbildungsverzeichnis .............................................................................................46
Tabellenverzeichnis ..................................................................................................47
Formelverzeichnis .....................................................................................................47
Literaturverzeichnis ..................................................................................................48
Seite v
1 Offizielle Aufgabenstellung
1 Offizielle Aufgabenstellung
Mit der 3D-Kameratechnologie Time-of-Flight, abgekürzt TOF, lässt sich die Distanz
zwischen Kamera und einem Objekt sehr genau ermitteln. Die Firma CEDES hat Ka-
merachips entwickelt, welche in der Lage sind, aus einem Umgebungsbild die Distanz-
information für jedes einzelne Pixel aufzuzeichnen. Aus diesen Distanzinformationen
kann man mithilfe der ersten Ableitung über die Zeit auf die Geschwindigkeit eines Ob-
jektes schliessen.
1.1 Allgemeine Beschreibung
Die TOF-Technologie soll die Basis für ein Mess- und Anzeigesystem sein, das die
Geschwindigkeit von Fahrzeugen in Tempo-30-Zonen erfasst und darstellt. Die Neuheit
dieser Anwendung besteht darin, dass die Messung nicht auf Mikrowellen, sondern auf
Infrarotwellen mit einer Wellenlänge von 850 nm basiert. Das Spektrum für elektro-
magnetische Wellen kann der Abbildung 1-1 entnommen werden. Als Grundlage für
die Schaltung dient ein Sensorboard von CEDES. Neu entwickelt werden muss die
Sende- und Empfangsoptik, die Beleuchtungselektronik, die Sensor-Auswertesoftware
sowie eine Anzeigeeinrichtung. Als Stromzufuhr kann von einer 24 VDC Laborversor-
gung ausgegangen werden.
Abbildung 1-1: Spektrum elektromagnetische Wellen
1.2 Ziel der Arbeit
Mit dieser Arbeit soll aufgezeigt werden, dass ein robustes und kostengünstiges Ge-
schwindigkeitsmesssystem, basierend auf der TOF-Technologie, realisiert werden
kann. Als Ziel der Arbeit soll ein System, bestehend aus einem Geschwindigkeitssen-
sor, integriert in einer Anzeige vorliegen. Es sollen Geschwindigkeiten im Bereich von
10 bis 99 km/h gemessen und angezeigt werden können. Widrige Umgebungsverhält-
nisse wie starke Sonneneinstrahlung, Dunkelheit oder Nebel sollen das Messergebnis
nicht beeinträchtigen. Die Einsatzreichweite soll mindestens 50 m betragen. Zudem
soll die Grösse des Messfehlers quantifiziert werden. Mögliche Massnahmen zur Un-
terdrückung von Falschanzeigen sind ebenfalls Bestandteil der Aufgabe. Planung und
Vorgehensweise liegen dem Anhang bei.
Seite 11 Offizielle Aufgabenstellung
1.3 Der Industriepartner CEDES AG
Die Firma CEDES aus Landquart entwickelt seit 1986 innovative Lösungen für Si-
cherheits- und Informationssysteme, Überwachungen, industrielle Rechner und Steue-
rungen. Dabei arbeitet CEDES mit optischen Sensoren auf Basis der aktiven Infrarot-
technik und der Bildverarbeitung.
Die Produkte gliedern sich in zwei Bereiche:
• Aufzugsindustrie
CEDES ist ein weltweit anerkannter Lieferant von Komfort- und Sicherheitssen-
sorik in der Aufzugskabine sowie von anspruchsvoller Sensorik für die Positio-
nierung und Sicherheitsüberwachung im Aufzugsschacht.
• Tür- und Torindustrie
Auf dem Markt von Sensorlösungen für Tür und Tor bietet CEDES zuverlässige
Sensoren zur Türüberwachung, Industrieabsicherung oder auch Zutrittkontroll-
systeme und Sensorschleusen an.
Seite 22 Einführung in das Funktionsprinzip
2 Einführung in das Funktionsprinzip
Die von CEDES angewendete Time-of-Flight Technologie für Distanzkameras wurde
im Jahr 2000 durch Robert Lange an der Universität-Gesamthochschule Siegen im
Rahmen einer Doktorarbeit erforscht. Seine Analysen sind im elektronischen Anhang
[1] abgelegt. In diesem Kapitel wird in einem ersten Teil auf die TOF-Technologie all-
gemein eingegangen, danach folgt die Beschreibung der spezifischen Anwendung für
die Geschwindigkeitskamera.
2.1 Time-of-Flight Technologie
Beim TOF Prinzip wird mittels der Zeitdifferenz vom Aussenden eines optischen Sig-
nals bis zum Wiedereintreffen auf die Distanz zwischen Sensor und Target geschlos-
sen (Formel 1).
∙ Δt
= Formel 1
2
: Distanz [m]
: Lichtgeschwindigkeit (299’792’458 m/s)
Δt: Zeitdifferenz [s]
Eine schematische Darstellung für einen möglichen TOF Sensor wird in Abbildung 2-1
gezeigt.
Abbildung 2-1: Schematischer Aufbau eines Geschwindigkeitssensors
Wird mittels einer LED ein optisches Signal ausgesendet, startet gleichzeitig eine Zeit-
messung. Das Signal wird vom Zielobjekt reflektiert und fällt auf die Fotodiode zurück,
die Zeitmessung wird gestoppt. Das Licht legt in 6.67 ns einen Meter zurück. Mit dieser
Information ergibt sich die Distanz und durch die Ableitung über die Zeit, die Ge-
schwindigkeit.
Seite 32 Einführung in das Funktionsprinzip
Anstatt die Zeitdifferenz zu messen, kann man auch die Phasenverschiebung einer
optischen Schwingung messen, um den Abstand zwischen Sensor und Target zu er-
mitteln. Sendet man beispielsweise eine optische Sinusschwingung aus, wird diese
Schwingung am Zielobjekt reflektiert, visualisiert in Abbildung 2-2. Das reflektierte Sig-
nal weist eine Phasenverschiebung zum ausgesendeten Signal auf. Mit der Laufzeit
des Lichtes und der Phasenverschiebung kann man auf die Distanz zwischen Sensor
und Target schliessen.
Δφ
= ∙
2∙ 2 Formel 2
: Frequenz des modulierten Signals [Hz]
Δφ Phasenverschiebung [rad]
Abbildung 2-2: Phasenverschiebung beim TOF Prinzip
Der in dieser Bachelor-Arbeit als Grundlage dienende Sensor IMS 100 von CEDES
baut auf dem beschriebenen Effekt auf. Er misst jedoch nicht nur die Distanz eines
einzelnen Punktes, sondern den Distanzwert jedes einzelnen Kamerapixels. Somit
erhält man ein 3D-Bild der Situation.
2.2 TOF Anwendung beim Sensor IMS 100 von CEDES
Die Phasenverschiebung wird beim IMS 100 Sensor von CEDES durch Integration der
reflektierten optischen Sinusschwingung gemessen. Die Schwingungsfrequenz beträgt
20 MHz. Wie in Abbildung 2-3 auf der folgenden Seite gezeigt, wird keine permanente
Sinusschwingung ausgesendet. Das Signal wird je nach Konfiguration nur ca. 5 bis
50 ms ausgesendet.
Seite 42 Einführung in das Funktionsprinzip
Abbildung 2-3: Sinusschwingung nur während bestimmter Zeit
Die reflektierten Photonen erzeugen unter dem Photogate des CCD-Kamerachips freie
Elektronen. Die Elektronen werden in sogenannten Taps gesammelt, was eine Integra-
tion über die Zeit bedeutet. Pro Pixel gibt es zwei Taps, wobei abwechselnd bei 0°,
90°, 180° und 270° eine Integration gestartet wird. Abbildung 2-4 zeigt in grauer Farbe
die ausgestrahlte Sinusschwingung, die reflektierte Schwingung wird rot dargestellt.
Intensität
Intensität
Intensität
Intensität
Abbildung 2-4: Integration der einfallenden optischen Sinusschwingung
Das Signal wird durch die beiden Taps während der Belichtungszeit von 5 bis 50 ms
integriert. Der Wert des ersten Belichtungsimpulses wird auf A0 und A2 aufgeteilt, der
zweite Belichtungsimpuls auf A1 und A3. Nach den Integrationen während zwei Belich-
Seite 52 Einführung in das Funktionsprinzip
tungsimpulsen kann die effektive Phasenverschiebung mit Formel 3 berechnet werden.
Es gilt zu beachten, dass die Taps bei zu grosser Belichtungszeit in die Sättigung gera-
ten, die Pixel übersteuern dann.
0 − 2
Δφ = Formel 3
3 − 1
A0: φ
A1: φ
A2: φ
A3: φ
Eine entsprechende Visualisierung findet sich in Abbildung 2-5.
Abbildung 2-5: Ermittlung der Phasenverschiebung mit Arcustangensfunktion
Damit ein allfälliger Fehler durch unterschiedliches Integrationsverhalten der Pixel un-
terdrückt werden kann, wird jedes 90°-Segment von beiden Taps je einmal integriert.
Der Durchschnitt beider Taps wird zur Berechnung der Phasenverschiebung verwen-
det.
Mit dem gleichen Verfahren kann auch die Amplitude des reflektierten Signals nach
Formel 4 berechnet werden. Mit dieser Information kann für jedes Pixel zusätzlich zum
Distanzbild auch das Grauwertbild aufgenommen werden.
A = !(A0 − A2) + (A1 − A3) Formel 4
: Amplitude des reflektierenden Signals (Grauwert)
Die Wellenlänge der ausgesendeten Sinusschwingung bei einer Modulationsfrequenz
von 20 MHz beträgt 15 m (Formel 5). Folglich kann der IMS 100 Distanzen von 7.5 m
messen1. Danach beträgt die Phasenverschiebung wieder 0 ° und die Distanz beginnt
wieder bei 0 m. Beispielsweise wird bei einem Objekt, welches in Realität 10 m entfernt
ist, eine Distanz von 2.5 m gemessen.
1
Hin- und Rückweg betragen je 7.5 m, die Wellenlänge ist 15 m.
Seite 62 Einführung in das Funktionsprinzip
299′792′458 m/s
λ= = ≈ 154 Formel 5
20 ∙ 100 12
λ: Wellenlänge [m]
: Aufmodulierte Frequenz [Hz]
2.3 Prinzip der Geschwindigkeitsmessung
Die Geschwindigkeit eines Objektes kann berechnet werden, wenn die zurückgelegte
Strecke des Objektes und die dafür benötigte Zeit bekannt sind. Wird die Distanz eines
bewegten Objektes fortlaufend gemessen, kann dessen Geschwindigkeit nach Formel
6 berechnet werden:
6 − 67
5= Formel 6
∆
v: Geschwindigkeit [m/s]
6 : Abstand aktuelles Distanzbild [m]
67
: Abstand altes Distanzbild [m]
∆: Zeitdifferenz zwischen aktuellem und altem Distanzbild [s]
Da sich, wie in Kapitel 2.2 beschrieben, die gemessene Distanz in einem bestimmten
Intervall wiederholt, ergibt sich durch die Aufnahmezeit und die Länge des kontinuierli-
chen Distanzintervalls eine Beschränkung der maximal messbaren Geschwindigkeit.
Ein Objekt darf sich zwischen zwei Messungen maximal ein halbes Distanzintervall
bewegen, um eine eindeutige Geschwindigkeitsmessung zu ermöglichen. Diese Be-
schränkung ergibt sich aus der Anwendung des Nyquist-Shannon-Abtasttheorems auf
den Distanzverlauf, der durch die sich wiederholenden Distanzintervalle eine periodi-
sche Schwingung darstellt. Wird das Abtasttheorem eingehalten, kann der Sprung von
7.5 m auf 0 m durch einfaches Addieren der Maximaldistanz (7.5 m) herausgerechnet
werden. Bewegt sich ein Objekt auf die Kamera zu, wird die Geschwindigkeit negativ
und es muss daher die Maximaldistanz vom Messwert subtrahiert werden. Die folgen-
den Abbildungen stellen den Sachverhalt anschaulich dar. Zur Berechnung der Dia-
gramme wurde eine Abtastzeit von 244 ms gewählt. Diese Zeit wird vom TOF-Sensor
mit Originalsoftware bei einer Belichtungszeit von 10 ms für die Aufnahme eines Bildes
benötigt. Die Maximalgeschwindigkeit in Abhängigkeit der Abtastzeit lässt sich nach
Formel 7 berechnen.
Seite 72 Einführung in das Funktionsprinzip
:; 7.54 4 B4
5 :; = = = 15.37 = 55.23 Formel 7
2 ∗ =>? 2 ∗ 0.244A A ℎ
5 :; : Maximal auswertbare Geschwindigkeit [m/s]
:; : Maximaler Abstand [m]
In Abbildung 2-6 und in Abbildung 2-7 beträgt die Geschwindigkeit des Objektes
30 km/h, das Abtasttheorem wird also eingehalten. Die gemessenen Geschwindigkei-
ten sind jeweils zwischen den beiden zugehörigen Distanzmesspunkten (rot) aufgetra-
gen. In Abbildung 2-6 wird die Geschwindigkeit ohne Berücksichtigung des Distanz-
sprunges berechnet und führt daher in jenem Intervall, indem der Sprung stattfindet zu
einer Fehlmessung. In Abbildung 2-7 wird dieser Fehler durch Addition von 7.5 m zum
zweiten Distanzmesswert vermieden.
Geschwindigkeit des Objekts: 30 km/h dt: 0.244 s
7
6 30
gemessene Distanz [m]
30
5
4 30
-80.7
30
3
2 30
30
1
0
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
Zeit [s]
Abbildung 2-6: Distanzmessung ohne Berücksichtigung Distanzsprung bei 30 km/h
Geschwindigkeit des Objekts: 30 km/h dt: 0.244 s
7
30
gemessene Distanz [m]
6
30
5
4 30
30
30
3
2 30
30
1
0
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
Zeit [s]
Abbildung 2-7: Distanzmessung mit Berücksichtigung Distanzsprung bei 30 km/h
Auf Abbildung 2-8 und Abbildung 2-9 wird das Abtasttheorem verletzt (Geschwindig-
keit: 60 km/h). Wenn ein Sprung stattfindet, ist eine Korrektur des Ergebnisses nicht
mehr möglich, da die Bewegungsrichtung nicht mehr eindeutig festgestellt werden
kann. In diesem Fall führt dies zu einem Messwert von -50.7 km/h anstelle der erwarte-
ten 60 km/h.
Seite 82 Einführung in das Funktionsprinzip
Geschwindigkeit des Objekts: 60 km/h dt: 0.244 s
7
6
gemessene Distanz [m]
5
4 60
-50.7
60
3
2
1
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Zeit [s]
Abbildung 2-8: Distanzmessung ohne Berücksichtigung Distanzsprung bei 60 km/h
Geschwindigkeit des Objekts: 60 km/h dt: 0.244 s
7
6
gemessene Distanz [m]
5
4 -50.7
-50.7
-50.7
3
2
1
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
Zeit [s]
Abbildung 2-9: Distanzmessung mit Berücksichtigung Distanzsprung bei 60 km/h
Um hohe Geschwindigkeiten messen zu können, ist es aus oben genannten Gründen
wichtig, die Bildaufnahmezeit möglichst kurz zu halten. Die Berechnungen können dem
M-File Speed_Aliasing.m entnommen werden.
2.4 Hardwarebeschreibung CEDES TOF Kamerasensor IMS 100
Der Kamerasensor besteht aus zwei Leiterplatten. Auf dem einen Print befinden sich
die Beleuchtung mit 16 Infrarot-LEDs und eine 5 V Spannungserzeugung. Ausgelegt ist
diese Konstruktion für Abstände bis zu 2.5 m, jedoch mit einem relativ breiten Ab-
strahlwinkel. Der Abstrahlwinkel der LEDs wird durch eine in das Kunststoffgehäuse
eingearbeitete Linse beeinflusst.
Der zweite Print beherbergt die Empfangsoptik, den CCD Chip und die Steuerungs-
elektronik. Zum Einsatz kommt ein DSP TMS320F2801 von Texas Instruments.
Der CCD Kamerachip besitzt eine maximale Auflösung von 24 x 100 Pixel. Die aktuelle
Firmware wertet jedoch nur 24 x 80 Pixel aus, da die Speichergrösse des DSP keine
höhere Auflösung zulässt. Die Framerate ist abhängig von der eingestellten Belich-
tungszeit und beträgt bei 10 ms Belichtungszeit ca. 5 Bilder pro Sekunde. Wird das Bild
über die serielle Schnittstelle übertragen, reduziert sich die Framerate auf 4 Bilder pro
Sekunde.
Seite 92 Einführung in das Funktionsprinzip
Der Arbeitsbereich des Kamerasensors beträgt 0.6 m bis 2.5 m. die Versorgungsspan-
nung ist 24 VDC.
Die Distanzbilder können mittels USB Verbindung und der TOF Visualization Software
(abgekürzt TVS) von CEDES auf dem PC angezeigt werden. Programmierung und
Debugging wird über die JTAG Schnittstelle ermöglicht.
Abbildung 2-10: CEDES 3D-Sensor IMS 100 [2]
Abbildung 2-10 zeigt den ungefähr 100 mm langen Kamerasensor, eingebettet in ein
robustes Kunststoffgehäuse. Das vollständige Elekronikschema sowie das PCB Layout
findet man im elektronischen Anhang unter CEDES › PCB_CEDES.
Seite 103 Evaluation und Aufbau Geschwindigkeitssensor
3 Evaluation und Aufbau Geschwindigkeitssensor
Für die geforderte Aufgabe ist der gegebene Aufbau ungeeignet. Der Abstrahlwinkel
muss klein sein, um eine Reichweite von mindestens 50 m zu erreichen. Dieser Forde-
rung wird mit einem neuen Beleuchtungskonzept Rechnung getragen.
Die durchdachte Konstruktion des IMS 100 erlaubt es, einen eigenständigen Beleuch-
tungsprint aufzubauen. Auf diesem Print wird zudem 5 VDC aus der 24 VDC Versor-
gungsspannung generiert. Ein Schnittstellenbeschrieb kann Abbildung 3-1 entnommen
werden.
Abbildung 3-1: Schnittstellenbeschreibung Beleuchtung und TOF-Print
Da der Beleuchtungsprint viel mehr Platz beansprucht, wurde ebenfalls eine neue Hal-
terung für den Sensor konstruiert. Eine alte Spiegelreflexkamera Minolta XD7 dient als
Optik für den CCD Chip. Verschiedene aufsteckbare Objektive bieten Flexibilität be-
züglich Brennweite und Blendengrösse in der Testphase.
Eine perspektivische Zeichnung des Aufbaus findet sich in Abbildung 3-2. Die Spiegel-
reflexkamera beherbergt den TOF-Print von CEDES. An diesem Print wurden keine
Änderungen an der Harware vorgenommen. Die Haltevorrichtung für den TOF-Print,
der grosse Beleuchtungsprint und der Aluminiumwinkel wurden neu konstruiert.
Seite 113 Evaluation und Aufbau Geschwindigkeitssensor
Abbildung 3-2: Aufbau des TOF Geschwindigkeitssensors
3.1 Elektronischer Aufbau
Aus dem Elektronikschema kann man entnehmen, dass CEDES pro Strang zwei LEDs
in Serie schaltet. Angesteuert werden die 8 Stränge durch bipolare Transistoren. Zum
Startzeitpunkt dieser Bachelorarbeit testete CEDES bereits eine Ansteuerung von
mehr als zwei LEDs in Serie, geschaltet durch einen MOSFET.
Durch Streuung und tiefe Reflexionsfaktoren geht viel optische Leistung verloren. In
Abbildung 3-3 wird die Problematik wiedergegeben. Es darf nicht unterschätzt werden,
dass die Sonne im Wellenlängenbereich um 850 nm eine beachtliche Strahlungsinten-
sität besitzt. Gefordert ist also eine leistungsstarke Sendequelle, um die Belichtungs-
zeit kurz zu halten.
Seite 123 Evaluation und Aufbau Geschwindigkeitssensor
Abbildung 3-3: Reflexionswinkel am Target
In einer ersten Testphase wurde ein Beleuchtungsprint mit 10 LEDs in Serie angefertigt
(Abbildung 3-4).
Abbildung 3-4: 10-LED-Print
3.1.1 Hardwarekomponenten 10-LED-Print
Nachfolgend werden die wichtigsten Hardwarekomponenten, die die Evaluation für sich
entscheiden konnten, mit deren Eigenschaften und Vorteilen kurz beschrieben.
IR-Lumnezdiode SFH4550 (850 nm) [3]
• Infrarot LED im gewünschten Wellenbereich 850 nm mit hoher Ausgangsleis-
tung
• Durch den engen Abstrahlwinkel von ± 3 ° entfällt die Optik
• Die sehr schnelle Schaltzeit von 10 % auf 90 % bei 100 mA beträgt gerade
12 ns
Seite 133 Evaluation und Aufbau Geschwindigkeitssensor
MOSFET PMF370XN [4]
• Sehr kleine Gate-Ladung von 0.65 nC
• Geringer RDSon von 550 mΩ
Treiber 74LVC1G126 [5]
• Sehr kurze Flanken Anstiegs- und Abfallzeit
• Hoher Ausgangsstrom von ±24 mA
3.1.2 Berechnungen und Schaltungsbeschreibung 10-LED-Print
Die Schaltung wird mit 24 VDC Spannung versorgt. Aus dem Datenblatt im elektroni-
schen Anhang kann man entnehmen, dass bei einem angestrebten Stromfluss von
200 mA pro Leuchtdiode ca. 1.68 V abfallen. Der Spannungsabfall über den MOSFETs
ist sehr gering, pro Bauteil 0.047 V. Der Vorwiderstand wird nach Formel 8 bis Formel
10 berechnet. Es wird ein Strangstrom von 200 mA angestrebt. Da die LEDs mit einem
Tastverhältnis von 50% angesteuert werden, darf in der eingeschalteten Phase der
doppelte Strom fliessen als beim Betrieb mit Gleichspannung erlaubt wäre.
DEFGH IJ = KLM N ∙ OMPQ:NR = 0.37Ω ∙ 0.2
Formel 8
DEFGH IJ = 0.047T
DEFGH IJ : Spannungsabfall 0.047 V je MOSFET bei 200 mA
KLM N : Widerstand je MOSFET 370 mΩ bei VGS = 4.5 V; ID = 0.2 A; Tj = 25 °C
OMPQ:NR : Strangstrom von 200 mA
DU Q = DV P − 10 ∙ DMGWXYY − 2 ∙ DEFGH IJ = 24T − 10 ∙ 1.68T − 2 ∙ 0.047T
Formel 9
DU Q = 7.106T
DU Q : Spannung am Vorwiderstand [V]
DV P Totale Strangspannung = 24 V
DMGWXYY : Spannungsabfall 1.68 V je LED bei 200 mA
DU Q 7.106T
KU Q = = = 35.53Ω ≈ 33.33Ω
OMPQ:NR 0.2 Formel 10
KU Q : Vorwiderstand R1 ║ R2 ║ R3 [Ω]
Seite 143 Evaluation und Aufbau Geschwindigkeitssensor
V24
C3 C1
R1 R2 R3
100nF 1000uF
100 100 100
LED1 LED2 LED3 LED4 LED5
SFH4550 SFH4550 SFH4550 SFH4550 SFH4550
LED6 LED7 LED8 LED9 LED10
SFH4550 SFH4550 SFH4550 SFH4550 SFH4550
V24
R4
4K7
Q1
PMF370XN
D1 C4
BZX84-C20V 100nF
GND
D2
Q2
PMF370XN
V5
1N4148
U1
R5 Q3
20 MHz Clock C5 2N2907A
1K
1uF
74LVC1G126
GND
Abbildung 3-5: Schema 10-LED-Print
Als Stützkondensatoren walten C1 und C3. Diode D2 in Verbindung mit dem Bipolar-
Transistor Q3 sollen ein schnelles Entladen des Q2-Gates ermöglichen. Q1 versucht
den Millereffekt der Transistorschaltung zu reduzieren. Es konnte jedoch kein positiver
Effekt festgestellt werden.
Seite 153 Evaluation und Aufbau Geschwindigkeitssensor
3.1.2.1 Testresultate und Folgerungen 10-LED-Print
Die wichtigsten Punkte sind hier zusammengefasst. Details und die Messprotokolle
können im Anhang nachgelesen werden.
• Weil die Schaltung mit 20 MHz getaktet wird, erweist sich der Elektrolytkonden-
sator C1 als ungeeignet. Er verhält sich viel zu träge und kann deshalb wegge-
lassen werden.
• Die Gate-Ansteuerung von Q2 arbeitet im gewünschten Frequenzbereich nicht
zufriedenstellend. Verbindet man den Treiberausgang direkt mit dem Gate-
Anschluss von Q2, verbessert sich die Schaltcharakteristik massiv.
• Q1 kann komplett weggelassen werden.
Für Q2 wurden ebenfalls Versuche mit dem Feldeffekttransistor 2N7002K [6] durchge-
führt mit dem Ergebnis, dass dieser Typ ein langsameres Schaltverhalten besitzt.
3.1.3 Augensicherheit und optische Leistung
Damit die Geschwindigkeitskamera ein aussagekräftiges Distanzbild erzeugen kann,
muss möglichst viel optische Leistung abgestrahlt werden, was jedoch im Widerspruch
zur Augensicherheit steht. Um eine thermische Schädigung der Hornhaut und mögliche
Langzeiteffekte auf die Linse des Auges zu verhindern, dürfen die von Electro Suisse
[7] herausgegebenen Normwerte nicht überschritten werden. Die Berechnungen kön-
nen im M-File Beleuchtung.m aus dem Anhang nachvollzogen werden. Abbildung
3-6 zeigt die maximale Bestrahlungsdauer für das menschliche Auge im Verhältnis
zum Abstand und der Zeit. Die blaue Linie zeigt die theoretische Bestrahlungsstärke.
Durch Messungen in einer Entfernung von 1 m und 2 m (violette Punkte) wurde jedoch
festgestellt, dass die Bestrahlungsstärke in Wirklichkeit geringer ist. Schaut man weni-
ger als 1000 Sekunden auf die 100 LEDs aus einer Entfernung von 1 m, so besteht
keine Gefahr für die Hornhaut und die Linse des Auges. Pro LED wurde eine optische
Leistung von 0.05 W kalkuliert. Für die thermische Schädigung der Netzhaut bei
schwachem optischen Reiz gilt der Grenzwert für die Strahldichte nach Formel 11.
6000
[\] ≤ ` ∗ 47 ∗ A 7
Formel 11
_
[\] : Spektrale Strahldichte [W·m-2·sr-1]
_: Winkelausdehnung [rad]
Die Winkelausdehnung α beträgt in unserem Fall 0.0375 rad was zu einer erlaubten
Strahldichte von 160'020 W·m-2 führt. Unsere Beleuchtunskonfiguration kommt auf eine
Strahldichte von 9'217 W·m-2 und ist somit erlaubt.
Seite 163 Evaluation und Aufbau Geschwindigkeitssensor
Bestrahlungsstärke
4
10
t = 10s
3
10
t = 100s
Bestrahlungsstärke [W/m 2]
2
t = 1000s
10
1
10
0
10
0 2 4 6 8 10 12 14 16 18 20
Enternung [m]
Abbildung 3-6: Maximale Bestrahlungsdauer für menschliches Auge
3.1.4 Aufbau definitiver Beleuchtungsprint
Der definitive Beleuchtungsprint (100-LED-Print) wurde nach dem Vorbild aus Abbil-
dung 3-5 (Testprint mit 10 LEDs) aufgebaut. Um möglichst flexibel auf optische Leis-
tungsanforderungen reagieren zu können, befinden sich auf dem Print zehn Stränge
mit insgesamt 100 LEDs. Jeder Strang kann durch einen Jumper zugeschaltet werden.
Beschaltet wird der Strang durch einen MOSFET PMF370XN in Verbindung mit einem
Treiber 74LVC1G126. Der Treiber liefert genügend Strom für ein schnelles Auf- und
Entladen des MOSFET Gates.
Jeder Strang ist mit einer Ferritperle [8] (L1 in Abbildung 3-7 auf der nächsten Seite)
versehen. Diese Induktivität verringert elektromagnetische Abstrahlungen. Dabei wer-
den durch Glättung abrupter Stromänderungen hochfrequente Anteile herausgefiltert.
Der Vorwiderstand besteht aus zwei parallel geschalteten 1206 SMD Widerständen.
Das vollständige Schema findet man im Anhang.
Seite 173 Evaluation und Aufbau Geschwindigkeitssensor
V24
W1
Jumper
600 R @ 100 MHz
L1 C1
R1 R2 100nF
39 39
LED1 LED2 LED3 LED4 LED5
SFH4550 SFH4550 SFH4550 SFH4550 SFH4550
LED10 LED9 LED8 LED7 LED6
SFH4550 SFH4550 SFH4550 SFH4550 SFH4550
Q1
PMF370XN
R3 R4
10k 0
V5
U1
C2 74LVC1G126
1uF
GND GND
i Parameter Set
Length Constraint [Min Length = 0mm Max Length = 70mm]
Short-Circuit Constraint [Short Circuit - Allowed]
20MHzClock
Abbildung 3-7: Strang mit 10 LED's
Zur Erzeugung der 5 VDC Spannungsversorgung wird der Buck-Konverter
TPS5410 EP von Texas Instruments verwendet. Unter Dauerbelastung liefert der Auf-
bau aus Abbildung 3-7 bis 1 A Strom am Ausgang.
V24 V5
U2 C3
Supply: 7-35V 7 1 L2
VIN BOOT
68uH
5 10nF R5 C4
ENA 2.7nF
10k
C5 2 8 D1 C6 C7
NC PH
4.7uF D Schottky 47uF 47uF
35V max 3
NC
R6
6 4 1.78k
GND VSNS
TPS5410-EP
C8 R7 C9
GND 150pF 56nF
3.24k
GND
Abbildung 3-8: Buck-Konverter 24 VDC - 5 VDC
Seite 183 Evaluation und Aufbau Geschwindigkeitssensor
3.2 Mechanischer Aufbau Geschwindigkeitssensor
Ein Aluminiumwinkel dient als Hauptträger für den Sensoraufbau. Der 100-LED-Print
kann mit vier M3-Schrauben befestigt werden. Für die LEDs (THT-Technologie) gibt es
100 Löcher. Diese Löcher haben zwei wichtige Funktionen. Zum einen werden die
LEDs parallel ausgerichtet und zum anderen wird die Wärmeabfuhr durch das Alumini-
umblech massiv gesteigert.
Abbildung 3-9: Dreiseitenansicht Geschwindigkeitssensor
Abbildung 3-9 zeigt, dass der TOF-Print in die Fotokamera Minolta DX7 eingebettet ist.
Der CCD Chip befindet sich genau im Zentrum der Optik. Die auswechselbaren Objek-
tive erleichtern Anpassungen in der Testphase enorm. Im Gegensatz zu modernen
High-End Objektiven filtern die Linsen Infrarotlicht im Wellenlängenbereich 850 nm
nicht heraus, ein willkommener Umstand für diese Anwendung.
Alle CAD-Files sind im elektronischen Anhang abgelegt. Die 2D-Zeichnungen findet
man auch im Anhang.
Seite 194 Software
4 Software
Die Arbeitsschritte, die zur Geschwindigkeitsmessung erforderlich sind, werden in die-
sem Kapitel beschrieben. Die Arbeitsschritte sollten dabei günstig auf den DSP des
Sensorprints und das MATLAB Programm auf dem PC aufgeteilt werden. Grundsätz-
lich sind folgende Schritte zur Messung der Geschwindigkeit eines Objektes notwen-
dig:
1. Erzeugen der Schaltsignale für die Beleuchtung
2. Auslesen des Bildsensors
3. Berechnung der Distanz für jedes Pixel
4. Zeitmessung
5. Übertragung des Distanzbildes zum PC
6. Finden des bewegten Objektes
7. Berechnung der Geschwindigkeit
8. Anzeige des Bildes und der Messdaten
Da der Arbeitsspeicher des DSP mit 12 KB (12288 Byte) sehr klein ist, ist es nur knapp
möglich, ein Distanzbild mit 24 · 80 Pixel · 16 bit = 3840 Byte im Speicher zu halten,
während das Darauffolgende berechnet wird. Die Berechnung benötigt prinzipbedingt
doppelt so viel Speicher wie für die Speicherung eines fertigen Bildes nötig ist, da für
jedes Distanzbild zwei phasenverschobene Bilder benötigt werden. Insgesamt wäre
also mindestens Speicherkapazität für 3 Bilder (11520 Byte) plus der nötigen Arbeits-
variablen erforderlich. Um in der Verarbeitung der Daten nicht durch den kleinen
verbleibenden Arbeitsspeicher begrenzt zu sein und eine möglichst hohe Framerate zu
erreichen, werden die Arbeitsschritte 6 bis 8 auf dem PC mithilfe von MATLAB durch-
geführt. Dies bietet darüber hinaus die Möglichkeit, die Bildverarbeitungsfunktionen von
MATLAB verwenden zu können. Für eine kommerzielle Anwendung des entwickelten
Systems wäre es sinnvoll einen schnelleren DSP mit mehr Speicher zu verwenden, um
alle Verarbeitungsschritte auf einem Prozessor durchführen zu können.
4.1 DSP Software
Die uns zur Verfügung gestellte Demo-Software für den Sensorprint beinhaltet bereits
einen grossen Teil der nötigen Funktionen, ist aber für die Anwendung als Türsensor
bestimmt und an diesen Verwendungszweck angepasst. Für die Verwendung als Ge-
schwindigkeitsradar gelten andere Anforderungen, die es notwendig machten, die
Software teilweise zu verändern. In den folgenden Abschnitten werden die Änderungen
einzeln aufgeführt und beschrieben.
Seite 204 Software
4.1.1 Zeitmessung
Zur Geschwindigkeitsmessung wird die zurückgelegte Strecke pro Zeiteinheit gemes-
sen. Daher ist es nötig, die Zeit zu messen, die zwischen zwei aufgenommenen Bildern
vergangen ist. Um diese Funktion zu realisieren, wird ein Timerbaustein des Prozes-
sors verwendet, der zuvor noch frei war. Der Timer wird gestartet bevor ein Bild aufge-
nommen wird und misst die Zeit bis zum Beginn der Aufnahme des nächsten Bildes.
Die abgelaufene Zeit wird im Kopf des Datenpaketes mit dem Bild an den PC zur wei-
teren Verarbeitung gesendet. Die vorgenommenen Änderungen sind im Anhang aufge-
führt.
4.1.2 Reichweite
Die Reichweite einer TOF-Kamera ist abhängig von der Stärke der Beleuchtung, der
Belichtungszeit und den Reflexionseigenschaften des beleuchteten Objektes. Die An-
wendung als Türsensor erfordert nur sehr geringe Reichweiten im Bereich von 0 m bis
2.5 m. Aus diesem Grund und um Rauschen durch zu geringe Beleuchtungsstärke zu
vermeiden, war die Reichweite softwaremässig auf 2.5 m beschränkt. Da unsere Be-
leuchtung wesentlich leistungsfähiger ist und zur Geschwindigkeitsmessung die maxi-
mal mögliche Reichweite ausgenutzt werden sollte, wurde die Reichweitenbegrenzung
entfernt.
4.1.3 Bildrate
Die von CEDES erhaltene Software benötigte zur Aufnahme eines Bildes 244 ms bei
einer Belichtungszeit von 10 ms, dies ergibt eine Bildrate von 1/0.244 s = 4.1 Bildern
pro Sekunde (fps). Diese Bildrate würde bei einer maximalen Distanz von 7.5 m, die
sich aus der Modulationsfrequenz vom 20 MHz ergibt, zu einer maximal messbaren
Geschwindigkeit von 55.23 km/h führen (Formel 12).
:; 7.54 4 B4
5≤ = = 15.37 = 55.23 Formel 12
2 ∗ =>? 2 ∗ 0.244A A ℎ
5: Maximale Geschwindigkeit [m/s]
:; : Maximale Distanz (Halbe Wellenlänge) [m]
=>?: Zeit für Bildaufnahme [s]
Um den Prozess der Bildaufnahme zu beschleunigen, wurde jeder Schritt der Aufnah-
me und Übertragung der Bilddaten über die Schnittstelle zum PC nach Optimierungs-
möglichkeiten untersucht. In Tabelle 4-1 sind die Zeiten aufgeführt, die bei einer Belich-
tungszeit von 10 ms für jeden Schritt benötigt werden.
Seite 214 Software
Tabelle 4-1: Verarbeitungszeit für ein Distanzbild
Arbeitsschritt Zeit
Integration der Photonen 50.8 ms
Auslesen des Sensors 31.6 ms
Grauwertbild berechnen 98.4 ms
Distanzbild berechnen 16.7 ms
Übertragung bei 921'600 Baud 46.5 ms
Total 244.0 ms
Die Integrationszeit ist die Belichtungszeit inklusive der PWM Ansteuerung. Sie ist von
der Leistung der Beleuchtung sowie den Umgebungsbedingungen abhängig und ein-
stellbar. Die Zeit für das Auslesen des Sensors kann nicht verkürzt werden, da das
Timing im Datenblatt des TOF-Sensors eingehalten werden muss. Bei genauerer Be-
trachtung der Berechnungen im Prozessor fiel auf, dass zur Berechnung des Grau-
wertbildes nach Formel 13,
= !(0 − 2) + (1 − 3) Formel 13
: Amplitude des reflektierenden Signals (Grauwert)
die Wurzelfunktion aus der C-Standardbibliothek verwendet wurde, die mit 98.4 ms
Berechnungszeit für 24x80 Pixel sehr viel Zeit benötigt. Texas Instruments bietet mit
ihrer QMath-Bibliothek [9] eine für den verwendeten Prozessor optimierte Mathematik-
bibliothek kostenlos an. Durch Ersetzen der Wurzelfunktion mit der optimierten Funkti-
on konnte die benötigte Zeit auf etwa 3 ms reduziert werden. Im selben Zug wurde die
Arcustangensfunktion zur Berechnung der Distanz durch die Funktion qatan() aus
der selben Bibliothek ersetzt. Dadurch konnten weitere 3.68 ms eingespart werden,
zudem konnte der C-Code übersichtlicher gestaltet werden.
Die dritte wichtige Geschwindigkeitsoptimierung betrifft die Übertragung der Daten über
die serielle Schnittstelle. Mit 921'600 Baud ist die Übertragungsgeschwindigkeit bereits
an der oberen Grenze. Versuche, die Baudrate zu erhöhen, resultierten in Übertra-
gungsfehlern und wurden deshalb aufgegeben. Der Schnittstellenbaustein des einge-
setzten Prozessors verfügt jedoch über ein 16 Byte grosses FIFO, in dem Daten abge-
legt werden können, um anschliessend automatisch übertragen zu werden. Diese
Funktion in Verbindung mit interruptgesteuertem Auffüllen des FIFO wurde folgender-
massen eingesetzt.
Nachdem ein Distanzbild berechnet wurde und zur Übertragung bereitsteht, wird der
Sendeinterrupt freigeschaltet, was zu einer weitgehend automatischen Übertragung
der Daten führt, während der Prozessor bereits das nächste Bild aufnehmen kann.
Seite 224 Software
Aufgrund des Mangels an Arbeitsspeicher kann jedoch nur ein Teilbild aufgenommen
werden solange die Übertragung des alten Bildes andauert. Die Belichtungssequenz
musste aus diesem Grund ebenfalls angepasst werden. Ursprünglich lief die Belich-
tungssequenz wie in Abbildung 2-4 auf Seite 5 gezeigt ab. Dabei wurde in Phase 1 das
Bild A0-A2 und in Phase 2 das Bild A1-A3 aufgenommen. In Phase 3 und 4 wurden,
wie beschrieben, Fertigungstoleranzen des Sensors ausgeglichen. Da sich das zu
übertragende Distanzbild im gleichen Speicherbereich befindet wie das Bild A1-A3,
darf dieser Bereich bis zur Fertigstellung der Übertragung nicht überschrieben werden.
Es kann daher Zeit zur Übertragung gewonnen werden, wenn zuerst die Belichtungs-
phasen 1 und 3 ablaufen und nach fertiger Übertragung die Phasen 2 und 4. Durch
Versuche wurde festgestellt, dass die Übertragung des alten Bildes bei einer Belich-
tungszeit von 8 ms und mehr bereits fertig war, bevor Phase 2 des neuen Bildes an-
fing. Bei der Belichtungszeit von 8 ms ist daher das Optimum zwischen möglichst ho-
her Geschwindigkeit und möglichst langer Belichtungszeit erreicht. Tabelle 4-2 führt die
Zeiten der einzelnen Arbeitsschritte und die Zeitersparnis nach der Optimierung auf
(Belichtungszeit = 10 ms).
Tabelle 4-2: Zeitersparnis nach Optimierung
Arbeitsschritt Zeit Ersparnis
Integration der Photonen 50.8 ms 0.0 ms
Auslesen des Sensors 31.6 ms 0.0 ms
Grauwertbild berechnen 2.5 ms 95.9 ms
Distanzbild berechnen 5.4 ms 11.3 ms
Übertragung bei 921'600 Baud und Sonstiges 2.3 ms 44.2 ms
Total 92.6 ms 151.4 ms
Die aufgeführten Optimierungen führten zu keiner Verschlechterung der Bildqualität
und wurden daher beibehalten. Die Bildrate bei 10 ms Belichtungszeit beträgt nun
1/0.0926 s = 10.8 fps und die maximal messbare Geschwindigkeit 145.8 km/h, was für
unsere Anwendung mehr als ausreichend ist.
4.2 Objektverfolgung
4.2.1 Stillstehende Objekte entfernen
Die Kamera nimmt fortlaufend Bilder auf, die Distanzinformationen sämtlicher reflektie-
render Objekte im Sichtbereich enthalten. Darunter befinden sich bewegte Gegenstän-
de wie Autos oder Fussgänger und feststehende Objekte wie zum Beispiel Verkehrsta-
feln oder Strassenlaternen. Abbildung 4-1 zeigt eine typische Situation.
Seite 234 Software
Abbildung 4-1: Geschwindigkeitskamera im Einsatz
Für unsere Anwendung der Geschwindigkeitsmessung sind grundsätzlich nur bewegte
Objekte interessant. Im ersten Schritt der Bildverarbeitung geht es darum, sämtliche
feststehenden Objekte aus dem Bild zu entfernen. Die einfachste Möglichkeit dies zu
erreichen ist, von jedem Bild das vorherige Bild pixelweise zu subtrahieren. Dadurch
wird jedes unveränderte Pixel auf den Wert Null gesetzt. Als Ergebnis erhält man ein
Bild, das nur noch Objekte enthält, die sich seit dem letzten Bild bewegt haben. Da das
Kamerabild ein beleuchtungsstärkenabhängiges Rauschen enthält, werden auch Pi-
xelwerte, die zu unbewegten Objekten gehören nach der Subtraktion nicht genau null.
Sie haben einen Wert, der zwischen der zweifachen negativen und positiven Rausch-
amplitude liegen kann. Aus diesem Grund ist es erforderlich, eine minimale Geschwin-
digkeit oberhalb der zweifachen Rauschamplitude anzugeben, ab welcher ein Objekt
als bewegt angenommen wird.
In Abbildung 4-2 ist ein Distanzbild zu sehen wie es von der Kamera empfangen wird.
Am linken Rand ist eine reflektierende Verkehrstafel zu sehen, während auf der rech-
ten Seite ein von der Kamera wegfahrendes Auto zu sehen ist. Die Rücklichter und das
Kennzeichen reflektieren wesentlich besser als der Rest des Autos. In Abbildung 4-3
ist das Ergebnis der im vorigen Abschnitt beschriebenen Operation zu sehen. Die Ver-
kehrstafel wurde fast komplett aus dem Bild entfernt, während das Abbild des beweg-
ten Autos beinahe unverändert blieb.
Seite 244 Software
Abbildung 4-2 Distanzbild
Abbildung 4-3 Feststehende Objekte entfernt
4.2.2 Binärbild erzeugen
Die Aufgabe besteht nun darin, von den bewegten Gegenständen den richtigen aus-
zuwählen. Dazu muss ein sogenanntes Binärbild erzeugt werden,
werden das nur die Pixelwer-
Pixelwe
te "0" und "1" enthält. Dies ist notwendig,
notwendig um die später erforderlichen MATLAB-Funk-
tionen anwenden zu können. Grössere,
Grössere flache Objekte wie Nummernschilder
Num oder
Scheinwerfer erscheinen im Distanzbild als Fläche ähnlicher Farbe. Dies nutzen wir,
wir
um Pixelgruppen ähnlicher Distanz zusammenzufassen. Der gesamte messbare Dis-
Di
tanzbereich wird dazu in eine einstellbare Anzahl Gruppen unterteilt. Die Gruppe,
Grup der
die meisten Pixel angehören,
angehören wird ausgewählt und alle zugehörigen
n Pixel im Binärbild
mit einer "1" markiert.
Am Beispiel des Kamerabildes aus Abbildung 4-2 besitzt die Gruppe der hellroten Pixel
die meisten zugehörigen Pixel. Die Verteilung ist in Abbildung 4-4 als Histogramm dar-
da
gestellt. Die hellroten Pixel fallen hier in die Gruppe 25, die alle Pixel mit einer Entfer-
Entfe
nung zwischen 6.215 m und 6.472 m enthält. Die so ausgewählten Pixel werden nun
auf den Wert "1" gesetzt, alle anderen erhalten den Wert "0".. Das Ergebnis ist in Abbil-
dung 4-5 zu sehen.
Seite 254 Software
Abbildung 4-4 Histogramm
Abbildung 4-5 Binärbild
4.2.3 Entfernung messen
essen
Die im letzten Schritt gekennzeichneten Pixel ähnlicher Distanz können nun auf zu-
z
sammenhängende Flächen untersucht werden. Ziel ist es, die grösste Fläche zu finden
und deren Distanz zu bestimmen,
bestimmen falls diese gross genug für eine genaue Messung ist.
MATLAB bietet mit derr Funktion regionprops eine gute Möglichkeit , zusammen-
hängende Pixelgruppen zu finden und eine Vielzahl an Informationen über sie zu erhal-
erha
ten. Ist die gewünschte Gruppe bestimmt, kann über den Durchschnitt der ausgewähl-
ausgewäh
ten Pixel die Entfernung zum Objekt berechnet werden. In Abbildung 4-6 handelt es
sich um ein kurz nach dem bisherigen Bild aufgenommenes Kamerabild. Die ausge-
ausg
wählte Fläche ist darauf mit einem roten Rechteck gekennzeichnet. Der rote Stern
markiert den Schwerpunkt der Fläche.
Seite 264 Software
Abbildung 4-6 Ausgewählte Fläche
4.2.4 Geschwindigkeit berechnen
Da die Entfernung zum Objekt nun
nun bekannt ist, kann durch Subtraktion des letzten Ent-
En
fernungsmesswertes die Strecke bestimmt werden,
werden die das Objekt in der Zeit zwischen
den Bildern zurückgelegt hat. Die abgelaufene Zeit wird im Kopf des Bilddatenpaketes
von der Kamera zum PC gesendet und kann nun zur Berechnung der Geschwindigkeit
des Objektes verwendet werden.
Um eine korrekte Geschwindigkeitsmessung zu gewährleisten,
gewährleisten muss sichergestellt
werden, dass bei beiden Bildern dasselbe Objekt ausgewählt wurde. Es wurden ver-
ve
schiedene
iedene Möglichkeiten
Möglichkeite untersucht dies zu bewerkstelligen.. Naheliegend wäre, die
Form des Objektes auf bestimmte Eigenschaften zu untersuchen und im darauffolgen-
darauffolge
den Bild unter Berücksichtigung der Grössenänderung das gleiche Objekt wiederzufin-
wiederzufi
den. Da jedoch nur 24x80 Pixel zur
zu Verfügung stehen, sehen die meisten Objekte ab
einer gewissen Entfernung kreisförmig bis oval aus. Wir beschränken uns deshalb auf
eine Positionskontrolle innerhalb des Bildes. Befindet sich der Schwerpunkt
Schwerpun des Mess-
bereichs weiter vom letzten entfernt als ein einstellbarer Grenzwert,, kann relativ sicher
gesagt werden, dass es sich nicht um dasselbe Objekt handelt.. Die Messung würde
wür in
diesem Fall für ungültig erklärt, um eine Falschanzeige zu vermeiden. Der Grenzwert
für die maximale Entfernung der beiden Schwerpunkte muss abhängig vom Winkel der
Kamera zur Strasse und der zu erwartenden Geschwindigkeit der Fahrzeuge ange-
ang
passt werden. In Abbildung 4-6 ist die Begrenzungslinie als grüner Kreis um den
Schwerpunkt der Fläche zu sehen,
sehen die für die vorangegangene Distanzmessung ver-
ve
wendet wurde. In diesem Fall liegt der neue Schwerpunkt, der durch
dur den roten Stern
gekennzeichnet ist, innerhalb des Kreises. Dies bedeutet,, dass beide Distanzwerte
zum selben Objekt gehören und daher zur Geschwindigkeitsberechnung verwendet
werden dürfen.
Seite 274 Software
4.3 Benutzeroberfläche
Die in Kapitel 4.2 beschriebene Objektverfolgung, die Kommunikation mit der Kamera
und die Anzeige der Ergebnisse wurde in einem Programm mit Benutzeroberfläche
kombiniert. In diesem Kapitel werden die Bedienung
Bedienung und die Funktionen dieses Pro-
Pr
grammes erläutert. In Abbildung 4-7 ist eine Aufnahme der Benutzeroberfläche zu se-
s
hen. Im oberen Drittel des Fensters werden die Kommunikationseinstellungen,
Kommunikationseinstellungen, die Ka-
K
meraeinstellungen und die Programmsteuerung vorgenommen. In
I der Mitte des Fens-
Fen
ters werden das Kamerabild und Informationen zur Objektverfolgung angezeigt. Der
untere Teil zeigt die Ergebnisse der Distanz-
Distanz und Geschwindigkeitsmessung
messung an.
Abbildung 4-7: Screenshot MATLAB GUI
4.3.1 Datenquelle
Zuerst muss die Auswahl der Datenquelle im linken oberen Rand des Fensters (Data
(
Input) erfolgen. Im normalen Betrieb wird die serielle Schnittstelle ausgewählt,
ausgewählt um
Daten in Echtzeit von der Kamera zu empfangen. Alternativ dazu können jedoch zuvor
aufgenommene Bildersequenzen aus einer Datei geladen und neu ausgewertet wer-
we
den. Diese Funktion ist für Testzwecke sehr nützlich. Die Kommunikation
Kommunikat mit der Ka-
mera läuft über einen Seriell-zu-USB
Seriell USB Wandler, für den ein Treiber installiert werden
Seite 284 Software
muss [10]. In den Treibereinstellungen kann ein virtueller COM-Port ausgewählt wer-
den, dessen Nummer im linken oberen Feld angegeben wird. Die Kamera sendet Da-
ten mit einer Baudrate von 921'600 Baud, die standardmässig bereits eingestellt ist. Mit
dem Knopf Open wird entweder die serielle Schnittstelle oder die angegebene Datei
geöffnet.
4.3.2 Programmsteuerung
Die Gruppe Control beinhaltet die Programmsteuerfunktionen. Nachdem eine Da-
tenquelle ausgewählt und mit Open geöffnet wurde, kann mit dem Knopf Run das Pro-
gramm gestartet werden. Vor dem Starten kann die Objektverfolgung, die im Kapitel
4.2 beschrieben wurde, durch die Auswahl von Auto im Feld Tracking verwendet
werden. Zu Testzwecken kann der Messbereich durch die Anwahl von Manual per
Maus ausgewählt werden.
4.3.3 Aufnahme
Sollen die empfangenen Bilder aufgezeichnet werden, ist der Knopf Record vor dem
Starten zu drücken. Zum Stoppen der Aufnahme muss erst der Knopf Stop, dann der
Knopf Stop Recording betätigt werden. Die Aufnahme wird auch ohne manuelles
Stoppen beendet, wenn eine im Sourcecode einstellbare Anzahl Bilder aufgenommen
wurde. Die aufgezeichneten Bilder werden nach der Aufnahme im selben Verzeichnis
gespeichert, in dem sich das Programm befindet. Der Dateiname wird automatisch aus
den Buchstaben "Rec_" und der aktuellen Zeit zusammengesetzt. Die Aufnahmedatei
enthält die empfangenen Distanzbilder im Format 24x80x16 bit sowie die Zeit zwischen
den Aufnahmen in Millisekunden. Bei der Aufnahme ist zu beachten, dass ein leis-
tungsfähiger Computer verwendet wird, um die anfallenden Daten schnell genug ver-
arbeiten zu können. Ist der Computer zu langsam, so werden einzelne Bilder ausge-
lassen, was eine spätere Auswertung der Daten erschwert.
4.3.4 Kameraeinstellungen
Im Feld Camera Settings können Einstellungen wie Belichtungszeit und Art der
Kameradaten eingestellt werden. Die Belichtungszeit sollte möglichst kurz gewählt
werden, um eine Übersteuerung der Kamerapixel durch Umgebungslicht zu verhindern
und eine möglichst hohe Bildrate zu erreichen. Gleichzeitig muss sie aber gross genug
sein, um eine genügend hohe Reichweite zu erlangen. Zur Geschwindigkeitsmessung
muss im Auswahlfeld Kind of Picture entweder Distance oder Distance Int
ausgewählt sein. Durch die Auswahl von Distance Int findet die Übertragung, wie
Seite 29Sie können auch lesen